Настоящее изобретение относится к устройствам безопасности, в частности - к устройствам сигнализации для коляски.
Из патента РФ №2643339 известно устройство сигнализации для коляски, которое содержит: измерительный модуль, настроенный для измерения давления коляски с помощью датчика давления; модуль обнаружения, настроенный для определения того, существует ли в пределах заданного расстояния сопряженный с коляской терминал, когда значение давления, полученное измерительным модулем, снижается до заданного диапазона давления; и модуль сигнализации, настроенный для включения сигнализации в случае, если сопряженного терминала не обнаружено. Модуль обнаружения содержит первый подмодуль обнаружения, настроенный для определения того, существует ли сопряженный с коляской терминал в пределах заданного расстояния, когда первое значение давления коляски снижается до первого заданного диапазона давления, при этом первый диапазон давления соответствует диапазону первого датчика давления и сопоставляется с массой лица или предмета, находящегося в коляске.
По другому варианту изобретения по патенту РФ №2643339 устройство сигнализации для коляски, характеризуется тем, что содержит: процессор; и память, настроенную для хранения команды, исполняемой процессором, где процессор настроен для: измерения значения давления коляски с помощью датчика давления; определения того, существует ли сопряженный с коляской терминал в пределах заданного расстояния, когда значение давления, полученное измерительным модулем, снижается до заданного диапазона давления; и включения сигнализации в случае, если сопряженного терминала не обнаружено.
Недостатком устройства по патенту РФ №2643339 является его сложность, ограниченные функциональные возможности.
Из патента № CN 104554414 на изобретение известна безопасная детская тележка с самоторможением, согласно которому - когда руки человека, управляющего детской коляской, отрываются от ручки коляски, коляска немедленно начинает тормозить и останавливается. Коляска имеет возможность двигаться вперед, пока человек, управляющий коляской, удерживает переключатель давления на ручке коляски. При этом детская тележка всегда находится в состоянии торможения, если лицо, управляющее коляской, не удерживает переключатель давления на ручке коляски, невзирая на то, что детская тележка находится на плоской земле или на склоне. Таким образом обеспечивается безопасность ребенка, находящегося в коляске.
Недостатком коляски по патенту №. CN 104554414 является то, что при ее использовании не будет обеспечено комфортное состояние ребенка в коляске, поскольку коляска может начать тормозить при изменении давления руки человека на датчик, при этом движение коляски будет прерывистым и неравномерным, сложность устройства и ограниченные функциональные возможности.
Из заявки № KR 20170031933 на изобретение известна детская коляска с автоматическим управлением, которая включает в себя: сиденье, в котором ребенок может сидеть или лежать; раму, поддерживающую сиденье, содержащую захват в верхней части и колеса в нижней части; несколько ультразвуковых датчиков, передающих ультразвуковой сигнал с пользовательским терминалом; управляющая часть, генерирующая управляющий сигнал для работы колес в ответ на ультразвуковой сигнал, принятый от пользовательского терминала; и рабочую часть, обеспечивающую вращательное усилие к колесам в ответ на управляющий сигнал, и определение того, следует ли тормозить или нет. Ультразвуковой сигнал, испускаемый из пользовательского терминала, согласовывается с заданным ультразвуковым сигналом, при этом обеспечивается безопасный режим движения в зависимости от запрограммированных ситуаций, в том числе в зависимости от расстояния между управляющей частью, расположенной на коляске, и пользовательским терминалом, связанным с лицом, управляющим коляской.
Недостатком коляски по заявке № KR 20170031933 на изобретение является ее сложность из-за наличия механических элементов, снижающих при этом надежность и эксплуатационные качества коляски, ограниченные функциональные возможности.
Техническая проблема, решаемая настоящим изобретением - создание надежной, информативной системы сигнализации для обеспечения безопасности ребенка находящегося в детской коляски, а также человека находящегося в инвалидной коляске.
Технический результат, достигаемый предлагаемым изобретением - расширение функциональных возможностей за счет обеспечения максимальной информативности о состоянии коляски; обеспечение универсальности устройства за счет его возможности использовать на различных колясках; упрощение конструкции устройства сигнализации для коляски, легкость установки, удобство в эксплуатации, надежность устройства.
