Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу помощи при парковке и к устройству помощи при парковке.
Уровень техники
[0002] К настоящему времени известно устройство распознавания мест для парковки, как указано ниже. Устройство распознавания мест для парковки обнаруживает места, на которые может пространственно въезжать рассматриваемое транспортное средство, приоритезирует места на основе предварительно зарегистрированной уникальной информации рассматриваемого транспортного средства и/или водителя и выводит возможный вариант места для парковки (патентный документ 1).
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1. JP2011-205191A
Сущность изобретения
Задачи, решаемые изобретением
[0004] В предшествующем уровне техники, возможный вариант места для парковки выводится на основе уровня приоритета, уникального для пользователя, независимо от присутствия или отсутствия препятствия на месте для парковки. Таким образом, к сожалению, соответствующее место для парковки не может представляться водителю и пассажирам в соответствии с препятствием. Это может быть проблематичным.
[0005] Проблема, которая должна разрешаться посредством настоящего изобретения, заключается в том, чтобы предоставлять способ помощи при парковке или устройство помощи при парковке, с помощью которых соответствующее доступное место для парковки может представляться водителю и пассажирам в соответствии с препятствием.
Средство решения задач
[0006] Настоящее изобретение разрешает вышеуказанную проблему посредством задания места для парковки, подходящего для парковки рассматриваемого транспортного средства, из указанных доступных мест для парковки в качестве рекомендованного доступного места для парковки в соответствии с состоянием движения рассматриваемого транспортного средства, отображения заданного рекомендованного доступного места для парковки на дисплее, обнаружения того, находится или нет рекомендованное доступное место для парковки в состоянии недоступности парковки вследствие присутствия препятствия, обнаружения того, отменяется или нет состояние недоступности парковки по мере того, как препятствие перемещается до того, как проходит предварительно определенное время, и когда состояние недоступности парковки отменяется до того, как проходит предварительно определенное время, поддержания формы для отображения рекомендованного доступного места для парковки на дисплее.
Преимущества изобретения
[0007] Настоящее изобретение имеет такое преимущество, что соответствующее доступное место для парковки может представляться водителю и пассажирам в соответствии с препятствием, поскольку когда рассматриваемое транспортное средство паркуется на рекомендованном доступном месте для парковки, форма для отображения рекомендованного доступного места для парковки на дисплее управляется в соответствии с состоянием препятствия, которое создает препятствие для операции парковки.
Краткое описание чертежей
[0008] Фиг. 1 является блок-схемой, иллюстрирующей пример системы помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 2 является блок-схемой последовательности операций способа, иллюстрирующей пример процедуры управления в системе помощи при парковке согласно первому варианту осуществления настоящего изобретения.
Фиг. 3 является видом, иллюстрирующим пример позиций, в которых размещаются бортовые камеры согласно варианту осуществления.
Фиг. 4A является первым видом для описания примера процесса помощи при парковке согласно варианту осуществления.
Фиг. 4B является вторым видом для описания примера процесса помощи при парковке согласно варианту осуществления.
Фиг. 4C является третьим видом для описания примера процесса помощи при парковке согласно варианту осуществления.
Фиг. 4D является четвертым видом для описания примера процесса помощи при парковке согласно варианту осуществления.
Фиг. 4E является видом для описания примера процесса помощи при парковке согласно варианту осуществления.
Фиг. 4F является видом для описания примера процесса помощи при парковке согласно варианту осуществления.
Фиг. 5 является графиком, иллюстрирующим взаимосвязь между скоростью транспортного средства (V (км)) и расстоянием до точки взгляда (Y (м)).
Фиг. 6 является набором видов, иллюстрирующих примеры шаблонов (A), (B) и (C) парковки, к которым применяется процесс помощи при парковке согласно варианту осуществления.
Фиг. 7A является первым видом для описания примера экрана отображения в процессе помощи при парковке согласно варианту осуществления.
Фиг. 7B является вторым видом для описания примера экрана отображения в процессе помощи при парковке согласно варианту осуществления.
Фиг. 7C является третьим видом для описания примера экрана отображения в процессе помощи при парковке согласно варианту осуществления.
Фиг. 7D является четвертым видом для описания примера экрана отображения в процессе помощи при парковке согласно варианту осуществления.
Фиг. 7E является видом для описания примера экрана отображения в процессе помощи при парковке согласно варианту осуществления.
Фиг. 8A является первым видом для описания примера процесса помощи при парковке согласно варианту осуществления.
Фиг. 8B является вторым видом для описания примера процесса помощи при парковке согласно варианту осуществления.
Фиг. 8C является третьим видом для описания примера процесса помощи при парковке согласно варианту осуществления.
Фиг. 8D является четвертым видом для описания примера процесса помощи при парковке согласно варианту осуществления.
Фиг. 9 является блок-схемой последовательности операций способа, иллюстрирующей пример процедуры управления в системе помощи при парковке согласно первому варианту осуществления.
Фиг. 10 является графиком, иллюстрирующим взаимосвязь между размером препятствия (C) и временем (T) ожидания.
Фиг. 11 является видом для описания примера процесса помощи при парковке согласно второму варианту осуществления настоящего изобретения.
Фиг. 12 является блок-схемой последовательности операций способа, иллюстрирующей пример процедуры управления в системе помощи при парковке согласно второму варианту осуществления.
Вариант(ы) осуществления изобретения
[0009] Далее описываются варианты осуществления настоящего изобретения со ссылкой на чертежи.
[0010] В настоящем варианте осуществления, настоящее изобретение описывается со ссылкой на пример, в котором устройство помощи при парковке согласно настоящему изобретению применяется к системе помощи при парковке, оснащенной в транспортном средстве. Устройство помощи при парковке также может применяться к портативному терминальному устройству (такому оборудованию, как смартфон и PDA), допускающему обмен информацией с бортовыми устройствами. Способ отображения информации помощи при парковке согласно настоящему изобретению может использоваться в устройстве помощи при парковке. Информация помощи при парковке, связанная с изобретением способа отображения, в частности, отображается с использованием дисплея 21.
[0011] Фиг. 1 является блок-схемой системы 1000 помощи при парковке, имеющей устройство 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения. Система 1000 помощи при парковке согласно настоящему варианту осуществления помогает при операции перемещения (парковки) рассматриваемого транспортного средства на месте для парковки. Система 1000 помощи при парковке согласно настоящему варианту осуществления включает в себя камеры 1a-1d, устройство 2 обработки изображений, устройство 3 измерения дальности, устройство 100 помощи при парковке, контроллер 30 транспортного средства, приводную систему 40, датчик 50 угла поворота при рулении и датчик 60 скорости транспортного средства. Устройство 100 помощи при парковке согласно настоящему варианту осуществления включает в себя устройство 10 управления и устройство 20 вывода. Устройство 20 вывода включает в себя дисплей 21, динамик 22 и лампу 23. Эти компоненты соединяются друг с другом через контроллерную сеть (CAN) или другую бортовую LAN, чтобы взаимно обмениваться информацией.
[0012] Устройство 10 управления устройства 100 помощи при парковке согласно настоящему варианту осуществления представляет собой конкретный компьютер, содержащий ROM 12, которое сохраняет программу помощи при парковке, CPU в качестве функциональной схемы, которая выполняет программу, сохраненную в ROM 12, так что он служит в качестве устройства 100 помощи при парковке согласно настоящему варианту осуществления, и RAM 13, которое служит в качестве доступного устройства хранения данных.
[0013] Программа помощи при парковке согласно настоящему варианту осуществления представляет собой программу для выполнения процедуры управления для представления доступных мест для парковки, на которых возможна парковка, на дисплее 21 и помощи при операции парковки рассматриваемого транспортного средстве на месте для парковки, заданном пользователем. Устройство 100 помощи при парковке согласно настоящему варианту осуществления может применяться к автоматизированной парковке, при которой все из руления, акселератора и тормоза автоматически работает, чтобы за счет этого автоматически парковать транспортное средство, а также может применяться к полуавтоматизированной парковке, при которой, по меньшей мере, одна операция из руления, нажатия педали акселератора и тормоза выполняется вручную, а другие операции выполняются автоматически для парковки. Помимо этого или альтернативно, устройство 100 помощи при парковке может применяться к функции помощи при парковке, с помощью которой намеченный путь на место для парковки представляется пользователю, и пользователь выполняет руление, нажимает педаль акселератора и тормоза, чтобы парковать транспортное средство.
[0014] Устройство 10 управления устройства 100 помощи при парковке согласно настоящему варианту осуществления имеет функции выполнения процесса получения информации, процесса обнаружения доступных мест для парковки, процесса обнаружения рекомендованных доступных мест для парковки и процесса управления отображением. Каждый из вышеуказанных процессов выполняется посредством взаимодействия программного обеспечения для реализации процесса и вышеописанных аппаратных средств.
[0015] Фиг. 2 является блок-схемой последовательности операций способа, иллюстрирующей процедуру управления процесса помощи при парковке, выполняемого посредством системы 1000 помощи при парковке согласно настоящему варианту осуществления. Триггер для начала процесса помощи при парковке не ограничен конкретным образом, и процесс помощи при парковке может быть инициирован посредством операции пускового переключателя устройства 100 помощи при парковке.
[0016] Устройство 100 помощи при парковке согласно настоящему варианту осуществления имеет функцию для автоматического перемещения рассматриваемого транспортного средства на доступное место для парковки. В этом процессе согласно настоящему варианту осуществления, используется переключатель без фиксации положения, к примеру, переключатель автоблокировки. В устройстве 100 помощи при парковке, автоматизированное вождение рассматриваемого транспортного средства выполняется, когда переключатель автоблокировки нажимается, и автоматизированное вождение рассматриваемого транспортного средства приостанавливается, когда нажатие переключателя автоблокировки прекращается.
[0017] В частности, на этапе 101, устройство 10 управления устройства 100 помощи при парковке согласно настоящему варианту осуществления получает изображения, захваченные посредством камер 1a-1d, присоединяемых к нескольким сегментам рассматриваемого транспортного средства. Камеры 1a-1d захватывают изображения граничных линий доступных мест для парковки вокруг рассматриваемого транспортного средства и объектов, присутствующих вокруг доступных мест для парковки. Камеры 1a-1d могут представлять собой CCD-камеры, камеры для съемки в инфракрасном диапазоне или другие соответствующие устройства формирования изображений. Устройство 3 измерения дальности может предоставляться в позиции, идентичной позиции любой из камер 1a-1d, или также может предоставляться в другой позиции. Устройство 3 измерения дальности может представлять собой радарное устройство, такое как радар миллиметрового диапазона, лазерный радар и ультразвуковой радар или сонар. Устройство 3 измерения дальности обнаруживает присутствие или отсутствие объектов, позиции объектов и расстояния до объектов на основе принимаемого сигнала радарного устройства. Такие объекты соответствуют препятствием, пешеходам и другим транспортным средствам вокруг транспортного средства. Принимаемый сигнал используется для того, чтобы определять то, представляет собой место для парковки или нет незанятое место (паркуется или нет транспортное средство на месте для парковки). Препятствия могут обнаруживаться с использованием стереотехнологии движения посредством камер 1a-1d.
[0018] Фиг. 3 является видом, иллюстрирующим примерную компоновку камер 1a-1d, расположенных на рассматриваемом транспортном средстве. В примере, проиллюстрированном на фиг. 3, камера 1a располагается на части решетки радиатора рассматриваемого транспортного средства, камера 1d располагается около заднего бампера, и камеры 1b и 1c располагаются в нижних частях правого и левого боковых зеркал. Камеры 1a-1d могут представлять собой камеру, имеющую широкоугольную линзу с широким углом обзора.
[0019] На этапе 101, устройство 10 управления также получает сигналы измерения дальности из устройства 3 измерения дальности, которое может представлять собой множество модулей, присоединенных к нескольким сегментам рассматриваемого транспортного средства.
[0020] На этапе 102, устройство 10 управления устройства 100 помощи при парковке управляет устройством 2 обработки изображений таким образом, чтобы формировать снятое сверху изображение. На основе полученного множества захваченных изображений, устройство 2 обработки изображений формирует снятое сверху изображение, в котором окружающее состояние, включающее в себя рассматриваемое транспортное средство и место для парковки для парковки рассматриваемого транспортного средства, просматривается из виртуальной точки P обзора (см. фиг. 3) выше рассматриваемого транспортного средства. Обработка изображений, выполняемая посредством устройства 2 обработки изображений, может проводиться, например, с использованием способа, раскрытого в работе "Development of Around View System, Proceedings of Society of JSAE Annual Congress, 116-07 (октябрь 2007 года), стр. 17-22, SUZUKI Masayasu, CHINOMI Satoshi, TAKANO Teruhisa". Примеры сформированного снятого сверху изображения 21A проиллюстрированы на фиг. 7A и 7B, которые описываются ниже. Эти чертежи иллюстрируют пример отображения, который одновременно отображает снятое сверху изображение 21A (вид сверху) вокруг рассматриваемого транспортного средства и изображение 21B для мониторинга (нормальный вид) вокруг рассматриваемого транспортного средства.
[0021] На этапе 103, доступные места Me для парковки обнаруживаются. Устройство 10 управления обнаруживает доступные места Me для парковки на основе изображений, захваченных посредством камер 1a-1d, и/или данных, принимаемых посредством устройства 3 измерения дальности. Устройство 10 управления сохраняет "условие возможности парковки" для извлечения доступных мест Me для парковки. "Условие возможности парковки" задается с точки зрения извлечения доступного места для парковки, на котором возможна парковка. "Условие возможности парковки" предпочтительно задается с точки зрения расстояния от рассматриваемого транспортного средства, с точки зрения в отношении того, паркуются или нет другие транспортные средства, и с точки зрения присутствия или отсутствия препятствий. На основе "условия возможности парковки", устройство 10 управления обнаруживает доступные места Me для парковки, на которых может парковаться рассматриваемое транспортное средство. Доступные места Me для парковки представляют собой доступные места для парковки, на которых может парковаться рассматриваемое транспортное средство. Устройство 10 управления указывает доступные места Me для парковки на основе изображений, захваченных посредством камер 1a-1d, и/или данных, принимаемых посредством устройства 3 измерения дальности. В вышеприведенном описании, изображения доступных мест для парковки захватываются посредством бортовых камер, и доступные места Me для парковки обнаруживаются из захваченных изображений, но информация может получаться из внешнего сервера, и доступные места для парковки могут указываться из полученной информации.
