Изобретение относится к системам связи и навигации и может быть использовано для оперативной доставки команд управления и коррекции инерциальных навигационных комплексов автономных обитаемых подводных объектов (ПО), например, подводных аппаратов, находящихся на рабочих глубинах погружения, а также для доставки служебной информации с погруженных ПО в центры управления (подводного, надводного, наземного или воздушного базирования).
Известен способ доставки команд на погруженные подводные лодки (ПЛ) с использованием утечки в океан радиоволн крайне низких частот (КНЧ), распространяющихся в естественном волноводе «земля - ионосфера» (см., например, статью «Дальняя связь на крайне низких частотах», ТИИЭР, 1974 г., т.62, стр.5-30), который реализован в проекте «Сангвин» и с 1986 г. применяется в интересах боевого управления подводными лодками ВМС США.
В известном способе:
- из стационарного наземного центра управления осуществляют всенаправленное излучение частотно-манипулированного, в соответствии с символами двоичного сверточного кода, радиосигнала на крайне низкой (как правило, менее 100 Гц) несущей частоте;
- на подводной лодке регистрируют утечки энергии в океан электромагнитной волны крайне низкой частоты, которая распространяется от наземного центра управления в волноводе «земля - ионосфера»;
- компенсируют влияние океана на принимаемое излучение методом усиления амплитуд «высокочастотных» компонент сигнала и коррекции их фаз;
- подавляют помехи от силовых энергоустановок подводной лодки методом следящей режекции;
- сглаживают атмосферные помехи, вводя нелинейные предискажения в принимаемый КНЧ-сигнал;
- выполняют согласованную фильтрацию, при которой каждая выборка принимаемой смеси сигнала и шума коррелируется с синфазной и квадратурной копиями передаваемых сигналов;
- демодулируют канальные символы, объединив их выходные сигналы после согласованной фильтрации и используя псевдослучайную последовательность, которая идентична последовательности передатчика наземного центра;
- оценивают фазу принимаемого сигнала и компенсируют фазовые ошибки;
- восстанавливают первоначальную кодовую последовательность и декодируют передаваемую команду.
Основные недостатки известного способа:
- низкая скрытность;
- большая длительность сеанса связи;
- низкая защищенность от несанкционированного перехвата сигналов и от помехового подавления;
- высокая уязвимость крупногабаритного передающего центра от средств вооруженного подавления;
- невозможность двустороннего обмена информацией и, следовательно, невозможность получения с борта ПЛ необходимой для эффективного управления информации;
- чрезвычайно низкая пропускная способность (не более 1 бод) односторонней (от центра ко всем ПЛ, находящимся в Мировом океане) передачи команд;
- невозможность решения задачи коррекции судового инерциального комплекса по КНЧ-сигналам.
Совокупность основных недостатков известного способа исключает его использование в условиях экстремальной обстановки.
Наиболее близким по технической сущности является способ навигации подводных объектов на рабочих глубинах (авторское свидетельство 265188 по заявке №3181100/25832 от 25.04.83 г.).
В известном способе:
- передают лазерные навигационно-связные сигналы с космических аппаратов в океан;
- определяют текущее местоположение космического аппарата (КА) и расхождение бортовой шкалы времени (БШВ) этого аппарата с системным временем системы ГЛОНАСС;
- вводят в передаваемые лазерные сигналы информацию о местоположении космического аппарата и поправках бортовой шкалы времени;
- детектируют и декодируют лазерные сигналы от трех и более космических аппаратов на подводном объекте;
- измеряют псевдодальности между подводным объектом и космическим аппаратом;
- определяют координаты подводного объекта и поправку для судовой шкалы времени относительно системного времени космической навигационной системы (КНС) ГЛОНАСС на основе решения псевдодальномерной задачи.
Известный способ позволяет решить ключевую проблему скрытной доставки на ПО команд управления и обеспечения подводного объекта данными для высокоточного решения навигационной задачи. Однако этот способ обладает существенными недостатками.
Для реализации предлагаемого метода требуются неприемлемо высокие финансовые затраты, связанные с необходимостью развертывания группировки навигационных космических аппаратов (НКА) с мощными лазерными передатчиками, обеспечивающими облучение значительной части Мирового океана.
Известный способ не позволяет скрытно и оперативно получать с погруженным ПО разнородную информацию, в том числе данные о техническом состоянии ПО, квитанции о получении команд оперативного управления, а также другой информации, необходимой для принятия управленческих решений.
Техническая устойчивость координатного обеспечения подводных объектов на основе лазерных измерений навигационных параметров относительно космических аппаратов зависит от технической устойчивости эфемеридно-временного обеспечения (ЭВО) этих аппаратов.
В известном способе ЭВО обеспечивается системой ГЛОНАСС.
Самым слабым элементом этой системы являются радиотехнические стационарные средства наземного комплекса управления, которые могут быть ликвидированы или подавлены преднамеренными действиями.
В этом случае точность ЭВО, а значит координатного обеспечения ПО через несколько суток станет неприемлемо низкой.
