Изобретение относится к калибровочной системе для калибровки, по меньшей мере, одного устройства для измерения расстояния, а также к способу калибровки, базирующемуся на этой калибровочной системе.
В технике автоматизации, в частности, в технике автоматизации процессов, часто используют полевые устройства, которые служат для распознавания переменных величин процесса и/или влияния на них. Для распознавания переменных величин процесса служат чувствительные элементы, которые встроены, например, в приборы для измерения уровня наполнения, расходомеры, окислительно-восстановительного потенциала, проводимости и т.п., которые распознают соответствующие переменные величины процесса применительно к уровню заполнения, расходу, давлению, температуре, водородному показателю, окислительно-восстановительному потенциалу или проводимости. Для влияния на переменные величины процесса служат исполнительные элементы, такие как, например, клапаны или насосы, с помощью которых можно изменять расходный объем жидкости на участке трубопровода или уровень наполнения резервуара. Принципиально полевыми устройствами называют все те приборы, которые используют в связи с процессом и которые предоставляют или вырабатывают важную для процесса информацию. Во взаимосвязи с изобретением под полевыми устройствами понимают также удаленные устройства ввода/вывода, беспроводные адаптеры или в целом электронные компоненты, которые расположены на полевом уровне. Множество таких полевых устройств изготавливает и продает фирма Endres+Hauser.
Для измерения уровня наполнения используют бесконтактные способы измерения, поскольку они являются надежными и не требующими больших затрат на техническое обслуживание. Следующее преимущество заключается в способности непрерывного измерения. В данном случае успешно используют специально базирующиеся на радиолокационном принципе способы измерения, которые работают по принципу времени прохождения импульса или FMCW-принципу (принцип непрерывного частотно-модулированного излучения). При этом способе измерения микроволны периодически излучают в направлении загружаемого материала с заранее заданной частотой повторения, например, в диапазоне частот от 1 до 10 МГц со средними частотами в ГГц-диапазоне. За счет этого определяют расстояние между устройством для измерения уровня наполнения и поверхностью загружаемого материала. На основании его может быть рассчитан уровень наполнения.
Для калибровки или эталонирования устройств для измерения расстояния, в частности, первоначально упомянутых устройств для измерения уровня наполнения, используют измерительные отрезки, длина которых соответствует, по меньшей мере диапазону измерения устройства для измерения расстояния. В случае измерения уровня наполнения максимальный диапазон измерения соответствует максимальному уровню наполнения вплоть до 40 м.
На соответствующем измерительном отрезке расположен перемещаемый отражатель. Подлежащее калибровке устройство для измерения расстояния монтируют на первом конце измерительного отрезка. В завершение для осуществления калибровки в направлении отражателя излучают сигнал измерения и принимают отраженный сигнал измерения. Отраженный сигнал измерения уравнивают до соответствующей величины (Xi) расстояния, которая была определена с помощью калиброванной нормали. Стандартно для определения линейности задействуют несколько величин (Хi-Xn) расстояния.
В простейшем случае при калиброванной нормали речь идет о калиброванной измерительной ленте. Из соображений точности используют, однако, как правило, оптические способы, такие как интерферометрия, за счет чего точность калиброванной нормали, по меньшей мере, на порядок выше потребной точности подлежащего калибровке устройства для измерения расстояния.
Для случая, когда оптический способ используют в качестве калиброванной нормали, определение величины (Xi) расстояния с помощью соответствующего оптического устройства не может быть осуществлено непосредственно, так как оно не может располагаться на одном и том же месте, что и подлежащее калибровке устройство для измерения расстояния. Поэтому оптическое устройство позиционируют не в начале измерительного отрезка, как устройство для измерения расстояния, а на противолежащем конце. Базирующаяся на этом принципе конструкция описана в публикации
DE 10 2012 104 926 А1.
