Изобретение относится к области приборостроения и может найти применение в бесплатформенных инерциальных системах навигации, комплексированных со спутниковой навигационной системой.
Известен способ определения координат летательного аппарата (ЛА), включающий операции измерения дальностей ЛА до группы наземных радиомаяков, находящихся в зоне его прямой видимости, с помощью позиционного навигационного датчика, при этом полученные результаты измерений дальностей комплексируются в бортовом вычислителе с результатами измерений бортовых трехкоординатных датчиков линейных перегрузок ДЛУ, трехкоординатных датчиков угловых скоростей ДУС и курсовертикали, измеряющей углы крена, тангажа и рысканья, и производят оценку координат и скоростей ЛА для текущего момента времени на скользящем интервале времени [t0, t], где t0 - начальное время измерения; t=t0+T - текущий момент реального времени; Т - длина скользящего интервала времени наблюдения измерений, для момента времени t0 по измерениям позиционного навигационного датчика, ДЛУ, ДУС и курсовертикали производят оценку трех проекций скорости на оси связанной системы координат и трех координат ЛА путем итерационного решения системы алгебраических уравнений для приращений оценок относительно их априорных значений, а затем по измерениям перегрузок, угловых скоростей и углов крена, тангажа и рысканья производят оценку координат ЛА для момента времени t путем решения дифференциальных уравнений, описывающих изменения трех проекций скорости и трех координат ЛА на скользящем интервале времени [t0, t], с начальными условиями, равными оценкам координат и скоростей ЛА для момента времени t0, оценку координат ЛА повторяют в каждый дискретный момент времени наблюдения, отличающийся от предыдущего на величину, определяемую быстродействием бортового вычислителя (см. патент РФ №2264598, кл. GOIC 23/00, 2006).
Наиболее близким к предложенному является способ определения навигационных параметров бесплатформенной инерциальной навигационной системой, основанный на использовании сигналов блока акселерометров и гироскопических датчиков угловых скоростей путем расчета матрицы направляющих косинусов между связанной и навигационной системами координат, компенсации погрешностей акселерометров за счет учета вращения связанной системы, пересчета показаний акселерометров из связанной в навигационную систему координат и их интегрирования для расчета текущих скоростей и приращений координат, при этом осуществляют разные режимы движения носителя, на котором установлена бесплатформенная инерциальная навигационная система, этими режимами являются сильный маневр, слабое маневрирование и крейсерское движение без маневрирования, при этом измеряют параметры движения носителя, этими параметрами являются крен, производная курса и ускорение носителя в плоскости горизонта, далее эти параметры используют для вычисления коэффициентов усиления систем, реализующих индивидуальные законы управления параллельно вычисляемых матриц направляющих косинусов между связанной и навигационной системами координат по одним и тем же показаниям акселерометров и датчиков угловых скоростей, для каждой вычисленной матрицы направляющих косинусов определяют собственные навигационные параметры, имеющие различный частотный характер ошибок, и ошибки вычисления каждой из матриц также имеют различный частотный спектр в зависимости от режимов движения носителя, навигационные параметры для каждой вычисленной матрицы направляющих косинусов подают на входы мастер-фильтра, формирующего оптимальную комбинацию навигационных решений в зависимости от частотного диапазона их ошибок, а также от параметров движения носителя (см. патент РФ №2348903, кл. GOIC 21/10, 2009).
Известные способы предназначены для выполнения задач стабилизации положения летательного аппарата в пространстве, но не решают задачи восстановления траектории в процессе полета и определения траектории после полета, что очень важно для целей радиолокации, когда необходимо точно знать положение ЛА в пространстве в любой момент времени.
Техническим результатом, на достижение которого направлено данное изобретение, является повышение эффективности способа обработки информации путем обеспечения определения и восстановления траектории ЛА.
Указанный технический результат достигается за счет того, что способ обработки информации о перемещении летательного аппарата (ЛА) характеризуется тем, что он включает в себя получение информации о параметрах навигации от инерциальной навигационной системы (ИНС), состоящей из функционирующих в режиме регистрации информации, по меньшей мере, одного трехосевого акселерометра, по меньшей мере, одного трехосевого датчика угловой скорости и, по меньшей мере, одного магнитометра, и спутниковой навигационной системы (СНС), осуществление комплексирования данных от спутниковой и инерциальной навигационных систем с возможностью корректировки параметров навигации и ошибок, накапливающихся при функционировании ИНС, определение по полученным от ИНС и СНС данным вектора притяжения Земли и использование полученного результата для учета вычисленных углов ориентации ЛА при обнулении показаний, расчет положения перемещающегося ЛА на основе данных, полученных от приемника СНС, данных о направлении вектора магнитного поля и данных о значениях угловых скоростей ЛА, при этом маркируют выбранную траекторию перемещения ЛА точками его возможного нахождения, находящимися друг относительно друга в пространстве на расстоянии, равном заранее заданной величине, реальные координаты положения ЛА с использованием данных от ИНС и СНС определяют в дискреты времени, величины которых зависят от динамики и направления угловых скоростей ЛА при его перемещении, с учетом ранее полученных оценок координат положений ЛА путем интерполирования, для уточнения расстояния перемещения ЛА в каждую дискрету времени оценивают упреждающие значения времени и момента достижения точки прогнозируемого окончания перемещения ЛА, причем в каждую дискрету времени осуществляют коррекцию вычисленного положения ЛА с учетом оценки невязки и зарегистрированного, по меньшей мере, одним магнитометром модуля и направления магнитного поля, при этом невязку вычисляют как расхождение между рассчитанной траекторией ЛА на основе данных от приемника СНС и выбранной траекторией ЛА.
