Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу отображения информации помощи при парковке и к устройству помощи при парковке.
Уровень техники
[0002] Относительно этого вида технологии, известна технология, которая включает в себя обнаружение места, на котором может парковаться рассматриваемое транспортное средство, и представление доступного места для парковки пользователю в соответствии с уровнем приоритета, полученным с использованием предварительно зарегистрированной уникальной информации рассматриваемого транспортного средства и водителя (патентный документ 1).
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1. JP2009-205191A
Сущность изобретения
Задачи, решаемые изобретением
[0004] Тем не менее, патентный документ 1 не раскрывает способ отображения, когда место для парковки, которое должно представляться водителю, изменяется. Ввиду этого, проблема заключается в том, что отображение места для парковки может внезапно изменяться по мере того, как рассматриваемое транспортное средство перемещается.
[0005] Проблема, которая должна разрешаться посредством настоящего изобретения, заключается в том, чтобы предотвращать внезапное изменение отображения места для парковки по мере того, как рассматриваемое транспортное средство перемещается.
[0006] Настоящее изобретение разрешает вышеуказанную проблему посредством отображения первого места для парковки, которое удовлетворяет условию парковки, в первой форме для отображения на дисплее, и когда оценивается или обнаруживается то, что первое место для парковки не будет удовлетворять условию парковки, или второе место для парковки, отличное от первого места для парковки, будет удовлетворять условию парковки, отображения первого места для парковки во второй форме для отображения, отличающейся от первой формы для отображения.
[0007] Согласно настоящему изобретению, когда оценивается или обнаруживается то, что место для парковки, подходящее для парковки, будет изменяться, изменяется форма для отображения, и ввиду этого водитель может уведомляться в отношении изменения места для парковки, подходящего для парковки. Как следствие, можно обеспечивать время для определения места для парковки.
Краткое описание чертежей
[0008] Фиг. 1 является блок-схемой, иллюстрирующей пример системы помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 2 является блок-схемой последовательности операций способа, иллюстрирующей пример процедуры управления в системе помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 3 является видом, иллюстрирующим пример позиций, в которых размещаются бортовые камеры согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 4A является первым видом для описания примера процесса помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 4B является вторым видом для описания примера процесса помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 4C является третьим видом для описания примера процесса помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 4D является четвертым видом для описания примера процесса помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 5 является графиком, иллюстрирующим взаимосвязь между скоростью транспортного средства (V (км)) и расстоянием до точки взгляда (Y (м)).
Фиг. 6 является набором видов, иллюстрирующих примеры шаблонов (A), (B) и (C) парковки, к которым применяется процесс помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 7A является первым видом, иллюстрирующим пример информации помощи при парковке, представленной в процессе помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 7B является вторым видом, иллюстрирующим пример информации помощи при парковке, представленной в процессе помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 8A является схемой, иллюстрирующей первый пример процесса управления для формы для отображения места для парковки.
Фиг. 8B является схемой, иллюстрирующей второй пример процесса управления для формы для отображения места для парковки.
Фиг. 9A является набором видов, в которых часть (a) иллюстрирует пример первой формы для отображения, и часть (b) иллюстрирует примеры второй формы для отображения.
Фиг. 9B является набором видов, в которых часть (a) иллюстрирует пример третьей формы для отображения, и часть (b) иллюстрирует примеры четвертой формы для отображения.
Осуществление изобретения
[0009] Далее описываются один или более вариантов осуществления настоящего изобретения со ссылками на чертежи. В вариантах осуществления, настоящее изобретение описывается посредством примерной иллюстрации примера, в котором устройство помощи при парковке согласно настоящему изобретению применяется к системе помощи при парковке, оснащенной в транспортном средстве. Устройство помощи при парковке может применяться к портативному терминальному устройству (такому оборудованию, как смартфон и карманный персональный компьютер, PDA), выполненному с возможностью обмена информацией с бортовыми устройствами. Способ отображения информации помощи при парковке согласно настоящему изобретению может использоваться в устройстве помощи при парковке. Информация помощи при парковке, связанная с изобретением этого способа отображения, в частности, отображается с использованием дисплея 21.
Устройство 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения также может иметь полуавтоматический тип, в котором операция руления автоматически выполняется в то время, когда водитель выполняет операцию нажатия педали акселератора/тормоза. Помимо этого или альтернативно, устройство 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения может иметь тип с дистанционным управлением, в котором транспортное средство без водителя паркуется на предварительно определенном месте для парковки посредством управления перемещением транспортного средства от внешнего оператора.
[0010] Фиг. 1 является блок-схемой системы 1000 помощи при парковке, имеющей устройство 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения. Система 1000 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения помогает при операции перемещения (парковки) рассматриваемого транспортного средства на месте для парковки. Система 1000 помощи при парковке включает в себя камеры 1a-1d, устройство 2 обработки изображений, устройство 3 измерения дальности, устройство 4 выдачи уведомлений, устройство 100 помощи при парковке, контроллер 30 транспортного средства, приводную систему 40, датчик 50 угла поворота при рулении и датчик 60 скорости транспортного средства. Устройство 100 помощи при парковке включает в себя устройство 10 управления и устройство 20 вывода.
[0011] Устройство 20 вывода включает в себя дисплей 21. Устройство 4 выдачи уведомлений включает в себя динамик 41, лампу 42 и генератор 43 вибраций. Эти компоненты соединяются друг с другом через контроллерную сеть (CAN) или другую бортовую LAN, чтобы взаимно обмениваться информацией. Устройство 20 вывода информирует водителя в отношении информации помощи при парковке. Дисплей 21 уведомляет водителя в отношении информации помощи при парковке в соответствии с содержанием текста, содержанием выводимого изображения и/или формой выводимого изображения. Дисплей 21 согласно одному или более вариантов осуществления настоящего изобретения представляет собой дисплей с сенсорной панелью, имеющий функцию ввода и функцию вывода. Динамик 41 уведомляет водителя в отношении информации помощи при парковке в соответствии с содержанием текста, содержанием голоса или звука и/или формой голоса или звука. Лампа 42 уведомляет водителя в отношении информации помощи при парковке в соответствии с присутствием или отсутствием мигания и/или формой мигания. Генератор 43 вибраций, который предоставляется в механизме рулевого управления, на поверхности посадки водительского сиденья или в таком месте, чтобы находиться в контакте с водителем, передает информацию помощи при парковке в соответствии со сформированной вибрацией водителю. Генератор 43 вибраций уведомляет водителя в отношении информации помощи при парковке в соответствии с формой вибрации, к примеру, присутствием или отсутствием вибрации и периодом вибрации.
[0012] Устройство 10 управления устройства 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения представляет собой конкретный компьютер, содержащий ROM (постоянное запоминающее устройство) 12, которое сохраняет программу помощи при парковке, CPU (центральный процессор) в качестве функциональной схемы, которая выполняет программу, сохраненную в ROM 12, так что он служит в качестве устройства 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения, и RAM (запоминающее устройство с произвольным доступом) 13, которое служит в качестве доступного устройства хранения данных. Программа помощи при парковке включает в себя программу процесса отображения для информации помощи при парковке.
[0013] Программа помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения представляет собой программу для выполнения процедуры управления для представления информации помощи при парковке, которая включает в себя информацию относительно доступных мест для парковки, на дисплее 21 и помощи при операции парковки рассматриваемого транспортного средства V на месте для парковки, заданном водителем. В программе помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения, место для парковки для парковки может автоматически задаваться.
Устройство 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения может применяться к системе автоматизированной парковки, с помощью которой транспортное средство автоматически паркуется посредством операций руления, акселератора и тормоза, а также может применяться к системе полуавтоматизированной парковки, с помощью которой часть операций руления, акселератора и тормоза выполняется вручную, а другие операции выполняются автоматически. В другом варианте осуществления настоящего изобретения, устройство 100 помощи при парковке может применяться к системе, которая помогает парковке посредством представления намеченного пути на место для парковки и навигации на основе инструкций рассматриваемого транспортного средства на место для парковки.
[0014] Устройство 10 управления устройства 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения имеет функции выполнения процесса получения информации, процесса обнаружения доступных мест для парковки, процесса обнаружения рекомендованных мест для парковки, процесса управления отображением и процесса управления парковкой. Каждый из вышеуказанных процессов выполняется посредством взаимодействия программного обеспечения для реализации процесса и вышеописанных аппаратных средств.
[0015] Фиг. 2 является блок-схемой последовательности операций способа, иллюстрирующей процедуру управления процесса помощи при парковке, выполняемого посредством системы 1000 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения. Триггер для начала процесса помощи при парковке не ограничен конкретным образом, и процесс помощи при парковке может быть инициирован посредством операции пускового переключателя устройства 100 помощи при парковке.
[0016] Устройство 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения имеет функцию для автоматического перемещения рассматриваемого транспортного средства V на место для парковки. В этом процессе согласно одному или более вариантов осуществления настоящего изобретения, используется переключатель, к примеру, переключатель автоблокировки, который включается только при нажатии. В устройстве 100 помощи при парковке, когда переключатель автоблокировки нажимается, выполняется автоматизированное вождение рассматриваемого транспортного средства V, и когда нажатие переключателя автоблокировки прекращается, автоматизированное вождение рассматриваемого транспортного средства V приостанавливается. Устройство ввода согласно одному или более вариантов осуществления настоящего изобретения может располагаться в качестве бортового устройства в салоне транспортного средства. Помимо этого или альтернативно, устройство ввода может быть сконфигурировано как портативное устройство, которое может носиться за пределами салона транспортного таким образом, что рассматриваемое транспортное средство V может управляться посредством внешнего оператора.
[0017] На этапе 101, устройство 10 управления устройства 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения получает изображения, захваченные посредством камер 1a-1d, присоединяемых к нескольким местам рассматриваемого транспортного средства V. Камеры 1a-1d захватывают изображения граничных линий мест для парковки рядом с рассматриваемым транспортным средством V и объектов, присутствующих вокруг мест для парковки. Камеры 1a-1d могут представлять собой CCD-камеры, камеры для съемки в инфракрасном диапазоне или другие соответствующие устройства формирования изображений. Устройство 3 измерения дальности может предоставляться в позиции, идентичной позиции любой из камер 1a-1d, или также может предоставляться в другой позиции. Устройство 3 измерения дальности может представлять собой радарное устройство, такое как радар миллиметрового диапазона, лазерный радар и ультразвуковой радар или сонар. Устройство 3 измерения дальности обнаруживает присутствие или отсутствие объектов, позиции объектов и расстояния до объектов на основе принимаемого сигнала радарного устройства. Такие объекты включают в себя помехи, пешеходов и другие транспортные средства вокруг транспортного средства. Принимаемый сигнал используется для того, чтобы определять то, представляет собой место для парковки или нет незанятое место (паркуется или нет транспортное средство на месте для парковки). Помехи могут обнаруживаться с использованием стереотехнологии движения посредством камер 1a-1d.
[0018] Фиг. 3 является видом, иллюстрирующим примерную компоновку камер 1a-1d, расположенных на рассматриваемом транспортном средстве V. В примере, проиллюстрированном на фиг. 3, камера 1a располагается в части решетки радиатора рассматриваемого транспортного средства V, камера 1d располагается около заднего бампера, и камеры 1b и 1c располагаются в нижних частях правого и левого боковых зеркал. Камеры 1a-1d могут представлять собой камеру, имеющую широкоугольную линзу с широким углом обзора.
[0019] На этапе 101, устройство 10 управления также получает сигналы измерения дальности из устройства 3 измерения дальности, которое может представлять собой множество модулей, присоединенных к нескольким местам рассматриваемого транспортного средства.
[0020] На этапе 102, устройство 10 управления устройства 100 помощи при парковке управляет устройством 2 обработки изображений таким образом, чтобы формировать снятое сверху изображение. На основе полученного множества захваченных изображений, устройство 2 обработки изображений формирует снятое сверху изображение, в котором окружающее состояние, включающее в себя рассматриваемое транспортное средство V и место для парковки для парковки рассматриваемого транспортного средства V, просматривается из виртуальной точки P обзора (см. фиг. 3) выше рассматриваемого транспортного средства V. Обработка изображений, выполняемая посредством устройства 2 обработки изображений, может проводиться, например, с использованием способа, раскрытого в работе "Development of Around View System, Proceedings of Society of JSAE Annual Congress, 116-07 (октябрь 2007 года), стр. 17-22, SUZUKI Masayasu, CHINOMI Satoshi, TAKANO Teruhisa". Примеры сформированного снятого сверху изображения 21a проиллюстрированы на фиг. 7A и 7B, которые описываются ниже. Эти чертежи иллюстрируют пример отображения, который одновременно отображает снятое сверху изображение 21a (вид сверху) вокруг рассматриваемого транспортного средства V и изображение 21b для мониторинга (нормальный вид) вокруг рассматриваемого транспортного средства V.
[0021] Снова ссылаясь на фиг. 2, на этапах 103 и 104, устройство 10 управления обнаруживает места для парковки на основе "условия парковки", которое предварительно задается. В одном или более вариантов осуществления настоящего изобретения, ниже описывается примерный случай, в котором процесс указания доступных мест для парковки и рекомендованного места для парковки представляет собой процесс обнаружения доступных мест для парковки и рекомендованного места для парковки. В одном или более вариантов осуществления настоящего изобретения, устройство 100 помощи при парковке обнаруживает места для парковки, которые удовлетворяют "условию парковки", чтобы за счет этого указывать "доступные места для парковки" и "рекомендованное место(а) для парковки". Процессы указания "доступных мест для парковки" и "рекомендованного места для парковки" не ограничены процессом обнаружения, и "доступные места для парковки", и "рекомендованное место(а) для парковки", которые должны обрабатываться, могут указываться с использованием идентификационной информации "доступных мест для парковки" и "рекомендованного места для парковки", которые обнаруживаются посредством внешнего устройства.
[0022] Ниже описывается "условие парковки" согласно одному или более вариантов осуществления настоящего изобретения.
"Условие парковки" включает в себя "условие возможности парковки" для обнаружения доступных мест для парковки, на которых возможна парковка, и "условие рекомендации по парковке" для сокращения доступных мест для парковки до рекомендованного места для парковки, на котором парковка рекомендуется для рассматриваемого транспортного средства V. Каждое условие, описанное ниже, может использоваться отдельно в качестве "условия парковки", или комбинация двух или более из условий также может использоваться в качестве "условия парковки".
[0023] Условие парковки согласно одному или более вариантов осуществления настоящего изобретения включает в себя следующие элементы:
1. Условие обнаружения для линий парковочных рамок;
2. Условие обнаружения для мест для парковки;
3. Условие возможности парковки; и
4. Условие рекомендации по парковке.
[0024] "Условие обнаружения для линий парковочных рамок" представляет собой условие для обнаружения схемы, которая представляет места для парковки, из захваченных изображений поверхности дороги. "Условие обнаружения для мест для парковки" представляет собой условие для обнаружения мест для парковки из схемы поверхности дороги. "Условие возможности парковки" представляет собой условие для обнаружения доступных мест для парковки, на которых возможна парковка. "Условие рекомендации по парковке" представляет собой условие для сокращения доступных мест для парковки до рекомендованного места для парковки, на котором парковка рекомендуется для рассматриваемого транспортного средства V. Вышеприведенные пункты 1-3 принадлежат условию возможности парковки согласно одному или более вариантов осуществления настоящего изобретения, и элемент 4 принадлежит условию рекомендации по парковке. Эти условия могут использоваться отдельно в качестве "условия парковки", или комбинация двух или более из этих условий также может использоваться в качестве "условия парковки".
[0025] На этапе 103, устройство 10 управления обнаруживает линии парковочных рамок для того, чтобы обнаруживать места для парковки, на основе изображений, захваченных посредством камер 1a-1d, и/или данных, принимаемых посредством устройства 3 измерения дальности, и использует эти информационные элементы для того, чтобы обнаруживать доступные места Me для парковки. В одном или более вариантов осуществления настоящего изобретения, доступные места для парковки обнаруживаются из изображений, захваченных посредством камер 1a-1d, но процесс обнаружения доступных мест для парковки не ограничен конкретным образом. В альтернативном варианте осуществления, информация может получаться из внешнего сервера, чтобы обнаруживать или указывать доступные места для парковки.
[0026] Ниже описывается способ обнаружения доступных мест Me для парковки. Устройство 10 управления определяет то, движется или нет рассматриваемое транспортное средство V в зоне, которая включает в себя места для парковки (такая зона также упоминается как "зона парковки" в дальнейшем), на основе скорости транспортного средства для рассматриваемого транспортного средства V. Например, когда скорость транспортного средства для рассматриваемого транспортного средства V составляет предварительно определенное пороговое значение скорости транспортного средства или меньше, и это состояние продолжается в течение предварительно определенного времени или больше, устройство 10 управления определяет то, что рассматриваемое транспортное средство V движется в зоне парковки. Устройство 10 управления определяет то, движется или нет рассматриваемое транспортное средство V в зоне парковки, на основе атрибута позиционной информации навигационной системы (не проиллюстрирована) (такой информации, что точка включена в автомобильную парковку). Когда обнаруженная позиционная информация имеет атрибут, который представляет зону парковки, к примеру, зону, включающую в себя места для парковки шоссе, например, выполняется определение в отношении того, что рассматриваемое транспортное средство V движется в зоне парковки. В одном или более вариантов осуществления настоящего изобретения, может выполняться определение в отношении того, представляет собой обнаруженная зона или нет зону, включающую в себя места для парковки, на основе информации, полученной из устройства, расположенного за пределами транспортного средства, через связь между транспортным средством и дорожной инфраструктурой или связь между транспортными средствами.
[0027] Когда выполняется определение в отношении того, что рассматриваемое транспортное средство V движется в зоне парковки, устройство 10 управления обнаруживает сигнальные линии дорожной разметки на основе захваченных изображений, полученных для формирования снятого сверху изображения. Сигнальные линии дорожной разметки представляют граничные линии, которые задают рамки (области) мест для парковки. Устройство 10 управления выполняет обнаружение краев для захваченных изображений, чтобы вычислять яркостную разность (контрастность). Устройство 10 управления указывает пиксельную линию, имеющую яркостную разность в предварительно определенное значение или больше относительно снятого сверху изображения, и вычисляет ширину и длину линии. В одном или более вариантов осуществления настоящего изобретения, линии рамок, представляющие места для парковки, не обязательно могут быть белыми, и также могут использоваться другие цвета, такие как красный.
[0028] Устройство 10 управления обнаруживает линии, которые удовлетворяют следующему условию "1. Условие обнаружения для линий парковочных рамок", в качестве линий парковочных рамок. В одном или более вариантов осуществления настоящего изобретения, схема, которая удовлетворяет всем из (1)-(6), обнаруживается в качестве представления линий парковочных рамок. В альтернативном варианте осуществления, любые одно или более из (1)-(6) могут выбираться и применяться.
[0029] 1. Условие обнаружения для линий парковочных рамок
(1) Яркостная разность краев составляет предварительно определенное пороговое значение или больше.
(2) Угол линии составляет предварительно определенное пороговое значение или меньше.
(3) Ширина линии составляет предварительно определенное пороговое значение или меньше.
(4) Длина непрерывного края (линии) составляет предварительно определенное значение или больше.
(5) Яркостная разность шума между линиями меньше предварительно определенного порогового значения.
(6) Правдоподобность, представляющая вероятность в качестве линий парковочных рамок, вычисленных на основе значений количественной оценки/оценки вышеуказанных (1)-(5), составляет предварительно определенное значение или больше.
[0030] Устройство 10 управления обнаруживает места для парковки от возможных вариантов обнаруженных линий парковочных рамок с использованием известной технологии обработки изображений, такой как сопоставление с шаблоном. В частности, устройство 10 управления обнаруживает линии парковочных рамок, которые удовлетворяют следующему условию "2. Условие обнаружения для мест для парковки", в качестве мест для парковки. В одном или более вариантов осуществления настоящего изобретения, линии парковочных рамок, которые удовлетворяют всем из (1)-(3), обнаруживаются в качестве мест для парковки. Любые одно или более условий (1)-(3) также могут выбираться и применяться. Устройство 10 управления описывается как обнаруживающее места для парковки из возможных вариантов обнаруженных линий парковочных рамок с использованием известной технологии обработки изображений, такой как сопоставление с шаблоном, но один или более вариантов осуществления настоящего изобретения не ограничены этим, и места для парковки могут непосредственно обнаруживаться без обнаружения линий парковочных рамок. Например, незанятые места, имеющие предварительно определенный диапазон (размер), могут обнаруживаться в качестве мест для парковки, либо местоположения, в которых маневры при парковке выполнены в предыдущие разы, могут обнаруживаться в качестве мест для парковки. Если условие, которое предварительно задается для того, чтобы задавать вероятность мест для парковки, удовлетворяется, места для парковки могут непосредственно обнаруживаться без обнаружения линий парковочных рамок.