При такой конфигурации величина расстояния складывается из разности между расстояниями от оптического устройства до отражателя (Mi) и дистанции (R) до отражателя, причем в случае дистанции (R) до отражателя речь идет о расстоянии от оптического устройства до устройства для измерения расстояния:
Xi = R – Mi
Определение эталонной дистанции (R) возможно с помощью различных способов. Во-первых, это определение может быть осуществлено также с помощью калиброванной измерительной ленты. При этом, однако, точность измерения измерительного участка была бы ограничена опять точностью измерительной ленты.
В случае измерительного участка, который показан в заявке DE 10 2012 104 926 А1, возможно определение оптическим устройством дополнительно эталонной дистанции (R). Это осуществимо, конечно, только при условии, что отражатель можно откидывать таким образом, что в откинутом состоянии он находится вне оптического пути между оптическим устройством и устройством для измерения расстояния.
Недостаток этого заключается в том, что такой механизм откидывания едва ли применим на практике, поскольку, по меньшей мере, в случае устройств для измерения уровня наполнения измерительный отрезок реализован, как правило, в виде трубы уравнительного резервуара. По этой причине отражатель во время калибровки является в этом случае недоступным внутри трубы уравнительного резервуара. В соответствии с этим невозможно также повторное (по мере необходимости даже многократное) измерение эталонной дистанции (R) во время калибровки. Именно это, однако, оказывает негативное влияние на точность калибровки, которая длится в течение нескольких часов, так как величина эталонной дистанции (R) может изменяться в ходе калибровки вследствие колебаний температуры.
Поэтому в основу изобретения положена задача указания калибровочной системы и соответствующего способа калибровки, по меньшей мере, одного устройства для измерения расстояния, с помощью которого может быть достигнута улучшенная калибровка.
Изобретение решает эту задачу с помощью калибровочной системы для калибровки, по меньшей мере, одного устройства для измерения расстояния. Для этого она содержит:
- по меньшей мере, один измерительный отрезок, на котором может быть смонтировано, по меньшей мере, одно устройство для измерения расстояния;
- по меньшей мере, один монтируемый с возможностью перемещения на, по меньшей мере, одном измерительном отрезке отражатель для отражения сигнала (Di) измерения, излученного, по меньшей мере, одним устройством для измерения расстояния, и
- лазерный трекер.
Калибровочная система отличается тем, что предусмотрено зеркальное устройство, с помощью которого лазерный трекер может определять, по меньшей мере, одно расстояние (Mi) до, по меньшей мере, одного отражателя и, по меньшей мере, одну эталонную дистанцию (Ri) до, по меньшей мере, одного устройства для определения расстояния.
С помощью соответствующей изобретению калибровочной системы обеспечивается возможность определения как расстояния (Mi) до отражателя, так и дистанции (Ri) с помощью одного единственного измерительного устройства без необходимости исполнения отражателя откидываемым. За счет этого предотвращают возникновение систематического отклонения величин измерения при определении расстояния (Mi) и эталонной дистанции (Ri) с помощью различных измерительных устройств. За счет этого возможно также многократное распознавание эталонной дистанции (Ri) во время самой калибровки.
Предпосылка к определению расстояния (Mi) или эталонной дистанции (Ri) с помощью лазерного трекера заключается в размещении на отражателе и на устройстве для определения расстояния соответственно световозвращающего отражателя и соответствующей оптики для отражения лазерного луча. Соответствующие лазерные трекеры, которые распознают соответствующий световозвращающий отражатель, осуществляют измерение абсолютной дистанции и могут сопровождать световозвращающий отражатель при движении, изготавливает и продает под наименованием продукта “Leica Absolute Tracker AT 40X”, например, фирма Leica Geosystem.
Главное преимущество соответствующей изобретению калибровочной системы вытекает из возможности условно одновременной калибровки нескольких устройств для измерения расстояния. В этом случае калибровочная система должна быть расширена таким образом, что для калибровки нескольких устройств для определения расстояния она содержит несколько измерительных отрезков с соответственно одним отражателем. При этом расположение зеркал выбрано таким, что лазерный трекер в состоянии определять на каждом измерительном отрезке расстояние (Mi) до соответствующего отражателя и эталонную дистанцию (Ri) от соответствующего устройства для измерения расстояния.
