Изобретение относится к области машиностроения, преимущественно к тяговым системам машин различного назначения на основе электрических машин с силовыми полупроводниковыми преобразователями.
Известна коллекторная электрическая машина, конструктивно объединенная с блоком управления (контроллером, преобразователем электрической энергии) этого электродвигателя (DE 4016663 A1, 20.12.1990; FR 2650131 A1, 25.01.1991).
Она имеет пониженную надежность и небольшой ресурс работы, что обусловлено наличием у электрической машины коллекторного узла.
Известен также мехатронный модульный агрегат, содержащий корпус, в котором расположены электрическая машина и элементы силовой электроники. Корпус выполнен в виде двух герметично соединенных отсеков, в одном из которых расположена электрическая машина, а в другом - элементы силовой электроники. Между отсеками образована полость, сообщающаяся с системой охлаждения агрегата (RU 128036 U1, 21.01.2013).
Недостатком этого мехатронного агрегата являются его повышенные габаритные размеры, что обусловлено наличием двух различных охлаждаемых герметичных отсеков, соединенных между собой.
Кроме того известен тяговый мехатронный модуль, реализованный в виде электрической машины со встроенным силовым преобразователем. Он содержит ротор и статор электрической машины, силовые транзисторные модули с драйверами, датчики тока фазных обмоток, размещенные над силовыми транзисторными модулями, а также низкочастотный и высокочастотный входные емкостные фильтры, каждый их которых расположен на отдельной печатной плате. Силовые транзисторные модули с датчиками тока и драйверами, а также печатные платы емкостных фильтров, размещены последовательно вдоль оси электрической машины (RU 2330371 C1, 27.07.2008).
Недостатком этого устройства являются повышенные габаритные размеры, что обусловлено применением трехслойной конструкции преобразователя (последовательным расположением вдоль оси электрической машины печатных плат емкостных фильтров и силовых транзисторных модулей), а также применением крупногабаритных датчиков тока, расположенных над транзисторными модулями.
Наиболее близким к предложенному техническому решению является электрическая машина, содержащая корпус или станину, статор с фазными обмотками, ротор, подшипниковые щиты и встроенный преобразователь, в состав которого входят силовые транзисторные модули, их драйверы, входной емкостный фильтр, контроллер и датчики положения ротора, тока и температуры фазных обмоток. Силовые транзисторные модули непосредственно, через диоды или датчики тока соединены с фазными обмотками и выводами входного емкостного фильтра. Дополнительно, в зависимости от варианта реализации этой электрической машины, силовые транзисторные модули и входной емкостный фильтр расположены на одной стенке отсека преобразователя, размеры этого отсека соответствующие наиболее крупногабаритной составной части преобразователя, а драйверы размещены над силовыми транзисторными модулями (RU 2656866 C1, 07.06.2018).
Эта электрическая машина имеет повышенные габаритные размеры, что обусловлено размещением составных частей ее встроенного преобразователя в нескольких уровнях во всем объеме его отсека, в том числе размещение драйверов над силовыми транзисторными модулями, а также отсутствием реализации технических решений, направленных на минимизацию общего объема составных частей преобразователя и общей площади, необходимой для их размещения.
К недостатком этой электрической машины является также пониженное значение ее крутящего момента, что обусловлено малым числом фаз (три) и невозможностью включения одновременно более одной фазы.
Задачей изобретения является уменьшение осевой длины индукторной электрической машины со встроенным преобразователем без увеличения ее поперечных размеров при одновременном повышении ее крутящего момента.
В индукторной электрической машине со встроенным преобразователем указанный технический результат достигается за счет того, что она содержит статор с полюсами и фазными обмотками, размещенными на зубцах магнитопровода статора в его пазах, безобмоточный ротор, на валу которого закреплен зубчатый магнитопровод, подшипниковые щиты и преобразователь, в состав которого входят силовые транзисторные модули, их драйверы, емкостный фильтр в цепи питания, контроллер, осуществляющий прием сигналов управления электрической машиной и формирования сигналов управления драйверами, по меньшей мере один датчик тока и/или положения ротора, соединенный с контроллером, при этом статор имеет четное число фаз 2N, где N≥2, последовательно с обмотками каждой фазы включен диод, а фазные обмотки через разнонаправленно включенные диоды попарно объединены и непосредственно и/или через датчики тока подключены к выходным выводам силовых транзисторных модулей, которые реализованы по мостовой или полумостовой схеме и вместе с входным емкостным фильтром или частью его конденсаторов размещены на подшипниковом щите и/или по меньшей мере на одном радиаторе, прижатом к подшипниковому щиту или прикрепленном к нему.
Достижение и улучшение указанного технического результата в частных случаях реализации индукторной электрической машины обеспечивается также за счет того, что:
- силовые транзисторные модули и входной емкостный фильтр или часть его конденсаторов размещены в одной плоскости на подшипниковом щите и/или по меньшей мере на одном радиаторе;
- диоды, включенные последовательно с обмотками фаз, размещены на подшипниковом щите и/или по меньшей мере на одном радиаторе;
- датчики тока размещены в отверстиях подшипникового щита и/или в отверстиях по меньшей мере одного радиатора вокруг или около проводов или шин, соединяющих фазные обмотки с преобразователем;
- обмотки фаз выполнены из двух или более параллельно соединенных проводов, а датчики тока приспособлены для измерения тока в одном проводе или части этих проводов;
- диоды, включенные последовательно с обмоткой каждой фазы, выполнены в круглом корпусе и непосредственно или с применением изоляторов впрессованы или вставлены в подшипниковый щит, и/или по меньшей мере в один радиатор, прикрепленный или прижатый к подшипниковому щиту непосредственно или через изолятор, и/или в силовые шины, соединяющие фазные обмотки с преобразователем;
- подшипниковый щит и/или по меньшей мере один радиатор содержит по меньшей мере один канал жидкостного охлаждения, гидравлически соединенный с каналом (каналами) жидкостного охлаждения статора.