Кроме того, функционирование приемника СНС во времени синхронизируют со всемирным координированным временем, и, кроме того, данные, поступающие от приемника СНС, передают в виде, по меньшей мере, одного информационного потока с возможностью географической регистрации местоположения ЛА.
Кроме того, при перемещении ЛА между точками его возможного нахождения, находящимися друг относительно друга в пространстве на расстоянии, равном заранее заданной величине, передают информацию на целевую нагрузку, например информацию о местоположении радиолокатора.
Информацию, по меньшей мере, от одного трехосевого акселерометра и, по меньшей мере, одного трехосевого датчика угловой скорости, полученную в момент начальной калибровки ИНС, используют для устранения смещений в их показаниях.
По меньшей мере, один информационный поток, поступающий от приемника СНС, вводят в информационно-логическую сеть для обработки информации о перемещении ЛА, используя, по меньшей мере, один заранее установленный протокол обмена данными.
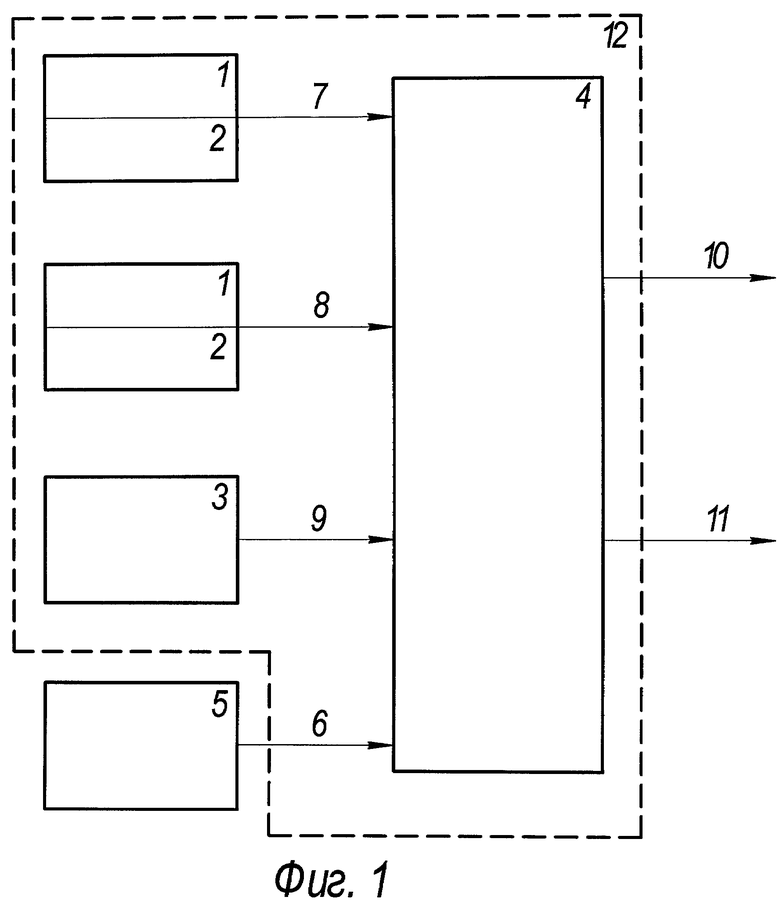
Сущность данного изобретения поясняется на фиг.1, 2 и 3, где на фиг.1 показана блок-схема блока навигационного обеспечения (БНО), на фиг.2 представлен алгоритм функционирования БНО, а на фиг.3 показана траектория перемещения ЛА с целевой нагрузкой, при этом траектория близка к прямой, но имеет отклонения в ту или иную сторону.
На фиг.1 приняты следующие обозначения: 1 - узел датчиков угловых скоростей, 2 - узел акселерометров, 3 - модуль спутниковой навигационной системы, 4 - модуль навигационного обеспечения, 5 - по меньшей мере, один трехосевой магнитометр, 6 - входы модуля навигационного обеспечения, 7, 8, 9 - первые, вторые и третьи информационные входы модуля навигационного обеспечения, 10 - первые входы модуля навигационного обеспечения, 11 - вторые входы модуля навигационного обеспечения, 12 - БНО.