[0031] 2. Условие обнаружения для мест для парковки
(1) Линии, извлеченные в качестве возможных вариантов линий парковочных рамок, не включают в себя линию, имеющую длину, равную или большую первого порогового значения, которое предварительно задается (например, длину, соответствующую фактическому расстоянию 15 (м)).
(2) Линии, извлеченные в качестве возможных вариантов линий парковочных рамок, не включают в себя линию, имеющую длину, равную или меньшую второго порогового значения, которое предварительно задается (например, длину, соответствующую фактическому расстоянию 3-5 (м)), и пара приблизительно параллельных линий не включает в себя линию, имеющую длину, равную или большую третьего порогового значения, которое предварительно задается (например, длину, соответствующую фактическому расстоянию 7 (м)).
(3) Линии, извлеченные в качестве возможных вариантов линий парковочных рамок, не включают в себя линию, имеющую длину, равную или меньшую четвертого порогового значения, которое предварительно задается (например, длину, соответствующую фактическому расстоянию 2,5-5 (м)), и пара приблизительно параллельных линий не включает в себя линию, имеющую длину, равную или большую четвертого порогового значения, которое предварительно задается (например, длину, соответствующую фактическому расстоянию 15 (м)).
Позиционная информация мест для парковки может сохраняться таким образом, что она включена в картографическую информацию навигационной системы, либо также может получаться из внешнего сервера или устройства управления инфраструктурных объектов (автомобильных парковок).
[0032] Устройство 10 управления сохраняет "условие возможности парковки" для извлечения доступных мест Me для парковки. "Условие возможности парковки" задается с точки зрения извлечения мест для парковки, на которых возможна парковка. "Условие возможности парковки" предпочтительно задается с точки зрения расстояния от рассматриваемого транспортного средства V, с точки зрения в отношении того, паркуются или нет другие транспортные средства, и с точки зрения присутствия или отсутствия помех. На основе "условия возможности парковки", устройство 10 управления обнаруживает доступные места Me для парковки, на которых может парковаться рассматриваемое транспортное средство V. Доступные места Me для парковки представляют собой места для парковки, на которых может парковаться рассматриваемое транспортное средство V.
[0033] Фиг. 4A является первой схемой, иллюстрирующей пример процесса помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения. Как проиллюстрировано на фиг. 4A, позиция движения рассматриваемого транспортного средства представляет собой P1, и скорость транспортного средства представляет собой V1. Устройство 10 управления обнаруживает места для парковки, на которых может парковаться рассматриваемое транспортное средство V, перемещающееся в направлении стрелки (указываемой вперед относительно рассматриваемого транспортного средства V). Опорная точка для определения позиции рассматриваемого транспортного средства V может произвольно задаваться. Опорная точка может задаваться как позиция центра V0 тяжести рассматриваемого транспортного средства V, позиция переднего бампера рассматриваемого транспортного средства V или позиция заднего бампера рассматриваемого транспортного средства V.
[0034] После обнаружения мест для парковки, устройство 10 управления сначала обнаруживает незанятые места для парковки с использованием обнаруживаемых данных из устройства 3 измерения дальности/устройства 2 обработки изображений.
[0035] 3. Условие возможности парковки
"Условие возможности парковки" согласно одному или более вариантов осуществления настоящего изобретения задается с точки зрения извлечения мест для парковки, на которых может парковаться рассматриваемое транспортное средство V.
(1) Расстояние находится в пределах предварительно определенного расстояния от рассматриваемого транспортного средства V.
(2) Место для парковки является незанятым.
(3) Помехи не присутствуют.
[0036] Устройство 10 управления определяет то, присутствуют или нет помехи на местах для парковки. В зоне парковки, проиллюстрированной на фиг. 4A, устройство 10 управления не обнаруживает места PR1, PR4, PR6 и PL3 для парковки в качестве доступных мест Me для парковки, поскольку другие транспортные средства паркуются на них. Аналогично, устройство 10 управления не обнаруживает место PR8 для парковки в качестве доступного места Me для парковки, поскольку помеха M1 присутствует на нем.
[0037] Устройство 10 управления обнаруживает место для парковки, на которое может перемещаться рассматриваемое транспортное средство V. Когда намеченный путь для перемещения рассматриваемого транспортного средства V на место для парковки может извлекаться, устройство 10 управления определяет то, что рассматриваемое транспортное средство V может парковаться на месте для парковки. Фиг. 4A иллюстрирует намеченный путь L, когда рассматриваемое транспортное средство V паркуется посредством автоматизированного вождения. Намеченный путь L представляет собой намеченный путь, по которому рассматриваемое транспортное средство V перемещается из текущей позиции в промежуточную позицию Mw, расположенную впереди рассматриваемого транспортного средства V, и перемещается задним ходом, чтобы завершать маневр при парковке на месте PL для парковки. Такой маневр при парковке включает в себя один или более поворотов для парковки. Места для парковки, намеченные пути на которые на поверхности дороги не могут получаться вследствие наличия помех, таких как стена, не обнаруживаются в качестве мест для парковки, на которых возможна парковка. Например, намеченный путь (представленный посредством стрелок L пунктирных линий) на место PL8 для парковки не может получаться, поскольку стена W представляет собой помеху. Ввиду этого устройство 10 управления не обнаруживает место PL8 для парковки в качестве доступного места Me для парковки.
[0038] Хотя не ограничено конкретным образом, в позиции P1 рассматриваемого транспортного средства V, устройство 10 управления обнаруживает места для парковки, которые расположены перед исходной позицией рассматриваемого транспортного средства V и принадлежат диапазону предварительно определенного расстояния от рассматриваемого транспортного средства V, в качестве доступных мест для парковки. Исходная позиция рассматриваемого транспортного средства V может свободно задаваться. Хотя не ограничено конкретным образом, на фиг. 4A, места PL2-PL5 и PR2-PR5 для парковки принадлежат диапазону обнаружения доступных мест Me для парковки. Устройство 10 управления может быть сконфигурировано таким образом, чтобы не обнаруживать место PL1 для парковки в качестве доступного места Me для парковки, поскольку место PL1 для парковки будет расположено позади рассматриваемого транспортного средства V в пределах определенного времени. Диапазон обнаружения может быть расширен в соответствии с рабочими характеристиками камер 1a-1d и устройства 3 измерения дальности. Хотя не ограничено конкретным образом, устройство 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения представляет информацию парковки относительно этого диапазона обнаружения водителю. Следует понимать, что диапазон обнаружения не ограничен диапазоном мест PL2-PL5 и PR2-PR5 для парковки и также, например, может представлять собой диапазон мест PL1-PL8 и PR1-PR8 для парковки. Диапазон обнаружения может быть ограничен диапазоном, который включает в себя места PR1 для парковки в PR8 в правой стороне от рассматриваемого транспортного средства V и также может быть ограничен диапазоном, который включает в себя место PL1 для парковки в PL8 в левой стороне от рассматриваемого транспортного средства V.
[0039] Хотя не ограничено конкретным образом, устройство 10 управления согласно одному или более вариантов осуществления настоящего изобретения обнаруживает те из мест для парковки, которые являются незанятыми (другие транспортные средства не паркуются) и принадлежат предварительно определенному диапазону обнаружения, и для которых могут извлекаться намеченные пути L, в качестве доступных мест Me для парковки. Такая ситуация, что намеченные пути L могут извлекаться, означает такое условие, что траектории намеченных путей L могут подготавливаться посредством рендеринга в системе координат поверхности дороги без препятствия для помех (включающих в себя припаркованные транспортные средства).
[0040] В примере, проиллюстрированном на фиг. 4A, устройство 10 управления обнаруживает места PL2, PL4, PL5, PR2, PR3 и PR5 для парковки в качестве доступных мест Me для парковки в диапазоне обнаружения. Обнаруженные доступные места Me для парковки отображаются с помощью круга Me с пунктирной линией, который представляет собой метку доступности парковки.
[0041] Затем, процедура переходит к этапу 104, на котором устройство 10 управления обнаруживает рекомендованное место Mr для парковки в соответствии со следующим условием рекомендации по парковке. Ниже описывается "условие рекомендации по парковке".
[0042] 4. Условие рекомендации по парковке
"Условие рекомендации по парковке" согласно одному или более вариантов осуществления настоящего изобретения задается с точки зрения извлечения места для парковки, для которого затраты, требуемые для парковки (также называемые "связанными с парковкой затратами", здесь и в дальнейшем), являются низкими.
(1) Число поворотов для парковки составляет предварительно определенное число или меньше.
(2) Время, требуемое для парковки, составляет предварительно определенное время или меньше.
(3) Проезжаемое расстояние, требуемое для парковки, составляет предварительно определенное расстояние или меньше.
[0043] Устройство 10 управления обнаруживает рекомендованное место Mr для парковки в соответствии с состоянием движения рассматриваемого транспортного средства V из обнаруженного множества доступных мест для парковки. Устройство 10 управления сохраняет "условие рекомендации по парковке" для извлечения рекомендованного места Mr для парковки. "Условие рекомендации по парковке" задается с точки зрения извлечения места для парковки, для которого связанные с парковкой затраты являются низкими. "Условие рекомендации по парковке" предпочтительно задается с точек зрения числа поворотов для парковки, времени, требуемого для парковки, и проезжаемого расстояния, требуемого для парковки. На основе "условия рекомендации по парковке", устройство 10 управления извлекает рекомендованное место Mr для парковки, для которого связанные с парковкой затраты являются низкими, из числа доступных мест для парковки.
[0044] Ниже описывается способ обнаружения рекомендованного места Mr для парковки. Устройство 10 управления вычисляет связанные с парковкой затраты для парковки на каждом доступном месте для парковки. Связанные с парковкой затраты включают в себя затраты, которые связаны со временем, требуемым для парковки, числом операций, требуемых для парковки (к примеру, числом операций руления и числом операций нажатия педали тормоза/акселератора), и проезжаемым расстоянием, требуемым для парковки. Устройство 10 управления получает намеченный путь для парковки на каждом доступном месте Me для парковки и вычисляет время, требуемое для парковки, число операций и проезжаемое расстояние по намеченному пути. Устройство 10 управления вычисляет связанные с парковкой затраты на основе результатов вычисления каждого намеченного пути.
[0045] Устройство 10 управления вычисляет намеченный путь при парковке рассматриваемого транспортного средства V на каждом доступном месте Me для парковки. Намеченный путь представляет собой траекторию из позиции, в которой начинается процесс помощи при парковке (начальной позиции), в позицию, в которой рассматриваемое транспортное средство V прибывает в позицию завершения парковки на каждом доступном месте Me для парковки. Устройство 10 управления задает начальную позицию для каждого доступного места Me для парковки. Устройство 10 управления вычисляет намеченный путь из начальной позиции на каждое доступное место Me для парковки. Число намеченных путей для автоматизированного вождения не ограничено одним, и устройство 10 управления может вычислять множество намеченных путей в соответствии с окружающими ситуациями.
[0046] Затраты отличаются, к примеру, затраты, которые связаны с числом поворотов для парковки по намеченному пути, длиной намеченного пути, временем для прохождения намеченного пути (временем для парковки) и максимальным углом поворота при рулении, которые вычисляются для каждого доступного места Me для парковки. Чем меньше число поворотов для парковки, тем меньше время, требуемое для парковки (связанные с парковкой затраты являются небольшими). Чем короче длина намеченного пути, тем меньше время, требуемое для парковки (связанные с парковкой затраты являются небольшими). Чем меньше максимальный угол поворота при рулении, тем меньше время, требуемое для парковки (связанные с парковкой затраты являются небольшими). С другой стороны, чем больше число поворотов для парковки, тем больше время, требуемое для парковки (связанные с парковкой затраты являются большими). Чем больше длина намеченного пути, тем больше время, требуемое для парковки (связанные с парковкой затраты являются большими). Чем больше максимальный угол поворота при рулении, тем больше время, требуемое для парковки (связанные с парковкой затраты являются большими).
[0047] Ниже приводится описание, например, для примерного случая, в котором рассматриваемое транспортное средство V паркуется на доступном месте PL6 или PL7 для парковки, проиллюстрированном на фиг. 4A. Расстояние от места PL7 для парковки до стены W меньше расстояния от места PL6 для парковки до стены W. Число поворотов для парковки при парковке на месте PL7 для парковки превышает число поворотов для парковки при парковке на месте PL6 для парковки (связанные с парковкой затраты являются более высокими в первом случае). Время, требуемое для парковки на месте PL7 для парковки, превышает время, требуемое для парковки на месте PL6 для парковки (связанные с парковкой затраты являются более высокими в первом случае).
[0048] Устройство 10 управления вычисляет связанные с парковкой затраты (включающие в себя время для парковки) каждого доступного места для парковки и сохраняет связанные с парковкой затраты таким образом, что они ассоциированы с идентификатором каждого доступного места для парковки. Устройство 10 управления вычисляет связанные с парковкой затраты каждого доступного места Me для парковки с использованием одного или более из затрат в соответствии с числом поворотов для парковки по намеченному пути, связанных с парковкой затрат в соответствии с длиной намеченного пути, связанных с парковкой затрат в соответствии со временем для прохождения намеченного пути (временем для парковки) и связанных с парковкой затрат в соответствии с максимальным углом поворота при рулении. Каждые связанные с парковкой затраты могут вычисляться таким образом, что взвешивание задается в соответствии с типом.
[0049] После этого обнаруживается рекомендованное место для парковки в соответствии с расстоянием до точки взгляда.
Устройство 10 управления вычисляет расстояние до точки взгляда на основе скорости транспортного средства для рассматриваемого транспортного средства V. Расстояние до точки взгляда означает расстояние от позиции рассматриваемого транспортного средства V до позиции (точки взгляда), на которую смотрит водитель рассматриваемого транспортного средства V. Устройство 10 управления обнаруживает место для парковки, соответствующее позиции, на которую смотрит водитель, в качестве рекомендованного места для парковки.
[0050] В общем, чем выше скорость транспортного средства, тем дальше смотрит водитель, и чем ниже скорость транспортного средства, тем ближе смотрит водитель. С точки зрения рекомендации места для парковки в соответствии с точкой наблюдения водителя, устройство 10 управления задает большее расстояние до точки взгляда по мере того, как скорость транспортного средства для рассматриваемого транспортного средства V является более высокой, и задает меньшее расстояние до точки взгляда по мере того, как скорость транспортного средства является более низкой. Это обеспечивает возможность выполнения помощи при парковке на месте для парковки в соответствии с намерением водителя. Расстояние до точки взгляда не обязательно является линейным и также может задаваться вдоль кривой. Направление расстояния до точки взгляда может задаваться в соответствии с углом поворота при рулении рассматриваемого транспортного средства V.
[0051] Фиг. 5 является графиком, иллюстрирующим взаимосвязь между скоростью транспортного средства (V [км/с]) и расстоянием до точки взгляда (Y (м)). Сплошная линия представляет вышеуказанную взаимосвязь, когда скорость транспортного средства увеличивается, тогда как когда пунктирная линия представляет вышеуказанную взаимосвязь, когда скорость транспортного средства уменьшается. Как проиллюстрировано на фиг. 5, когда скорость транспортного средства составляет Va или ниже, расстояние до точки взгляда составляет Ya. Также, когда скорость транспортного средства составляет Va или выше и Vc или ниже, расстояние до точки взгляда составляет Ya. Когда скорость транспортного средства составляет Vc или выше и Vd или ниже, расстояние Y до точки взгляда увеличивается пропорционально скорости V транспортного средства. Когда скорость транспортного средства Vd или выше, расстояние до точки взгляда составляет Yb. С другой стороны, когда скорость транспортного средства понижается ниже Vd, расстояние до точки взгляда уменьшается вдоль пунктирной линии по фиг. 5. Хотя скорость транспортного средства понижается с Vd до Vb, расстояние до точки взгляда составляет Yb. В то время, когда скорость транспортного средства понижается с Vb до Va, расстояние Y до точки взгляда уменьшается пропорционально скорости V транспортного средства. Таким образом, взаимосвязь между скоростью V транспортного средства и расстоянием Y до точки взгляда имеет гистерезисную характеристику между направлением увеличения и направлением уменьшения скорости V транспортного средства.
[0052] ROM 12 устройства 10 управления сохраняет карту (например, взаимосвязь, проиллюстрированную на фиг. 5) между скоростью V транспортного средства и расстоянием Y до точки взгляда. Устройство 10 управления получает информацию относительно скорости V транспортного средства из датчика 60 скорости транспортного средства и обращается к карте, чтобы вычислять расстояние Y до точки взгляда в соответствии со скоростью V транспортного средства. Устройство 10 управления обнаруживает место для парковки около точки взгляда, которая отстоит от рассматриваемого транспортного средства V на расстояние Y до точки взгляда (т.е. место для парковки расположено в пределах предварительно определенного расстояния от точки взгляда).
[0053] Если скорость транспортного средства уменьшается, когда рекомендованное место для парковки представляется, расстояние до точки взгляда водителя уменьшается, и точки взгляда приближается к рассматриваемому транспортному средству V (перемещается к ближней стороне рассматриваемого транспортного средства V). Если в ответ на этот приближение точки взгляда, рекомендованное место для парковки должно изменяться из удаленного (например, места PL5 для парковки) на близлежащее (например, место PL4 для парковки), позиция рекомендованного места Mr для парковки будет перемещаться в направлении приближения к рассматриваемому транспортному средству V (в обратном направлении), даже если рассматриваемое транспортное средство V перемещается вперед на экране. Такое перемещение рекомендованного места Mr для парковки является неестественным и может смущать водителя. Как проиллюстрировано на фиг. 5, устройство 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения спроектировано таким образом, что расстояние до точки взгляда, когда скорость транспортного средства уменьшается, имеет гистерезисную характеристику. Такая гистерезисная характеристика обеспечивает возможность поддержания расстояния Yd до точки взгляда, даже когда скорость транспортного средства уменьшается. Это позволяет предотвращать неестественное отображение таким образом, что позиция рекомендованного места Mr для парковки перемещается назад в направлении движения рассматриваемого транспортного средства V и приближается к рассматриваемому транспортному средству V. В устройстве 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения, вышеописанное условие рекомендации по парковке может включать в себя расстояние до точки взгляда. Это обеспечивает рекомендацию места для парковки в соответствии с точкой наблюдения водителя.
[0054] Фиг. 4B иллюстрирует состояние, в котором рассматриваемое транспортное средство V перемещается вперед из позиции P1, проиллюстрированной на фиг. 4A, в позицию P2. Скорость рассматриваемого транспортного средства V в позиции P2 составляет V2 (<V1). Устройство 10 управления обращается к карте, чтобы вычислять расстояние до точки взгляда, соответствующее скорости V2 транспортного средства. Устройство 10 управления указывает точку G2, которая отстоит от позиции P2 на расстояние до точки взгляда, в качестве точки (G2) взгляда. Рассматриваемое транспортное средство V находится в состоянии выбора места для парковки с пониженной скоростью V2 транспортного средства (<V1). Расстояние между точкой G2 взгляда и рассматриваемым транспортным средством V меньше расстояния между точкой G1 взгляда, проиллюстрированной на фиг. 4A, и рассматриваемым транспортным средством V, поскольку скорость транспортного средства понижается.
[0055] В состоянии, проиллюстрированном на фиг. 4B, устройство 10 управления обнаруживает рекомендованное место для парковки из числа мест PL2, PL4, PL5, PR2, PR3 и PR5 для парковки около точки G2 взгляда. Устройство 10 управления обнаруживает рекомендованное место для парковки на основе связанных с парковкой затрат для каждого из мест PL2, PL4, PL5, PR2, PR3 и PR5 для парковки.
[0056] Устройство 10 управления назначает идентификационные номера для доступных мест Me для парковки около точки G2 взгляда. Устройство 10 управления вычисляет связанные с парковкой затраты для парковки на каждом доступном месте Me для парковки. Устройство 10 управления может считывать связанные с парковкой затраты для парковки, которые ранее вычислены. Связанные с парковкой затраты для парковки на каждом доступном месте Me для парковки отражают нагрузку, к примеру, время для парковки, требуемое для перемещения рассматриваемого транспортного средства V на место для парковки посредством автоматизированного вождения, число операций и расстояние перемещения. Связанные с парковкой затраты для парковки представляют собой индекс, отличающийся от уровня сложности, когда водитель завершает маневр при парковке. Устройство 10 управления вычисляет время, требуемое для парковки на каждом доступном месте Me для парковки. В примере по фиг. 4B, устройство 10 управления вычисляет время, требуемое для парковки на каждом из мест PL2, PL4, PL5, PR2, PR3 и PR5 для парковки, на которых возможна парковка, и сохраняет время, требуемое для парковки, таким образом, что оно ассоциировано с каждым идентификационным номером.