Реализация каждого из указанных альтернативных отличительных признаков независимого пункта формулы изобретения, а также одновременная реализация нескольких этих признаков в любом сочетании, приводит к достижению одного и того же технического результата.
В частности, реализация статора с четным числом фаз и попарное объединение обмоток этих фаз через диоды, включенные последовательно и разнонаправленно, позволяет вместо несимметричных мостовых и полумостовых транзисторных модулей, традиционно применяющихся для работы совместно с индукторными электрическими машинами, имеющими число фаз, больше трех, использовать силовые транзисторные модули, реализованные по мостовой или полумостовой схеме и, как следствие, сократить общее количество модулей в преобразователе.
Обусловлено это тем, что для уменьшения осевой длины электрической машины с последовательным расположением встроенного преобразователя необходимо применение минимального количества малогабаритных силовых транзисторных модулей, в частности, в плоском корпусе типа EconoDual-3, имеющем размеры 152 мм (длина) × 62 мм (ширина) × 17 мм (высота). Такие модули выполнены по симметричной полумостовой схеме. Их реализация по схеме несимметричного полумоста или моста на аналогичные значения максимального тока технически и экономически нецелесообразна.
Поэтому при реализации, например, 4-фазной индукторной машины в классической индукторной машине с раздельным управлением каждой фазы от несимметричного мостового коммутатора необходимо применение 8-ми силовых транзисторных модулей (4-х нижних и 4-х верхних чоппера), а в предложенной индукторной электрической машине - 4 малогабаритных силовых транзисторных модуля, в частности, в указанном малогабаритном корпусе EconoDual-3.
Сокращение количества силовых транзисторных модулей, а также обеспечение возможности их применения в малогабаритных корпусах, позволяет разместить эти модули вместе с входным емкостным фильтром или частью его конденсаторов в пределах площади подшипникового щита - на самом подшипниковом щите и/или по меньшей мере на одном радиаторе, прижатом к подшипниковому щиту или прикрепленном к нему, что приводит к уменьшению осевой длины индукторной электрической машины со встроенным преобразователем без увеличения ее поперечных размеров.
При этом наличие в электрической машине четного числа фаз (четыре или более) в сочетании с описанной схемой их соединения с преобразователем дает возможность увеличить ее крутящий момент за счет одновременного включения в работу более одной фазы, что, с учетом сокращения осевой длины электрической машины со встроенным преобразователем, обеспечивает достижение указанного технического результата.
К этому же техническому результату приводит реализация технических решений, изложенного в зависимых пунктах формулы изобретения.
В частности, размещение силовых транзисторных модулей и входного емкостного фильтра, либо части его конденсаторов, в одной плоскости на подшипниковом щите и/или на одном или нескольких радиаторах, т.е. отказ от многоэтажной (многослойной, многоуровневой) конструкции преобразователя, позволяет сократить осевую длину преобразователя и, соответственно, уменьшить общую осевую длину электрической машины с этим преобразователем при одновременном повышении крутящего момента за счет увеличения числа одновременно работающих фаз.
Размещение на подшипниковом щите и/или по меньшей мере на одном радиаторе диодов, включенных последовательно с обмотками фаз, в промежутках между другими крупногабаритными компонентами преобразователя также обеспечивает сокращение осевой длины электрической машины с преобразователем и обеспечивает возможность повышения крутящего момента электрической машины за счет применения более сильноточных компонентов преобразователя.
Размещение датчиков тока в отверстиях подшипникового щита и/или в отверстиях одного или нескольких радиаторов вокруг или около проводов или шин, соединяющих фазные обмотки с преобразователем, предусмотренное третьим зависимым пунктом формулы изобретения, исключает необходимость выделения специального объема или площади для размещения этих датчиков в отсеке преобразователя, что позволяет сократить его осевую длину обеспечивает возможность измерения более высоких значений токов в фазных обмотках, что также обеспечивает достижение указанного технического результата.
Выполнение обмоток фаз из двух или более параллельно соединенных проводов и измерение тока в одном из этих проводов или их части приводит к уменьшению величины тока, измеряемого датчиками, к уменьшению размеров датчиков, сокращению объема, занимаемого датчиками, и к соответствующему уменьшению размеров преобразователя и всей электрической машины с этим преобразователем. Одновременно решается проблема измерения токов большой величины, что позволяет реализовать электрическую машину, работающую с более высокими значениями токов в фазных обмотках и, соответственно, с повышенным крутящим моментом.
Применение диодов, включенных последовательно с обмоткой каждой фазы, в круглом корпусе и их запрессовка или установка в подшипниковый щит, в радиатор и/или в силовые шины, соединяющие фазные обмотки с преобразователем, в частности, с применением изоляторов, позволяет уменьшить размеры и объем, занимаемый этими диодами (в том числе в случае, когда каждый диод реализован в виде группы параллельно соединенных диодов, рассчитанных на меньшее значение рабочего тока). Уменьшение общего объема, занимаемого диодами, позволяет сократить объем и осевую длину преобразователя и, соответственно, длину индукторной электрической машины с этим преобразователем. При этом открывается возможность применения более сильноточных диодов, что позволяет реализовать электрическую машину с повышенным крутящим моментом.
Наличие канала жидкостного охлаждения, гидравлически соединенного с каналами жидкостного охлаждения статора, в подшипниковом щите и/или по меньшей мере в одном радиаторе, на котором размещены силовые компоненты преобразователя, позволяет обеспечить их работу при более высоких значения плотности мощности, что обеспечивает увеличение мощности и крутящего момента электрической машины. При этом применение более малогабаритных компонентов преобразователя позволяет уменьшить его объем, что также обеспечивает достижение указанного технического результата.
Из изложенного следует, что реализация как одного (любого) так и одновременно нескольких отличительных признаков изобретения обеспечивает уменьшение осевой длины электрической машины со встроенным преобразователем без увеличения ее поперечных размеров (диаметра). Дополнительно это показано при описании различных вариантов осуществления данного изобретения.