За счет использования лазерного трекера в комбинации с зеркальным устройством в рамках изобретения возникает следующее преимущество в отношении возможной автоматизации калибровки: автоматизация может быть достигнута за счет соответствующего программирования лазерного трекера, с помощью которого лазерный трекер в случае необходимости может самостоятельно осуществлять грубое выравнивание, необходимое для распознавания соответствующего отражателя.
Дальнейшая автоматизация калибровки может быть достигнута за счет того, что, по меньшей мере, один измерительный участок дополнительно содержит регулировочное устройство для перемещения, по меньшей мере, одного отражателя. При этом калибровка могла бы быть осуществлена с помощью вышеприданного узла, предусмотренного для управления работой устройства для измерения расстояния, лазерного трекера и/или регулировочного устройства.
Если в случае подлежащего калибровке устройства речь идет об устройстве для измерения уровня наполнения, улучшенная калибровка может быть достигнута при условии, что в случае, по меньшей мере, одного измерительного отрезка речь идет о трубе уравнительного резервуара. Это соответствует, как правило, будущим условиям измерения и в соответствии с этим обеспечивает калибровку, весьма приближенную к случаю использования. В таких случаях обычным является то, что, по меньшей мере, одна труба уравнительного резервуара имеет номинальный внутренний диаметр между DN 100 и DN 300.
Кроме того, положенную в основу изобретения задачу решают с помощью способа калибровки, по меньшей мере, одного устройства для измерения расстояния с помощью описанной выше калибровочной системы. В соответствии с этим способ содержит следующие технологические этапы:
- с помощью лазерного трекера определяют эталонную дистанцию (Ri);
- с помощью лазерного трекера определяют расстояние (Mi);
- на основании эталонной дистанции (Ri) и расстояния (Mi) определяют измерительную дистанцию (Xi);
- выданный устройством для измерения расстояния сигнал (Di) измерения после отражения отражателем принимают при помощи устройства для измерения расстояния и
- на основании отраженного сигнала (Di) измерения и измерительной дистанции (Xi) производят калибровку устройства для измерения расстояния,
причем калибровку устройства для измерения расстояния производят при перемещении отражателя вдоль измерительного участка при различных измерительных дистанциях (X1-Xn).
С помощью соответствующей изобретению калибровочной системы возможно также измерение эталонной дистанции (R1…, Rn) при перемещении отражателя вдоль измерительного участка при различных измерительных дистанциях (X1-Xn). Таким образом может быть исключена проблема, выраженная в возможности изменения величины эталонной дистанции (R) вследствие колебаний температуры в ходе калибровки.
Применительно к этим влияниям окружающей среды следующего улучшения калибровки достигают в случае, если при определении расстояния (Mi), эталонной дистанции (Ri) и/или отраженного сигнала (Di) измерения одновременно учитывают температуру, давление окружающего воздуха и/или влажность воздуха. Для этого необходимо распознавание соответствующих влияний окружающей среды и выполнение основанных на них корректировок расстояния (Mi), эталонной дистанции (Ri) и/или отраженного сигнала (Di) измерения. В зависимости от типа лазерного трекера это уже присутствует в форме заранее интегрированной функции.
В случае, если соответствующая изобретению калибровочная система для условно одновременной калибровки нескольких устройств для измерения расстояния содержит множество измерительных отрезков, описанный выше способ выполняют на каждом из этих измерительных отрезков. В соответствии с этим на каждом отдельном измерительном отрезке
- с помощью лазерного трекера определяют эталонную дистанцию (Ri),
- с помощью лазерного трекера определяют расстояние (Mi),
- на основании эталонной дистанции (Ri) и на основании расстояния (Mi) определяют измерительную дистанцию (Xi),
- выданный устройством для измерения расстояния сигнал (Di) измерения принимают после отражения отражателем с помощью устройства для измерения расстояния и
- на основании отраженного сигнала (Di) измерения и измерительной дистанции (Xi) производят калибровку устройства для измерения расстояния.
