(54) УСТРОЙСТВО ПРЕЦИЗИОННОГО ПОЗИЦИРОВАНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИБРОСТЕНД | 1996 |
|
RU2118806C1 |
| МОБИЛЬНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ МИКРОРОБОТ | 1999 |
|
RU2164362C2 |
| Двухкоординатный стол | 1980 |
|
SU948603A1 |
| Устройство для ориентации подложек | 1980 |
|
SU917365A1 |
| БЛОК ПРЕОБРАЗОВАТЕЛЕЙ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2011 |
|
RU2458321C1 |
| Координатный вибропривод | 1979 |
|
SU851563A1 |
| Трехкомпонентный пьезоэлектрический акселерометр | 1978 |
|
SU667926A1 |
| Интерферометр для измерения линейных перемещений объектов | 1987 |
|
SU1497451A1 |
| Устройство для точной установки положения объекта | 1978 |
|
SU783892A2 |
| ИСПОЛНИТЕЛЬНАЯ СИСТЕМА ПРОГРАММНО-АППАРАТНОГО КОМПЛЕКСА ДЛЯ ФОРМИРОВАНИЯ РЕЗАНИЕМ ДИСКРЕТНЫХ ПРОФИЛЬНЫХ СТРУКТУР РИСУНКА ГРАВЮРЫ В ФУНКЦИОНАЛЬНОМ СЛОЕ ПЕЧАТНОЙ ФОРМЫ | 2007 |
|
RU2360771C2 |
1
Изобретение относится к приборостроению а именно к устройствам точногопозицирова- . ния, и может быть испо 1ьзовано. в устройствах требующих прецизионного перемещения изделий в координатно-измерительных приборах, в оптико-механических приборах, в робототехнике и т.д.
Известно устройство для прецизионного перемещения изделий, содержащее основание, объект позицирования я пьезоэлектрический привод 1 .
Недостатком устройства йвляется его относительная сложность, поскольку для перемещения по каяодой из координатных осей используется самостоятельный пьезопривод.
Известно также устройство прецизионного позицярования, содержащее основание, объект позицирования и пьезозлектрический привод 12.
В известном устройстве пьезоэлектрические преобразователи привода перемещаются вместе с объектом позицнрования и прижать к нему пружинами, установленными неподвижно относительно основания. Это приводит к ограни- чеяию хода перемещения и к зависимости пара2
метров позицирования от вешгшны перемещения. Кроме того, позицирование возможно толькь по трем координатам. Все это ограничивает функциональные возможности устройства.
Цель изобретения - расщирение функциональных возможностей путем обеспечения позицирования по пяти степеням свободы.
Поставленная цель достигается тем, что в устройстве прецизионного позицирования, содержащем основание, объект позицирования и
10 пьезоэлектрический i привод, объект позицироваиия вьшолнен в виде щара, снабженного каналами управления с кубической полостью в центре, а привод вьшолнен в виде пьезокерамического вибратора в форме куба, который
IS расположен с зазорами по трем координатам в указанной полости.
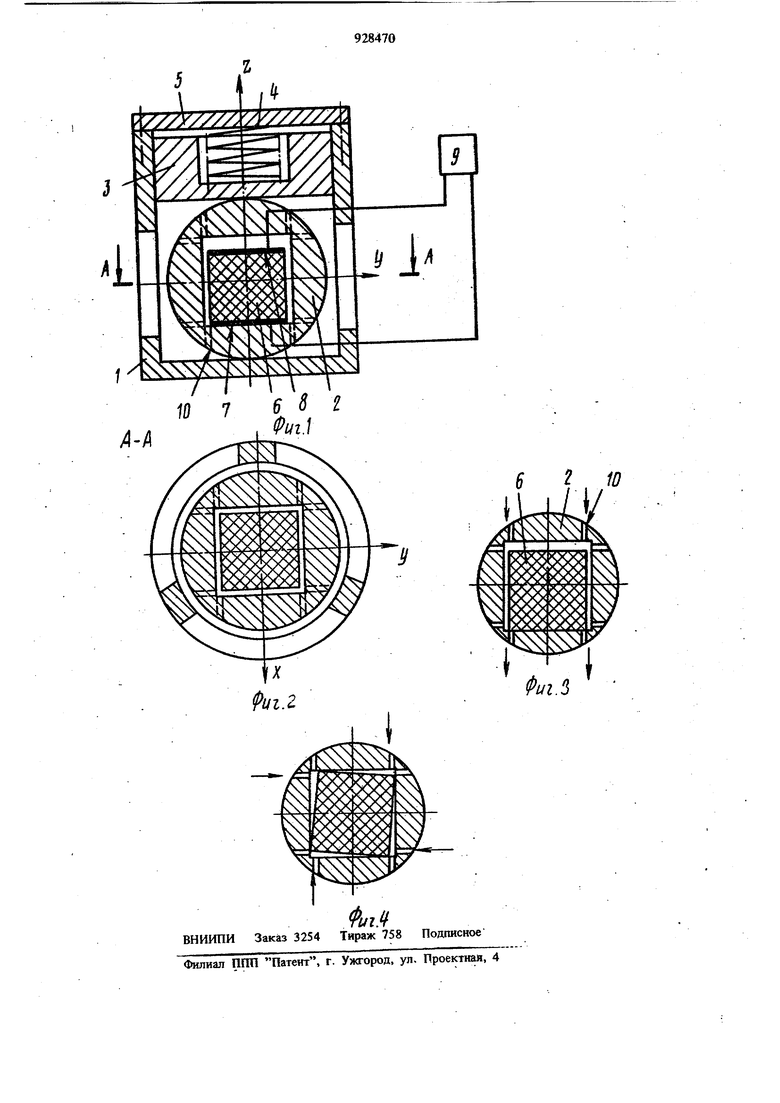
На фиг. 1 изображено устройство, вертикальный разрез; на фиг. 2 - разрез, А-А на фиг. 1; на фиг. 3 и 4 - положение пьезоэлектри20ческого привода при повороте объекта.
