Изобретение относится к области машиностроения, а именно к электрическим трансмиссиям машин различного назначения на основе бесконтактных электрических машин с силовыми полупроводниковыми преобразователями.
Известна электрическая трансмиссия с тяговыми электродвигателями постоянного тока со встроенными контроллерами скорости, в которых конструктивно объединены электродвигатель и блок управления этим электродвигателем [1].
Ее недостатком является пониженная надежность, вызванная наличием коллекторного узла электрической машины, а также пониженная удельная мощность, обусловленная отсутствием конструктивных элементов, обеспечивающих эффективный отвод тепла от электрической машины.
Известен также мехатронный модульный агрегат, содержащий корпус, в котором расположены электрическая машина и элементы силовой электроники, причем корпус выполнен в виде двух герметично соединяемых отсеков, в одном из которых расположена электрическая машина, а в другом - элементы силовой электроники. Между отсеками при сборке корпуса образована полость, сообщающаяся с системой охлаждения [2].
Его недостатком является пониженная удельная мощность, обусловленная наличием двух охлаждаемых отсеков и, соответственно, повышенными габаритными размерами этого агрегата.
Наиболее близким техническим решением является тяговый мехатронный модуль на базе электрической машины и силового транзисторного преобразователя с датчиками тока в цепях обмоток электрической машины вблизи силовых транзисторных модулей. Жидкостное охлаждение электрической машины и силового преобразователя обеспечивается за счет параллельного протекания теплоносителя по двум полостям, одна из которых охватывает статор электрической машины, а вторая расположена с торца и своей внешней стенкой обеспечивает отвод тепла от транзисторных модулей силового преобразователя [3].
Недостатком этого мехатронного тягового модуля является невысокая удельная мощность. Это обусловлено наличием двух полостей для протекания теплоносителя и соответствующих дополнительных конструктивных элементов, необходимых для размещения транзисторных модулей, что увеличивает габаритные размеры мехатронного тягового модуля. Кроме того в известном модуле не предусмотрена реализация конструктивных и программных решений, направленных на снижение тепловых потерь и увеличение выходной мощности мехатронного тягового модуля, в том числе в динамических режимах его работы.
Задачей изобретения является создание интеллектуального мехатронного тягового модуля, имеющего повышенную удельную мощность, под которой подразумевается отношение выходной механической мощности мехатронного тягового модуля к его объему (кВт/дм3).
В мехатронном тяговом модуле, содержащем корпус с жидкостным охлаждением, подшипниковые щиты, ротор электрической машины, статор электрической машины, содержащий обмотки и закрепленный внутри корпуса с возможностью передачи тепла на этот корпус, датчик положения ротора, силовой преобразователь, соединенный с обмотками статора и выполненный с использованием дискретных силовых транзисторов и диодов и/или объединенных в транзисторно-диодные модули, драйверы силовых транзисторов, программируемый микропроцессорный контроллер, приспособленный для приема сигналов управления мехатронным тяговым модулем и соединенный с драйверами и датчиком положения ротора, и фильтр, содержащий конденсаторы, подключенные к плюсовому и минусовому выводам силового преобразователя, повышение удельной мощности достигается за счет реализации по меньшей мере одного из следующих технических решений:
- силовые транзисторы и/или транзисторно-диодные модули непосредственно и/или через дополнительные теплопроводящие и/или электроизоляционные элементы прикреплены или прижаты к внутренней и/или наружной поверхности корпуса и/или по меньшей мере одного подшипникового щита с возможностью передачи тепла на этот корпус и/или подшипниковый щит;
- по меньшей мере один подшипниковый щит выполнен с жидкостным охлаждением;
- силовые транзисторы и диоды и/или транзисторно-диодные модули имеют жидкостное охлаждение;
- силовые транзисторы и/или транзисторно-диодные модули непосредственно и/или через дополнительные теплопроводящие и/или электроизоляционные элементы прикреплены или прижаты к спинке статора или к нажимной шайбе статора с возможностью передачи тепла на эту спинку или нажимную шайбу;
- силовой преобразователь, и/или программируемый микропроцессорный контроллер, и/или фильтр, размещен/размещены в корпусе между подшипниковым щитом и спинкой статора и/или обмотками статора, а также отделены от этой спинки и/или от этих обмоток теплоизоляционной перегородкой или прокладкой;
- силовой преобразователь и программируемый микропроцессорный контроллер выполнены с возможностью раздельного управления секциями обмотки статора и/или с возможностью их переключения с последовательного соединения на параллельное и обратно в зависимости от скорости вращения ротора электрической машины;;
- силовой преобразователь и программируемый микропроцессорный контроллер выполнены с возможностью переключения секций обмотки каждого полюса статора на последовательное/параллельное соединение в зависимости от скорости вращения ротора электрической машины;
- электрическая машина имеет более одной пары полюсов в каждой из ее фаз, а силовой преобразователь и программируемый микропроцессорный контроллер обеспечивают отключение отдельных пар полюсов и/или поочередное включение различных пар полюсов каждой фазы в зависимости от величины нагрузки электрической машины;
- сосредоточенные обмотки каждого полюса статора состоят не менее, чем из двух секций, при этом секция, расположенная у спинки статора, имеет увеличенную ширину, выбранную из условия максимального заполнения медью промежутка между полюсами статора с возможностью осуществления сборки электрической машины путем первоочередной установки на полюс магнитопровода статора секции сосредоточенной обмотки, имеющей увеличенную ширину;
- силовой преобразователь и программируемый микропроцессорный контроллер обеспечивают широтно-импульсное регулирования тока в обмотках или секциях обмоток одной пары и/или различных пар полюсов в противофазе или со сдвигом времени включения силовых транзисторов;
- драйверы приспособлены для контроля исправности силовых транзисторов и/или соединенных с ними обмоток, имеют гальваническую развязку сигналов управления и/или формируемых этим драйвером сигналов неисправности, а программируемый микропроцессорный контроллер осуществляет отключение отдельных силовых транзисторов в соответствии с полученными сигналами о наличии неисправностей;
- драйверы оснащены средствами гальванической развязки сигналов управления силовыми транзисторами и/или сигналов неисправности этих транзисторов и/или соединенных с ними обмоток;
- программируемый микропроцессорный контроллер осуществляет контроль или измерение выходной мощности, выходного момента, температуры электрической машины, температуры охлаждающей жидкости или скорости вращения ротора, а также управляет силовыми транзисторами таким образом, чтобы величина контролируемого или измеряемого параметра не превышала его предварительно установленную величину;
- программируемый микропроцессорный контроллер осуществляет контроль или измерение момента нагрузки электрической машины и скорости вращения ее ротора и далее управляет силовыми транзисторами из условия поддержания заданной скорости вращения ротора, если момент нагрузки не превышает максимальный выходной момент электрической машины при заданной скорости вращения ротора, либо из условия поддержания выходной мощности электрической машины путем увеличения/уменьшения скорости вращения ее ротора при уменьшении/увеличении момента нагрузки до достижения равенства момента нагрузки и максимального выходного момента электрической машины;
- программируемый микропроцессорный контроллер управляет силовыми транзисторами, реализуя зависимость скорости или выходного момента электрической машины от времени, предварительно записанную в память программируемого микропроцессорного контроллера и обеспечивающую, например, достижение максимально возможной средней выходной мощности в интервале времени, в котором реализуется эта зависимость;
- мехатронный тяговый модуль дополнительно содержит тормозной резистор и силовой электронный ключ тормозного резистора, соединенный с программируемым микропроцессорным контроллером и приспособленный для подключения тормозного резистора к плюсовому и минусовому выводам силового преобразователя в случае необходимости, например, если скорость вращения ротора электрической машины превышает заданную величину;
- мехатронный тяговый модуль содержит встроенный прецессионный редуктор или редуктор с внутренним или внешним зацеплением зубчатых колес, имеющих эвольвентную, или круговую (передача Новикова), или циклоидальную форму профиля их зубьев, причем этот редуктор выполнен, в частности, самотормозящимся;
- мехатронный тяговый модуль содержит встроенный дисковый электромагнитный тормоз, включаемый пружинами, причем обмотка электромагнита этого тормоза размещена на подшипниковом щите или прикреплена к нему, а силовой преобразователь содержит дополнительный силовой электронный ключ электромагнитного тормоза, соединенный с программируемым микропроцессорным контроллером и приспособленный для управления этим тормозом;
- мехатронный тяговый модуль содержит встроенный электромагнитный тормоз, а электрическая машина выполнена с независимым возбуждением, в частности, вентильно-индукторной, причем магнитный поток, создаваемый обмоткой возбуждения, дополнительно используется для управления встроенным электромагнитным тормозом;
- программируемый микропроцессорный контроллер дополнительно оснащен средством беспроводного приема сигналов управления мехатронным тяговым модулем и/или беспроводной передачи сигналов о параметрах его работы и/или технического состояния;
- электрическая машина выполнена преимущественно без использования постоянных магнитов, с классом нагревостойкости изоляции обмоток не ниже, чем 150°С, а силовой преобразователь и программируемый микропроцессорный контроллер - с использованием компонентов, имеющих рабочую температуру не менее, чем 100°С.