Таким образом, блок 12 навигационного обеспечения (БНО) включает в себя узел 1 датчиков угловых скоростей, узел 2 акселерометров, модуль 3 СНС, модуль 4 навигационного обеспечения.
Одни из входов 6 модуля 4 навигационного обеспечения являются входами блока навигационного обеспечения и выполнены с возможностью подключения к выходам, по меньшей мере, одного трехосевого магнитометра 5, измерительные оси которого ориентированы ортогонально в пространстве.
Датчики угловых скоростей и акселерометров соответствующих узлов 1 и 2 пространственно ориентированы по ортогональным осям, при этом первые 7, вторые 8 и третьи 9 информационные входы модуля 4 навигационного обеспечения соединены с соответствующими выходами, соответственно, узла 1 датчиков угловых скоростей, узла 2 акселерометров и модуля 3 спутниковой навигационного системы, первые выходы модуля 4 навигационного обеспечения являются первыми выходами блока навигационного обеспечения и выполнены с возможностью передачи информации, касающейся изменения положения летательного аппарата, вторые выходы модуля 4 навигационного обеспечения являются вторыми выходами блока навигационного обеспечения и выполнены с возможностью передачи данных о пространственном положении летательного аппарата.
В узлах 1 и 2, соответственно, датчиков угловых скоростей и акселерометров, находящихся на борту летательного аппарата (ЛА), использованы «грубые» чувствительные элементы, т.е. элементы с низкой точностью, обусловленной дрейфом гироскопов (входят в состав датчиков угловых скоростей и акселерометров).
Модуль 4 навигационного обеспечения снабжен узлом фильтрации входных сигналов, узлом определения базовых показаний акселерометров, узлом вычисления углов ориентации летательного аппарата, узлом интерполяции траектории полета летательного аппарата, узлом вычисления координат положения летательного аппарата, узлом определения временного интервала, характеризующего перемещение летательного аппарата, узлом формирования информации о пространственном положении летательного аппарата, а также узлом сжатия данных (на фиг.1 не показаны).
На фиг.2 приняты следующие обозначения:
13 - информация, идущая от датчиков узла 1 датчиков угловых скоростей;
14 - информация, поступающая от акселерометров узла 2;
15 - информация, идущая, по меньшей мере, от одного трехосевого магнитометра 5;
16 - информация, поступающая от приемника модуля 3 СНС;
17, 18, 19 - осуществление фильтрации сигналов навигационной информации;
20 - выполнение алгоритма БИНС;
21 - установка времени упреждения;
22 - определение невязки;
23 - вычисление углов ориентации ЛА;
24 - вычисление координат положения ЛА;
25 - вычисление вектора скорости ЛА;
26 - определение временного интервала, характеризующего перемещение ЛА.
На фиг.3 приняты следующие обозначения:
27 - такт работы системы, выполняющей алгоритм;
28 - период времени, за который пройден интервал «n-метров» при первой заданной скорости;
29 - период времени, за который пройден интервал «n-метров» при второй заданной скорости;
30 - пошаговое уточнение момента достижения с учетом удаления от текущей точки полета на «n метров»;
31 - время работы выдачи управляющего воздействия;
32 - момент подачи команды на начало работы целевой нагрузки.
Узел фильтрации входных сигналов (на фиг.1 не показан) выполнен с возможностью обработки поступающих от акселерометров и датчиков угловых скоростей сигналов фильтром Калмана или с возможностью обработки поступающих от, по меньшей мере, одного трехосевого магнитометра 5 сигналов усредняющим фильтром, функционирующим в режиме задержки сигналов на 10 мс или с возможностью обработки поступающих от модуля 3 спутниковой навигационной системы сигналов фильтром Кальмана.
Узел интерполяции траектории полета летательного аппарата (на фиг.1 не показан) выполнен с возможностью учета данных об угловых скоростях и магнитном курсе летательного аппарата и информации, поступающей от модуля спутниковой навигационной системы.
Акселерометры соответствующих узлов 2 выполнены с возможностью функционирования в различных диапазонах регистрируемых ускорений.
Узел формирования информации о пространственном положении летательного аппарата (на фиг.1 не показан) выполнен с возможностью подключения, по меньшей мере, к одному каналу связи для передачи данных в пакетном режиме по заранее заданному протоколу обмена информацией.
Узел сжатия данных (на фиг.1 не показан) выполнен с возможностью подключения, по меньшей мере, к одному каналу связи для передачи информации с целью ее последующей обработки.
