Область техники, к которой относится изобретение
Изобретение относится к канатным транспортным установкам и более конкретно к транспортным установкам с подвесным буксирным канатом.
УРОВЕНЬ ТЕХНИКИ
В настоящее время транспортные установки подвесного буксирного каната содержат вышки, чтобы иметь возможность преодолевать препятствия, возникающие из топографической конфигурации. Эти вышки в общем содержат шкивы, называемые направляющими шкивами, чтобы иметь возможность отклонения буксирного каната вверх или вниз с вертикальной кривизной. Чтобы пройти эти вышки, захваты транспортеров, прикрепленные к буксирному канату, должны быть выполнены таким образом, чтобы иметь возможность проходить через шкивы, когда транспортеры проходят через конструкцию. Прохождение вышек - это сложное мероприятие, так как шкивы должны позволять захватам транспортеров проходить, при этом продолжая выполнять свою функцию отклонения буксирного каната.
Кроме того, некоторые транспортные установки подвесного буксирного каната содержат системы для согласования как с левосторонними, так и с правосторонними кривыми в отношении направления движения буксировочных транспортеров. Но эти системы намного сложнее реализовать из-за трудности, с которой захваты могут проходить в сочетании с направляющими шкивами буксирного каната.
Кривые в общем согласуются посредством промежуточной станции, называемой станцией отклонения, расположенной между двумя конечными станциями, где транспортеры отсоединяются от буксирного каната. Но для этой конфигурации требуется наличие промежуточной станции на каждой кривой установки.
Может быть приведена заявка на патент Франции FR2496029, которая раскрывает подвесной канатный конвейер, имеющий кривую, причем канат направляется на кривой направляющими элементами, расположенными на внутренней стороне кривой, и в котором буксировочные транспортеры снабжены кронштейном, продолжающимся на той же стороне каната снаружи кривой так, чтобы направляющие элементы не мешали проходу кронштейнов. Конвейер дополнительно содержит устройство передачи, расположенное на погрузочной и/или разгрузочной станции установки, чтобы удерживать транспортеры, отсоединенные от каната, и размещать их на канате в положении, в котором кронштейн находится на внешней стороне кривой. Но устройство передачи является сложным для изменения направления транспортеров и, кроме того, эти транспортеры должны содержать кабину или стул, который может вращаться вокруг кронштейна, чтобы иметь возможность размещать вход в транспортер на правильной стороне зоны погрузки и/или разгрузки.
Может быть приведена публикация WO 2011/045808, в которой раскрыта транспортная установка подвесного буксирного каната, содержащая транспортер, оборудованный отсоединяемым захватом, выполненным с возможностью соединения транспортера с подвесным буксирным канатом съемным образом. Транспортер снабжен механизмом открытия/закрытия захвата, расположенным вертикально к захвату, чтобы позволить транспортеру согласовываться с кривой, то есть горизонтальное отклонение. Но механизм открытия/закрытия является громоздким и препятствует прохождению транспортера под пневматическими вышками, т.е. когда канат подвергается вертикальному отклонению, что снижает способность транспортера проходить через вышки.
Далее может быть приведена заявка на патент США US 2015/0083016, в которой раскрыта транспортная установка подвесного буксирного каната, содержащая два несущих каната для перемещения транспортеров между двумя конечными станциями, буксирный канат для буксировки транспортеров и вышку, поддерживающую несущие канаты, и где несущие канаты следуют изогнутой траектории. Кроме того, конструкция содержит несколько опорных шкивов, которые направляют буксирный канат внутрь вышки. В этой установке опорный шкив установлен с возможностью поворота по высоте и его положение регулируется действием регулирующей силы, приложенной пружиной перемещения, двигателя или веса. Ось вращения шкива имеет небольшой наклон в отношении горизонтали, чтобы обеспечить изгиб буксирного каната внутри вышки, продолжая выполнять свою функцию шкива, который должен поддерживать канат. Другими словами, когда транспортер расположен на линии перед вышкой, буксирный канат расположен в канавке шкива и оказывает давление на шкив, а когда транспортер проходит через вышку, каретка транспортера поднимает буксирный канат, который больше не соприкасается со шкивом, а регулировочное усилие перемещает шкив по направлению к каретке так, что канат может вернуться на свое место в канавке после того, как транспортер прошел вышку. Но небольшой наклон опорных шкивов не позволяет буксирному канату изгибаться дальше, и это означает, что вышка должна иметь большую длину, чтобы получить большие углы отклонения.
Также может быть приведена немецкая патентная заявка DE 19704825 A1, в которой раскрыта подвесная дорога, содержащая вышку, на которой установлен упорный ролик, скользящий между первым положением, в котором он находится в контакте с канатом, и вторым положением, в котором он отделен от каната, и двигатель, чтобы смещать упорный ролик. Но двигатель требует электропитания, которое должно быть обеспечено в месте расположения вышки.
Сущность изобретения
Одна из задач изобретения заключается в устранении этих недостатков и, более конкретно, в обеспечении транспортной установки подвесного буксирного каната, подходящей для любого типа захвата для крепления транспортеров, то есть может быть независима от боковых и/или вертикальных размеров захватов.
Другая задача изобретения состоит в обеспечении установки, которая позволяет буксировочным транспортерам вписываться в кривые.
Согласно одному признаку изобретения предлагается канатная транспортная установка, содержащая
подвесной буксирный канат,
транспортер, содержащий крепежное устройство для крепления транспортера к буксирному канату,
конструкция, на которой по меньшей мере один шкив установлен подвижно между первым положением, в котором шкив находится в контакте с буксирным канатом, и вторым положением, в котором шкив отделен от буксирного каната, и
по меньшей мере одно приводное устройство, соединенное с указанным по меньшей мере одним шкивом и выполненное с возможностью прикладывать первое усилие к шкиву для перемещения шкива в первое положение.
Указанное по меньшей мере одно приводное устройство выполнено с возможностью прикладывать второе усилие к шкиву для перемещения шкива во второе положение.
Соответственно, шкивы могут, таким образом, перемещаться, когда проходят захваты транспортера, когда транспортер проходит конструкцию. Затем наступает момент, когда шкив отделен от буксирного каната. Преимущественно шкив отделяется до того, как захват касается шкива. Когда транспортер проходит конструкцию, захват больше не препятствует отклоняющим шкивам, и может использоваться любой тип захвата для прохождения, независимо от его размеров. В соответствии с еще одним преимуществом буксирный канат может быть изогнут со всеми типами вертикальных или горизонтальных изгибов, что дает транспортерам возможность вписываться как в левосторонние, так и правосторонние кривые.
Транспортер может содержать устройство управления, выполненное с возможностью управления по меньшей мере одним приводным устройством для перемещения шкива.
Синхронизация между прохождением транспортера внутри конструкции и перемещением шкивов, таким образом, облегчается.
Согласно одному варианту выполнения устройство управления выполнено с возможностью дистанционного управления указанным по меньшей мере одним приводным устройством для перемещения шкива.