Основной вклад в нарастание ошибок координатного обеспечения, по мере устаревания данных наземной поддержки, вносят радиальная составляющая погрешности эфемерид и расхождение бортовых шкал времени навигационных спутников системы ГЛОНАСС. Боковые составляющие местоположения спутника (соответственно узлы и наклонения орбит) допускают высокоточное прогнозирование на несколько месяцев.
Ограничение применения известного способа связано с ослаблением и искажением лазерных навигационно-связных сигналов при прохождении через облака. Следствием этих эффектов являются: снижение скорости передачи и достоверности сообщений при доставке команд управления, снижение точности измерения псевдодальности, уменьшение допустимой глубины погружения ПО при приеме лазерных сигналов, увеличение дискретности обсерваций и т.п.
Таким образом, основными недостатками известного способа являются:
1. Недостаточная эффективность информационного обеспечения.
2. Недостаточные техническая устойчивость и точность координатного обеспечения.
3. Высокая уязвимость от атмосферных факторов, в частности, от затенений обеспечиваемых районов Мирового океана облаками.
4. Высокая стоимость.
Целью изобретения является повышение эффективности информационного обеспечения, а также точности и технической устойчивости координатного обеспечения, снижение уязвимости от метеофакторов и стоимости.
Поставленная цель достигается тем, что известный способ, в котором:
- передают запросные лазерные навигационно-связные сигналы с космического аппарата в океан;
- детектируют и декодируют лазерные запросные навигационно-связные сигналы от трех и более космических аппаратов на подводном аппарате;
- по декодированным сигналам определяют номера спутников и решают задачу взаимной идентификации;
- измеряют псевдодальности между подводным аппаратом и космическими аппаратами;
- определяют координаты подводного оъекта и поправку для судовой шкалы времени относительно системного времени космической навигационной системы на основе решения псевдодальномерной навигационной задачи;
- дополнительно вводят выполнение следующих процедур:
- на подводном объекте регистрируют угловое положение бликов, образованных при прохождении лазерных сигналов спутников через взволнованную поверхность воды, селектируют наиболее яркие из них, излучают в направлениях отселектированных бликов ответные лазерные сигналы, фиксируют время между моментом приема последнего запросного сигнала и моментом излучения первого ответного импульса;
- на спутниках орбитальной группировки на основе анализа облачности излучают сигналы через просветы в облаках, принимают и декодируют ответные сигналы подводного объекта, измеряют временной интервал между моментом излучения последних запросных импульсов и первым ответным импульсом, передают результаты измерений, вводя их в кадр навигационного сигнала в направлении прихода ответного сигнала, принимают и декодируют этот сигнал на подводном объекте и определяют истинную дальность между спутником и подводным объектом с учетом измеренных задержек, глубины погружения подводного объекта и направления излучения ответного сигнала подводного объекта;
- определяют временную поправку бортовых часов подводного объекта относительно спутниковых часов на основе сравнение псевдо- и истинной дальностей;
- на спутниках излучают привязанные к бортовой шкале времени импульсные лазерные сигналы в направлениях нескольких спутников в своей орбитальной плоскости и нескольких спутников в соседних орбитальных плоскостях, измеряют межспутниковые дальности и сдвиги бортовых шкал времени на основе суммарно-разностных соотношений временных интервалов между моментами излучения собственных импульсов и приемом лазерных импульсов от соседних космических аппаратов, привязанных к соответствующим моментам времени относительно бортовых шкал;
- определяют поправки радиальных составляющих эфемерид на основе межспутниковых дальностей, вводят эти поправки в кадры запросных сигналов, излучаемых в направлении обслуживаемого района Мирового океана;
- декодированную информацию, извлекаемую из ответных сигналов подводного объекта, закладывают в формат межспутникового лазерного сигнала и передают через цепочку спутников в заданный район, в котором расположен центр управления действиями подводных объектов.
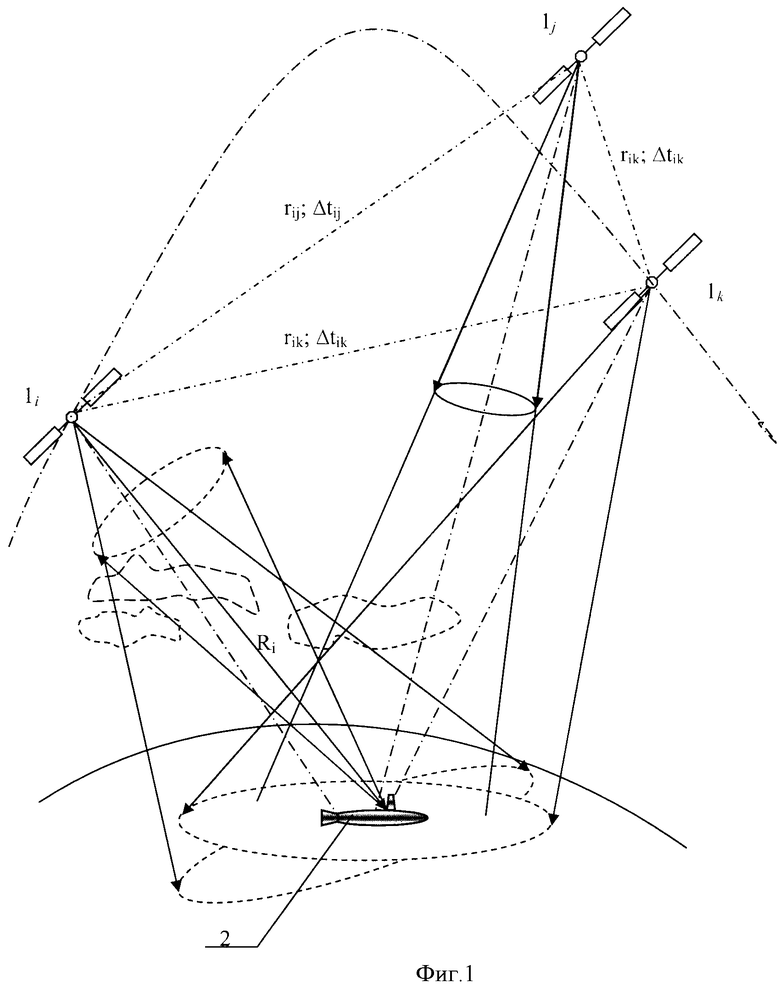
На фигуре 1 представлена общая схема навигационно-связных линий, поясняющая последовательность действий данного способа координатно-временного обеспечения подводных объектов,
где: 1i,j,k - спутники орбитальной группировки (i≠j≠k; i,j,k∈{1, 2…24}),
2 - погруженный подводный объект,
r - межспутниковые расстояния,
Δt - относительные сдвиги бортовых шкал времени соответствующих пар спутников,
R - расстояние между спутником и подводным объектом.