Узел фильтрации входных сигналов (на фиг.1 не показан) осуществляет устранение систематических погрешностей датчиков, «сведение» информации от пар датчиков и фильтрацию полученных данных. Для устранения смещений датчиков используются данные, полученные в момент начальной калибровки системы, для устранения неточности геометрии корпуса блока и погрешности установки датчиков - данные, полученные во время производственной калибровки БНО во время его изготовления. «Сведение» информации с одинаковых датчиков осуществляется простым суммированием (с учетом систематических погрешностей каждого датчика). «Сведение» информации с разнородных датчиков осуществляется взвешенным суммированием, причем веса изменяются от измеряемой физической величины. Для фильтрации полученной после сведения информации используются фильтры с небольшим значением групповой задержки. Характеристики фильтров для канала угловых скоростей и канала ускорений различны.
Узел определения базовых показаний акселерометров (на фиг.1 не показан) функционирует на основании статистики погрешностей датчиков.
При этом в узле математически определяется вектор земного притяжения (направления на центр земли). При расчете данного вектора списывается погрешность установки БНО на борту ЛА и изменения углов отклонения летательного аппарата от вертикали по крену и тангажу при выполнении полета.
Использование значений абсолютного значения вектора магнитного поля и его направления (в т.ч. изменения направления) позволяют ввести дополнительную фильтрацию и увеличить точность вычислений углов ориентации летательного аппарата.
Точность показаний датчиков при этом такова, что это значение ускорения свободного падения от запуска к запуску меняется в диапазоне 9.56÷10.05 м/с2.
Узел вычисления углов ориентации ЛА (на фиг.1 не показан) по значению величины угловых скоростей и направления вектора магнитного поля дает значения углов ориентации ЛА.
В узле осуществляется определение ориентации объекта в пространстве. Для увеличения точности и снижения влияния шумов низкоточных микромеханических датчиков применяется значение направления магнитного поля, обладающее сравнительно низкой разрешающей способностью, но не имеющей в сигнале шумовых составляющих.
На основании входящих параметров вычисляемых углов ориентации летательного аппарата и рассчитанного вектора земного притяжения определяются значения нулевого списания показаний акселерометров (датчиков линейного ускорений) при изменении ориентации объекта в пространстве (определяется направление вектора земного притяжения относительно объекта управления). Здесь определяются значения проекции вектора притяжения земли на наш объект в зависимости от ориентации объекта относительно направления притяжения.
Узел интерполяции траектории полета ЛА (на фиг.1 не показан) функционирует следующим образом.
На основании данных от приемника СНС, направления вектора магнитного поля и угловых скоростей определяется расчет положения объекта в системе координат XYZ. Вычисления осуществляются с применением алгоритмов постобработки, что приводит к определению координат с существенно высокой точностью, с условием получения значения с частотой работы алгоритма программы с фиксированной временной задержкой (обусловлена обработкой информации от приемника СНС).
Узел вычисления координат положения ЛА (на фиг.1 не показан) предназначен для расчета координат, скорости изменения координат и курса ЛА по значениям величин показаний датчиков угловых скоростей, акселерометров и с учетом невязки при определении координат ЛА. Он является основным узлом невязки модуля 4 навигационного обеспечения 4, осуществляет расчет положения и ориентации объекта в пространстве. Использование «грубых» ЧЭ (дрейф гироскопов 0,1…1 град/сек) не позволяет осуществлять с требуемой точностью расчет координат летательного аппарата в период более 3÷3,5 секунд.
Для обеспечения необходимой точности работы данного узла в каждый такт его работы осуществляется коррекция вычислений на основании невязок и направления и абсолютного значения вектора магнитного поля. Задержка во времени определения невязок определена задержкой в определении координат по информации от СНС. Следовательно, с одной стороны, не учитывается возможная дополнительная ошибка в последние секунды, с другой стороны - высокоточное определение отклонения результатов вычислений от реальных координат объекта.
Данное значение определено на основании точности автономного определения координат, итоговая точность определяется качеством определения невязки.
Невязка рассчитывается на основании расхождения между рассчитанными траекториями рассчитанной на основании данных приемника СНС и траектории ЛА.
Узел определения траектории движения ЛА (на фиг.1 не показан) отвечает за определение координат положения ЛА в заданный момент времени, передаваемый в узел определения временного интервала. Узел интерполирует траекторию движения ЛА по нескольким известным узловым точкам положения ЛА в известные моменты времени до заданного момента выдачи «дельта» импульса и, по крайней мере, одной известной точке в соответствующий момент времени после заданного момента времени. Далее на данной интерполированной траектории определяется точка, в которой ЛА находился в момент выдачи «дельта»-импульса.