В различных вариантах исполнения мехатронного тягового модуля, а также с целью его дальнейшего улучшения, дополнительно:
- внутренняя поверхность корпуса или подшипникового щита, к которой прикреплены или прижаты силовые транзисторы и/или транзисторно-диодные модули, приспособлена для размещения силовых транзисторов и/или транзисторно-диодных модулей, в частности, по своей форме повторяет теплопередающие поверхности силовых транзисторов и/или транзисторно-диодных модулей;
- силовые транзисторы и/или транзисторно-диодные модули размещены в корпусе у спинки статора по меньшей мере с частичным использованием объема между лобовыми частями обмоток статора и корпусом;
- силовые транзисторы и диоды и/или транзисторно-диодные модули имеют жидкостное охлаждение и размещены на подшипниковом щите, причем каналы жидкостного охлаждения этих силовых транзисторов и диодов и/или транзисторно-диодных модулей соединены с каналами жидкостного охлаждения подшипникового щита;
- мехатронный тяговый модуль содержит электромагнитные реле, которые под управлением программируемого микропроцессорного контроллера осуществляют переключение обмоток или секций обмоток электрической машины с последовательного на параллельное соединение при увеличении скорости вращения ротора;
- программируемый микропроцессорный контроллер обеспечивает управление силовыми транзисторами из условия поддержания установленной тяговой мощности мехатронного тягового модуля путем увеличения/уменьшения скорости вращения ротора при уменьшении/увеличении нагрузки электрической машины, а также осуществляет изменение установленной тяговой мощности в зависимости от ее температуры;
- обмотка встроенного дискового электромагнитного тормоза имеет жидкостное охлаждение;
- ротор оснащен крыльчаткой вентилятора, приспособленной для принудительной циркуляции охлаждающего воздуха внутри мехатронного тягового модуля.
Реализация каждого альтернативного технического решения независимого пункта формулы приводит либо к увеличению выходной механической мощности мехатронного тягового модуля, либо к уменьшению его объема. Поэтому реализация технических решений, характеризующихся указанными альтернативными отличительными признаками независимого пункта формулы изобретения, обеспечивает повышение удельной мощности мехатронного тягового модуля - увеличение отношения тяговой мощности к его объему (кВт/дм3). Это достигается как за счет уменьшения объема тягового модуля путем оптимизации его конструкции (сокращения его габаритных размеров), так и за счет повышения тяговой мощности без увеличения этого объема.
Величина выходной механической мощности тягового модуля, в частности, зависит от условий его охлаждения. Обусловлено это тем, что форсирование режимов работы тягового модуля, т.е. увеличение его мощности без увеличения объема, например, путем увеличения плотности тока в обмотках статора, приводит к увеличению выделения тепла в обмотках, что ограничивает возможность этого форсирования. Поэтому реализация любого из предложенных вариантов улучшения условий охлаждения обеспечивает повышения выходной и, соответственно, удельной механической мощности тягового модуля без превышения предельно допустимой температуры его компонентов.
При установленной теплостойкости элементов тягового модуля повышение его тяговой мощности достигается за счет улучшения охлаждения этих элементов, снижения потерь энергии в них и реализации защиты от перегрева элементов с наименьшей теплостойкостью.
Различные способы снижения потерь в тяговом модуле, изложенные в альтернативных технических решениях - снижение динамических потерь в преобразователе, исключение потерь в неисправных компонентах и т.д., обеспечивают снижение выделение тепла в тяговом модуле. Поскольку в реальной конструкции тягового модуля возможности его охлаждения и предельная рабочая температура его компонентов ограничены, снижение выделения тепла в тяговом модуле позволяют увеличить его мощность и удельную мощность путем форсирования режимов его работы.
Повышение предельной рабочей температуры при заданных условиях охлаждения тягового модуля при реализации альтернативного технического решения (х) позволяет увеличить его мощность и удельную мощность путем форсирования режимов его работы, поскольку чем выше допустимая рабочая температура тягового модуля, тем более высокую мощность можно подвести к этому модулю и, соответственно, тем более высокую выходную мощность можно получить без риска его выхода из строя вследствие перегрева и без увеличения объема модуля.
Увеличение коэффициента заполнения медью окна между полюсами статора, изложенное в альтернативном техническом решении (и), позволяет увеличить сечение провода в обмотках и, соответственно, снизить тепловые потери в обмотках за счет снижения их электрического (омического) сопротивления при протекании тока по этим обмоткам. Снижение указанных потерь позволяет увеличить мощность тягового модуля без увеличения его объема и, соответственно, удельную мощность тягового модуля по указанным выше причинам.
Известно, что выходная и, соответственно, удельная мощность мехатронного тягового модуля возрастает с увеличением скорости вращения его ротора. Это обусловлено тем, что выходная механическая мощность тягового модуля определяется как произведение скорости вращения ротора на выходной вращающий момент электрической машины. Однако максимальная рабочая скорость ротора ограничена безопасностью работы тягового модуля, поскольку запас кинетической энергии вращающегося ротора пропорционален квадрату скорости его вращения. Поэтому для обеспечения безопасной работы тягового модуля при высоких скоростях вращения ротора электрической машины путем уменьшения времени остановки ротора и, соответственно, для получения высокой удельной мощности тягового модуля, в альтернативных технических решения (р), (т) и (у) используется тормозной резистор или механический тормоз, обеспечивающие возможность гашения кинетической энергии вращающегося ротора и быстрой остановки ротора в аварийных ситуациях.
Отличительные признаки независимого пункта формулы изобретения, реализуемые в их любом сочетании, характеризуют различные варианты указанных способов и путей повышения удельной мощности мехатронного тягового модуля и, соответственно, находятся в прямой причинно-следственной связи с достижением одного и того же технического результата.
Из уровня техники неизвестно использование технических решений, характеризующихся этими отличительными признаками, с целью повышения удельной мощности мехатронного тягового модуля.
Их влияние на достижение этого технического результата дополнительно показано далее в тексте при описании различных вариантов реализации предложенного устройства.
