Изобретение относится к способам определения угловой скорости вращения метаемого объекта (МО), основанным на оптической регистрации, и может быть использовано для определения угловой скорости вращения МО при исследованиях в области аэродинамики, баллистики и т.д.
Известен «Способ определения угловой скорости вращения объекта, стабилизированного вращением» (патент RU №2577175, МПК G01P 3/48 (2017.01) опубл. 10.03.2016, Бюл. №7), согласно которому производят наблюдение физического параметра, текущая величина которого функционально связана с угловым положением объекта, стабилизированного вращением (ОСВ), определяют период вращения объекта и по периоду вращения вычисляют угловую скорость вращения объекта. Во время наблюдения изменения величины физического параметра фиксируют множество текущих значений выходного сигнала измерителя физических параметров на интервале времени порядка полутора периодов, на зафиксированном множестве строят функцию регрессии из условия достижения минимума среднеквадратического отключения невязки между значениями функции регрессии и множеством зафиксированных значений наблюдаемого физического параметра, за период вращения ОСВ принимают период изменения функции регрессии, а угловую скорость вращения объекта определяют по соотношению. В качестве физического параметра используют выходной синусоидальный сигнал с поперечного датчика угловой скорости (ДУС).
Основным недостатком данного способа является необходимость сохранения ОСВ после испытания, для того чтобы считать данные с ДУС или оснащение ОСВ системой передачи данных с ДУС в режиме реального времени, что приводит к усложнению и соответственно к повышению стоимости конструкции МО.
Техническая проблема, на решение которой направлено заявляемое изобретение, заключается в создании способа определения угловой скорости вращения МО в заданном сечении траектории его полета, а также способа, обеспечивающего контроль работоспособности внутренней аппаратуры до и или после пробития преграды.
Технический результат при использовании заявленного способа заключается в обеспечении возможности подтверждения правильной работы внутренней аппаратуры МО до и или после пробития преграды без сохранения МО после испытания для того, чтобы считать данные с ДУС, или оснащения МО системой передачи данных с ДУС в режиме реального времени.
Данный технический результат достигается за счет того, что в заявляемом способе определения угловой скорости вращения, в котором фиксируют изменение во времени физического параметра, функционально связанного с угловым вращением МО, определяют период вращения объекта и по периоду вращения вычисляют угловую скорость вращения объекта в отличие от прототипа, с помощью, фотокамер, работающих в режиме «открытого» затвора, или, видеокамер, у которых экспозиция превышает период одного оборота МО, либо период съемки меньше периода одного оборота МО, размещенных в заданных сечениях траектории полета МО, фиксируют изменение во времени физического параметра в виде треков от свечения не менее одного светодиода, подсоединенного к контрольным электрическим цепям внутренней аппаратуры МО и установленных в одном его сечении, перпендикулярном продольной оси МО. За период вращения МО принимают количество треков n+1 на снимке, где n - количество установленных в одном сечении светодиодов. Через масштабный коэффициент изображения камеры определяют расстояние L между центрами первого и n+1 трека, затем вычисляют угловую скорость ω вращения МО по формуле  где V - скорость МО на заданном участке траектории полета.
где V - скорость МО на заданном участке траектории полета.
За счет использования всей совокупности признаков заявляемого способа обеспечивается определение угловой скорости вращения в заданном сечении траектории полета МО.
Подсоединение не менее одного светодиода, установленного в одном сечении МО, перпендикулярном его продольной оси, к контрольным электрическим цепям внутренней аппаратуры МО обеспечивает возможность подтверждения правильности работы внутренней аппаратуры МО до и/или после пробития преграды без сохранения МО после испытания для того, чтобы считать данные о работе ДУС или оснащения МО системой передачи данных с ДУС в режиме реального времени.