Необходимость наличия узла определения временного интервала, характеризующего перемещение ЛА (на фиг.1 не показан), продиктована предполагаемыми высокими скоростями движения ЛА, что в случае формирования признака прохождения наперед заданного расстояния в n метров (далее «дельта»-импульса) в каждый тракт работы алгоритма потребовало бы неоправданно высоких скоростей его работы. Вместо этого в рассматриваемой системе на основе знания текущего значения и динамики изменения скорости ЛА вычисляется момент времени выдачи следующего «дельта»-импульса, причем, если это время находится за пределами следующего цикла работы алгоритма, «дельта»-импульс не выдается, если же выясняется, что на начало очередного цикла работы алгоритма ЛА уже преодолел наперед заданное расстояние, «дельта»-импульс выдается немедленно. Во всех остальных случаях рассчитывается промежуток времени dT, после прохождения которого от начала очередного цикла работы алгоритма ЛА должен оказаться на расстоянии n метров от точки, в которой был выдан предыдущий «дельта»-импульс. Узел программируется на выдачу «дельта»-импульса в этот момент времени. Момент выдачи «дельта»-импульса запоминается. В следующем после выдачи «дельта»-импульса цикле работы алгоритма на основании данных о фактических координатах ЛА на момент начала этого цикла определяются реальные смещения ЛА по осям X, Y, Z относительной начальной точки работы алгоритма, и именно они передаются в узел формирования информации о пространственном положении ЛА. Таким образом исключается накопление погрешности, связанной с возможностью неточного определения момента времени прохождения ЛА наперед заданного расстоянии n метров.
На вход узла формирования информации о пространственном положении ЛА (на фиг.1 не показан) поступают:
- сведенные к осям модуля навигационного обеспечения составляющие ускорений с акселерометров, с учетом смещений масштабов, с блока сжатия «сырых данных»;
- сведенные к осям модуля навигационного обеспечения составляющие ускорений акселерометров, с учетом смещений и масштабов, с блока сжатия данных;
- данные с СНС;
- данные о местоположении ЛА в координатах XYZ;
- данные о смещении относительно предыдущей «дельты»;
- признак выдачи дельты;
- временные метки.
В соответствии с установленным протоколом обмена с взаимодействующей системой узел формирует и отправляет в канал связи пакеты данных. Каждый пакет имеет метку времени, что позволяет производить последующую временную привязку переданной информации.
В целях снижения общего объема передаваемой информации данные с датчиков угловых скоростей и ускорений обрабатываются в блоке узла сжатия данных дифференциальным методом (т.е. передается не сама физическая величина, а ее приращение).
Узел сжатия данных (на фиг.1 не показан) осуществляет уменьшение объема данных от датчиков угловых скоростей и ускорений, передаваемых во взаимодействующую систему для записи с последующей постобработки. Узел осуществляет дифференциальное кодирование полученных после фильтрации данных с датчиков путем вычисления разницы (приращения) между текущим и предыдущим значением измеряемой физической величины. Диапазон изменения вычисленных приращений меньше диапазона изменения самой физической величины, что позволяет передавать информацию меньшим количеством двоичных разрядов. Для исключения накопления ошибки, а также увеличения помехоустойчивости периодически в выходной поток информации передается сама измеряемая величина.
Следует отметить, что алгоритм БИНС состоит, в основном, из алгоритма навигации. При этом алгоритм ориентирован на вычислении и применении углов Эйлера, а также углов Крылова-Эйлера. Алгоритм навигации основан на определении проекции скорости движения ЛА относительно Земли. При этом при использовании данных алгоритмов осуществляется предварительная обработка сигналов датчиков, интегрирование в параметрах Родрига-Гамильтона, пересчет кватернионов в углы ориентации ЛА, а также расчет навигационных координат ЛА.
Способ реализуется с использованием БНО, проиллюстрированного на фиг.1. Рассмотрим принцип его функционирования. На фиг.1 показаны два узла датчиков угловых скоростей одинакового диапазона измерения. Их измерительные оси расположены ортогонально.
Также изображены два узла 2 акселерометров, причем акселерометры каждого узла 2 имеют свой диапазон измерений.
Большой диапазон обеспечивает охват всех возможностей возможных воздействий на летательный аппарат, меньший диапазон позволяет получить увеличение точности измерения линейных ускорений в наиболее востребованном диапазоне. Измерительные оси расположены ортогонально.
Магнитометр 5 - трехосевой магнитометр. Его измерительные оси расположены ортогонально.
Модуль 3 СНС - модуль с приемником спутниковых координат, который обеспечивает определение координат и скорости изменения координат летательного аппарата.
Обработка информации и расчет необходимых параметров происходят в модуле 4 навигационного обеспечения.
С момента подачи питания определяются значения нулевых сигналов датчиков угловых скоростей и линейных ускорений. Вычисляются законы поведения шумовых составляющих сигналов датчиков в текущем запуске.
При каждом запуске значения нулевых сигналов и шумовых составляющих сигналов датчиков могут существенно меняться в пределах, оговоренных в документах. После подачи питания значения отклонений и шумов практически не измены на все время непрерывной работы датчиков. Определение значений указанных параметров необходимо при каждом включении датчиков.
Сигналы датчиков угловых скоростей (ДУС), линейных ускорений, магнитометра 5 и приемника модуля 3 СНС проходят предварительную фильтрацию.
Для ДУС и акселерометров применяется фильтр Калмана. Входная частота поступления информации от датчиков - 819,2 Гц. Выходная - 409,6 Гц. Период задержки выходного сигнала - 10 мс.