Изобретение пояснено более подробно на основании последующих фигур. Фигуры показывают:
Фиг. 1 показывает схематическое изображение соответствующей изобретению калибровочной системы,
Фиг. 2 показывает калибровочную систему с несколькими измерительными отрезками и
Фиг. 3 показывает расположение нескольких труб уравнительного резервуара в качестве измерительных отрезков.
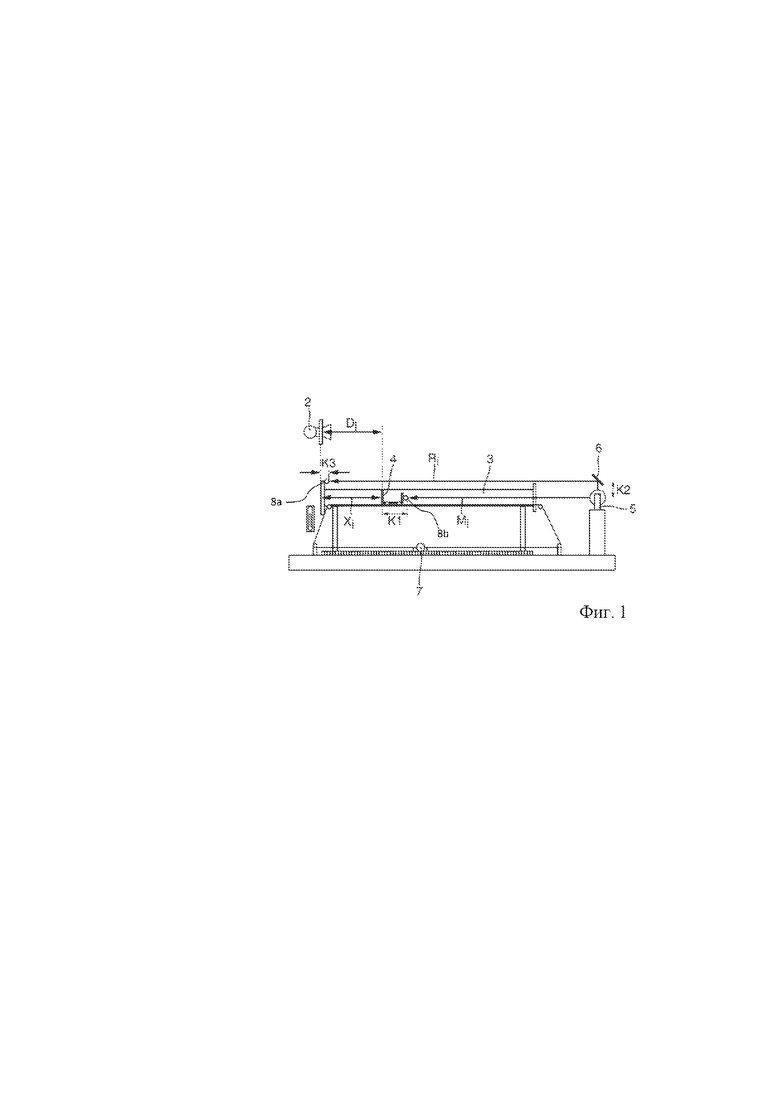
На фиг. 1 показана соответствующая изобретению калибровочная система 1 для калибровки устройства 2 для измерения уровня наполнения. Для этого калибровочная система 1 содержит выполненный в виде трубы уравнительного резервуара измерительный участок 3. Устройство 2 для измерения уровня наполнения смонтировано на первом конце трубы 3 уравнительного резервуара, в результате чего оно излучает сигналы (Di) измерения в направлении расположенных в трубе 3 уравнительного резервуара отражателей 4 и может принимать их после отражения. Отражатель 4 позиционирован внутри трубы 3 уравнительного резервуара с возможностью перемещения. За счет этого в целях калибровки можно изменять расстояние Xi между устройством 2 для измерения уровня наполнения и отражателем 4. При этом с помощью регулировочного устройства 7, которое через гибкую тягу соединено с отражателем 4, осуществляют управление позиционированием. Для упрощенного представления устройство 2 для измерения уровня наполнения изображено на фиг. 1 смещенным относительно трубы 3 уравнительного резервуара.