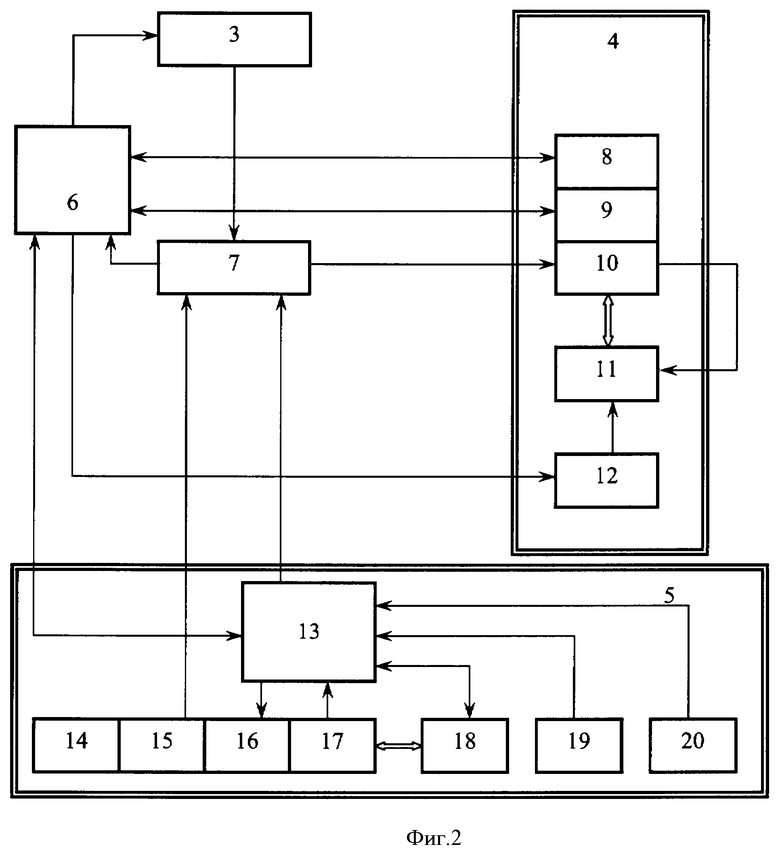
На фигуре 2 представлен пример структуры спутниковой лазерной аппаратуры, реализующей операции данного способа,
где: 3 - астросистема,
4 - межспутниковая лазерная измерительно-связная система (МЛИСС),
5 - лазерная система информационно-координатного обеспечения (ЛСИКО),
6 - бортовая ЦВМ, содержащая эталон частоты и времени,
7 - система согласования координат (ССК),
8 - лазерный дальномер (ЛД),
9 - система передачи информации (СПИ),
10 - оптико-электронный пеленгатор (ОЭП),
11 - система наведения (оптико-механический привод),
12 - система управления наведением и сопровождением (формирователь команд для привода 11),
13 - вычислительно-управляющая система,
14 - панель световозвращателей,
15 - пеленгатор,
16 - лазерная передающая система (ЛПС),
17 - фотоприемная система (ФПС),
18 - система наведения (СН),
19 - широкоугольный координатор (ШК),
20 - датчик облачности (ДО).