[0057] Устройство 10 управления сравнивает связанные с парковкой затраты для парковки на каждом доступном месте Me для парковки и предварительно определенное пороговое значение, которое предварительно задается. Предварительно определенное пороговое значение является верхним предельным пороговым значением связанных с парковкой затрат, которые включают в себя время, требуемое для парковки посредством автоматизированного вождения. Когда время (связанные с парковкой затраты), требуемое для парковки на доступном месте Me для парковки, меньше предварительно определенного порогового значения, устройство 10 управления обнаруживает доступное место Me для парковки в качестве рекомендованного места Mr для парковки. С другой стороны, когда время (связанные с парковкой затраты), требуемое для парковки на доступном месте Me для парковки, не меньше предварительно определенного порогового значения, устройство 10 управления не обнаруживает доступное место Me для парковки в качестве рекомендованного места Mr для парковки. Доступное место Me для парковки, для которого время, требуемое для парковки, является минимальным (связанные с парковкой затраты являются наименьшими), может обнаруживаться в качестве единственного рекомендованного места Mr для парковки.
[0058] Устройство 10 управления обнаруживает доступное место Me для парковки из доступных мест Me для парковки, для которых связанные с парковкой затраты являются наименьшими, в качестве рекомендованного места Mr для парковки. В примере, проиллюстрированном на фиг. 4B, место PL4 для парковки обнаруживается в качестве рекомендованного места Mr для парковки, поскольку связанные с парковкой затраты (время, требуемое для парковки) ниже предварительно определенного порогового значения, и точка взгляда является ближайшей (связанные с парковкой затраты являются наименьшими).
[0059] Устройство 10 управления выполняет процесс обнаружения для рекомендованного места Mr для парковки с предварительно определенным периодом. Как проиллюстрировано на фиг. 4C, также когда рассматриваемое транспортное средство V перемещается вперед в позицию P3 на скорости транспортного средства в V3, устройство 10 управления обнаруживает новое рекомендованное место Mr для парковки. Устройство 10 управления вычисляет новую точку взгляда G3 и связанные с парковкой затраты, требуемые для перемещения из текущей позиции на каждое доступное место Me для парковки, и обнаруживает место PL5 для парковки, для которого связанные с парковкой затраты являются наименьшими, и в котором возможна парковка, в качестве рекомендованного места Mr для парковки.
[0060] На этапе 105, устройство 10 управления отображает доступные места Me для парковки и рекомендованное место Mr для парковки на дисплее 21. Ниже подробнее поясняется Способ отображения доступных мест Me для парковки и рекомендованного места Mr для парковки согласно одному или более вариантов осуществления настоящего изобретения.
[0061] На этапе 106, выполняется определение в отношении того, вводится или нет целевое место Mo для парковки. Целевое место Mo для парковки означает место для парковки, на котором рассматриваемое транспортное средство V паркуется посредством автоматизированного вождения, т.е. целевую позицию при автоматизированном вождении. Целевое место Mo для парковки вводится водителем или пассажиром. Например, когда дисплей 21 представляет собой дисплей с сенсорной панелью, водитель или пассажир касается участка, представляющего требуемое место для парковки, чтобы за счет этого указывать целевое место Mo для парковки, и информация относительно целевого места Mo для парковки вводится в устройство 10 управления. Когда целевое место Mo для парковки вводится на этапе 106, последовательность операций управления переходит к этапу 107. С другой стороны, когда целевое место Mo для парковки не вводится, последовательность операций управления возвращается к этапу 104, и выполняется последовательность операций управления от этапа 104 до этапа 106.
[0062] Когда целевое место Mo для парковки вводится, это место для парковки задается в качестве целевого места Mo для парковки на этапе S107.
[0063] На этапе 108, устройство 10 управления вычисляет намеченный путь для перемещения рассматриваемого транспортного средства V на целевое место Mo для парковки.
[0064] Фиг. 4D является видом, иллюстрирующим окружение, в котором место PL5 для парковки указывается в качестве целевого места Mo для парковки. Устройство 10 управления вычисляет намеченный путь для парковки на основе позиционной взаимосвязи между позицией P4 рассматриваемого транспортного средства V, в которой начинается маневр при парковке (перемещение), и позицией целевого места Mo для парковки. Хотя не ограничено конкретным образом, устройство 10 управления вычисляет намеченный путь, который включает в себя кривую L1 и кривую L2. Кривая L1 лежит от позиции остановки рассматриваемого транспортного средства V, т.е. позиции, в которой начинается помощь при парковке, до промежуточной позиции Mw, в которой выполняется поворот для парковки. Кривая L2 лежит от промежуточной позиции Mw до целевого места Mo (PL5) для парковки.
[0065] Устройство 10 управления считывает намеченные пути, соответствующие выбранному режиму парковки, и вычисляет намеченный путь на основе позиционной взаимосвязи между позицией рассматриваемого транспортного средства V при начале процесса автоматизированной парковки и позицией целевого места Mo для парковки. Когда водитель нажимает вышеописанный переключатель автоблокировки в ходе работы в режиме автоматизированной парковки, устройство 10 управления управляет контроллером 30 транспортного средства, чтобы выполнять процесс перемещения рассматриваемого транспортного средства V на целевое место Mo для парковки для вычисленного намеченного пути.
[0066] Устройство 10 управления вычисляет намеченный путь, соответствующий каждой из парковки (A) под прямым углом, параллельной парковки (B) и парковки (C) под непрямым углом, проиллюстрированной на фиг. 6. В одном или более вариантов осуществления настоящего изобретения, намеченный путь описывается как вычисляемый, но настоящее изобретение не ограничено этим. В альтернативном варианте осуществления, намеченный путь, соответствующий типу места для парковки, сохраняется в запоминающем устройстве (ROM), и намеченный путь может считываться при парковке. Режим парковки (такой как парковка под прямым углом, параллельная парковка и парковка под непрямым углом) может выбираться водителем рассматриваемого транспортного средства V.
[0067] На этапе 109, устройство 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения выполняет процесс помощи при парковке или процесс автоматизированной парковки. Устройство 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения управляет работой приводной системы 40 через контроллер 30 транспортного средства таким образом, что рассматриваемое транспортное средство V перемещается вдоль намеченного пути.
[0068] Устройство 100 помощи при парковке вычисляет сигналы команд управления в приводную систему 40 рассматриваемого транспортного средства V, к примеру, в электромотор электронного усилителя руля, при возврате выходного значения датчика 50 угла поворота при рулении устройства рулевого управления таким образом, что траектория движения рассматриваемого транспортного средства V совпадает с вычисленным намеченным путем, и отправляет сигналы команд управления в приводную систему 40 или в контроллер 30 транспортного средства, который управляет приводной системой 40.
[0069] Устройство 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения включает в себя модуль управления помощью при парковке. Модуль управления помощью при парковке получает информацию диапазона переключения передач из модуля AT/CVT-управления, информацию скорости вращения колес из модуля ABS-управления, информацию угла поворота при рулении из модуля управления углом поворота при рулении, информацию частоты вращения двигателя из ECM и другую необходимую информацию. На ее основе, модуль управления помощью при парковке вычисляет и выводит информацию с инструкциями по автоматизированному рулению в модуль управления электронного усилителя руля, информацию с инструкциями, такую как предупреждение, в модуль управления измерительными приборами и т.д. Устройство 10 управления получает информационные элементы, которые получаются посредством датчика 50 угла поворота при рулении устройства рулевого управления рассматриваемого транспортного средства V и датчика 60 скорости транспортного средства и других датчиков транспортного средства через контроллер 30 транспортного средства.
[0070] Приводная система 40 согласно одному или более вариантов осуществления настоящего изобретения обеспечивает возможность рассматриваемому транспортному средству V перемещаться (двигаться) из текущей позиции на целевое место Mo для парковки посредством вождения на основе сигналов команд управления, полученных из устройства 100 помощи при парковке. Устройство рулевого управления согласно одному или более вариантов осуществления настоящего изобретения представляет собой приводной механизм, который перемещает рассматриваемое транспортное средство V в направлениях вправо и влево. электромотор электронного усилителя руля, включенный в приводную систему 40, приводит в действие механизм усилителя рулевого управления устройства рулевого управления на основе сигналов команд управления, полученных из устройства 100 помощи при парковке, чтобы управлять величиной руления, и помогает при операции при перемещении рассматриваемого транспортного средства V на целевое место Mo для парковки. Содержание помощи при парковке и процесс работы не ограничены конкретным образом, и процессы, известные на момент подачи этой заявки, могут надлежащим образом применяться.
[0071] Когда устройство 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения управляет рассматриваемым транспортным средством V таким образом, что оно перемещается на целевое место Mo для парковки по намеченному пути, вычисленному на основе позиции P4 рассматриваемого транспортного средства V и позиции целевого места Mo для парковки, акселератор и тормоз автоматически управляются на основе указанной управляющей скорости транспортного средства (заданной скорости транспортного средства), и работа устройства рулевого управления также автоматически управляется в соответствии со скоростью транспортного средства. Таким образом, во время помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения, операция руления и операция нажатия педали акселератора/тормоза автоматически выполняются.
Помимо этого, также можно выполнять процесс парковки посредством дистанционного управления, которое включает в себя передачу команды задания для целевого места Mo для парковки, команды начала процесса парковки, команды приостановки/отмены парковки и т.д. в рассматриваемое транспортное средство V без водителя от внешнего оператора.
[0072] Следует понимать, что водитель также может нажимать педаль акселератора/тормоза, и только работа устройства рулевого управления автоматически управляется. В этом случае, устройство 100 помощи при парковке управляет приводной системой 40 на основе заданной скорости транспортного средства, которая предварительно вычисляется таким образом, что рассматриваемое транспортное средство V придерживается намеченного пути для перемещения, и управляет устройством рулевого управления рассматриваемого транспортного средства V на основе заданного угла поворота при рулении, который также предварительно вычисляется. Кроме того, устройство 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения также является применимым к парковке вручную, при которой водитель выполняет операцию с акселератором, тормозом и механизмом рулевого управления.
[0073] Таким образом, устройство 100 помощи при парковке имеет автоматизированный режим движения, который не требует операции водителя, и режим операции вручную, который требует операции водителя. Автоматизированный режим движения включает в себя бортовой рабочий режим, в котором водитель находится на борту и управляет рассматриваемым транспортным средством V, и дистанционный рабочий режим, в котором оператор (водитель) удаленно управляет рассматриваемым транспортным средством V извне рассматриваемого транспортного средства V.
[0074] Ниже описывается способ представления информации помощи при парковке в устройстве 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения. В одном или более вариантов осуществления настоящего изобретения, информация помощи при парковке представляется с использованием устройства 20 вывода, которое включает в себя дисплей 21, и/или с использованием устройства 4 выдачи уведомлений, которое включает в себя динамик 41, лампу 42 и генератор 43 вибраций.
[0075] Во-первых, описывается способ отображения информации помощи при парковке с использованием дисплея 21.
Фиг. 7A и 7B иллюстрируют примеры отображения информации помощи при парковке.
В каждом из примеров отображения, проиллюстрированных на фиг. 7A и 7B, снятое сверху изображение 21a (вид сверху) отображается в левой стороне экрана дисплея 21, изображение 21b для мониторинга (нормальный вид) отображается в правой стороне экрана дисплея 21, и сообщения 21c отображаются выше изображения 21b для мониторинга. Снятое сверху изображение 21a включает в себя изображение (граничные линии мест для парковки), которое указывает выбираемые места для парковки. Центр снятого сверху изображения 21a отображается со значком рассматриваемого транспортного средства V, указывающим позицию рассматриваемого транспортного средства V. Изображение 21b для мониторинга может отображаться с различными изображениями, захваченными посредством камер 1a-1d в соответствии с рабочим состоянием рассматриваемого транспортного средства V. Изображение 21b для мониторинга, проиллюстрированное на фиг. 7A, отображается в качестве изображения, захваченного посредством камеры 1a, которая располагается на части решетки радиатора рассматриваемого транспортного средства V. Когда рассматриваемое транспортное средство V перемещается назад, изображение 21b для мониторинга может отображаться в качестве изображения, захваченного посредством камеры 1d, которая располагается около заднего бампера. В этом примере, снятое сверху изображение 21a и изображение 21b для мониторинга одновременно отображаются на дисплее 21, но только снятое сверху изображение 21a может отображаться на дисплее 21, или только изображение 21b для мониторинга может отображаться на дисплее 21.
[0076] Фиг. 7A и 7B иллюстрируют информацию помощи при парковке, отображаемую, когда выполняется поиск целевого места Mo для парковки. Рассматриваемое транспортное средство V перемещается вперед, и устройство 10 управления ожидает ввода информации выбора целевого места Mo для парковки. Фиг. 7A иллюстрирует окружение, в котором вышеописанное место PL4 для парковки, проиллюстрированное на фиг. 4B, обнаруживается в качестве рекомендованного места Mr для парковки, и фиг. 7B иллюстрирует окружение, в котором вышеописанное место PL5 для парковки, проиллюстрированное на фиг. 4C, обнаруживается в качестве рекомендованного места Mr для парковки. После того, как представляется информация помощи при парковке по фиг. 7A, представляется информация помощи при парковке по фиг. 7B.
[0077] Снятое сверху изображение 21a отображается с доступными местами Me для парковки и рекомендованным местом Mr для парковки. В окружении, в котором рассматриваемое транспортное средство V выполняет поиск доступного места Me для парковки при перемещении на автомобильной парковке, доступные места Me для парковки и рекомендованное место Mr для парковки изменяются по мере того, как рассматриваемое транспортное средство V перемещается. Устройство 100 помощи при парковке отображает доступные места Me для парковки и рекомендованное место Mr для парковки, которые последовательно обнаруживаются, на дисплее 21. Устройство 100 помощи при парковке отображает доступные места Me для парковки с метками доступности парковки в круглой форме и отображает рекомендованное место Mr для парковки с меткой рекомендации в прямоугольной форме. Примеры первого/второго места для парковки, которые должны отображаться в одном или более вариантов осуществления настоящего изобретения, включают в себя доступные места для парковки и рекомендованное место для парковки (здесь и в дальнейшем).
[0078] Как проиллюстрировано на фиг. 7A и 7B, когда рассматриваемое транспортное средство V перемещается, доступные места Me для парковки и рекомендованное место Mr для парковки последовательно изменяются по мере того, как рассматриваемое транспортное средство V перемещается. Когда доступное место Me для парковки или рекомендованное место Mr для парковки изменяется, устройство 100 помощи при парковке изменяет и отображает позицию доступного места для парковки или рекомендованного места для парковки.
[0079] Предполагается, что место для парковки, которое присутствует впереди рассматриваемого транспортного средства V, обнаруживается в качестве первого места для парковки (примеры первого места для парковки включают в себя доступные места для парковки и/или рекомендованное место для парковки, здесь и в дальнейшем), и его позиция отображается. После этого, если первое место для парковки становится позади рассматриваемого транспортного средства V по мере того, как рассматриваемое транспортное средство V перемещается, первое место для парковки больше не представляет собой место для парковки, которое является подходящим в качестве целевого места Mo для парковки. Чтобы парковаться на первом месте для парковки, расположенном позади рассматриваемого транспортного средства V, рассматриваемое транспортное средство V должно перемещаться назад. В этом случае, время, требуемое для процесса парковки посредством автоматизированного вождения, будет большим и увеличивает связанные с парковкой затраты.
[0080] Аналогично, если другое второе место для парковки (примеры второго места для парковки включают в себя доступные места для парковки и/или рекомендованное место для парковки, здесь и в дальнейшем) обнаруживается после того, как первое место для парковки обнаруживается, первое место для парковки, которое является ранее обнаруженным, больше не представляет собой место для парковки, которое является подходящим в качестве целевого места для парковки. Очевидно, что время, требуемое для процесса парковки, меньше (связанные с парковкой затраты являются более низкими) при парковке на втором месте для парковки, обнаруженном при текущем условии (в текущей позиции), чем при парковке на первом месте для парковки, обнаруженном при предыдущем условии (в предыдущей позиции). Другими словами, когда автоматизированная парковка выполняется, парковка на втором месте для парковки является более удобной, чем парковка на первом месте для парковки.
[0081] Когда скорость транспортного средства для рассматриваемого транспортного средства V является высокой, если доступное место Me для парковки или рекомендованное место Mr для парковки находится близко к рассматриваемому транспортному средству V, позиция отображения метки доступности парковки или метки рекомендации изменяется каждый раз, когда доступное место Me для парковки и рекомендованное место Mr для парковки изменяются. Если позиция отображения внезапно изменяется, время для пользователя, чтобы выбирать доступное место Me для парковки или рекомендованное место Mr для парковки, может быть недостаточным. Это также является истинным для доступных мест для парковки.
[0082] В одном или более вариантов осуществления настоящего изобретения, предложен способ отображения, который обеспечивает возможность пользователю легко выбирать место для парковки, когда рекомендованное место для парковки/доступные места для парковки переходят по мере того, как рассматриваемое транспортное средство V перемещается.
[0083] Ниже подробно описывается способ отображения информации помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 8A и 8B являются видами для описания примеров способа отображения согласно одному или более вариантов осуществления настоящего изобретения.
Со ссылкой на фиг. 8A, ниже описывается первый способ отображения согласно одному или более вариантов осуществления настоящего изобретения.
В первом способе отображения, осуществляемом в устройстве 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения, устройство 10 управления отображает первое место для парковки, которое удовлетворяет условию парковки, которое предварительно задается, в первой форме для отображения на дисплее 21 и отображает первое место для парковки во второй форме для отображения, отличающейся от первой формы для отображения, на дисплее 21, "когда оценивается или обнаруживается то, что первое место для парковки не будет удовлетворять условию парковки".
В другом аспекте первого способа отображения, устройство 10 управления отображает первое место для парковки, которое удовлетворяет условию парковки, которое предварительно задается, в первой форме для отображения на дисплее 21 и отображает первое место для парковки во второй форме для отображения, отличающейся от первой формы для отображения, на дисплее 21, "когда оценивается или обнаруживается то, что второе место для парковки, отличное от первого места для парковки, будет удовлетворять условию парковки".
[0084] В одном или более вариантов осуществления настоящего изобретения, форма для отображения переключается во временном интервале, когда оценивается или обнаруживается то, что первое место для парковки не будет удовлетворять условию парковки, или во временном интервале, когда оценивается или обнаруживается то, что второе место для парковки будет удовлетворять условию парковки.
[0085] "Временной интервал, когда оценивается или обнаруживается то, что первое место для парковки не будет удовлетворять условию парковки", означает временной интервал, когда первое место для парковки удовлетворяет условию парковки в настоящий момент, если определение выполняется на основе текущей позиционной взаимосвязи и т.п. между рассматриваемым транспортным средством V и первым местом для парковки, но оценивается или обнаруживается то, что первое место для парковки не будет удовлетворять условию парковки в момент времени после предварительно определенного времени от текущего момента времени с учетом направления перемещения и скорости перемещения рассматриваемого транспортного средства V. Таким образом, "временной интервал, когда оценивается или обнаруживается то, что первое место для парковки не будет удовлетворять условию парковки", представляет собой временной интервал раньше временного интервала, когда первое место для парковки фактически не удовлетворяет условию парковки.
[0086] "Временной интервал, когда оценивается или обнаруживается то, что второе место для парковки будет удовлетворять условию парковки", означает временной интервал, когда второе место для парковки не удовлетворяет условию парковки в настоящий момент, если определение выполняется на основе текущей позиционной взаимосвязи и т.п. между рассматриваемым транспортным средством V и вторым местом для парковки, но оценивается или обнаруживается то, что второе место для парковки будет удовлетворять условию парковки в момент времени после предварительно определенного времени от текущего момента времени с учетом направления перемещения и скорости перемещения рассматриваемого транспортного средства V. Таким образом, "временной интервал, когда оценивается или обнаруживается то, что второе место для парковки будет удовлетворять условию парковки", представляет собой временной интервал позже временного интервала, когда второе место для парковки фактически удовлетворяет условию парковки.