[0022] Ниже описывается способ обнаружения доступных мест Me для парковки. Устройство 10 управления определяет то, движется или нет рассматриваемое транспортное средство в зоне, которая включает в себя места для парковки (такая зона в дальнейшем также упоминаться как "зона парковки"), на основе скорости транспортного средства или позиционной информации из навигационной системы (не проиллюстрирована). Например, когда скорость транспортного средства для рассматриваемого транспортного средства составляет предварительно определенное пороговое значение скорости транспортного средства или меньше, и это состояние продолжается в течение предварительно определенного времени или больше, устройство 10 управления определяет то, что рассматриваемое транспортное средство движется в зоне парковки. Помимо этого или альтернативно, когда обнаруженная позиционная информация имеет атрибут, который представляет зону парковки, к примеру, зону, включающую в себя места для парковки шоссе, например, устройство 10 управления определяет то, что рассматриваемое транспортное средство движется в зоне парковки. В настоящем варианте осуществления, может выполняться определение в отношении того, представляет собой обнаруженная зона или нет зону, включающую в себя места для парковки, через связь с внешней средой относительно транспортного средства, т.е. через так называемую связь между транспортным средством и дорожной инфраструктурой или связь между транспортными средствами.
[0023] Когда выполняется определение в отношении того, что рассматриваемое транспортное средство движется в зоне парковки, устройство 10 управления обнаруживает сигнальные линии дорожной разметки на основе захваченных изображений, полученных для формирования снятого сверху изображения. Сигнальные линии дорожной разметки представляют граничные линии, которые задают рамки (области) мест для парковки. Устройство 10 управления выполняет обнаружение краев для захваченных изображений, чтобы вычислять яркостную разность (контрастность). Устройство 10 управления указывает пиксельную линию, имеющую яркостную разность в предварительно определенное значение или больше относительно снятого сверху изображения, и вычисляет ширину и длину линии. Устройство 10 управления также обнаруживает то, имеются или нет возможные варианты линий парковочных рамок, которые имеют более высокую вероятность того, что они представляют собой линии парковочных рамок, чем указываемая линия вокруг участка, в котором указывается линия. Например, когда линия, имеющая большую яркостную разность, заново указывается, новая указываемая линия обнаруживается в качестве линии, имеющей более высокую вероятность того, что она представляет собой линию парковочной рамки. В настоящем варианте осуществления, линии рамок, представляющие места для парковки, не обязательно являются белыми, и также могут использоваться другие цвета, к примеру, красный.
[0024] ROM 12 устройства 10 управления предварительно сохраняет информацию относительно шаблонов парковочных рамок. Шаблоны парковочных рамок представляют различные формы мест для парковки. Например, в местах для парковки части (A) по фиг. 6, которая описывается ниже, шаблон парковочной рамки состоит из трех сторон из числа сторон, которые образуют прямоугольник. Примеры шаблонов парковочных рамок включают в себя шаблоны для параллельной парковки, как проиллюстрировано в части (B) по фиг. 6, которая описывается ниже, и шаблоны для парковки под непрямым углом, как проиллюстрировано в части (C) по фиг. 6, которая также описывается ниже.
[0025] Устройство 10 управления указывает линии, расположенные на поверхности дороги, из обзорного изображения в качестве возможных вариантов линий парковочных рамок с использованием известной технологии обработки изображений, такой как сопоставление с шаблоном. Когда указанные возможные варианты линий парковочных рамок удовлетворяют всем следующим трем условиям (1)-(3), устройство 10 управления указывает указанные линии парковочных рамок в качестве линий парковочных рамок, которые представляют места для парковки. Следующие условия являются просто примерами.
(1) Линии, извлеченные в качестве возможных вариантов линий парковочных рамок, не включают в себя линию, имеющую длину, равную или большую первого порогового значения длины линии, которое предварительно задается (например, длину, соответствующую фактическому расстоянию 15 (м)).
(2) Из линий, извлеченных в качестве возможных вариантов линий парковочных рамок, набор из смежных двух линий в первом диапазоне разнесения между линиями, который предварительно задается (например, длина, соответствующая фактическому расстоянию 3-5 (м)), не включает в себя набор линий, имеющих длину, равную или меньшую второго порогового значения длины линии, которое предварительно задается (например, длину, соответствующую фактическому расстоянию 7 (м)).
(3) Из линий, извлеченных в качестве возможных вариантов линий парковочных рамок, набор из смежных двух линий во втором диапазоне разнесения между линиями, который предварительно задается (например, длина, соответствующая фактическому расстоянию 2,5-5 (м)), не включает в себя набор линий, имеющих длину, равную или меньшую третьего порогового значения длины линии, которое предварительно задается (например, длину, соответствующую фактическому расстоянию 15 (м)).
[0026] В случае указания мест для парковки, которые удовлетворяют вышеприведенным трем условиям, устройство 10 управления определяет то, присутствуют или нет препятствия в указанных местах для парковки, с использованием обнаруживаемых данных из устройства 3 измерения дальности. Помимо этого, устройство 10 управления определяет то, представляют собой указанные места для парковки или нет места для парковки, на которых возможна парковка посредством автоматизированного вождения, на основе намеченного пути движения при автоматизированном вождении. Например, места для парковки, для которых не может обеспечиваться намеченный путь движения при автоматизированном вождении, к примеру, места для парковки, обращенные к стене, не соответствуют местам для парковки, на которых возможна парковка посредством автоматизированного вождения. Затем устройство 10 управления обнаруживает места для парковки, из числа указанных мест для парковки, в которых не присутствуют препятствия, и в которых парковка возможна посредством автоматизированного вождения, в качестве доступных мест Me для парковки. Таким образом, устройство 10 управления обнаруживает доступные места Me для парковки. В вышеприведенном описании, устройство 10 управления обнаруживает доступные места для парковки при одновременном обнаружении линий парковочных рамок, но линии парковочных рамок необязательно могут обнаруживаться, чтобы обнаруживать доступные места для парковки. Помимо этого или альтернативно, устройство 10 управления может обнаруживать незанятые места, имеющие определенный диапазон, и обнаруживать незанятые места в качестве доступных мест для парковки, а также может обнаруживать доступные места для парковки с использованием информации относительно предыдущих результатов парковки. Помимо этого или альтернативно, когда места для парковки удовлетворяют предварительно определенному условию, устройство 10 управления может обнаруживать места для парковки, удовлетворяющие предварительно определенному условию, в качестве доступных мест для парковки.
[0027] Фиг. 4A является первым видом для описания примера процесса помощи при парковке согласно настоящему варианту осуществления. Предполагается, что на фиг. 4A, позиция движения рассматриваемого транспортного средства представляет собой P1, и скорость транспортного средства представляет собой V1. Стрелки L представляют намеченный путь движения, когда транспортное средство паркуется посредством автоматизированного вождения. Пунктирные круги представляют доступные места Me для парковки, обнаруженные в позиции P1.
[0028] На фиг. 4A и на фиг. 4B-4D, которые описываются ниже, перемещение рассматриваемого транспортного средства представляется во временной последовательности, и позиция рассматриваемого транспортного средства перемещается из фиг. 4A в порядке фиг. 4B, фиг. 4C и фиг. 4D. Фиг. 4E, который описывается ниже, не является непрерывным с фиг. 4A-4D во временной последовательности.
[0029] Намеченный путь L движения представляет собой намеченный путь, по которому рассматриваемое транспортное средство перемещается из текущей позиции G1 в промежуточную позицию Mw, расположенную впереди рассматриваемого транспортного средства, и перемещается задним ходом, чтобы завершать маневр при парковке на месте PL для парковки. Такой маневр при парковке включает в себя один или более поворотов для парковки. На фиг. 4A, препятствие M1 присутствует на месте PR8 для парковки, и устройство 10 управления в силу этого не указывает место PR8 для парковки в качестве доступного места Me для парковки. Относительно места PL8 для парковки, намеченный путь движения не может обеспечиваться при автоматизированном вождении, поскольку стена Wa создает препятствие намеченному пути движения (соответствующему пунктирным стрелкам на фиг. 4A), и место PL8 для парковки в силу этого не представляет собой место для парковки, подходящее для автоматизированного вождения. Соответственно, устройство 10 управления не обнаруживает место PL8 для парковки в качестве доступного места Me для парковки. Другие транспортные средства паркуются в местах PR1, PR4, PR6 и PL3 для парковки, и устройство 10 управления в силу этого не обнаруживает их в качестве доступных мест Me для парковки. Устройство 10 управления обнаруживает места PL1, PL2, PL4-PL7, PR2, PR3, PR5 и PR7 для парковки в качестве доступных мест Me для парковки.
[0030] Устройство 10 управления задает диапазон, который включает в себя места PL2-PL5 и PR2-PR5 для парковки, из мест для парковки, включенных в изображения, захваченные в позиции P1 рассматриваемого транспортного средства, в качестве диапазона обнаружения для доступных мест Me для парковки. Диапазон обнаружения для доступных мест Me для парковки во время движения транспортного средства не ограничен диапазоном мест PL2-PL5 и PR2-PR5 для парковки и также может представлять собой, например, диапазон мест PL1-PL8 и PR1-PR8 для парковки.
[0031] Снова ссылаясь на фиг. 2, на этапе 104, рекомендованное доступное место Mr для парковки обнаруживается. Рекомендованное доступное место Mr для парковки представляет собой доступное место для парковки, подходящее для парковки рассматриваемого транспортного средства. Устройство 10 управления обнаруживает рекомендованное доступное место Mr для парковки в соответствии с состоянием движения рассматриваемого транспортного средства из обнаруженного множества доступных мест для парковки. Устройство 10 управления сохраняет "условие рекомендации по парковке" для извлечения рекомендованного доступного места Mr для парковки. "Условие рекомендации по парковке" задается с точки зрения извлечения места для парковки, для которого связанные с парковкой затраты, требуемые для парковки, являются низкими. "Условие рекомендации по парковке" предпочтительно задается с точки зрения времени, требуемого для парковки (требуемого времени для парковки). На основе "условия рекомендации по парковке", устройство 10 управления извлекает рекомендованное доступного место Mr для парковки, для которого связанные с парковкой затраты являются низкими, из числа доступных мест для парковки.
[0032] Ниже описывается способ обнаружения рекомендованного доступного места Mr для парковки. Устройство 10 управления оценивает затраты, требуемые для парковки на каждом доступном месте для парковки. Намеченный путь движения, используемый для оценки затрат, представляет собой намеченный путь от начальной позиции, в которой начинается процесс помощи при парковке (автоматизированное вождение), до позиции каждого доступного места Me для парковки. Устройство 10 управления вычисляет намеченный путь движения при парковке рассматриваемого транспортного средства на каждом доступном месте Me для парковки. Устройство 10 управления задает начальную позицию для каждого доступного места Me для парковки. Устройство 10 управления вычисляет намеченный путь движения от начальной позиции до каждого доступного места Me для парковки. Число намеченных путей движения для автоматизированного вождения не ограничено одним, и устройство 10 управления может вычислять множество намеченных путей движения в соответствии с окружающими ситуациями.
[0033] Связанные с парковкой затраты для парковки на каждом доступном месте Me для парковки отражают нагрузку, к примеру, требуемое время для парковки, которое требуется для перемещения рассматриваемого транспортного средства на место для парковки посредством автоматизированного вождения.
[0034] Связанные с парковкой затраты отражают время движения для парковки рассматриваемого транспортного средства на доступном месте Me для парковки посредством автоматизированного вождения и получаются в соответствии с требуемым временем для парковки. Требуемое время для парковки представляет собой время при движении посредством автоматизированного вождения вдоль намеченного пути движения, вычисленного для каждого доступного места Me для парковки. Связанные с парковкой затраты могут получаться в соответствии с простотой въезда на доступное место Me для парковки. Простота въезда на доступное место Me для парковки определяется в соответствии с проезжаемым расстоянием, числом операций (числом поворотов для парковки), максимальным углом поворота при рулении, скоростью транспортного средства и т.д. Например, когда проезжаемое расстояние является большим, когда число поворотов для парковки является большим, когда максимальный угол поворота при рулении является большим, и/или когда скорость транспортного средства является высокой, непросто въезжать на доступное место для парковки Me, и связанные с парковкой затраты являются высокими. Другими словами, простота въезда оценивается для каждого доступного места для парковки, и при условии, что доступное место для парковки, въезд на которое является самым простым, представляет собой доступное место для парковки, для которого связанные с парковкой затраты являются наименьшими, доступное место для парковки может задаваться в качестве рекомендованного доступного места для парковки. Факторы связанных с парковкой затрат могут включать в себя не только требуемое время для парковки, но также и другие факторы, такие как достоверность парковки при автоматизированном вождении. Связанные с парковкой затраты не обязательно могут представлять собой индекс, эквивалентный требуемому времени для парковки, и также могут вычисляться из относительной взаимосвязи с числом поворотов для парковки на намеченном пути движения, длиной намеченного пути движения или максимальным углом поворота при рулении. Связанные с парковкой затраты могут вычисляться на основе каждого индекса, такого как требуемое время для парковки, простота въезда на доступное место Me для парковки и достоверность парковке, либо на основе комбинации двух или более индексов или на основе комбинации всех индексов.
[0035] В нижеприведенном описании настоящего варианта осуществления, связанные с парковкой затраты вычисляются на основе требуемого времени для парковки. Намеченный путь движения отличается для каждого доступного места Me для парковки в соответствии с числом поворотов для парковки, проезжаемым расстоянием, максимальным углом поворота при рулении и т.д. Следовательно, когда транспортное средство движется вдоль намеченного пути движения посредством автоматизированного вождения, требуемое время для парковки отличается для каждого намеченного пути движения. Например, требуемое время для парковки является меньшим по мере того, как число поворотов для парковки меньше, по мере того, как расстояние намеченного пути движения меньше, либо по мере того, как максимальный угол поворота при рулении меньше. Как проиллюстрировано на фиг. 4A, при допущении относительно парковки на доступном месте PL6 или PL7 для парковки, расстояние от окрестности места PL7 для парковки до стены Wa меньше расстояния от окрестности места PL6 для парковки в до стены Wa. Число поворотов для парковки при парковке на месте PL7 для парковки в силу этого превышает число поворотов для парковки при парковке на месте PL6 для парковки и требуемое время для парковки на месте PL7 для парковки превышает требуемое время для парковки на месте PL6 для парковки (связанные с парковкой затраты являются более высокими в первом случае).
