Изобретение относится к измерительной технике, а именно к способу определения угловой скорости вращения объекта, стабилизированного вращением (ОСВ) и может быть использовано в бортовых системах управления движением аэробаллистических ОСВ.
При определении углового положения ОСВ путем интегрирования угловой скорости вращения накапливаемая ошибка при достигнутой в настоящее время точности измерения угловой скорости и значительном времени наблюдения (t>103 с) существенно превышает допустимую погрешность решения задач управления движением аэробаллистических объектов. При решении задач в области создания аэробаллистических объектов с управляемым движением данное положение определяет знание с высокой точностью угловой скорости вращения как объективную необходимость.
Повышение точности определения угловой скорости вращения ОСВ возможно путем перехода к наблюдению физического параметра, текущая величина которого функционально связана. с угловым положением ОСВ, на основе которого определяется период вращения объекта и, соответственно, угловая скорость вращения ОСВ.
Известен способ определения угловой скорости вращения объекта [статья «Повышение точности определения угловой скорости быстровращающихся объектов», Гироскопия и навигация, Л.В. Водичева, Е.Л. Алиевская и др., С.-Петербург, Государственный научный центр Российской Федерации ОАО «Концерн «ЦНИИ «Электроприбор», 2012 г, вып. 1 (76), стр. 27-41], заключающийся в том, что наблюдают изменение во времени физического параметра, функционально связанного с изменением углового положения ОСВ, определяют период вращения объекта и по периоду вращения вычисляют угловую скорость вращения объекта.
В данном способе в качестве физического параметра используют выходной синусоидальный сигнал с поперечного датчика угловой скорости (ДУС). При наблюдении выходного сигнала выделяют опорные точки перехода сигнала через «ноль» с учетом смены знака с измерением текущего значения времени в каждой опорной точке tj, tj+1. При этом опорные точки совпадают с моментами опроса ДУС, т.е. кратны частоте опроса ДУС. Последовательно измеряют длительность каждого j-го интервала между моментами перехода с учетом смены знака, а именно, периода вращения Tj по формуле Tj=tj+1-tj. За период вращения ОСВ принимают усредненное значение результатов измерений всех интервалов Tj. Усреднение производят согласно выражению:  где J - общее количество измеренных Tj; j - последовательность (1, 2, 3 и т.д.) всех измеренных Tj. А угловую скорость вращения ω определяют по соотношению:
где J - общее количество измеренных Tj; j - последовательность (1, 2, 3 и т.д.) всех измеренных Tj. А угловую скорость вращения ω определяют по соотношению:  . Длительность времени наблюдения сигнала по прототипу достигает порядка 200 периодов. По существу, данным способом определяют среднее значение угловой скорости вращения объекта на интервале всего времени наблюдения.
. Длительность времени наблюдения сигнала по прототипу достигает порядка 200 периодов. По существу, данным способом определяют среднее значение угловой скорости вращения объекта на интервале всего времени наблюдения.
Данный способ наиболее близок по технической сущности к заявляемому и поэтому принят за прототип.
При использовании данного способа точность определения угловой скорости вращения существенно зависит от стабильности угловой скорости вращения ОСВ, частоты опроса ДУС и времени наблюдения сигнала.
Недостатком прототипа является то, что значительные времена наблюдения сигнала, необходимые для достижения требуемой точности определения периода вращения объекта, и вопрос состоятельности полученной оценки точности при нестабильности скорости вращения ограничивают возможность использования его при малом времени наблюдения сигнала, порядка полутора периода вращения.
Техническим результатом, на достижение которого направлено заявляемое изобретение, является обеспечение высокоточного определения угловой скорости вращения ОСВ при малом времени наблюдения, порядка полутора периодов.
Технический результат достигается тем, что в способе определения угловой скорости вращения объекта, стабилизированного вращением (ОСВ), заключающимся в том, что наблюдают изменение во времени физического параметра, функционально связанного с изменением углового положения ОСВ, определяют период вращения объекта и по периоду вращения объекта вычисляют угловую скорость вращения объекта, согласно изобретению во время наблюдения изменения величины физического параметра фиксируют множество текущих значений выходного сигнала измерителя физических параметров на интервале времени порядка полутора периодов, на зафиксированном множестве строят функцию регрессии из условия достижения минимума среднеквадратического отклонения невязки между значениями функции регрессии и множеством зафиксированных значений наблюдаемого физического параметра, за период вращения ОСВ принимают период изменения функции регрессии, а угловую скорость вращения объекта определяют по соотношению: ω=2π/Τ, где Τ - период изменения функции регрессии.