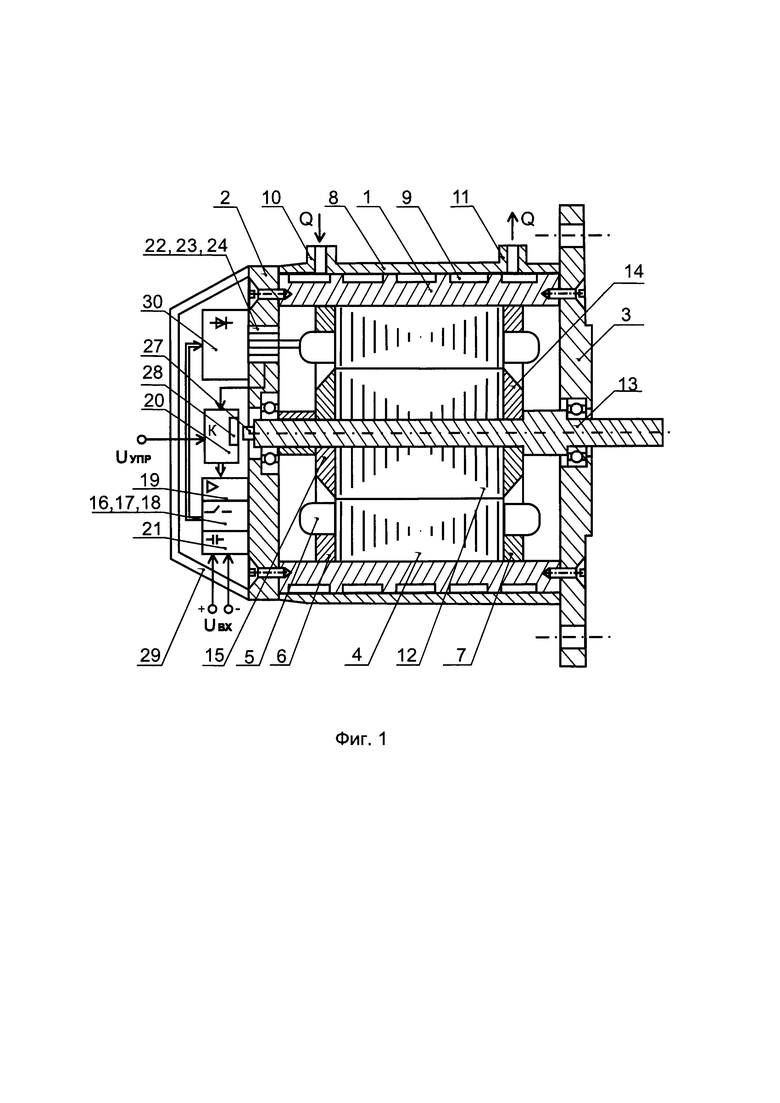
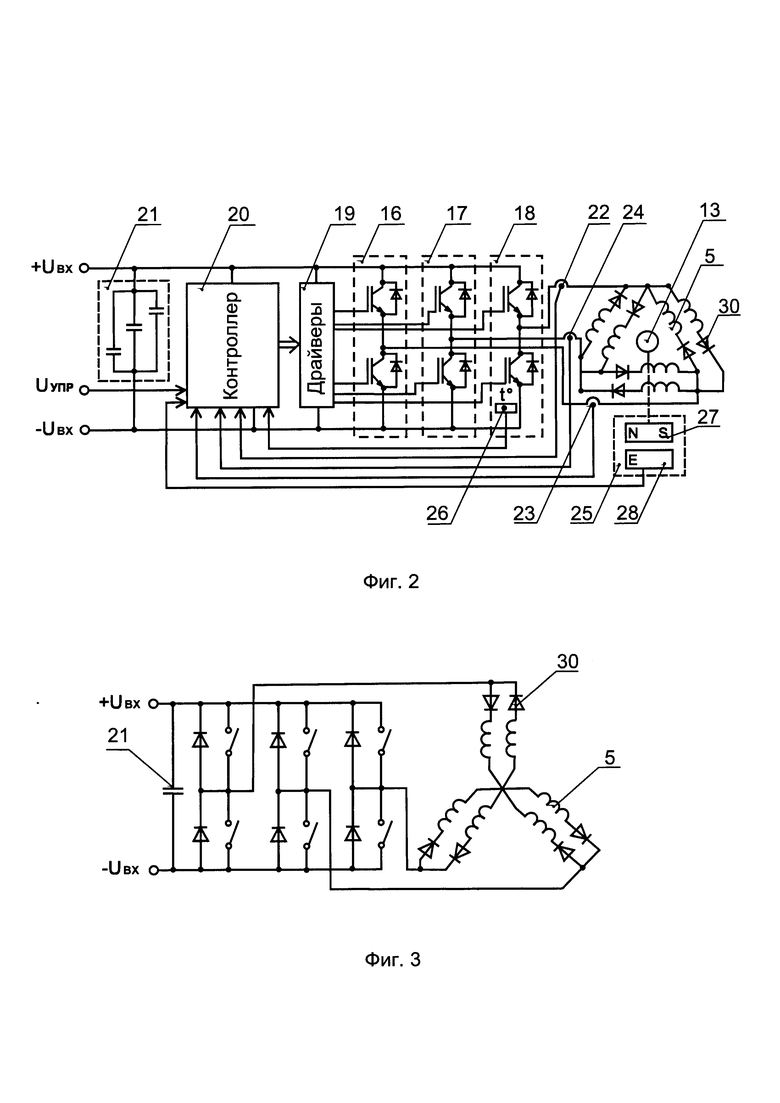
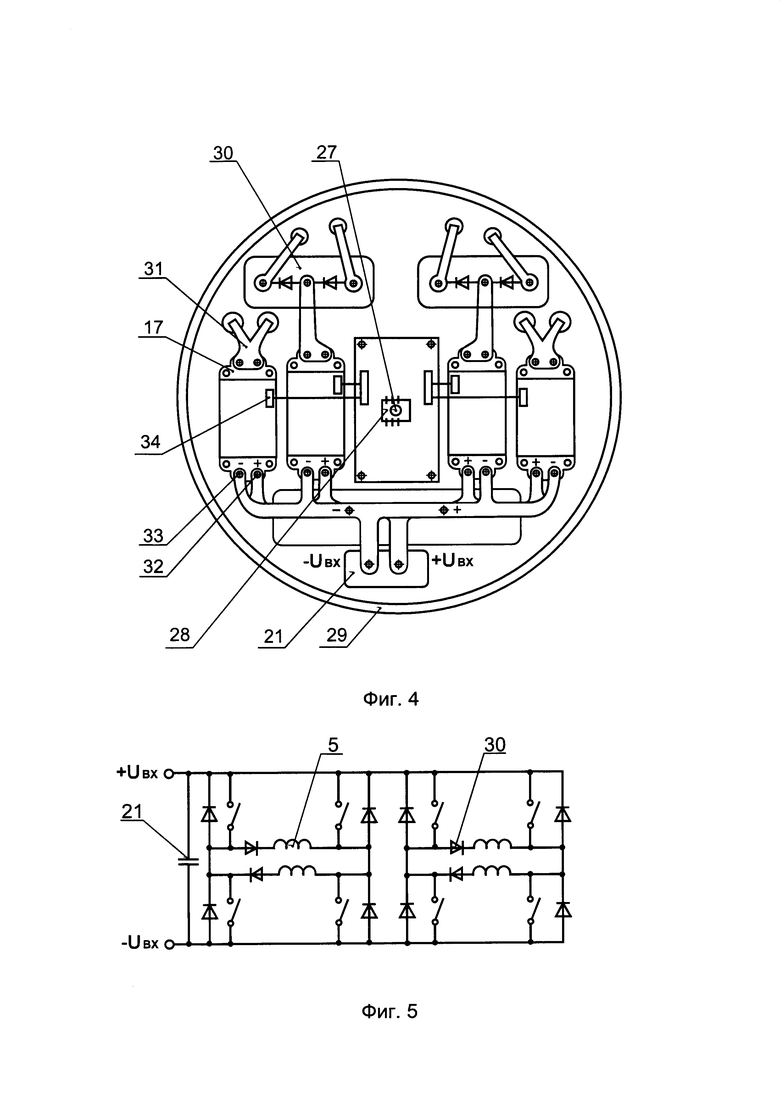
На фиг. 1 схематично представлена конструкция одного из возможных вариантов исполнения индукторной электрической машины со встроенным преобразователем. На фиг. 2 показан пример реализации преобразователя для шестифазной электрической машины, у которой фазные обмотки, попарно объединенные через диоды, соединены в треугольник, а на фиг. 3 - схема шестифазной электрической машины с попарным соединением ее фазных обмоток в звезду. На фиг. 4 приведен пример размещения составных частей преобразователя на заднем подшипниковом щите четырехфазной электрической машины, схема которой показана на фиг. 5.
Индукторная электрическая машина (двигатель и/или генератор) может именоваться также вентильно-индукторной, вентильной реактивной, вентильной индукторно-реактивной электрической машиной (ВИД, ВИГ, ВРД, ВРГ, ВИРД, ВИРГ и т.д.), а в зарубежной технической литературе - «Switched Reluctance Motor» (SRM) или «Switched Reluctance Generator» (SRG).
Под такой электрической машиной подразумевается синхронный электрический двигатель и/или генератор, у которого ротор не содержит постоянных магнитов и обмоток, статор выполняет функции якоря и индуктора, а процесс преобразования энергии обусловлен пульсациями магнитной индукции вследствие зубчатости ротора.
Индукторная электрическая машина со встроенным преобразователем содержит корпус или станину 1 с подшипниковыми щитами 2, 3. Внутри корпуса или станины размещен статор. На зубцах в пазах его магнитопровода (сердечника) 4, выполненного из листов электротехнической стали, размещены фазные обмотки 5. Магнитопровод статора закреплен с помощью нажимных шайб 6, 7.
Если конструкцией электрической машины предусмотрено использование корпуса в качестве не только несущего элемента, но и активной части электрической машины, проводящей магнитный поток, то корпус именуется станиной.