[0036] Устройство 10 управления затем вычисляет расстояние до точки взгляда на основе скорости транспортного средства для рассматриваемого транспортного средства. Расстояние до точки взгляда означает расстояние от позиции рассматриваемого транспортного средства до позиции, на которую смотрит водитель рассматриваемого транспортного средства. В общем, чем выше скорость транспортного средства, тем дальше смотрит водитель, и чем ниже скорость транспортного средства, тем ближе смотрит водитель. С точки зрения рекомендации доступного места для парковки в соответствии с точкой наблюдения водителя, устройство 10 управления задает большее расстояние до точки взгляда по мере того, как скорость транспортного средства для рассматриваемого транспортного средства является более высокой, и задает меньшее расстояние до точки взгляда по мере того, как скорость транспортного средства для рассматриваемого транспортного средства является более низкой. Это обеспечивает возможность выполнения помощи при парковке на доступном месте для парковки в соответствии с намерением водителя. Расстояние до точки взгляда не обязательно должно быть линейным и также может задаваться вдоль кривой. Когда расстояние до точки взгляда задается вдоль кривой, кривизна кривой может быть ассоциирована с углом поворота при рулении.
[0037] Фиг. 5 является графиком, иллюстрирующим взаимосвязь между скоростью транспортного средства (V (км/с)) и расстоянием до точки взгляда (Y (м)). Сплошная линия представляет характеристику, когда скорость транспортного средства увеличивается, тогда как пунктирная линия представляет характеристику, когда скорость транспортного средства уменьшается. Как проиллюстрировано на фиг. 5, когда скорость транспортного средства составляет Va или ниже, расстояние до точки взгляда составляет Ya. Когда скорость транспортного средства увеличивается от Va до Vc, расстояние до точки взгляда поддерживается как Ya. Затем по мере того, как возрастает скорость транспортного средства из состояния Vc, расстояние до точки взгляда увеличивается пропорционально скорости транспортного средства в пределах диапазона Vc или выше и Vd или ниже скорости транспортного средства. Когда скорость транспортного средства составляет Vd или выше, расстояние до точки взгляда поддерживается как Yb. С другой стороны, когда скорость транспортного средства понижается из состояния Vd, расстояние до точки взгляда поддерживается как Yb до тех пор, пока скорость транспортного средства не возвращается к Vb от Vd. Расстояние до точки взгляда уменьшается пропорционально скорости транспортного средства в пределах диапазона Va или выше и Vc или ниже скорости транспортного средства. Таким образом, взаимосвязь между скоростью транспортного средства и расстоянием до точки взгляда имеет гистерезисную характеристику между направлением увеличения и направлением уменьшения скорости транспортного средства.
[0038] ROM 12 устройства 10 управления сохраняет взаимосвязь между скоростью транспортного средства и расстоянием до точки взгляда в качестве карты. При получении информации относительно скорости транспортного средства из датчика 60 скорости транспортного средства, устройство 10 управления обращается к карте, чтобы вычислять расстояние до точки взгляда, соответствующее скорости транспортного средства.
[0039] Фиг. 4B иллюстрирует состояние, в котором рассматриваемое транспортное средство перемещается вперед из позиции P1, проиллюстрированной на фиг. 4A, в позицию P2. Скорость рассматриваемого транспортного средства в позиции P2 составляет V2 (<V1). Устройство 10 управления обращается к карте, чтобы вычислять расстояние до точки взгляда, соответствующее скорости V2 транспортного средства. Устройство 10 управления указывает точку G2, которая отстоит от позиции P2 на расстояние до точки взгляда, в качестве точки (G2) взгляда. Рассматриваемое транспортное средство находится в состоянии выбора места для парковки с пониженной скоростью V2 транспортного средства (<V1). Расстояние между точкой G2 взгляда и рассматриваемым транспортным средством меньше расстояния между точкой G1 взгляда, проиллюстрированной на фиг. 4A, и рассматриваемым транспортным средством, поскольку скорость транспортного средства понижается.
[0040] В состоянии, проиллюстрированном на фиг. 4B, устройство 10 управления обнаруживает рекомендованное доступное место для парковки из числа доступных мест PL2, PL4, PL5, PR2, PR3 и PR5 для парковки около точки G2 взгляда. Устройство 10 управления обнаруживает рекомендованное доступное место для парковки на основе связанных с парковкой затрат для каждого из мест PL2, PL4, PL5, PR2, PR3 и PR5 для парковки.
[0041] Устройство 10 управления затем назначает номера для идентификации для доступных мест Me для парковки около точки G2 взгляда. Например, идентификационные номера предоставляются в порядке близости к точке G2 взгляда. Устройство 10 управления вычисляет связанные с парковкой затраты для парковки на каждом доступном месте Me для парковки (связанные с парковкой затраты представляют индекс простоты въезда на каждое доступное место Me для парковки). Устройство 10 управления может считывать связанные с парковкой затраты для парковки, которые ранее вычислены.
[0042] Чтобы оценивать связанные с парковкой затраты, устройство 10 управления вычисляет требуемое время для парковки на каждом доступном месте Me для парковки. В примере по фиг. 4B, устройство 10 управления вычисляет связанные с парковкой затраты (требуемое время для парковки) для каждого из доступных мест PL2, PL4, PL5, PR2, PR3 и PR5 для парковки и сохраняет связанные с парковкой затраты таким образом, что они ассоциированы с каждым идентификационным номером.
[0043] Устройство 10 управления сравнивает требуемое время для парковки на каждом доступном месте Me для парковки с предварительно определенным требуемым пороговым значением времени. Требуемое пороговое значение времени является значением, которое предварительно задается, и является верхним пределом требуемого времени при парковке посредством автоматизированного вождения. Когда требуемое время для парковки на доступном месте Me для парковки превышает требуемое пороговое значение времени, устройство 10 управления не обнаруживает доступное место Me для парковки в качестве рекомендованного доступного места Mr для парковки.
[0044] После обнаружения доступных мест Me для парковки, для которых требуемое время для парковки меньше требуемого порогового значения времени, устройство 10 управления задает доступное место Me для парковки, которое является ближайшим к точке взгляда из обнаруженных доступных мест Me для парковки, в качестве рекомендованного доступного места Mr для парковки. В примере по фиг. 4B, требуемое время для парковки на месте PL4 для парковки меньше требуемого порогового значения времени, и место PL4 для парковки находится ближе всего к точке взгляда. Устройство 10 управления в силу этого задает место PL4 для парковки в качестве рекомендованного доступного места Mr для парковки. В вышеописанном варианте осуществления, из доступных мест Me для парковки, для которых требуемое время для парковки меньше требуемого порогового значения времени, место для парковки с кратчайшим расстоянием до точки взгляда задается в качестве рекомендованного доступного места Mr для парковки, но другой способ может использоваться для того, чтобы задавать рекомендованное доступное место Mr для парковки. Например, из доступных мест Me для парковки, для которых требуемое время для парковки меньше требуемого порогового значения времени, доступное место Me для парковки, для которого требуемое время для парковки является наименьшим, может задаваться в качестве рекомендованного доступного места Mr для парковки. В другом варианте осуществления, например, предполагается, что при обнаружении рекомендованного доступного места Mr для парковки, доступные места Me для парковки могут задаваться в качестве рекомендованного доступного места Mr для парковки, когда расстояние до точки взгляда от точки взгляда до доступного места Me для парковки находится в пределах предварительно определенного расстояния. Из числа таких доступных мест Me для парковки, место для парковки, для которого требуемое время для парковки является наименьшим, может обнаруживаться в качестве рекомендованного доступного места Mr для парковки.
[0045] Как описано выше, в настоящем варианте осуществления, расстояние до точки взгляда вычисляется на основе скорости транспортного средства, и позиция, отделенная от текущей позиции рассматриваемого транспортного средства на расстояние до точки взгляда, указывается в качестве точки взгляда. Дополнительно, из доступных мест для парковки, доступное место для парковки, ближайшее к точке взгляда, задается в качестве рекомендованного доступного места Mr для парковки. Таким образом, расстояние до точки взгляда на основе скорости транспортного средства вычисляется, чтобы указывать точку взгляда пользователя, за счет этого указывая рекомендованное доступное место для парковки с учетом намерения пользователя (операции вождения пользователем). В настоящем варианте осуществления, связанные с парковкой затраты вычисляются для каждого доступного места для парковки, и из доступных мест для парковки, доступное место для парковки, для которого связанные с парковкой затраты являются низкими, задается в качестве рекомендованного доступного места Mr для парковки. Таким образом, оценка затрат используется для того, чтобы определять состояние транспортного средства при автоматизированном вождении до того, как выполняется автоматизированное вождение, и рекомендованное доступное место для парковки указывается. Через эту операцию, в настоящем варианте осуществления, доступное место для парковки, подходящее для парковки рассматриваемого транспортного средства, задается в качестве рекомендованного доступного места для парковки в соответствии с состоянием движения рассматриваемого транспортного средства.
[0046] Устройство 10 управления выполняет процесс обнаружения для рекомендованного доступного места Mr для парковки с предварительно определенным периодом. Как проиллюстрировано на фиг. 4C, также когда рассматриваемое транспортное средство перемещается вперед в позицию P3 на скорости транспортного средства в V3, устройство 10 управления обнаруживает новое рекомендованное доступное место Mr для парковки. Устройство 10 управления вычисляет новую точку G3 взгляда и связанные с парковкой затраты, требуемые для перемещения из текущей позиции на каждое доступное место Me для парковки, и обнаруживает место PL5 для парковки, для которого связанные с парковкой затраты являются наименьшими, в качестве рекомендованного доступного места Mr для парковки.
[0047] На этапе 105, доступные места Me для парковки и рекомендованное доступное место Mr для парковки представляются. Устройство 10 управления управляет дисплеем 21 таким образом, чтобы отображать заданные доступные места Me для парковки и заданное рекомендованное доступное место Mr для парковки, чтобы за счет этого представлять их водителю и пассажирам. Ниже описывается форма для отображения на дисплее 21.
[0048] На этапе 106, выполняется определение в отношении того, вводится или нет целевое место Mo для парковки. Целевое место Mo для парковки представляет собой доступное место для парковки, на котором транспортное средство паркуется посредством автоматизированного вождения, и представляет местоположение в качестве цели при автоматизированном вождении. Целевое место Mo для парковки задается на основе операции водителем или пассажиром. Например, когда дисплей 21 представляет собой дисплей с сенсорной панелью, водитель или пассажир касается участка, представляющего требуемое место для парковки, чтобы за счет этого обозначать целевое место Mo для парковки, и информация относительно целевого места Mo для парковки вводится в устройство 10 управления.
[0049] Когда целевое место Mo для парковки вводится, последовательность операций управления переходит к этапу 107. С другой стороны, когда целевое место Mo для парковки не вводится, последовательность операций управления возвращается к этапу 104, и последовательность операций управления от этапа 104 до этапа 106 многократно выполняется.
[0050] Когда целевое место Mo для парковки вводится, это доступное место для парковки задается в качестве целевого места Mo для парковки на этапе 107.
[0051] На этапе 108, устройство 10 управления вычисляет намеченный путь для перемещения рассматриваемого транспортного средства на целевое место Mo для парковки.
[0052] Фиг. 4D является видом, иллюстрирующим окружение, в котором доступное место PL5 для парковки обозначается как целевое место Mo для парковки. Устройство 10 управления вычисляет намеченный путь движения для парковки на основе позиционной взаимосвязи между позицией P4 рассматриваемого транспортного средства, в которой начинается маневр при парковке (перемещение) (начальной позицией автоматизированной парковки), и позицией целевого места Mo для парковки. Хотя не ограничено конкретным образом, устройство 10 управления вычисляет намеченный путь движения, который включает в себя две кривые. Первая кривая лежит от позиции остановки рассматриваемого транспортного средства, т.е. начальной позиции (P4), в которой начинается помощь при парковке, до позиции Mw поворота, в которой выполняется поворот для парковки. Вторая кривая лежит от позиции Mw поворота до целевого места Mo (PL5) для парковки.
[0053] Устройство 10 управления считывает намеченные пути, соответствующие выбранному режиму парковки, и вычисляет намеченный путь движения на основе позиционной взаимосвязи между позицией рассматриваемого транспортного средства при начале процесса автоматизированной парковки и позицией целевого места Mo для парковки. Когда пользователь нажимает вышеописанный переключатель автоблокировки в ходе работы в режиме автоматизированной парковки, устройство 10 управления управляет контроллером 30 транспортного средства, чтобы выполнять процесс перемещения рассматриваемого транспортного средства на целевое место Mo для парковки для вычисленного намеченного пути движения.
[0054] Устройство 10 управления вычисляет намеченный путь движения, соответствующий каждой из парковки (A) под прямым углом, параллельной парковки (B) и парковки (C) под непрямым углом, проиллюстрированных на фиг. 6. В настоящем варианте осуществления, намеченный путь движения описывается в качестве вычисления, но настоящее изобретение не ограничено этим. В альтернативном варианте осуществления, намеченный путь, соответствующий типу места для парковки, сохраняется в запоминающем устройстве (ROM), и намеченный путь может считываться при парковке. Режим парковки (такой как парковка под прямым углом, параллельная парковка и парковка под непрямым углом) может выбираться водителем рассматриваемого транспортного средства.
[0055] На этапе 109, устройство 100 помощи при парковке согласно настоящему варианту осуществления выполняет процесс помощи при парковке или процесс автоматизированной парковки. Устройство 100 помощи при парковке согласно настоящему варианту осуществления управляет работой приводной системы 40 через контроллер 30 транспортного средства таким образом, что рассматриваемое транспортное средство перемещается вдоль намеченного пути движения.
[0056] Устройство 100 помощи при парковке согласно настоящему варианту осуществления включает в себя модуль управления помощью при парковке. Модуль управления помощью при парковке получает информацию диапазона переключения передач из модуля AT/CVT-управления, информацию скорости вращения колес из модуля ABS-управления, информацию угла поворота при рулении из модуля управления углом поворота при рулении, информацию частоты вращения двигателя из ECM и другую необходимую информацию. На ее основе, модуль управления помощью при парковке вычисляет и выводит информацию с инструкциями по автоматизированному рулению в модуль EPS-управления, информацию с инструкциями, такую как предупреждение, в модуль управления измерительными приборами и т.д. Устройство 10 управления получает информационные элементы, которые получаются посредством датчика 50 угла поворота при рулении устройства рулевого управления транспортного средства и датчика 60 скорости транспортного средства и других датчиков транспортного средства через контроллер 30 транспортного средства.
[0057] Приводная система 40 согласно настоящему варианту осуществления обеспечивает возможность рассматриваемому транспортному средству парковаться на целевом месте Mo для парковки посредством вождения на основе сигналов команд управления, полученных из устройства 100 помощи при парковке. Устройство рулевого управления согласно настоящему варианту осуществления представляет собой приводной механизм, который перемещает рассматриваемое транспортное средство в направлениях вправо и влево. EPS-электромотор, включенный в приводную систему 40, приводит в действие механизм усилителя рулевого управления устройства рулевого управления на основе сигналов команд управления, полученных из устройства 100 помощи при парковке, чтобы управлять величиной руления, и помогает в операции при перемещении рассматриваемого транспортного средства на целевое место Mo для парковки. Контент помощи при парковке и схема работы не ограничены конкретным образом, и схемы, известные на момент подачи этой заявки, могут надлежащим образом применяться.