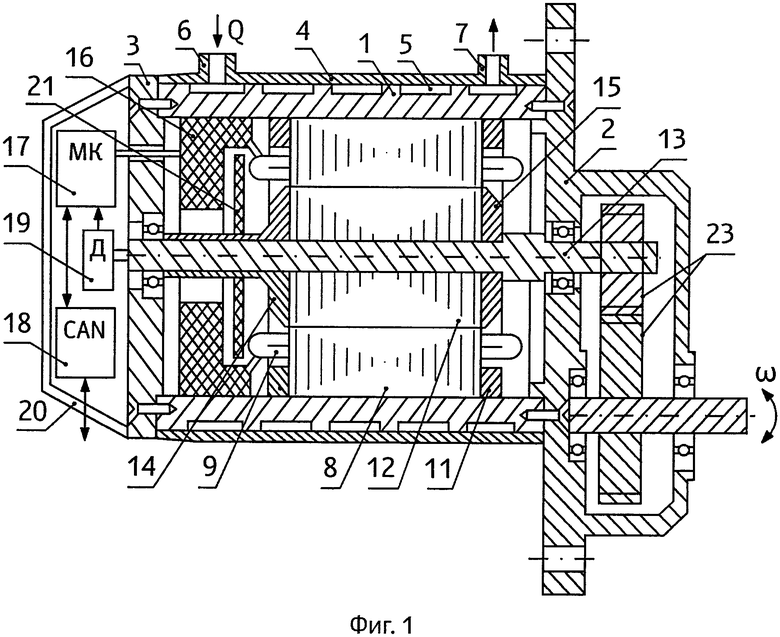
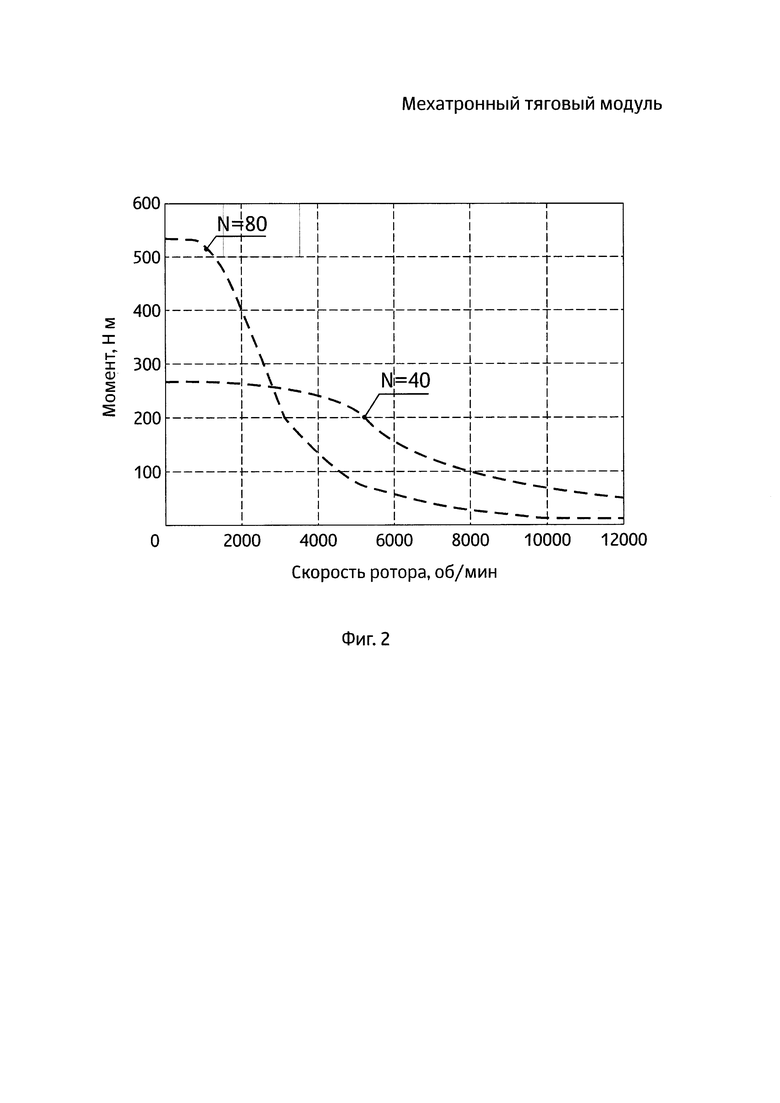
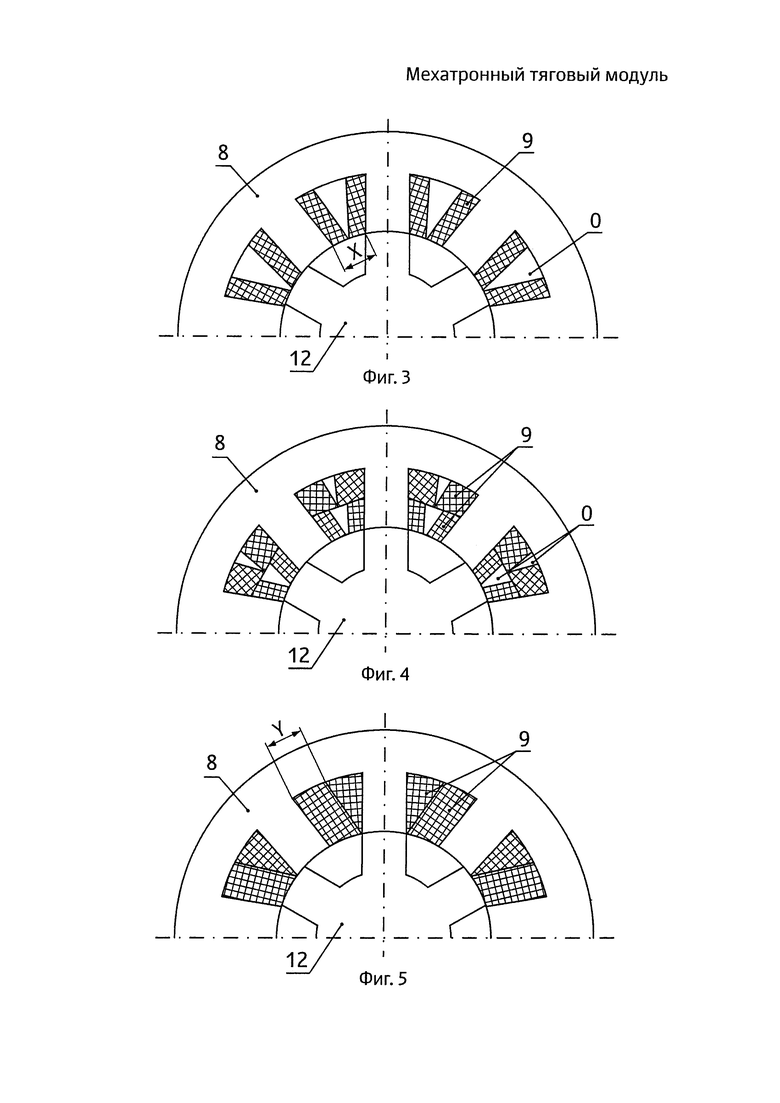
На фиг. 1 представлена упрощенная схема одного из возможных вариантов конструктивного исполнения мехатронного тягового модуля. На фиг. 2 - пример зависимости момента вентильно-индукторной электрической машины от скорости вращения ее ротора, на фиг. 3, 4 и 5 - расположение обмоток на полюсах статора.
Мехатронный тяговый модуль содержит корпус 1, который может именоваться также остовом или станиной, подшипниковые щиты 2, 3 и наружный кожух 4, между которыми по спирали расположен канал 5 с охлаждающей жидкостью Q, которая подводиться к тяговому модулю и отводится от него через патрубки (штуцеры) 6, 7.
Электрическая машина содержит сердечник статора 8, шихтованный из листов электротехнической стали, закрепленный в корпусе 1 с использованием нажимных шайб 10, 11, удерживающих его листы в запрессованном состоянии, обмотки статора 9 и сердечник ротора 12, выполненный из листовой стали той же марки, что и статор, и насаженный непосредственно на вал 13 ротора. Сердечник 12 крепится на валу 13 с помощью шпонки. В запрессованном состоянии листы сердечника ротора 12 удерживают напрессованные нажимные шайбы 14, 15.
По своей конструкции электрическая машина может быть вентильно-индукторной (вентильной реактивной, вентильной индукторно-реактивной) без постоянных магнитов и обмоток на роторе 12, синхронной с постоянными магнитами на роторе или асинхронной. Предпочтительно применение электрической машины с классом нагревостойкости изоляции не ниже, чем 155°С (класс F по ГОСТ 8865 и IEC 62114), и либо без постоянных магнитов, либо с постоянными магнитами, имеющими максимальную рабочую температуру не менее 150°С.Предпочтительно также применение электрической машины, конструктивное исполнение которой обеспечивает минимальное выделение тепла на роторе 12. К ним относятся, в частности, вентильно-индукторные электрические машины, именуемые в зарубежной технической литературе как «Switched Reluctance Motor» (SRM).