Заявляемый технический результат достигается за счет того, что в устройстве сигнализации для коляски, содержащем микропроцессор, датчик расстояния, предназначенный для срабатывания при превышении расстояния между устройством и лицом, управляющим коляской, заданного критического расстояния, датчик измерения наклона коляски относительно горизонтального уровня, предназначенный для срабатывания при каждом отклонении угла наклона коляски от горизонтального уровня, световой и звуковой сигнализаторы, выходы датчиков соединены с соответствующими входами микропроцессора, а входы светового и звукового сигнализаторов соединены с соответствующими выходами микропроцессора, все элементы устройства расположены и закреплены относительно друг друга в пыле- и влагозащищенном корпусе, снабженном средством жесткой фиксации на рукоятке коляски, световой сигнализатор выполнен в виде дисплея или цветных индикаторов, при этом световой сигнализатор предназначен для формирования выходного сигнала разного цвета в зависимости от положения и состояния коляски и установлен с возможностью его визуального восприятия, звуковой сигнализатор выполнен с возможностью формирования узконаправленной звуковой волны и предназначен для формирования выходного сигнала в зависимости от положения и состояния коляски, световой и звуковой сигнализаторы размещены в корпусе с возможностью восприятия их сигналов лицом, управляющим коляской, микропроцессор предназначен для восприятия сигналов с выходов датчика расстояния и датчика измерения наклона коляски и формирования сигналов, направляемых на световой и звуковой сигнализаторы для информирования лица, управляющего коляской о состоянии и положении коляски, также микропроцессор предназначен для фиксирования движения коляски при поступлении на его вход в течение двух секунд не менее, чем двух сигналов с выхода датчика измерения наклона коляски относительно горизонтального уровня.
Устройство может быть дополнительно снабжено датчиком внешней освещенности, выход которого соединен с соответствующим входом микропроцессора.
Датчик расстояния может быть выполнен в виде ультразвукового датчика.
Датчик измерения наклона коляски может быть выполнен в виде гироскопа - акселерометра.
Звуковой сигнализатор может быть выполнен в виде биморфного динамика.
Заявляемое устройство решает проблему непредвиденно укатывающихся - под воздействием уклона поверхности и других факторов - колясок (детских или инвалидных, управляемых человеком) и возможного риска от этого для лица, находящегося в коляске и вне ее. Несмотря на то, что детские или инвалидные коляски, как правило, оборудованы тормозом, препятствующим их самостоятельному перемещению, тем не менее, нередко его не используют по причине незнания о наличии уклона, возможных порывов ветра, а также спешки, забывчивости и возможного предубеждения об отсутствии уклона поверхности на очередном месте остановки коляски.
В заявляемом устройстве осуществляется световое и/или звуковое оповещение лица, управляющего коляской, о наличии уклона поверхности на пути перемещения и остановок коляски, а также - в случае отсутствия рядом управляющего коляской человека - и о факте непредвиденного начала движения коляски.
Устройство содержит датчик, реагирующий на «присутствие человека», а именно: ультразвуковой датчик расстояния, электрически связанный со световым и/или звуковым сигнализатором, а также с цветным дисплеем/индикатором. Датчик расстояния, работающий по принципу бесконтактного измерения расстояния между датчиком и контролируемым объектом (человеком, управляющим коляской), срабатывает (на выходе появляется сигнал) при превышении выставленного критического расстояния между датчиком и контролируемым объектом, при этом датчик может быть выполнен ультразвуковым или иным, обеспечивающим бесконтактное измерение (например, датчик типа НС sr04, Промситех).
Устройство содержит датчик, измеряющий значение наклона коляски относительно горизонтальной поверхности. В качестве такого датчика может использоваться гироскоп-акселерометр.
Наличие или отсутствие наклона коляски будет фиксироваться датчиком наклона коляски. При этом наклон коляски будет фиксироваться как при нахождении коляски на уклоне, так и при движении коляски по практически ровной поверхности, поскольку при движении угол ее наклона будет периодически изменяться в силу того, что дорог с идеально ровной, гладкой поверхностью не существует. Датчик наклона находится в постоянном режиме считывания положения коляски относительно горизонтали, поэтому даже в случае движения коляски по горизонтальной поверхности микропроцессор будет фиксировать минимальные изменения положения коляски, ввиду того, что идеально ровной поверхности не существует; это в свою очередь обеспечивает возможность фиксации микропроцессором наличие или отсутствие движения коляски.
Интенсивность выходных сигналов обоих сигнализаторов может регулироваться для того, чтобы иметь возможность учесть окружающую обстановку, психофизические характеристики лица, управляющего коляской и лица, находящегося в коляске
Устройство снабжено звуковым сигнализатором. При этом, для того, чтобы исключить воздействие резкого звука на лицо, находящееся в коляске, звуковой сигнализатор должен формировать направленную звуковую волну от объекта находящегося в коляске. В качестве такого звукового сигнализатора, формирующего направленный звук, может использоваться, например, биморфный динамик.
Устройство снабжено световым сигнализатором, который может быть выполнен или в виде дисплея, или в виде иных световых индикаторов (набор цветных лампочек, светодиодов и т.п.).
Все элементы устройства размещены в его пыле и влагозащищенном корпусе, в котором выполнен отсек для сменяемых батарей или разъем для сетевого адаптера для зарядки перезаряжаемых батарей устройства. Корпус снабжен средством крепления к рукоятке коляски таким образом, чтобы звуковой и световой сигнализаторы были обращены к лицу, управляющему коляской. Корпус снабжен крепежными элементами, обеспечивающими жесткую фиксацию положения устройства на рукоятке коляски.