[0058] Когда устройство 100 помощи при парковке согласно настоящему варианту осуществления управляет рассматриваемым транспортным средством таким образом, что оно перемещается на целевое место Mo для парковки вдоль намеченного пути движения, вычисленного на основе позиции P4 рассматриваемого транспортного средства и позиции целевого места Mo для парковки, операция нажатия педали акселератора/тормоза автоматически управляется на основе указанной управляющей скорости транспортного средства (заданной скорости транспортного средства), и операция устройства рулевого управления также автоматически управляется в соответствии со скоростью транспортного средства. Устройство 100 помощи при парковке вычисляет сигналы команд управления в приводную систему 40 рассматриваемого транспортного средства, к примеру, в EPS-электромотор, при возврате выходного значения датчика 50 угла поворота при рулении устройства рулевого управления таким образом, что траектория движения рассматриваемого транспортного средства совпадает с вычисленным намеченным посредством движения, и отправляет сигналы команд управления в приводную систему 40 или в контроллер 30 транспортного средства, который управляет приводной системой 40. Таким образом, во время помощи при парковке согласно настоящему варианту осуществления, операция руления и операция нажатия педали акселератора/тормоза автоматически выполняются. Также можно выполнять процесс парковки посредством дистанционного управления, которое включает в себя передачу команды задания для целевого места Mo для парковки, команды начала процесса парковки, команды приостановки парковки и т.д. в транспортное средство без водителя из внешней среды и выполнение парковки.
[0059] Следует понимать, что водитель также может нажимать педаль акселератора/тормоза, и только работа устройства рулевого управления автоматизирована. В этом случае, устройство 100 помощи при парковке управляет приводной системой 40 на основе заданной скорости транспортного средства, которая предварительно вычисляется таким образом, что рассматриваемое транспортное средство придерживается намеченного пути движения, и управляет устройством рулевого управления транспортного средства на основе заданного угла поворота при рулении, который также предварительно вычисляется.
[0060] Ниже описывается способ представления информации помощи при парковке в устройстве 100 помощи при парковке согласно настоящему варианту осуществления.
[0061] Фиг. 7A является первым видом для описания примера экрана отображения в процессе помощи при парковке согласно настоящему варианту осуществления. Фиг. 7B является вторым видом для описания примера экрана отображения в процессе помощи при парковке согласно настоящему варианту осуществления. Фиг. 7A иллюстрирует экран отображения, когда рассматриваемое транспортное средство движется в позиции P2 по фиг. 4B. Фиг. 7B иллюстрирует экран отображения, когда рассматриваемое транспортное средство движется в позиции P3 по фиг. 4C. Фиг. 7A и 7B представляют информацию помощи при парковке, отображаемую при поиске места для парковки, на котором паркуется рассматриваемое транспортное средство. На фиг. 7A и 7B проиллюстрированы ситуации, в которых рассматриваемое транспортное средство выполняет поиск места для парковки, на котором паркуется рассматриваемое транспортное средство, при перемещении вдоль стрелок.
[0062] На экране отображения по фиг. 7A, изображение (граничных линий мест для парковки), которое указывает места PL2-PL5 и PR2-PR5 для парковки, отображается в левостороннем снятом сверху изображении 21a (виде сверху) на экране дисплея 21. На экране отображения по фиг. 7B, изображение (граничных линий мест для парковки), которое указывает места PL3-PL6 и PR3-PR6 для парковки, отображается в левостороннем снятом сверху изображении 21a (виде сверху) на экране дисплея 21. Центр снятого сверху изображения 21a (вида сверху) отображается со значком рассматриваемого транспортного средства, указывающим позицию рассматриваемого транспортного средства. Изображение для мониторинга (нормальный вид) может отображаться в качестве любого из изображений, захваченных посредством различных камер 1a-1d в соответствии с рабочим состоянием рассматриваемого транспортного средства. Примеры, проиллюстрированные на фиг. 7A и 7B, отображаются в качестве изображения, захваченного посредством камеры 1a, которая располагается на части решетки радиатора рассматриваемого транспортного средства. Когда рассматриваемое транспортное средство перемещается назад, изображение для мониторинга может отображаться в качестве изображения, захваченного посредством камеры 1d, которая располагается около заднего бампера. Изображение 21C представляет собой изображение для сообщений. В этих примерах, снятое сверху изображение 21A и изображение 21B для мониторинга одновременно отображаются на дисплее 21, но только снятое сверху изображение 21A может отображаться на дисплее 21, или только изображение 21B для мониторинга может отображаться на дисплее 21.
[0063] Снятое сверху изображение 21A отображается с доступными местами Me для парковки и рекомендованным доступным местом Mr для парковки. В окружении, в котором рассматриваемое транспортное средство выполняет поиск целевого места для парковки при перемещении на автомобильной парковке, доступные места Me для парковки и рекомендованное доступное место Mr для парковки изменяются по мере того, как рассматриваемое транспортное средство перемещается. Устройство 100 помощи при парковке отображает доступные места Me для парковки и рекомендованное доступное место Mr для парковки, которые последовательно обнаруживаются. Устройство 100 помощи при парковке отображает доступные места Me для парковки с метками доступности парковки в круглой форме и отображает рекомендованное доступное место Mr для парковки с меткой рекомендации в прямоугольной форме.
[0064] Как проиллюстрировано на фиг. 7A и 7B, когда рассматриваемое транспортное средство перемещается, доступные места Me для парковки и рекомендованное доступное место Mr для парковки последовательно изменяются по мере того, как рассматриваемое транспортное средство перемещается. Когда доступное место Me для парковки или рекомендованное доступное место Mr для парковки изменяется, устройство 100 помощи при парковке изменяет позицию метки доступности парковки или метки рекомендации и отображает ее.
[0065] Здесь, описывается форма для отображения рекомендованного доступного места Mr для парковки, когда рассматриваемое транспортное средство перемещается в ходе замедления. Как описано выше, устройство 10 управления задает рекомендованное доступное место Mr для парковки для доступного места Me для парковки, которое является ближайшим к точке взгляда. Расстояние до точки взгляда варьируется в соответствии со скоростью транспортного средства для рассматриваемого транспортного средства.
[0066] Ниже приводится описание для случая, в котором характеристика расстояния до точки взгляда, когда скорость транспортного средства увеличивается, и характеристика расстояния до точки взгляда, когда скорость транспортного средства уменьшается, соответствуют характеристике, проиллюстрированной посредством сплошной линии по фиг. 5, а не гистерезисной характеристике, как проиллюстрировано на фиг. 5. Предполагается, что, в примере по фиг. 4B, рекомендованное доступное место Mr для парковки, заданное, когда скорость транспортного средства составляет Vd, представляет собой доступное место PL5 для парковки. В таком случае, по мере того, как скорость транспортного средства становится ниже Vd из состояния Vd, расстояние до точки взгляда становится меньше Yb, и рекомендованное доступное место Mr для парковки изменяется с доступного места PL5 для парковки на другое доступное место PL4 для парковки. Таким образом, несмотря на тот факт, что рассматриваемое транспортное средство движется к рекомендованному доступному месту Mr (PL5) для парковки, которое задается перед замедлением, экран дисплея 21 показывает перемещение таким образом, что рамка рекомендованного доступного места Mr для парковки возвращается ниже на экране (в направлении, противоположном направлению движения рассматриваемого транспортного средства, т.е. в отрицательном направлении оси Y по фиг. 7A). Чтобы предотвращать такое неестественное перемещение рекомендованного доступного места Mr для парковки в настоящем варианте осуществления, гистерезис предоставляется для характеристики расстояния до точки взгляда относительно скорости транспортного средства.
[0067] С помощью гистерезисной характеристики, расстояние до точки взгляда поддерживается в Yb, когда скорость транспортного средства становится ниже Vd из состояния Vd. Рекомендованное доступное место Mr для парковки в силу этого остается в позиции доступного места PL5 для парковки или перемещается на доступное место PL6 для парковки на стороне направления движения транспортного средства из позиции доступного места PL5 для парковки. Таким образом, из первого доступного места для парковки (соответствующего доступному месту PL5 для парковки по фиг. 4A) и второго доступного места для парковки (соответствующего доступному месту PL4 для парковки по фиг. 4A), которые располагаются рядом вдоль направления, параллельного направлению движения рассматриваемого транспортного средства (вдоль направления по оси Y по фиг. 7A), первое доступное место для парковки дальше от рассматриваемого транспортного средства, чем второе доступное место для парковки, задается в качестве рекомендованного доступного места для парковки посредством устройства 10 управления. Затем в состоянии, в котором скорость транспортного средства для рассматриваемого транспортного средства уменьшается, устройство 10 управления запрещает перемещение рекомендованного доступного места для парковки (соответствующего доступному месту PL5 для парковки по фиг. 4A) из первого доступного места для парковки на второе доступное место для парковки (соответствующее доступному месту PL4 для парковки по фиг. 4A) на экране отображения дисплея 21. Это позволяет предотвращать неестественное перемещение рекомендованного доступного места Mr для парковки.
[0068] Далее, в форме для отображения рекомендованного доступного места Mr для парковки, описывается рыскание в поперечном направлении (в положительном и отрицательном направлениях оси X по фиг. 7A), а также управление для предотвращения такого рыскания.
[0069] Фиг. 4E и 4F являются видами для описания примера процесса помощи при парковке согласно настоящему варианту осуществления. Как описано выше, рекомендованное доступное место Mr для парковки изменяет свою позицию на экране отображения дисплея 21 в соответствии с позицией транспортного средства. Например, в зоне парковки, проиллюстрированной на фиг. 4E, предполагается, что рассматриваемое транспортное средство движется между рядом мест для парковки на левой стороне и рядом мест для парковки на правой стороне (окрестность центра в поперечном направлении указывается посредством штрихпунктирной линии с двумя точками). Также предполагается, что как проиллюстрировано на фиг. 4E, определенное число мест для парковки являются незанятыми в зоне парковки. Когда рассматриваемое транспортное средство движется на левой стороне центральной линии, указываемой посредством штрихпунктирной линии с двумя точками, позиция точки взгляда расположена на левой стороне центральной линии. С другой стороны, когда рассматриваемое транспортное средство движется на правой стороне центральной линии, указываемой посредством штрихпунктирной линии с двумя точками, позиция точки взгляда расположена на правой стороне центральной линии. Соответственно, когда рассматриваемое транспортное средство движется около центра в поперечном направлении относительно направления, в котором размещаются места для парковки, позиция рассматриваемого транспортного средства может раскачиваться поперечно через центральную линию, и позиция точки взгляда также может раскачиваться поперечно. Поскольку доступное место Me для парковки, ближайшее к точке взгляда, задается в качестве рекомендованного доступного места Mr для парковки, отображаемая рамка рекомендованного доступного места Mr для парковки должна часто перемещаться вправо и влево. В настоящем варианте осуществления, управление выполняется, как пояснено ниже, чтобы предотвращать такое рыскание рекомендованного доступного места Mr для парковки.
[0070] Устройство 10 управления задает фиксированный режим отображения для фиксации области отображения для рекомендованного доступного места Mr для парковки в соответствии с числом доступных мест Me для парковки. В фиксированном режиме отображения, область, в которой может задаваться рекомендованное доступное место Mr для парковки, фиксируется как любая из левой стороны и правой стороны. Устройство 10 управления сравнивает число доступных мест Me для парковки с предварительно определенным значением. Когда число доступных мест Me для парковки не меньше предварительно определенного значения, устройство 10 управления задает режим отображения как фиксированный режим отображения.
[0071] Когда фиксированный режим отображения задается, устройство 10 управления выбирает одну из правой и левой областей в качестве задаваемой области для рекомендованного доступного места Mr для парковки в соответствии с состоянием движения рассматриваемого транспортного средства. Когда задаваемая область задается, устройство 10 управления задает рекомендованное доступное место для парковки из доступных мест для парковки, включенных в задаваемую область. Устройство 10 управления вычисляет расстояния от мест для парковки, расположенных на сторонах рассматриваемого транспортного средства, до рассматриваемого транспортного средства в качестве поперечных расстояний (XL, XR). В примерах по фиг. 4E и 4F, XL представляет поперечное расстояние на левой стороне, и XR представляет поперечное расстояние на правой стороне. Устройство 10 управления сравнивает XL с XR. Когда XL меньше XR, устройство 10 управления задает область на левой стороне в качестве задаваемой области для рекомендованного доступного места Mr для парковки. Когда XR меньше XL, устройство 10 управления задает область на правой стороне в качестве задаваемой области для рекомендованного доступного места Mr для парковки.
[0072] После задания задаваемой области для рекомендованного доступного места Mr для парковки справа или слева, устройство 10 управления суммирует длину XHIS в с длиной (W/2). Длина (W/2) представляет собой длину, полученную посредством сокращения вдвое длины поперечного расстояния между левосторонними местами для парковки и правосторонними местами для парковки. Длина XHIS представляет собой длину, которая задает смещение. Когда левосторонняя область задается в качестве задаваемой области для рекомендованного доступного места Mr для парковки, устройство 10 управления сравнивает левостороннее поперечное расстояние XL с длиной (XHIS+W /2), с которой суммируется смещение XHIS. Когда левостороннее поперечное расстояние XL превышает длину (XHIS+W/2), устройство 10 управления изменяет задаваемую область для рекомендованного доступного места Mr для парковки с левосторонней области на правостороннюю область. Когда левостороннее поперечное расстояние XL не превышает длину (XHIS+W/2), устройство 10 управления поддерживает состояние, в котором левосторонняя область задается в качестве задаваемой области для рекомендованного доступного места Mr для парковки.