На противолежащем конце трубы 3 уравнительного резервуара расположен лазерный трекер 5. Для того, чтобы лазерный трекер 5 мог определять дистанцию Mi до отражателя или эталонную дистанцию Ri до устройства 2 для измерения уровня наполнения, на первом конце трубы 3 уравнительного резервуара и на отражателе 4 расположен соответственно световозвращающий отражатель 8а, 8b. Для обеспечения возможности определения в соответствии с изобретением как эталонной дистанции Ri, так и дистанции Mi до отражателя 4 необходимо зеркальное устройство 6. В показанном на фиг. 1 варианте исполнения калибровочной системы 1 зеркальное устройство 6 состоит исключительно из зеркала, через которое лазерный луч лазерного трекера 5 может проходить к расположенному на устройстве для измерения уровня наполнения световозвращающему отражателю 8а. Альтернативно лазерный трекер 5 и зеркальное устройство 6 в смысле изобретения могли быть расположены также таким образом, что расположенный на устройстве 2 для измерения уровня наполнения световозвращающий отражатель 8а расположен непосредственно на оптическом пути лазерного трекера 5, а световозвращающим отражателем 8b отражателя 4 можно управлять с помощью зеркального устройства 6. Однако, независимо от этого предпочтительно, если лазерный трекер 5 запрограммирован таким образом, что он может самостоятельно управлять обоими световозвращающими отражателями 8а, 8b или зеркальным устройством 6.
За счет определения дистанции Mi до отражателя 4, а также эталонной дистанции Ri с помощью лазерного трекера 5 на основании этих дистанций Ri, Mi может быть рассчитано расстояние Xi между устройством 2 для определения уровня наполнения и отражателем 4 и на основании их произведена калибровка:
Xi = Ri – Mi – K