Отличия предложенного технического решения от известного, а именно:
- фиксация во время наблюдения изменения величины физического параметра множества текущих значений выходного сигнала измерителя физических параметров на интервале времени порядка полутора периодов,
- построение функции регрессии на зафиксированном множестве из условия достижения минимума среднеквадратического отклонения невязки между значениями функции регрессии и множеством зафиксированных значений наблюдаемого физического параметра,
- принятие за период вращения ОСВ периода изменения функции регрессии, по которому и вычисляют угловую скорость вращения объекта, дает возможность повысить точность определения угловой скорости вращения объекта при малых интервалах наблюдения сигнала, порядка полутора периода вращения.
Наличие в заявленном изобретении признаков, существенно отличающих его от прототипа, позволяет его считать соответствующим условию "новизна".
Новые признаки, которые содержит отличительная часть формулы изобретения, не выявлены в технических решениях аналогичного назначения. На этом основании можно сделать вывод о соответствии заявляемого изобретения условию «изобретательский уровень».
Способ осуществляется следующим образом.
При движении ОСВ наблюдают изменение во времени физического параметра, функционально связанного с изменением углового положения ОСВ (например, величины проекций вектора магнитной индукции на оси связанной системы координат объекта или величины угловой скорости по трем осям связанной системы координат объекта).
Во время наблюдения на интервале времени порядка полутора периодов вращения ОСВ фиксируют множество текущих значений выходного сигнала измерителя физических параметров.
На зафиксированном множестве строят функцию регрессии из условия достижения минимума среднеквадратического отклонения невязки между значениями функции регрессии и множеством зафиксированных значений наблюдаемого физического параметра.
За период вращения объекта принимают период изменения функции регрессии, а угловую скорость вращения объекта определяют по соотношению:  где Τ - период изменения функции регрессии.
где Τ - период изменения функции регрессии.
Практическая возможность достижения требуемого технического результата при использовании изобретения подтверждается данными, представленными в таблице.
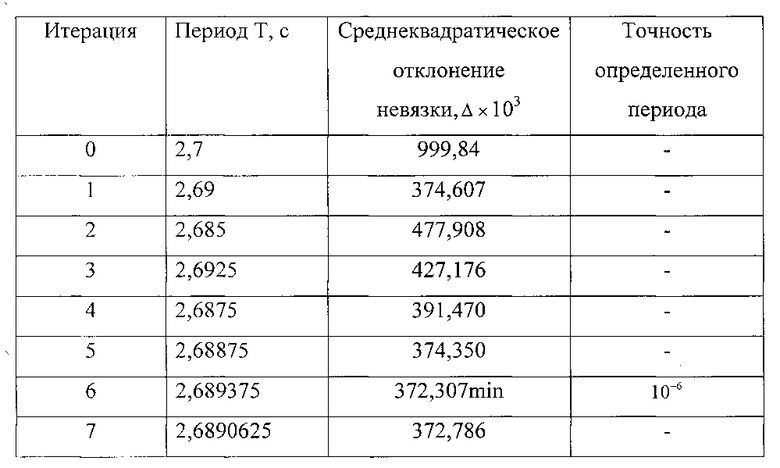
В графе итерация (0, 1, 2, 3 и т.д.) таблицы дана последовательность повторных пересчетов среднеквадратического отклонения при каждом новом (очередном) значении периода.
Данные таблицы наглядно демонстрируют динамику повышения точности определения периода функции регрессии с уменьшением среднеквадратического отклонения, а следовательно, и повышение точности определения угловой скорости вращения ОСВ, достигаемой при использовании предлагаемого способа.