[0087] В частности, после того, как дисплей 21 отображает первое место для парковки, удовлетворяющее предварительно заданному условию парковки, в первой форме для отображения на дисплее 21, когда оценивается или обнаруживается то, что первое место для парковки не будет удовлетворять условию парковки, устройство 10 управления согласно одному или более вариантов осуществления настоящего изобретения управляет дисплеем 21 таким образом, чтобы отображать первое место для парковки во второй форме для отображения, отличающейся от первой формы для отображения.
Помимо этого или альтернативно, после того, как дисплей 21 отображает первое место для парковки, удовлетворяющее предварительно заданному условию парковки, в первой форме для отображения на дисплее 21, когда оценивается или обнаруживается то, что второе место для парковки, отличное от первого места для парковки, будет удовлетворять условию парковки, устройство 10 управления согласно одному или более вариантов осуществления настоящего изобретения управляет дисплеем 21 таким образом, чтобы отображать первое место для парковки во второй форме для отображения, отличающейся от первой формы для отображения.
[0088] В одном или более вариантов осуществления настоящего изобретения, в качестве замены для "условия парковки" для оценки или обнаружения того, что место для парковки, удовлетворяющее условию парковки, не будет удовлетворять условию парковки, "условие оценки парковки", отличающееся от "условия парковки", может задаваться. "Условие оценки парковки" задается для каждого из условия возможности парковки для обнаружения доступных мест для парковки и условия рекомендации по парковке для обнаружения рекомендованного места для парковки. Когда первое место для парковки удовлетворяет "условию оценки парковки", устройство 10 управления оценивает или обнаруживает то, что первое место для парковки не будет удовлетворять "условию парковки". Например, когда "условие парковки" включает в себя такое условие, что место для парковки расположено впереди рассматриваемого транспортного средства V, "условие оценки парковки" может представлять собой такое условие, что расстояние между рассматриваемым транспортным средством V и местом для парковки меньше предварительно определенного значения. Сразу после того, как расстояние между рассматриваемым транспортным средством V и местом для парковки становится меньше предварительно определенного значения, место для парковки будет присутствовать позади рассматриваемого транспортного средства V, а не впереди рассматриваемого транспортного средства V. Устройство 10 управления определяет временной интервал при удовлетворении "условию оценки парковки" в качестве временного интервала, когда не будет удовлетворено "условие парковки". Эта точка зрения может применяться к случаю изменения с первой формы для отображения на вторую форму для отображения и к случаю изменения с третьей формы для отображения на четвертую форму для отображения.
[0089] Вертикальная ось, проиллюстрированная на фиг. 8A, представляет значение количественной оценки (значение оценки) для отображения в первой форме для отображения и второй форме для отображения. Значение оценки является значением для оценки того, является или нет отображение четким. Значение оценки задается таким образом, что отображение становится более четким по мере того, как значение оценки приближается к 1, при этом отображение становится более нечетким по мере того, как значение оценки приближается к 0. Отображение становится более заметным/выделенным по мере того, как значение оценки приближается к 1, в то время как отображение становится более незаметным/невыделенным по мере того, как значение оценки приближается к 0. Значение оценки представляет относительную взаимосвязь степени выделения между отображением в первой форме для отображения и отображением во второй форме для отображения. В частности, когда значение оценки является яркостью схематического изображения, схематическое изображение отображается с более высокой яркостью по мере того, как значение оценки приближается к 1, в то время как схематическое изображение отображается с более низкой яркостью по мере того, как значение оценки приближается к 0. Когда значение оценки является цветовой фазой схематического изображения, схематическое изображение отображается в более заметном цвете (обеспечивающем эффект приближения цвете) по мере того, как значение оценки приближается к 1, в то время как схематическое изображение отображается в более незаметном цвете (обеспечивающем эффект отдаления цвете) по мере того, как значение оценки приближается к 0. Когда значение оценки является толщиной линий схематического изображения, толщина линий является большей по мере того, как значение оценки приближается к 1, в то время как ширина линии является меньшей по мере того, как значение оценки приближается к 0. Когда значение оценки является формой линий схематического изображения, линии находятся в более выделенной форме (сдвоенные линии, сплошные линии, жирные линии) по мере того, как значение оценки приближается к 1, в то время как линии находятся в более невыделенной форме (одиночные линии, пунктирные линии, тонкие линии) по мере того, как значение оценки приближается к 0. Выделение/отсутствие выделения формы для отображения представляет собой относительную оценку.
[0090] Как проиллюстрировано на фиг. 8A, первое место для парковки отображается в первой форме для отображения во время T1, когда первое место для парковки (доступное место для парковки, рекомендованное место для парковки) сначала обнаруживается. Предпочтительно четко указывать первое место для парковки, которое обнаруживается сначала, во временном интервале обнаружения.
[0091] Когда рассматриваемое транспортное средство V перемещается, позиционная взаимосвязь между рассматриваемым транспортным средством V и первым местом для парковки варьируется, и ввиду этого может возникать случай, в котором первое место для парковки не будет удовлетворять условию парковки. В таком случае, первое место для парковки, которое заранее указывается, не будет представлять собой доступное место для парковки/рекомендованное место для парковки в некоторых случаях.
[0092] Например, когда условие парковки включает в себя такое условие, что "первое место для парковки расположено на стороне направления движения рассматриваемого транспортного средства V", может оцениваться то, что рассматриваемое транспортное средство V будет проезжать через первое место для парковки, из изменения позиционной взаимосвязи между рассматриваемым транспортным средством V и первым местом для парковки. В это время, устройство 10 управления оценивает то, что первое место для парковки не будет удовлетворять условию парковки (удовлетворяет условию оценки парковки). Устройство 10 управления может вычислять временной интервал, в который рассматриваемое транспортное средство V проезжает мимо рядом с первым местом для парковки из скорости транспортного средства для рассматриваемого транспортного средства V и текущего расстояния до первого места для парковки. На основе позиции и скорости транспортного средства для рассматриваемого транспортного средства V и позиционной взаимосвязи с первым местом для парковки, устройство 10 управления может вычислять временной интервал удовлетворения "условию парковки" и определять состояние во временном интервале перед предварительно определенным временем от этого времени в качестве "состояния, в котором оценивается то, что не будет удовлетворяться условие парковки". "Оценка того, что условие парковки не будет удовлетворяться" означает то, что выполняется определение в отношении того, что условие парковки удовлетворяется в настоящий момент, но не будет удовлетворяться в будущем, из позиции и скорости транспортного средства для рассматриваемого транспортного средства V и позиционной взаимосвязи с первым местом для парковки.
[0093] В одном или более вариантов осуществления настоящего изобретения, описан пример, в котором устройство 10 управления сравнивает оцененную ситуацию первого места для парковки и условие парковки, чтобы оценивать то, удовлетворяет или нет первое место для парковки условию парковки, но настоящее изобретение не ограничено этим. Таким образом, устройство 10 управления может сравнивать текущую ситуацию первого места для парковки и "условие оценки парковки", которое отличается от "условия парковки", чтобы определять то, будет удовлетворять первое место для парковки "условию парковки" в будущем или не будет удовлетворять условию парковки. Например, когда условие парковки заключается в том, что "первое место для парковки расположено на стороне направления движения рассматриваемого транспортного средства V", первое место для парковки может сдвигаться (состояние может изменяться) в позицию в направлении, в котором первое место для парковки не удовлетворяет условию парковки по мере того, как рассматриваемое транспортное средство движется. Чтобы количественно оценивать/оценивать будущую позицию (состояние) первого места для парковки, устройство 10 управления может задавать "условие оценки парковки", которое удовлетворяется с меньшей вероятностью, чем "условие парковки", и оценивать то, что вероятность того, что первое место для парковки будет удовлетворять "условию парковки", является высокой, когда текущее первое место для парковки удовлетворяет "условию оценки парковки". В зависимости от содержания "условия парковки" устройство 10 управления может задавать "условие оценки парковки", которое удовлетворяется с большей вероятностью, чем "условие парковки", и оценивать то, что вероятность того, что первое место для парковки будет удовлетворять "условию парковки", является высокой, когда текущее первое место для парковки удовлетворяет "условию оценки парковки".
[0094] Когда оценивается то, что первое место для парковки не будет удовлетворять условию парковки, устройство 10 управления изменяет форму для отображения первого места для парковки с первой формы для отображения на вторую форму для отображения во временном интервале TA1 перед предварительно определенным временем Δta1 от временного интервала TA2, в который первое место для парковки не будет удовлетворять условию парковки. Посредством переключения формы для отображения с первой формы для отображения на вторую форму для отображения, водитель может уведомляться в отношении того, что выбор первого места для парковки не будет разрешаться (условие парковки не будет удовлетворяться в будущем).
[0095] Устройство 10 управления может отображать первое место для парковки во второй форме для отображения и затем задавать временной интервал окончания отображения первого места для парковки во временном интервале перед временным интервалом T2, в который второе место для парковки отображается в первой форме для отображения. В варианте осуществления, как проиллюстрировано посредством пунктирной линии на фиг. 8A, устройство 10 управления может задавать временной интервал окончания отображения первого места для парковки после временного интервала T2, чтобы продлевать время для отображения первого места для парковки. Длительное время для отображения первого места для парковки обеспечивает возможность водителю (или пассажиру) выбирать первое место для парковки во времени, и водитель может легко выбирать первое место для парковки.
[0096] Аналогично, когда рассматриваемое транспортное средство V перемещается, позиционная взаимосвязь между рассматриваемым транспортным средством V и первым местом для парковки варьируется, и ввиду этого второе место для парковки, отличное от первого места для парковки, которое присутствует впереди рассматриваемого транспортного средства V, может удовлетворять условию парковки. В этом случае, новое второе место для парковки, отличающееся от первого места для парковки, может представлять собой доступное место для парковки/рекомендованное место для парковки.
[0097] Например, когда условие парковки включает в себя такое условие, что "второе место для парковки расположено в пределах предварительно определенного расстояния от рассматриваемого транспортного средства V", может оцениваться то, что рассматриваемое транспортное средство V приблизится ко второму месту для парковки таким образом, что оно будет находится в пределах предварительно определенного расстояния. В это время, устройство 10 управления оценивает то, что второе место для парковки будет удовлетворять условию парковки. Устройство 10 управления может вычислять временной интервал, в который рассматриваемое транспортное средство V приближается ко второму месту для парковки, из скорости транспортного средства для рассматриваемого транспортного средства V и текущего расстояния до второго места для парковки. На основе позиции и скорости транспортного средства для рассматриваемого транспортного средства V и позиционной взаимосвязи со вторым местом для парковки, устройство 10 управления может вычислять временной интервал удовлетворения "условию парковки" и определять состояние во временном интервале перед предварительно определенным временем от этого времени в качестве "состояния, в котором оценивается то, что будет удовлетворяться условие парковки". "Оценка того, что условие парковки будет удовлетворяться" означает то, что выполняется определение в отношении того, что условие парковки не удовлетворяется в настоящий момент, но будет удовлетворяться в будущем, из позиции и скорости транспортного средства для рассматриваемого транспортного средства V и позиционной взаимосвязи с первым местом для парковки. В варианте осуществления, когда "условие оценки парковки", полученное посредством понижения порогового значения "условия парковки" (изменения порогового значения на значение, которое может легко удовлетворяться), удовлетворяется, устройство 10 управления может оценивать то, что второе место для парковки будет удовлетворять условию парковки.
[0098] В одном или более вариантов осуществления настоящего изобретения, описан пример, в котором устройство 10 управления сравнивает оцененную ситуацию второго места для парковки и условие парковки, чтобы оценивать то, удовлетворяет или нет второе место для парковки условию парковки, но настоящее изобретение не ограничено этим. Таким образом, устройство 10 управления может сравнивать текущую ситуацию второго места для парковки и "условие оценки парковки", которое отличается от "условия парковки", чтобы определять то, будет ли удовлетворять первое место для парковки "условию парковки" в будущем или не будет удовлетворять условию парковки. Например, когда условие парковки заключается в том, что "второе место для парковки расположено в пределах предварительно определенного расстояния от рассматриваемого транспортного средства V", второе место для парковки может сдвигаться (состояние может изменяться) в позицию, в которой второе место для парковки удовлетворяет условию парковки по мере того, как рассматриваемое транспортное средство движется. Чтобы количественно оценивать/оценивать будущую позицию (состояние) второго места для парковки, устройство 10 управления может задавать "условие оценки парковки", которое удовлетворяется с большей вероятностью, чем "условие парковки", и оценивать то, что вероятность того, что второе место для парковки будет удовлетворять "условию парковки", является высокой, когда текущее второе место для парковки удовлетворяет "условию оценки парковки". Следует понимать, что в зависимости от содержания "условия парковки", устройство 10 управления может задавать "условие оценки парковки", которое удовлетворяется с меньшей вероятностью, чем "условие парковки", и оценивать то, что вероятность того, что второе место для парковки будет удовлетворять "условию парковки", является высокой, когда текущее второе место для парковки удовлетворяет "условию оценки парковки".
[0099] Когда оценивается то, что второе место для парковки будет удовлетворять условию парковки, устройство 10 управления изменяет форму для отображения первого места для парковки с первой формы для отображения на вторую форму для отображения во временном интервале TA1' перед предварительно определенным временем Δta1' от временного интервала T2, в который второе место для парковки будет удовлетворять условию парковки. Посредством переключения формы для отображения с первой формы для отображения на вторую форму для отображения, водитель может уведомляться в отношении того, что второе место для парковки, которое является новым доступным, будет выбираться. Водитель также может уведомляться в отношении того, что вероятность того, что первое место для парковки, которое ранее отображается как удовлетворяющее условию парковки, не будет удовлетворять условию парковки, является высокой (выбор первого места для парковки не будет разрешаться).
Устройство 10 управления может задавать временной интервал начала отображения второго места для парковки в третьей форме для отображения одновременно с тем, как или после временного интервала окончания отображения первого места для парковки, которое ранее представлено. В варианте осуществления, как проиллюстрировано посредством пунктирной линии на фиг. 8A, устройство 10 управления может задавать временной интервал начала отображения второго места для парковки перед временным интервалом окончания отображения первого места для парковки, чтобы продлевать время для отображения второго места для парковки. Длительное время для отображения второго места для парковки обеспечивает возможность водителю (или пассажиру) выбирать второе место для парковки во времени, и водитель может легко выбирать второе место для парковки.
[0100] Временной интервал TA1 и временной интервал TA1' могут представлять собой идентичный временной интервал либо также могут представлять собой различный временной интервал. Во временном интервале TA1, отображение переключается на основе временного интервала TA2, в который не будет удовлетворяться первое место для парковки (т.е. это состояние оценивается). Во временном интервале TA1', отображение переключается на основе временного интервала T2, в который будет удовлетворяться второе место для парковки (т.е. это состояние оценивается). Предварительно определенное время Δta1, задающее временной интервал TA1, и предварительно определенное время Δta1', задающее временной интервал TA1', могут задаваться как идентичная длина либо также могут задаваться как различные длины.
[0101] Хотя не ограничено конкретным образом, устройство 10 управления отображает изображение, указывающее первое место для парковки, во второй форме для отображения с относительно более низкой степенью выделения по сравнению с первой формой для отображения. Таким образом, первое место для парковки, которое оценивается как не удовлетворяющее условию парковки, может отображаться во второй форме для отображения, которая является относительно незаметной по сравнению с первой формой для отображения, чтобы за счет этого уведомлять водителя в отношении того, что первое место для парковки больше не будет представлять собой самое подходящее место для парковки.
[0102] Хотя не ограничено конкретным образом, устройство 10 управления может изменять вторую форму для отображения таким образом, что изображение, указывающее первое место для парковки, отображается с постепенным размытием (с затемнением). В частности, как проиллюстрировано на фиг. 8A, после того, как форма для отображения изменяется с первой формы для отображения на вторую форму для отображения во временном интервале TA1, вторая форма для отображения может дополнительно изменяться на форму незаметного отображения (форма для отображения может изменяться таким образом, что значение количественной оценки (значение оценки) для отображения асимптотически приближается к 0). Таким образом, первое место для парковки может отображаться во второй форме для отображения, которая постепенно изменяется таким образом, что она отображается незаметным способом, чтобы за счет этого уведомлять водителя в отношении того, что первое место для парковки бдует представлять собой место для парковки, которое не может выбираться во времени.
[0103] Как проиллюстрировано на фиг. 8A, отображение первого места для парковки во второй форме для отображения может прекращаться во временном интервале TA2 перед временным интервалом T2, в который обнаруживается следующее второе место для парковки, либо также может прекращаться во временном интервале TA3 после временного интервала T2, в который обнаруживается следующее второе место для парковки. Для ссылки, на фиг. 8A, форма для отображения второго места для парковки примерно иллюстрируется посредством пунктирной линии H2, но настоящее изобретение не ограничено этим.
[0104] В устройстве 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения, устройство 10 управления определяет первое время Δta1, Δta1' от временного интервала TA1, в который первое место для парковки отображается во второй форме для отображения, до временного интервала TA2, в который первое место для парковки не отображается, в соответствии со скоростью рассматриваемого транспортного средства V. Устройство 10 управления определяет первое время Δta1, Δta1' от временного интервала, в который отображение переключается с первой формы для отображения на вторую форму для отображения, т.е. от временного интервала TA1 уведомления в отношении вероятности того, что выбор первого места для парковки не будет разрешаться, до временного интервала TA2, в который первое место для парковки не отображается, в соответствии со скоростью рассматриваемого транспортного средства V. Устройство 10 управления задает первое время Δta1, Δta1' большим по мере того, как скорость рассматриваемого транспортного средства V увеличивается. В варианте осуществления, устройство 10 управления может задавать отношение первого времени Δta1, Δta1' к первому времени Δta2 от временного интервала, в который первое место для парковки отображается в первой форме для отображения, до временного интервала, в который первое место для парковки не отображается, со ссылкой на первое время Δta2. Это позволяет уведомлять водителя и/или пассажиров (оператора или человека, занимающего место в транспортном средстве) в отношении вероятности того, что выбор первого места для парковки не будет разрешаться. Ввиду этого, водитель и пассажир могут легко воспринимать то, что первое место для парковки не будет удовлетворять условию парковки.
[0105] В устройстве 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения, когда первое место для парковки, которое ранее представлено, и второе место для парковки, которое затем представлено, являются смежными друг с другом, устройство 10 управления продлевает вышеуказанное первое время Δta1, Δta1' для задания по сравнению со случаем, в котором первое место для парковки и второе место для парковки не являются смежными друг с другом.
Когда первое место для парковки и второе место для парковки являются смежными друг с другом, имеется очень высокая вероятность того, что переход места для парковки (доступного места для парковки/рекомендованного места для парковки) возникает за короткое время. В таком случае, предпочтительно уведомлять водителя заблаговременно в отношении того, что первое место для парковки не будет доступным. Когда первое место для парковки и второе место для парковки являются смежными друг с другом, первое время Δta1, Δta1' продлевается по сравнению с тем, когда они не являются смежными. Чтобы продлевать первое время Δta1, Δta1', временной интервал TA1, в который отображение изменяется с первой формы для отображения на вторую форму для отображения, может становиться более ранним. Это позволяет удлинять время, в течение которого может выбираться первое место для парковки, даже когда первое место для парковки и второе место для парковки являются смежными друг с другом, и водитель может обеспечивать время для выбора первого места для парковки.
[0106] В качестве примера управления, когда период времени между временным интервалом, в который первое место для парковки удовлетворяет условию парковки, и временным интервалом, в который второе место для парковки удовлетворяет условию парковки, не превышает предварительно определенный период времени, устройство 10 управления согласно одному или более вариантов осуществления настоящего изобретения запрещает переключение формы для отображения первого места для парковки с первой формы для отображения на вторую форму для отображения, даже когда оценивается то, что второе место для парковки, отличное от первого места для парковки, будет удовлетворять условию парковки. В этом случае, устройство 10 управления продолжает отображать первое место для парковки в первой форме для отображения. Таким образом, процесс отображения для первого места для парковки в первой форме для отображения продолжается. После этого, когда устройство 10 управления обнаруживает второе место для парковки, и далее оценивает то, что третье место для парковки, отличное от первого и второго мест для парковки, будет удовлетворять условию парковки, устройство 10 управления переключает первое место для парковки на вторую форму для отображения.