Все датчики, звуковой сигнализатор и цветной дисплей/индикатор электрически связаны с микропроцессором, с помощью которого реализуется работа устройства и управление его работой (включение/выключение; регулировка яркости и т.п.) посредством кнопок управления, выведенных на наружную панель корпуса.
Микропроцессор предназначен для фиксирования расстояния между датчиком расстояния и контролируемым объектом по сигналу, получаемому от датчика расстояния, и формирования сигналов, направляемых на световой и звуковой сигнализаторы при превышении заданного критического значения между датчиком расстояния и контролируемым объектом, означающего, что контролируемый объект (лицо, управляющее коляской) удалился от коляски и не контролирует ее состояние и положение.
Микропроцессор предназначен также для фиксирования угла наклона коляски относительно горизонтали по сигналу, получаемому от датчика, измеряющего угол наклона коляски, и формирования сигналов, направляемых на световой и звуковой сигнализаторы.
Также микропроцессор предназначен для фиксирования начала движения коляски в случае поступления с датчика измерения угла наклона коляски не менее двух сигналов в течение двух секунд.
Срабатывание звукового и светового сигнализаторов происходит в зависимости от соответствующих настроек микропроцессора, например:
1. Микропроцессор получает информацию с датчика наклона о наличии или отсутствии уклона поверхности по пути следования человека и коляски и в местах их остановки.
При отсутствии уклона поверхности, микропроцессор выводит на дисплей/индикатор световую индикацию об отсутствии уклона (зеленый цвет дисплея), а при наличии уклона (хотя бы в 1 градус) - выводится индикация о наличии уклона (красный цвет дисплея).
2. Микропроцессор получает информацию с датчика расстояния о наличии или отсутствии человека в пределах 50 см от закрепленного прибора на рукоятке управления коляской.
(а) Микропроцессор дает сигнал на звуковой динамик при выходе контролируемого объекта (человека управляющего коляской) за пределы 50 см и при этом наличии уклона поверхности, получаемого с датчика наклона.
(б) Микропроцессор не дает сигнала на звуковой динамик при выходе контролируемого объекта (человека управляющего коляской) за пределы 50 см (информация с датчика расстояния) и при отсутствии уклона поверхности (информация с датчика наклона).
3. Микропроцессор получает информацию с датчика наклона о наличии(начале) или отсутствии(прекращении) движения коляски, когда получаемая микропроцессором частота сигналов с датчика наклона два и более сигнала за две секунды.
Микропроцессор дает сигнал на звуковой динамик при начале движения коляски и отсутствии/выходе контролируемого объекта (человека управляющего коляской) за пределы 50 см (информация с датчика расстояния). В этом случае, информация получаемая микропроцессором о наличии или отсутствие уклона поверхности с датчика наклона, значения не имеет и микропроцессором не учитывается.
Таким образом, работа устройства обеспечивается за счет контроля, фиксации и индикации следующих параметров:
- расстояния от устройства до контролируемого объекта, в качестве которого выступает лицо, управляющее коляской, - посредством датчика расстояния;
- угла наклона коляски относительно горизонтали - посредством датчика, измеряющего угол наклона коляски относительно горизонтали;
- контроль микропроцессором периодичности сигналов с датчика угла наклона -два и более сигналов в течение двух секунд.
В заявляемом устройстве для фиксации факта движения коляски или его отсутствия не требуется использования отдельных датчиков или иных специальных средств. Фиксация факта движения обеспечивается микропроцессором в случае поступления на его вход двух и более сигналов с датчика, измеряющего наклон коляски относительно горизонтали, в течение двух секунд.
Состав конструктивных элементов и выполняемые ими функции заявляемого устройства позволяет обеспечить эффективную и оперативную информативность о состоянии и положении коляски, позволяет обеспечить привлечение внимание лица, управляющего коляской в случае возникновения опасных ситуаций, а также для предупреждения таких ситуаций.
Заявляемое устройство является съемным, компактным и надежным по конструкции. Простота конструкции достигается за счет отсутствия подвижных механических узлов и того, что одними и теми же средствами (микропроцессор и датчик, измеряющий наклон коляски относительно горизонтали) обеспечивается измерения и фиксация двух параметров - нахождение коляски на уклоне, а также факта движения коляски.
Надежность устройства обеспечивается размещением всех конструктивных элементов в пыле- и влагозащищенном корпусе, жестким фиксированием устройства на рукоятке коляски с тем, чтобы исключить изменение положения устройства относительно лица, управляющего коляской, а также за счет отсутствия взаимодействующих между собой механических элементов конструкции (за исключением крепежных элементов).
Универсальность устройства обеспечивается тем, что оно может быть использовано на колясках различных конструкций, в том числе, на детских колясках, инвалидных колясках, управляемых человеком.
Расширение функциональных возможностей достигается за счет оперативной и полной информативности устройства, позволяющего максимально предупредить опасные ситуации, а при их возникновении - в максимально короткие сроки устранить такую опасную ситуацию.
Для большего комфорта лица, управляющего коляской, устройство может быть снабжено датчиком внешней освещенности с тем, чтобы автоматически менять яркость светового сигнализатора в зависимости от внешней освещенности.