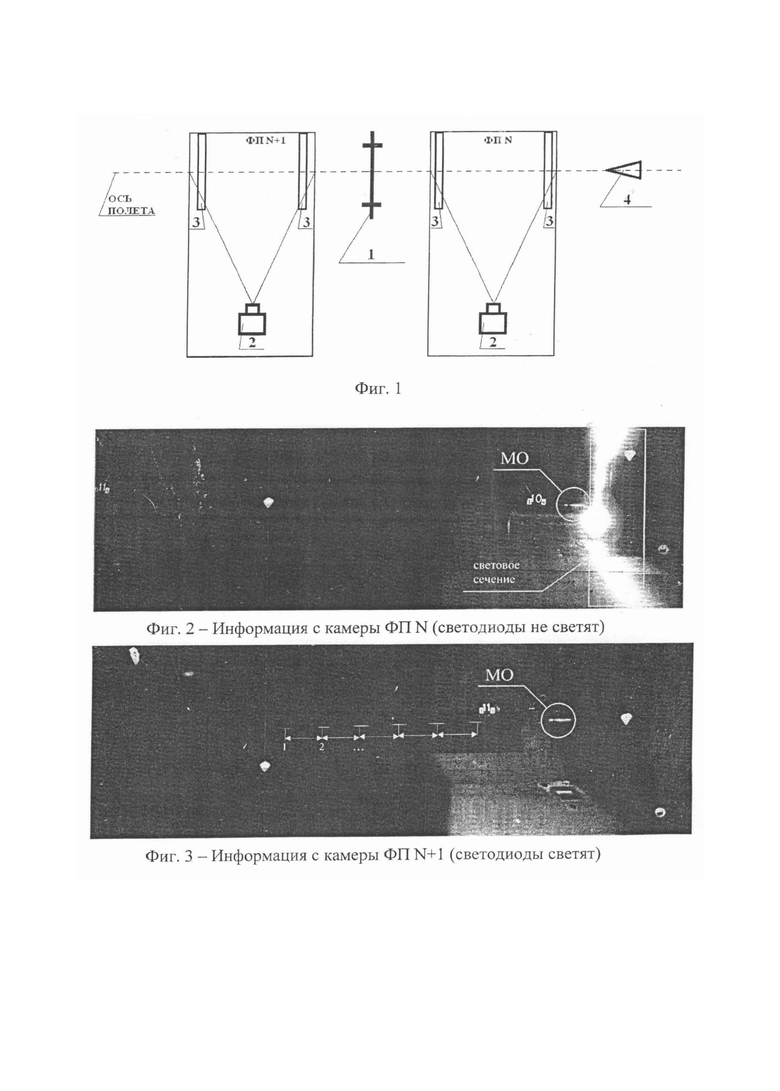
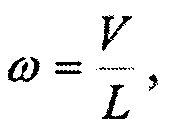
Изобретение поясняется фигурами. На фиг. 1 - показана схема расстановки регистрирующей аппаратуры, на фиг. 2 и 3 - показаны снимки, полученные в измерительных сечениях.
Заявляемый способ осуществляется следующим образом.
Перед проведением испытания в одном сечении МО 4, перпендикулярном его продольной оси, устанавливают, по крайней мере, один светодиод (например в одном сечении было установлено 4 светодиода), подсоединяют его к контрольным электрическим цепям внутренней аппаратуры МО (на фиг. не показано).
В заданных сечениях траектории полета МО 4, где требуется определение угловой скорости вращения или подтверждение работы внутренней аппаратуры по световой индикации, например, после пробития преграды 1, расставляют фотокамеры 2, работающие в режиме «открытого» затвора, или, видеокамеры 2, у которых экспозиция превышает период одного оборота либо видеокамеры 2, у которых период съемки существенно меньше периода одного оборота МО 4 (оборудуются фотопосты ФПN и ФПN+1) (Фиг. 1). Производят метание объекта 4.
По результатам оптической регистрации (см. фиг. 2 и 3) полета МО 4 измеряют соответствующее одному обороту МО 4 расстояние между центрами первого и n+1 трека от загорающихся после пробития преграды 1 светодиодов в случае соответствующего срабатывания внутренней аппаратуры МО, где n - количество установленных светодиодов. Один оборот МО 4 вокруг своей оси соответствует свечению n+1 светодиодов, т.е. n+1 трекам на снимке.