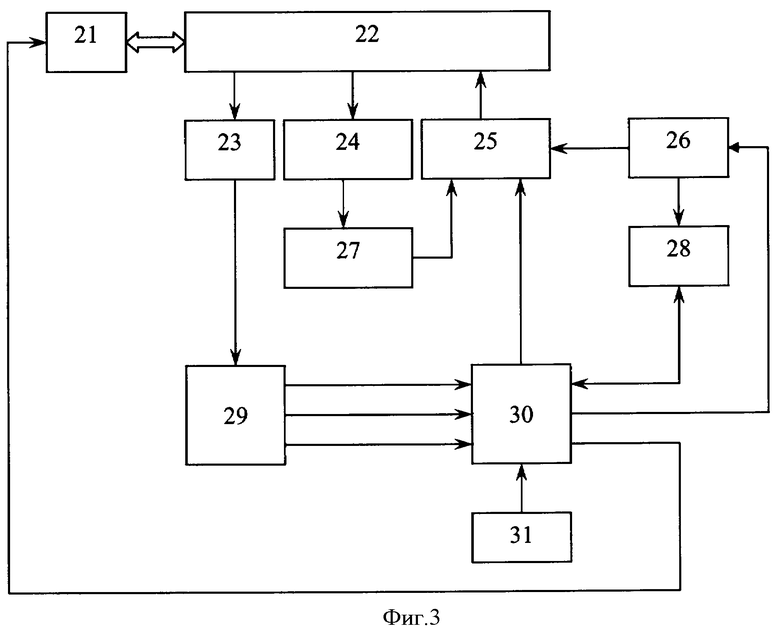
На фигуре 3 представлен пример структурной схемы лазерной аппаратуры подводного объекта, которая позволяет реализовать действия данного способа,
где: 21 - система программного наведения (СПН),
22 - оптическая система (ОС),
23 - информационно-измерительный фотоприемник (ИИФП),
24 - фотоприемник системы точного наведения (ФПСТИ),
25 - устройство точного наведения (УТН) ЛПУ,
26 - лазерное передающее устройство (ЛПУ),
27 - устройство обработки сигналов точного наведения (УОСТН),
28 - измеритель временных интервалов (ИВИ),
29 - система обработки информационных сигналов (СОИС),
30 - вычислительно-управляющая система (ВУС),
31 - измеритель прозрачности воды (ИПВ).
Доставка информации на подводный объект и формирование для него подводного лазерного навигационного поля в заданном районе океана (площадью не менее десяти тысяч квадратных километров) осуществляется всеми спутниками, в зоне видимости которых находится обеспечиваемый район.
На всех спутниках решается задача ориентации лазерной аппаратуры с минутной точностью.
Существующие и проектируемые средства ориентации системы ГЛОНАСС основаны на использовании датчиков Солнца и Земли. Технологический предел точности при этом составляет десятки угловых минут. Повышение точности при этом составляет десятки угловых минут. Повышение точности возможно на основе использования пеленгации навигационных звезд (с помощью астросистемы 3), а также пеленгации (устройство 10) соседних спутников по сигналам лазерного дальномера 8 (или связного передатчика системы 9).
В качестве ориентиров для навигации могут служить наземные лазерные маяки, в этом случае опорное направление определяется пеленгатором 15.
Наземные маяки и «соседние» аппараты группировки могут служить высокоточными источниками информации об его текущей ориентации. Даже если взаимное расположение спутников известно из долгосрочного (грубого) альманаха группировки, возможно решение задачи ориентации с погрешностями, не превышающими десятки угловых секунд.
Для решения задачи уточнения ориентации необходимо выполнение следующих операций.
На основе эфемеридной информации определяется межспутниковый вектор, т.е. рассчитывается направление (азимут и угол места) на «соседний» аппарат относительно связанной со спутником системы координат (обычно ОХ направлена на центр Земли, OY перпендикулярна плоскости орбиты, OZ дополняет систему до правой).
По лазерным излучениям устройства 8 соседнего спутника в направлении ориентирующегося аппарата в устройстве 10 измеряются псевдоазимут и псевдоугол места относительно связанной системы координат, формируемой системой ориентации и стабилизации аппарата (СОС).
На основе сравнения расчетных и измеренных направлений на два «соседних» спутника в устройстве 6 определяются погрешности ориентации СОС, т.е. вычисляются углы Эйлера между расчетным (истинным) и текущим, формируемым по данным СОС, координатными трехгранниками.
Аналогичное решение задачи ориентации с секундной и субсекундной точностью возможно при использовании астроориентиров.
Используя визирование системой 3 двух (и более) разнесенных (например, по азимуту) навигационных звезд, возможно воспроизведение инвариантной к местоположению (аналитической) системы координат, т.е. системы координат с осями, параллельными осям репера, в котором воспроизводится астрономический каталог. Алгоритм определения ориентации аналитического трехгранника - х у z относительно связанных с КА координатных осей (например, с центром масс и осями инерции аппарата) - хс yс zc задается системой уравнений:
где 



 ;
;  ;
;

xac=cosh·cosA
yac=cosh·sinA

Здесь hlAl - высота и азимут l-й навигационной звезды, задаваемые по астрономическому каталогу,
 и
и  - псевдовысота и псевдоазимут l-й звезды, определенные относительно связанной системы координат,
- псевдовысота и псевдоазимут l-й звезды, определенные относительно связанной системы координат,
h и А - высота и азимут l-й звезды, измеряемые астросистемой КА,
 - вектор, характеризующий положение астросистемы на космическом аппарате относительно связанного репера хс ус zc,
- вектор, характеризующий положение астросистемы на космическом аппарате относительно связанного репера хс ус zc,
γac - взаимный крен (угол скручивания) между связанным репером астросистемы,
φ, Ψ, ν - углы Эйлера между аналитическим и связанным трехгранниками.