[0073] Как проиллюстрировано на фиг. 4E, после того, как задаваемая область для рекомендованного доступного места Mr для парковки задается как левая сторона, когда левостороннее поперечное расстояние XL не больше длины (XHIS+W/2), устройство 10 управления поддерживает состояние, в котором задаваемая область для рекомендованного доступного места Mr для парковки задается как левая сторона. С другой стороны, как проиллюстрировано на фиг. 4F, после того, как задаваемая область для рекомендованного доступного места Mr для парковки задается как левосторонняя область, когда рассматриваемое транспортное средство движется на правой стороне центральной линии, и левостороннее поперечное расстояние XL превышает длину (XHIS+W/2), устройство 10 управления изменяет задаваемую область для рекомендованного доступного места Mr для парковки с левосторонней области на правостороннюю область. Через эту операцию, выбор между правой стороной и левой стороной при задании в качестве задаваемой области может иметь гистерезисную характеристику относительно поперечной позиции рассматриваемого транспортного средства. Например, когда левосторонняя область задается в качестве задаваемой области для рекомендованного доступного места Mr для парковки, рекомендованное доступное место Mr для парковки предпочтительно отображается в левосторонней области по сравнению с правой стороной. Это позволяет подавлять возникновение рыскания рекомендованного доступного места Mr для парковки на экране отображения дисплея 21. В вышеприведенном описании, левосторонняя область задается в качестве задаваемой области для рекомендованного доступного места Mr для парковки, и задаваемая область для рекомендованного доступного места Mr для парковки изменяется в соответствии с результатом сравнения между поперечным расстоянием (XL) рассматриваемого транспортного средства и длиной (XHIS+W/2), но когда правосторонняя область задается в качестве задаваемой области для рекомендованного доступного места Mr для парковки, задаваемая область для рекомендованного доступного места Mr для парковки изменяется в соответствии с результатом сравнения между поперечным расстоянием (XR) рассматриваемого транспортного средства и длиной (XHIS+W/2).
[0074] Когда число доступных мест Me для парковки меньше предварительно определенного значения, устройство 10 управления задает режим отображения как нормальный режим. В нормальном режиме, задаваемая область не задается. Когда зона парковки включает в себя небольшое число незанятых мест для парковки, представление рекомендации относительно незанятых мест для парковки водителю и пассажирам может быть более важным, чем предотвращение рыскания. Таким образом, может повышаться удобство системы для водителя и пассажиров.
[0075] Когда рассматриваемое транспортное средстве останавливается из состояния перемещения, как проиллюстрировано на фиг. 7A и 7B, экран отображения дисплея 21 становится экраном, как проиллюстрировано на фиг. 7C. Фиг. 7C является третьим видом для описания примера экрана отображения в процессе помощи при парковке согласно настоящему варианту осуществления. Экран отображения по фиг. 7C представляет собой экран отображения, когда рассматриваемое транспортное средство останавливается в позиции P3 на фиг. 4C.
[0076] Как проиллюстрировано на экране отображения по фиг. 7C, пользователь находит сообщения, включенные в изображение 21C, и может подтверждать то, что требуется выбор и ввод целевого места Mo для парковки. Пользователь обозначает место PL5 для парковки, которое представляется в качестве рекомендованного доступного места Mr для парковки, в качестве целевого места Mo для парковки. Пользователь касается места PL5 для парковки, которое отображается на дисплее 21 с сенсорной панелью, чтобы за счет этого обозначать это место для парковки в качестве целевого места Mo для парковки. Экран отображения дисплея изменяется с экрана отображения по фиг. 7C на экран отображения по фиг. 7D.
[0077] Фиг. 7D является четвертым видом для описания примера экрана отображения в процессе помощи при парковке согласно настоящему варианту осуществления. Экран отображения по фиг. 7D представляет собой экран отображения, когда транспортное средство останавливается в позиции P4 на фиг. 4D.
[0078] Устройство 10 управления управляет дисплеем 21 таким образом, чтобы отображать экран отображения, как проиллюстрировано на фиг. 7D, чтобы за счет этого представлять целевое место Mo для парковки водителю и пассажирам. Водитель и пассажиры находят сообщения, включенные в изображение 21C, и могут подтверждать, что автоматизированное вождение может начинаться.
[0079] Фиг. 7E является пятым видом для описания примера экрана отображения в процессе помощи при парковке согласно настоящему варианту осуществления. Когда автоматизированное вождение начинается, экран отображения дисплея 21 становится экраном, как проиллюстрировано на фиг. 7E, и рассматриваемое транспортное средство перемещается вперед. В это время, изображение 21C отображается с сообщениями, информирующими в отношении того, что рассматриваемое транспортное средство перемещается вперед посредством автоматизированного вождения, и в отношении того, что водитель и пассажиры должны смотреть рядом с рассматриваемым транспортным средством.
[0080] Вышеприведенное описание служит для базового процесса управления в системе помощи при парковке согласно настоящему варианту осуществления. В настоящем варианте осуществления, следующее управление выполняется в дополнение к базовому процессу управления.
[0081] Фиг. 8A является первым видом для описания примера процесса помощи при парковке согласно настоящему варианту осуществления. Фиг. 8B является вторым видом для описания примера процесса помощи при парковке согласно настоящему варианту осуществления. На фиг. 8A и 8B проиллюстрированы ситуации, в которых рассматриваемое транспортное средство выполняет поиск места для парковки, на котором паркуется рассматриваемое транспортное средство, при перемещении вдоль стрелок. Фиг. 8B иллюстрирует ситуацию после того, как определенное время проходит от момента времени по фиг. 8A. На фиг. 8A, P8 представляет позицию движения рассматриваемого транспортного средства, V8 представляет скорость транспортного средства, Me представляет доступные места для парковки, обнаруженные в позиции P8, и Mr представляет рекомендованное доступное место для парковки. На фиг. 8B, P9 представляет позицию движения рассматриваемого транспортного средства, V9 представляет скорость транспортного средства, M2 представляет препятствие, Me представляет доступные места для парковки, обнаруженные в позиции P9, и Mr представляет рекомендованное доступное место для парковки. На фиг. 8A и 8B, G8 представляет точку взгляда, и L представляет намеченный путь движения, когда транспортное средство паркуется посредством автоматизированного вождения.
[0082] Как проиллюстрировано на фиг. 8A, когда рассматриваемое транспортное средство движется в позиции P8, устройство 10 управления получает информацию относительно скорости V8 транспортного средства и обращается к карте, чтобы вычислять расстояние до точки взгляда. Устройство 10 управления указывает позицию, отделенную от позиции P8 транспортного средства на расстояние до точки взгляда, в качестве точки (G8) взгляда. Устройство 10 управления обнаруживает место для парковки, ближайшее к точке (G8) взгляда из числа доступных мест для парковки, в качестве рекомендованного места Mr для парковки.
[0083] Как проиллюстрировано на фиг. 8B, когда рассматриваемое транспортное средство движется в позиции P9, устройство 10 управления получает информацию относительно скорости V9 транспортного средства и вычисляет расстояние до точки взгляда. Устройство 10 управления указывает точку G8, отделенную от позиции P9 транспортного средства на расстояние до точки взгляда, в качестве точки (G8) взгляда. По мере того, как скорость транспортного средства уменьшается с V8 до V9, расстояние до точки взгляда становится небольшим, так что позиция точки G8 взгляда не изменяется, даже когда транспортное средство перемещается.
[0084] Предполагается, что препятствие, такое как животное и человек, входит на место PL5 для парковки, например в то время, когда транспортное средство перемещается из позиции P8 в позицию P9, или препятствие, которое не может обнаруживаться в позиции P8, обнаруживается в то время, когда транспортное средство перемещается к позиции P9, либо когда транспортное средство прибывает в позицию P9. Как проиллюстрировано на фиг. 8B, когда препятствие M2 присутствует на рекомендованном доступном месте Mr для парковки, рассматриваемое транспортное средство не может парковаться на рекомендованном доступном месте Mr для парковки. Даже когда препятствие M2 присутствует на рекомендованном доступном месте Mr для парковки, если препятствие M2 выезжает из рекомендованного доступного места Mr для парковки до того, как рассматриваемое транспортное средство въезжает на рекомендованное доступное место Mr для парковки, рассматриваемое транспортное средство может парковаться на рекомендованном доступном месте Mr для парковки. В частности, когда препятствие M2 представляет собой движущийся объект, такой как животное и человек, период, в течение которого препятствие M2 остается на рекомендованном доступном месте Mr для парковки, зачастую может быть небольшим. В таком случае, до того, как рассматриваемое транспортное средство паркуется на рекомендованном доступном месте Mr для парковки, препятствие M2 выезжает из рекомендованного доступного места Mr для парковки. В силу этого лучше продолжать представлять место PL5 для парковки в качестве рекомендованного доступного места Mr для парковки пользователю вместо представления другого доступного места для парковки, отличающегося от места PL5 для парковки, в качестве рекомендованного доступного места Mr для парковки пользователю.
[0085] Фиг. 8C является третьим видом для описания примера процесса помощи при парковке согласно настоящему варианту осуществления. На фиг. 8C проиллюстрирована ситуация, в которой рассматриваемое транспортное средство выполняет поиск места для парковки, на котором паркуется рассматриваемое транспортное средство, при перемещении вдоль стрелки. Фиг. 8C иллюстрирует ситуацию после того, как определенное время проходит от момента времени по фиг. 8A. На фиг. 8C, P9 представляет позицию движения рассматриваемого транспортного средства, V9 представляет скорость транспортного средства, M3 представляет препятствие, Me представляет доступные места для парковки, обнаруженные в позиции P9, Mr представляет рекомендованное доступное место для парковки, G8 представляет точку взгляда, и L представляет намеченный путь движения, когда транспортное средство паркуется посредством автоматизированного вождения.
[0086] Предполагается, что препятствие, такое как животное и человек, входит в намеченный путь L движения, например, в то время, когда транспортное средство перемещается из позиции P8 в позицию P9. Как проиллюстрировано на фиг. 8C, когда препятствие M3 присутствует на намеченном пути L движения, рассматриваемое транспортное средство не может парковаться на рекомендованном доступном месте Mr для парковки. Даже когда препятствие M3 присутствует на намеченном пути L движения, который оценивается для парковки, если препятствие M3 перемещается в позицию, отличную от намеченного пути L движения, до того, как рассматриваемое транспортное средство движется в позицию препятствия посредством автоматизированного вождения, рассматриваемое транспортное средство может парковаться на рекомендованном доступном месте Mr для парковки. В таком случае, лучше продолжать представлять доступное место PL5 для парковки в качестве рекомендованного доступного места Mr для парковки пользователю вместо представления другого доступного места для парковки, отличающегося от доступного места PL5 для парковки, в качестве рекомендованного доступного места Mr для парковки пользователю.
[0087] Фиг. 9 является блок-схемой последовательности операций способа, иллюстрирующей процедуру управления процесса помощи при парковке, выполняемого посредством системы 1000 помощи при парковке согласно настоящему варианту осуществления. Когда рекомендованное доступное место Mr для парковки обнаруживается и отображается на дисплее 21, процесс управления, проиллюстрированный на фиг. 9, инициируется с возможностью начинаться. Последовательность операций управления, проиллюстрированная на фиг. 9, многократно выполняется с предварительно определенным периодом до тех пор, пока целевое место Mo для парковки не будет задано.
[0088] На этапе 201, устройство 10 управления обнаруживает, присутствует или нет препятствие на рекомендованном доступном месте Mr для парковки (или на намеченном пути L движения), на основе изображений, захваченных посредством камер 1a-1d, и/или данных, принимаемых посредством устройства 3 измерения дальности. Диапазон обнаружения для присутствия или отсутствия препятствия на намеченном пути L движения может включать в себя зону вокруг намеченного пути L движения в дополнение к зоне на намеченном пути движения. Зона вокруг намеченного пути L движения представляет собой диапазон, который затрагивает автоматизированную парковку от начальной позиции автоматизированной парковки до позиции рекомендованного доступного места Mr для парковки. Таким образом, когда рассматриваемое транспортное средство паркуется на рекомендованном доступном месте Mr для парковки, устройство 10 управления обнаруживает препятствие, которое создает препятствие автоматизированному вождению. Когда препятствие не обнаруживается, последовательность операций управления для этапа 201 выполняется до тех пор, пока препятствие не будет обнаружено.
[0089] На этапе 202, устройство 10 управления определяет то, представляет или нет обнаруженное препятствие собой движущийся объект. Чтобы определять то, представляет или нет обнаруженное препятствие собой движущийся объект, вычисляется вектор обнаруженного препятствия, и когда абсолютная величина (скорость) вектора не меньше предварительно определенного значения, выполняется определение в отношении того, что, обнаруженное препятствие представляет собой движущийся объект. Помимо этого или альтернативно, при условии, что изображения движущихся объектов, которые должны обнаруживаться, предварительно сохраняются, движущийся объект может обнаруживаться посредством известной технологии обработки изображений, такой как сопоставление с шаблоном.
[0090] На вышеописанном этапе 103, когда доступные места Me для парковки обнаруживаются с точки зрения присутствия или отсутствия препятствия, место для парковки, которое должно обнаруживаться, может находиться в слепой зоне камер, например, в случае если транспортное средство останавливается рядом с зоной парковки, которая должна обнаруживаться. В таком случае, препятствие не может обнаруживаться на месте для парковки, которое должно обнаруживаться, и место для парковки может задаваться в качестве доступного места Me для парковки или в качестве рекомендованного доступного места Mr для парковки. Когда, на этапе 202, препятствие представляет собой неподвижный объект, такой как Color Cone (зарегистрированная торговая марка), процедура переходит к этапу 209, на котором задается другое рекомендованное доступное место Mr для парковки, и заданное другое рекомендованное доступное место Mr для парковки отображается на дисплее 21. Через эту операцию, когда рекомендованное доступное место Mr для парковки находится в слепой зоне, и препятствие не может обнаруживаться, препятствие обнаруживается снова, и другое рекомендованное доступное место Mr для парковки может отображаться, чтобы за счет этого представлять соответствующее место для парковки водителю и пассажирам в соответствии с препятствием.
[0091] На этапе 203, выполняется определение в отношении того, должен или нет перемещаться движущийся объект. Эта вероятность перемещения вычисляется в соответствии со скоростью препятствия. Когда скорость препятствия ниже предварительно определенного порогового значения, выполняется определение в отношении того, что вероятность перемещения отсутствует, поскольку рассматриваемое транспортное средство не может парковаться на рекомендованном доступном месте Mr для парковки вследствие присутствия препятствия. Когда препятствие, в частности, указывается посредством обнаружения этапа 201, вероятность перемещения вычисляется в соответствии с атрибутом указанного препятствия. Атрибут служит для классификации транспортного средства, животного, человека и т.д., например, и предварительно задается. Например, когда транспортное средство указывается в качестве препятствия в пределах рекомендованного доступного места Mr для парковки, транспортное средство может парковаться на рекомендованном доступном месте Mr для парковки, и вероятность того, что транспортное средство выезжает из рекомендованного доступного места Mr для парковки, является низкой. В таком случае, устройство 10 управления определяет то, что вероятность перемещения отсутствует. Когда выполняется определение в отношении того, что вероятность перемещения отсутствует, процедура переходит к этапу 209. Последовательность операций управления от этапа 201 до этапа 203 предоставляет возможность обнаружения в отношении того, не может или может рассматриваемое транспортное средство парковаться на рекомендованном доступном месте Mr для парковки вследствие присутствия препятствия (это состояние в дальнейшем также упоминается как "состояние недоступности парковки").
