ОБЛАСТЬ ТЕХНИКИ
Данное изобретение в целом относится к навигационным системам для летательных аппаратов. В частности, данное изобретение относится к системе для управления полетом летательного аппарата и способу управления полетом летательного аппарата.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
В настоящее время беспилотные авиационные системы (БАС) выполнены с возможностью дистанционного управления с наземных станций. Таким образом, пилот на земле дистанционно управляет маневрами во время полета беспилотной авиационной системы. Также, между дистанционно действующим на земле пилотом и службой управления воздушным движением (УВД) может быть установлена связь, однако данная связь часто зависит от возможности доступа к каналу передачи данных. В связи с этим аспектом и другими определенными требованиями беспилотные авиационные системы не могут совершать полеты в пределах определенных воздушных пространств, таких как гражданские воздушные пространства. Следовательно, воздушные пространства, разрешенные для полетов беспилотного летательного аппарата, в большинстве случаев ограничены. Воздушные пространства, разрешенные для полетов беспилотного летательного аппарата, ограничены воздушными пространствами, выделенными для военных самолетов, или другими воздушными пространствами, в которых гражданские самолеты не совершают полетов. Соответственно, использование беспилотного летательного аппарата, особенно в Европе, чрезвычайно затруднительно и ограничено. В большинстве случаев правительственные постановления ограничивают использование беспилотных авиационных систем в определенных воздушных пространствах.
В патенте Канады 2836870 (А1) описан способ и система управления беспилотным летательным аппаратом (БПЛА). План полета беспилотного летательного аппарата основан на траектории, по которой оно должно следовать. Таким образом, в беспилотные летательные аппараты встроены различные датчики, выполненные с возможностью вычисления траектории этого летательного аппарата.
В заявке на патент США 2009/030566 (А1) описано управление полетом беспилотных летательных аппаратов, выполняющих групповой полет. В указанной заявке описан алгоритм управления групповым полетом беспилотных летательных аппаратов.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Цель данного изобретения заключается в создании усовершенствованной системы управления полетом летательного аппарата. Эта цель достигается благодаря изобретению, раскрытому в независимых пунктах формулы изобретения. Дополнительные типовые варианты выполнения изложены в зависимых пунктах формулы изобретения и также в следующем описании.
Согласно первому аспекту данного изобретения, описана система сопровождения для летательных аппаратов, содержащая первый блок связи, выполненный с возможностью установки на первом летательном аппарате, и с возможностью передачи определенных на первом летательном аппарате координат положения первой точки маршрута во второй блок связи, выполненный с возможностью его установки на втором летательном аппарате для направления полета второго летательного аппарата к указанному положению точки маршрута.
Посредством первого блока связи и второго блока связи может быть установлена связь между первым летательным аппаратом и вторым летательным аппаратом. Координаты положения точки маршрута могут принадлежать определенной точке в воздушном пространстве. Соответственно, пространственные координаты могут быть определены в различных системах отсчета посредством первого вычислительного элемента, который также может быть встроен в первый летательный аппарат.