Потенциальный предел точности аналитической ориентации ограничен неопределенностями параметров навигационных звезд относительно геоцентрического базиса, а также неопределенностями самого геоцентрического базиса (экваториальной системы координат), которые обусловлены нестабильностями вращательного движения Земли и обращения планет вокруг Солнца.
Теоретический предел точности ориентации с использованием принципа экваториальной системы отсчета соответствует уровню 0,1 угл. сек. Известны исследования с целью построения заатмосферных координатных базисов, свободных от недостатков геоцентрических систем координат (программа Hipparcos (США) и др.).
В лазерном комплексе существует столько систем координат, сколько угломерных измерений в него входит. Для воспроизведения угловых измерений в аналитическом репере необходимо обеспечить привязку этих измерений к связанной системе координат.
Аналитические угловые координаты наземных маяков и соседних аппаратов группировки определяются по алгоритму, который задается таблицей.

Через  и
и  обозначены связанные координаты, а через
обозначены связанные координаты, а через
α и β - аналитические угловые координаты.
Наведение на заданный район океана спутниковой аппаратуры 5 осуществляется по программе, формируемой в устройствах 6 и 13, с учетом данных многоспектрального датчика облачности 20.
Если вероятность просвета менее 0,6, - облучение прерывается (под просветом понимается атмосферная трасса с интегральным пропусканием в одну сторону от спутника до поверхности воды не менее 1%).
Программа наведения аппаратуры 5 на заданную область в океане может быть задана на основе соотношений:
 ;
;  ;
;
 ;
;
xai=X0-X0i
yai=Y0-Y0i
zai=Z0-Z0i
где X0 Y0 Z0 - предполагаемые, например, по альманаху группировки, геоцентрические координаты определяющегося КА;
X0i Y0i Z0i - геоцентрические координаты i-го объекта;
akm - компоненты преобразования координат, которые определяются углами поворотов между аналитическим и связанным с КА координатными трехгранниками.
В интересах повышения надежности при внештатных ситуациях функции межспутниковых измерений могут быть предусмотрены и в аппаратуре 5. В этом случае зона ее перенацеливания (т.е. диапазон рабочих углов приводов 18) должна составлять ±90° по каждой координате (т.е. полусферу).
На всех спутниках, участвующих в координатно-информационном обеспечении заданного района, осуществляется уточнение бортовых часов на основе межспутниковых дальномерных измерений (с помощью системы 4).
Технология уточнения частотно-временных поправок (ЧВП) основана на встречных измерениях псевдодальностей между парами космических аппаратов.
Межспутниковые лазерные измерения могут обеспечить компенсацию с наносекундной точностью расхождений между моделируемыми (в виде линейного полинома) значениями ЧВП и их истинными значениями. Эти погрешности, если их не компенсировать, непосредственно входят в ошибки измерений потребителя (ПО).
При проведении измерений с интервалом от 5 до 10 мин может быть гарантирована компенсация любых эволюций бортовых часов и существенно снижены требования к стабильности бортовых эталонов частоты.
Измерения дальности осуществляются в устройстве 8 на основе измерения временных интервалов τ между моментами излучения своих лазерных импульсов и приема сигналов от соседнего спутника.
Информация передается устройством 9 методом относительной времяимпульсной модуляции ОВИМ (ПИМ). При этом каждым лазерным импульсом может передаваться от 18 до 27 бит информации.
Расчетные соотношения для оценки дальности r и сдвига шкал Δt задаются соотношениями:
 ;
;
 ;
;
где τs - задержка, измеренная на спутнике ls.
Межспутниковые лазерные дальномерные измерения позволяют автономно корректировать эфемеридные ошибки координатного обеспечения ПО.
Технология автономной коррекции эфемерид спутников на основе межспутниковых измерений может быть основана на известном методе частичного решения эфемеридной задачи, при котором уточняется положение НКА вдоль орбиты.
Метод реализуется при выполнении двух условий:
а) линия визирования близка к направлению, ортогональному скорости одного из взаимодействующих спутников (реперного);
б) линия визирования близка к направлению скорости другого (оцениваемого) спутника.
В этом случае корректируется только трансверсальная составляющая оцениваемого спутника. По измерениям, полученным в выбранные моменты времени, в устройстве 6 строится полином для поправки трансверсальной составляющей оцениваемого КА, на основании которого поправка рассчитывается в устройстве 13 и закладывается в навигационно-связные лазерные сигналы устройства 16 (ЛПС) системы 5.
Многоканальная лазерная аппаратура потребителя (ПА) в режиме фотоприема по программе сопровождает соответствующие навигационные космические аппараты (НКА) рабочего созвездия. Программа сопровождения формируется из данных альманаха орбитальной группировки, корабельного инерциального комплекса и глубины погружения ПА.