По изображению МО 4 и его фактической длине или с помощью иных, известных размеров определяют масштабный коэффициент изображения камеры 2.
Угловая скорость вращения МО 4 ω в заданном сечении траектории полета прямо пропорциональна скорости V МО 4, и обратно пропорциональна пройденному расстоянию за один оборот МО 4.
Скорость МО 4 на заданном участке траектории полета может быть определена при помощи датчиков 3, регистрирующих время пролета МО 4 заданного участка.
За период вращения МО 4 принимают количество n+1 треков на снимке, по которому через масштабный коэффициент изображения камеры 2 определяют расстояние L между центрами первого и n+1 трека, затем вычисляют угловую скорость вращения МО ω по формуле где - V - скорость МО 4 на заданном участке траектории полета.
Подсоединение, по крайней мере, одного светодиода, установленного в сечении МО 4, перпендикулярном его продольной оси, к контрольным электрическим цепям внутренней аппаратуры МО, обеспечивает возможность подтверждения правильности работы внутренней аппаратуры МО до и/или после пробития преграды
Технический результат при использовании заявленного способа заключается в определении угловой скорости вращения МО в заданном сечении траектории полета, обеспечении возможности подтверждения работоспособности внутренней аппаратуры до и/или после преграды без необходимости сохранения МО после испытания.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИСПЫТАНИЯ ПРОНИКАЮЩИХ БОЕПРИПАСОВ И СТЕНД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2023 |
|
RU2817779C1 |
| Стенд обратного метания железобетонных плит на боеприпасы | 2024 |
|
RU2833474C1 |
| Способ регистрации скоростей поражающих элементов для осесимметричных осколочных боеприпасов и стенд для его осуществления | 2022 |
|
RU2809643C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ПРОБИТИЯ ПРЕГРАДЫ МЕТАЕМЫМ ЭЛЕМЕНТОМ, НАПРИМЕР ПУЛЕЙ ЛИБО АРТИЛЛЕРИЙСКИМ СНАРЯДОМ, ЛИБО КУМУЛЯТИВНОЙ СТРУЕЙ, И УСТРОЙСТВО, РЕАЛИЗУЮЩЕЕ ЭТОТ СПОСОБ | 2009 |
|
RU2399861C1 |
| УСТРОЙСТВО КОНТАКТНОЙ СВЯЗИ, УСТАНОВКА И СПОСОБ ПРОВЕДЕНИЯ ИСПЫТАНИЙ С НЕПРЕРЫВНОЙ РЕГИСТРАЦИЕЙ ПАРАМЕТРОВ КОНЕЧНОЙ БАЛЛИСТИКИ МЕТАЕМЫХ ТЕЛ | 2005 |
|
RU2297619C1 |
| СПОСОБ БЕСКОНТАКТНОГО ОПРЕДЕЛЕНИЯ СКОРОСТИ МЕТАЕМОГО ОБЪЕКТА | 2011 |
|
RU2470311C1 |
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ О ПЕРЕМЕЩЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2436047C1 |
| УСТРОЙСТВО И СПОСОБ ПРОВОДНОЙ ЭЛЕКТРИЧЕСКОЙ СВЯЗИ ДЛЯ РЕГИСТРАЦИИ ПАРАМЕТРОВ ФУНКЦИОНИРОВАНИЯ МЕТАЕМОГО ТЕЛА В ПОЛНОМ БАЛЛИСТИЧЕСКОМ ЦИКЛЕ | 2009 |
|
RU2413917C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ СКОРОСТИ ВРАЩЕНИЯ ОБЪЕКТА, СТАБИЛИЗИРОВАННОГО ВРАЩЕНИЕМ | 2014 |
|
RU2577175C1 |
| УСТРОЙСТВО ПРОВОДНОЙ ЭЛЕКТРИЧЕСКОЙ СВЯЗИ ДЛЯ МЕТАЕМОГО ТЕЛА И СПОСОБ ИСПЫТАНИЙ МЕТАЕМЫХ ТЕЛ С НЕПРЕРЫВНОЙ РЕГИСТРАЦИЕЙ БАЛЛИСТИЧЕСКИХ ПАРАМЕТРОВ | 2005 |
|
RU2287756C1 |
