Изобретение относится к медицинской технике и предназначено для наложения механического скобочного шва при ушивании культей полых органов.
Известен хирургический сшивающий аппарат, содержащий корпус с соединенной с ним шаровым шарниром рабочей головкой, механизмом фиксации в виде винта, упорной губкой, матрицей с лунками для загиба скобок и магазином, механизм выбора зазора прошивания, толкатель и его привод [1].
Аппарат обладает возможностью изменения положения рабочей головки относительно корпуса. Это осуществляется вручную вне операционной зоны перед началом его применения. Аппарат не обладает возможностью управления положением рабочей головки во время его применения управлением извне.
Целью изобретения является возможность управления позиционированием рабочей части непосредственно в операционном пространстве с помощью привода, находящегося вне этого пространства.
Данная цель достигается тем, что аппарат снабжен дополнительным приводом позиционирования шьющей рабочей части, выполненным в виде как минимум двух шаровых шарниров одинаковых или разных диаметров, расположенных по концам неподвижного корпуса, к которым присоединяются с одной стороны управляемая шьющая рабочая часть, а с другой - привод управления, причем подвижные части шарниров соединены между собой тягами, расположенными вдоль оси аппарата, и подвижная часть одного из шарниров снабжена механизмом фиксации своего положения, еще тем, что тяги, соединяющие подвижные части шарниров, расположены параллельно оси аппарата, еще тем, что тяги, соединяющие подвижные части шарниров, занимают винтовое положение относительно оси аппарата, еще тем, что механизм фиксации положения имеет гладкий шарнир и как минимум одну подпружиненную к нему губку с фрикционным покрытием на рабочей части, еще тем, что механизм фиксации положения имеет шарнир с различными канавками на шаровой поверхности и как минимум один подпружиненный фиксатор с одной или несколькими ответными канавками или с зубцом на рабочей части.