Это может быть осуществлено, например, в вышестоящем блоке, который обрабатывает данные устройства 2 для измерения уровня наполнения, лазерного трекера 5 и/или регулировочного устройства 7. При этом при расчете необходимо учитывать корректировочный коэффициент К. Он складывается из суммы отдельных корректировок K1, К2, К3, которая образуется вследствие размещенного расположения световозвращающих отражателей 8a, 8b или продолжения пути луча через зеркальное устройство 6.
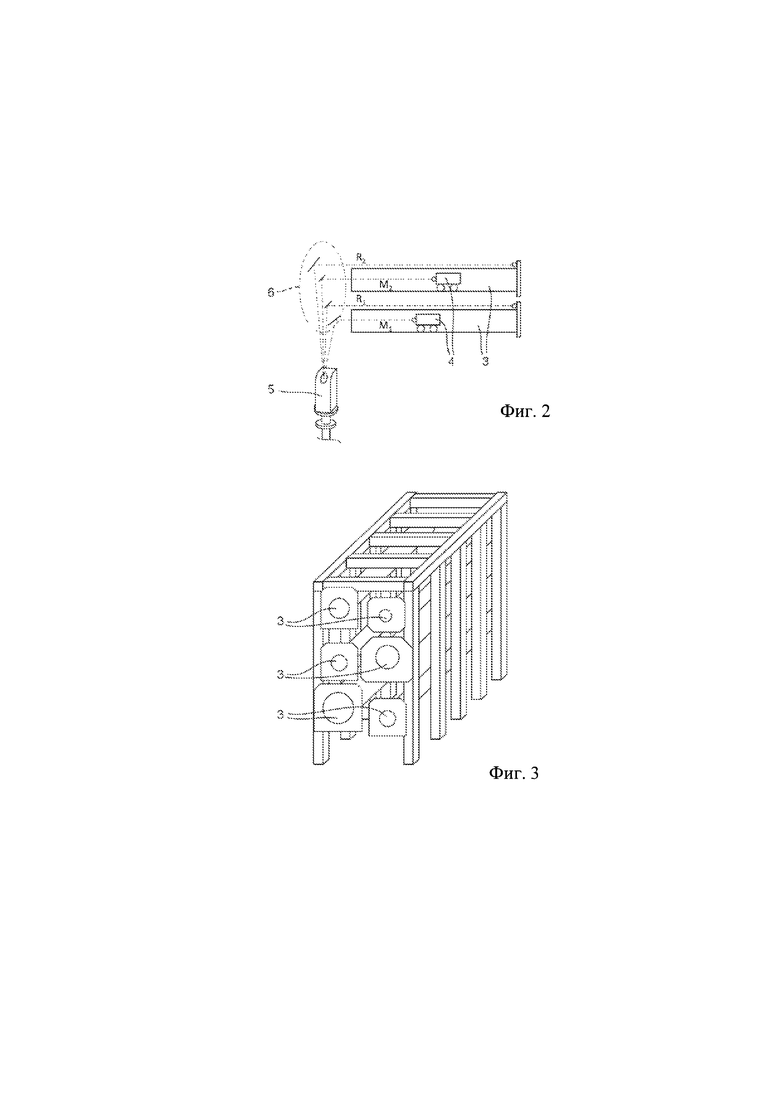
На фиг. 2 показано, что соответствующая изобретению калибровочная система 1 может содержать не только один измерительный отрезок 3, но также и множество измерительных отрезков 3. В этом случае зеркальное устройство 6 должно быть оснащено зеркалами таким образом, что лазерный трекер 5 может определять для каждого отдельного измерительного отрезка 3 дистанцию М1, М2 до соответствующего отражателя 4, а также соответствующую эталонную дистанцию R1, R2. Из этого вытекает главное преимущество соответствующей изобретению калибровочной системы 1, а именно возможность условно одновременной калибровки нескольких устройств 2 для измерения расстояния и, тем самым, достижение решающей экономии времени. Простоты ради подлежащие калибровке устройства 2 для измерения расстояния на фиг. 2 не изображены.
Как следует из фиг. 3, нет необходимости в том, чтобы в случае нескольких измерительных отрезков 3 они располагались исключительно один над другим или рядом друг с другом. В показанном в противоположность фиг. 3 изображении измерительные отрезки не должны быть также расположены параллельно друг другу. На изображении в случае измерительных отрезков 3 речь идет об имеющих различные диаметры трубах уравнительного резервуара. Это позволяет, в частности, производить условно одновременную калибровку нескольких устройств 2 для измерения уровня наполнения, которые вследствие различных окружающих условий при измерении требуют калибровки на различных диаметрах труб уравнительного резервуара.