Согласно другому варианту выполнения устройство управления представляет собой пусковой механизм, выполненный с возможностью управления упомянутым по меньшей мере одним приводным устройством, когда пусковой механизм находится в контакте с указанным по меньшей мере одним приводным устройством.
Согласно одному варианту выполнения указанное по меньшей мере одно приводное устройство содержащее привод, установленный подвижно между выдвинутым положением, в котором шкив занимает свое первое положение, и втянутым положением, в котором шкив занимает второе положение, причем привод снабжен роликом и пусковой механизм содержит первый рельс, на который накатывается ролик, чтобы перемещать привод в его втянутое положение для приложения второго усилия, и второй рельс, на который накатывается ролик, чтобы перемещать привод в его выдвинутое положение для приложения первого усилия.
Согласно другому варианту выполнения указанное по меньшей мере одно приводное устройство содержит привод, установленный подвижно между выдвинутым положением, в котором шкив занимает свое первое положение, и втянутым положением, в котором шкив занимает второе положение, причем привод снабжен первым и вторым роликами, и пусковой механизм содержит первый рельс, на который накатывается первый ролик, чтобы перемещать привод в его втянутое положение для приложения второго усилия, и второй рельс, на который накатывается второй ролик, чтобы перемещать привод в его выдвинутое положение для приложения первого усилия.
Указанное по меньшей мере одно приводное устройство может содержать элемент смещения, выполненный с возможностью позволять шкиву занимать второе положение и оказывать первое усилие на шкив.
Пусковой механизм может содержать первый контррельс, образующий с первым рельсом направляющую для первого ролика, второй контррельс, образующий со вторым рельсом, направляющую для второго ролика и промежуточный рельс, соединяющую первый и второй рельс, причем указанное по меньшей мере одно приводное устройство содержит удерживающее средство для удерживания первого и второго роликов прижатыми к промежуточному рельсу.
Указанное по меньшей мере одно приводное устройство может содержать блокирующую систему, выполненную с возможностью принимать заблокированное состояние, обеспечивающее жесткую опору для буксирного каната на соответствующем шкиве, занимающем первое положение, и свободное состояние, в котором блокирующая система подвижна для обеспечения возможности использования соответствующего шкива занимать второе положение.