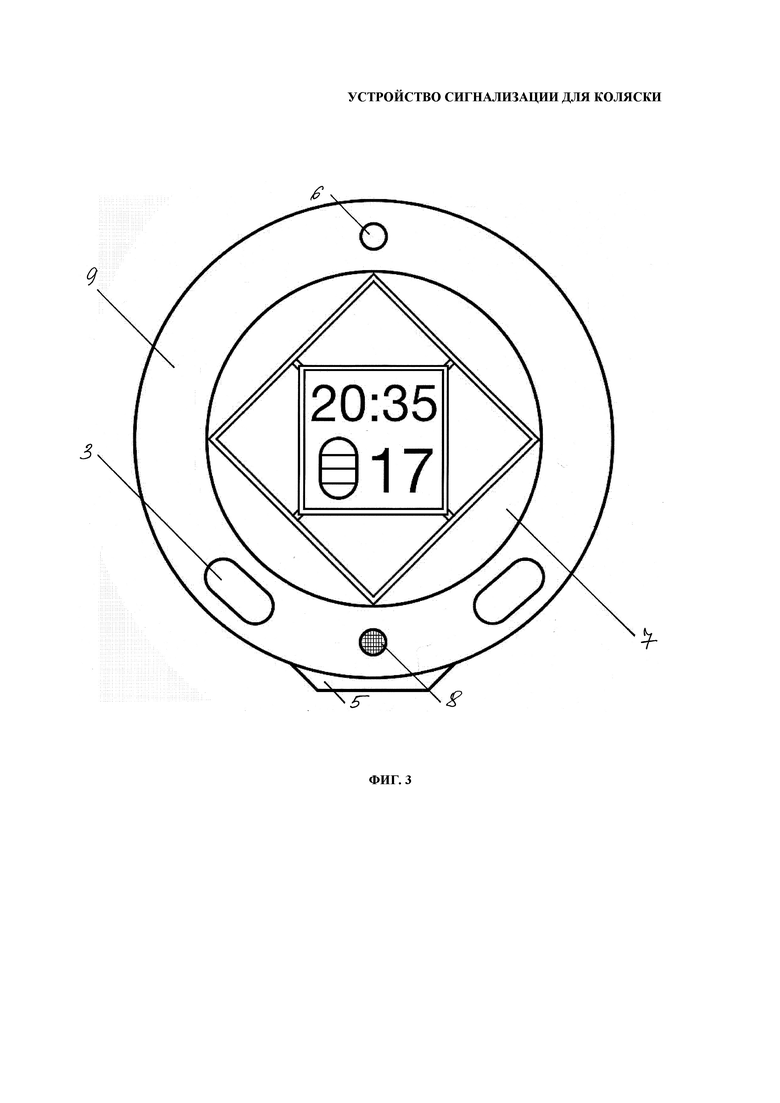
На фиг. 1 изображена блок-схема заявляемого устройства.
На фиг. 2 изображен разрез заявляемого устройства.
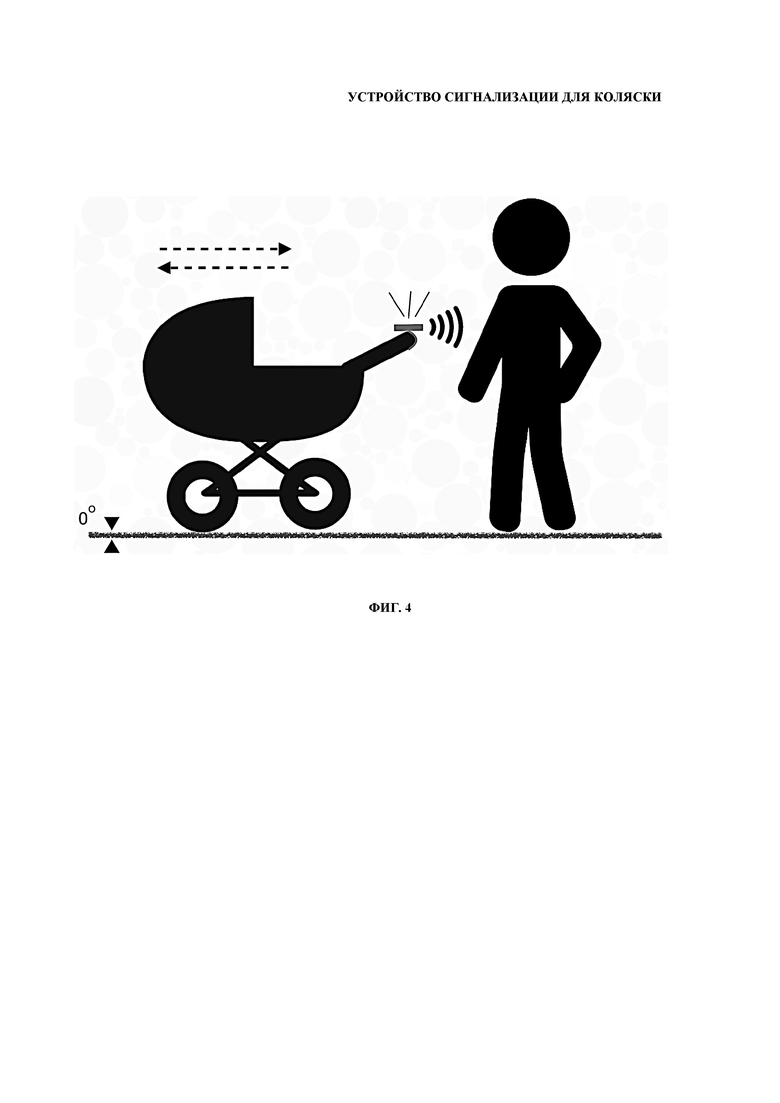
На фиг. 3 изображен фасад (лицевая часть) заявляемого устройства с дисплеем.