Таким образом, представленные сведения свидетельствуют о выполнении при использовании заявляемого изобретения следующей совокупности условий:
- обеспечение высокоточного определения угловой скорости вращения ОСВ при малом времени наблюдения, порядка полутора периода;
- данный способ предназначен для определения угловой скорости вращения объекта, стабилизированного вращением (ОСВ), и может быть использован в бортовых системах управления движением аэробаллистических ОСВ;
- для заявляемого способа в том виде, в котором он охарактеризован в формуле изобретения, подтверждена возможность его осуществления с помощью описанных в заявке и известных до даты приоритета средств и методов.
Следовательно, заявляемое изобретение соответствует условию «промышленная применимость».
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения угловой скорости вращения метаемого объекта | 2018 |
|
RU2692115C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА КРЕНА ОБЪЕКТА, СТАБИЛИЗИРОВАННОГО ВРАЩЕНИЕМ | 2014 |
|
RU2561795C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ УПРАВЛЯЕМОГО АППАРАТА, ПОДВЕШЕННОГО К САМОЛЕТУ-НОСИТЕЛЮ | 2014 |
|
RU2553776C1 |
| Способ коррекции бесплатформенной инерциальной навигационной системы | 2016 |
|
RU2646954C2 |
| Адаптивный корректор углов ориентации для БИНС | 2020 |
|
RU2749152C1 |
| Способ повышения точности калибровки блока микромеханических датчиков угловой скорости | 2019 |
|
RU2727344C1 |
| АВТОНОМНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ НАЧАЛЬНОЙ ОРИЕНТАЦИИ ПРИБОРНОЙ СИСТЕМЫ КООРДИНАТ БЕСПЛАТФОРМЕННОГО ИНЕРЦИАЛЬНОГО БЛОКА УПРАВЛЯЕМОГО ОБЪЕКТА ОТНОСИТЕЛЬНО БАЗОВОЙ СИСТЕМЫ КООРДИНАТ | 2008 |
|
RU2386107C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ ПОЛОЖЕНИЙ ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2256154C1 |
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ О ПЕРЕМЕЩЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2436047C1 |
| Способ коррекции углов ориентации ЛА по сигналам от одноантенной СНС | 2022 |
|
RU2790081C1 |
Изобретение относится к измерительной технике, а именно к способу определения угловой скорости вращения объекта, стабилизированного вращением. Способ определения угловой скорости вращения объекта, стабилизированного вращением (ОСВ, заключается в том, что наблюдают изменение во времени физического параметра, функционально связанного с изменением углового положения ОСВ, определяют период вращения объекта, по которому вычисляют угловую скорость вращения объекта. Во время наблюдения изменения величины физического параметра фиксируют множество текущих значений выходного сигнала измерителя физических параметров на интервале времени порядка полутора периодов. На зафиксированном множестве строят функцию регрессии из условия достижения минимума среднеквадратического отклонения невязки между значениями функции регрессии и множеством зафиксированных значений наблюдаемого физического параметра. За период вращения ОСВ принимают период изменения функции регрессии. Технический результат - высокоточное определение угловой скорости вращения ОСВ при малом времени наблюдения, порядка полутора периодов. 1 табл.
Способ определения угловой скорости вращения объекта, стабилизированного вращением (ОСВ), заключающийся в том, что наблюдают изменение во времени физического параметра, функционально связанного с изменением углового положения ОСВ, определяют период вращения объекта и по периоду вращения вычисляют угловую скорость вращения объекта, отличающийся тем, что во время наблюдения изменения величины физического параметра фиксируют множество текущих значений выходного сигнала измерителя физических параметров на интервале времени порядка полутора периодов, на зафиксированном множестве строят функцию регрессии из условия достижения минимума среднеквадратического отклонения невязки между значениями функции регрессии и множеством зафиксированных значений наблюдаемого физического параметра, за период вращения ОСВ принимают период изменения функции регрессии, а угловую скорость вращения объекта определяют по соотношению:  , где Τ - период изменения функции регрессии.
, где Τ - период изменения функции регрессии.
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ ВРАЩЕНИЯ ТРЕХФАЗНОГО АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2013 |
|
RU2525604C1 |
| Способ измерения угловой скорости вращения | 1976 |
|
SU679875A1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ УГЛОВОЙ | 0 |
|
SU394831A1 |
| US 2014253104 A1, 11.09.2014. | |||