Преимущественно, указанное по меньшей мере одно приводное устройство содержит корпус, а блокировки образует коленчато-рычажное соединение, соединяющее шкив с корпусом.
Соответственно, может быть предусмотрена жесткая опора для буксирного каната, который обеспечивает работу каната при работе установки.
Согласно другому преимуществу транспортер содержит средство качения, а конструкция содержит направляющую конструкцию, выполненную с возможностью размещения средства качения, так что транспортер может двигаться по направляющей конструкции.
Таким образом, транспортер может быть стабилизирован в отношении буксирного каната, когда шкивы отделены от конструкции.
Указанный по меньшей мере один шкив может быть установлен с возможностью вращения вокруг вертикальной оси вращения.
Эта конфигурация позволяет транспортерам принимать кривые, отклоняя буксирный канат по горизонтали.
Установка может содержать несколько шкивов, последовательно установленных на конструкции вдоль кривой для отклонения буксирного каната между двумя концами конструкции и содержит несколько приводных устройств, соответственно соединенных со шкивами.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Другие преимущества и признаки станут более очевидными из нижеследующего описания конкретных вариантов выполнения изобретения, приведенных только для целей не ограничительного примера и представленных на прилагаемых чертежах, где:
- на фигуре 1 схематично показан вид сверху варианта выполнения канатной транспортной установки согласно изобретению;
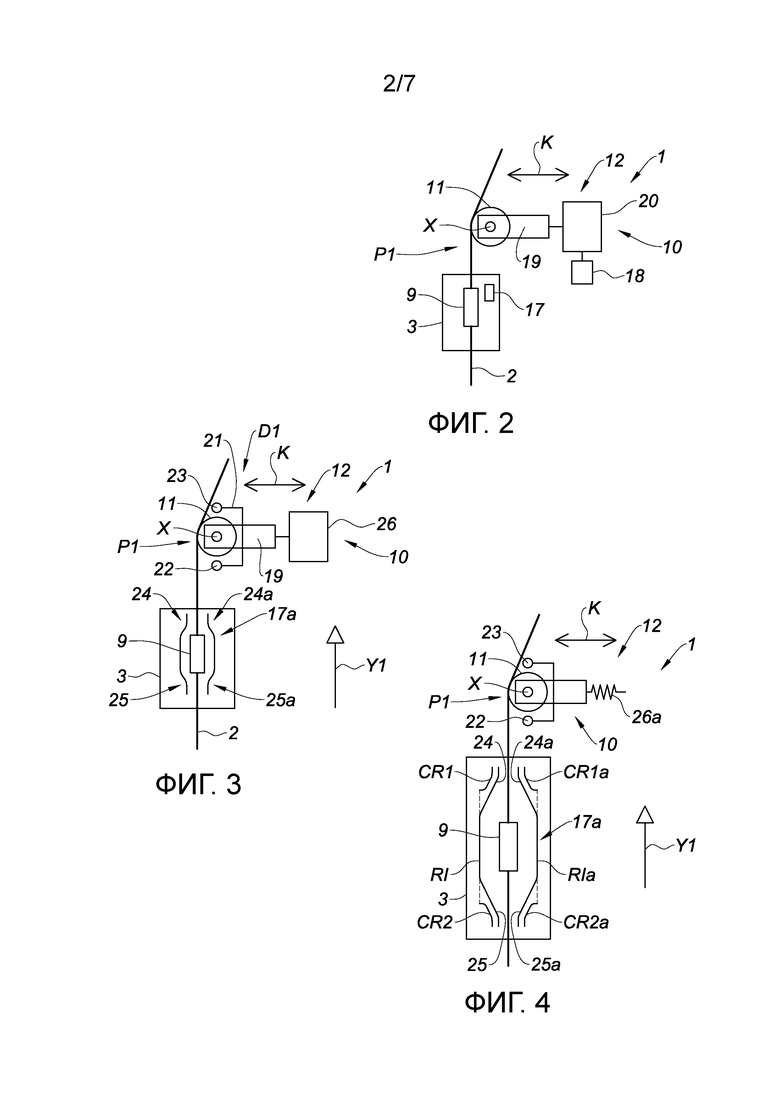
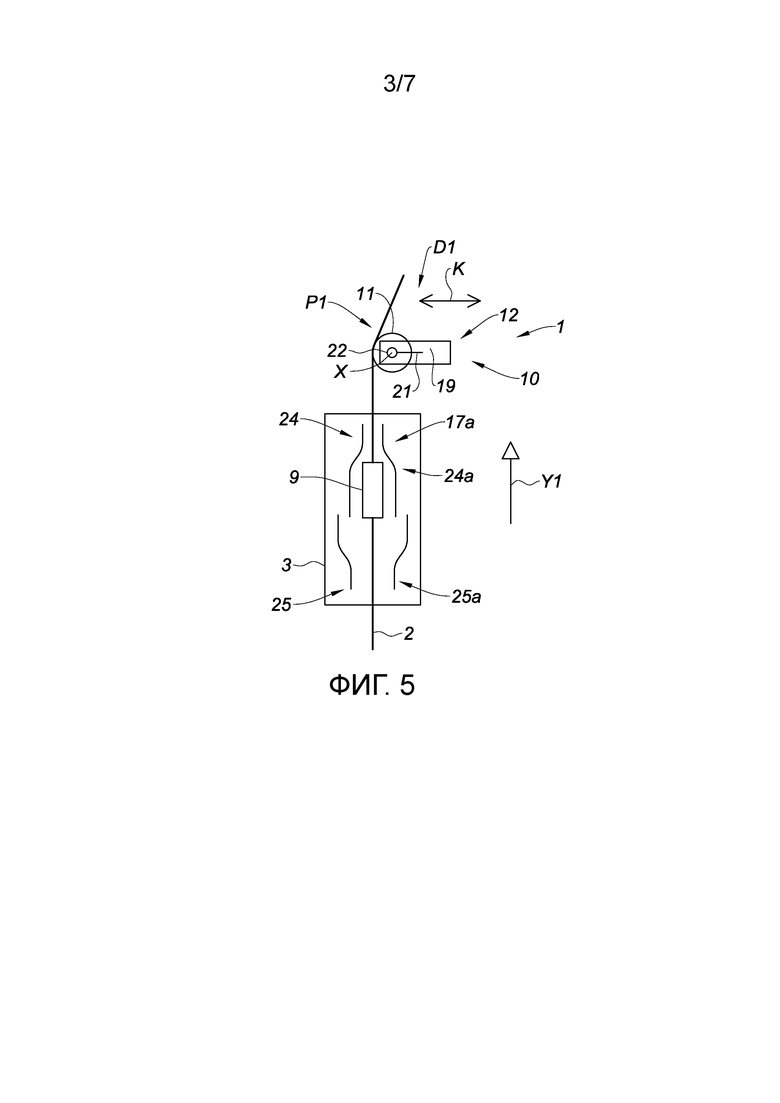
- на фигурах 2-5 схематично показаны виды сверху различных вариантов выполнения устройства управления и приводного устройства;
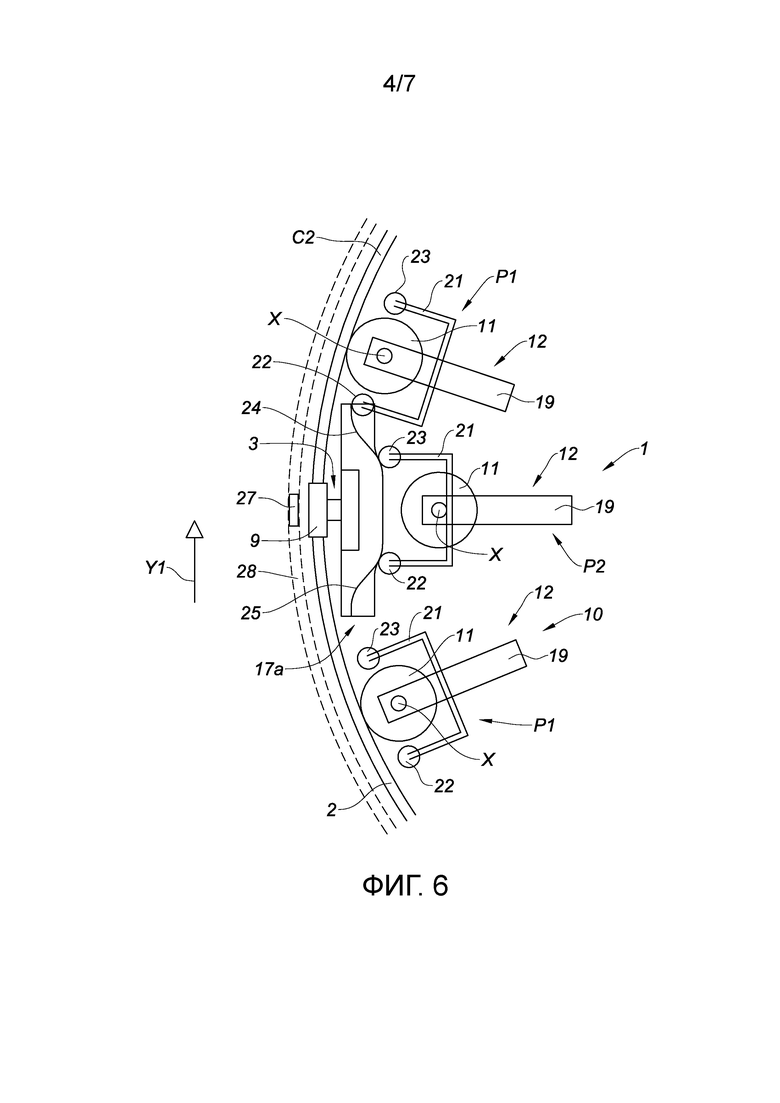
- на фигуре 6 схематично показан вид сверху конструкции установки, в которой транспортер проходит конструкцию;
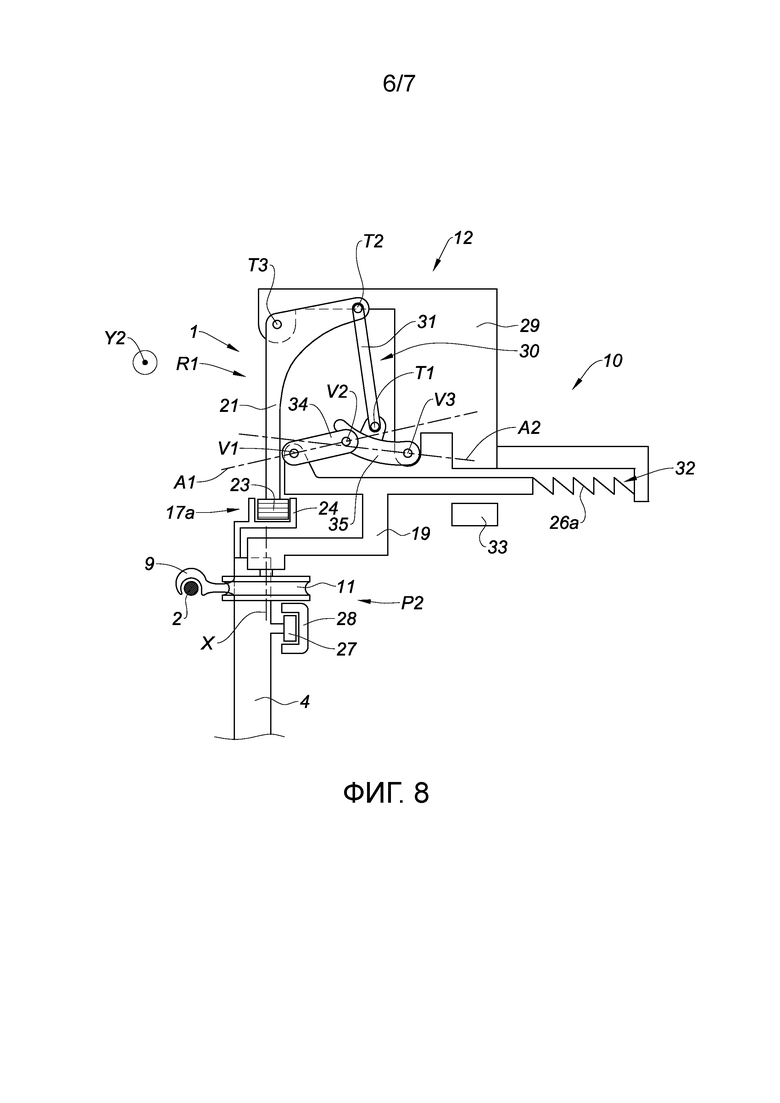
- на фигуре 7 схематично показан вид спереди варианта выполнения приводного устройства, в котором шкив занимает первое положение; и
- на фигурах 8 и 9 схематично показаны два вида спереди приводного устройства фигуры 7, в котором шкив занимает второе положение.