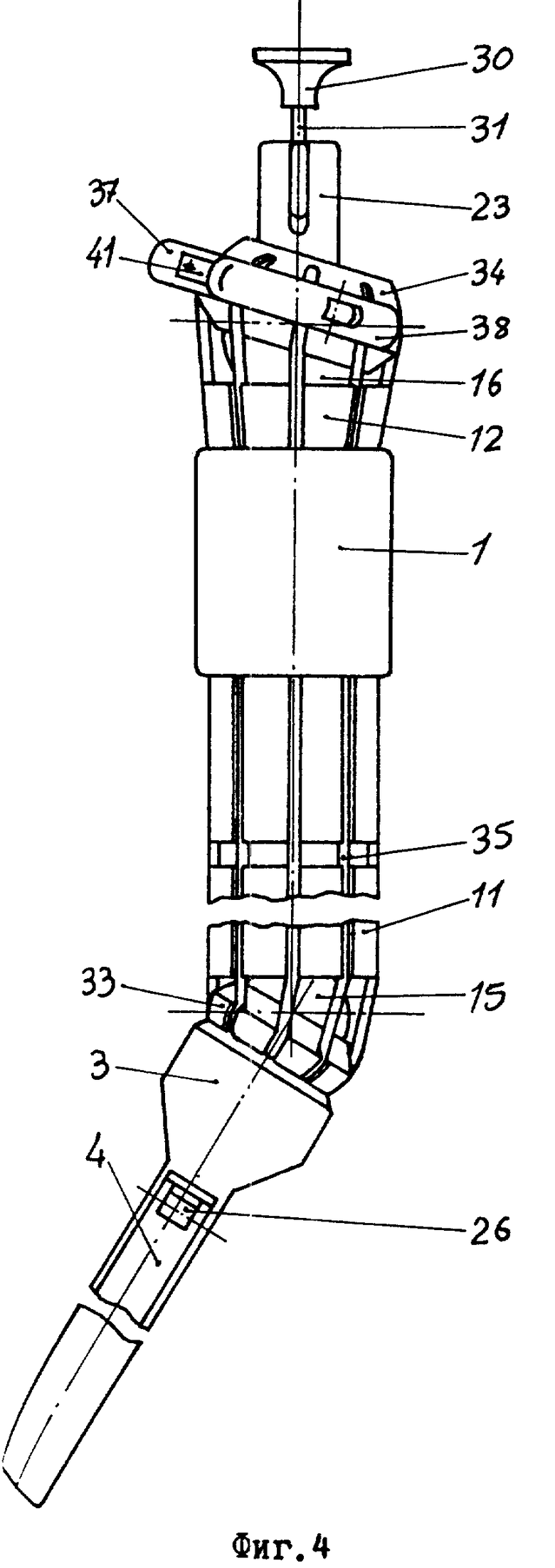
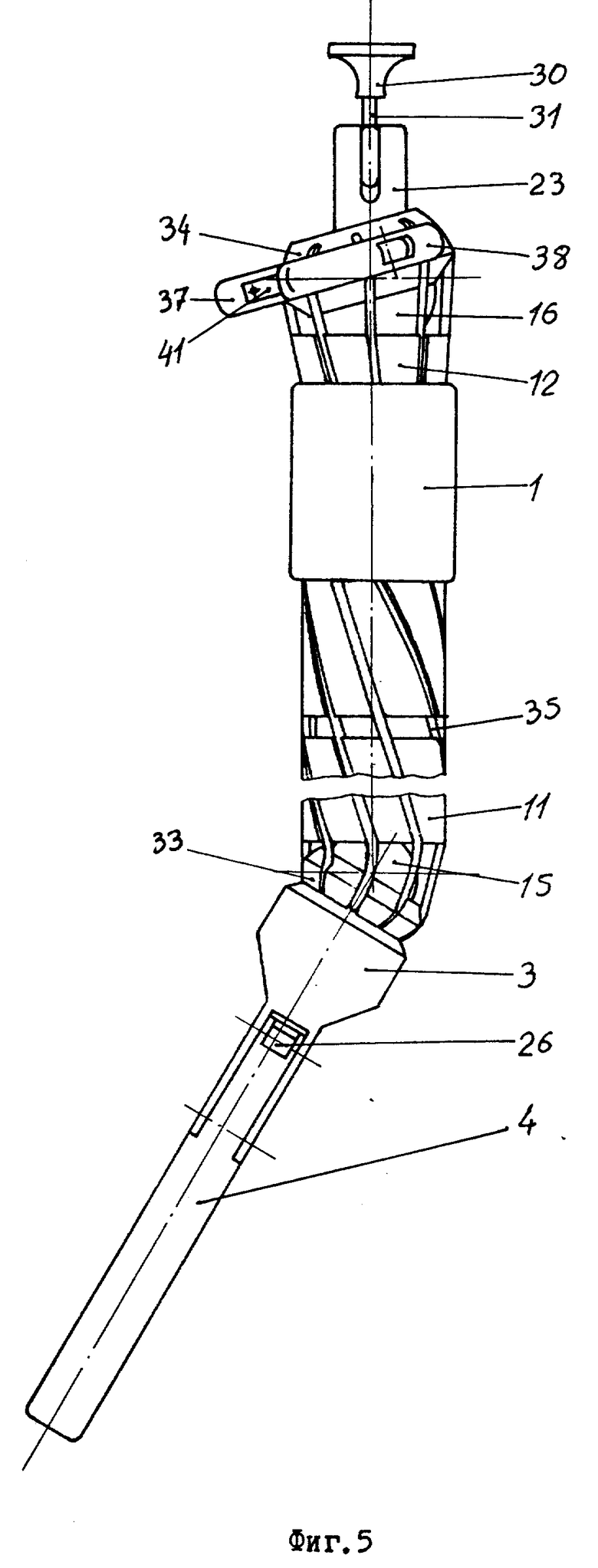
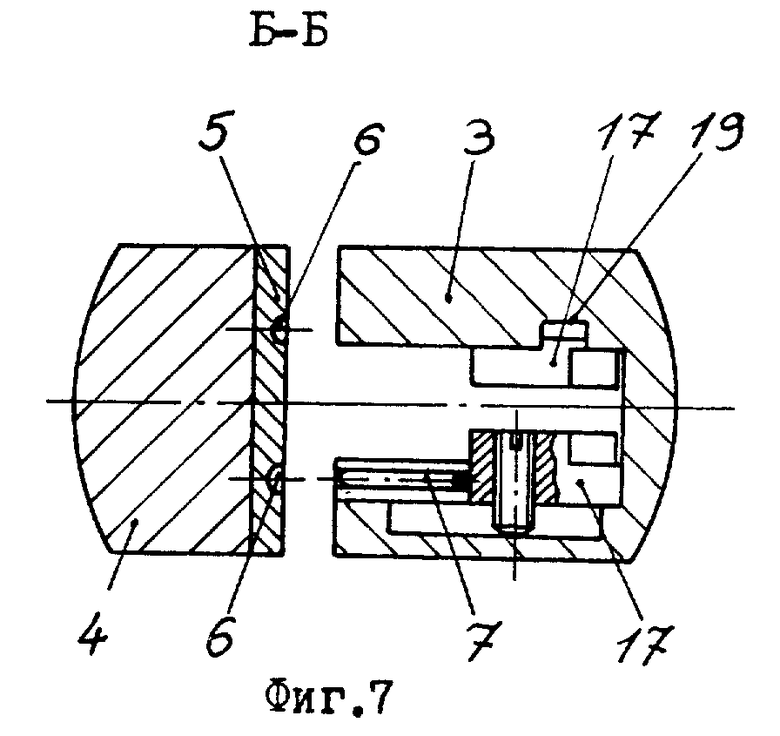
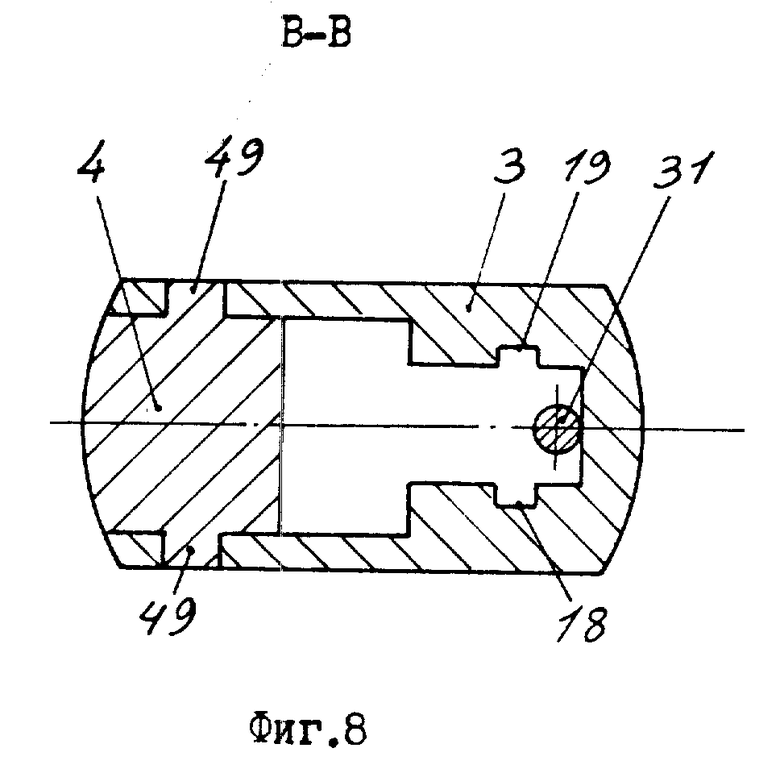
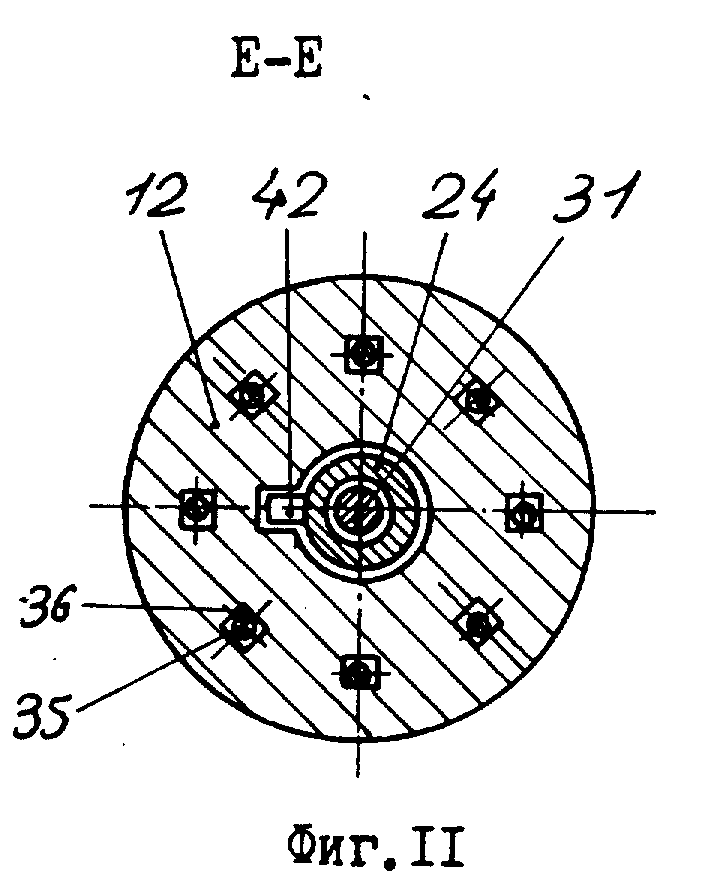
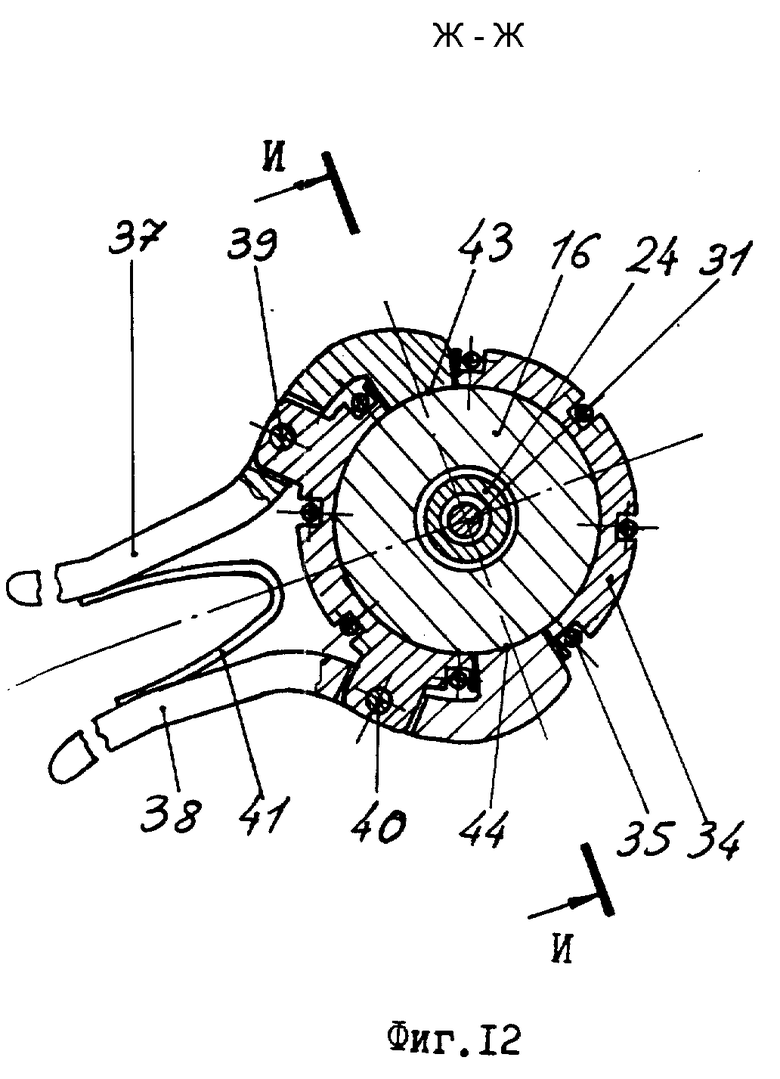
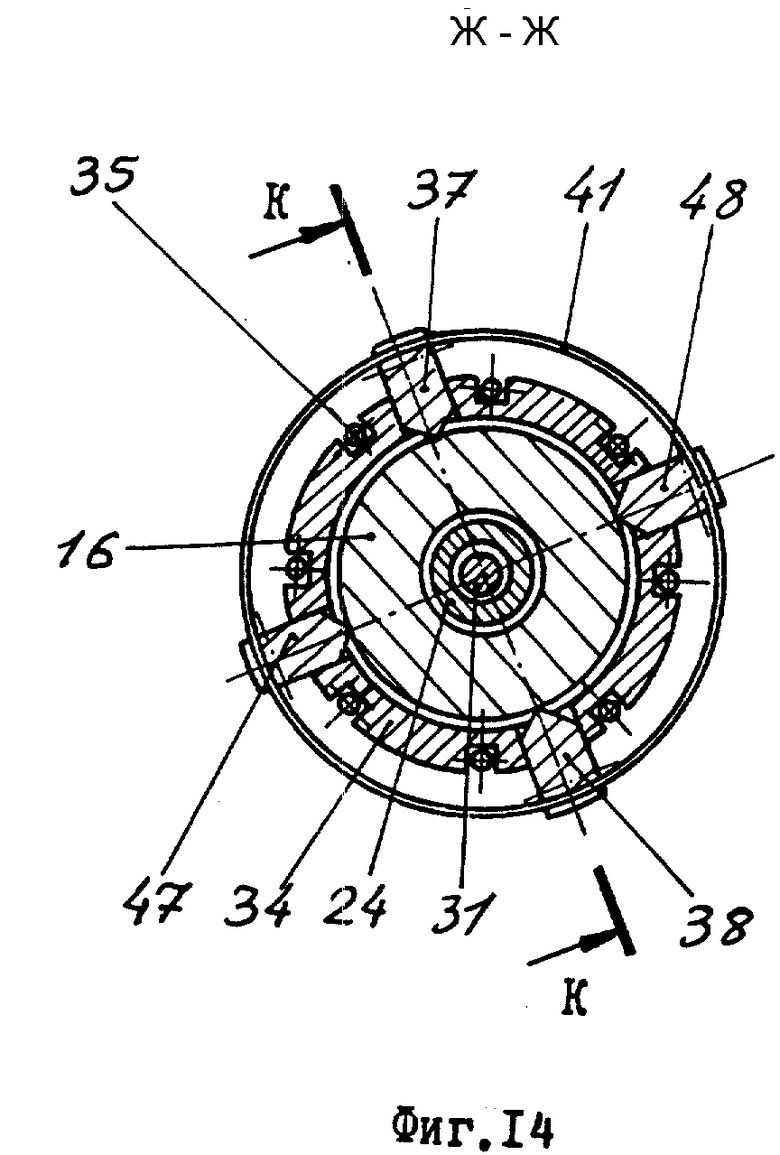
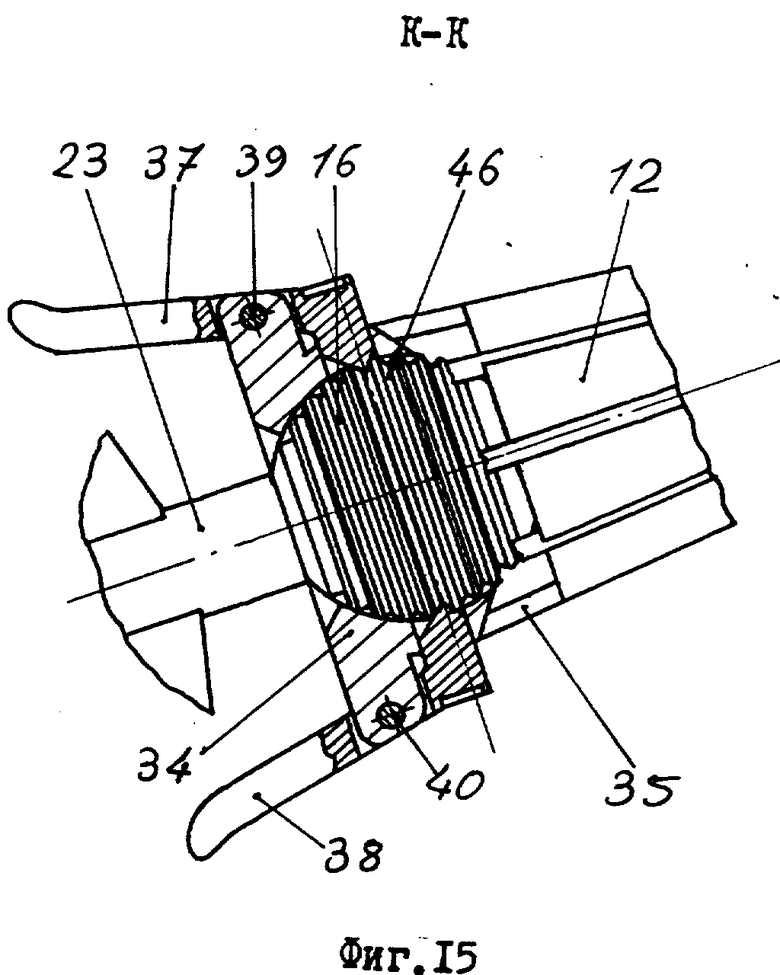
На фиг. 1 изображен хирургический сшивающий аппарат для эндоскопических операций, вид сбоку; на фиг.2 - шьющая часть аппарата в раскрытом состоянии, вид сбоку; на фиг.3 - аппарат, вид сверху; на фиг.4 - аппарат с расположением тяг параллельно оси, привод управления и шьющая рабочая часть в крайнем отведенном положении, вид сверху; на фиг.5 - аппарат с тягами, расположенными винтообразно к оси корпуса, привод управления и шьющая рабочая часть в крайнем отведенном положении, вид сверху; на фиг.6 - разрез А-А на фиг.1; на фиг.7 - разрез Б-Б на фиг.1; на фиг.8 - разрез В-В на фиг.1; на фиг.9 - разрез Г-Г на фиг.1; на фиг.10 - разрез Д-Д на фиг.1; на фиг.11 - разрез Е-Е на фиг.1; на фиг.12 - разрез Ж-Ж на фиг.1, шарнир с гладкой шаровой поверхностью; на фиг.13. - разрез И-И на фиг.12; на фиг.14 - разрез Ж-Ж на фиг.1, шарнир с канавками на шаровой поверхности; на фиг.15 - разрез К-К на фиг.14.