На фиг. 4 изображена коляска с заявляемым устройством.
На фиг. 5 изображен вариант крепления устройства к рукоятке коляске.
Блок схема устройства на фиг. 1 содержит:
1 - микропроцессор;
2 - элемент питания устройства (батарея);
3 - органы управления устройством (управляющие кнопки);
4 - Гироскоп - акселерометр (датчик наклона коляски относительно горизонтали);
5 - датчик расстояния;
6 - датчик внешней освещенности;
7 - световой сигнализатор (дисплей);
8 - звуковой сигнализатор (например, биморфный динамик).
В качестве микропроцессора может использоваться микроконтроллер PIC18F252-I/так PIC18F252 18F252 СОП 28/40-pin, представленный в сети Интернет:
https://ru.aliexpress.com/item/PIC18F252-I-PIC18F252-18F252-28-40-pin/32875460731. html?spm=a2g0v.search0204.3.21.22855c12qfPQyn&s=p&ws_ab_test=searchweb0 _0,searchweb201602_5_10065_5920015_10068_5910015_5890015_10696_5940015_10084 _5724015_10083_5970015_10618_5723515_5724315_10307_10301_5724215_5724115 _5930015_10059_5724415_100031_5725015_10103_5725115_5980015_5724915_5990015 _5900016_5724815,searchweb201603_54,ppcSwitch_5_ppcChannel&priceBeautifyAB=0
В качестве звукового сигнализатора может использоваться, например, биморфный динамик, или пассивный зуммер АС 12 мм * 8.5 мм 12085 16R, представленный в сети Интернет:
https://ru.aliexpress.com/item/10-AC-12-8-5-12085-16R/32503620431.html?spm=a2g0v.search0204.3.69.238972821YFW4Z&s=p&ws_ab_ test=searchweb0_0,searchweb201602_5_10065_5920015_10068_5910015_5890015_10696_ 5940015_10084_5724015_10083_5970015_10618_5723515_5724315_10307_10301_5724215_ 5724115_5930015_10059_5724415_100031_5725015_10103_5725115_5980015_5724915_ 5990015_5900016_5724815,searchweb201603_54,ppcSwitch_5_ppcChannel&priceBeautifvAB=0
В качестве датчика, измеряющего наклон коляски относительно горизонтали может использоваться гироскоп-акселерометр IIC/I2C GY-273 HMC5883L, представленный в сети Интернет: https://ru.aliexpress.com/item/3V-5V-HMC5883L-Triple-Axis-Compass-Magnetometer- Sensor-Module-For-Ar/2035918232.html?spm=a2g0v.10010108.1000014.2.4927256cIIGH1M&gps- id=pcDetailBottomMoreOtherSeller&scm=1007.13338.108277.000000000000000&scm_ id=1007.13338.108277.000000000000000&scm-url=1007.13338.108277.000000000000000&pvid= d306340d-92b8-48b2-9573-7f3953a831d6
В качестве датчика расстояния может использоваться ультразвуковой датчик Cnikesin трансивер диаметром 16 мм и частотой 40 кГц, представленный в сети Интернет: https://ru.aliexpress.com/item/Transceiver-integrated-16mm-40KHz-Ultrasonic-Sensor-waterproof- type-Ultrasonic-module/32561790166.html?spm=a2g0v.search0204.3.209.741511b9uh1b0k&ws_ab_ test=searchweb0_0,searchweb201602_5_10065_5920015_10068_5910015_5890015_10696_5940015 _10084_5724015_10083_5970015_10618_5723515_5724315_10307_10301_5724215_5724115_ 5930015_10059_5724415_100031_5725015_10103_5725115_5980015_5724915_5990015_ 5900016_5724815,searchweb201603_54,ppcSwitch_5_ppcChannel&algo_expid=dcde8d57-43d4- 498a-9273-87f4c5a6a0be-8&algo_pvid=dcde8d57-43d4-498a-9273-87f4c5a6a0be&priceBeautifyAB=0
В качестве датчика освещенности может использоваться универсальный фоторезистор, представленный в сети Интернет: https://ru.aliexpress.com/item/50pcs-5mm-5800B-Universal-Photoresistor-Light-Dependent-Resistance-Resistor-For-Optoelectronic-Switch-Components/32779059165.html?spm=a2g0v.search0204.3.189.12d7434dBFP8Qc&ws_ab_ test=searchweb0_0,searchweb201602_5_10065_5920015_10068_5910015_5890015_10696_ 5940015_10084_5724015_10083_5970015_5723516_10618_5724315_10307_10301_5724215_ 5724115_5930015_10059_5724415_100031_5725015_10103_5725115_5980015_5724915_ 5990015_5900016_5724815,searchweb201603_54,ppcSwitch_5_ppcChannel&algo_expid=afdc8fdf- 7239-40ab-8ea8-0a7fe59c3263-18&algo_pvid=afdc8fdf-7239-40ab-8ea8-0a7fe59c3263&priceBeautifyAB=0
На фиг. 2 изображен разрез устройства, содержащего следующие конструктивные элементы:
1 - микропроцессор;