ПОДРОБНОЕ ОПИСАНИЕ
На фигуре 1 представлен вариант выполнения транспортной установки 1 с помощью каната 2. Установка 1 содержит подвесной буксирный канат 2, по меньшей мере один транспортер 3, 4, выполненный для буксировки канатом 2 для транспортировки людей или товаров. Установка 1 может быть любого типа, например моноканатного типа, как показано на фигуре 1, или двухканатного типа с фиксированными или отсоединяемыми захватами с непрерывным или движущимся вперед и назад канатом. Моноканатная установка включает в себя один канат, который является как несущим, так и буксирным канатом, причем двухканатная установка содержит по меньшей мере один буксирный канат и по меньшей мере один несущий канат. Установка с фиксированным захватом включает в себя транспортеры, которые постоянным образом прикреплены к буксирному канату, отсоединяемая установка содержит транспортер, прикрепленный отсоединяемым образом к буксирному канату. Непрерывная канатная установка включает в себя буксирный канат, который работает в замкнутом контуре между двумя конечными станциями установки, и транспортеры работают непрерывным образом вдоль буксирного каната. Установка, движущаяся вперед и назад, включает в себя транспортер, который совершает перемещение наружу и внутрь по одному и тому же пути между двумя конечными станциями. На фигуре 1 представлена отсоединяемая моноканатная установка 1 с непрерывным канатом 2. Установка 1 содержит две конечные станции 5, 6 для погрузки/разгрузки людей в транспортерах 3, 4. Установка 1 дополнительно содержит ведущий терминал 5, снабженный двигателем для ведения ведущего шкива 7 так, чтобы заставить буксирный канат 2 двигаться. Установка 1 также содержит возвратный терминал 6, содержащий возвратный шкив 8 для натяжения буксирного каната 2. Транспортеры 3, 4 дополнительно прикреплены к буксирному канату 2 и удерживаются выше уровня земли, и тогда буксирный канат 2 считается подвесным, а транспортная установка 1 является канатной дорогой.
Каждый транспортер 3, 4 содержит кабину, которая может быть отсеком, выполненным для приема пассажиров или выполненным для хранения товаров, например, отходов, а установка является подъемником открытого типа. Каждый транспортер 3, 4 также может содержать стулья, в частности без боковых панелей, и установка является типом кресельного подъемника. Каждый транспортер 3, 4 установки 1 содержит крепежное устройство 9 для крепления транспортера 3, 4 к буксирному канату 2. Крепежное устройство 9 может быть фиксированного типа или с отсоединяемым захватом.
Установка 1 также содержит одну или несколько конструкций 10, где проходит буксирный канат. Конструкция 10 представляет собой вертикальную конструкцию, служащую для поддержки буксирного каната 2. Конструкция 10 может быть линейной опорой, то есть вышкой, расположенной между двумя конечными станциями 5, 6. Линейная опора может служить для поддержки, прижимания или горизонтального отклонения буксирного каната. Конструкция 10 также может быть внутренней опорной конструкцией 5, 6, находящейся в конечной станции, или в промежуточной станции. Отклоняющая конструкция 10, также называемая горизонтальной отклоняющей вышкой для обеспечения кривой установки 1, была представлена на фигуре 1. Был также представлен пример прогрессии первого транспортера 3 к возвратному терминалу 6 в направлении, представленном ссылочным материалом Y1, и прогрессии второго транспортера 4, идущего в противоположном направлении Y2 к ведущему терминалу 5.
В общем случае конструкция 10 содержит по меньшей мере один шкив 11, установленный подвижным образом. Шкив представляет собой небольшое колесо, обеспеченное канавкой, выполненной для приема буксирного каната 2. Шкив 11 установлен с возможностью вращения вокруг главной оси Х вращения. Главная ось Х вращения может быть вертикальной, то есть шкив 11 является горизонтальным отклоняющим шкивом, и он позволяет транспортеру брать левостороннюю или правостороннюю кривую. Главная ось Х вращения также может быть горизонтальной, то есть шкив 11 является компрессионным или опорным шкивом, и транспортер может перемещаться вверх или вниз. Предпочтительно конструкция 10 содержит несколько шкивов 11, последовательно установленных на конструкции 10 вдоль кривой C1, C2, чтобы отклонять канат 2, расположенный между двумя концами конструкции 10 и согласно кривой C1, C2. Например, восемнадцать шкивов были представлены на фигуре 1, и эти шкивы 11, в частности, называются отклоняющими шкивами, поскольку их основные оси X вращения вертикальны и они позволяют буксирному канату 2 быть изогнутым горизонтально внутри конструкции 10. Кривизна получается отклонением каната 2, который следует за расположением шкивов 11 вдоль кривой C1, C2. Кроме того, по меньшей мере один шкив 11 установлен подвижно между первым положением Р1, в котором шкив 11 находится в контакте с буксирным канатом 2, как показано на фигурах 2-5 и 7, и вторым положением Р2, в котором шкив 11 отделен от буксирного каната 2, как показано на фигурах 8 и 9. Под «отделенным от буксирного каната 2» подразумевается тот факт, что шкив 10 не контактирует с буксирным канатом 2. Для перемещения из первого положения P1 во второе положение P2, шкив 11 может быть установлен с возможностью подвижного перемещения вдоль оси перемещения, перпендикулярной продольной оси каната 2. В качестве варианта шкив 11 установлен на кронштейне, который установлен вокруг дополнительной оси вращения, чтобы иметь возможность отделять шкив 11 от каната 2.