Аппарат содержит скобочный корпус 1, шьющую рабочую часть 3, укрепленную на ней упорную губку 4 с матрицей 5 с лунками 6 для загиба скобок 7, гибкий механизм 8 сведения упорной губки 4, гибкий механизм прошивания 9 и привод 10 позиционирования рабочей части.
Скобочный корпус 1 выполнен составным из передней 11 и задней 12 частей, удерживаемых от взаимного проворота штифтом 13. На концах передней 11 и задней 12 частях скобочного корпуса 1 располагаются сферические части переднего 15 и заднего 16 шаровых шарниров.
Управляемая шьющая рабочая часть 3 выполнена корытообразного сечения и содержит канавки для размещения скобок 7 П-образной формы и толкателей 17, пазы 18 и 19 для удержания и направления клина 20, и пазы 21 и 22.
Гибкий механизм 8 сведения упорной губки 4 содержит гайку-барашек 23, полый винт 24 с гибкой тягой 25 и шатун 26 с выступами 27 и 28, соединенный с упорной губкой 4 осью 29. Выступы 27 и 28 шатуна 26 располагаются в пазах 21 и 22 управляемой шьющей рабочей части 3.
Гибкий механизм 9 прошивания содержит рукоятку 30, гибкую тягу 31 с укрепленным на ней крюком 32 и клин 20.
Привод 10 позиционирования шьющей рабочей части 3 содержит расположенные на сферических поверхностях шаровых шарниров 15 и 16 с возможностью вращения в любой плоскости подвижные переднюю 33 и заднюю 34 части, причем подвижная часть переднего шарового шарнира 15 выполнена заодно со шьющей рабочей частью 3. Передняя 33 и задняя 34 подвижные части шаровых шарниров 15 и 16 соединены тягами 35, которые располагаются в канавках 36 скобочного корпуса 1.
Подвижная часть 34 шарового шарнира 16 имеет механизм фиксации, содержащий губки 37 и 38, закрепленные на осях 39 и 40, и пружину 41.
Аппарат работает следующим образом.
Гайку-барашек 23 вращают по часовой стрелке. При этом полый винт 24, имеющий правую резьбу и удерживаемый от проворота относительно скобочного корпуса 1 штифтом 42, перемещается вперед и толкает гибкую тягу 25, которая в свою очередь толкает вперед нижнюю часть шатуна 26. Шатун 26 своими выступами 27 и 28 скользит в пазах 21 и 22 вдоль оси скобочного корпуса аппарата. Верхний конец шатуна 26 при этом совершает вращательное движение, опускаясь вниз, и отводит упорную губку 4 от шьющей рабочей части 3, с которой она связана осью 49. В канавки для размещения скобок шьющей рабочей части 3 вставляются П-образные металлические скобки 7. При этом клин 20 находится в переднем положении, а толкатели 17 - в нижнем положении в пазах шьющей рабочей части 3. После этого, вращением гайки-барашка 23 в обратную сторону сводят упорную губку 4 со шьющей рабочей частью 3. В таком положении аппарат готов к применению.
Во время ушивания какого-либо полного органа при эндоскопической операции аппарат в сведенном состоянии подводится к органу через узкий канал в окружающих его тканях. Вращением гайки-барашка 23 отводят упорную губку 4 от шьющей рабочей части 3.
Для правильного расположения шва на органе шьющую рабочую часть 3 устанавливают в нужном положении управлением извне.
Для этого сжимают губки 37 и 38 механизма фиксации, установленные на подвижной части 34 заднего шарового шарнира 16. Поворачивая подвижную часть 34 заднего шарового шарнира 16, заставляют перемещаться тяги 35 вдоль скобочного корпуса 1 аппарата. Тяги 35 связаны в свою очередь с подвижной частью 33 переднего шарового шарнира 15, которая выполнена заодно со шьющей рабочей частью 3. Поэтому угловое перемещение подвижной части 34 заднего шарового шарнира 16 передается через тяги 35 на подвижную часть 33 переднего шарового шарнира 15 и на шьющую рабочую часть 3. Так как шарниры 15 и 16 выполнены шаровыми, а тяги 35 расположены со всех сторон скобочного корпуса 1, шьющая рабочая часть 3 может поворачиваться в любую сторону. После установки шьющей части 3 губки 37 и 38 отпускают, и под действием пружины 41 они прижимаются к шаровой поверхности шарнира 16. Так как прилегающие к шарниру поверхности губок 37 и 38 обладают хорошими фрикционными свойствами, они надежно фиксируют установленное положение подвижной части 34 заднего шарового шарнира 16.