С наружной стороны корпуса или станины установлен наружный кожух 8. Между ними расположен спиральный канал 9 для охлаждающей жидкости Q, которая с помощью внешнего циркуляционного насоса подводиться к электрической машине и отводится от нее через патрубки (штуцеры) 10, 11. Охлаждение этой жидкости осуществляется во внешнем радиаторе. Каналы для охлаждающей жидкости могут быть также расположены между корпусом и статором электрической машины, между катушками его фазных обмоток и т.д.
Индукторная электрическая машина может также иметь бескорпусную конструкцию, в частности, с применением шпилек, стягивающих магнитопровод 4. В этом случае корпус 1 отсутствует, а для жидкостного охлаждения статора в спинке его магнитопровода выполнены каналы для охлаждающей жидкости, соединенные с коллекторами, выполненными в нажимных шайбах 6, 7 или в подшипниковых щитах 2, 3. Эти каналы могут быть выполнены в виде круглых отверстий, а пакет магнитопровода статора 4, с целью исключения протекания охлаждающей жидкости, может быть склеен, либо в эти отверстия могут быть вставлены трубки с их последующей развальцовкой или гидроопрессовкой.
Возможно также применение воздушного естественного, воздушного принудительного или испарительного охлаждения.
Сердечник (магнитопровод) ротора 12 выполнен шихтованным из листовой электротехнической стали и закреплен на валу 13, например, с помощью шпонки. Нажимные шайбы 14, 15 удерживают его листы в запрессованном состоянии.
Преобразователь, встроенный в индукторную электрическую машину, может именоваться также силовым коммутатором, инвертором, блоком управления, преобразователем электрической энергии, частотным преобразователем, электронной системой управления и т.п. Он содержит силовые транзисторные модули 16, 17, 18, их драйверы 19, контроллер 20, входной емкостный фильтр 21, датчики тока 22, 23, 24, датчик положения ротора 25, датчики температуры фазных обмоток 5, температуры 26 силовых транзисторных модулей, температуры охлаждающей жидкости в канале 9 и т.д. (фиг. 2).