Чтобы иметь возможность перемещать шкивы 11 в первое или второе положения Р1, Р2, установка 1 содержит по меньшей мере одно приводное устройство 12, соединенное, по меньшей мере с одним подвижным соединительным шкивом 11. Установка 1 предпочтительно содержит несколько приводных устройств 12, соответственно соединенных с несколькими шкивами. Другими словами, каждый шкив 11 конструкции 10 связан с приводным устройством 12, которое перемещает шкив 11 в первое или второе положение P1, P2. В частности, каждое приводное устройство 12 выполнено с возможностью приложения первого усилия к соответствующему шкиву 11, чтобы перемещать его в первое положение P1 и приложения второго усилия к соответствующему шкиву 11, чтобы перемещать его во второе положение P2.
Общий принцип работы установки 1 заключается в том, что когда транспортер не проходит конструкцию 10, шкивы конструкции 10 занимают свое первое положение P1. Затем, когда транспортер 4 проходит конструкцию 10, приводные устройства 12, связанные со шкивами 11 группы 13, оказывают второе усилие на шкивы 11 группы 13, чтобы перемещать их во второе положение Р2. Таким образом создается свободное пространство между буксирным канатом 2 и шкивом 11, перемещенным во второе положение Р2, что облегчает прохождение захвата 9 на уровне шкива 11 при прохождении конструкции 10. Когда транспортер 4 прошел группу 13 шкивов 11, приводные устройства 12 оказывают первое усилие на шкивы 11 группы 13, чтобы перемещать их в свои первые положения P1. Поэтому шкивы 11 могут быть отделены от буксирного каната 2, когда транспортер 3, 4 проходит через конструкцию 10. Преимущественно шкивы 11, расположенные на уровне захвата 9 транспортера 3, 4, отделяются, когда транспортер проходит конструкцию 10. Первая группа 14 шкивов первоначально в первом положении P1, где они находятся в контакте с буксирным канатом 2, представлена на фигуре 1. Шкивы 11 первой группы 14 еще не пройдены, и их исходное положение, следовательно, соответствует первому положению P1. Вторая группа 13 соответствует шкивам 11, занимающим свое второе положение P2, где они отделены от каната 2. Была также представлена третья группа 15, для которой шкивы 11 были возвращены в свое первое положение P1 после прохождения транспортера 4.
Преимущественно, чтобы иметь возможность синхронизировать перемещение шкивов 11 с прохождением захвата 9, транспортеры 3, 4 могут содержать устройство 17, 17а управления, выполненное с возможностью управления по меньшей мере одним приводным устройством 12 для перемещения соответствующего шкива 11.
Устройство 17, 17а управления может быть разного типа, например, электронного типа или механического типа. Также может быть предусмотрено, что станция 5, 6 установки должна быть снабжена устройством управления электронного типа 17, выполненным с возможностью осуществления дистанционного управления приводными устройствами 12, когда транспортеры проходят через шкивы 11 конструкций 10. В общем случае приводное устройство 12 содержит опорный рычаг 19 шкива, на котором установлен соответствующий шкив 11, выполненный с возможностью поворота вокруг его основной оси X. Вариант выполнения, в котором устройство 17, 17а управления является электронным, представлен на фигуре 2. Согласно этому варианту выполнения установка 1 содержит двигатель 20 для перемещения рычага и, следовательно, шкива 11. Например, электронное устройство 17 управления содержит блок передачи сигнала управления, адресованного приемному блоку 18, предназначенному для обнаружения передаваемого сигнала для управления приводным устройством 12, так, что последний оказывает первое или второе усилие на соответствующий шкив 11, что бы перемещать последний. Направления движения шкивов 11 представлены ссылкой К. Сигнал управления предпочтительно передается, когда транспортер 3 приближается к конструкции 10, и шкив 11 затем перемещается во второе положение Р2 до того, как захват 9 входит в контакт со шкивом 11. После прохождения захвата 9 блок передачи передает второй сигнал управления, называемый сигналом замыкания, адресованный приемному блоку 18. Приемный блок 18 может затем управлять приводным устройством 12, чтобы прилагать первое усилие для перемещения связанного шкива 11 назад к его первому положению P1, находящейся в контакте с буксирным канатом 2. В качестве варианта электронное устройство 17 управления содержит радиочастотную метку, которая может быть обнаружена радиочастотным приемопередатчиком, расположенным на конструкции 10. В этом варианте приемопередатчик управляет приводным устройством 12 для перемещения шкива 11 во второе положение Р2, когда приемопередатчик обнаруживает метку транспортера 4 и управляет приводным устройством 12 для перемещения шкива 11 в первое положение Р1, когда приемопередатчик больше не обнаруживает метку транспортера 4, т.е. когда захват 9 транспортера прошел шкив 11 конструкции 10.
На фигурах 3-5 представлены другие варианты выполнения, в которых устройство 17, 17а управления является механическим. В общем случае, когда устройство 17, 17а управления является механическим, оно является пусковым механизмом 17а, выполненным с возможностью управления приводными устройствами 12, когда пусковой механизм 17а находится в контакте с приводными устройствами 12. Такое устройство 17а управления механического типа усиливает синхронизацию между прохождением захвата 9 и перемещением разделителей шкивов 11 от буксирного каната 2. Приводное устройство 12 содержит подвижный опорный рычаг 19 шкива, а привод 21 также установлен подвижно между выдвинутым положением D1, показанным на фигурах 3-5 и 7, в котором шкив 11 занимает свое первое положение P1 и втянутым положением R1, показанным на фигурах 8 и 9, в котором шкив 11 занимает второе положение Р2. Привод 21 дополнительно содержит первый и второй ролики 22, 23, соответственно называемые входными и выходными роликами. Входной ролик 22 является первым роликом, который входит в контакт с пусковым механизмом 17а, когда транспортер проходит конструкцию 10, а выходной ролик 23 является последним роликом, который входит в контакт с пусковым механизмом 17а, чтобы переместить шкив 11 назад в первое положение P1. В качестве варианта привод 21 содержит единственный ролик 22, как показано на фигуре 5. Два ролика 22, 23 позволяют уменьшить длину пускового механизма 17a транспортера 3, 4. Пусковой механизм 17а дополнительно содержит по меньшей мере один первый рельс 24, 24а, на который накатывается первый ролик 22, для перемещения привода 21 в его втянутое положение R1, для приложения второго усилия для перемещения шкива 11 во второе положение Р2. Пусковой механизм 17a дополнительно содержит по меньшей мере один второй рельс 25, 25а, на который накатывается второй ролик 23, чтобы перемещать привод 21 в его выдвинутое положение D1, для приложения первого усилия для перемещения шкива 11 в его первое положение P1. На фигурах 3-5 транспортер 3 содержит два первых рельса 24, 24а, в частности левый первый рельс 24 и правый первый рельс 24а, расположенные с каждой стороны захвата 9. Транспортер 3 также содержит два вторых рельса 25, 25а, левый второй рельс 25 и правый второй рельс 25а, также расположенные с каждой стороны захвата 9. Рельсы 24, 24а и 25, 25а могут быть расположены симметрично относительно захвата 9, чтобы иметь возможность принимать правосторонние и левосторонние кривые и двигаться в обоих направлениях Y1, Y2 движения буксирного каната 2. Кроме того, первые рельсы 24, 24а предпочтительно представляют собой две изогнутые направляющие рельсы, в частности вогнутые в направлении внешней стороны транспортера 3, для перемещения первого ролика 22 и, следовательно, привода 21 во втянутое положение R1. Вторые рельсы 25, 25а также представляют собой две изогнутые направляющие рельсы, в частности вогнутые в направлении внешней стороны транспортера 3, чтобы позволять второму ролику 23 и, следовательно, приводу 21 вернуться в выдвинутое положение D1.