Для магнитометра 5 применяется усредняющий фильтр с периодом задержки 10 мс.
Показания приемника модуля 3 СНС обрабатываются фильтром Калмана. Частота обновления входной информации 1 Гц. Задержка определения координат составляет 3 с. На основании полученных координат объекта осуществляется интерполяционное восстановление пройденной траектории с шагом 409,6 Гц.
Для ДУС и акселерометров применяется фильтрация с децимацией. Входная частота поступления информации от датчиков максимально возможная, выходная соответствует частоте работы алгоритма программы.
Применение сдвоенных ДУС соответствующих узлов на ось и пары разноточных акселерометров позволяет без дополнительных затрат существенно (в 1.4 раза) повысить точность определения угловых скоростей и вдвое - по измерению линейных перегрузок в самом необходимом диапазоне измерения.
Для магнитометра 5 применяется фильтрация с децимацией и фильтр Калмана. Суммарный период задержки выходного сигнала не превышает задержку обработки сигналов микромеханических датчиков. Выходные сигналы магнитометра 5 - абсолютное значение вектора напряженности магнитного поля и направление вектора в трехмерном пространстве относительно осей летательного аппарата.
Показания приемника модуля 3 СНС первоначально обрабатываются фильтром Калмана. Частота обновления входной информации 1 Гц на основании полученных координат объекта, на которой осуществляется интерполяционное восстановление пройденной траектории с шагом, равным дискретности расчета алгоритма программы. Общая задержка полученных навигационных данных составляет не менее трех тактов обновления спутниковых координат.
На основании непрерывно получаемых спутниковых данных осуществляется высокоточная привязка получаемых координат по времени.
Получаемые данные позволяют с достаточно высоким качеством получать значения показаний всех датчиков и с высоким качеством и сравнительно небольшой задержкой - координаты центра масс ЛА.
Особенностью структуры БНО является применение однотипных микромеханических датчиков с разными диапазонами измерения. Таким образом, совокупность получаемой информации позволяет работать с большей точностью в выбранных режимах при измерении всего диапазона параметров. Избыточность информации предназначена для увеличения контролепригодности и достоверности получаемой информации.
Для коррекции полученных сигналов используются обработанные и отфильтрованные данные спутниковой навигационной системы модуля 3 и магнитометра 5.
Физически БНО представляет собой параллелепипед, внутри которого расположены плата процессорная, источник питания, набор чувствительных элементов (гироскопов и акселерометров), плата спутниковой навигационной системы. К блоку предусмотрено подключение: взаимодействующего оборудования в виде системы управления объектом, субблока магнитометра 5, антенны СНС модуля 3.
БНО выдает координаты и углы ориентации летательного аппарата при перемещении центра масс а=±10%. Определение траектории перемещения основано на вычислении пути по показаниям низкоточных микромеханических инерциальных датчиков угловых скоростей и линейных ускорений (реализованы алгоритмы интегрированной бесплатформенной инерциальной системы навигации (БИНС)).
Параллельно с работой алгоритма БИНС осуществляется расчет траектории полета летательного аппарата на основании данных СНС, который строится с применением алгоритмов интерполирования показаний приемника СНС модуля 3.
БНО обеспечивает выполнение задач определения координат при следующих изменениях пилотажно-навигационных параметров:
- географическое координаты: широта ±90°, долгота ±180°, в том числе над горными массивами и водными поверхностями;
- диапазон путевых скоростей: от 100 км/час до 500 км/час;
- высота полета: от 300 м до 2000 м;
- курс от 0°до 360°;
- крен: ±10°;
- тангаж ±10°;
- угловые скорости по всем трем осям в пределах 30°/сек;
- линейные продольные и поперечные перегрузки ±0,7 единиц.
Рассмотрим реализацию данного способа на конкретном примере перемещения радиолокатора, являющегося целевой нагрузкой (фиг.3).
Работа радиолокатора осуществляется на летательном аппарате при полете по траектории, близкой к прямой, но имеющей отклонения. Пример траектории показан на фиг.3. Отклонения обусловлены неоднородностью воздушной массы, потоками воздуха, отклонением рулевых поверхностей летательного аппарата (ЛА) и т.д.
В момент времени 32 «СТАРТ» начинается работа целевой нагрузки - радиолокатора.
Как только команда «СТАРТ» поступает на вход блока - он начинает выполнение алгоритма расчета перемещения в пространстве центра масс летательного аппарата от точки старта до точки, отстоящей от старта на расстояние, равное n метров (см. фиг.3, поз.29-30).
Достижение точки, в которой оценка положения ЛА находится на расстоянии n метров от предыдущей точки, в которой была выдана команда на работу локатора, происходит в момент времени, крайне редко совпадающий с моментом окончания такта работы алгоритма расчета перемещения. Погрешность определения расстояния, возникающая в случае привязки к дискретам времени, оказывается недопустимо большой для решаемой задачи (синтез апертуры антенны) либо требуемая частота работы алгоритма оказывается слишком высока (что влечет за собой неоправданное усложнение аппаратуры) (см. фиг.3, поз.29-31).