[0092] На этапе 204, устройство 10 управления задает время ожидания. Время ожидания соответствует времени из временного интервала обнаружения препятствия до временного интервала изменения отображаемой рамки рекомендованного доступного места Mr для парковки. Временной интервал обнаружения препятствия представляет собой временной интервал выполнения последовательности операций управления для этапа 201. Временной интервал изменения отображаемой рамки представляет собой временной интервал изменения отображаемой рамки рекомендованного доступного места Mr для парковки, которое сразу отображается на экране отображения дисплея 21, на позицию другого рекомендованного доступного места Mr для парковки.
[0093] Фиг. 10 является графиком, иллюстрирующим взаимосвязь между размером препятствия и временем ожидания. На фиг. 10, C представляет размер препятствия, и T представляет время ожидания. Размер препятствия представляется посредством площади или объема препятствия.
[0094] Как проиллюстрировано на фиг. 10, когда размер препятствия меньше Ca, время ожидания составляет Tb (>Ta). Когда размер препятствия находится в пределах диапазона Ca или больше и Cb или меньше, время T ожидания уменьшается пропорционально размеру препятствия. Когда размер препятствия превышает Ca, время ожидания составляет Ta. Когда препятствие является небольшим, таким как животное и человек (пешеход), скорость перемещения или величина перемещения является большой. Когда препятствие является большим, таким как транспортное средство и крупногабаритный багаж, скорость или величина перемещения при перемещении является небольшой. Когда скорость перемещения или величина перемещения является большой, вероятность перемещения препятствия является высокой, и в силу этого лучше увеличивать длительность времени ожидания. С другой стороны, когда скорость перемещения или величина перемещения является небольшой, вероятность перемещения препятствия является низкой, и в силу этого нет необходимости задавать длительное время ожидания. С таких точек зрения, устройство 10 управления задает более длительное время ожидания, когда препятствие больше, и задает более короткое время ожидания, когда препятствие меньше.
[0095] На этапе 205, устройство 10 управления обнаруживает то, присутствует или нет препятствие на рекомендованном доступном месте Mr для парковки или на намеченном пути L движения в течение времени ожидания.
[0096] На этапе 206, выполняется определение в отношении того, прошло или нет заданное время ожидания. Когда время ожидания прошло, процедура переходит к этапу 209.
[0097] На этапе 207, устройство 10 управления определяет то, отменяется или нет состояние недоступности парковки по мере того, как обнаруженное препятствие перемещается. Допустим, что препятствие выезжает из рекомендованного доступного места Mr для парковки из состояния, в котором препятствие присутствует на рекомендованном доступном месте Mr для парковки, когда время ожидания задается. В таком случае, по мере того, как препятствие перемещается, получается состояние, в котором рассматриваемое транспортное средство может парковаться на рекомендованном доступном месте Mr для парковки, так что состояние недоступности парковки отменяется. Также допустим, что препятствие перемещается за пределы намеченного пути L движения из состояния, в котором препятствие присутствует на намеченном пути L движения, когда время ожидания задается. В таком случае, по мере того, как препятствие перемещается, получается состояние, в котором рассматриваемое транспортное средство может парковаться на рекомендованном доступном месте Mr для парковки, так что состояние недоступности парковки отменяется. Когда состояние недоступности парковки не отменяется, процедура возвращается к этапу 205, и препятствие обнаруживается в течение времени ожидания.
[0098] После отмены состояния недоступности парковки выполняется этап 208, на котором устройство 10 управления поддерживает форму для отображения отображаемой рамки заданного рекомендованного доступного места Mr для парковки. Таким образом, устройство 10 управления обеспечивает возможность отображения рамки рекомендованного доступного места Mr для парковки на месте для парковки, идентичном заданному рекомендованному доступному месту Mr для парковки. Через эту операцию, когда состояние недоступности парковки отменяется до того, как проходит время ожидания, форма для отображения рекомендованного доступного места Mr для парковки на дисплее 21 поддерживается.
[0099] Например, в примере по фиг. 8B, предполагается, что рекомендованное доступное место Mr для парковки задается равным доступному месту PL5 для парковки, и рамка рекомендованного доступного места Mr для парковки отображается в позиции доступного места PL5 для парковки на экране отображения дисплея 21. Также предполагается, что препятствие M2 затем выезжает из доступного места PL5 для парковки до того, как проходит заданное время ожидания (время ожидания, заданное в соответствии с размером препятствия M2). В таком случае, устройство 10 управления обеспечивает возможность отображения рамки рекомендованного доступного места Mr для парковки в позиции доступного места PL5 для парковки на экране отображения дисплея 21.
[0100] На этапе 209, устройство 10 управления задает другое рекомендованное доступное место Mr для парковки, отличающееся от заданного рекомендованного доступного места Mr для парковки, и управляет дисплеем 21 таким образом, чтобы отображать другое рекомендованное доступное место Mr для парковки. Таким образом, устройство 10 управления обеспечивает возможность отображения рамки рекомендованного доступного места Mr для парковки на доступном месте для парковки, отличающемся от заданного рекомендованного доступного места Mr для парковки. Обнаружение и представление другого рекомендованного доступного места Mr для парковки могут выполняться посредством выполнения последовательности операций управления, идентичной этапам 104 и 105, проиллюстрированным на фиг. 2. Через эту операцию, когда состояние недоступности парковки не отменяется до того, как проходит время ожидания, другое рекомендованное доступное место Mr для парковки, отличающееся от рекомендованного доступного места Mr для парковки, отображаемого на дисплее 21, задается, и другое рекомендованное доступное место Mr для парковки отображается на дисплее 21.
[0101] Например, в примере по фиг. 8C, предполагается, что рекомендованное доступное место Mr для парковки задается равным доступному месту PL5 для парковки, и рамка рекомендованного доступного места Mr для парковки отображается в позиции доступного места PL5 для парковки на экране отображения дисплея 21. Также предполагается, что препятствие M3 остается на намеченном пути L движения даже после того, как проходит заданное время ожидания (время ожидания, заданное в соответствии с размером препятствия M3). В таком случае, устройство 10 управления задает место для парковки, ближайшее к точке G8 взгляда, из множества доступных мест Me для парковки, которые не включают в себя место PL5 для парковки, в качестве нового рекомендованного доступного места Mr для парковки. В примере по фиг. 8C, место PL6 для парковки задается в качестве нового рекомендованного доступного места Mr для парковки. Связанные с парковкой затраты и идентификационный номер назначаются каждому доступному месту Me для парковки таким образом, что они ассоциированы с ним, и место для парковки с идентификационным номером, назначаемым рядом с местом PL5 для парковки, может задаваться в качестве нового рекомендованного доступного места Mr для парковки. Затем устройство 10 управления обеспечивает возможность отображения рамки рекомендованного доступного места Mr для парковки в позиции места PL6 для парковки на экране отображения дисплея 21.
[0102] Вышеуказанная последовательность операций управления от этапа 201 до этапа 209 описывается при условии, что она выполняется после того, как рекомендованное доступное место Mr для парковки задается, и до того, как целевое место Mo для парковки задается. Как описано ниже, последовательность операций управления от этапа 201 до этапа 209 может выполняться после того, как целевое место Mo для парковки задается. В случае если последовательность операций управления от этапа 201 до этапа 209 выполняется после того, как целевое место Mo для парковки задается, когда на этапе 207 выполняется определение в отношении того, отменяется или нет состояние недоступности парковки, место для парковки, которое должно определяться, может представлять собой целевое место Mo для парковки вместо рекомендованного доступного места Mr для парковки. Ниже описывается эта последовательность операций управления со ссылкой на конкретный пример.
[0103] Фиг. 8D является четвертым видом для описания примера процесса помощи при парковке согласно настоящему варианту осуществления. На фиг. 8D проиллюстрирована ситуация, в которой парковка выполняется посредством автоматизированного вождения. На фиг. 8D, P4 представляет начальную позицию помощи при парковке, Mw представляет позицию поворота, Vx представляет рассматриваемое транспортное средство, и Vy представляет другое транспортное средство.
[0104] Предполагается, что когда рассматриваемое транспортное средство Vx перемещается посредством автоматизированного вождения на намеченном пути L движения от начальной позиции (P4) помощи при парковке, другое транспортное средство Vy паркуется на целевом месте Mo для парковки. Как проиллюстрировано на фиг. 8D, рассматриваемое транспортное средство Vx перемещается к доступному месту PL5 для парковки, которое задается в качестве целевого места Mo для парковки, но водитель другого транспортного средства Vy не знает в отношении операции автоматизированного вождения рассматриваемого транспортного средства Vx, и другое транспортное средство Vy паркуется на доступном месте PL5 для парковки до рассматриваемого транспортного средства Vx. В таком случае, рассматриваемое транспортное средство Vx не может парковаться на целевом месте Mo для парковки вследствие присутствия другого транспортного средства Vy. В силу этого лучше представлять другое рекомендованное доступное место Mr для парковки пользователю в качестве замены для мест PL5 для парковки.
[0105] После задания целевого места Mo для парковки, устройство 10 управления выполняет последовательность операций управления от этапа 201 до этапа 209. На фиг. 8D, когда другое транспортное средство Vy паркуется на месте PL5 для парковки, другое транспортное средство Vy обнаруживается в качестве движущегося объекта без вероятности перемещения. В последовательности операций управления для этапа 203, в силу этого процедура переходит к "Нет". На этапе 209, устройство 10 управления задает другое рекомендованное доступное место Mr для парковки, отличающееся от заданного целевого места Mo для парковки, и управляет дисплеем 21 таким образом, чтобы представлять другое рекомендованное доступное место Mr для парковки. Через эту операцию, когда состояние недоступности парковки не отменяется до того, как проходит время ожидания, другое рекомендованное доступное место Mr для парковки, отличающееся от рекомендованного доступного места Mr для парковки, отображаемого на дисплее 21, задается, и дисплей 21 управляется с возможностью отображать другое рекомендованное доступное место Mr для парковки.
[0106] На фиг. 8D, когда другое транспортное средство Vy перемещается для парковки на месте PL5 для парковки, другое транспортное средство Vy обнаруживается в качестве движущегося объекта с вероятностью перемещения. В последовательности операций управления для этапа 203, в силу этого процедура переходит к "Да". На этапе 204, время ожидания, соответствующее другому транспортному средству Vy, задается. Время ожидания представляет собой короткое время (Ta: см. фиг. 10), поскольку другое транспортное средство Vy представляет собой крупное препятствие. После этого, даже после того, как короткое время (Ta) проходит, рассматриваемое транспортное средство Vx не может парковаться на целевом месте Mo для парковки вследствие присутствия другого транспортного средства Vy (состояние недоступности парковки не отменяется до того, как проходит время Ta ожидания), и в силу этого процедура переходит к "Да" в последовательности операций управления для этапа 206. На этапе 209, другое рекомендованное доступное место Mr для парковки, отличающееся от рекомендованного доступного места Mr для парковки, отображаемого на дисплее 21, задается, и дисплей 21 управляется с возможностью отображать другое рекомендованное доступное место Mr для парковки.
[0107] Ниже описывается другой пример препятствия. Допустим, что когда рассматриваемое транспортное средство Vx перемещается посредством автоматизированного вождения на намеченном пути L движения из начальной позиции (P4) помощи при парковке, небольшое препятствие, такое как животное и человек, вторгается в зону намеченного пути L движения или на целевое место Mo для парковки. В таком случае, препятствие обнаруживается в качестве движущегося объекта с вероятностью перемещения, и в силу этого процедура переходит к "Да" в последовательности операций управления для этапа 203. На этапе 204, время ожидания, соответствующее препятствию, задается. Время ожидания представляет собой длительное время (Tb), поскольку препятствие представляет собой небольшое препятствие, такое как животное и человек. Затем состояние недоступности парковки отменяется вследствие перемещения препятствия до того, как проходит длительное время (Tb), и в силу этого процедура переходит к "Да" в последовательности операций управления для этапа 207. На этапе 208, устройство 10 управления поддерживает форму для отображения отображаемой рамки заданного целевого места Mo для парковки.
[0108] Последовательность операций управления от этапа 201 до этапа 209 представляет собой последовательность операций для формы для отображения рекомендованного доступного места Mr для парковки, но также может применяться к форме для отображения доступного места Me для парковки. В случае управления формой для отображения доступного места Me для парковки, когда доступное место Me для парковки обнаруживается и отображается на дисплее 21, процесс управления, проиллюстрированный на фиг. 9, инициируется с возможностью начинаться. Затем на этапах 201 и 205, устройство 10 управления обнаруживает то, присутствует или нет препятствие на доступном месте Me для парковки (вместо рекомендованного доступного места Mr для парковки) или на намеченном пути L движения. Объекты, которые должны определяться на этапах 202, 203 и 207, представляют собой препятствия, присутствующие на доступном месте Me для парковки и на намеченном пути L движения.
[0109] Как описано выше, в настоящем варианте осуществления, доступное место для парковки указывается, и указанное доступное место для парковки отображается на дисплее 21. В случае состояния недоступности парковки, выполняется определение в отношении того, отменяется или нет состояние недоступности парковки. Когда состояние недоступности парковки отменяется до того, как проходит время ожидания, форма для отображения доступного места для парковки на дисплее 21 поддерживается. Это обеспечивает возможность представления соответствующего места для парковки водителю и пассажирам в соответствии с препятствием.
[0110] В настоящем варианте осуществления, когда выполняется определение в отношении того, что состояние недоступности парковки не отменяется до того, как проходит время ожидания, другое доступное место для парковки, отличающееся от доступного места для парковки, отображаемого на дисплее 21, задается, и другое доступное место для парковки отображается на дисплее. Это обеспечивает возможность представления соответствующего места для парковки водителю и пассажирам в соответствии с препятствием.
[0111] В настоящем варианте осуществления, требуемое время для парковки, когда рассматриваемое транспортное средство паркуется на доступном месте для парковки посредством автоматизированного управления с помощью контроллера, вычисляется для каждого из множества мест для парковки и из множества доступных мест для парковки, доступное место для парковки, для которого требуемое время для парковки меньше предварительно определенного времени, задается в качестве другого рекомендованного доступного места для парковки. Через эту операцию, когда другое доступное место для парковки представляется, место для парковки, для которого требуемое время для парковки является небольшим, может представляться водителю и пассажирам.
[0112] В настоящем варианте осуществления, атрибут препятствия обнаруживается, и время ожидания задается в соответствии с атрибутом препятствия. Это обеспечивает возможность представления места для парковки водителю и пассажирам в надлежащий временной интервал в соответствии с размером препятствия.
[0113] В настоящем варианте осуществления, размер препятствия обнаруживается, и время ожидания задается в соответствии с размером препятствия. Это обеспечивает возможность представления места для парковки водителю и пассажирам в надлежащий временной интервал в соответствии с размером препятствия.