Первый летательный аппарат может дополнительно содержать радиолокатор, который выполнен с возможностью работы в активном или пассивном режиме, и дисплей пилота. На дисплей пилота может быть выведена информация для пилота, например, эксплуатационные данные полета первого и второго летательных аппаратов. В качестве системы отсчета для определения координат положения точки маршрута может быть использована всемирная геодезическая система координат 1984 года (WGS 84), которая является системой с началом в центре Земли, инерциальной системой и/или связанной системой координат летательного аппарата. Первый и второй блоки связи могут представлять собой двусторонние системы связи. Благодаря двусторонней системе связи обеспечивается возможность как приема, так и передачи или отправки данных. Например, первый вычислительный элемент первого летательного аппарата определяет координаты положения точки маршрута, принадлежащие определенной точке в воздушном пространстве, и передает данные координаты положения точки маршрута посредством первого блока связи во второй блок связи и, соответственно, второму летательному
аппарату. Второй вычислительный элемент во втором летательном аппарате выполнен с возможностью обработки координат положения точки маршрута после того, как они были получены вторым блоком связи. После обработки координат положения точки маршрута второй летательный аппарат может быть автоматическое направлен к местоположению данной точки маршрута. Точка маршрута может быть точкой в воздушном пространстве, через которую первый летательный аппарат пролетал в определенный момент времени. Другими словами, первый летательный аппарат пролетает через определенную точку в воздушном пространстве, определяет координаты положения указанной точки, так называемой точки маршрута, а затем передает координаты указанной точки маршрута, обеспечивая возможность направления полета второго летательного аппарата к данной точке маршрута для того, чтобы пролететь через эту точку, как и первый летательный аппарат в более ранний момент времени. Соответственно, этот маневр может быть назван процессом сопровождения. При выполнении указанного маневра первый летательный аппарат может иметь ведущий участок полета, а второй летательный аппарат может иметь сопровождающий участок полета. Первый летательный аппарат физически может находиться перед вторым летательным аппаратом относительно направления полета. Первый летательный аппарат также может быть расположен выше, ниже или позади второго летательного аппарата или каким-либо другим образом во время процесса сопровождения. Другими словами, необязательно, чтобы полет второго летательного аппарата был направлен к точке маршрута, через которую пролетел первый летательный аппарат. Точка маршрута, к которой направлен полет второго летательного аппарата, может быть, таким образом, определена посредством пространственной ориентации другой определенной точки маршрута, через которую пролетел первый летательный аппарат. Однако, и первый, и второй летательные аппараты могут лететь на заданном расстоянии друг от друга, при этом второй летательный аппарат следует за первым летательным аппаратом. Дополнительно к координатам положения точки маршрута первым вычислительным элементом первого летательного аппарата может быть вычислено значение времени для этой точки маршрута. Например, это значение времени может быть моментом времени, в который первый летательный аппарат пролетает через указанную точку маршрута. Так как точка маршрута может иметь три пространственные координаты, описывающие положение точки маршрута, и значение времени, данная точка маршрута также может быть определена как 4-D точка маршрута (четырёхкоординатная точка маршрута). Первый летательный аппарат может быть выполнен с возможностью определения координат положений нескольких точек маршрута. Таким образом, каждая точка маршрута определяется тремя пространственными координатами и одним значением времени. В таком случае данные о скорости первого летательного аппарата могут быть получены по меньшей мере из двух различных точек маршрута, через которые он пролетел. Эта информация о скорости первого летательного аппарата может быть передана второму летательному аппарату, который затем может подстроить свою скорость под скорость первого летательного аппарата. Однако, возможен вариант, когда первый летательный аппарат подстраивает свою скорость под скорость второго летательного аппарата и, соответственно, под характеристики второго летательного аппарата. Это обусловлено тем, что скорость второго летательного аппарата зависит от его летных характеристик, например, от диапазона эксплуатационных режимов полёта. Другими словами, управление вторым летательным аппаратом может быть выполнено по 4-D плану полета, составленному по несколькими 4-D точкам маршрута. Первый летательный аппарат может представлять собой летательный аппарат с неподвижным или вращающимся крылом. Первый летательный аппарат также может представлять собой гражданский самолет или военный самолет, такой как, например, тактический самолет, транспортный самолет или реактивный истребитель. Второй летательный аппарат может представлять собой беспилотны й летательный аппарат (БПЛА), беспилотную авиационную систему (БАС) или дистанционно пилотируемую авиационную систему (ДПАС). Кроме того, второй летательный аппарат может представлять собой пилотируемый летательный