В вариантах выполнения, проиллюстрированных на фигурах 3 и 4, левосторонний первый и второй рельс 24, 25 являются смежными и образуют единственный рельс, обозначенный левосторонним рельсом. Левосторонний рельс 24, 25 затем содержит промежуточный рельс RI, соединяющий левосторонний первый и второй рельс 24, 25. Когда рельсы 24, 24а и 25, 25а расположены симметрично, правосторонние первые и вторые рельсы 24а, 25а также смежны и образуют единый рельс, обозначенный правосторонним рельсом. Правосторонний рельс 24а, 25а затем содержит промежуточный рельс RIa, соединяющий первый правосторонний и второй рельс 24а, 25а. В этом случае первый и второй ролики 22, 23 могут накатываться на промежуточный рельс RI, RIa.
Согласно варианту выполнения, показанному на фигуре 3, приводное устройство 12 дополнительно содержит элемент 26 смещения, выполненный с возможностью прижатия второго ролика 23 ко второму рельсу 25а. Элемент 26 смещения выполнен с возможностью позволять связанному шкиву 11 занимать второе положение Р2 и оказывать первое усилие на шкив 11, чтобы перемещать его обратно в первое положение Р1. Поддержание давления позволяет второму ролику 23 следовать изогнутой форме второго рельса 25, 25а и возвращать привод 21 в его выдвинутое положение D1 после прохождения захвата 9. Элемент 26 смещения может представлять собой упругий элемент, такой как пружина или моторизованное средство, например электрический, пневматический, гидравлический или двигатель внутреннего сгорания.
Согласно варианту выполнения, показанному на фигуре 4, пусковой механизм 17a содержит по меньшей мере первый контррельс CR1, CR1a, образующий с первым рельсом 24, 24a, направляющую для первого ролика 22 и по меньшей мере второй контррельс CR2, CR2a, образующий со вторым рельсом 25, 25а, направляющую для второго ролика 23. В этом варианте выполнения приводное устройство 12 содержит удерживающее средство 26а, выполненное с возможностью удержания первого и второго роликов 22, 23, прижимаясь к промежуточной направляющей RI, RIa. В этой конфигурации, когда транспортер 3 проходит конструкцию 10, транспортер 3 перемещается в направлении Y1. Первый ролик 22 входит в направляющую, образованную первым рельсом 24а и первым контррельсом CR1a, и привод 21 перемещается в свое втянутое положение R1. Таким образом, шкив 11 перемещается во второе положение Р2. Затем первый ролик 23 покидает направляющую, а первый и второй ролики 22, 23 следуют за промежуточным рельсом RIa, удерживающимся при помощи промежуточного рельса RIa посредством удерживающего средства 26a. Первый ролик 22 проходит впереди входа второй направляющей, образованной вторым контррельсом CR2a и вторым рельсом 25a, и не входит во вторую направляющую, пока второй ролик 23 прижимается к промежуточной направляющей RIa. Затем второй ролик 23 входит во вторую направляющую, а вторая направляющая перемещает привод 21 в его выдвинутое положение D1, которое перемещает шкив 11 назад в его первое положение P1. Можно отметить, что удерживающие средства 26а отличаются от элемента 26 смещения, описанного ранее. Действительно, удерживающие средства 26a обеспечивают только прочность, чтобы удерживать ролики 22, 23 на промежуточном рельсе RI, RIa, и эта вторая направляющая, которая обеспечивает прочность для перемещения привода 21 назад в выдвинутое положение D1. Напротив, в варианте выполнения, показанном на фигуре 3, элемент 26 смещения обеспечивает силу для перемещения привода 21 обратно в выдвинутое положение D1. Таким образом, можно использовать удерживающие средства 26а, выполненные с возможностью обеспечения более низкого удерживающего усилия, чем усилие смещения, обеспечиваемое элементом 26 смещения.
Вариант выполнения, в котором первый рельс 24, 24а не соприкасается со вторым рельсом 25, 25а, представлен на фигуре 5. Предпочтительно приводное устройство 12 содержит один ролик 22. В этом варианте выполнения приводное устройство 12 не обязательно должно содержать элемент 26 смещения. В этом случае пусковой механизм 17а содержит второй рельс 25, 25а, который позволяет приводу 21 двигаться обратно в выдвинутое положение D1. Второй рельс 25, 25а расположен на расстоянии от первого рельса 24, 24а, и созданный зазор, позволяет проходить ролику 22, который будет следовать внутренней кривизне второго рельса 25, 25а так, что привод 21 возвращается в свое выдвинутое положение D1.
На фигуре 6 был представлен другой вариант выполнения установки 1, в котором устройство 17, 17а управления также является механическим. В этом другом варианте выполнения транспортер 3 содержит средство 27 качения, а конструкция 10 содержит направляющую конструкцию 28, выполненную с возможностью приема средства 27 качения, так что транспортер 3 может проходить по направляющей конструкции 28. В частности, направляющая конструкция проходит вдоль кривизны C2 буксирного каната 2. На фигуре 6 шкив 11, расположенный посредине других двух шкивов 11, находится во втором положении Р2. Ролики 22, 23 соответствующего приводного устройства 12 работают при нажатии на пусковой механизм 17а транспортера 3, 4. Другие шкивы 11 находятся в их первом положении P1. Направляющая конструкция 28 позволяет захвату 9 транспортера 3 удерживать буксирный канат 2, когда перемещение шкивов 11 происходит в их второе положение Р2.
На фигурах 7-9 представлен вариант установки 1, в котором устройство 17, 17а управления также является механическим. Приводное устройство 12 содержит корпус 29 и блокирующую систему 30. Блокирующая система 30 выполнена с возможностью занимать заблокированное состояние, обеспечивающее жесткую опору буксирного каната 2 на соответствующем шкиве 11, занимающем первое положение P1, и свободное состояние, в котором блокирующая система 30 может перемещаться, чтобы позволять соответствующему шкиву 11 занимать второе положение P2. В частности, в заблокированном состоянии блокирующая система 30 блокирует шкив 11 в первом положении P1, чтобы обеспечить жесткую опору. Например, блокирующая система 30 образует коленчато-рычажное соединение, соединяющее шкив 11 с корпусом 29. Коленчато-рычажное соединение содержит две шарнирные тяги, которые позволяют перемещаться из одного состояния в другое, прикладывая два различных усилия к шарнирным тягам. Такая блокирующая система 30 отличается от упругой системы. Действительно, упругая система обеспечивает усилие смещения, которое стремится смещать часть к ее исходному положению после перемещения детали. Для упругой системы предусмотрено одно усилие для сгибания, растяжения, сжатия или скручивания упругого элемента, и именно упругий элемент обеспечивает усилие смещения. Напротив, в случае блокирующей системы 30 имеется приводное устройство 12, которое обеспечивает два усилия для блокировки или освобождения блокирующей системы 30.