[0107] Когда первое место для парковки и второе место для парковки находятся близко друг к другу, второе место для парковки обнаруживается сразу после обнаружения первого места для парковки, и первая форма для отображения для отображения первого места для парковки ввиду этого может быстро изменяться. Так же, когда скорость транспортного средства является высокой, второе место для парковки обнаруживается сразу после обнаружения первого места для парковки, и первая форма для отображения для отображения первого места для парковки ввиду этого может быстро изменяться. Таким образом, когда место для парковки, на котором возможна парковка, присутствует в пределах короткого расстояния, либо когда скорость транспортного средства для рассматриваемого транспортного средства V является высокой, период переключения формы для отображения сокращается, и для водителя или пассажиров может быть затруднительным легко выбирать место для парковки. В этом процессе, когда период времени между временным интервалом, в который первое место для парковки удовлетворяет условию парковки, и временным интервалом, в который второе место для парковки удовлетворяет условию парковки, не превышает предварительно определенный период времени, этот случай количественно оценивается/оценивается в качестве случая, в котором доступные места для парковки находятся близко друг к другу, или случая, в котором скорость транспортного средства для рассматриваемого транспортного средства V является высокой, и изменение формы для отображения первого места для парковки сразу запрещается, с тем чтобы продолжать отображение в первой форме для отображения. Это обеспечивает возможность водителю или пассажирам легко выбирать первое место для парковки, поскольку продлевается время, в течение которого первое место для парковки отображается в идентичной форме для отображения (первой форме для отображения).
[0108] Ниже подробно описывается второй способ отображения согласно одному или более вариантов осуществления настоящего изобретения со ссылкой на фиг. 8B.
Во втором способе отображения согласно одному или более вариантов осуществления настоящего изобретения, когда устройство 10 управления отображает первое место для парковки в первой форме для отображения и после этого оценивает то, что второе место для парковки будет удовлетворять условию парковки, на стадии оценки, устройство 10 управления отображает второе место для парковки в третьей форме для отображения на дисплее 21. После этого, устройство 10 управления отображает второе место для парковки в четвертой форме для отображения на дисплее 21. Временной интервал, в который второе место для парковки отображается в четвертой форме для отображения на дисплее 21, предпочтительно представляет собой временной интервал, в который второе место для парковки фактически удовлетворяет условию парковки.
[0109] Таким образом, во временном интервале, в который оценивается то, что второе место для парковки будет удовлетворять условию парковки, второе место для парковки может предварительно отображаться, чтобы за счет этого уведомлять водителя в отношении того, что выбор следующего места для парковки будет разрешаться. Кроме того, форма для отображения изменяется с третьей формы для отображения на четвертую форму для отображения во временном интервале, в который второе место для парковки фактически удовлетворяет условию парковки, и ввиду этого водитель может уведомляться в отношении того, что предварительно уведомленное состояние изменяется на состояние, в котором выбор фактически разрешается.
[0110] Значение количественной оценки/оценки схемы, проиллюстрированное на фиг. 8B, является общим со значением количественной оценки/оценки схемы, проиллюстрированной на фиг. 8A. Как проиллюстрировано на фиг. 8B, устройство 10 управления определяет то, что второе место для парковки фактически удовлетворяет условию парковки во временном интервале T2 после временного интервала T1, в который обнаруживается первое место для парковки (доступное место для парковки, рекомендованное место для парковки). Перед временным интервалом T2, устройство 10 управления определяет то, оценивается или нет то, что второе место для парковки будет удовлетворять условию парковки.
[0111] Когда рассматриваемое транспортное средство V перемещается, позиционная взаимосвязь между рассматриваемым транспортным средством V и вторым местом для парковки варьируется, и ввиду этого второе место для парковки, отличное от первого места для парковки, может заново удовлетворять условию парковки. Например, когда условие парковки включает в себя такое условие, что "место для парковки расположено в пределах предварительно определенного расстояния от рассматриваемого транспортного средства V", может оцениваться то, что расстояние между рассматриваемым транспортным средством V и вторым местом для парковки будет находиться в пределах предварительно определенного расстояния, из такого события, что рассматриваемое транспортное средство V приближается ко второму месту для парковки. В это время, устройство 10 управления может оценивать то, что второе место для парковки будет удовлетворять условию парковки. Устройство 10 управления может вычислять временной интервал, в который расстояние между рассматриваемым транспортным средством V и вторым местом для парковки будет находиться в пределах предварительно определенного расстояния, на основе скорости транспортного средства для рассматриваемого транспортного средства V и текущего расстояния до второго места для парковки.
[0112] В этом примере, временной интервал TB1 перед временным интервалом T2 представляет собой временной интервал, в который оценивается то, что второе место для парковки будет удовлетворять условию парковки. Временной интервал, в который оценивается то, что второе место для парковки будет удовлетворять условию парковки, означает временной интервал, в который вероятность того, что второе место для парковки будет удовлетворять условию парковки, определяется из скорости транспортного средства для рассматриваемого транспортного средства V и взаимосвязи между текущей позицией рассматриваемого транспортного средства V и вторым местом для парковки, и выполняется определение в отношении того, что вероятность удовлетворения условию парковки не ниже предварительно определенного значения. Например, при условии, что условие парковки представляет собой верхний предел расстояния (такое условие, что расстояние не превышает Q, представляет собой условие парковки), когда значение меньше предварительно определенного многозначного числа, которое задается посредством условия парковки (расстояние составляет Q x 1,2 или меньше), оценивается то, что второе место для парковки будет удовлетворять условию парковки. Временной интервал, в который оценивается то, что второе место для парковки будет удовлетворять условию парковки, может получаться в качестве временного интервала перед временным интервалом T2, в который второе место для парковки фактически удовлетворяет условию парковки.
[0113] Когда оценивается то, что второе место для парковки будет удовлетворять условию парковки, устройство 10 управления изменяет форму для отображения первого места для парковки с третьей формы для отображения на четвертую форму для отображения во временном интервале TB1 перед предварительно определенным временем Δtb1 от временного интервала T2, в который второе место для парковки будет удовлетворять условию парковки. Посредством переключения формы для отображения с третьей формы для отображения на четвертую форму для отображения, водитель может уведомляться в отношении того, что выбор второго места для парковки будет разрешаться.
[0114] Хотя не ограничено конкретным образом, во временном интервале TB1, устройство 10 управления отображает второе место для парковки в третьей форме для отображения с относительно низкой степенью выделения и затем отображает второе место для парковки в четвертой форме для отображения с относительно высокой степенью выделения. Через эту операцию, второе место для парковки, которое оценивается как удовлетворяющее условию парковки, может отображаться в третьей форме для отображения, которая является относительно незаметной, чтобы за счет этого уведомлять водителя в отношении вероятности того, что второе место для парковки может выбираться в качестве места для парковки. После этого, во временном интервале T2, в который условие парковки фактически удовлетворяется, второе место для парковки может отображаться в четвертой форме для отображения, которая является относительно заметной, чтобы за счет этого уведомлять водителя в отношении того, что второе место для парковки может фактически выбираться в качестве места для парковки.
[0115] Хотя не ограничено конкретным образом, устройство 10 управления может изменять третью форму для отображения таким образом, что изображение, указывающее второе место для парковки, отображается с постепенным повышением четкости (с выходом из затемнения). В частности, как проиллюстрировано на фиг. 8B, после того, как второе место для парковки отображается в третьей форме для отображения, до временного интервала TB1, третья форма для отображения может изменяться на форму для выделенного отображения (форма для отображения может изменяться таким образом, что значение количественной оценки/оценки для отображения асимптотически приближается к 1). Таким образом, второе место для парковки может отображаться в третьей форме для отображения, которая постепенно изменяется таким образом, что она отображается с помощью выделения, чтобы за счет этого уведомлять водителя в отношении того, что первое место для парковки будет представлять собой место для парковки, которое может выбираться в будущем.
[0116] Как проиллюстрировано на фиг. 8B, отображение второго места для парковки в третьей форме для отображения может прекращаться во временном интервале TB2 перед временным интервалом T3, в который обнаруживается следующее третье место для парковки, либо также может прекращаться во временном интервале после временного интервала T3, в который обнаруживается следующее третье место для парковки. Для ссылки, на фиг. 8B, форма для отображения третьего места для парковки примерно иллюстрируется посредством пунктирной линии H3, но настоящее изобретение не ограничено этим.
[0117] В устройстве 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения, устройство 10 управления определяет второе время Δtb1 от временного интервала TB1, в который второе место для парковки отображается в третьей форме для отображения, до временного интервала T2, в который второе место для парковки отображается в четвертой форме для отображения, в соответствии со скоростью рассматриваемого транспортного средства V. Устройство 10 управления определяет второе время Δtb1 от временного интервала, в который отображение переключается с третьей формы для отображения на четвертую форму для отображения, т.е. от временного интервала TB1, уведомляющего в отношении того, что выбор второго места для парковки будет разрешаться, до временного интервала T2, в который второе место для парковки может фактически выбираться, в соответствии со скоростью рассматриваемого транспортного средства V. Устройство 10 управления задает второе время Δtb1 большим по мере того, как скорость рассматриваемого транспортного средства V увеличивается. Это предоставляет возможность более раннего уведомления в отношении того, что второе место для парковки может выбираться по мере того, как скорость рассматриваемого транспортного средства V является более высокой. Водитель может обеспечивать достаточное время для предположения второго места для парковки. В варианте осуществления, устройство 10 управления может задавать отношение второго времени Δtb1 ко времени Δtb2 от временного интервала, в который второе место для парковки отображается в четвертой форме для отображения, до временного интервала, в который второе место для парковки не отображается, со ссылкой на время Δtb2. Это обеспечивает возможность людям, занимающим место в транспортном средстве (включающим в себя водителя) обеспечивать достаточное время для предположения второго места для парковки.
[0118] В устройстве 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения, устройство 10 управления задает большим второе время Δtb1, которое задается, когда второе место для парковки является смежным с другим доступным местом для парковки (первым местом для парковки или третьим местом для парковки), чем второе время Δtb1, которое задается, когда второе место для парковки не является смежным с другим доступным местом для парковки (первым местом для парковки или третьим местом для парковки).
[0119] Когда второе место для парковки является смежным с другим доступным местом для парковки (первым местом для парковки или третьим местом для парковки), имеется очень высокая вероятность того, что переход места для парковки (доступного места для парковки/рекомендованного места для парковки) возникает за короткое время. В таком случае, предпочтительно уведомлять водителя заблаговременно в отношении того, что второе место для парковки будет доступным. Ввиду этого, когда второе место для парковки является смежным с другим доступным местом для парковки, второе время Δtb1 продлевается по сравнению с тем, когда они не являются смежными. Чтобы продлевать второе время Δtb1, временной интервал TB1 начала третьей формы для отображения может становиться более ранним. Это позволяет удлинять время, в течение которого предполагается второе место для парковки.
[0120] С точки зрения обеспечения достаточного времени для выбора места для парковки, в процессе обнаружения рекомендованного места для парковки, которое удовлетворяет условию парковки, из вышеописанных доступных мест для парковки, когда первое место для парковки извлекается в качестве рекомендованного места для парковки в предыдущем первом временном интервале, предпочтительно извлекать второе место для парковки, которое не является смежным с первым местом для парковки, в качестве рекомендованного места для парковки в последующем втором временном интервале. Если смежное место для парковки выбирается в качестве рекомендованного места для парковки, период переключения отображения рекомендованного места для парковки сокращается. Если места для парковки переключаются за короткое время, для водителя может быть затруднительным выбирать целевое место для парковки. Когда ранее извлеченное рекомендованное место для парковки и текущее извлеченное рекомендованное место для парковки являются смежными друг с другом, текущее извлеченное рекомендованное место для парковки не отображается. Это позволяет продлевать время для отображения рекомендованного места для парковки, чтобы обеспечивать время для выбора водителя.
[0121] Далее описываются формы для отображения согласно одному или более вариантов осуществления настоящего изобретения.
В одном или более вариантов осуществления настоящего изобретения, первая форма для отображения и вторая форма для отображения имеют следующие признаки.
(1) Яркость
(2) Толщина линий схематических изображений
(3) Форма линий, к примеру, сплошные линии, пунктирные линии и сдвоенные линии
(4) Форма размера (масштабирования) схематических изображений
(5) Присутствие или отсутствие отображения в форме мигания, период отображения в форме мигания
(6) Цветовая фаза, яркость, хроматичность, оттенок (тон), рисунок и градация схематических изображений
(7) Пиксельная плотность
(8) Отображение обратного отсчета
[0122] В одном или более вариантов осуществления настоящего изобретения, взаимосвязь между первой формой для отображения и второй формой для отображения может задаваться, как указано ниже.
(A) Способ отображения с затемнением
Он представляет собой способ, в котором изображение, указывающее первое место для парковки, отображается с постепенным размытием (без помощи выделения).
Вышеописанная первая форма для отображения представляет выделенное отображение, в то время как вторая форма для отображения представляет невыделенное отображение. Выделенное отображение изображений означает форму для отображения, которая обеспечивает относительно сильное управляющее воздействие для зрения водителя и пассажиров и привлекает относительно сильное внимание человека. Невыделенное отображение изображений означает форму для отображения, которая имеет относительно слабый эффект привлечения внимания водителя и пассажиров. В частности, первая форма для отображения и вторая форма для отображения задаются следующим образом. Первая форма для отображения и вторая форма для отображения, заданные таким способом, могут переключаться, чтобы за счет этого уведомлять в отношении перехода доступных мест для парковки/рекомендованного места для парковки.
[0123] (1) Первая форма для отображения представляет собой отображение с высокой яркостью, в то время как вторая форма для отображения представляет собой отображение с низкой яркостью. Отображение с высокой яркостью означает форму для отображения, в которой яркость задается относительно высокой.
(2) Толщина линий схематических изображений в первой форме для отображения задается относительно большой, в то время как толщина линий схематических изображений во второй форме для отображения задается относительно небольшой.
(3) Схема в первой форме для отображения указывается посредством сплошной линии, в то время как схема во второй форме для отображения указывается посредством пунктирной линии. Схема в первой форме для отображения указывается посредством сдвоенной линии, в то время как схема во второй форме для отображения указывается посредством сплошной линии или пунктирной линии.
(4) Размер схематического изображения в первой форме для отображения задается относительно большим, в то время как размер схематического изображения во второй форме для отображения задается относительно небольшим.
(5) Первая форма для отображения представляет собой отображение в форме мигания, в то время как вторая форма для отображения представляет собой отображение в форме без мигания. Отображение в форме мигания означает форму для отображения, в которой отображение и отсутствие отображения повторяются с предварительно определенным периодом, или подсвечивание и гашение повторяются. Период мигания в отображении в форме мигания первой формы для отображения задается относительно большим, в то время как период мигания в отображении в форме мигания второй формы для отображения задается относительно небольшим.
(6) Схема, окрашенная в первой форме для отображения отображается, в обеспечивающем эффект приближения цвете, при котором окрашенная схема наблюдается относительно близко, в то время как схема, окрашенная во второй форме для отображения, отображается в обеспечивающем эффект отдаления цвете, при котором окрашенная схема наблюдается относительно далеко. Обеспечивающий эффект приближения цвет означает цвет, при котором окрашенная схема наблюдается относительно близко, т.е. относительно теплый цвет с высокой яркостью и/или высокой хроматичностью в цветовом круге, например, желтый, оранжевый и красный. С другой стороны, обеспечивающий эффект отдаления цвет означает цвет, при котором окрашенная схема наблюдается относительно далеко, т.е. относительно холодный цвет с низкой яркостью и/или низкой хроматичностью в цветовом круге, например, синий, фиолетовый и черный. Изображение, отображаемое с таким обеспечивающим эффект приближения цветом, наблюдается с помощью относительного выделения.
(7) Пиксельная плотность в первой форме для отображения увеличивается, в то время как пиксельная плотность во второй форме для отображения уменьшается. Пиксельная плотность означает плотность пикселов в области, соответствующей схематическому изображению. Чем выше пиксельная плотность, тем более выделенным является отображение, тогда как, чем ниже пиксельная плотность, тем менее выделенным является отображение.
(8) Отображение обратного отсчета не проводится в первой форме для отображения, в то время как отображение обратного отсчета проводится во второй форме для отображения.
[0124] Фиг. 9A является набором видов, иллюстрирующих пример первой формы для отображения и примеры второй формы для отображения. Пример первой формы для отображения проиллюстрирован в части (a) по фиг. 9A, в то время как примеры второй формы для отображения проиллюстрированы в части (b) по фиг. 9A.
В первой форме для отображения, проиллюстрированной в части (a) по фиг. 9A, рамка, указывающая место для парковки, указывается посредством сплошной линии, и толщина рамки отображается относительно большой. Часть (b) по фиг. 9A иллюстрирует два примера b1 и b2 отображения во второй форме для отображения. Во второй форме для отображения, проиллюстрированной в части (b1), рамка, указывающая место для парковки, отображается посредством пунктирной линии. Во второй форме для отображения, проиллюстрированной в части (b2), толщина рамки, указывающей место для парковки, отображается относительно небольшой по сравнению с толщиной в первой форме для отображения (a). Оба из двух примеров b1 и b2 отображения во второй форме для отображения, проиллюстрированной в части (b) по фиг. 9A, представляют собой формы для отображения, которые отличаются от первой формы для отображения и которые являются более незаметными по сравнению с первой формой для отображения. В примере отображения, проиллюстрированном в части (b2), толщина рамки, указывающей место для парковки, отображается относительно небольшой по сравнению с примером отображения, проиллюстрированным в части (b1). Пример b2 отображения является более незаметным отображением по сравнению с примером b1 отображения.
[0125] Ниже описываются примеры отображения на основе управления по фиг. 8A. Часть (a) по фиг. 9A в первой форме для отображения отображается во временном интервале T1, и часть (b1) по фиг. 9A во второй форме для отображения затем отображается во временном интервале TA1. Посредством изменения формы для отображения во временном интервале TA1, водитель может уведомляться в отношении того, что место для парковки будет изменяться. Форма для отображения может изменяться со второй формы (b1) для отображения на вторую форму (b2) для отображения после временного интервала TA1 и перед временным интервалом TA2. Как проиллюстрировано на фиг. 8A, изменение со второй формы (b1) для отображения может представлять собой непрерывное изменение, такое как постепенное увеличение шага пунктирной линии и постепенное уменьшение толщины пунктирной линии.
[0126] (B) Отображение с выходом из затемнения (отображение с постепенным повышением четкости)
В одном или более вариантов осуществления настоящего изобретения, взаимосвязь между третьей формой для отображения и четвертой формой для отображения может задаваться, как указано ниже.
Отображение с выходом из затемнения означает способ, в котором изображение, указывающее второе место для парковки, отображается с постепенным повышением четкости (с помощью выделения). Второе место для парковки отображается в третьей форме для отображения без помощи выделения и затем отображается в четвертой форме для отображения с помощью выделения. В частности, третья форма для отображения и четвертая форма для отображения задаются следующим образом. Чтобы исключать дублированное описание, описание отображения с затемнением заимствуется в данном документе. Третья форма для отображения и четвертая форма для отображения, заданные таким способом, могут переключаться, чтобы за счет этого уведомлять в отношении перехода доступных мест для парковки/рекомендованного места для парковки.
[0127] (1) Третья форма для отображения представляет собой отображение с низкой яркостью, в то время как четвертая форма для отображения представляет собой отображение с высокой яркостью.
(2) Толщина линий схематических изображений в третьей форме для отображения задается относительно небольшой, в то время как толщина линий схематических изображений в четвертой форме для отображения задается относительно большой.
(3) Схема в третьей форме для отображения указывается посредством пунктирной линии, в то время как схема в четвертой форме для отображения указывается посредством сплошной линии. Схема в третьей форме для отображения указывается посредством сплошной линии или пунктирной линии, в то время как схема в четвертой форме для отображения указывается посредством сдвоенной линии.
(4) Размер схематического изображения в третьей форме для отображения задается относительно небольшим, в то время как размер схематического изображения в четвертой форме для отображения задается относительно большим.
(5) Третья форма для отображения представляет собой отображение в форме без мигания, в то время как четвертая форма для отображения представляет собой отображение в форме мигания. Период мигания в отображении в форме мигания третьей формы для отображения задается относительно небольшим, в то время как период мигания в отображении в форме мигания четвертой формы для отображения задается относительно большим.
(6) Схема, окрашенная в третьей форме для отображения, отображается в обеспечивающем эффект отдаления цвете, в то время как схема, окрашенная в четвертой форме для отображения, отображается в обеспечивающем эффект приближения цвете.
(7) Пиксельная плотность в третьей форме для отображения уменьшается, в то время как пиксельная плотность в четвертой форме для отображения увеличивается.
(8) Отображение обратного отсчета проводится в третьей форме для отображения, в то время как отображение обратного отсчета не проводится в четвертой форме для отображения.