В корпусе 1 расположен объект познцирования 2, упруго поджатый к основанию корпу са 1 через втулку 3 и пружину 4 крышкой 5. Объект позицирования 2 выполнен в виде шара с кубической полостью в центре, в которой с определенным зазором по всем трем координатам располагается пьезоэлектрический вибратор 6, имеющий форму куба, поляризованного по «аправлению, перпендикулярному направлению нанесенных на две его параллельные грани электродов 7 и 8, которыми он подключен к генератору высокочастотных ко лебаний 9, причем в теле объекта 2 симметрич но на определенном расстоянии от граней кубической полости выполнены 24 канала управления 10. Работает устройство следующим образом. При подключении генератора 9 к пьезоэлектрическому кубическому вибратору 6 последний начинает совершать высокочастотные резонансные колебания с частотой f с 2 В где с - скорость звука в материале вибратора;В - высота куба. Вибратор 6, находясь в кубической полости позищ1руемого объекта 2, управляется, например, при помощи дискретной струйной техники, для работы которой в теле объекта выполнены 24 канала управления 10. В каждом углу кубической полости расположено по 3 канала, каждый из которых направлен по одной из координат X, У, Z (фиг. 1 и 3). Таким образом, в плоскостях, параллельных плоскости ХУ, расположено 8 каналов, и в плоскостях, пapaллeльньfx плоскостям XZ, YZ, также по 8 каналов. Прижимая вибратор 6 одной из плоскостей куба к соответствующей плоскости полости, производят генерирование импульсов в соответствующую сторону, за счет чего происходит перемещение объекта позицирования 2 в этом направлении (фиг.2). Управляя положением вибратора 6 через каналы, расположенные в плоскостях, параллель ных плоскости ХУ, получают движение объекта 2 или по оси X или по оси У, в зависимости от направления каналов управления 10, соответственно, или по X или по У. Поворот 4 объекта 2 производится несимметричным смещением вибратора 6 около оси, вокруг которой производится вращение. (фиг. 4). В этом случае возбуждаемые импульсы Создают вращающий момент, поворачивающий объект позицирования 2. Управляя положением вибратора 6 через каналы управления 10, как показаио на фиг. 4 в плоскости ХУ, получают поворот вокруг оси Z, в плоскости ZY - поворот вокруг оси X, в плоскости ZX - вокруг оси у. Таким образом, имея 24 канала joipasneifflH положением вибратора 6, можно осуществить позицирование по пяти степеням свободы, т.е. иметь десять различных движений (с учетом реверса). Позшшрование возможно только последовательно по каждой степени свободы. Чувствительность предложенного устройства очень велика, так как амплитуды колебаний малы (несколько микрометров), а частоты большие (от 20 до 200 кГц). Устройство прецизионного позицирования обеспечивает позицирование по пяти степеням свободы при относительной простоте конструкции. Формула изобретения Устройство прецизионного позицирсвания, содержащее основание, объект позицирования и пьезоэлектрический привод, отличающ е е с я тем, что, с целью расширения функциональных возможностей путем обеспечения позицирования по пяти степеням свободы, объект позицировашш вьшолнен в виде шара, снабженного каналами управлений с кубической полостью в центре, а привод выполнен в виде пьезокерамического вибратора в форме куба, который расположен с зазорами по трем координатам в указанной полости. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 674123, кл. Н 01 L 41/10, 1978. 2.Патент США N3808488, кл. 310-8.2, рпублик. 1977 (прототип).