Программа наведения аппаратуры ПА, которая формируется устройствами 30 и 24 на ожидаемое положение КА, задается соотношениями:
 ;
;
 ;
;
 ;
;

 ;
;
 ,
,
где A(t) и µ(t) - топоцентрические азимут и угловая высота КА;
ε, η, ξ - топоцентрические координаты КА (ось  направлена на северный полюс по касательной к меридиану подводного объекта, ось
направлена на северный полюс по касательной к меридиану подводного объекта, ось  - по внешней нормали к местной вертикали ПО, а ось
- по внешней нормали к местной вертикали ПО, а ось  дополняет систему до правой);
дополняет систему до правой);
λ(t), Θ(t) - долгота и широта ожидаемого (неуточненного) положения ПО определяются по данным корабельного автономного навигационного комплекса;
XKA YKA ZKA и  - геоцентрические координаты расчетных местоположений КА и ПО;
- геоцентрические координаты расчетных местоположений КА и ПО;
 - звездное время в среднюю гринвичскую полночь для заданной даты;
- звездное время в среднюю гринвичскую полночь для заданной даты;
ω - угловая скорость вращения Земли.
Допустимая погрешность грубого (программного) наведения подводной аппаратуры (с помощью устройств 22-26) определяется в основном разбросом направлений прихода слабо рассеянной компоненты сигнала спутника, т.к. остальные составляющие этой погрешности малы по сравнению с этим разбросом. Этот разброс обусловлен волнением моря и составляет единицы градусов, потому допустимая погрешность W программного наведения аппаратуры подводной лодки (фигура 3) составляет ±(1-2°).
На ПО в устройствах 23, 24 и 29 регистрируется и декодируется запросный сигнал спутника (например, по измерениям временных интервалов между лазерными импульсами) с целью выявления номера спутника и решения задачи идентификации, затем осуществляются адаптивное наведение (устройства 25-27) на место регистрации наиболее яркого блика подводного светового поля запросного сигнала и излучение устройством 26 ответного кодового сигнала.
Суть адаптивного наведения состоит в асинхронном квазинесмещенном обращении запросного лазерного луча (НОЛ) состоит в регистрации углового положения бликов (координатно-чувствительным приемником 24), образованных при прохождении сигналов навигационного спутника (от устройства 16 - ЛПС) через взволнованную поверхность воды, селекции наиболее ярких из них и излучения в направлениях отселектированных бликов ответного импульсного лазерного сигнала передатчиком 26.
Статистическое описание бликового поля основано на представлении поверхности океана совокупностью астигматических водяных «линз» со случайными размерами и знакопеременной оптической силой. Эти линзы создают систему подводных бликов - действительных и мнимых изображений излучателя (запросчика на спутнике). За счет обратимости путей распространения фотонов ответное излучение после преломления на поверхности воды с большой вероятностью (0,7-0,9) будет направлено на спутник. Требование к быстродействию аппаратуры адаптивного наведения ПО определяется временем «замороженности» взволнованной поверхности океана, которое, в зависимости от типа волнения, составляет от 0,1 до 30 мс. Предельная расходимость лазерного пучка, вышедшего из-под воды в направлении спутника, ограничивается величиной  , где d - диаметр лазерного пучка (d≤10-2 м), F - фокусное расстояние водяной «линзы» (F=5…50 м).
, где d - диаметр лазерного пучка (d≤10-2 м), F - фокусное расстояние водяной «линзы» (F=5…50 м).
Величина ΔΘ=(0,6…6) угл. минут определяет пространственную скрытность ответного излучения. Временная скрытность определяется длительностью τ лазерных импульсов, которая составляет (0,5…5)10-9 c. Общее время свечения пятна (d≤10-2 м) на поверхности океана в течение навигационного сеанса составляет t=N·τ (здесь N - число ответных импульсов лазерного кодово-импульсного сигнала, как правило, N≤100, t≤(0,05…0,5) мкс).
Способов ликвидации условий адаптивного наведения методом НОЛ не существует, т.к. никакими известными средствами нельзя ни отменить действие принципа взаимности в оптике, ни ликвидировать волнение океана.
В отличие от радиотехнических средств с выпускными буксируемыми антенными устройствами (ВБАУ) помеховое подавление адаптивной лазерной аппаратуры ПО практически невозможно, т.к. средства эффективного подавления этой лазерной аппаратуры, реализующей метод НОЛ, должны находиться в пределах диаграммы подводного приемника и излучать помеховые лазерные импульсы, привязанные к сигналам спутника с неприемлемо высокой точностью (т.е. при современном техническом уровне средства помехового подавления лазерных НОЛ-каналов не могут быть созданы).
В момент излучения каждого последнего запросного импульса на КА запускается счетчик дальности устройства 13, на ПО в устройстве 28 фиксируется время между приемом последнего импульса запросного сигнала и моментом излучения первого ответного импульса. Этот (ответный) импульс, поступая на НКА, используется для остановки счетчика дальности.
Задержка между концом излучения каждого запросного сигнала и моментом приема первого ответного импульса передается на ПО в связном режиме (через устройства 16, 22, 23, 29 и 30. Дальность между ПО и КА оценивается в устройстве 30 (ВУС) на ПО по формуле:
 ,
,
где τз - задержка между запросным и ответным импульсом, измеренная на КА,
τa - аппаратурная задержка между приемом запросного импульса и излучением ответного измеряется на ПО,
h - глубина погружения ПО,
α - направление на место регистрации блика относительно подводного (например, топоцентрического) горизонта,
с и св - скорости света в воздухе и морской воде.