Изобретение относится к области определения угловой скорости вращения. Способ определения угловой скорости вращения метаемого объекта заключается в фиксации изменения во времени физического параметра, функционально связанного с угловым вращением метаемого объекта, определении периода вращения объекта и вычислении по периоду вращения угловой скорости вращения объекта. С помощью фотокамер, работающих в режиме «открытого» затвора, или видеокамер, у которых экспозиция превышает период одного оборота метаемого объекта либо период съемки меньше периода одного оборота метаемого объекта, размещенных в заданных сечениях траектории полета метаемого объекта, фиксируют изменение во времени физического параметра в виде треков от свечения не менее одного светодиода, подсоединенного к контрольным электрическим цепям внутренней аппаратуры метаемого объекта, и установленных в одном его сечении, перпендикулярном продольной оси метаемого объекта, при этом за период вращения метаемого объекта принимают количество треков n+1 на снимке, по которому через масштабный коэффициент изображения камеры определяют расстояние между центрами первого и n+1 трека, где n - это количество установленных в одном сечении метаемого объекта светодиодов, затем вычисляют угловую скорость вращения метаемого объекта. Технический результат заключается в определении угловой скорости вращения метаемого объекта в заданном сечении траектории полета, обеспечении возможности подтверждения работоспособности внутренней аппаратуры до и/или после преграды без необходимости сохранения метаемого объекта после испытания. 3 ил.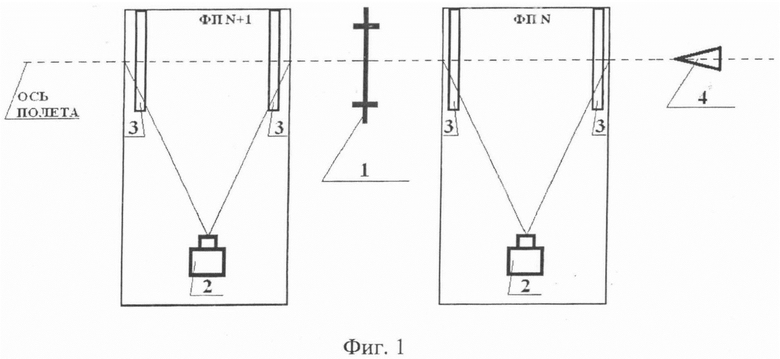
Способ определения угловой скорости вращения метаемого объекта (МО), заключающийся в том, что фиксируют изменение во времени физического параметра, функционально связанного с угловым вращением МО, определяют период вращения объекта и по периоду вращения вычисляют угловую скорость вращения объекта, отличающийся тем, что с помощью фотокамер, работающих в режиме «открытого» затвора, или видеокамер, у которых экспозиция превышает период одного оборота МО либо период съемки меньше периода одного оборота МО, размещенных в заданных сечениях траектории полета МО, фиксируют изменение во времени физического параметра в виде треков от свечения не менее одного светодиода, подсоединенного к контрольным электрическим цепям внутренней аппаратуры МО, и установленных в одном его сечении, перпендикулярном продольной оси МО, при этом за период вращения МО принимают количество треков n+1 на снимке, по которому через масштабный коэффициент изображения камеры определяют расстояние L между центрами первого и n+1 трека, где n - это количество установленных в одном сечении МО светодиодов, затем вычисляют угловую скорость ω вращения МО по формуле
где V - скорость МО на данном участке траектории полета.
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ СКОРОСТИ ВРАЩЕНИЯ ОБЪЕКТА, СТАБИЛИЗИРОВАННОГО ВРАЩЕНИЕМ | 2014 |
|
RU2577175C1 |
| Устройство для высокоскоростной съемки | 2016 |
|
RU2634369C1 |
| Способ измерения угловой скорости объекта | 1979 |
|
SU1080083A1 |
| US 20140253104 A1, 11.09.2014. | |||