Контроллер 20 может именоваться цифровым вычислителем, схемой управления, информационно-вычислительным блоком или устройством и т.д. Он может быть реализован в виде одной или нескольких печатных плат на основе программируемого микроконтроллера или специализированного цифрового сигнального процессора, предназначенного для цифрового управления электрическими машинами. Контроллер реализован из условия обеспечения возможности быстрого захвата сигналов с датчика положения ротора 25 и датчиков тока 22, 23, 24 в фазных обмотках 5, контроля напряжения на этих обмотках и входного напряжения (UBX) (в случае необходимости), формирования сигналов управления драйверами 19 силовых транзисторных модулей 16, 17, 18 в ответ на изменения контролируемых параметров индукторной электрической машины в реальном масштабе времени, защиты этих модулей и обмоток электрической машины от аварийных режимов (от перегрева, превышения тока и напряжения и т.п.), а также решения общих задач в системе, в которой используется данная индукторная электрическая машина со встроенным преобразователем, например, в электромеханической трансмиссии колесной или гусеничной машины.
Микроконтроллер или цифровой сигнальный процессор, на основе которого реализован контроллер 20, может содержать одно или несколько процессорных ядер, интегрированную оперативную память и Flash-память программ, встроенные аналого-цифровые преобразователи (АЦП), модули формирования широтно-модулированных сигналов (ШИМ) и набор коммуникационных интерфейсов.
Для обмена данными между преобразователем и внешними устройствами, входящими, например, в состав электромеханической трансмиссии (с органами управления, приборными панелями и т.д.), в том числе для приема сигналов управления и передачи сигналов о параметрах и режимах работы индукторной электрической машины, используется встроенное в контроллер 20 или подключенное к нему устройство ввода/вывода информации, реализующее обмен этими данными в аналоговой форме, или по проводному - CAN (Controller Area Network), LIN (Local Interconnect Network - интерфейс для автомобильных систем), J1850 (SAE), CarLink, VAN, A-bus, RS-232C (COM - порт), RS-232, RS-485 (Recommended Standard 485), «Токовая петля», MIDI, MicroLAN, Ethernet, USB и т.д., или по беспроводному - Wi-Fi, Bluetooth, ZigBee, GSM, CDMA и т.д. интерфейсу (протоколу, стандарту).
Входной емкостный фильтр 21 содержит группу пленочных, и/или электролитических, и/или керамических конденсаторов, которые именуются силовыми конденсаторами (DC-Link) и рассчитаны на работу с большими импульсными токами.
Датчик положения ротора 25 может быть выполнен в виде магнитного энкодера. В этом случае он содержит постоянный магнит 27 с диаметральным намагничиванием, прикрепленный к торцу вала ротора 13, и микросхему магнитного энкодера 28, которая может быть размещена на отдельной печатной плате или на печатной плате контроллера 20. Возможна также реализация датчика положения ротора на основе оптического энкодера, дискретных оптических или магнитных переключателей, например трех оптронов с открытым оптическим каналом или датчиков Холла, а также на основе вращающегося трансформатора.
Преобразователь размещен на подшипниковом щите 2 в отсеке, именуемом отсеком преобразователя, одна стенка которого является поверхностью подшипникового щита или поверхностью одного или нескольких радиаторов, прикрепленных к этому щиту. Прочие стенки отсека преобразователя образует защитный кожух 29 (фиг. 4).
Силовые транзисторные модули 16, 17, 18 содержит группу биполярных транзисторов с изолированным затвором (БТИЗ) (анг. IGBT - Insulated-gate bipolar transistor), полевых транзисторов с изолированным затвором (МОП - металл-окисел-полупроводник или МДП - металл-диэлектрик-полупроводник), а по англоязычной терминологии - MOS, MOSFET или МОСФЕТ (от сокращения словосочетаний: «Metal-Oxide-Semiconductor» (металл-окисел-полупроводник) и «Field-Effect-Transistors» (транзистор, управляемый электрическим полем) и их транскрипции, или биполярных транзисторов и диодов. Их кристаллы размещены в отдельных корпусах, например, типа ТО-220, ТО-247, ТО-251АА, ТО-3, ТО-3Р и т.п., или общем корпусе, в частности, на медно-керамической подложке DBC (Direct Bond Copper).
Предпочтительным является применение силовых транзисторных модулей, в которых внутренние силовые шины расположены между кристаллами транзисторов и диодов и керамической подложкой, т.е. реализованы путем утолщения медного слоя на DBC подложке. Примером таких модулей являются модули в плоских малогабаритных корпусах типа EconoDul-3, имеющие размеры 152 мм (длина) × 62 мм (ширина) × 17 мм (высота), в которых транзисторы и диоды соединены по схеме симметричного полумоста (см. фиг. 2, 3, 5).
Возможно также применение модулей аналогичного конструктивного исполнения, реализованных по схеме симметричного моста.
Индукторная электрическая машина имеет четное число фаз. Последовательно с обмотками каждой фазы 5 включен развязывающий диод 30. Эти обмотки попарно объединены. Диоды 30 в попарно объединенных обмотках включены встречно. Каждая пара обмоток непосредственно или через датчики тока 22, 23, 24 соединена с выходными выводами силовых транзисторных модулей 16, 17, 18.
Датчики тока выполнены на основе датчиков Холла с кольцевыми магнитопроводами, либо без кольцевых магнитопроводов, и могут быть размещены в отверстиях подшипникового щита и/или по меньшей мере одного радиатора, соответственно, вокруг или около проводов или шин, соединяющих фазные обмотки с преобразователем (фиг. 1). В последнем случае датчики Холла обеспечивают измерение магнитных полей, создаваемых в воздухе вокруг этих датчиков токами, протекающими в подводящих проводах или шинах фазных обмоток 5.