Силовой преобразователь, содержит силовые транзисторы и диоды в дискретном исполнении и/или объединенные в транзисторно-диодные (диодно-транзисторные) модули 16, которые непосредственно или через дополнительные теплопроводящие и/или электроизоляционные элементы прикреплены или прижаты к внутренней поверхности корпуса 1 и/или подшипникового щита 3 с обеспечением их теплового контакта с этим корпусом или подшипниковым щитом. При таком креплении возможно частичное использование объема между лобовыми частями обмоток 9 статора 8 и корпусом 1, что приводит к сокращению длины корпуса 1 и, соответственно, объема мехатронного тягового модуля (увеличение его удельной тяговой мощности).
Поверхность корпуса или подшипникового щита, к которой прикреплены или прижаты силовые транзисторы и/или транзисторно-диодные модули, по своей форме совпадает с теплопередающими поверхностями силовых транзисторов и/или транзисторно-диодных модулей, либо теплопроводящих элементов их крепления, например, алюминиевых оснований (радиаторов).
Если силовые транзисторы и/или транзисторно-диодные модули прикреплены или прижаты к внутренней или наружной поверхности подшипникового щита 3, то это подшипниковый щит содержит каналы жидкостного охлаждения, которые, в частности, соединены с каналами жидкостного охлаждения силовых транзисторов и/или транзисторно-диодных модулей.
Силовые транзисторы и/или транзисторно-диодные модули 16 могут быть также непосредственно и/или через дополнительные теплопроводящие и/или электроизоляционные элементы прикреплены или прижаты к спинке статора 8 или к его нажимной шайбе 10. В этом случае на поверхность корпуса 1, спинки статора 8 или нажимной шайбы 10 статора, соприкасающиеся с силовыми транзисторами, транзисторно-диодными модулями 16 или с промежуточными теплопроводящими и/или электроизоляционными элементами, может быть нанесен теплопроводный компаунд, обеспечивающий снижения теплового сопротивления за счет заполнения неровностей соприкасающихся поверхностей.
Силовые транзисторы, например биполярные транзисторы с изолированным затвором (анг. IGBT - Insulated-gate bipolar transistor) и диоды, в частности объединенные в транзисторно-диодные модули 16, через драйверы силовых транзисторов соединены с программируемым микропроцессорном контроллером 17.
Драйверы силовых IGBT транзисторов выполнены, преимущественно, с реализацией функции защиты силовых IGBT транзисторов от перегрузки. Они формируют сигналы неисправностей этих транзисторов и соединенных с ними обмоток электрической машины, а также имеют гальваническую развязку сигналов управления силовыми транзисторами и сигналов неисправностей, поступающих на программируемый микропроцессорный контроллер 17.
Программируемый микропроцессорный контроллер (микроконтроллер) 17 приспособлен для реализации сенсорного или бессенсорного управления электрической машиной и обеспечивает, в общем случае, прием сигналов с датчика положения ротора и с датчиков тока в обмотках, контроль напряжения на обмотках электрической машины, прямое цифровое управление драйверами силовых IGBT транзисторов, а также решение задач общего назначения в системе, в которой используется мехатронный тяговый модуль (в электрической трансмиссии). Ресурсов микроконтроллера должно быть достаточно для поддержки реализуемых алгоритмов управления электрической машиной при работе мехатронного тягового модуля в составе трансмиссии. Программируемый микропроцессорный контроллер 17 может содержать, в частности, ядро ARM, Flash-память программ, встроенные высокоскоростные аналого-цифровые преобразователи (АЦП) и модули формирования широтно-модулированных сигналов (ШИМ), реализованные на основе многоканального таймера. Он обеспечивает быстрый захват сигналов с датчиков и ответ на изменения контролируемых параметров в реальном масштабе времени.
Программируемый микропроцессорный контроллер 17 выполнен, предпочтительно, в виде или на основе специализированного программируемого цифрового сигнального процессора, предназначенного для цифрового управления электрическими машинами.
Поскольку информация о положении ротора электрической машины относительно статора представлена в виде двоичного кода датчика положения ротора (ДПР), для формирования необходимых сигналов управления коммутацией обмоток статора программируемый микропроцессорный контроллер 17 реализует алгоритм логического преобразования сигналов ДПР в сигналы управления драйверами силовых IGBT транзисторов, записанный в его Flash-памяти программ. Этот алгоритм может быть представлен, в частности, в виде матрицы управления силовыми транзисторами.
Для регулирования выходного момента электрической машины микропроцессорный контроллер 17 осуществляет изменение величины тока в обмотках статора путем изменения длительности включения этих обмоток, либо широтно-импульсной модуляции сигналов управления драйверами силовых IGBT транзисторов. В простейшем случае это осуществляется путем отключения силовых IGBT транзисторов в моменты времени, в которые величины токов в обмотках достигают заданной величины.
Для увеличения/уменьшения скорости вращения ротора электрической машины осуществляется соответственно увеличение/уменьшение ее крутящего момента до момента времени, при котором скорость вращения ротора увеличится/уменьшится до заданной величины.
Для обмена данными с мехатронным тяговым модулем, в том числе для приема сигналов управления и передачи сигналов о параметрах и режимах его работы, используется встроенное в программируемый микропроцессорный контроллер 17 или подключенное к нему устройство ввода/вывода информации 18, реализующее обмен этими данными по проводному LIN (Local Interconnect Network - интерфейс для автомобильных систем), J1850 (SAE), CAN (Controller Area Network), CarLink, VAN, A-bus, RS-232C (COM - порт), RS-232, RS-485 (Recommended Standard 485, «токовая петля», MIDI, MicroLAN, Ethernet, USB и т.д., или беспроводному Wi-Fi, Bluetooth, ZigBee, GSM, CDMA и т.д. протоколу (спецификации, стандарту).
Контроль положения вала 13 (ротора 12) осуществляется с помощью датчика положения 19, например, магнитного энкодера, соединенного с программируемым микропроцессорном контроллером 17.
Программируемый микропроцессорный контроллер 17, устройство ввода/вывода информации 18 и датчик положения ротора 19 могут быть расположены как внутри корпуса 1, так и за подшипниковым щитом 3 под защитным кожухом 20.
В цепи питания мехатронного тягового модуля установлен фильтр, образованный конденсаторами, подключенными к плюсовому и минусовому выводам силового преобразователя, и расположенный внутри корпуса 1 или защитного кожуха 20 (на чертеже условно не показан).
Силовой преобразователь и программируемый микропроцессорный контроллер размещены в корпусе 1 вдоль оси электрической машины за ее статором 8 и могут быть отделены от этого статора теплоизоляционной перегородкой или прокладкой 21.
Мехатронный тяговый модуль может содержать тормозной резистор, расположенный внутри корпуса 1 или защитного кожуха 20, встроенный электромагнитный дисковый тормоз, соединенный с валом 13 (на чертеже условно не показан), и редуктор 22, выполненный прецессионным, цилиндрическим, коническим или планетарным с внутренним или внешним зацеплением колес, имеющих эвольвентную, или круговую (передача Новикова), или циклоидальную форму профиля их зубьев. Этот редуктор выполнен, в частности, самотормозящейся.
Управление встроенным тормозом осуществляется от программируемого микропроцессорного контроллера 17 и дополнительного ключа, конструктивно отделенного от силового преобразователя или входящего в его состав.
Для реализации встроенного тормоза электрическая машина может быть выполнена с коническими ротором и статором. В этом случае при подаче напряжения на обмотки 9 статора 8 ротор втягивается в статор, преодолевая усилие пружины, и перемещается вдоль оси 13, что приводит к отключению тормоза в рабочем состоянии электрической машины.