Согласно варианту, показанному на фигурах 7-9, корпус 29 установлен неподвижно на конструкции 10. Приводное устройство 12 содержит подвижный опорный рычаг 19 шкива, причем привод 21 установлен подвижно между выдвинутым положением D1 и втянутым положением R1 и рычагом 31, соединяющим блокирующую систему 30 с приводом 21 с помощью двух поворотных соединений соответственно T1, T2. Привод 21 содержит первый и второй ролики 22, 23 и установлен на корпусе 29 поворотным соединением Т3. Опорный рычаг 19 шкива установлен с возможностью скольжения внутри корпуса 32, образованного в корпусе 29 приводного устройства 12. Таким образом, опорный рычаг 19 шкива может занимать блокирующее положение, в котором шкив 11 занимает свое первое положение Р1, и свободное положение, в котором шкив 11 отделен от буксирного каната 2, и шкив 11 может занимать свое второе положение Р2, и наоборот. Блокирующая система 30 предпочтительно содержит две шарнирных тяги 34, 35. Первая тяга 34 установлена на части опорного рычага 19 шкива с помощью первого поворотного соединения V1, и на второй тяге 35 с помощью второго поворотного соединения V2. Вторая тяга 35 со своей стороны установлена на корпусе 29 приводного устройства 12 с помощью поворотного соединения V3. В частности, первая тяга 34 содержит первую ось A1, проходящую через первое и второе поворотное соединение V1, V2, а вторая тяга 35 содержит вторую ось A2, проходящую через второе и третье поворотное соединение V2, V3. Когда блокирующая система 30 принимает заблокированное состояние, как показано на фигуре 7, первая ось A1 образует первый угол со второй осью A2, а тяги 34, 35 блокируются против упора. Эта конфигурация позволяет обеспечить жесткую опору для буксирного каната 2 на шкиве 11. Когда блокирующая система 34 принимает свое свободное состояние, как показано на фигурах 8 и 9, первая ось A1 образует второй угол, отличный от первого угла, со второй осью A2 и тяги 34, 35 являются подвижными. В этой конфигурации опорный рычаг 19 шкива может скользить в корпусе 32, а шкив 11 может занимать второе положение Р2. Передача от одного состояния в другое, другими словами, освобождение блокирующей системы 30, достигается путем пропускания точки выравнивания, для которой выровнены первая и вторая оси A1, A2. Передача точки выравнивания разрешается за счет упругости буксирного каната 2.
На фигуре 7 показан шкив 11, занимающий свое первое положение P1, то есть положение, находящееся в контакте с буксирным канатом 2. В этой конфигурации блокирующая система 30 находится в заблокированном состоянии. На фигуре 8 транспортер 3, 4 был представлен в тот момент, когда он проходит конструкцию 10. Кроме того, пусковой механизм 17а транспортера 3, 4 находится в контакте с приводным устройством 12 для управления перемещением шкива 11 в его второе положение P2. Блокирующая система 30 находится в исходном свободном состоянии, где шкив 11 отделен от буксирного каната 2, и когда тяги 34, 35 прошли точку выравнивания. Также сказано, что шкив 11 занимает второе начальное положение P2. На фигуре 9 показан транспортер 3, 4, проходящий через конструкцию 10, и привод 21 в его втянутом положении R1. Когда блокирующая система 30 находится в начальном свободном состоянии, тяги 34, 35 могут перемещаться, а пусковой механизм 17а может перемещать первый ролик 22, отделяя его от буксирного каната 2, что приводит к отделению привода 21 от его втянутого положения R1. Перемещая привод 21, последний передает второе усилие, генерируемое пусковым механизмом 17а, для перемещения тяг 34, 35 и для перемещения опорного рычага 19 шкива в свободное положение против концевого упора. Свободное положение концевого упора соответствует положению, в котором опорный рычаг 19 шкива прижимается против упора 33, предусмотренного на корпусе 29 приводного устройства 12. Когда опорный рычаг 19 шкива достигает своего свободного положения концевого упора, шкив 11 занимает положение, наиболее удаленное от буксирного каната 2, также называемое вторым положением концевого упора Р2.
Другими словами, когда первый рельс 24, 24а входит в контакт с первым роликом 22, первый ролик 22 прижимается к первому рельсу 24 и следует изогнутой форме первого рельса 24, что позволяет смещать первый ролик 22, отделяя его от буксирного каната 2. Когда первый ролик 22 смещен, привод 21 и рычаг 31 перемещают вторую тягу 35, чтобы освободить блокирующую систему 30. Более конкретно, когда происходит освобождение, шкив 11 оказывает усилие на буксирный канат 2 в направлении, противоположном движению привода 21, и, в частности, из-за упругости буксирного каната 2, допускается освобождение блокирующей системы 30. После прохождения захвата 9 второй ролик 23 приводного устройства 12 снова занимает свое начальное положение, что приводит к перемещению шкива 11 назад в его первое положение P1. Приводное устройство 12 предпочтительно содержит удерживающее средство 26а, которое представляет собой, например, пружину, соединяющую опорный рычаг 19 шкива с корпусом 29 приводного устройства 12. Удерживающее средство 26а позволяет опорному рычагу 19 шкива скользить в корпусе 32 и создает прочность, чтобы удерживать ролики 22, 23 привода 21 прижатыми к промежуточному рельсу RI, RIa. Можно отметить, что удерживающее средство 26а не участвует в прижатии буксирного каната 2 к шкиву 11, когда шкив 11 занимает свое первое положение Р1. В этом первом положении P1 удерживающее средство 26a не оказывает никакого воздействия на шкив 11, поскольку коленчато-рычажное соединение обеспечивает жесткую опору.
Изобретение, которое только что было описано выше, обеспечивает транспортную установку подвесного буксирного каната, которая позволяет передавать конструкции независимо от типа захвата. Установка особенно подходит для захватов с боковым или вертикальным пространственным положением. Кроме того, такая установка позволяет транспортерам принимать левосторонние или правосторонние кривые, что обеспечивает возможность изготовления установки в среде с большой плотностью препятствий, в частности в городских условиях. Кроме того, необходимо внедрить промежуточные станции для отвода транспортеров, отсоединенных от буксирного каната, которые являются объемными и усложняют сборку установки.