Для уточнения получаемого результата на каждом такте работы алгоритма на основании оценки вектора скорости ЛА оценивается момент времени достижения удаления n метров, в рассчитанный момент времени аппаратный таймер (работающий на несколько порядков быстрее тактов работы алгоритмов) инициирует выдачу управляющей команды в радиолокатор, реальные координаты в этот момент (точнее, их оценка) вычисляются алгоритмом на следующем такте по имеющимся предыдущим оценкам координат положения ЛА и текущей оценке положения путем интерполяции. Результатом работы программы является не только команда достижения искомой точки, но и момент времени, и оценки координат летательного аппарата в момент, когда была достигнута точка удаления на n метров (см. фиг.3)
В зависимости от скорости и траектории движения ЛА определение точного момента достижения n метров с каждым тактом отличается и чем ближе мы к моменту достижения, тем точнее результат.
Предсказание времени до достижения искомой точки изначально больше, чем длительность нескольких тактов работы программы.
После достижения точки n метров осуществляется фиксация данной точки и работа алгоритма вычисления n метров начинается заново.
Коррекция работы алгоритмов работы интегрированной БИНС осуществляется на каждом шаге выполнения алгоритма работы БНО посредством определения невязки между траекториями, построенными БИНС, и спутниковой системы навигации в момент времени ранее текущего. Корректирующие коэффициенты в алгоритм БИНС определяются на основании невязки.
Каждый шаг своей работы алгоритм БИНС осуществляет определение времени выдачи координат следующей точки, отстоящей на заданное расстояние от предыдущей, на траектории движения объекта. Выдача координат летательного аппарата осуществляется в рассчитанный момент времени и не зависит от временной привязки тактовой частоты исполнения алгоритма.
Подобное применение датчиков, обладающих невысокой точностью, приемника спутниковой навигации с низкой частотой обновления информации и оптимального алгоритма работы позволяет получить высокую точность определения координат, своевременную выдачу необходимых данных в целевой комплекс, а также расширить функциональные возможности БНО за счет повышения информативности формируемых навигационных данных.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ восстановления параметров движения летательного аппарата | 2016 |
|
RU2620786C1 |
| Комплексный способ навигации летательных аппаратов | 2016 |
|
RU2646957C1 |
| Адаптивный корректор углов ориентации для БИНС | 2020 |
|
RU2749152C1 |
| Малогабаритный навигационный комплекс | 2016 |
|
RU2644632C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ И НАПРАВЛЕНИЯ ВЕТРА С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2744772C1 |
| СИСТЕМА ОЦЕНКИ ТОЧНОСТНЫХ ХАРАКТЕРИСТИК БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2006 |
|
RU2314553C1 |
| КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 1995 |
|
RU2116666C1 |
| АВИАНАВИГАТОР | 2011 |
|
RU2457438C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2000 |
|
RU2200900C2 |
| Астроинерциальная навигационная система с коррекцией по гравитационному полю Земли | 2023 |
|
RU2820600C1 |

Изобретение относится к области приборостроения и может найти применение в бесплатформенных инерциальных системах навигации (ИНС), комплексированных со спутниковой навигационной системой (СНС). Технический результат - повышение информативности. Для достижения данного результата способ обработки информации о перемещении летательного аппарата (ЛА) включает операции, связанные с получением информации об основных параметрах навигации от инерциальной навигационной системы. При этом используют спутниковую навигационную систему, по меньшей мере, один трехосевой акселерометр, один трехосевой датчик угловой скорости и, по меньшей мере, один магнитометр. Комплексирование данных СНС осуществляют с возможностью корректировки параметров навигации и ошибок, накапливающихся при функционировании инерциальных навигационных систем. При этом маркируют выбранную траекторию перемещения ЛА точками его возможного нахождения, находящимися друг относительно друга в пространстве на расстоянии, равном заранее заданной величине. Реальные координаты положения ЛА определяют с использованием данных от ИНС и СНС в дискретные моменты времени, значения которых зависят от динамики и направления угловых скоростей ЛА. 5 з.п. ф-лы, 3 ил.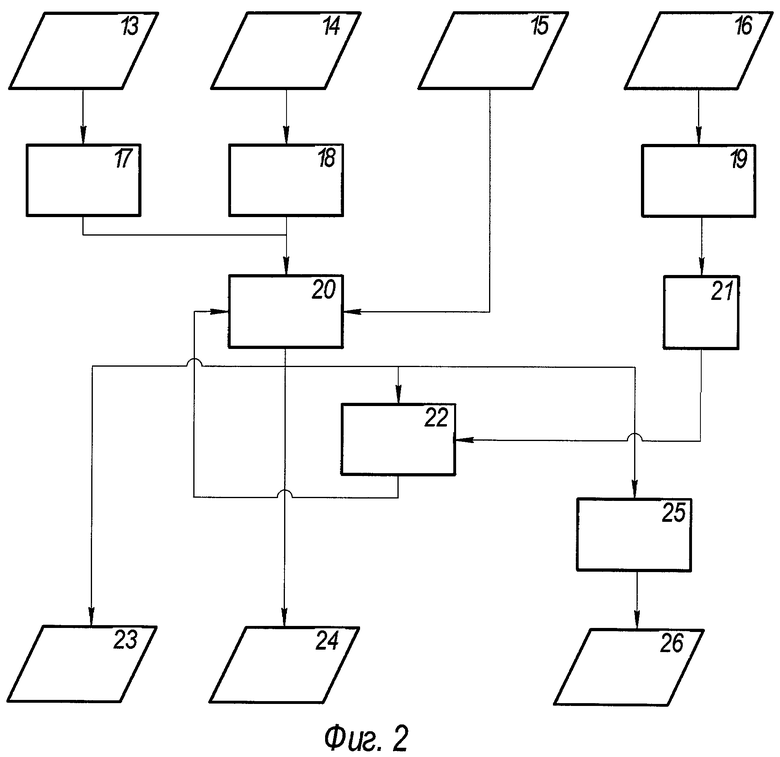