Если электрическая машина выполнена вентильно-индукторной с независимым возбуждением, то ее обмотка возбуждения может использоваться для управления включением/отключением тормоза. В этом случае при подаче напряжения на обмотку возбуждения создаваемый ею магнитный поток приводит к перемещению приводных элементов встроенного фрикционного тормоза (на чертеже условно не показан).
Электрическая машина может быть оснащена также крыльчаткой вентилятора, прикрепленной к валу 13 и обеспечивающей принудительную циркуляцию охлаждающего воздуха внутри мехатронного тягового модуля и, соответственно, снижение температуры ее наиболее нагретых элементов (на чертеже условно не показана).
Мехатронный тяговый модуль может также содержать датчики температуры обмоток статора или иных частей электрической машины, температуры транзисторов или транзисторно-диодных модулей, температуры охлаждающей жидкости, тока в цепи питания силового преобразователя и в обмотках (фазах, полюсах) электрической машины и другие датчики, соединенные с программируемым микропроцессорным контроллером 17.
Работа устройства осуществляется следующим образом.
Сигнал управления через устройство ввода/вывода информации 18, например, через драйвер CAN шины, поступает на программируемый микропроцессорный контроллер 17, который в соответствии сигналами датчика положения ротора 19, работая по программе, записанной в его памяти, формирует сигналы на драйверы силовых IGBT транзисторов, объединенных, в частности, в транзисторно-диодные модули 16. Эти драйверы, в соответствии с импульсами управления, формируют напряжение на управляющих электродах силовых IGBT транзисторов, обеспечивая их включение/выключение в соответствующие моменты времени. Силовые транзисторы попеременно подключают фазные обмотки 9 электрической машины через силовые шины к клеммам питания, обеспечивая протекание тока по фазным обмоткам 9 и, как следствие, возникновение вращающего момента между статором 8 и ротором 12.
Под действием этого момента ротор 12 начинает вращаться, приводя во вращение, через механическую передачу 23 (при ее наличии) колеса или гусеницы транспортной или тяговой машины или иные механизмы.
Для ограничения токов в тяговом режиме программируемый микропроцессорный контроллер 17, в зависимости от скорости вращения и угла поворота ротора 12, формирует широтно-импульсные (ШИМ) сигналы управления силовыми IGBT транзисторами силового преобразователя. Дополнительно, на основании сигналов датчика потребляемого тока силового преобразователя или датчиков тока фазных или полюсных обмоток 9, программируемый микропроцессорный контроллер 17 вычисляет крутящий момент электрической машины и через устройство ввода/вывода информации 18 передает его на внешнее управляющее устройство вместе с сигналом скорости ротора 12 и другими параметрами работы мехатронного тягового модуля.
Если электрическая машина имеет более одной пары полюсов в каждой из ее фаз, то программируемый микропроцессорный контроллер 17 может обеспечивать отключение отдельных пар полюсов и/или поочередное включение пар полюсов каждой фазы при малой величине нагрузки электрической машины. Контроль этой нагрузки осуществляется через измерение тока транзисторов силового преобразователя. При этом функциональная зависимость нагрузки и, соответственно, крутящего момента электрической машины, предварительно определена и записана в энергонезависимую память микропроцессорного контроллера 17.
Для обеспечения возможности широтно-импульсного регулирования тока в обмотках или секциях обмоток полюсов статора в противофазе или со сдвигом времени включения силовых транзисторов во всем диапазоне скоростей вращения ротора электрической машины, силовой преобразователь, программируемый микропроцессорный контроллер и датчик положения ротора (ДПР) должны иметь необходимый уровень быстродействия, обеспечивающий возможность своевременного включения/отключения этих транзисторов.
Для управления встроенным электромагнитным тормозом в состав мехатронного тягового модуля входит дополнительный силовой электронный ключ, конструктивно разделенный или совмещенный с силовым преобразователем и выполненный, например, на основе IGBT транзистора, вход которого соединен с одним из выходов программируемого микропроцессорного контроллера 17, а выход - с обмоткой управления тормоза, имеющей, в частности, жидкостное охлаждение (с целью уменьшения размеров тормоза и, соответственно, мехатронного тягового модуля в целом). Сигнал управления этим тормозом формируется, в частности, после выявления микропроцессорным контроллером нулевой скорости вращения ротора 12.
Задача повышения удельной мощности мехатронного тягового модуля, в зависимости от вариантов его реализации, решается различными способами. В нем может быть реализован один из альтернативных признаков формулы изобретения, либо одновременно несколько признаков в любом сочетании, что приводит к достижению одного и того же технического результата.
Например, может быть реализован мехатронный тяговый модуль, в котором реализован отвод тепла одновременно от статора 8 электрической машины и от силовых транзисторов или транзисторно-диодных модулей 16 через корпус и/или подшипниковый щит с жидкостным охлаждением.
В этом случае силовые транзисторы и/или транзисторно-диодные модули прикреплены или прижаты к внутренней поверхности подшипникового щита, корпуса, к спинке статора или к нажимной шайбе статора вблизи статора. Это обеспечивает максимальное сокращение длины корпуса 1 за счет исключения дополнительных деталей для монтажа силовых IGBT транзисторов или транзисторно-диодных модулей, а также исключения дополнительных полостей с охлаждающей жидкостью. Одновременно улучшаются условия охлаждения силовых IGBT транзисторов или транзисторно-диодных модулей за счет минимизации теплового сопротивления между ними и охлаждающей жидкостью, что приводит к повышению тяговой мощности, которая ограничена перегревом отдельных элементов мехатронного тягового модуля. В итоге это приводит к повышению его удельной мощности.
В другом варианте мехатронного тягового модуля, одновременно с реализацией указанных выше альтернативных признаков или независимо от их реализации, силовой преобразователь и программируемый микропроцессорный контроллер, размещены в корпусе 1 вдоль оси электрической машины за ее статором и отделены от лобовых частей обмоток 9 статора, имеющих наиболее высокую температуру, теплоизоляционной перегородкой или прокладкой 21. Защита от перегрева силового преобразователя и программируемого микропроцессорного контроллера дает электрической машине возможность работать при более высокой температуре и, соответственно, повышает тяговую и удельную мощность мехатронного тягового модуля.
В третьем и четвертом вариантах мехатронного тягового модуля обмотка статора состоит из секций, число которых равно или в целое число раз больше числа полюсов статора, либо обмотка каждого полюса статора состоит из отдельных секций. При этом силовой преобразователь и программируемый микропроцессорный контроллер 17 обеспечивают возможность раздельного включения/выключения этих секций и/или или их переключения на последовательное/параллельное соединение.
Разделение обмоток увеличивает число силовых IGBT транзисторов, необходимых для управления электрической машиной. Это не приводит к увеличению размеров силового преобразователя, поскольку суммарный коммутируемый ток остается неизменным. Одновременно применение силовых IGBT транзисторов, имеющих меньшую величину коммутируемого тока, позволяет снизить динамические потери в силовых транзисторах за счет того, что менее сильноточные силовые транзисторы обладают большим быстродействием. Снижение тепловых потерь в силовых транзисторах приводит к увеличению тяговой и удельной мощности мехатронного тягового модуля.
Реализация переключения секций обмоток статора с последовательного соединения на параллельное в зависимости от скорости вращения ротора позволяет повысить выходной момент электрической машины. Обусловлено это тем, что последовательное соединение обеспечивает высокую индуктивность и, соответственно, улучшает работу электрической машины при низких скоростях. Параллельное соединение уменьшает индуктивность, что приводит к увеличению крутящего момента на больших скоростях вращения ротора.