2 - элемент питания устройства (батарея);
3 - органы управления устройством (управляющие кнопки);
4 - гироскоп - акселерометр (датчик наклона коляски относительно горизонтали);
5 - датчик расстояния;
6 - датчик внешней освещенности;
7 - световой сигнализатор (дисплей);
8 - звуковой сигнализатор;
9 - корпус устройства пыле и влагозащищенный;
10 - рукоятка коляски;
12 - тело кронштейна-крепежа;
13 - стопор-фиксатор для фиксации на кронштейне-крепеже корпуса устройства;
14 - выступающие направляющие для установки корпуса устройства;
15 - выемки - направляющие;
16 - разъем для подзарядки аккумуляторных батарей.
Выходы датчиков 4, 5 и 6 связаны с соответствующими входами микропроцессора 1 с тем, чтобы обеспечить обработку сигналов с этих датчиков посредством микропроцессора 1.
Сигнализаторы 7 и 8 связаны с соответствующими выходами микропроцессора 1, который вырабатывает команду на срабатывание этих сигнализаторов (по одному или совместно) по результатам обработки сигналов, поступивших с датчиков 4, 5 и 6.
Световой сигнализатор обеспечивает информирование контролируемого объекта (лица, управляющего коляской) световым сигналом различного цвета (например, красный - опасность; зеленый - спокойно).
Звуковой сигнализатор издает звук в случае опасного состояния коляски ((а) остановки коляски на поверхности с уклоном при условии последующего выхода человека управляющего коляской из зоны действия датчика растояния и (б) начала движения коляски с отсутствием рядом человека управляющего коляской).
На фиг. 3 изображена лицевая часть устройства, содержащая:
3 - органы управления устройством (управляющие кнопки);
5 - датчик расстояния;
6 - датчик внешней освещенности;
7 - световой сигнализатор (дисплей);
8 - звуковой сигнализатор (например, биморфный динамик);
9 - корпус устройства пыле и влагозащищенный.
На фиг. 4 показано взаимное расположение устройства, закрепленного на коляске и контролируемого объекта - лица, управляющего коляской.
На фиг. 5 показан вариант крепления устройства к рукоятке коляски, содержащего:
11 - зажим тела кронштейна-крепежа на рукоятке коляски;
12 - тело кронштейна-крепежа;
13 - стопор-фиксатор для фиксации на кронштейне-крепеже корпуса устройства;
14 - выступающие направляющие для установки корпуса устройства.
Заявляемое устройство работает следующим образом.
Устройство крепится к детской коляске на заранее закрепленный к ней кронштейн-крепеж, например, как на фиг. 5, установленный на ручке управления коляской. Устройство имеет на своем корпусе выемки-направляющие 15. Кронштейн-крепеж, закрепляемый на детской коляске, имеет выступающие направляющие 14 и подпружиненый стопор-фиксатор 13. Направляющие устройства и кронштейна-крепежа совмещаются друг с другом, выступающие-направляющие 14 кронштейна-крепежа входят в выемки-направляющие устройства за счет чего происходит их фиксация. Подпружиненный стопор-фиксатор 13 кронштейна-крепежа препятствует их самопроизвольному рассоединению. Отсоединение устройства от кронштейна-крепежа для снятия его с коляски происходит после нажатия человеком на стопор-фиксатор 13 и разъединения направляющих в обратном (в сравнении с их фиксацией) направлении. Устройство может крепиться на детскую коляску и другим надежным и удобным для человека образом.
Для возможности автономного функционирования устройства, оно снабжается элементами питания 2 (например, сменной батареей, перезаряжаемой встроенной батареей, солнечной батареей). После закрепления устройства на рукоятке коляски, его включают в работу кнопками управления 3. Далее устройство находится в рабочем состоянии до его выключения кнопками управления 3. В процессе функционирования устройства гироскоп-акселерометр 4 определяет угол наклона коляски и передает сигнал на вход микропроцессора 1. Датчик 5 измеряет расстояние от устройства до контролируемого объекта и передает сигнал на вход микропроцессора 1.