1. Способ обработки информации о перемещении летательного аппарата (ЛА), включающий получение информации о параметрах навигации от инерциальной навигационной системы (ИНС), состоящей из функционирующих в режиме регистрации информации, по меньшей мере, одного трехосевого акселерометра, по меньшей мере, одного трехосевого датчика угловой скорости, по меньшей мере, одного трехосевого магнитометра, и спутниковой навигационной системы (СНС), осуществление комплексирования данных от спутниковой и инерциальной навигационных систем с возможностью корректировки параметров навигации и ошибок, накапливающихся при функционировании ИНС, определение по полученным от ИНС и СНС данным вектора притяжения Земли и использование полученного результата с учетом вычисленных углов ориентации ЛА при обнулении показаний, по меньшей мере, одного акселерометра при изменении величины проекции вектора притяжения Земли на ось ЛА и изменении ориентации ЛА в пространстве, расчет положения перемещающегося ЛА на основе данных, полученных от приемника СНС, данных о направлении вектора магнитного поля и данных о значениях угловых скоростей ЛА, при этом маркируют выбранную траекторию перемещения ЛА точками его возможного нахождения, находящимися относительно друг друга в пространстве на расстоянии, равном заранее заданной величине, реальные координаты положения ЛА с использованием данных от ИНС и СНС определяют в дискреты времени, величины которых зависят от динамики и направления угловых скоростей ЛА при его перемещении, с учетом ранее полученных оценок координат положений ЛА путем интерполирования, для уточнения расстояния перемещения ЛА в каждую дискрету времени оценивают упреждающие значения времени и момента достижения точки прогнозируемого окончания перемещения ЛА, причем в каждую дискрету времени осуществляют коррекцию вычисленного положения ЛА с учетом оценки невязки и зарегистрированного, по меньшей мере, одним магнитометром модуля и направления магнитного поля, при этом невязку вычисляют как расхождение между рассчитанной траекторией ЛА на основе данных от приемника СНС и выбранной траекторией ЛА.
2. Способ по п.1, отличающийся тем, что функционирование приемника СНС во времени синхронизируют со всемирным координированным временем.
3. Способ обработки информации по п.1, отличающийся тем, что данные, поступающие от приемника СНС, передают в виде, по меньшей мере, одного информационного потока с возможностью географической регистрации местоположения ЛА.
4. Способ по п.1, отличающийся тем, что при перемещении ЛА между точками его возможного нахождения, находящимися относительно друг друга в пространстве на расстоянии, равном заранее заданной величине, передают информацию о целевой нагрузке, например информацию о местоположении радиолокатора.
5. Способ по п.1, отличающийся тем, что информацию от, по меньшей мере, одного акселерометра и, по меньшей мере, одного датчика угловой скорости, полученную в момент начальной калибровки ИНС, используют для устранения смещений в их показаниях.
6. Способ по п.3, отличающийся тем, что, по меньшей мере, один информационный поток, поступающий от приемника СНС, вводят в информационно-логическую сеть для обработки информации о перемещении ЛА, используя, по меньшей мере, один заранее установленный протокол обмена данными.
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМОЙ | 2007 |
|
RU2348903C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2264598C1 |
| БАБИЧ О.А | |||
| Обработка информации в навигационных комплексах | |||
| - М.: Машиностроение, 1991, с.171, 185-188 | |||
| РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2184381C1 |
| КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 1995 |
|
RU2116666C1 |
| US 6041280 А, 21.03.2000 | |||
| DE 10146333 A1, 02.05.2002. | |||