[0128] Фиг. 9B является набором видов, иллюстрирующих пример третьей формы для отображения и примеры четвертой формы для отображения. Пример третьей формы для отображения проиллюстрирован в части (a) по фиг. 9B, в то время как примеры четвертой формы для отображения проиллюстрированы в части (b) по фиг. 9B.
В третьей форме для отображения, проиллюстрированной в части (a) по фиг. 9B, рамка, указывающая место для парковки, указывается посредством пунктирной линии, и толщина рамки отображается относительно небольшой. Часть (b) по фиг. 9B иллюстрирует два примера b1 и b2 отображения в четвертой форме для отображения. В четвертой форме для отображения, проиллюстрированной в части (b1), рамка, указывающая место для парковки, отображается посредством пунктирной линии. В четвертой форме для отображения, проиллюстрированной в части (b2), толщина рамки, указывающей место для парковки, отображается относительно большей по сравнению с толщиной в третьей форме для отображения (a). Оба из двух примеров b1 и b2 отображения в четвертой форме для отображения, проиллюстрированной в части (b) по фиг. 9B, представляют собой формы для отображения, которые отличаются от третьей формы для отображения и которые являются более заметными (выделенными) по сравнению с третьей формой для отображения. В примере отображения, проиллюстрированном в части (b2), рамка, указывающая место для парковки, отображается посредством сплошной линии, которая является относительно выделенной по сравнению с примером отображения пунктирной линии, проиллюстрированным в части (b1).
[0129] Ниже описываются примеры отображения на основе управления по фиг. 8B. Часть (a) по фиг. 9B в третьей форме для отображения отображается во временном интервале TB1, и часть (b1) по фиг. 9B в четвертой форме для отображения затем отображается во временном интервале T2. Посредством указания позиции второго места для парковки в различных формах для отображения во временном интервале TB1, водитель может уведомляться в отношении того, что выбор нового отображаемого места для парковки будет разрешаться. Форма для отображения может изменяться с третьей формы (b1) для отображения на четвертую форму (b2) для отображения после временного интервала TB1 и перед временным интервалом T2. Как проиллюстрировано на фиг. 8B, изменение из третьей формы (b1) для отображения может представлять собой непрерывное изменение, такое как постепенное уменьшение шага пунктирной линии и постепенное увеличение толщины пунктирной линии.
[0130] В одном или более вариантов осуществления настоящего изобретения, устройство 4 выдачи уведомлений используется для того, чтобы привлекать внимание водителя. Когда оценивается то, что первое место для парковки не будет удовлетворять условию парковки, либо когда оценивается то, что второе место для парковки, отличное от первого места для парковки, будет удовлетворять условию парковки, устройство 10 управления изменяет режим уведомления устройства 4 выдачи уведомлений. В качестве примера, устройство 10 управления управляет устройством 4 выдачи уведомлений для того, чтобы выполнять уведомление в первом режиме уведомления, когда первое место для парковки отображается в первой форме для отображения, и выполнять уведомление во втором режиме уведомления, отличающемся от первого режима уведомления, когда первое место для парковки отображается во второй форме для отображения.
[0131] Таким образом, когда оценивается то, что первое место для парковки не будет удовлетворять условию парковки, либо когда оценивается то, что второе место для парковки, отличное от первого места для парковки, будет удовлетворять условию парковки, устройство 4 выдачи уведомлений изменяет режим уведомления, и ввиду этого водитель может четко уведомляться в отношении временного интервала, в который первое место для парковки может выбираться. Это изменение режима уведомления может уведомлять водителя в отношении того, что выбор первого места для парковки не будет разрешаться.
[0132] Помимо этого или альтернативно, когда оценивается то, что второе место для парковки будет удовлетворять условию парковки, устройство 10 управления согласно одному или более вариантов осуществления настоящего изобретения изменяет режим уведомления устройства 4 выдачи уведомлений. Устройство 10 управления использует устройство 4 выдачи уведомлений для того, чтобы уведомлять в отношении второго места для парковки в третьей форме для отображения и затем уведомлять в отношении второго места для парковки в четвертой форме для отображения. Когда второе место для парковки отображается в третьей форме для отображения, устройство 10 управления использует устройство 4 выдачи уведомлений для того, чтобы выполнять уведомление в третьем режиме уведомления. Когда второе место для парковки отображается в четвертой третьей форме для отображения, устройство 10 управления использует устройство 4 выдачи уведомлений для того, чтобы выполнять уведомление в четвертом режиме уведомления.
[0133] Таким образом, когда оценивается то, что второе место для парковки будет удовлетворять условию парковки, режим уведомления изменяется, и водитель может уведомляться в отношении того, что выбор второго места для парковки будет разрешаться.
[0134] Ниже описываются режимы уведомления. В одном или более вариантов осуществления настоящего изобретения, первый режим уведомления и второй режим уведомления имеют следующие признаки.
Режим уведомления относительно голоса или звука
(1) Уровень громкости
(2) Период
Режим уведомления относительно подсвечивания
(1) Яркость
(2) Период мигания
Режим уведомления относительно вибрации
(1) Интенсивность
(2) Период
[0135] В одном или более вариантов осуществления настоящего изобретения, взаимосвязь между первым режимом уведомления и вторым режимом уведомления может задаваться следующим образом.
(A) Способ уведомления с затемнением
Он представляет собой способ постепенного ослабления интенсивности вывода, который уведомляет в отношении того, что отображается первое место для парковки. Обнаружение первого места для парковки уведомляется с помощью выделения и затем уведомляется способом, в котором выделение ослабляется. Уведомление, в котором интенсивность вывода является выделенной, означает уведомление, которое обеспечивает относительно сильное управляющее воздействие для зрения/слуха/осязания водителя и пассажиров и привлекает относительно сильное внимание человека. Уведомление, в котором выделение вывода подавляется (отображение без выделения), означает уведомление, которое имеет относительно слабый эффект привлечения внимания водителя и пассажиров. В частности, первый режим уведомления и второй режим уведомления задаются следующим образом.
Определение режима уведомления относительно голоса или звука
(1) Первый режим уведомления задается с более высоким уровнем громкости, в то время как второй режим уведомления задается с более низким уровнем громкости.
(2) Период вывода голоса или звука в первом режиме уведомления задается большим, в то время как период вывода голоса или звука во втором режиме уведомления задается меньшим. Голос или звук короткого периода может уведомлять в отношении того, что временной предел для выбора первого места для парковки приближается.
Определение режима уведомления относительно подсвечивания
(1) Первый режим уведомления уведомляется посредством подсвечивания с более высокой яркостью, в то время как второй режим уведомления уведомляется посредством подсвечивания с меньшей яркостью.
(2) Период мигания первого режима уведомления задается большим, в то время как период мигания второго режима уведомления задается меньшим. Подсвечивание с коротким периодом мигания может уведомлять в отношении того, что временной предел для выбора первого места для парковки приближается.
Режим уведомления относительно вибрации
(1) Первый режим уведомления уведомляется с более сильной вибрацией, в то время как второй режим уведомления уведомляется с более слабой вибрацией.
(2) Период вибрации первого режима уведомления задается большим, в то время как период вибрации второго режима уведомления задается меньшим. Вибрация с коротким периодом может уведомлять в отношении того, что временной предел для выбора первого места для парковки приближается.
[0136] (B) Способ уведомления с выходом из затемнения (уведомления с постепенным повышением четкости)
Он представляет собой способ постепенного усиления интенсивности вывода, который уведомляет в отношении того, что отображается третье место для парковки. Оценка того, что четвертое место для парковки будет обнаруживаться, уведомляется без помощи выделения (с ослабленной интенсивностью вывода) и затем уведомляется с помощью сильного выделения. Уведомление, в котором интенсивность вывода ослабляется, означает уведомление, которое обеспечивает относительно слабое управляющее воздействие для зрения/слуха/осязания водителя и пассажиров и привлекает внимание человека. Уведомление, в котором выделение вывода усилено (отображение с выделением), означает уведомление, которое привлекает сильное внимание водителя и пассажиров. В частности, третий режим уведомления и четвертый режим уведомления задаются следующим образом.
Определение режима уведомления относительно голоса или звука
(1) Третий режим уведомления задается с более низким уровнем громкости, в то время как четвертый режим уведомления задается с более высоким уровнем громкости.
(2) Период вывода голоса или звука в третьем режиме уведомления задается меньшим, в то время как период вывода голоса или звука в четвертом режиме уведомления задается большим.
Определение режима уведомления относительно подсвечивания
(1) Третий режим уведомления уведомляется посредством подсвечивания с меньшей яркостью, в то время как четвертый режим уведомления уведомляется посредством подсвечивания с более высокой яркостью.
(2) Период мигания третьего режима уведомления задается большим, в то время как период мигания четвертого режима уведомления задается меньшим. Подсвечивание с коротким периодом мигания может уведомлять в отношении того, что выбор второго места для парковки будет разрешаться.
Режим уведомления относительно вибрации
(1) Третий режим уведомления уведомляется с более слабой вибрацией, в то время как четвертый режим уведомления уведомляется с более сильной вибрацией.
(2) Период вибрации третьего режима уведомления задается меньшим, в то время как период вибрации четвертого режима уведомления задается большим. Вибрация с длительным периодом может уведомлять в отношении того, что выбор второго места для парковки будет разрешаться.
[0137] Способ помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения используется в устройстве помощи при парковке, как указано выше, и ввиду этого имеет следующие преимущества. Устройство 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения сконфигурировано и работает так, как указано выше, и ввиду этого имеет следующие преимущества.
[0138] (1) Согласно способу помощи при парковке/способу отображения информации помощи при парковке в одном или более вариантов осуществления настоящего изобретения, первое место для парковки, которое удовлетворяет предварительно заданному условию парковки, отображается в первой форме для отображения на дисплее 21, и когда оценивается то, что первое место для парковки не будет удовлетворять условию парковки, форма для отображения переключается с первой формы для отображения на вторую форму для отображения. Это позволяет уведомлять водителя в отношении того, что временной интервал, в который выбор первого места для парковки не будет разрешаться, приближается (оценивается то, что условие парковки не будет удовлетворяться).
Согласно способу помощи при парковке/способ отображения информации помощи при парковке в одном или более вариантов осуществления настоящего изобретения, когда оценивается то, что второе место для парковки, отличное от первого места для парковки, будет удовлетворять условию парковки, форма для отображения переключается с первой формы для отображения на вторую форму для отображения. Это позволяет уведомлять водителя в отношении того, что выбор второго места для парковки, которое является новым доступным, будет разрешаться (оценивается то, что условие парковки будет удовлетворяться). Помимо этого, водитель может уведомляться в отношении того, что имеется очень высокая вероятность того, что первое место для парковки, которое ранее отображается как удовлетворяющее условию парковки, не будет удовлетворять условию парковки (выбор первого места для парковки не будет разрешаться).
[0139] (2) Согласно способу в одном или более вариантов осуществления настоящего изобретения, первое время Δta1 от временного интервала TA1, в который первое место для парковки отображается во второй форме для отображения, до временного интервала TA2, в который не отображается первое место для парковки, может задаваться большим по мере того, как скорость рассматриваемого транспортного средства V является более высокой. Согласно способу в одном или более вариантов осуществления настоящего изобретения, в течение времени Δta2 от временного интервала T1 отображения в первой форме для отображения до временного интервала T2 завершения отображения во втором месте для парковки, временной интервал TA1 отображения во второй форме для отображения изменяется на более ранний временной интервал, чтобы задавать большим первое время Δta1 по мере того, как скорость рассматриваемого транспортного средства V является более высокой. Водитель и пассажиры ввиду этого могут уведомляться в отношении вероятности того, что выбора первого места для парковки не будет разрешаться, за относительно длительный период времени, даже когда скорость рассматриваемого транспортного средства V является высокой.
[0140] (3) Согласно способу в одном или более вариантов осуществления настоящего изобретения, когда оценивается то, что второе место для парковки, отличное от первого места для парковки, будет удовлетворять условию парковки, второе место для парковки может отображаться в третьей форме для отображения на дисплее 21 и затем отображаться в четвертой форме для отображения на дисплее 21. Таким образом, форма для отображения второго места для парковки может переключаться с третьей формы для отображения на четвертую форму для отображения, чтобы за счет этого уведомлять водителя в отношении того, что выбор второго места для парковки будет разрешаться.
[0141] (4) Согласно способу в одном или более вариантов осуществления настоящего изобретения, второе время Δtb1 от временного интервала TB1, в который второе место для парковки отображается в третьей форме для отображения, до временного интервала T2, в который второе место для парковки отображается в четвертой форме для отображения, может определяться в соответствии со скоростью рассматриваемого транспортного средства V. Это позволяет предоставлять водителю время для выбора второго места для парковки в соответствии со скоростью рассматриваемого транспортного средства V. В частности, по мере того, как скорость рассматриваемого транспортного средства V является более высокой, второе время Δtb1 может задаваться большим, чтобы за счет этого заблаговременно уведомлять в отношении того, что второе место для парковки может выбираться, по мере того, как скорость рассматриваемого транспортного средства V является более высокой. Водитель может обеспечивать достаточное время для предположения второго места для парковки.
[0142] (5) Согласно способу в одном или более вариантов осуществления настоящего изобретения, первое время Δta1, Δta1', которое задается, когда первое место для парковки и второе место для парковки являются смежными друг с другом, может задаваться большим, чем первое время Δta1, Δta1', которое задается, когда первое место для парковки и второе место для парковки не являются смежными друг с другом. Это позволяет предоставлять водителю период времени для выбора первого места для парковки в соответствии с компоновкой первого и второго мест для парковки, которые должны обнаруживаться. Когда первое место для парковки и второе место для парковки являются смежными друг с другом, имеется очень высокая вероятность того, что переход места для парковки (доступного места для парковки/рекомендованного места для парковки) возникает за короткое время. В таком случае, предпочтительно уведомлять водителя заблаговременно в отношении того, что первое место для парковки не будет доступным. Когда первое место для парковки и второе место для парковки являются смежными друг с другом, первое время Δta1, Δta1' продлевается по сравнению с тем, когда они не являются смежными. Это позволяет удлинять время, в течение которого может выбираться первое место для парковки, даже когда множество доступных мест для парковки являются смежными друг с другом, и водитель может обеспечивать время для выбора первого места для парковки.
[0143] (6) Согласно способу в одном или более вариантов осуществления настоящего изобретения, второе время Δtb1, которое задается, когда второе место для парковки является смежным с другим доступным местом для парковки, может задаваться большим, чем второе время Δtb1, которое задается, когда второе место для парковки не является смежным с другим доступным местом для парковки. Это позволяет предоставлять водителю период времени для выбора второго места для парковки в соответствии с компоновкой второго места для парковки, которое должно обнаруживаться. Когда второе место для парковки является смежным с другим местом для парковки, которое удовлетворяет условию парковки, имеется очень высокая вероятность того, что переход места для парковки (доступного места для парковки/рекомендованного места для парковки) возникает за короткое время. В таком случае, предпочтительно уведомлять водителя заблаговременно в отношении того, что второе место для парковки не будет доступным. Когда второе место для парковки является смежным с другим местом для парковки, которое удовлетворяет условию парковки, второе время Δtb1 продлевается по сравнению с тем, когда они не являются смежными. Это позволяет удлинять время, в течение которого может выбираться второе место для парковки, даже когда множество доступных мест для парковки являются смежными друг с другом, и водитель может обеспечивать время для выбора второго места для парковки.
[0144] (7) Согласно способу в одном или более вариантов осуществления настоящего изобретения, из доступных мест для парковки, рекомендованное место Mr для парковки, удовлетворяющее условию рекомендации по парковке условия парковки, которое задает место для парковки для рекомендации, может отображаться в первой форме для отображения. Места для парковки, которые удовлетворяют условию парковки, сужаются до рекомендованного места для парковки, которое рекомендуется водителю, с использованием условия рекомендации, которое предварительно определяется. Рекомендованное место для парковки представляет собой место для парковки, которому является более рекомендованным для выбора в качестве целевого места для парковки, чем доступное место для парковки. Согласно способу в одном или более вариантов осуществления настоящего изобретения, в окружении, в котором намечена парковка, водитель может в достаточной степени предполагать рекомендованное место для парковки.
[0145] (8) Согласно способу в одном или более вариантов осуществления настоящего изобретения, из доступных мест для парковки, первое место для парковки может извлекаться в качестве рекомендованного места для парковки в первый временной интервал, и второе место для парковки, которое не является смежным с первым местом для парковки, может извлекаться в качестве рекомендованного места для парковки во второй временной интервал после первого временного интервала. Если смежное место для парковки выбирается и отображается в качестве рекомендованного места для парковки, период переключения отображения мест для парковки сокращается. Если рекомендованное место для парковки переключается за короткое время, для водителя может быть затруднительным выбирать целевое место для парковки. Когда ранее извлеченное рекомендованное место для парковки и текущее извлеченное рекомендованное место для парковки являются смежными друг с другом, текущее извлеченное рекомендованное место для парковки не отображается. Это позволяет продлевать время для отображения рекомендованного места для парковки, чтобы обеспечивать время для выбора водителя.
[0146] (9) Согласно способу в одном или более вариантов осуществления настоящего изобретения, когда первое место для парковки отображается в первой форме для отображения, устройство 4 выдачи уведомлений используется для того, чтобы выполнять уведомление в первом режиме уведомления, в то время как, когда первое место для парковки отображается во второй форме для отображения, устройство 4 выдачи уведомлений используется для того, чтобы выполнять уведомление во втором режиме уведомления, который отличается от первого режима уведомления. Когда оценивается то, что первое место для парковки не будет удовлетворять условию парковки, либо когда оценивается то, что второе место для парковки, отличное от первого места для парковки, будет удовлетворять условию парковки, режим уведомления изменяется, и ввиду этого водитель может четко уведомляться в отношении временного интервала, в который первое место для парковки может выбираться. Это изменение режима уведомления может уведомлять водителя в отношении того, что выбор первого места для парковки не будет разрешаться.
[0147] (10) Согласно способу в одном или более вариантов осуществления настоящего изобретения, когда второе место для парковки отображается в третьей форме для отображения, устройство 4 выдачи уведомлений используется для того, чтобы выполнять уведомление в третьем режиме уведомления, в то время как, когда второе место для парковки отображается в четвертой форме для отображения, устройство 4 выдачи уведомлений используется для того, чтобы выполнять уведомление в четвертом режиме уведомления, который отличается от третьего режима уведомления. Таким образом, когда оценивается то, что второе место для парковки будет удовлетворять условию парковки, режим уведомления может изменяться, чтобы за счет этого уведомлять водителя в отношении того, что выбор второго места для парковки будет разрешаться.
[0148] (11) Согласно способу в одном или более вариантов осуществления настоящего изобретения, когда период времени между временным интервалом, в который первое место для парковки удовлетворяет условию парковки, и временным интервалом, в который второе место для парковки удовлетворяет условию парковки, не превышает предварительно определенный период времени, запрещается переключение формы для отображения первого места для парковки с первой формы для отображения на вторую форму для отображения, даже когда оценивается то, что второе место для парковки, отличное от первого места для парковки, будет удовлетворять условию парковки, и отображение первого места для парковки в первой форме для отображения продолжается. В этом способе, когда период времени между временным интервалом, в который первое место для парковки удовлетворяет условию парковки, и временным интервалом, в который второе место для парковки удовлетворяет условию парковки, не превышает предварительно определенный период времени, этот случай количественно оценивается/оценивается в качестве случая, в котором доступные места для парковки находятся близко друг к другу, или случая, в котором скорость транспортного средства для рассматриваемого транспортного средства V является высокой, и изменение формы для отображения первого места для парковки сразу запрещается, с тем чтобы продолжать отображение в первой форме для отображения. Это обеспечивает возможность водителю или пассажирам легко выбирать первое место для парковки, поскольку продлевается время, в течение которого выбирается первое место для парковки.
[0149] (12) Согласно устройству 100 помощи при парковке в одном или более вариантов осуществления настоящего изобретения, первое место для парковки, которое удовлетворяет предварительно заданному условию парковки, отображается в первой форме для отображения на дисплее 21, и когда оценивается то, что первое место для парковки не будет удовлетворять условию парковки, либо когда оценивается то, что второе место для парковки, отличное от первого места для парковки, будет удовлетворять условию парковки, первое место для парковки отображается во второй форме для отображения, которая отличается от первой формы для отображения, на дисплее 21. Вышеописанный способ помощи при парковке/способ отображения информации помощи при парковке может выполняться с использованием устройства 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения. Устройство 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения ввиду этого имеет вышеописанную работу и преимущества.