В случае, когда обмотки фаз выполнены из двух или более параллельно соединенных проводов, датчики тока, с целью уменьшения их размеров, могут быть приспособлены для измерения тока в одном проводе или в части этих проводов.
Например, если катушки фазных обмоток намотаны 10-ю параллельно соединенными обмоточными проводами, а в обмотках протекает ток, максимальное значение которого составляет 500А, то в случае пропускания через кольцевой магнитопровод датчика тока одного из этих проводов максимальное значение тока, измеряемого этим датчиком, уменьшается до 50 А - в 10 раз. Благодаря этому обеспечивается сокращение размеров магнитопроводов и самих датчиков тока, что приводит к уменьшения размеров преобразователя и индукторной электрической машины с этим преобразователем.
Возможно также применение силовых транзисторных модулей со встроенными, в частности, резистивными, датчиками тока, а также установка датчиков тока в цепи (шины, провода) питания преобразователя (+UBX, -UBX). В этом случае используется непосредственное соединение каждой пары обмоток с силовыми транзисторными модулями 16, 17, 18.
Драйверы 19 транзисторов силовых модулей 16, 17, 18 размещены в промежутках между силовыми транзисторными модулями или над этими модулями между их выходными выводами 31 и плюсовыми 32 (+UBX) и минусовыми 33 (-UBX) выводами (фиг. 4) и выполнены с реализацией функций защиты этих транзисторов от перегрузок по току, по напряжению и от перегрева. Драйверы формируют также сигналы неисправностей транзисторов этих модулей и соединенных с ними фазных обмоток 5 индукторной электрической машины. Для обеспечения возможности защиты силовых транзисторных модулей от перегрева в их состав входят датчики температуры 26, соединенные с контроллером 20.
Сигнальные выводы драйверов, соединенные с программируемым микропроцессорным контроллером 20 с помощью электрических разъемов 34, имеют гальваническую развязку от напряжения питания электрической машины и высоковольтной части драйверов +UBX, -UBX.
Силовые транзисторные модули 16, 17, 18, а также входной емкостный фильтр 21 или часть его конденсаторов, расположены на поверхности подшипникового щита 2, имеющего встроенный канал жидкостного охлаждения, гидравлически соединенный с каналом (каналами) жидкостного охлаждения статора 9. Этот канал может быть выполнен в виде внутренних полостей подшипникового щита или в виде медной или латунной трубки, впрессованной в выемки подшипникового щита. На этом же подшипниковом щите размещены диоды 30, включенные последовательно с обмотками фаз.
В другом варианте реализации индукторной электрической машины со встроенным преобразователем между подшипниковым щитом и всеми или частью указанных составных частей преобразователя может быть расположен один или несколько радиаторов, в частности, с каналами жидкостного охлаждения, также гидравлически соединенные с каналами жидкостного охлаждения статора 9. Установка составных частей преобразователя не непосредственно на подшипниковый щит, а через промежуточные радиаторы целесообразна, в частности, для улучшения технологичности изготовления преобразователя или с целью обеспечения гальванической развязки этих составных частей преобразователя от подшипникового щита 2. В последнем случае между радиатором (радиаторами) и подшипниковым щитом устанавливаются изоляционные прокладки.
Диоды, включенные последовательно с обмоткой каждой фазой, могут быть выполнены в круглом корпусе, приспособленном под запрессовку (диоды типа Press Fit) и, соответственно, впрессованы или вставлены в подшипниковый щит и/или в радиатор (в несколько радиаторов). Эти диоды могут быть также впрессованы в силовые шины, соединяющие фазные обмотки с преобразователем.
Их запрессовка или установка, в случае необходимости, может выполняться с применением кольцевых изоляторов. Например, может использоваться запрессовка через промежуточные изоляционные кольца или заливка изоляционным компаундом диодов, вставленных в подшипниковый щит или в радиатор.
Возможен вариант реализации преобразователя, в котором каждый из диодов 30 выполнен в виде группы параллельно соединенных Press Fit диодов, впрессованных в радиатор. Этот радиатор прикрепляется или прижимается к подшипниковому щиту непосредственно или через изолятор - изоляционную прокладку.
При этом, ввиду малых габаритных размеров Press Fit диодов, их общая высота совместно с радиаторами меньше высоты силовых транзисторных модулей. Поэтому применение одного или нескольких радиаторов упрощает монтаж диодов, не приводя при этом к увеличению размеров преобразователя.
Реализация каждого диода 30 в виде группы параллельно соединенных Press Fit диодов, впрессованных в радиатор, в отличие от применения мощных диодов в прямоугольном корпусе, позволяет реализовать диодные модули любой формы. Это обеспечивает возможность их установки на подшипниковом щите в промежутках между крупногабаритными составными частями преобразователя (силовыми транзисторными модулями, контроллером 20, конденсаторами входного фильтра 21 и т.д.). Это обеспечивает максимально полное заполнение площади подшипникового щита и, соответственно, позволяет разместить их в одной плоскости. Исключение необходимости реализации многоэтажной (многоуровневой) компоновки составных частей преобразователя, в сочетании с минимизацией количества и размеров силовых транзисторных модулей, обеспечивает сокращение размеров преобразователя по высоте и, соответственно, уменьшение осевых размеров индукторной электрической машины со встроенным преобразователем.
Работа устройства осуществляется следующим образом.
Внешний сигнал управления UУПР в аналоговой или цифровой форме через устройство ввода/вывода информации, например, через драйвер CAN шины, поступает на контроллер 20.
Этот сигнал задает необходимый уровень выходного напряжения генератора, если электрическая машина представляет собой индукторный электрический генератор или индукторный электрический двигатель, работающий в режиме генератора, либо необходимую выходную скорость или выходной крутящий момент электрической машины, если она представляет собой электрический двигатель.
При работе в режиме индукторного электрического генератора напряжение питания +UBX, _UBX преобразователя первоначально подается от внешнего источника постоянного тока, например, от аккумуляторной батареи. Ротор генератора приводится во вращение, например, двигателем внутреннего сгорания.