[0114] В настоящем варианте осуществления, рекомендованное доступное место для парковки, отображаемое на дисплее 21, задается в качестве целевого места Mo для парковки на основе операции водителем или пассажиром рассматриваемого транспортного средства, целевое место Mo для парковки отображается на дисплее 21, выполняется обнаружение в отношении того, находится или нет целевое место Mo для парковки в состоянии недоступности парковки вследствие присутствия препятствия, и выполняется обнаружение в отношении того, отменяется или нет состояние недоступности парковки по мере того, как препятствие перемещается до того, как проходит время ожидания (соответствующее "второму времени" настоящего изобретения). Когда состояние недоступности парковки отменяется до того, как проходит время ожидания, форма для отображения целевого места Mo для парковки на дисплее 21 поддерживается. Это обеспечивает возможность представления соответствующего места для парковки водителю и пассажирам в соответствии с препятствием.
[0115] В настоящем варианте осуществления, когда последовательность операций управления от этапа 201 до этапа 209 выполняется после того, как целевое место Mo для парковки задается, устройство 10 управления может приостанавливать автоматизированное вождение, чтобы переводить рассматриваемое транспортное средство в состояние остановки в течение периода подсчета времени ожидания. Это обеспечивает возможность проектирования высокозащищенной системы.
[0116] В настоящем варианте осуществления, число рекомендованных доступных мест Mr для парковки, заданных посредством устройства 10 управления, не ограничено одним и может составлять два или более. Число рекомендованных доступных мест Mr для парковки, отображаемых на дисплее 21, также не ограничено одним и может составлять два или более.
[0117] В настоящем варианте осуществления, чтобы не допускать демонстрацию неестественного перемещения посредством экрана отображения дисплея 21 таким образом, что рамка рекомендованного доступного места Mr для парковки возвращается ниже на экране, гистерезисная характеристика предоставляется для взаимосвязи между скоростью транспортного средства и расстоянием до точки взгляда, но управление может модифицироваться, как пояснено ниже. Как проиллюстрировано на фиг. 4C, устройство 10 управления задает место PL5 для парковки в качестве рекомендованного доступного места Mr для парковки и управляет дисплеем 21 таким образом, чтобы отображать рекомендованное доступное место Mr для парковки. По мере того, как рассматриваемое транспортное средство замедляется, устройство 10 управления задает место PL4 для парковки в качестве рекомендованного доступного места Mr для парковки. Устройство 10 управления управляет дисплеем 21 таким образом, чтобы продолжать отображать место PL5 для парковки в качестве рекомендованного доступного места Mr для парковки вместо отображения заданного места PL4 для парковки. Таким образом, при управлении заданием для рекомендованного доступного места Mr для парковки, даже когда позиция доступного места для парковки относительно перемещается в направлении приближения к рассматриваемому транспортному средству вследствие уменьшения скорости транспортного средства, позиция отображения рекомендованного доступного места Mr для парковки фиксируется на экране отображения дисплея 21. Это позволяет предотвращать неестественное перемещение рекомендованного доступного места Mr для парковки.
[0118] В настоящем варианте осуществления, доступное место Me для парковки, ближайшее к точке взгляда, задается в качестве рекомендованного доступного места Mr для парковки, но доступное место Me для парковки, для которого расстояние от точки взгляда до доступного места Me для парковки меньше предварительно определенного порогового значения расстояния, может задаваться в качестве рекомендованного доступного места Mr для парковки. Когда имеется множество рекомендованных доступных мест Mr для парковки, которые могут задаваться в соответствии с расстояниями от точки взгляда до доступных мест Me для парковки, место для парковки, для которого связанные с парковкой затраты являются низкими, может задаваться в качестве рекомендованного доступного места Mr для парковки.
[0119] В настоящем варианте осуществления, доступное место для парковки указывается, и препятствие в указанном доступном месте для парковки обнаруживается, но может выполняться определение в отношении того, отменяется или нет состояние недоступности парковки доступного места для парковки без обнаружения препятствия. Например, в данной зоне парковки, доступное место Me для парковки указывается из парковочной рамки с предварительно определенным периодом с использованием захваченных изображений. Указанное доступное место Me для парковки отображается на дисплее 21. В следующий период, относительно места для парковки, указываемого в качестве доступного места Me для парковки, парковочная рамка не может указываться вследствие возмущений, и устройство 10 управления определяет то, что это место для парковки находится в состоянии недоступности парковки. Возмущения представляют собой шум, вызываемый посредством капель дождя, прилипших к камерам, света, отражаемого от лужи на месте для парковки, и т.д. Затем устройство 10 управления указывает парковочную рамку снова для места для парковки, которое определено как находящееся в состоянии недоступности парковки. Когда парковочная рамка может успешно указываться, устройство 10 управления определяет то, что состояние недоступности парковки отменяется.
[0120] Второй вариант осуществления
Ниже описывается система помощи при парковке согласно другому варианту осуществления настоящего изобретения. Во втором варианте осуществления, аналогично первому варианту осуществления, когда рассматриваемое транспортное средство обнаруживает препятствие в пределах рекомендованного доступного места для парковки, проводится оценка в отношении того, должно отменяться или нет состояние недоступности парковки. Другая конфигурация является идентичной конфигурации первого варианта осуществления, и описание заимствуется в данном документе.
[0121] Фиг. 11 является видом для описания примера процесса помощи при парковке согласно второму варианту осуществления. Фиг. 12 является блок-схемой последовательности операций способа, иллюстрирующей пример процедуры управления в системе помощи при парковке согласно второму варианту осуществления.
Когда рекомендованное доступное место Mr для парковки обнаруживается и отображается на дисплее 21, процесс управления, проиллюстрированный на фиг. 12, инициируется с возможностью начинаться. Последовательность операций управления, проиллюстрированная на фиг. 12, многократно выполняется с предварительно определенным периодом до тех пор, пока целевое место Mo для парковки не будет задано.
[0122] На этапе 301, аналогично этапу 201 по фиг. 9 в первом варианте осуществления, препятствие обнаруживается. Когда препятствие не обнаруживается, последовательность операций управления для этапа 201 выполняется до тех пор, пока препятствие не будет обнаружено.
[0123] На этапе 302, аналогично этапу 202 по фиг. 9 в первом варианте осуществления, устройство 10 управления определяет то, представляет или нет обнаруженное препятствие собой движущийся объект.
[0124] На этапе 303, аналогично этапу 203 по фиг. 9 в первом варианте осуществления, устройство 10 управления определяет то, должен или нет перемещаться движущийся объект, т.е. определяет вероятность перемещения движущегося объекта.
[0125] На этапе 304, аналогично этапу 204 по фиг. 9 в первом варианте осуществления, устройство 10 управления задает время ожидания.
[0126] На этапе 305, устройство 10 управления оценивает то, должно отменяться или нет состояние недоступности парковки рекомендованного доступного места Mr для парковки до того, как проходит время ожидания. Способ оценки того, должно отменяться или нет состояние недоступности парковки, включает в себя вычисление расстояния между подвижным препятствием и концом рекомендованного доступного места для парковки и вычисление скорости перемещения, ускорения при перемещении и направления перемещения препятствия. Затем оценивается то, через сколько секунд препятствие должно выходить из рекомендованного доступного места Mr для парковки (это время в дальнейшем упоминается как "оцененное время"). Оцененное время соответствует времени до тех пор, пока препятствие не выйдет из рекомендованного доступного места Mr для парковки. Когда оцененное время для препятствия находится в пределах времени ожидания, устройство 10 управления оценивает то, что состояние недоступности парковки рекомендованного доступного места Mr для парковки должно отменяться, и процедура переходит к этапу 306. С другой стороны, когда оцененное время для препятствия превышает время ожидания, устройство 10 управления оценивает то, что состояние недоступности парковки не должно отменяться, и процедура переходит к этапу 307.
[0127] Когда оценивается то, что состояние недоступности парковки должно отменяться, на этапе 306, аналогично этапу 208 по фиг. 9 в первом варианте осуществления, устройство 10 управления поддерживает форму для отображения отображаемой рамки заданного рекомендованного доступного места Mr для парковки. Таким образом, устройство 10 управления обеспечивает возможность отображения рамки рекомендованного доступного места Mr для парковки на месте для парковки, идентичном заданному рекомендованному доступному месту Mr для парковки. Через эту операцию, когда оценивается то, что состояние недоступности парковки должно отменяться, форма для отображения рекомендованного доступного места Mr для парковки на дисплее 21 поддерживается.
[0128] На этапе 307, аналогично этапу 209 по фиг. 9 в первом варианте осуществления, устройство 10 управления задает другое рекомендованное доступное место Mr для парковки, отличающееся от заданного рекомендованного доступного места Mr для парковки, и управляет дисплеем 21 таким образом, чтобы отображать другое рекомендованное доступное место Mr для парковки. Таким образом, устройство 10 управления обеспечивает возможность отображения рамки рекомендованного доступного места Mr для парковки на месте для парковки, отличающемся от заданного рекомендованного доступного места Mr для парковки.
[0129] На этапе S305, при вычислении оцененного времени, устройство 10 управления может принимать во внимание атрибут и/или размер препятствия для вычисления. Это также может применяться к случаю, в котором доступное место для парковки указывается без задания рекомендованного доступного места для парковки, и доступное место для парковки отображается.
[0130] Как описано выше, во втором варианте осуществления, указанное доступное место для парковки отображается на дисплее 21. В случае состояния недоступности парковки, которое представляет состояние, в котором рассматриваемое транспортное средство не может парковаться на доступном месте для парковки, оценивается то, что состояние недоступности парковки рекомендованного доступного места Mr для парковки должно отменяться. Когда оценивается то, что состояние недоступности парковки должно отменяться, форма для отображения рекомендованного доступного места для парковки на дисплее поддерживается. Это обеспечивает возможность представления соответствующего места для парковки водителю и пассажирам в соответствии с препятствием.
[0131] Когда препятствие присутствует на намеченном пути L движения или около намеченного пути L движения, устройство 10 управления может вычислять время для перемещения препятствия в позицию, которая не затрагивает парковку рассматриваемого транспортного средства, в качестве оцененного времени.
[0132] Последовательность операций управления от этапа 301 до этапа 307 представляет собой последовательность операций для формы для отображения рекомендованного доступного места Mr для парковки, но также может применяться к форме для отображения доступного места Me для парковки. В случае управления формой для отображения доступного места Me для парковки, когда доступное место Me для парковки обнаруживается и отображается на дисплее 21, процесс управления, проиллюстрированный на фиг. 12, инициируется с возможностью начинаться. Затем на этапе 301, устройство 10 управления обнаруживает то, присутствует или нет препятствие на доступном месте Me для парковки (вместо рекомендованного доступного места Mr для парковки) или на намеченном пути L движения. Объекты, которые должны определяться на этапах 302, 303 и 305, представляют собой препятствия, присутствующие на доступном месте Me для парковки и на намеченном пути L движения.