В качестве примера на фиг. 2 приведен пример зависимостей момента вентильно-индукторного электродвигателя (SRM) от скорости вращения его ротора при различных числах витков обмотки статора (N=40 и 80). Из представленных зависимостей следует, что при скорости вращения ротора от 0 до 2700 об/мин, с целью достижения максимального крутящего момента и более высокой удельной мощности мехатронного тягового модуля, обмотки или секции обмоток статора целесообразно соединять последовательно (N=80), а при скорости более 2700 об/мин - параллельно (N=40). Такое переключение можно реализовать с помощью электромагнитных реле, имеющих два переключающих контакта. Управление обмоткой этого реле (управление переключением) осуществляется от программируемого микропроцессорного контроллера 17.
Раздельное управление обмотками или секциями обмоток позволяет также увеличить крутящий момент электрической машины и удельную мощность мехатронного тягового модуля при отказах отдельных обмоток или их секций, поскольку в этом случае происходит не отключение, в лишь снижение крутящего момента, создаваемого каждой парой полюсов.
Это техническое решение также может быть реализовано как отдельно, так и в сочетании с реализацией других альтернативных признаков изобретения.
В еще одном варианте реализации предложенного технического решения силовой преобразователь и программируемый микропроцессорный контроллер обеспечивают отключение отдельных пар полюсов или поочередное включение различных пар полюсов каждой фазы в зависимости от величины нагрузки электрической машины. Перевод отдельных силовых IGBT транзисторов в нерабочее состояние при небольшой величине нагрузки электрической машины позволяет снизить динамические потери на переключение в силовом преобразователе и, соответственно, температуру электрической машины. Реализация такого управления оправдано в том случае, если динамические потери на переключения больше, чем статические потери в других силовых IGBT транзисторах, которые в случае такого отключения осуществляют коммутацию тока удвоенной величины. Данное техническое решение обеспечивает повышение удельной мощности мехатронного тягового модуля в динамических режимах его работы.
Если электрическая машина выполнена вентильно-индукторной (SRM), то самостоятельно (независимо от реализации указанных выше альтернативных признаков), либо в дополнение к ним, может быть предусмотрено применение сосредоточенных обмоток (катушек) статора различной формы.
Сосредоточенные обмотки (катушки) статора 9 в таких электрических машинах традиционно выполняют одинаковыми, а их ширина равна минимальному расстоянию X между зубцами (полюсами) статора 8, поскольку в противном случае катушки 9, изготовленные отдельно, не могут быть надеты на зубцы (полюса) статора 8. Это приводит к появлению пространства О, не занятого обмотками (фиг. 3).
Согласно одному из предложенных альтернативных признаков изобретения, сосредоточенные обмотки (катушки) каждого полюса статора состоят не менее, чем из двух секций, при этом секция, расположенная у спинки статора, имеет увеличенную ширину (фиг. 4). В этом случае катушки 9 имеют различную ширину, а свободное пространство О, не занятое обмоткам, сокращается (фиг. 4). Это приводит к увеличению коэффициента заполнения окна между полюсами (зубцами) статора медью.
Сосредоточенные обмотки (катушки) соседних полюсов статора могут также иметь равные площади сечений, но различные формы, выбранные из условия максимального заполнения медью промежутка между полюсами статора (фиг. 5). В этом случае катушка с трапецеидальным сечением, имеющая ширину Y, не превышающую расстояние X между зубцами, при сборке электрической машины устанавливается первой.
Такое исполнение катушек 9 позволяет увеличить сечение провода обмоток и, соответственно, снизить потери в них. Это также приводит к повышению мощности электрической машины и удельной мощности мехатронного тягового модуля.
Еще одним вариантом снижения потерь в мехатронном тяговом модуле и, соответственно, увеличения его удельной мощности, является реализация широтно-импульсного регулирования тока в обмотках или секциях обмоток одной пары и/или различных пар полюсов либо в противофазе, либо со сдвигом времени включения силовых транзисторов. Это позволяет снизить потери в силовых шинах мехатронного тягового модуля за счет уменьшения амплитуды пульсаций тока в них.
Следующим вариантом реализации мехатронного тягового модуля является применение драйверов силовых IGBT транзисторов с функцией контроля исправности этих транзисторов и/или соединенных с ними обмоток, а также отключение сигналов управления неисправных силовых транзисторов, либо тех силовых транзисторов, с которыми соединены неисправные обмотки. Это дает возможность исключить потери энергии в неисправных компонентах мехатронного тягового модуля. Данное техническое обеспечивает также меньшее снижение мощности электрической машины при отказе отдельных компонентов мехатронного тягового модуля, что приводит к увеличению его удельной мощности
Применение гальванической развязки сигналов управления и/или сигналов неисправности позволяет уменьшить величины зазоров между элементами низковольтной части мехатронного тягового модуля и его корпусом 1, применить соединительные проводники с меньшей толщиной изоляции и т.п., что сокращает габаритные размеры мехатронного тягового модуля и, соответственно, повышает его удельную мощность.
Среднее значение тяговой мощности мехатронного модуля ограничивается рядом его параметров, в том числе максимальной выходной мощностью электрической машины в динамических режимах работы, максимальным выходным моментом и максимальной температурой электрической машины, максимальной температурой охлаждающей жидкости или максимальной скоростью вращения (прочностью) ротора. Контроль или измерение текущих значений этих параметров, предварительная запись их предельно-допустимых значений в программируемый микропроцессорный контроллер, а также последующее управление силовыми IGBT транзисторами таким образом, чтобы величина контролируемого или измеряемого параметра не превышала его предварительно установленную предельно-допустимую величину, обеспечивает максимальное использование рабочих зон мехатронного тягового модуля, позволяет установить режимы работы, максимально близкие к установленным ограничениям. Это приводит к повышению тяговой мощности и, соответственно, удельной мощности мехатронного тягового модуля.
Этот же результат и по тем же причинам достигается в следующем варианте реализации мехатронного тягового модуля, в котором программируемый микропроцессорный контроллер осуществляет контроль или измерение нагрузки электрической машины и скорости вращения ее ротора и далее управляет силовыми IGBT транзисторами из условия поддержания установленной величины выходной мощности электрической машины путем увеличения/уменьшения скорости вращения ее ротора при уменьшении/увеличении указанного момента.
Если через устройство ввода/вывода информации поступает сигнал об установке заданной скорости вращения ротора, то программируемый микропроцессорный контроллер 17 управляет силовыми транзисторами из условия поддержания этой скорости, если момент нагрузки не превышает максимальный выходной момент электрической машины при заданной скорости вращения ротора, либо из условия поддержания выходной мощности электрической машины путем увеличения/уменьшения скорости вращения до приведения в соответствие момента нагрузки и максимального выходного момента электрической машины. При таком управлении достигается максимально возможное среднее значение тяговой и, соответственно, удельной мощности мехатронного тягового модуля.
В отдельных случаях возможно программное управление электрической машиной. В этом случае программа управления силовыми IGBT транзисторами предварительно записана в память программируемого микропроцессорного контроллера и предусматривает реализацию зависимости скорости или выходного момента электрической машины от времени, обеспечивающую, например, достижение максимально возможной средней выходной мощности в интервале времени, в котором реализуется эта зависимость. Возможным вариантом такого алгоритма является управление из условия достижения максимально-допустимой температуры электрической машины к завершению программы ее работы. Это техническое решение также обеспечивает повышение средней тяговой мощности и, соответственно, удельной мощности мехатронного тягового модуля.
В отдельный случаях максимальная мощность мехатронного тягового модуля ограничена максимальной скоростью его выходного звена, установленной из условия обеспечения безопасности работы приводного механизма. В частности, в тех случаях, когда необходимо обеспечить относительное небольшое гарантированное время его остановки. В этих случаях мехатронный тяговый модуль может быть оснащен встроенной понижающей зубчатой передачей, позволяющей повысить скорость вращения ротора электрической машины и, соответственно, уменьшить ее размеры. При этом для выполнения требований по безопасности (времени остановки ротора) эта передача выполнена самотормозящейся или оснащена тормозом, управление которым осуществляется с помощью программируемого микропроцессорного контроллера и силового преобразователя. Поскольку за счет увеличения рабочих скоростей ротора, несмотря на дополнительную установку зубчатой передачи и тормоза, обеспечивается уменьшение суммарного объема мехатронного тягового модуля, это техническое решение также обеспечивает повышение его удельной мощности.