Контроллер 20, работая по программе, записанной в памяти его микроконтроллера или цифрового сигнального процессора, формирует сигналы на драйверы 19 силовых транзисторных модулей в соответствии с сигналами датчика положения ротора 25. Драйверы 19 в соответствии с полученными импульсами управления формируют напряжения на затворах силовых IGBT или MOSFET транзисторов, либо токи баз биполярных силовых транзисторов, обеспечивая их включение/выключение в соответствующие моменты времени. Силовые транзисторы, входящие в состав силовых транзисторных модулей, попеременно подключают фазные обмотки 5 электрической машины через силовые шины к выводам питания +UBX, -UBX, обеспечивая протекание тока по фазным обмоткам 5. Благодаря этому обеспечивается возбуждение электрического генератора, либо создание вращающего момента электрического двигателя. При этом осуществляется не одиночная, а парная или несимметричная коммутация, что обеспечивает повышение крутящего момента электрической машины.
При работе устройства в режиме электрического генератора диоды, входящие в состав силовых транзисторных модулей 16, 17 и 18, выполняют роль силового выпрямителя (в примере, показанном на фиг. 2 - трехфазного мостового выпрямителя).
Поскольку информация о положении ротора электрической машины относительно статора представлена в цифровой форме, для коммутации фазных обмоток 5, контроллер 20 реализует алгоритм логического преобразования сигналов датчика положения ротора 25 в сигналы управления драйверами 19 силовых транзисторных модулей, записанный в его Flash-памяти программ. Этот алгоритм может быть представлен, в частности, в виде математических формул или таблиц.
Для регулирования выходного напряжения электрического генератора или крутящего момента электрического двигателя контроллер 20 осуществляет изменение величины тока в фазных обмотках 5 путем изменения длительности или скважности включения этих обмоток, формируя соответствующие импульсные сигналы управления драйверами 19 силовых транзисторных модулей с учетом необходимых углов опережения включения силовых транзисторов. В простейшем случае это осуществляется путем реализации гистерезисного регулятора - включения и отключения силовых транзисторов в модулях в нужные моменты времени в зависимости о величин токов в фазных обмотках.
Под действием этого момента ротор начинает вращаться и через механическую передачу (при ее наличии) приводит в движение, например, колеса или гусеницы транспортной или тяговой машины.
После того, когда при работе электрической машины в режиме электрического двигателя скорость вращения вала ротора достигнет заданной величины, или когда при работе в режиме электрического генератора будет достигнута необходимая величина напряжения на нагрузке, подключенной параллельно цепям питания преобразователя, контроллер 20 уменьшает длительности импульсов в сигналах управления драйверами 19, обеспечивая стабилизацию, соответственно, заданной скорости вращения вала электродвигателя или выходного напряжения генератора.
Одновременно контроллер 20 с помощью датчиков температуры, тока и напряжения осуществляет контроль параметров и режимов работы индукторной электрической машины и силовой части преобразователя и реализует алгоритмы их защиты от аварийных режимов, в том числе от перегрева силовых транзисторных модулей, фазных обмоток и шин (проводов), а также защиту от перегрузок силовых транзисторных модулей по току и по напряжению. Алгоритмы защиты предусматривают отключение сигналов управления силовых транзисторных модулей в случае, если величина контролируемого параметра превышает предварительно установленную максимально допустимую величину.
Для специалистов в данной области техники понятно, что кроме описанных вариантов индукторной электрической машины со встроенным преобразователем возможны также иные варианты ее реализации на основе признаков, изложенных в формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕНТИЛЬНО-ИНДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С ПЕРЕКЛЮЧАЕМЫМИ ФАЗНЫМИ ОБМОТКАМИ | 2018 |
|
RU2698464C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА СО ВСТРОЕННЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2017 |
|
RU2656866C1 |
| МЕХАТРОННЫЙ ТЯГОВЫЙ МОДУЛЬ | 2016 |
|
RU2621410C1 |
| ИНДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2017 |
|
RU2662233C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ САМОХОДНОЙ МАШИНЫ | 2015 |
|
RU2605957C1 |
| САМОХОДНАЯ МАШИНА С ЭЛЕКТРИЧЕСКОЙ СИСТЕМОЙ ПРИВОДА | 2019 |
|
RU2715820C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА С ПОПЕРЕЧНЫМ МАГНИТНЫМ ПОТОКОМ (ВАРИАНТЫ) | 2018 |
|
RU2690666C1 |
| ИНДУКТОРНЫЙ ГЕНЕРАТОР С СОВМЕЩЕННЫМИ ОБМОТКАМИ ВОЗБУЖДЕНИЯ И СТАТОРА | 2017 |
|
RU2658636C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ САМОХОДНОЙ МАШИНЫ | 2017 |
|
RU2648660C1 |