Фиксация положения подвижной части 34 заднего шарового шарнира 16 может также производиться с помощью нанесенных на сферической поверхности шарового шарнира 16 канавок 46 различной конфигурации. На губках 37, 38, 47, 48, охватывающих шаровой шарнир 16, имеются или зубцы, или ответные канавки, которые входят в канавки 46 при воздействии на губки 37, 38, 47, 48 кольцевой пружины 41.
Шаровые шарниры 15 и 16 могут быть выполнены с одинаковыми или разными диаметрами, что позволяет осуществлять масштабирование угловых перемещений их подвижных частей 33 и 34. Если шарниры 15 и 16 выполнены с разными диаметрами, то при отклонении подвижной части 34 заднего шарового шарнира 16 на один угол, подвижная часть 33 переднего шарового шарнира 15 отклонится на другой угол.
Руководящая пружина 14 разводит в противоположные стороны переднюю 11 и заднюю 12 части скобочного корпуса 1 для натяжения тяг 35.
Если тяги 35 расположить параллельно оси скобочного корпуса 1 аппарата, то при отклонении подвижной части 34 заднего шарнира 16 в одну сторону (например, вправо), шьющая рабочая часть 3 будет отклоняться в противоположную сторону (например, влево).
Если тяги 35 расположить относительно скобочного корпуса 1 винтообразно с поворотом их концов на 180o на противоположных концах корпуса, то при отклонении подвижной части 34 заднего шарового шарнира 16 в одну сторону, скобочная рабочая часть 3 будет отклоняться в ту же сторону, что облегчает контроль и управление позиционированием.
После фиксации полученного углового положения шьющей рабочей части 3 ушиваемый орган захватывается между ней и упорной губкой 4. Это осуществляется следующим образом. Вращением гайки-барашка 23 полый винт 24 перемещается назад, втягивая за собой гибкую тягу 25. Гибкая тяга 25 тянет за собой шатун 26, который, занимая вертикальное положение, заставляет упорную губку 4 поворачиваться вокруг оси 49 в сторону скобочной части шьющей рабочей части 3.
После захвата ушиваемого органа производится прошивание. Рукоятку 30 втягивают назад вместе с гибкой тягой 31. Тяга 31 с помощью крюка 32 перемещает назад клин 20. Клин 20 перемещается в пазах 18 и 19 и воздействует на толкатели 17, заставляя их перемещаться в сторону упорной губки 4. Толкатели 17 выталкивают П-образные скобки 7 в сторону матрицы 5. С помощью лунок 6 на матрице 5 скобки деформируются в В-образную форму, образуя швы на ткани органа.
После прошивания аппарат раскрывается так, как было описано выше, и прошитая ткань высвобождается. Затем шьющая рабочая часть 3 и упорная губка 4 опять сводятся, шьющая рабочая часть 3 возвращается в положение, когда ее ось становится параллельной оси скобочного корпуса 1 аппарата, и аппарат извлекается из оперируемой полости.
Аппарат накладывает один двухрядный шов. И он может быть выполнен в варианте для однократного применения.
Аппарат может быть использован как при эндоскопических операциях, так и при операциях в труднодоступном глубоком операционном поле и при открытом хирургическом вмешательстве.
Источники информации:
1. Авторское свидетельство СССР N 1549833, кл. A 61 B 17/11, 1990.