Перечень ссылочных обозначений
1 Калибровочная система
2 Устройство для измерения расстояния
3 Измерительный отрезок
4 Отражатель
5 Лазерный трекер
6 Зеркальное устройство
7 Регулировочное устройство
8а,b Световозвращающие отражатели
Di Сигнал измерения
Ri Эталонная дистанция
Xi Измерительная дистанция
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ДЛЯ ПОВЕРКИ И КАЛИБРОВКИ ЦИФРОВЫХ НИВЕЛИРОВ И ШТРИХКОДОВЫХ РЕЕК | 2009 |
|
RU2419766C1 |
| ШИРОКОДИАПАЗОННЫЙ КОМПАРАТОР ДЛЯ ПОВЕРКИ И КАЛИБРОВКИ КООРДИНАТНЫХ СРЕДСТВ ИЗМЕРЕНИЙ | 2009 |
|
RU2401985C1 |
| Способ калибровки мобильных 3D-координатных средств измерений и устройство для его реализации | 2018 |
|
RU2710900C1 |
| УСТРОЙСТВО ДЛЯ КАЛИБРОВКИ РОВНИТЕЛЯ | 2021 |
|
RU2830118C2 |
| Установка для поверки и калибровки уровнемеров | 2021 |
|
RU2772553C1 |
| ПОВЕРОЧНЫЙ КОМПЛЕКС КООРДИНАТНЫХ ПРИБОРОВ И ИЗМЕРИТЕЛЬНЫХ СИСТЕМ | 2012 |
|
RU2494346C1 |
| Способ калибровки контактного устройства | 1982 |
|
SU1084703A1 |
| УСТРОЙСТВО КАЛИБРОВКИ НАЗЕМНЫХ РАДИОЛОКАЦИОННЫХ ИЗМЕРИТЕЛЬНЫХ КОМПЛЕКСОВ ПОД МАЛЫМИ УГЛАМИ МЕСТА | 2004 |
|
RU2278396C2 |
| ЛАЗЕРНЫЙ ТОЛЩИНОМЕР И СПОСОБ ЕГО КАЛИБРОВКИ | 2013 |
|
RU2542633C1 |
| Способ калибровки кинематических параметров многостепенных манипуляторов | 2019 |
|
RU2719207C1 |
Группа изобретений относится к системе калибровки для измерения расстояния. Калибровочная система для калибровки устройства для измерения расстояния содержит по меньшей мере один измерительный отрезок, на котором может быть смонтировано по меньшей мере одно для измерения расстояния, по меньшей мере один монтируемый с возможностью перемещения на по меньшей мере одном измерительном отрезке отражатель для отражения сигнала (Di) измерения, выданного по меньшей мере одним устройством для измерения расстояния, и лазерный трекер. При этом калибровочная система содержит зеркальное устройство, посредством которого с помощью лазерного трекера можно определять по меньшей мере одно расстояние (М) до по меньшей мере одного отражателя и по меньшей мере одну эталонную дистанцию (Ri) до по меньшей мере одного устройства для измерения расстояния. Технический результат – повышение точности калибровки. 2 н. и 8 з.п. ф-лы, 3 ил.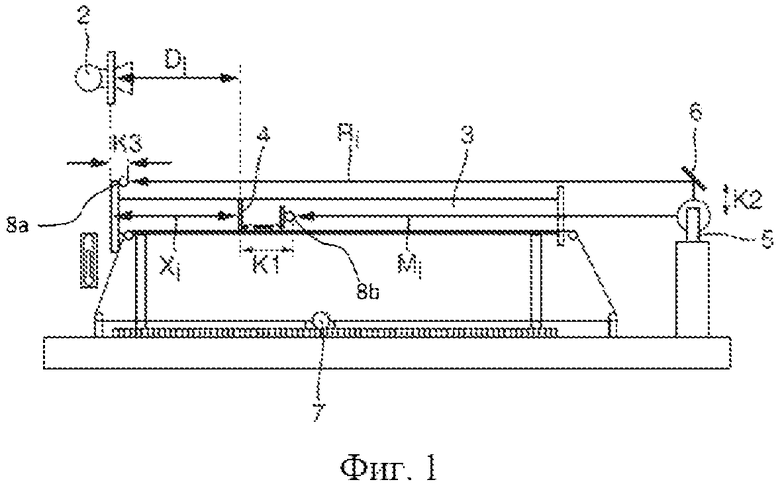
1. Калибровочная система (1) для калибровки по меньшей мере одного устройства (2) для измерения расстояния, содержащая:
- по меньшей мере один измерительный отрезок (3), на котором может быть смонтировано по меньшей мере одно устройство (2) для измерения расстояния,
- по меньшей мере один монтируемый с возможностью перемещения на по меньшей мере одном измерительном отрезке отражатель (4) для отражения сигнала (Di) измерения, выданного по меньшей мере одним устройством (2) для измерения расстояния, и
- лазерный трекер (5).
отличающаяся тем, что
предусмотрено зеркальное устройство (6), посредством которого с помощью лазерного трекера (5) можно определять по меньшей мере одно расстояние (М) до по меньшей мере одного отражателя (4) и по меньшей мере одну эталонную дистанцию (Ri) до по меньшей мере одного устройства (2) для измерения расстояния.