При наличии установленных требований к времени остановки выходного звена (вала) мехатронного тягового модуля, еще в одном варианте его реализации установлен тормозной резистор, управляемый дополнительно введенным силовым электронным ключом, конструктивно разделенным или совмещенным с силовым преобразователем и соединенным с программируемым микропроцессорным контроллером. В этом случае в режиме торможения электрическая машина переводится программируемым микропроцессорным контроллером в режим генератора, а кинетическая энергия приводного механизма поглощается тормозным резистором. Благодаря этому установленное время остановки (торможения) мехатронного тягового модуля обеспечивается при более высоких скоростях вращения ротора. Поскольку габаритные размеры электрической машины заданной мощности существенно сокращаются при увеличении скорости ее ротора, реализация данного альтернативного признака изобретения также приводит к увеличению удельной мощности мехатронного тягового модуля.
Электрическое торможение электрической машины может быть заменено на механическое. В этом случае мехатронный тяговый модуль содержит встроенный дисковый электромагнитный тормоз, управление которым может осуществляться различными способами. В частности, тормоз может иметь управление от программируемого микропроцессорного контроллера и дополнительно установленного электронного силового ключа.
В случае использованию конической формы ротора и статора тормоз может отключаться автоматически при подаче напряжения на статор.
Для управления встроенным тормозом может также использоваться обмотка возбуждения вентильно-индукторной электрической машины.
Для того, чтобы применение встроенного тормоза приводило к более значительному увеличению удельной мощности мехатронного тягового модуля, обмотка этого тормоза, с целью уменьшения габаритных размеров тормоза и мехатронного модуля в целом, может иметь жидкостное охлаждение.
Возможен также вариант реализации в мехатронном тяговом модуле беспроводного приема/передачи сигналов управления этим тяговым модулем и сигналов о его техническом состоянии и параметрах работы. В этом случае устройство приема/передачи сигналов 18 выполняется в виде приемопередатчика радиосигналов.
Известно, что микросхемы приемопередатчиков радиосигналов и драйверов проводных линий связи, например, шины CAN, имеют примерно равные габаритные размеры. В то же время проводной интерфейс требует установки устройств защиты линии от перенапряжений и электрического разъема. Суммарно они имеют больший объем чем, например, керамическая антенна на частоту 2,4 ГГц. Поэтому применение беспроводного обмена данными с программируемым микропроцессорным контроллером 17 приводит к некоторому (небольшому) снижению объема мехатронного тягового модули и, соответственно, к повышению его удельной мощности. Это техническое решение также может быть реализовано отдельно или в сочетании с реализацией других альтернативных признаков изобретения.
Еще в одном варианте реализации мехатронного тягового модуля электрическая машина, входящая в его состав, выполнена без использования постоянных магнитов и с классом нагревостойкости изоляции обмоток не ниже, чем 150°С, а силовой преобразователь и программируемый микропроцессорный контроллер - с использованием компонентов, имеющих рабочую температуру не менее, чем 100°С. Повышение рабочей температуры отдельных компонентов мехатронного тягового модуля, с учетом наличия ограничений на его КПД и эффективность системы жидкостного охлаждения, приводит к увеличению тяговой и удельной мощности мехатронного тягового модуля.
Наивысшее значение удельной мощности может быть получено при одновременной реализации всех альтернативных признаков изобретения. Однако улучшение этого показателя (достижение указанного технического результата) достигается при реализации как одного из альтернативных отличительного признаков изобретения, так и нескольких признаков одновременно в их любом сочетании.
Для специалистов в данной области техники понятно, что кроме описанных вариантов мехатронного тягового модуля возможны также иные варианты его реализации на основе признаков, изложенных в формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА СО ВСТРОЕННЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2018 |
|
RU2689380C1 |
| ВЕНТИЛЬНО-ИНДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С ПЕРЕКЛЮЧАЕМЫМИ ФАЗНЫМИ ОБМОТКАМИ | 2018 |
|
RU2698464C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА СО ВСТРОЕННЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2017 |
|
RU2656866C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ МАШИНЫ С ДВИГАТЕЛЕМ ВНУТРЕННЕГО СГОРАНИЯ | 2017 |
|
RU2648652C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ САМОХОДНОЙ МАШИНЫ | 2014 |
|
RU2550408C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ САМОХОДНОЙ МАШИНЫ | 2015 |
|
RU2605957C1 |
| ИНДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2017 |
|
RU2662233C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ САМОХОДНОЙ МАШИНЫ | 2017 |
|
RU2648660C1 |
| ГУСЕНИЧНЫЙ ТРАКТОР-ТЯГАЧ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2019 |
|
RU2726350C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ САМОХОДНОЙ МАШИНЫ С ДВИГАТЕЛЕМ ВНУТРЕННЕГО СГОРАНИЯ | 2018 |
|
RU2688563C1 |
Изобретение относится к электрическим тяговым системам транспортных средств. Мехатронной тяговый модуль содержит корпус с жидкостным охлаждением, в котором расположены электрическая машина и силовой преобразователь, выполненный с использованием дискретных IGBT транзисторов и диодов и/или транзисторно-диодных модулей. Программируемый микропроцессорный контроллер выполнен с возможностью обеспечивать прием сигналов управления и соединен с драйверами и датчиком положения ротора. Фильтр, содержащий конденсаторы, подключен к выводам силового преобразователя. Дополнительно, в зависимости от варианта реализации тягового модуля, транзисторно-диодные модули прикреплены или прижаты к внутренней поверхности корпуса, к подшипниковому щиту или к спинке статора. Технический результат изобретения заключается в повышение удельной мощности мехатронного тягового модуля. 11 з.п. ф-лы, 5 ил.
1. Мехатронный тяговый модуль, содержащий корпус с жидкостным охлаждением, подшипниковые щиты, ротор электрической машины, статор электрической машины, содержащий обмотки и закрепленный внутри корпуса с возможностью передачи тепла на этот корпус, датчик положения ротора, силовой преобразователь, соединенный с обмотками статора и выполненный с использованием дискретных силовых транзисторов и диодов и/или объединенных в транзисторно-диодные модули, драйверы силовых транзисторов, программируемый микропроцессорный контроллер, приспособленный для приема сигналов управления мехатронным тяговым модулем и соединенный с драйверами и датчиком положения ротора, и фильтр, содержащий конденсаторы, подключенные к плюсовому и минусовому выводам силового преобразователя, причем в мехатронном тяговом модуле дополнительно реализовано по меньшей мере одно из следующих технических решений:
а) силовые транзисторы и/или транзисторно-диодные модули непосредственно и/или через дополнительные теплопроводящие и/или электроизоляционные элементы прикреплены или прижаты к внутренней и/или наружной поверхности корпуса и/или по меньшей мере одного подшипникового щита с возможностью передачи тепла на этот корпус и/или подшипниковый щит;
б) силовые транзисторы и/или транзисторно-диодные модули непосредственно и/или через дополнительные теплопроводящие и/или электроизоляционные элементы прикреплены или прижаты к спинке статора или к нажимной шайбе статора с возможностью передачи тепла на эту спинку или нажимную шайбу;
в) силовой преобразователь, и/или программируемый микропроцессорный контроллер, и/или фильтр размещен/размещены в корпусе между подшипниковым щитом и спинкой статора и/или обмотками статора, а также отделены от этой спинки и/или от этих обмоток теплоизоляционной перегородкой или прокладкой;
г) обмотка статора состоит из секций, а силовой преобразователь и программируемый микропроцессорный контроллер выполнены с возможностью раздельного включения/выключения этих секций и/или с возможностью переключения этих секций с последовательного соединения на параллельное и обратно в зависимости от скорости вращения ротора электрической машины;
д) обмотка каждого полюса статора состоит из секций, а силовой преобразователь и программируемый микропроцессорный контроллер выполнены с возможностью переключения этих секций с последовательного соединения на параллельное и обратно в зависимости от скорости вращения ротора;
е) электрическая машина имеет более одной пары полюсов в каждой из ее фаз, а силовой преобразователь и программируемый микропроцессорный контроллер выполнены с возможностью измерения нагрузки электрической машины и последующего отключения отдельных пар полюсов и/или поочередного включения пар полюсов каждой фазы в зависимости от величины этой нагрузки;
ж) сосредоточенные обмотки каждого полюса статора состоят не менее чем из двух секций, при этом секция, расположенная у спинки статора, имеет увеличенную ширину, выбранную из условия максимального заполнения медью промежутка между полюсами статора с возможностью осуществления сборки электрической машины путем первоочередной установки на полюс магнитопровода статора секции сосредоточенной обмотки, имеющей увеличенную ширину;
з) силовой преобразователь и программируемый микропроцессорный контроллер выполнены с возможностью широтно-импульсного регулирования тока в обмотках или секциях обмоток одной пары и/или пар полюсов в противофазе или со сдвигом времени включения силовых транзисторов;
и) драйвер по меньшей мере одного силового транзистора приспособлен для формирования сигнала неисправности этого транзистора и/или соединенной с ним обмотки, а программируемый микропроцессорный контроллер выполнен с возможностью отключения этого транзистора при поступлении на него указанного сигнала;
к) драйверы оснащены средствами гальванической развязки сигналов управления силовыми транзисторами и/или сигналов неисправности этих транзисторов и/или соединенных с ними обмоток;
л) программируемый микропроцессорный контроллер выполнен с возможностью измерения выходной мощности, или выходного момента, или температуры электрической машины, или температуры охлаждающей жидкости, или скорости вращения ротора, а также приспособлен для формирования сигналов управления силовыми транзисторами таким образом, чтобы величина контролируемого или измеряемого параметра не превышала его предварительно установленную величину, предварительно записанную в память программируемого микропроцессорного контроллера или принятую этим контроллером в процессе управления мехатронным тяговым модулем;
м) программируемый микропроцессорный контроллер выполнен с возможностью измерения момента нагрузки электрической машины и скорости вращения ротора, а также приспособлен для формирования сигналов управления силовыми транзисторами из условия поддержания заданной скорости вращения ротора, если момент нагрузки не превышает максимальный выходной момент электрической машины при заданной скорости вращения ротора, либо из условия поддержания выходной мощности электрической машины путем увеличения/уменьшения скорости вращения ее ротора при уменьшении/увеличении момента нагрузки до достижения равенства момента нагрузки и максимального выходного момента электрической машины;
н) программируемый микропроцессорный контроллер выполнен с возможностью формирования сигналов управления силовыми транзисторами из условия реализации зависимости выходного момента электрической машины от времени, предварительно записанной в память программируемого микропроцессорного контроллера;
о) мехатронный тяговый модуль содержит встроенный прецессионный редуктор или редуктор с внутренним или внешним зацеплением зубчатых колес, имеющих круговую (передача Новикова), или циклоидальную форму профиля их зубьев;
п) мехатронный тяговый модуль содержит встроенный дисковый электромагнитный тормоз, включаемый пружинами, причем обмотка электромагнита этого тормоза размещена на подшипниковом щите или прикреплена к нему, а силовой преобразователь содержит дополнительный силовой электронный ключ электромагнитного тормоза, соединенный с программируемым микропроцессорным контроллером и приспособленный для управления включением/отключением этого тормоза;
р) мехатронный тяговый модуль содержит встроенный дисковый электромагнитный тормоз, включаемый пружинами, а электрическая машина выполнена с независимым возбуждением, причем обмотка возбуждения соединена с силовым преобразователем или дополнительным силовым электронным ключом, приспособленным для управления током возбуждения электрической машины, и дополнительно приспособлена для управления включением/отключением встроенного электромагнитного тормоза;
с) программируемый микропроцессорный контроллер дополнительно оснащен средством беспроводного приема сигналов управления мехатронным тяговым модулем и/или беспроводной передачи сигналов о параметрах его работы и/или технического состояния;
т) обмотки статора выполнены с классом нагревостойкости изоляции не ниже чем 150°С, а силовой преобразователь и программируемый микропроцессорный контроллер выполнены с использованием компонентов, имеющих рабочую температуру не менее чем 100°С.
2. Мехатронный тяговый модуль по п. 1, отличающийся тем, что внутренняя поверхность корпуса имеет круглую форму или форму многогранника и приспособлена для размещения силовых транзисторов и/или транзисторно-диодных модулей.
3. Мехатронный тяговый модуль по п. 1, отличающийся тем, что силовые транзисторы и диоды и/или транзисторно-диодные модули размещены в корпусе у спинки статора по меньшей мере с частичным использованием объема между лобовыми частями обмоток статора и корпусом.
4. Мехатронный тяговый модуль по п. 1, отличающийся тем, что силовые транзисторы и диоды и/или транзисторно-диодные модули имеют жидкостное охлаждение и размещены на подшипниковом щите, причем каналы жидкостного охлаждения этих силовых транзисторов и диодов и/или транзисторно-диодных модулей соединены с каналами жидкостного охлаждения подшипникового щита.
5. Мехатронный тяговый модуль по п. 1, отличающийся тем, что он содержит по меньшей мере одно электромагнитное реле, переключающие контакты которого соединены с обмотками или с секциями обмоток статора с возможностью их переключения с последовательного на параллельное соединение, а обмотка реле непосредственно или через драйвер этого реле соединена с программируемым микропроцессорным контроллером, приспособленным для формирования сигналов управления электромагнитным реле в зависимости от скорости вращения ротора таким образом, что низкой скорости вращения соответствует последовательное соединение этих обмоток или секций обмоток.
6. Мехатронный тяговый модуль по п. 1, отличающийся тем, что программируемый микропроцессорный контроллер, выполненный с возможностью формирования сигналов управления силовыми транзисторами при его работе в режиме поддержания тяговой мощности мехатронного тягового модуля, дополнительно приспособлен для изменения поддерживаемой величины тяговой мощности в зависимости от температуры электрической машины.
7. Мехатронный тяговый модуль по п. 1, отличающийся тем, что ротор оснащен крыльчаткой вентилятора, приспособленной для принудительной циркуляции охлаждающего воздуха внутри мехатронного тягового модуля.
8. Мехатронный тяговый модуль по п. 1, отличающийся тем, что обмотка встроенного дискового электромагнитного тормоза имеет жидкостное охлаждение.
9. Мехатронный тяговый модуль по п. 1, отличающийся тем, что встроенный понижающий редуктор выполнен самотормозящимся.
10. Мехатронный тяговый модуль по п. 1, отличающийся тем, что он дополнительно содержит тормозной резистор и силовой электронный ключ тормозного резистора, соединенный с программируемым микропроцессорным контроллером и приспособленный для подключения тормозного резистора к плюсовому и минусовому выводам силового преобразователя.
11. Мехатронный тяговый модуль по п. 1, отличающийся тем, что по меньшей мере один подшипниковый щит выполнен с жидкостным охлаждением.
12. Мехатронный тяговый модуль по п. 1, отличающийся тем, что силовые транзисторы и диоды и/или транзисторно-диодные модули силового преобразователя выполнены с жидкостным охлаждением.
| ТЯГОВЫЙ МЕХАТРОННЫЙ МОДУЛЬ | 2007 |
|
RU2330371C1 |
| СИСТЕМА ОХЛАЖДЕНИЯ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ ЗАКРЫТОГО ИСПОЛНЕНИЯ | 2001 |
|
RU2201647C2 |
| СИСТЕМА ОХЛАЖДЕНИЯ ТЯГОВОГО ПРЕОБРАЗОВАТЕЛЯ ГАЗОТУРБОВОЗА | 2009 |
|
RU2398682C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ САМОХОДНОЙ МАШИНЫ | 2014 |
|
RU2550408C1 |
| CN 203261191 U, 30.10.2013. | |||