[0150] Варианты осуществления, поясненные выше, описываются для того, чтобы упрощать понимание настоящего изобретения, а не для того, чтобы ограничивать настоящее изобретение. Следовательно, подразумевается, что элементы, раскрытые в вышеописанных вариантах осуществления, включают в себя все конструктивные модификации и эквиваленты, которые попадают в пределы объема настоящего изобретения.
[0151] Таким образом, в настоящем описании, пример устройства 100 помощи при парковке, имеющего устройство 10 управления и дисплей 21, описывается как вариант осуществления устройства помощи при парковке согласно настоящему изобретению, но настоящее изобретение не ограничено этим.
Описание позиционных обозначений
[0152] 1000 - система помощи при парковке
100 - устройство помощи при парковке
10 - устройство управления
11 - CPU
12 - ROM
13 - RAM
20 - устройство вывода
21 - дисплей
1a-1d - бортовые камеры
2 - устройство обработки изображений
3 - устройство измерения дальности
4 - устройство выдачи уведомлений
41 - динамик
42 - лампа
43 - генератор вибраций
30 - контроллер транспортного средства
40 - приводная система
50 - датчик угла поворота при рулении
60 - датчик скорости транспортного средства
V - рассматриваемое транспортное средство
Me - доступное место для парковки, метка доступности парковки.
Mr - рекомендованное место для парковки, метка рекомендации
Mo - целевое место для парковки
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ | 2015 |
|
RU2703478C1 |
| СПОСОБ ОТОБРАЖЕНИЯ ИНФОРМАЦИИ СОДЕЙСТВИЯ ПРИ ПАРКОВКЕ И УСТРОЙСТВО СОДЕЙСТВИЯ ПРИ ПАРКОВКЕ | 2015 |
|
RU2691540C1 |
| СПОСОБ ПОМОЩИ ПРИ ПАРКОВКЕ ДЛЯ УСТРОЙСТВА ПОМОЩИ ПРИ ПАРКОВКЕ И УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ | 2017 |
|
RU2734643C1 |
| УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ | 2015 |
|
RU2652678C1 |
| СПОСОБ И УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ | 2015 |
|
RU2691457C1 |
| СПОСОБ ПОМОЩИ ПРИ ПАРКОВКЕ И УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ | 2017 |
|
RU2729330C1 |
| СПОСОБ (ВАРИАНТЫ) И УСТРОЙСТВО СОДЕЙСТВИЯ ПРИ ПАРКОВКЕ | 2015 |
|
RU2691463C1 |
| СПОСОБ ПОМОЩИ ПРИ ПАРКОВКЕ И УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ | 2017 |
|
RU2734740C1 |
| СПОСОБ И УСТРОЙСТВО ОБНАРУЖЕНИЯ МЕСТ ДЛЯ ПАРКОВКИ | 2015 |
|
RU2700635C1 |
| СПОСОБ ПОМОЩИ ПРИ ПАРКОВКЕ И УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ | 2016 |
|
RU2714656C1 |
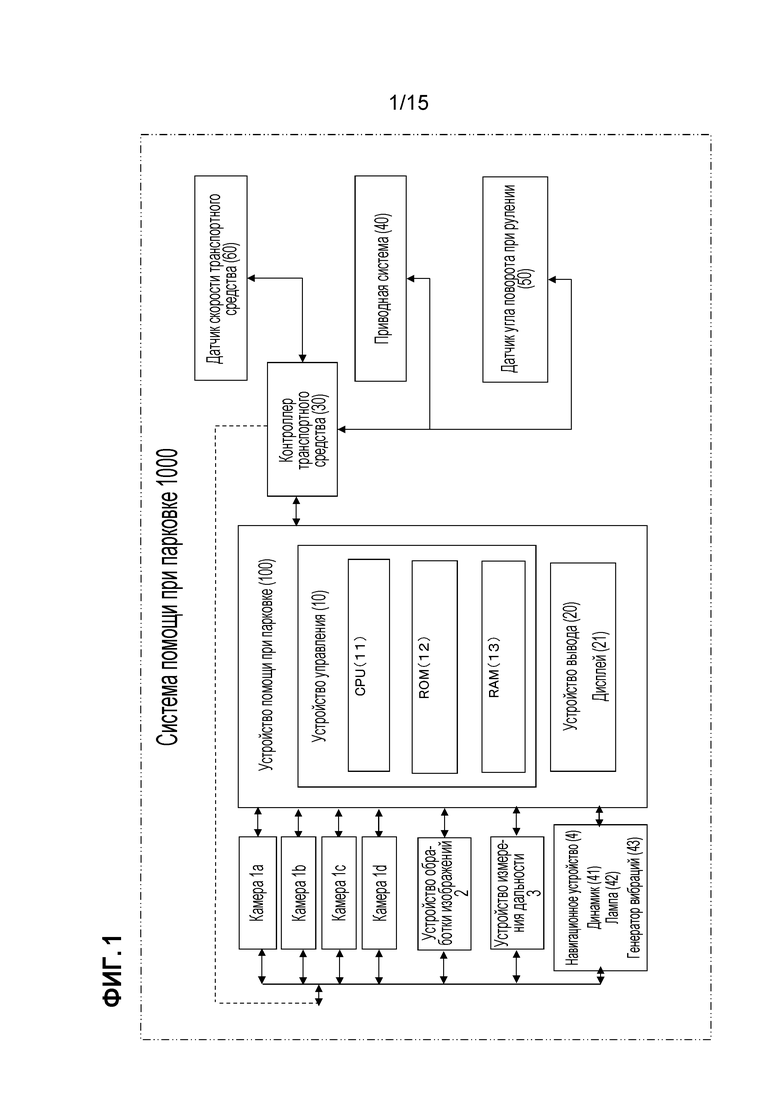
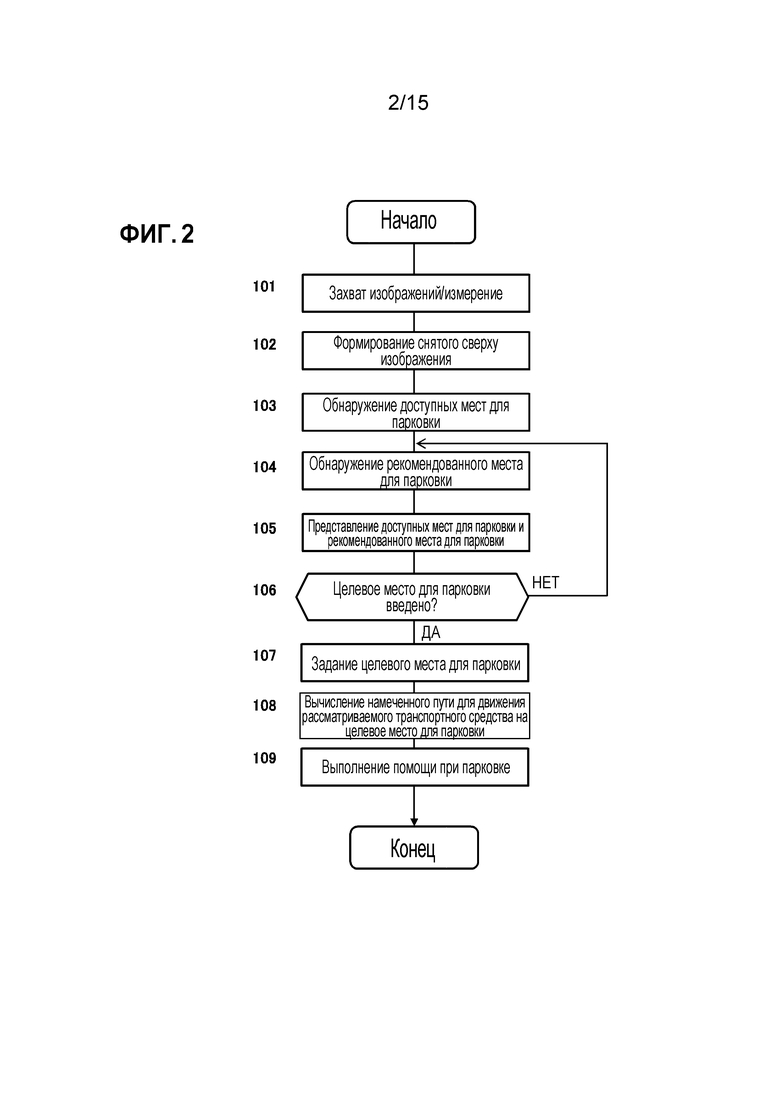
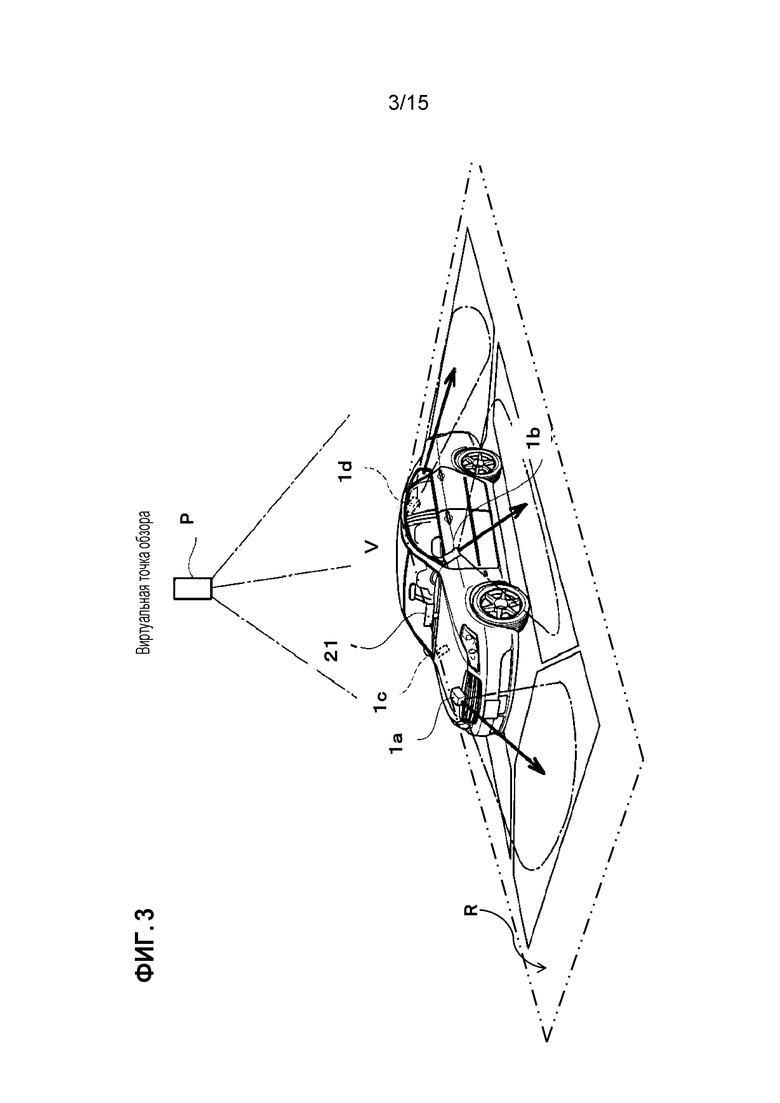
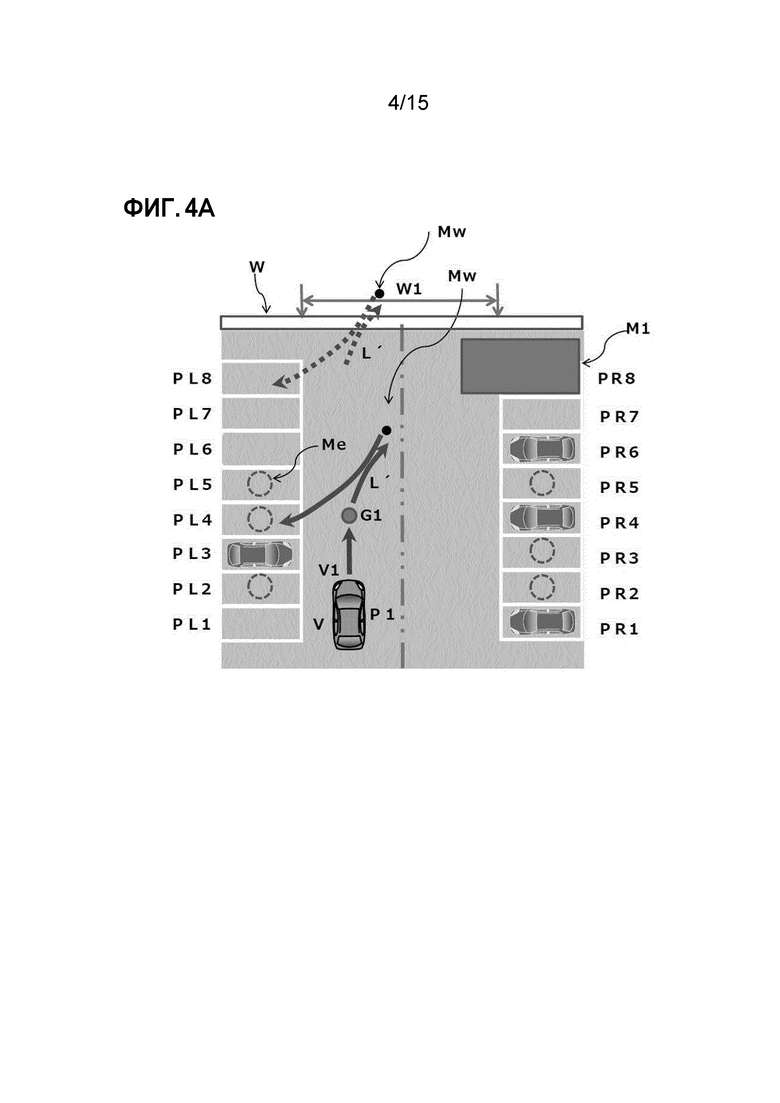


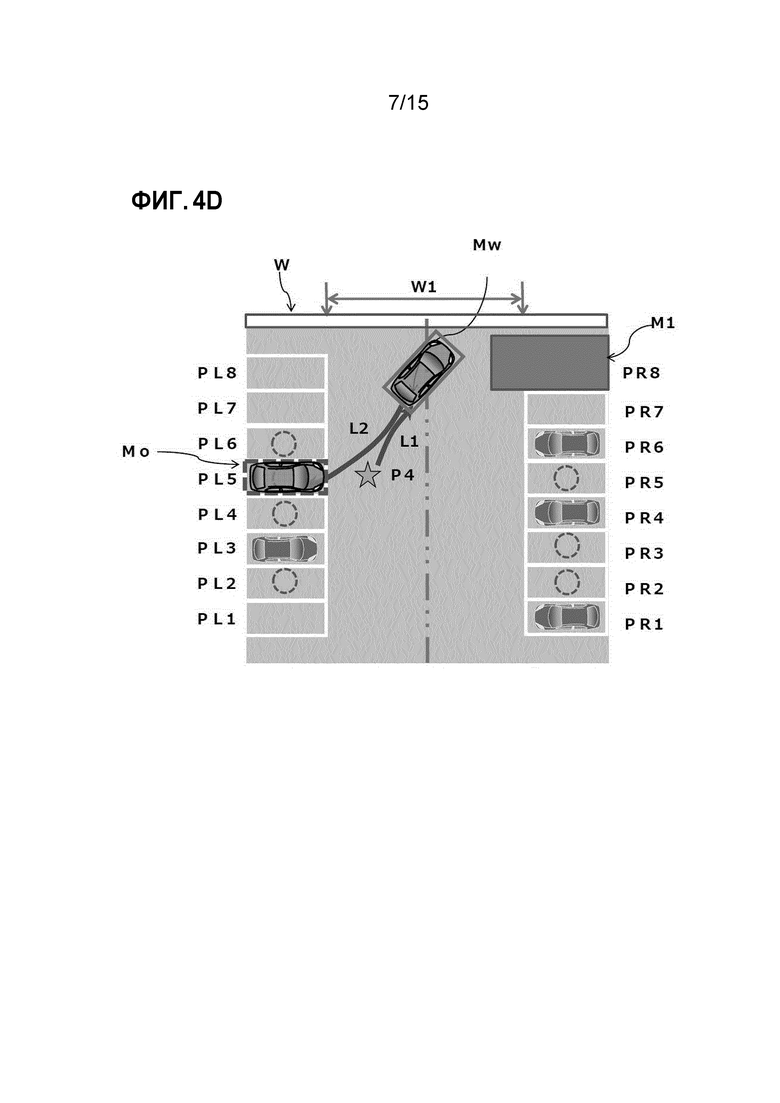

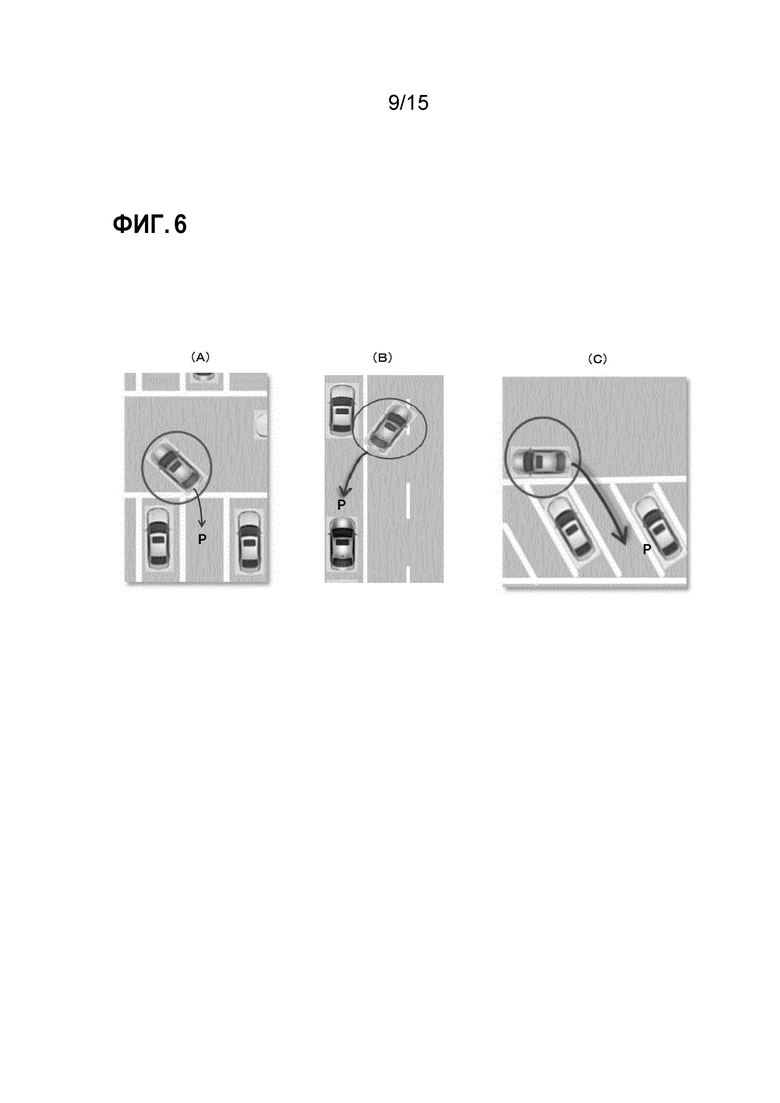

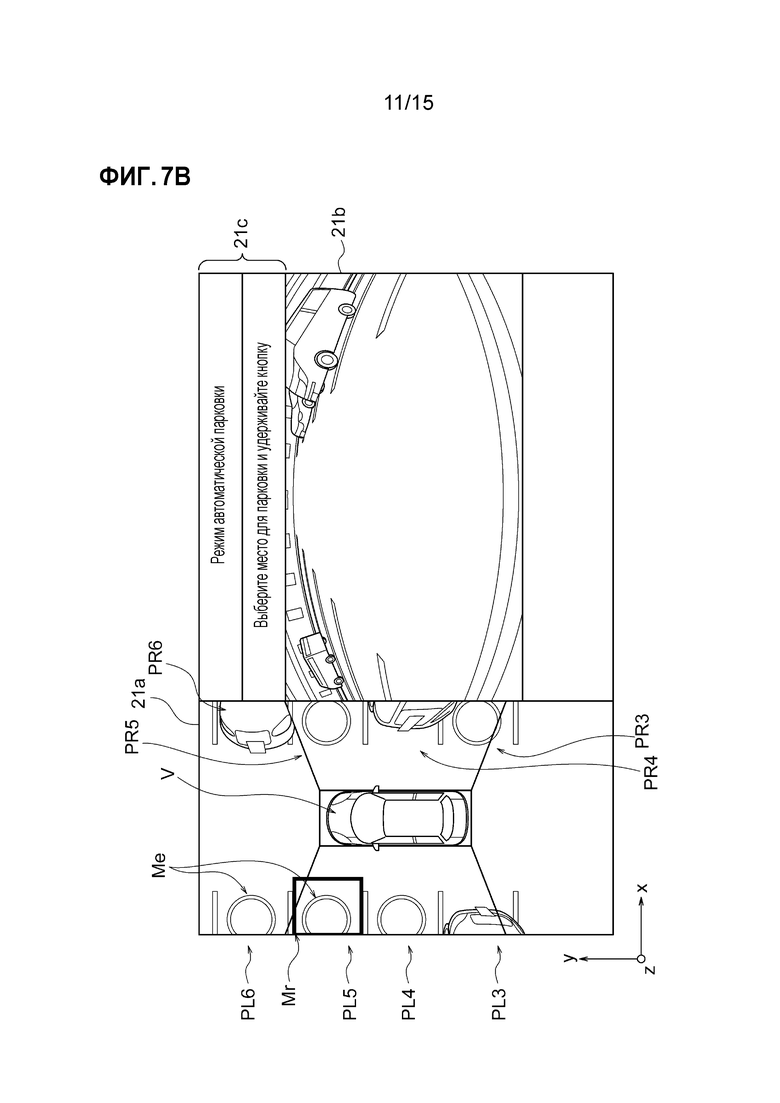
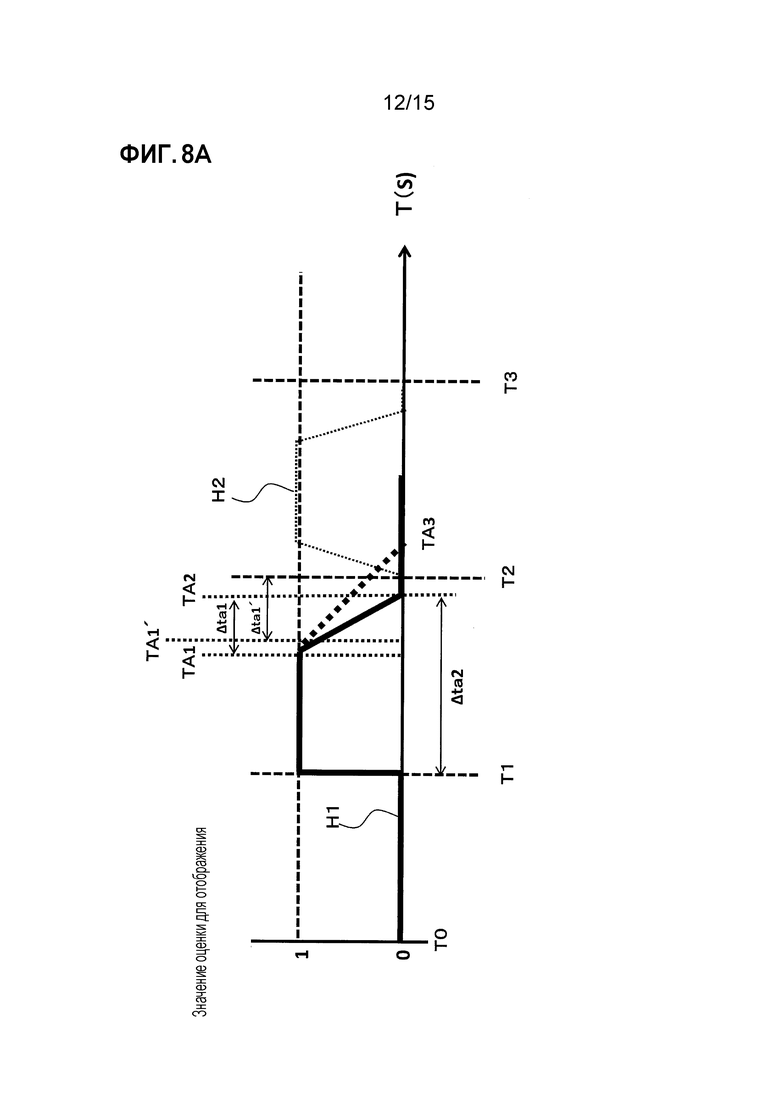
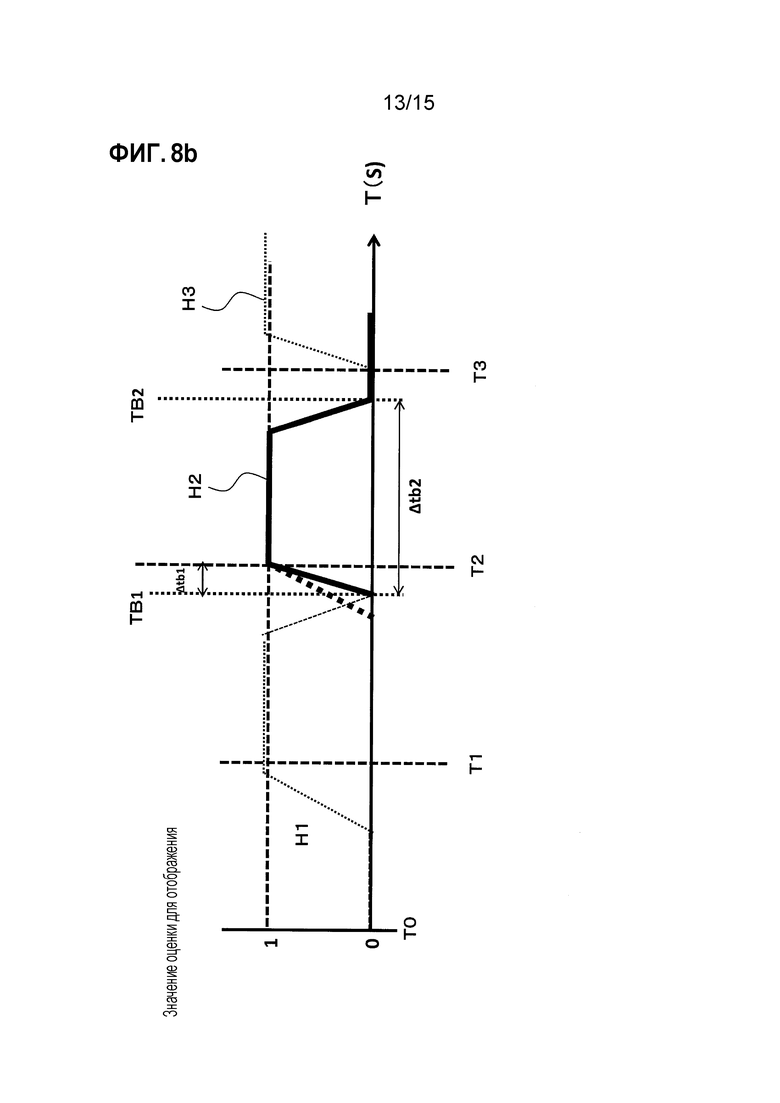
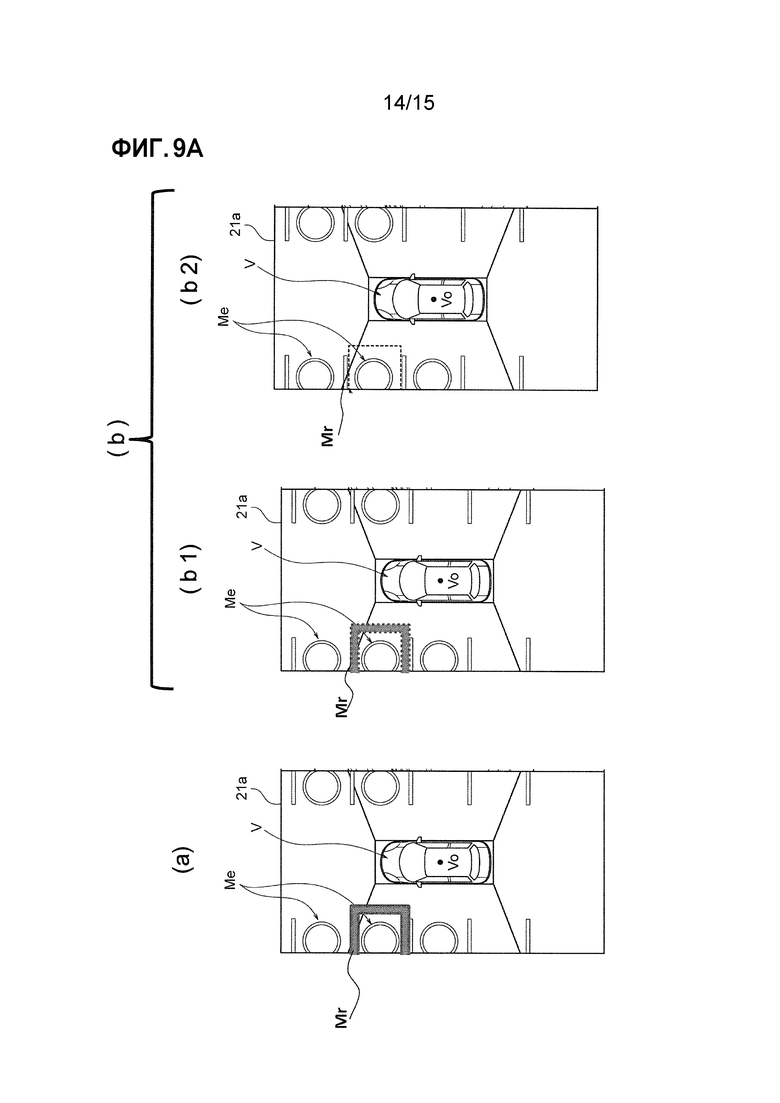
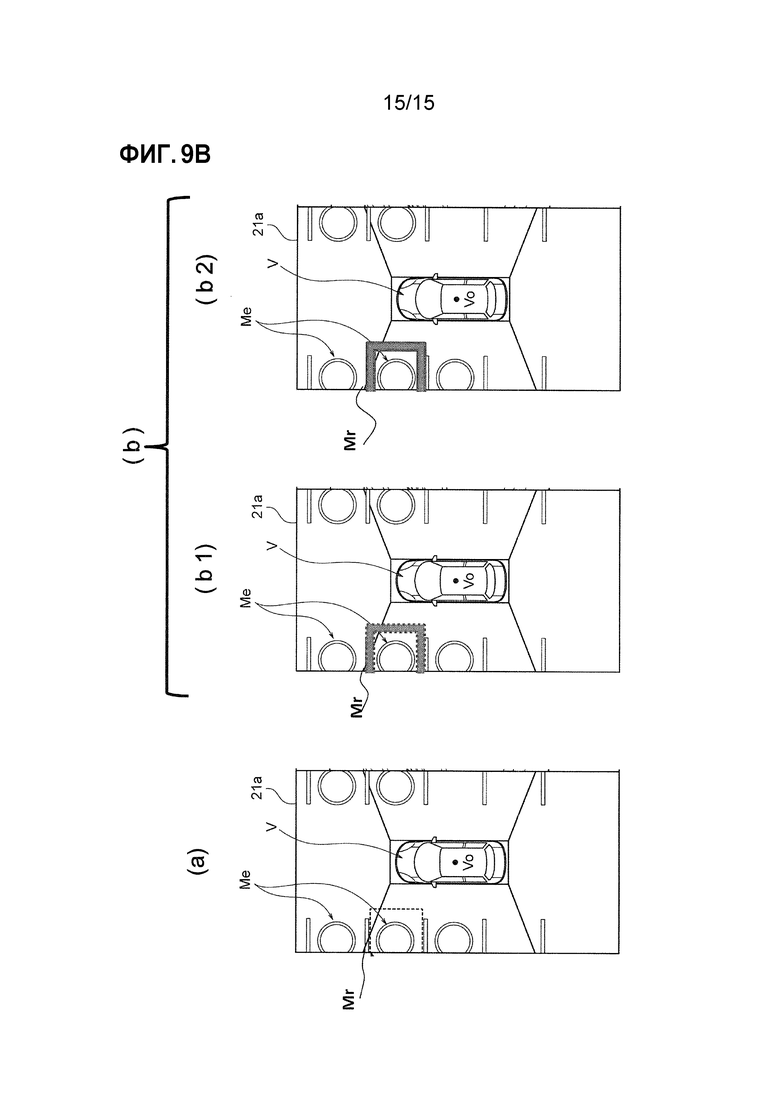
Группа изобретений относится к способу отображения информации помощи при парковке и устройству помощи при парковке. Способ, осуществляющийся устройством помощи при парковке, содержит дисплей и устройство управления. Устройство управления отображает первое место для парковки в первой форме для отображения на дисплее. Первое место для парковки удовлетворяет условию парковки, которое предварительно задается. Когда оценивается то, что первое место для парковки не будет удовлетворять условию парковки, или второе место для парковки, отличное от первого места для парковки, будет удовлетворять условию парковки, устройство управления отображает первое место для парковки во второй форме для отображения, отличающейся от первой формы для отображения, на дисплее. Обеспечивается предотвращение внезапного изменения отображения места для парковки по мере того, как рассматриваемое транспортное средство перемещается. 3 н. и 10 з.п. ф-лы, 15 ил. 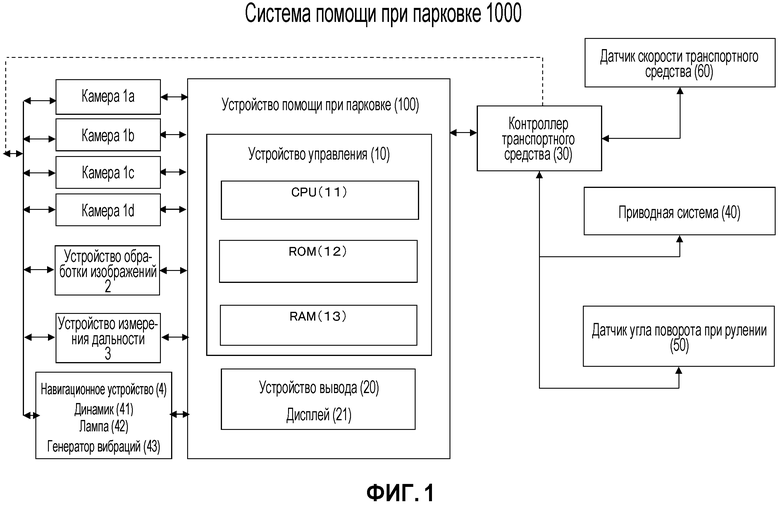
1. Способ отображения информации помощи при парковке, причем способ используется в устройстве помощи при парковке, содержащем дисплей и устройство управления,
причем устройство управления выполнено с возможностью:
отображать первое место для парковки в первой форме для отображения на дисплее, причем первое место для парковки удовлетворяет условию парковки, которое предварительно задается; и
когда оценивается или обнаруживается то, что первое место для парковки не будет удовлетворять условию парковки, или второе место для парковки, отличное от первого места для парковки, будет удовлетворять условию парковки, отображать наличие первого места для парковки посредством второй формы для отображения, отличающейся от первой формы для отображения, на дисплее.
2. Способ по п. 1, в котором первое время от момента, когда первое место для парковки отображается во второй форме для отображения, до момента, когда первое место для парковки становится неотображаемым, задается большим по мере того, как скорость рассматриваемого транспортного средства увеличивается.
3. Способ по п. 1, в котором период первого времени от момента, когда первое место для парковки отображается во второй форме для отображения, до момента, когда первое место для парковки становится неотображаемым, задается таким образом, что первое время, заданное, когда первое место для парковки и второе место для парковки являются смежными друг с другом, превышает первое время, заданное, когда первое место для парковки и второе место для парковки не являются смежными друг с другом.