Изобретение относится к канатным транспортным установкам. Канатная транспортная установка содержит подвесной буксирный канат (2), транспортер (3, 4), содержащий крепежное устройство для прикрепления транспортера к буксирному канату (2), конструкцию (10), на которой по меньшей мере один шкив (11) установлен подвижно между первым положением, в котором шкив (11) находится в контакте с буксирным канатом (2), и вторым положением, в котором шкив (11) отделен от буксирного каната (2), и по меньшей мере одно приводное устройство (12), соединенное с указанным по меньшей мере одним шкивом (11) и выполненное с возможностью прикладывать первое усилие к шкиву (11) для перемещения шкива (11) в первое положение, и прикладывать второе усилие к шкиву (11) для перемещения шкива (11) во второе положение. В результате в транспортной установке может применяться любой тип захватов для крепления транспортеров, при этом буксировочные транспортеры успешно вписываются в кривые. 10 з.п. ф-лы, 9 ил.
1. Канатная транспортная установка, содержащая
подвесной буксирный канат (2),
транспортер (3, 4), содержащий крепежное устройство для прикрепления транспортера к буксирному канату (2),
конструкцию (10), на которой по меньшей мере один шкив (11) установлен подвижно между первым положением (P1), в котором указанный по меньшей мере один шкив (11) находится в контакте с буксирным канатом (2), и вторым положением (P2), в котором указанный по меньшей мере один шкив (11) отделен от буксирного каната (2), и
по меньшей мере одно приводное устройство (12), соединенное с указанным по меньшей мере одним шкивом (11), выполненное с возможностью прикладывать первое усилие к указанному по меньшей мере одному шкиву (11) для перемещения указанного по меньшей мере одного шкива (11) в первое положение (P1) и прикладывать второе усилие к указанному по меньшей мере одному шкиву (11) для перемещения указанного по меньшей мере одного шкива (11) во второе положение (P2), причем указанное по меньшей одно приводное устройство (12) содержит блокирующую систему (30), выполненную с возможностью принимать заблокированное состояние, обеспечивающее жесткую опору для буксирного каната (2) на указанном по меньшей мере одном шкиве (11), занимающем первое положение (P1), и свободное состояние, в котором блокирующая система (30) подвижна, чтобы позволить указанному по меньшей мере одному шкиву (11) занимать второе положение (P2),
отличающееся тем, что указанное по меньшей мере одно приводное устройство (12) содержит корпус (29), а блокирующая система (30) образует коленчато-рычажное соединение, соединяющее указанный по меньшей мере один шкив (11) с корпусом (29).
2. Установка по п. 1, в которой транспортер (3, 4) содержит устройство (17, 17а) управления, выполненное с возможностью управления по меньшей мере одним приводным устройством (12) для перемещения указанного по меньшей мере одного шкива (11).
3. Установка по п. 2, в которой управляющее устройство (17, 17а) выполнено с возможностью дистанционного управления указанным по меньшей мере одним приводным устройством (12) для перемещения указанного по меньшей мере одного шкива (11).
4. Установка по п. 2, в которой управляющее устройство (17, 17а) представляет собой пусковой механизм (17а), выполненный с возможностью управления указанным по меньшей мере одним приводным устройством (12), когда пусковой механизм (17а) находится в контакте с указанным по меньшей мере одним приводным устройством (12).
5. Установка по п. 4, в которой указанное по меньшей мере одно приводное устройство (12) содержит привод (21), установленный подвижно между выдвинутым положением (D1), в котором указанный по меньшей мере один шкив (11) занимает свое первое положение (Р1), и втянутым положением (R1), в котором указанный по меньшей мере один шкив (11) занимает второе положение (P2), причем привод (21) снабжен роликом (22, 23), и пусковой механизм (17а) содержит первый рельс (24, 24а), на который накатывается ролик (22, 23), чтобы перемещать привод (21) в его втянутое положение (R1) для приложения второго усилия, и второй рельс (25, 25а), на который накатывается ролик (22, 23), чтобы перемещать привод (21) в его выдвинутое положение (D1) для приложения первого усилия.
6. Установка по п. 4, в которой указанное по меньшей мере одно приводное устройство (12) содержит привод (21), установленный подвижно между выдвинутым положением (D1), в котором указанный по меньшей мере один шкив (11) занимает свое первое положение (Р1) и втянутым положением (R1), в котором указанный по меньшей мере один шкив (11) занимает второе положение (P2), при этом привод (21) снабжен первым и вторым роликами (22, 23), а пусковой механизм (17а) содержит первый рельс (24, 24а), на который накатывается первый ролик (22), чтобы перемещать привод (21) в его втянутое положение (R1), для приложения второго усилия, и второй рельс (25, 25а), на который накатывается второй ролик (23), чтобы перемещать привод (21) в его выдвинутое положение (D1), для приложения первого усилия.
7. Установка по п. 5, в которой указанное по меньшей мере одно приводное устройство (12) содержит элемент (26) смещения, выполненный с возможностью позволять указанному по меньшей мере одному шкиву (11) занимать второе положение (Р2) и оказывать первое усилие на указанный по меньшей мере один шкив (11).
8. Установка по п. 6, в которой пусковой механизм (17а) содержит первый контррельс (CR1, CR1a), образующий с первым рельсом (24, 24a) направляющую для первого ролика (22), второй контррельс (CR2, CR2a), образующий со вторым рельсом (25, 25a) направляющую для второго ролика (23), и промежуточный рельс (RI, RIa), соединяющий первый и второй рельс (24, 25 и 24a, 25a), причем указанное по меньшей мере одно приводное устройство (12) содержит удерживающее средство (26a), чтобы удерживать первый и второй ролики (22, 23) прижатыми к промежуточному рельсу (RI, RIa).
9. Установка по одному из пп. 1-8, в которой транспортер (3, 4) содержит средство (27) качения, а конструкция (10) содержит направляющую конструкцию (28), выполненную с возможностью приема средства (27) качения так, что транспортер (3, 4) может двигаться по направляющей конструкции (28).
10. Установка по одному из пп. 1-8, в которой указанный по меньшей мере один шкив (11) установлен с возможностью поворота вокруг вертикальной оси вращения (Х).
11. Установка по одному из пп. 1-8, содержащая несколько шкивов (11), последовательно установленных на конструкции (10) вдоль кривой (C1, C2) для отклонения буксирного каната (2) между двумя концами конструкции (10) и содержащая несколько приводных устройств (12), соответственно соединенных с указанными несколькими шкивами (11).
| DE 19704825 A1, 27.11.1997 | |||
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| EP 0281205 A2, 07.09.1988 | |||
| СИСТЕМА КОНТРОЛЯ ИЗНОСА, ТРАНСПОРТНАЯ УСТАНОВКА С КАНАТНЫМ ПРИВОДОМ И СПОСОБ КОНТРОЛЯ БЫСТРОИЗНАШИВАЮЩИХСЯ ДЕТАЛЕЙ ТАКОЙ ТРАНСПОРТНОЙ УСТАНОВКИ | 2009 |
|
RU2493989C2 |