| название | год | авторы | номер документа |
|---|---|---|---|
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ ДЛЯ НАЛОЖЕНИЯ ЛИНЕЙНЫХ ШВОВ НА ПОЛЫЕ ОРГАНЫ | 1993 |
|
RU2088159C1 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ ДЛЯ НАЛОЖЕНИЯ МЕХАНИЧЕСКОГО ОБВИВНОГО ШВА | 1993 |
|
RU2106816C1 |
| ХИРУРГИЧЕСКИЙ СШИВАТЕЛЬ ДЛЯ ЭНДОСКОПИЧЕСКИХ ОПЕРАЦИЙ | 2009 |
|
RU2437622C2 |
| АППАРАТ ДЛЯ НАЛОЖЕНИЯ ПОГРУЖНЫХ ШВОВ П-ОБРАЗНЫМИ | 1965 |
|
SU176037A1 |
| Хирургический аппарат для наложения линейных швов | 1984 |
|
SU1225541A1 |
| Резьбонарезная головка | 1982 |
|
SU1228985A1 |
| УСТРОЙСТВО ДЛЯ ФОРМООБРАЗОВАНИЯ РИФЛЕНИЙ НА СКОБКАХ П-ОБРАЗНОЙ ФОРМЫ | 1999 |
|
RU2176484C2 |
| ХИРУРГИЧЕСКИЙ АППАРАТ ДЛЯ УШИВАН ОРГАНОВ | 1972 |
|
SU354852A1 |
| Хирургический сшивающий аппарат для наложения анастомозов на полые органы | 1988 |
|
SU1560137A1 |
| Комплект резьбонакатных роликов | 1987 |
|
SU1433604A1 |






Хирургический сшивающий аппарат для эндоскопических операций относится к медицинской технике и может быть использован для наложения механического скобочного шва при ушивании культей полых органов. Скобочный корпус 1 снабжен дополнительным приводом позиционирования шьющей рабочей части 3, выполненной с упорной губкой 4, имеющей матрицу 5 с лунками 6 для загиба скобок 7. Дополнительный привод имеет как минимум два шаровых шарнира 15,16 одинаковых или разных диаметров, расположенных по концам скобочного корпуса 1. Подвижные части шарниров 15,16 соединены между собой тягами 25,35 , расположенными вдоль оси аппарата. Подвижная часть шарнира 16 снабжена механизмом фиксации своего положения. В результате достигается возможность управления позиционированием рабочей части 3 непосредственно в операционном пространстве с помощью привода, находящегося во вне этого пространства. 4 з.п. ф-лы, 15 ил.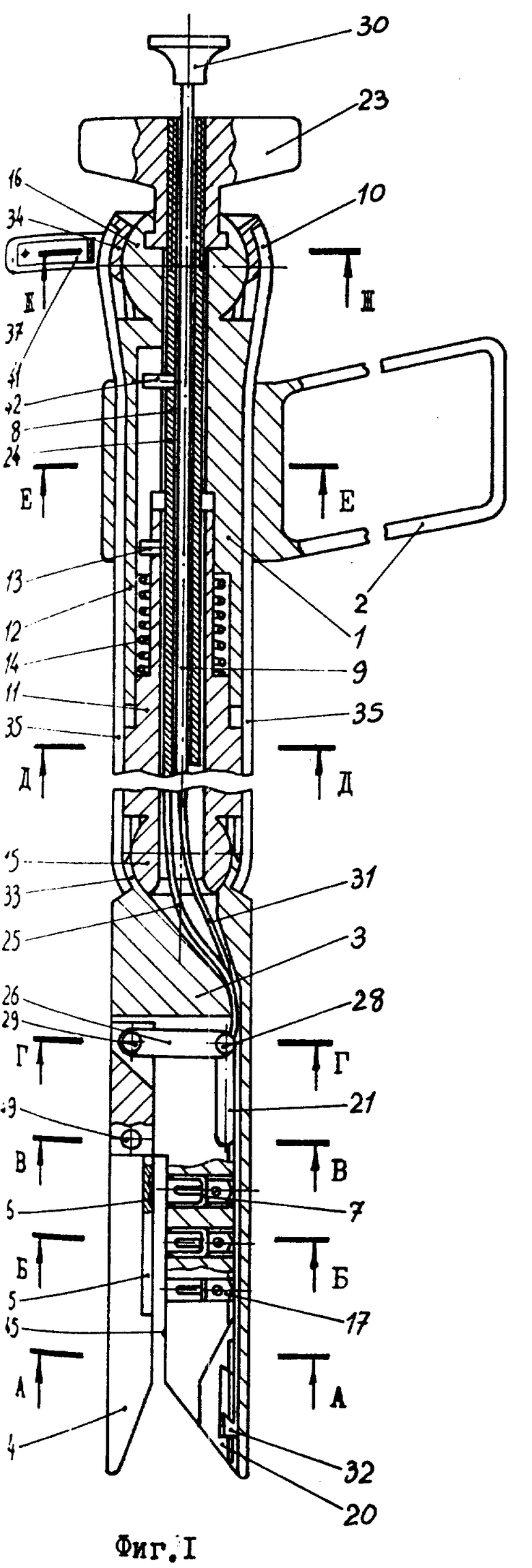
| Хирургический сшивающий аппарат | 1988 |
|
SU1549833A1 |
| US 4566620, (David T.Green и др.), 28.01.86, A 61 B 17/04, B 23 C 3/00 | |||
| Хирургический сшивающий аппарат | 1986 |
|
SU1561964A1 |