2. Калибровочная система по п. 1,
отличающаяся тем, что
калибровочная система (1) для калибровки нескольких устройств (2) для измерения расстояния содержит множество измерительных отрезков (3) с соответственно одним отражателем (4), причем зеркальное устройство (6) выполнено таким образом, что с помощью лазерного трекера (5) возможно определение на каждом измерительном отрезке (3) расстояния (Mi) до соответствующего отражателя (4) и эталонной дистанции (Ri) до соответствующего устройства (2) для измерения расстояния.
3. Калибровочная система по п. 1 или 2,
отличающаяся тем, что
по меньшей мере один измерительный отрезок содержит регулировочное устройство (7) для перемещения по меньшей мере одного отражателя (4).
4. Калибровочная система по пп. 1, 2 или 3,
отличающаяся тем, что
предусмотрен вышестоящий блок для управления устройством (2) для измерения расстояния, лазерного трекера (5) и/или регулировочного устройства (7).
5. Калибровочная система по любому из пп. 1-4,
отличающаяся тем, что
в случае по меньшей мере одного измерительного отрезка (3) речь идет о трубе уравнительного резервуара.
6. Калибровочная система по п. 5,
отличающаяся тем, что
по меньшей мере одна труба (3) уравнительного резервуара имеет номинальный внутренней диаметр между DN 100 и DN 300.
7. Способ калибровки по меньшей мере одного устройства (2) для измерения расстояния с помощью калибровочной системы согласно любому из пп. 1-6, при котором осуществляют следующие технологические этапы:
- с помощью лазерного трекера (5) определяют эталонную дистанцию (Ri),
- с помощью лазерного трекера (5) определяют расстояние (Mi),
- на основании эталонной дистанции (Ri) и расстояния (Mi) определяют измерительную дистанцию (Xi),
- выданный устройством (2) для измерения расстояния сигнал (Di) измерения после отражения от отражателя (4) принимают с помощью устройства (2) для измерения расстояния, и
- на основании отраженного сигнала (Di) измерения и измерительной дистанции (Xi) производят калибровку устройства для измерения расстояния, причем калибровку устройства (2) для измерения расстояния осуществляют с перемещением отражателя (4) вдоль измерительного отрезка (3) при различных измерительных дистанциях (X1-Xn).
8. Способ по п. 7, при котором эталонную дистанцию (R1…Rn) определяют с перемещением отражателя (4) вдоль измерительного отрезка (3) при различных измерительных дистанциях (Х1-Xn).
9. Способ по п. 7 или 8, при котором при определении расстояния (Mi), эталонной дистанции (Ri) и/или отраженного сигнала (Di) измерения одновременно учитывают температуру, давление окружающего воздуха и/или влажность воздуха.
10. Способ по любому из пп. 7-9, при котором для случая, когда калибровочная система содержит множество измерительных отрезков (3), на каждом из этих измерительных отрезков
- с помощью лазерного трекера (5) определяют эталонную дистанцию (Ri),
- с помощью лазерного трекера (5) определяют расстояние (Mi),
- на основании эталонной дистанции (Ri) и расстояния (Mi) определяют измерительную дистанцию (Xi),
- выданный устройством (2) для измерения расстояния сигнал (Di) измерения после отражения отражателем (4) принимают с помощью устройства (2) для измерения расстояния, и
- на основании отраженного сигнала (Di) измерения и измерительной дистанции (Xi) производят калибровку устройства для измерения расстояния.
| WO 2015079019 A1, 04.06.2015 | |||
| JP 11271448 A, 08.10.1999 | |||
| JP 4315327 B2, 19.08.2009 | |||
| СЕЯЛКА С ВЫСОКОСКОРОСТНЫМ УСТРОЙСТВОМ ПОДАЧИ СЕМЯН | 2018 |
|
RU2746807C1 |