Информация о факте приема ответного сигнала может быть передана по скрытным межспутниковым каналам системы 4 на любой НКА группировки и, при необходимости, с помощью системы 5 в любой из наземных, воздушных, орбитальных или подводных центров управления. На основе этой информации может быть выдано задание доставлять в данный район запросные сигналы всеми НКА, у которых он находится в зоне видимости до получения от ПО (или из центра управления) команды на окончание сеанса. По этой информации могут быть запущены процедуры дезинформирования противника, например, созданием с помощью орбитальных лазерных средств системы 5 фоново-сигнальных обстановок, имитирующих сеансы с ПО в ложных районах.
На основе измеренных дальностей до двух и более КА решается дальномерная задача. Известный метод решения включает выполнение следующих операций:
Передачу каждым НКА, с которым установлено взаимодействие, данных высокоточного прогноза своего местоположения и уточненного альманаха группировки.
Расчет местоположения ПО на основе решения системы из п дальномерных уравнений:

 ,
,
где l=1, 2…n-1; n≥3.
Вторичная обработка навигационной информации и оценка точности навигационного определения ПО может быть выполнена на основе традиционных методов. Возможны решения этой системы дальномерных уравнений в конечных и итерационных процедурах. Для анализа точности местоположения используются оценки погрешностей поверхностей (линий) положения, которые находятся непосредственно из ошибок дальномерных измерений через градиенты навигационного поля. Объем (площадь) неопределенности местоположения ПО минимален при расположении НКА рабочего созвездия на ортогональных направлениях (в этом случае, при равноточных измерениях дальности, геометрический фактор К для местоопределения на горизонтальной плоскости минимален 
Квазиавтономное дальномерное уточнение местоположения спутника может осуществляться с помощью существующих наземных квантово-оптических систем. В этом случае используются световозвращатели 14.
Для оперативного наведения на наземные лазерные маяки в системе 5 введен широкоугольный лазерный пеленгатор 19.
Пеленгатор 15 используется для точного определения направлений на наземные маяки и точки выхода ответного излучения ПО из-под воды.
При использовании «наносекундных» лазерных импульсов «зеленого» диапазона волн ошибки дальномерных однократных лазерных измерений между глубоко погруженным ПО и среднеорбитальным НКА составляют единицы метров (и могут быть доведены до десятков сантиметров, например, при работе с глубин в несколько десятков метров через стандартные атмосферу и океанскую воду).
Система, реализующая предлагаемый способ, может обеспечить достижение следующих тактико-технических характеристик информационно-координатного обеспечения:
Высота орбиты КА (системы ГЛОНАСС) - 19100 км.
Глубина погружения ПО при навигационно-связном сеансе - от 0 до 200 м.
Погрешность местоопределения ПО - до десяти метров.
Скорость передачи информации - до 1 кбит/с.
Оперативность связи при многоканальной связи через непрерывную облачность (т.е. передачи сообщений в заданный район океана всеми спутниками рабочего созвездия) - от 5 до 10 с.
Энергопотребление спутниковой аппаратуры:
в течение сеанса связи - от 350 до 380 Вт,
между сеансами связи - около 50 Вт,
в том числе:
лазерной системы информационно-координатного обеспечения (ЛСИКО):
в сеансе - от 300 до 330 Вт,
между сеансами - от 10 до 20 Вт,
межспутниковой лазерной измерительно-связной системы (МЛИСС) - до 50 Вт.
Масса спутниковой лазерной аппаратуры - 80 кг,
в том числе:
ЛСИКО - от 40 до 50 кг,
МЛИСС - от 18 до 20 кг,
астросистемы - до 8 кг.