Микропроцессор 1 обрабатывает сигналы с датчиков 4, 5, 6 и выдает соответствующие команды на сигнализаторы 7 и 8.
Наиболее опасной является ситуация, при которой на вход микропроцессора поступает сигнал с датчика 5 расстояния (т.е. лицо, управляющее коляской, отсутствует рядом с ней), при этом микропроцессор 1 фиксирует в течение 2 секунд два и более поступивших сигнала с датчика 4, свидетельствующих о движении коляски. При такой ситуации микропроцессор 1 вырабатывает команды на срабатывание как светового сигнализатора 7 (горит красным), так и срабатывание звукового сигнализатора 8 (издает направленный звук в сторону лица, управляющего коляской).
По результатам срабатывания светового и звукового сигнализаторов, лицо, управляющее коляской вернется к ее управлению предотвратив опасную ситуацию.
Следует отметить, что существуют другие возможности для фиксации движения коляски, которые ведут к усложнению конструкции устройства, снижению его надежности и эксплуатационных качеств, например такие, как приведенные ниже.
Наличие (начало) и отсутствие (прекращение) движения коляски может быть реализовано также на принципе излучения и улавливания, датчиком волн различных типов (звуковых, световых, электромагнитных и т.п.) с последующим анализом характера их изменения. Принцип работы такого типа датчиков в случае их применения на описываемом устройстве: датчик устанавливается в нижней части устройства и направляется на поверхность, по которой движется коляска. Так как движение коляски сопровождается изменением характера поверхности (рельефа, уклона и др.), по которой она передвигается, то посылаемые датчиком волны на эту поверхность будут преломляться. Факт и характер преломления фиксируется микропроцессором, позволяя определять наличие или отсутствие движения коляски и, при необходимости, другие изменяющиеся параметры поверхности. Недостатком такого решения является усложнение конструкции за счет применения дополнительного датчика, увеличение энергопотребление за счет необходимости в энергопитании дополнительного датчика, а также и возможные сложности для конечного потребителя, вызванные ограничениями крепления описываемого устройства на коляску, в виду необходимости направить излучающий лучи датчик именно на поверхность, по которой передвигается коляска, избегая при этом возможных препятствий на пути излучения датчика, которыми могут являться корпус и детали конструкции самой коляски, находящиеся на пути лучей испускаемых датчиком на поверхность, по которой передвигается коляска.
Также для определения факта наличия(начала) и отсутствия(прекращения) движения может быть использован датчик вибраций. Принцип работы такого датчика в случае его использования на описываемом устройстве: датчик вибраций устанавливается внутри корпуса устройства. Датчик вибраций улавливает микро-вибрации нормально возникающие при наличии движения коляски. Фиксация микропроцессором поступающих с датчика вибраций непрерывных вибраций в течение двух секунд, воспринимается микропроцессором, как наличие движения. Отсутствие же непрерывных вибраций в течение двух секунд - как отсутствие движения коляски. Недостатком применения такого решения является усложнение конструкции за счет применения дополнительного датчика, увеличение энергопотребление за счет необходимости в энергопитании дополнительного датчика.
Также для определения факта наличия(начала) и отсутствия(прекращения) движения коляски может быть использован встроенный в корпус описываемого устройства или сопрягаемый с ним по средствам встроенных в описываемое устройство беспроводных модулей wi-fi или bluetooth, модуль GPS, - система глобального позиционирования. Недостатком применения такого решения является усложнение конструкции за счет применения дополнительного модуля GPS, увеличение энергопотребление за счет необходимости в энергопитании дополнительного модуля GPS или обеспечения питанием встроенных в описываемое устройство беспроводных модулей wi-fi или bluetooth для их функционирования с целью сопряжения внешнего модуля GPS с описываемым устройством; а так же и возможные неудобства для потребителя, связанные с зависимостью от наличия и качества сигнала GPS.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОННОЕ ПЛОМБИРОВОЧНОЕ УСТРОЙСТВО МНОГОРАЗОВОГО ДЕЙСТВИЯ (ЭПУ МД) | 2015 |
|
RU2596474C2 |
| Способ непрерывного контроля психофизиологического состояния водителей, перевозящих опасные грузы и пассажиров по дорогам общего пользования, система, его реализующая, и блок обработки и управления, используемый в ней | 2015 |