4. Способ по п. 1, в котором устройство управления выполнено с возможностью, когда оценивается то, что второе место для парковки, отличное от первого места для парковки, будет удовлетворять условию парковки, отображать второе место для парковки в третьей форме для отображения на дисплее и затем отображать второе место для парковки в четвертой форме для отображения на дисплее.
5. Способ по п. 1, в котором второе время от момента, когда второе место для парковки отображается в третьей форме для отображения, до момента, когда второе место для парковки отображается в четвертой форме для отображения, задается в соответствии со скоростью рассматриваемого транспортного средства.
6. Способ по п. 4 или 5, в котором период второго времени от момента, когда второе место для парковки отображается в третьей форме для отображения, до момента, когда второе место для парковки отображается в четвертой форме для отображения, задается таким образом, что второе время, заданное, когда второе место для парковки является смежным с другим местом для парковки, на котором возможна парковка, превышает второе время, заданное, когда второе место для парковки не является смежным с другим местом для парковки, на котором возможна парковка.
7. Способ по п. 1, в котором устройство управления выполнено с возможностью:
обнаруживать доступные места для парковки, на которых возможна парковка;
обнаруживать рекомендованное место для парковки из доступных мест для парковки в качестве первого места для парковки, причем рекомендованное место для парковки удовлетворяет условию рекомендации по парковке, которое принадлежит условию парковки; и
отображать рекомендованное место для парковки в первой форме для отображения.
8. Способ по п. 7, в котором устройство управления выполнено с возможностью, когда первое место для парковки извлекается в качестве рекомендованного места для парковки в первый временной интервал в процессе извлечения рекомендованного места для парковки, извлекать второе место для парковки, которое не является смежным с первым местом для парковки, в качестве рекомендованного места для парковки во второй временной интервал после первого временного интервала.
9. Способ по п. 1, в котором:
устройство помощи при парковке дополнительно содержит устройство выдачи уведомлений, и
устройство выдачи уведомлений выполнено с возможностью:
когда первое место для парковки отображается в первой форме для отображения, уведомлять в отношении этого в первом режиме уведомления; и
когда первое место для парковки отображается во второй форме для отображения, уведомлять в отношении этого во втором режиме уведомления, отличающемся от первого режима уведомления.
10. Способ по п. 5, в котором:
устройство помощи при парковке дополнительно содержит устройство выдачи уведомлений, и
устройство выдачи уведомлений выполнено с возможностью:
когда второе место для парковки отображается в третьей форме для отображения, уведомлять в отношении этого в третьем режиме уведомления; и
когда второе место для парковки отображается в четвертой форме для отображения, уведомлять в отношении этого в четвертом режиме уведомления, отличающемся от третьего режима уведомления.
11. Способ по п. 1, в котором устройство управления выполнено с возможностью, когда период времени между временным интервалом, в который первое место для парковки удовлетворяет условию парковки, и временным интервалом, в который второе место для парковки удовлетворяет условию парковки, не превышает предварительно определенный период времени, запрещать переключение формы для отображения первого места для парковки с первой формы для отображения на вторую форму для отображения и продолжать отображать первое место для парковки в первой форме для отображения, даже когда оценивается то, что второе место для парковки, отличное от первого места для парковки, будет удовлетворять условию парковки.
12. Способ отображения информации помощи при парковке, причем способ используется в устройстве помощи при парковке, содержащем дисплей и устройство управления,
причем устройство управления выполнено с возможностью:
отображать первое место для парковки в первой форме для отображения на дисплее, причем первое место для парковки удовлетворяет условию парковки, которое предварительно задается; и
когда оценивается или обнаруживается то, что первое место для парковки не будет удовлетворять условию парковки, и второе место для парковки, отличное от первого места для парковки, будет удовлетворять условию парковки, отображать наличие первого места для парковки посредством второй формы для отображения, отличающейся от первой формы для отображения, на дисплее.
13. Устройство помощи при парковке, содержащее дисплей и устройство управления,
причем устройство управления выполнено с возможностью:
отображать первое место для парковки в первой форме для отображения на дисплее, причем первое место для парковки удовлетворяет условию парковки, которое предварительно задается; и
когда оценивается или обнаруживается то, что первое место для парковки не будет удовлетворять условию парковки, или второе место для парковки, отличное от первого места для парковки, будет удовлетворять условию парковки, отображать наличие первого места для парковки посредством второй формы для отображения, отличающейся от первой формы для отображения, на дисплее.
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ДИСПЛЕЯ ПАРКОВОЧНОГО УСТРОЙСТВА И СПОСОБ ОТОБРАЖЕНИЯ | 2008 |
|
RU2468944C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ПОМОЩИ ВОДИТЕЛЮ ТРАНСПОРТНОГО СРЕДСТВА ПРИ ПАРКОВКЕ | 2009 |
|
RU2529078C2 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| RU 2011102582 A, 27.07.2012. | |||