| ГУСЕНИЧНЫЙ ТРАКТОР-ТЯГАЧ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2019 |
|
RU2726350C1 |
Изобретение относится к области электротехники. Технический результат - уменьшение осевой длины индукторной электрической машины со встроенным преобразователем без увеличения ее поперечных размеров при одновременном повышении ее крутящего момента. Индукторная электрическая машина содержит статор с фазными обмотками, безобмоточный ротор с зубчатым магнитопроводом, подшипниковые щиты и преобразователь, в состав которого входят силовые транзисторные модули, их драйверы, емкостный фильтр в цепи питания, контроллер, осуществляющий прием сигналов управления индукторной электрической машиной и формирование сигналов управления драйверами, а также датчики тока и положения ротора, соединенные с контроллером. Статор имеет четное число фаз. Фазные обмотки статора через разнонаправленно включенные диоды попарно объединены и подключены к силовым транзисторным модулям, которые вместе с входным емкостным фильтром размещены в одной плоскости непосредственно на подшипниковом щите и/или на радиаторах, прижатых к подшипниковому щиту. 7 з.п. ф-лы, 5 ил.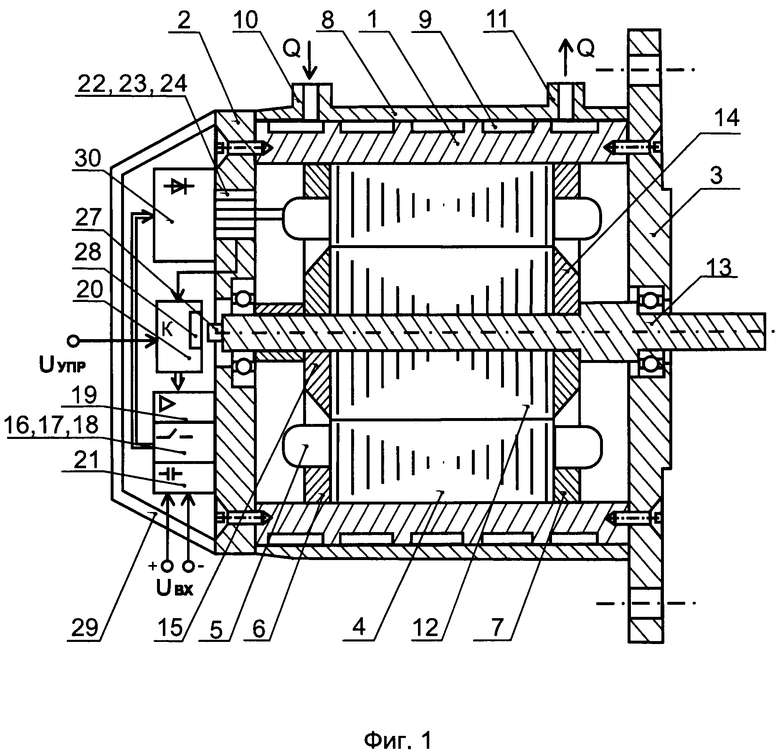
1. Индукторная электрическая машина со встроенным преобразователем, содержащая статор с фазными обмотками, размещенными на зубцах магнитопровода статора в его пазах, безобмоточный ротор, на валу которого закреплен зубчатый магнитопровод, подшипниковые щиты и преобразователь, в состав которого входят силовые транзисторные модули, их драйверы, емкостный фильтр в цепи питания, контроллер, выполненный с возможностью приема сигналов управления индукторной электрической машиной и формирования сигналов управления драйверами, по меньшей мере один датчик тока и/или датчик положения ротора, соединенный с контроллером, при этом статор имеет 2N фаз, где N больше или равно двум, последовательно с обмотками каждой фазы включен диод, фазные обмотки через разнонаправленно включенные диоды попарно объединены и непосредственно и/или через датчики тока подключены к выходным выводам силовых транзисторных модулей, которые реализованы по мостовой или полумостовой схеме и вместе с входным емкостным фильтром или с частью его конденсаторов размещены на подшипниковом щите и/или по меньшей мере на одном радиаторе, прижатом к подшипниковому щиту или прикрепленном к нему.
2. Индукторная электрическая машина по п. 1, отличающаяся тем, что силовые транзисторные модули и входной емкостный фильтр или часть его конденсаторов размещены в одной плоскости на подшипниковом щите и/или по меньшей мере на одном радиаторе.
3. Индукторная электрическая машина по п. 1 или 2, отличающаяся тем, что диоды, включенные последовательно с обмотками фаз, размещены на подшипниковом щите и/или по меньшей мере на одном радиаторе.
4. Индукторная электрическая машина по п. 1, отличающаяся тем, что датчики тока размещены в отверстиях подшипникового щита и/или по меньшей мере одного радиатора вокруг или около проводов или шин, соединяющих фазные обмотки с преобразователем.
5. Индукторная электрическая машина по п. 1, отличающаяся тем, что обмотки фаз выполнены из двух или более параллельно соединенных проводов, а датчики тока приспособлены для измерения тока в одном проводе или в части этих проводов.
6. Индукторная электрическая машина по п. 1, отличающаяся тем, что диоды, включенные последовательно с обмоткой каждой фазой, впрессованы или вставлены в подшипниковый щит, и/или по меньшей мере в один радиатор, и/или в силовые шины, приспособленные для соединения фазных обмоток с преобразователем.
7. Индукторная электрическая машина по п. 6, отличающаяся тем, что диоды, включенные последовательно с обмотками каждой фазы, выполнены в круглом корпусе и впрессованы или вставлены в подшипниковый щит с применением изоляторов и/или впрессованы или вставлены по меньшей мере в один радиатор, прикрепленный или прижатый к подшипниковому щиту непосредственно или через изолятор.
8. Электрическая машина со встроенным преобразователем по п. 1, отличающаяся тем, что подшипниковый щит и/или по меньшей мере один радиатор содержит по меньшей мере один канал жидкостного охлаждения, гидравлически соединенный с каналом или каналами жидкостного охлаждения статора.
| ЭЛЕКТРИЧЕСКАЯ МАШИНА СО ВСТРОЕННЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2017 |
|
RU2656866C1 |
| ТЯГОВЫЙ МЕХАТРОННЫЙ МОДУЛЬ | 2007 |
|
RU2330371C1 |
| Ребристый блок для сборной, преимущественно, железобетонной обделки тоннеля | 1959 |
|
SU128036A1 |
| МЕХАТРОННЫЙ ТЯГОВЫЙ МОДУЛЬ | 2016 |
|
RU2621410C1 |
| ШЕСТИФАЗНЫЙ ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ДВИГАТЕЛЬ С КОНЦЕНТРИЧЕСКИМИ ОБМОТКАМИ, УПРАВЛЯЕМЫЙ ТРЕХФАЗНЫМ ТОКОМ СИНУСОИДАЛЬНОЙ ФОРМЫ | 2013 |
|
RU2540957C1 |
| ВЕНТИЛЬНО-ИНДУКТОРНАЯ МАШИНА | 2001 |
|
RU2189685C1 |
| JP 2012090412 A, 10.05.2012. | |||