|
RU2662293C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ АВТОМОБИЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2450365C2 |
| СИСТЕМА ЭЛЕКТРООБОРУДОВАНИЯ ГУСЕНИЧНОЙ МАШИНЫ | 2014 |
|
RU2550876C1 |
| СПОСОБ И УСТРОЙСТВО СИГНАЛИЗАЦИИ ДЛЯ КОЛЯСКИ | 2015 |
|
RU2643339C1 |
| Способ интервального регулирования движения поездов с использованием канала индуктивной связи с мультиплексированием с разделением по частоте и предупреждением о наличии персонала на путях | 2021 |
|
RU2777670C1 |
| Противопожарное устройство с информированием о возгорании и его тушении | 2022 |
|
RU2818890C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ АВТОМОБИЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2550566C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ АВТОМОБИЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2625213C2 |
| АВТОНОМНОЕ МНОГОФУНКЦИОНАЛЬНОЕ СВЕТОТЕХНИЧЕСКОЕ УСТРОЙСТВО | 2013 |
|
RU2540943C1 |



Изобретение относится к области вычислительной техники для устройств сигнализации. Технический результат заключается в расширении функциональных возможностей за счет обеспечения максимальной информативности о состоянии коляски, обеспечении универсальности устройства за счет его возможности использовать на различных колясках, упрощении конструкции устройства сигнализации для коляски, легкости установки, надежности устройства. Технический результат достигается за счет микропроцессора, датчика расстояния, датчика измерения наклона коляски, светового и звукового сигнализаторов, пыле- и влагозащищенного корпуса, средства жесткой фиксации на рукоятке коляски, дисплея или цветных индикаторов, звукового сигнализатора. 4 з.п. ф-лы, 5 ил.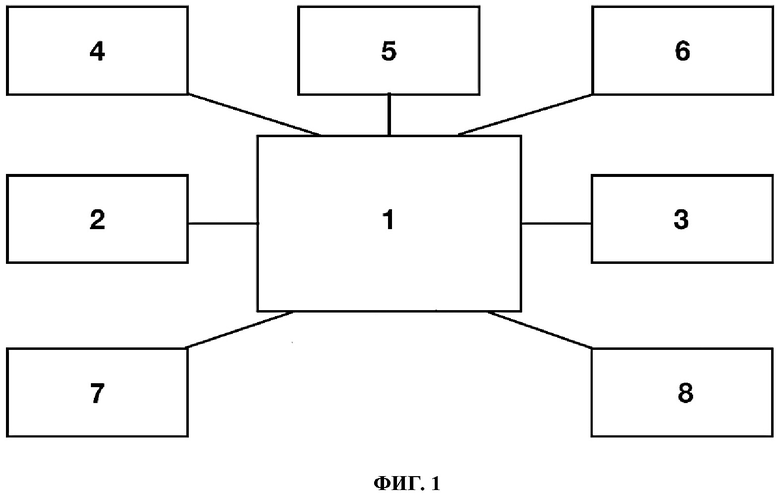
1. Устройство сигнализации для коляски, содержащее микропроцессор, датчик расстояния, предназначенный для срабатывания при превышении расстояния между устройством и лицом, управляющим коляской, заданного критического расстояния, датчик измерения наклона коляски относительно горизонтального уровня, предназначенный для срабатывания при каждом отклонении угла наклона коляски от горизонтального уровня, световой и звуковой сигнализаторы, выходы датчиков соединены с соответствующими входами микропроцессора, а входы светового и звукового сигнализаторов соединены с соответствующими выходами микропроцессора, все элементы устройства расположены и закреплены относительно друг друга в пыле- и влагозащищенном корпусе, снабженном средством жесткой фиксации на рукоятке коляски, световой сигнализатор выполнен в виде дисплея или цветных индикаторов, при этом световой сигнализатор предназначен для формирования выходного сигнала разного цвета в зависимости от положения и состояния коляски и установлен с возможностью его визуального восприятия, звуковой сигнализатор выполнен с возможностью формирования узконаправленной звуковой волны и предназначен для формирования выходного сигнала в зависимости от положения и состояния коляски, световой и звуковой сигнализаторы размещены в корпусе с возможностью восприятия их сигналов лицом, управляющим коляской, микропроцессор предназначен для восприятия сигналов с выходов датчика расстояния и датчика измерения наклона коляски и формирования сигналов, направляемых на световой и звуковой сигнализаторы для информирования лица, управляющего коляской, о состоянии и положении коляски, также микропроцессор предназначен для фиксирования движения коляски при поступлении на его вход в течение двух секунд не менее чем двух сигналов с выхода датчика измерения наклона коляски относительно горизонтального уровня.
2. Устройство по п. 1, отличающееся тем, что оно дополнительно снабжено датчиком внешней освещенности, выход которого соединен с соответствующим входом микропроцессора.
3. Устройство по п. 1, отличающееся тем, что датчик расстояния выполнен в виде ультразвукового датчика.
4. Устройство по п. 1, отличающееся тем, что датчик измерения наклона коляски выполнен в виде гироскопа–акселерометра.
5. Устройство по п. 1, отличающееся тем, что звуковой сигнализатор выполнен в виде биморфного динамика.
| СПОСОБ И УСТРОЙСТВО СИГНАЛИЗАЦИИ ДЛЯ КОЛЯСКИ | 2015 |
|
RU2643339C1 |
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| EP 3156984 B1, 12.09.2018 | |||
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| US 6992588 B1, 31.01.2006. | |||