Технико-экономическое преимущество предлагаемого технического решения состоит в повышении эффективности эксплуатации подводных аппаратов, которое достигается за счет:
- повышения технической устойчивости информационного обеспечения на основе высокой надежности двусторонних лазерных каналов между погруженным подводным аппаратом и спутниками, а также между спутниками и мобильным командным пунктом;
- повышения автономности эфемеридно-временного обеспечения спутников на основе межспутниковых лазерный измерений;
- повышения оперативности доставки команд управления на погруженный подводный аппарат группировкой спутников и надежной передачи информации с подводного аппарата на пункт управления им;
- повышения точности и оперативности координатного обеспечения погруженных подводных объектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Применение триангуляционных методов измерений в системе ГЛОНАСС. | 2015 |
|
RU2669042C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ-ПОТРЕБИТЕЛЕЙ НАВИГАЦИОННОЙ ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2402786C1 |
| СПОСОБ ТРАЕКТОРНОГО КОНТРОЛЯ МНОГОПУНКТНЫМ ИЗМЕРИТЕЛЬНЫМ КОМПЛЕКСОМ МНОГОИМПУЛЬСНЫХ ОРБИТ ВЫВЕДЕНИЯ КОСМИЧЕСКИХ АППАРАТОВ НА ВЫСОКОЭЛЛИПТИЧЕСКИЕ, ГЕОПЕРЕХОДНЫЕ И ГЕОСТАЦИОНАРНЫЕ ОРБИТЫ С ИСПОЛЬЗОВАНИЕМ РАЗГОННЫХ БЛОКОВ | 2024 |
|
RU2834499C1 |
| Способ навигационного контроля орбит выведения космических аппаратов и система для его реализации | 2021 |
|
RU2759173C1 |
| Способ управления полетом низкоорбитального космического аппарата через навигационные космические аппараты системы ГЛОНАСС с применением резервного канала передачи с кодовым разделением командно-программной информации | 2022 |
|
RU2800530C1 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА | 2015 |
|
RU2580827C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ПАРАМЕТРОВ НАВИГАЦИОННЫХ СПУТНИКОВ С КОМПЕНСАЦИЕЙ ПОГРЕШНОСТЕЙ НАВИГАЦИОННОГО ПРИЕМНИКА | 2015 |
|
RU2638411C2 |
| СПОСОБ КОСМИЧЕСКОЙ СВЯЗИ | 2012 |
|
RU2549832C2 |
| СПОСОБ ИДЕНТИФИКАЦИИ ПАРАМЕТРОВ НАВИГАЦИОННЫХ СПУТНИКОВ | 2015 |
|
RU2587666C1 |
| Способ навигации и позиционирования подводных объектов в глубоководном канале на больших дальностях и система для его осуществления | 2018 |
|
RU2674404C1 |
Заявленное изобретение относится к области управления и навигации подводных объектов. Сущность изобретения заключается в комплексном использовании лазерных каналов межспутниковых измерений и связи, передачи сигналов со спутников на погруженный подводный объект (ПО) и обратно, а также в разработке методов адаптации этих каналов к влиянию метеофакторов и волнения моря. Предлагаемое изобретение может быть использовано для решения ключевой проблемы подводного приема сигналов управления и навигации подводных объектов (подводных аппаратов), состоящей в повышении эффективности их эксплуатации при работе на шельфе и в открытых районах Мирового океана без подъема на поверхность. Достигаемый технический результат заключается в обеспечении оперативности управления подводными объектами при одновременном удовлетворении жестких требований к их координатному обеспечению в ходе выполнения специальных работ. 3 ил.
Способ координатно-информационного обеспечения подводных объектов, заключающийся в том, что передают лазерные навигационно-связные сигналы с борта космического аппарата, отличающийся тем, что лазерные навигационно-связные сигналы передают в океан в виде запросных сигналов с борта трех и более космических аппаратов, представляющих собой спутники, детектируют и декодируют передаваемые сигналы на подводном объекте, по декодированным сигналам определяют номера спутников и идентифицируют их, измеряют псевдодальности между подводным объектом и соответствующими спутниками, определяют координаты подводного объекта и поправку для судовой шкалы времени относительно системного времени космической навигационной системы с учетом измеренных псевдодальностей, кроме того, на подводном объекте регистрируют угловое положение бликов, образованных при прохождении передаваемых запросных лазерных сигналов спутников через взволнованную поверхность воды, селектируют наиболее яркие из них, излучают в направлении отселектированных бликов ответные лазерные сигналы, фиксируют время между моментом приема последнего запросного сигнала и моментом излучения первого ответного сигнала, на спутниках орбитальной группировки на основе анализа облачности излучают сигналы через просветы в облаках, измеряют временной интервал между моментом излучения последних запросных сигналов и первым ответным сигналом, передают результаты измерений, вводя их в кадр навигационного сигнала, в направлении прихода ответного сигнала, принимают и декодируют этот сигнал на подводном объекте и определяют истинную дальность между соответствующим спутником и подводным объектом с учетом измеренных задержек сигнала, глубины погружения подводного объекта и направления излучения ответного сигнала подводного объекта, определяют временную поправку судовой шкалы времени подводного объекта относительно спутниковых часов на основе сравнения псевдо- и истинной дальностей, на спутниках излучают привязанные к своей бортовой шкале времени импульсные лазерные сигналы в направлениях нескольких спутников в своей орбитальной плоскости и в направлении нескольких спутников в соседних орбитальных плоскостях, измеряют межспутниковые дальности и сдвиги бортовых шкал времени на основе суммарно-разностных соотношений временных интервалов между моментами излучения собственных импульсов и приемом импульсных лазерных сигналов от соседних спутников, привязанных к соответствующим моментам времени относительно бортовых шкал, определяют поправки радиальных составляющих эфемерид на основе межспутниковых дальностей, вводят эти поправки в кадры запросных сигналов, излучаемых в направлении обслуживаемого района Мирового океана, декодированную информацию, извлекаемую из ответных сигналов подводного объекта, закладывают в формат межспутникового лазерного сигнала и передают через цепочку спутников в заданный район, в котором расположен наземный, надводный, подводный или воздушный центр управления действиями подводных объектов.
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2152056C1 |
| СПОСОБ ПЕРЕДАЧИ ДАННЫХ И СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 1999 |
|
RU2232473C2 |
| СИСТЕМА ПОДВОДНОЙ ЭЛЕКТРОМАГНИТНОЙ СВЯЗИ | 2001 |
|
RU2218665C2 |
| Упаковочный деревянный ящик | 1944 |
|
SU66134A1 |
| US 2007165489 А1, 19.07.2007 | |||
| WO 2006001849 А2, 05.01.2006. | |||