Описание позиционных обозначений
[0133] 1000 - система помощи при парковке
100 - устройство помощи при парковке
10 - устройство управления
11 - CPU
12 - ROM
13 - RAM
20 - устройство вывода
21 - дисплей
22 - динамик
23 - лампа
1a-1d - бортовые камеры
2 - устройство обработки изображений
3 - устройство измерения дальности
30 - контроллер транспортного средства
40 - приводная система
50 - датчик угла поворота при рулении
60 - датчик скорости транспортного средства
V - транспортное средство
Me - доступное место для парковки
Mr - рекомендованное доступное место для парковки
Mo - целевое место для парковки



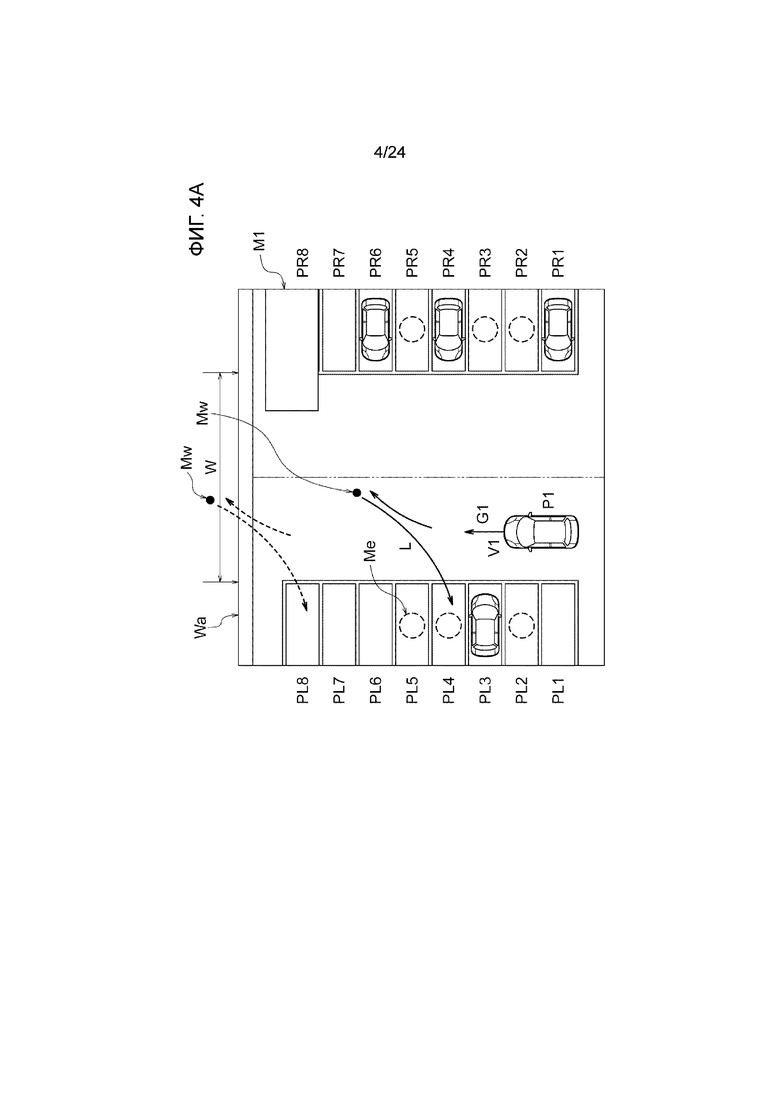

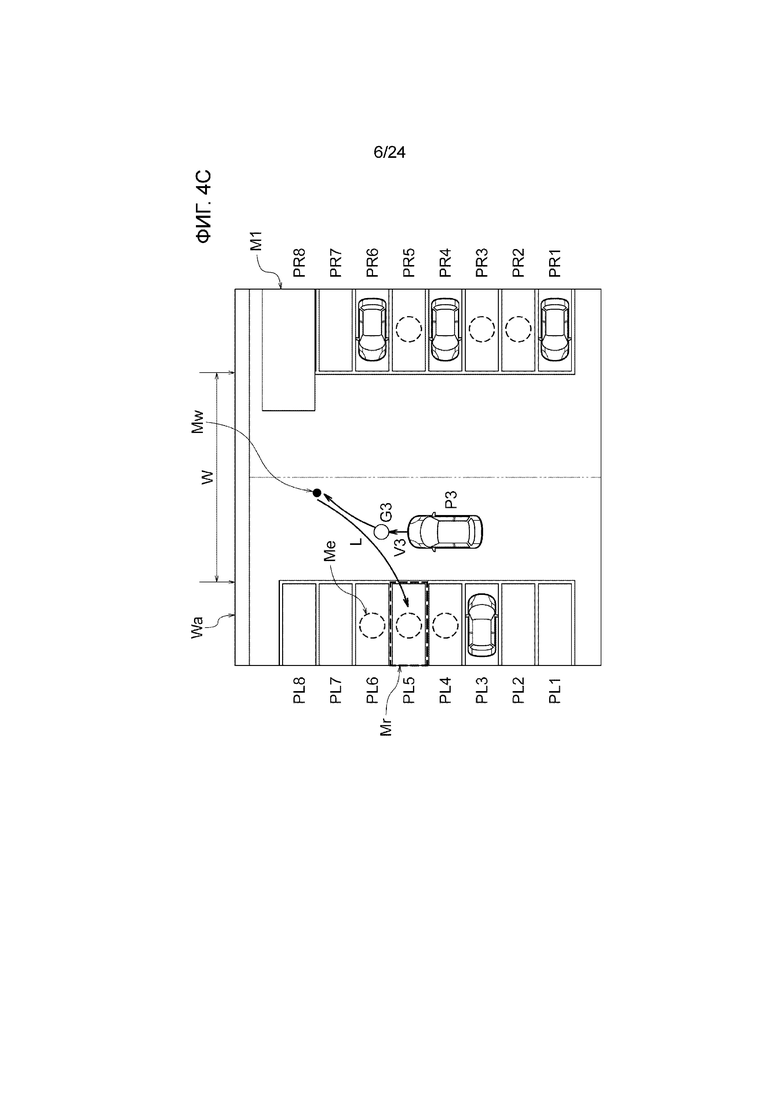







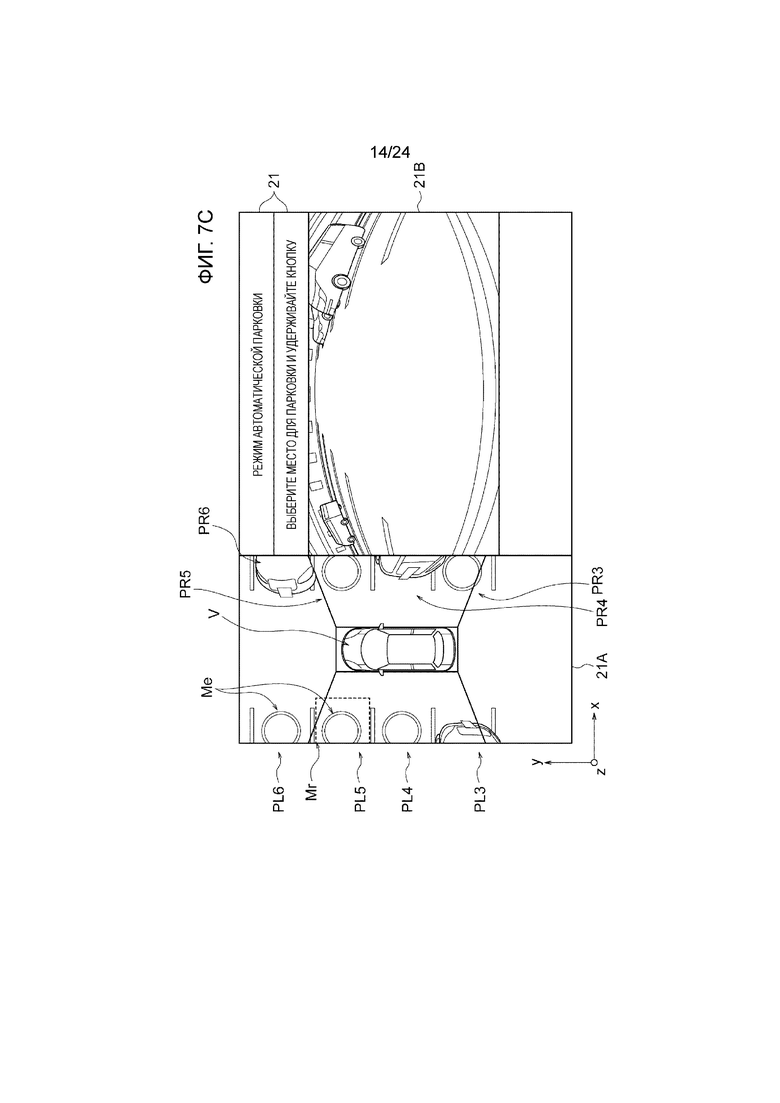







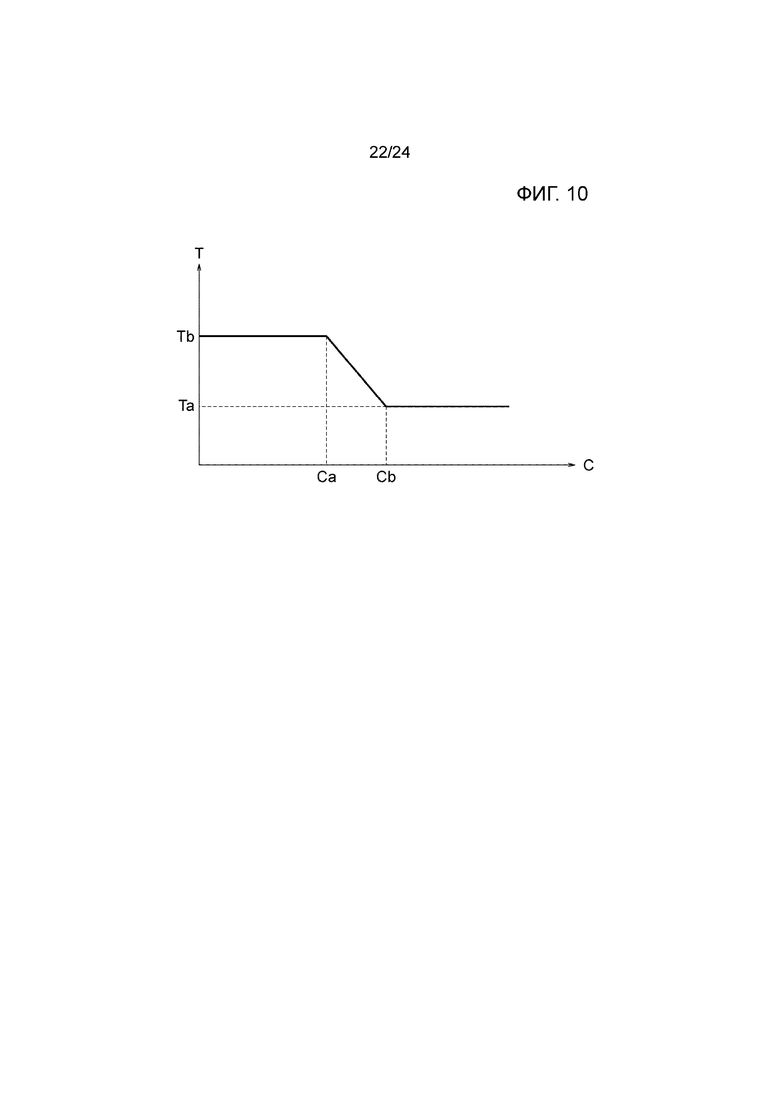


Группа изобретений относится к способу помощи при парковке и устройству помощи при парковке. Способ помощи при парковке, осуществляющийся устройством помощи при парковке, включает шаги, на которых указывают доступное место для парковки, на котором может парковаться рассматриваемое транспортное средство. Отображают доступное место для парковки на дисплее. Когда доступное место для парковки находится в состоянии недоступности парковки, которое представляет состояние, в котором рассматриваемое транспортное средство не может парковаться на доступном месте для парковки, определяют, отменяется или нет состояние недоступности парковки. Когда состояние недоступности парковки отменяется до того, как проходит первое время, поддерживают формы для отображения доступного места для парковки на дисплее. Обеспечивается представление доступного парковочного места водителю и пассажирам в соответствии с препятствием. 2 н. и 10 з.п. ф-лы, 24 ил.
1. Способ помощи при парковке для помощи в парковке рассматриваемого транспортного средства с использованием устройства помощи при парковке, содержащего контроллер, который направляет рассматриваемое транспортное средство на место для парковки, и дисплей, который отображает место для парковки, при этом способ помощи при парковке содержит этапы, на которых:
указывают доступное место для парковки, на котором может парковаться рассматриваемое транспортное средство;
отображают доступное место для парковки на дисплее в форме для отображения, которая представляет то, что парковка возможна;
обнаруживают состояние доступного места для парковки или состояние намеченного пути движения для рассматриваемого транспортного средства;
определяют то, переходит или нет доступное место для парковки в состояние, в котором парковка возможна до того, как проходит первое время, на основе обнаруженного состояния доступного места для парковки или обнаруженного состояния намеченного пути движения для рассматриваемого транспортного средства; и
когда доступное место для парковки переходит в состояние, в котором парковка возможна, поддерживают, на дисплее, форму для отображения, представляющую то, что парковка возможна.
2. Способ помощи при парковке по п. 1, в котором выполняется определение в отношении того, отменяется или нет состояние недоступности парковки доступного места для парковки до того, как проходит первое время, и когда состояние недоступности парковки доступного места для парковки отменяется, выполняется определение в отношении того, что доступное место для парковки переходит в состояние, в котором парковка возможна до того, как проходит первое время.
3. Способ помощи при парковке по п. 2, содержащий этап, на котором:
когда доступное место для парковки не переходит в состояние, в котором парковка возможна до того, как проходит первое время, изменяют форму для отображения доступного места для парковки на дисплее.
4. Способ помощи при парковке по п. 1, содержащий этапы, на которых:
когда доступное место для парковки не переходит в состояние, в котором парковка возможна до того, как проходит первое время, задают другое доступное место для парковки, отличающееся от доступного места для парковки, отображаемого на дисплее; и
отображают другое доступное место для парковки на дисплее.
5. Способ помощи при парковке по п. 4, содержащий этапы, на которых:
вычисляют требуемое время для парковки, когда рассматриваемое транспортное средство паркуется на доступном месте для парковки посредством автоматизированного управления с помощью контроллера, причем требуемое время для парковки вычисляется для каждого из множества доступных мест для парковки; и
задают доступное место для парковки, для которого требуемое время для парковки меньше предварительно определенного времени, из множества доступных мест для парковки, в качестве другого доступного места для парковки.
6. Способ помощи при парковке по п. 1, содержащий этапы, на которых:
обнаруживают атрибут препятствия; и
задают первое время в соответствии с атрибутом.
7. Способ помощи при парковке по п. 1, содержащий этапы, на которых:
определяют размер препятствия; и
задают первое время в соответствии с размером.
8. Способ помощи при парковке по п. 1, содержащий этапы, на которых:
задают доступное место для парковки, отображаемое на дисплее, в качестве целевого места для парковки для рассматриваемого транспортного средства на основе операции водителем или пассажиром рассматриваемого транспортного средства;
отображают целевое место для парковки на дисплее;
обнаруживают то, находится или нет целевое место для парковки в состоянии недоступности парковки, которое представляет состояние, в котором рассматриваемое транспортное средство не может парковаться на целевом месте для парковки;
обнаруживают то, отменяется или нет состояние недоступности парковки по мере того, как препятствие перемещается до того, как проходит второе время; и
когда состояние недоступности парковки отменяется до того, как проходит второе время, поддерживают форму для отображения целевого места для парковки на дисплее.
9. Способ помощи при парковке по п. 1, в котором доступное место для парковки представляет собой рекомендованное доступное место для парковки из доступных мест для парковки, на которых может парковаться рассматриваемое транспортное средство, при этом рекомендованное доступное место для парковки является подходящим для парковки рассматриваемого транспортного средства в соответствии с состоянием движения рассматриваемого транспортного средства.
10. Способ помощи при парковке по п. 1, в котором когда доступное место для парковки переходит в состояние, в котором парковка возможна, доступное место для парковки поддерживается с возможностью отображаться на дисплее.
11. Способ помощи при парковке по любому из пп. 1-10, в котором:
состояние доступного места для парковки или состояние намеченного пути движения для рассматриваемого транспортного средства обнаруживается до начала автоматизированного вождения, которое паркует рассматриваемое транспортное средство на доступном месте для парковки, и
выполняется определение в отношении того, переходит или нет доступное место для парковки в состояние, в котором парковка возможна до того, как проходит первое время, на основе обнаруженного состояния доступного места для парковки или обнаруженного состояния намеченного пути движения для рассматриваемого транспортного средства, при этом определение выполняется до начала автоматизированного вождения.
12. Устройство помощи при парковке, содержащее:
дисплей, который отображает место для парковки; и
контроллер, который направляет рассматриваемое транспортное средство на место для парковки,
причем контроллер:
указывает доступное место для парковки, на котором может парковаться рассматриваемое транспортное средство;
обнаруживает состояние доступного места для парковки или состояние намеченного пути движения для рассматриваемого транспортного средства;
определяет то, переходит или нет доступное место для парковки в состояние, в котором парковка возможна до того, как проходит первое время, на основе обнаруженного состояния доступного места для парковки или обнаруженного состояния намеченного пути движения для рассматриваемого транспортного средства; и
когда доступное место для парковки переходит в состояние, в котором парковка возможна, поддерживает форму для отображения доступного места для парковки на дисплее.
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ПОМОЩИ ВОДИТЕЛЮ ТРАНСПОРТНОГО СРЕДСТВА ПРИ ПАРКОВКЕ | 2009 |
|
RU2529078C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ДИСПЛЕЯ ПАРКОВОЧНОГО УСТРОЙСТВА И СПОСОБ ОТОБРАЖЕНИЯ | 2008 |
|
RU2468944C2 |
| Устройство для автоматического поддержания колебательного движения часовой системы баланс - спираль | 1950 |
|
SU97312A1 |
| CN 101878494 B, 26.06.2013 | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |

