Настоящее изобретение касается установки подвесной канатной дороги с направленным вокруг концевых шкивов несущим и тяговым канатом для подвижного состава, в частности, кресел, с предусмотренным, по меньшей мере, в одном из мест посадки транспортным устройством, с помощью которого пассажиры доставляются в ту зону, в которой они садятся в подвижной состав, со снабженным транспортным устройством входным шлагбаумом, с центральным блоком управления входным шлагбаумом и транспортным устройством, со срабатывающим в результате проезда подвижного состава сигнальным датчиком и с датчиком скорости, с помощью которого можно регистрировать скорость несущего и тягового троса, причем выходные сигналы датчиков подаются в центральный блок управления.
В известных установках подвесных канатных дорог такого типа существует требование открывать входной шлагбаум в тот момент времени, когда пассажиры с помощью транспортного устройства попадают в ту зону, в которой они садятся в подвижной состав, в частности, в кресла, как только в эту зону прибудет подвижной состав. При этом транспортное устройство движется со значительно меньшей скоростью по сравнению с подвижным составом. Однако, поскольку подвижной состав закреплен на несущем и тяговом канате через неравномерные промежутки, управление входным шлагбаумом осуществляется соответственно с помощью того подвижного состава, который предназначен для перевозки находящихся перед входным шлагбаумом пассажиров.
Поскольку скорость несущего и тягового каната не является постоянной, а изменяется в зависимости от технических условий эксплуатации, не существует определенного места, в котором входной шлагбаум должен открываться прибывающим на станцию подвижным составом, чтобы дать возможность пассажирам в нужный момент времени попасть в зону посадки, а это место находится в зависимости от скорости несущего и тягового каната или подвижного состава в зоне, которая может простираться, например, на длине около 100 м. При этом необходимо учитывать, что время реакции пассажиров не зависит от скорости, с которой подвижной состав движется на станции подвесной канатной дороги.
Так как в результате этого то место, в котором должен открываться входной шлагбаум при проезде подвижного состава, чтобы предоставить пассажирам возможность посадки, может находиться за пределами станции подвесной канатной дороги, существует необходимость принятия мер для обеспечения необходимой синхронизации между скоростью подвижного состава, скоростью транспортного устройства и открытием входного шлагбаума.
В соответствии с изобретением это достигается благодаря тому, что предусмотрено измерительное устройство, с помощью которого можно регистрировать те участки пути, которые прошел подвижной состав и вызвал срабатывание сигнального датчика, причем входной шлагбаум может открываться с помощью центрального блока управления в зависимости от выходных сигналов сигнального датчика и измерительного устройства, которое при необходимости действует как датчик скорости.
Предпочтительно измерительное устройство выполнять в виде импульсного датчика.
Предпочтительно сигнальный датчик размещать за пределами станции, причем он может быть расположен на опоре подвесной канатной дороги. В соответствии с предпочтительным вариантом выполнения приводным двигателем транспортного устройства можно также управлять с центрального блока управления. Измерительное устройство может быть образовано с помощью прилегающего к несущему и тяговому канату измерительного ролика. Дополнительно может быть предусмотрен также датчик скорости.
В установке подвесной канатной дороги, в которой находящийся в зоне посадки канатоведущий шкив расположен на передвигаемой натяжной тележке, в соответствии с изобретением может быть кроме того предусмотрен передвигаемый с натяжной тележкой второй сигнальный датчик, который срабатывает при прохождении подвижного состава и выход которого также подключен к центральному блоку управления.
Ниже предмет изобретения поясняется более подробно с помощью представленного на чертеже примера выполнения. Чертеж показывает схематическое изображение станции установки подвесной канатной дороги в соответствии с изобретением.
Как видно из чертежа, несущий и тяговый канат 1 на станции подвесной канатной дороги уложен вокруг концевого шкива 2. На несущем и тяговом канате 1 закреплен подвижной состав, например, кресла 11. В этой зоне несущего и тягового каната 1, в которой пассажиры должны садиться в кресла 11, предусмотрен ленточный транспортер 3, который приводится в действие с помощью приводного двигателя 31 со скоростью, меньшей, чем скорость несущего и тягового каната 1, например, с одной третью скорости. С ленточным транспортером 3 сопряжен входной шлагбаум 4, который должен открываться тогда, когда кресло 11 войдет на станцию, чтобы обеспечить транспортировку пассажиров через входной шлагбаум 4 с помощью ленточного транспортера 3 в ту зону, в которой они могут садиться в кресла 11. Перед входным шлагбаумом 4 находится световой затвор 5.
Для управления всей установкой, в частности, для управления входным шлагбаумом 4, предусмотрен центральный блок управления 6, в который с помощью нескольких датчиков вводятся необходимые для эксплуатации данные.
Это сигнальный датчик 61, который находится в зоне участка движения подвижного состава 11 и с помощью которого по линии 61а затем в центральный блок управления 6 подается сигнал, как только мимо него пройдет подвижной состав 11. Сигнальный датчик 61 может находиться за пределами станции подвесной канатной дороги, причем он, в частности, может быть расположен на опоре подвесной канатной дороги.
Кроме того предусмотрен измерительный ролик 62, который прилегает к несущему и тяговому канату 1 и с помощью которого при каждом обороте по линии 62а в центральный блок управления 6 подается импульс. Так, например, при использовании стандартного ролика соответственно тогда, когда несущий и тяговый канат 1 переместится на 75 мм, в центральный блок управления может быть подан импульс. Тем самым с помощью измерительного ролика 62 осуществляется измерение пути.
Кроме того предусмотрен ролик, который прилегает или к несущему и тяговому канату, или к концевому шкиву и в результате этого проворачивается, и который образует часть тахогенератора 63, благодаря чему измеряется скорость несущего и тягового каната 1. Выход этого действующего в качестве датчика скорости тахогенератора 63 с помощью линии 63а также подключен к центральному блоку управления 6. От светового затвора 5 линия 5а также ведет к центральному блоку управления 6.
От центрального блока управления 6 линия 4а ведет к входному шлагбауму 4 и линия 31а к приводному двигателю 31 ленточного транспортера 3.
Если к тому же концевой шкив 2 имеет натяжную тележку, которая может перемещаться взад и вперед в направлении транспортировки несущего и тягового каната 1, предусмотрен расположенный на этой натяжной тележке второй сигнальный датчик 64, который также активизируется проходящим мимо подвижным составом 11 и его выход с помощью линии 64а также подключен к центральному блоку управления 6.
Перемещение натяжной тележки происходит по причине натяжения несущего и тягового троса 1, которое зависит от климатических условий, нагрузки установки подвесной канатной дороги и удлинения несущего и тягового каната 1.
Если несущий и тяговый канат 1 перемещается с максимальной скоростью, входной шлагбаум 4 открывается тогда, когда кресло 11 переместилось от сигнального датчика 61 на расстояние X1 до места В. Как только откроется входной шлагбаум 4, пассажиры по истечении времени реакции, которое не зависит от скорости несущего и тягового каната 1, по рампе 41 входят на ленточный транспортер 3, с помощью которого они со скоростью, меньшей скорости несущего и тягового каната 1, перемещаются в направлении стрелки A до тех пор, пока кресло сзади не приблизится к ним настолько, чтобы они могли сесть в него. Однако открытие входного шлагбаума 4 происходит только тогда, когда перед ним находятся пассажиры, что контролируется с помощью светового затвора 5.
Если в противоположность этому несущий и тяговый канат 1 движется с меньшей скоростью, то место, в котором находится кресло 11, смещается тогда, когда должен открываться входной шлагбаум 4, по участку X2 до точки C.
Тот участок, который был пройден креслом 11 после прохождения сигнального датчика 61, регистрируется с помощью импульсного датчика 62 и обрабатывается в центральном блоке управления 6. Скорость несущего и тягового каната 1 указывается тахогенератором 63 и также обрабатывается в центральном блоке управления 6. С помощью центрального блока управления 6 на основании этих измеренных величин управление открытием входного шлагбаума 4 и скоростью ленточного транспортера 3 осуществляется таким образом, что пассажиры находятся в зоне посадки в тот момент, когда кресло 11 попадает в эту зону.
Ниже более точно описывается принцип действия этой подвесной канатной дороги.
Как только кресло 11 пройдет мимо первого сигнального датчика 61, от него по линии 61а в центральный блок управления 6 подается сигнал, под действием которого с помощью импульсного датчика 62 осуществляется измерение пути для определения соответствующего положения этого кресла 11. Кроме того с помощью центрального блока управления 6 вычисляется то место В в зоне участка X2, которое должно пройти это кресло 11, чтобы входной шлагбаум 4 открывался в зависимости от скорости несущего и тягового троса 1, измеряемой тахогенератором 63, обеспечить возможность посадки пассажиров в кресло 11 в зоне посадки этого ленточного транспортера 3. Как только кресло достигает этого места, которое определяется при измерении пути с помощью импульсного датчика 62, и кроме того осуществляется индикация световым затвором 5 по линии 5а того, что перед входным шлагбаумом 4 находится по меньшей мере один пассажир, тотчас с центрального блока управления 6 по линии 4а на входной шлагбаум 4 подается сигнал, с помощью которого последний открывается.
Если концевой шкив 2 находится на натяжной тележке, благодаря чему он может перемещаться взад и вперед в направлении транспортировки несущего и тягового каната 1, то в результате прохождения кресла 11 мимо второго сигнального датчика 64 от него по линии 64а в центральный блок управления 6 подается сигнал, с помощью которого в центральный блок управления 6 вводится также положение концевого шкива 2, который может перемещаться по участку X3, благодаря чему также учитывается это смещение при открывании входного шлагбаума 4.
На основании такого расположения осуществляется управление открытием входного шлагбаума 4 соответственно именно тем креслом 11, которое должно быть занято пассажирами, которые находятся перед входным шлагбаумом 4, вследствие чего не имеет значения, через какие промежутки кресла 11 закреплены на несущем и тяговом канате 1. Кроме того можно учитывать скорость несущего и тягового каната 1 и положение концевого шкива 2, если последний находится на натяжной тележке, благодаря чему обеспечивается то, что пассажиры, которые должны занять соответствующие кресла 11, всегда оказываются в зоне посадки, как только это кресло 11 войдет и приблизится к пассажирам сзади.
Даже тогда, когда канатный шкив 2 установлен неподвижно, целесообразно предусматривать второй сигнальный датчик 64, так как он во взаимодействии с первым сигнальным датчиком 61 и импульсным датчиком 62 предназначен для калибровки устройства управления путем определения расстояния X4 между первым сигнальным датчиком 61 и вторым сигнальным датчиком 64. Так как с помощью импульсного датчика 62 можно осуществлять также измерение скорости, необязательно предусматривать датчик скорости 63.
Установка подвесной канатной дороги с направленным вокруг концевых шкивов несущим и тяговым канатом для подвижного состава, с предусмотренным по меньшей мере в одном из мест посадки транспортным устройством, с помощью которого пассажиры доставляются в ту зону, в которой они садятся в подвижной состав, с сопряженным с транспортным устройством входным шлагбаумом, с центральным блоком управления для управления входным шлагбаумом и транспортным устройством, со срабатывающим в результате прохождения мимо подвижного состава сигнальным датчиком и с датчиком скорости несущего и тягового каната, причем выходные сигналы датчиков подаются в центральный блок управления. При этом предусмотрено измерительное устройство для регистрации тех участков пути, которые прошел подвижной состав, вызвавший срабатывание сигнального датчика, причем шлагбаум открывается центральным блоком управления в зависимости от выходных сигналов сигнального датчика и измерительного устройства. Такое выполнение установки обеспечивает необходимую синхронизацию между скоростью подвижного состава, скоростью транспортного устройства и открытием входного шлагбаума. 6 з.п.ф-лы, 1 ил.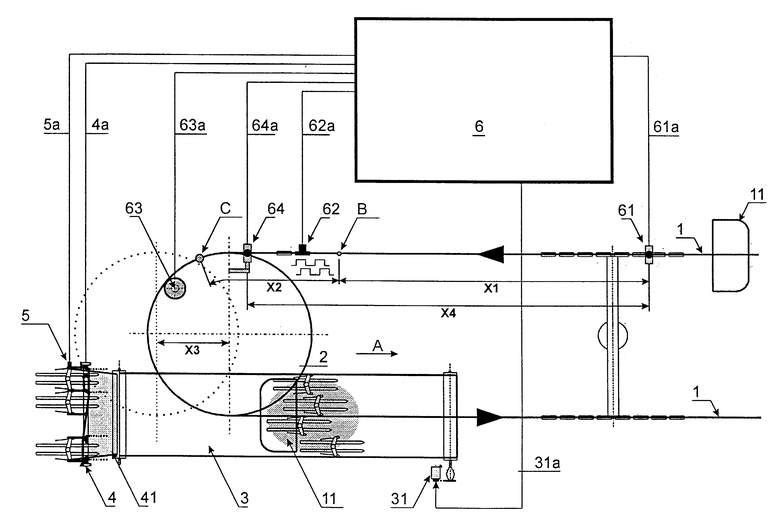
| ИЗМЕРИТЕЛЬНЫЙ ЛЮНЕТ ДЛЯ ПОДДЕРЖИВАНИЯ И ОБМЕРА ЦЕНТРАЛЬНЫХ ЗОН ЗАГОТОВКИ, ШЛИФОВАЛЬНЫЙ СТАНОК С ТАКИМ ИЗМЕРИТЕЛЬНЫМ ЛЮНЕТОМ, А ТАКЖЕ СПОСОБ ПОДДЕРЖИВАНИЯ И ОБМЕРА ЦЕНТРАЛЬНЫХ ЗОН ЗАГОТОВКИ | 2015 |
|
RU2702186C2 |
| FR 2055051 A, 07.05.71 | |||
| US 3548753 A, 22.12.70 | |||
| Канатная дорога | 1975 |
|
SU525577A1 |