аппарат. Однако, первый летательный аппарат выполнен с возможностью определения координат положения точки маршрута или координат положений нескольких точек маршрута и с возможностью передачи данных координат второму летательному аппарату. Первый летательный аппарат также может быть выполнен с возможностью приема информации от второго летательного аппарата, например, информации о положении, ориентации и/или скорости второго летательного аппарата. Однако, второй летательный аппарат может быть выполнен с возможностью направления полета к положению точки маршрута или к положениям нескольких точек маршрута для того, чтобы следовать за первым летательным аппаратом. Такое решение обеспечивает возможность удовлетворить потребности в беспилотной авиационной системе с возможностью управления за пределами специально выделенных военных воздушных пространств. Эта возможность обусловлена тем, что беспилотная авиационная система, управляемая с земли, может быть возвращена к заданному местоположению в случае аварийной ситуации. Аварийной ситуацией может быть потеря линии передачи данных между беспилотной авиационной системой и дистанционно действующим на земле пилотом, или ошибка управления, приводящая к неуправляемому полету беспилотной авиационной системы. Поскольку беспилотная авиационная система выполнена с возможностью автоматического сопровождения пилотируемого летательного аппарата по определенным точкам маршрута, пилотируемый
летательный аппарат может работать в качестве ведущего летательного аппарата, направляющего беспилотный летательный аппарат так, что беспилотный летательный аппарат покидает воздушное пространство, неразрешенное для его полета, или в случае аварийной ситуации запрашивает разрешение на аварийную посадку. Описанная навигационная система для летательного аппарата может быть использована во всех летательного аппаратах, которым не разрешено летать в пределах определенных воздушных пространств, например, в летательном аппарате без навигационной системы и
систем наблюдения, таких как Mode S Transponder или Traffic Alert and Collision Avoidance Systems. Таким образом, беспилотная авиационная система может быть применена во всех воздушных пространствах, таких как, например, гражданские воздушные пространства и, соответственно, ее использование не ограничивается специально выделенными военными воздушными пространствами. Такое решение также может обеспечить возможность для беспилотных авиационных систем получить разрешение на полет в пределах неконтролируемых воздушных пространств с автономным летательным
аппаратом, например, в пределах таких воздушных пространств, как E, F и G.
Другое преимущество заключается в том, что основная часть целевой нагрузки находится в первом летательном аппарате, таким образом, не требуется преобразовывать существующие беспилотные авиационные системы, или требуются только незначительные преобразования.
В соответствии с другим аспектом данного изобретения описана система сопровождения для летательных аппаратов. Данная система содержит первый блок связи, выполненный с возможностью установки на первом летательном аппарате, с возможностью передачи опознавательного сигнала второму летательному аппарату, после приема которого осуществляется сопровождение первого летательного аппарата. Опознавательный сигнал может представлять собой сигнал маяка.
Таким образом, второй летательный аппарат может содержать радиолокационную систему, выполненную с возможностью приема опознавательного сигнала, отправленного или излучаемого первым летательным аппаратом для выполнения идентификации первого летательного аппарата.
Опознавательный сигнал может быть отправлен из первого блока связи или излучен первым блоком связи первого летательного аппарата. После идентификации первого летательного аппарата второй летательный аппарат следует за первым летательным аппаратом, например, в случае аварийной ситуации. Радиолокационная система может быть частью второго блока связи, или она может быть выполнена как отдельный компонент, присоединенный ко второму блоку связи так, что и второй блок связи, и радиолокационная система объединены внутри второго летательного аппарата. Однако, второй летательный аппарат может сопровождать первый летательный аппарат, используя свою собственную радиолокационную систему, так что определение точек маршрута первым летательным аппаратом не является обязательным для направления полета второго летательного аппарата к заданному местоположению. Второй летательный аппарат может иметь функцию отслеживания, обеспечивающую возможность определения текущего положения первого летательного аппарата с помощью опознавательного сигнала. Радиолокационная система второго летательного аппарата может, например, определить угловое местоположение или положение первого летательного аппарата в пассивном режиме путем отслеживания опознавательного сигнала. Радиолокационная система также может быть выполнена с возможностью определения углового местоположения первого летательного аппарата посредством отраженного сигнала, отраженного от первого летательного аппарата, который затем может быть принят радиолокационной системой второго летательного аппарата в активном режиме. Однако, активный режим радиолокатора, например, использующего отраженный сигнал, может быть применен для определения дальности или расстояния между первым и вторым летательными аппаратами. Определение местоположения первого летательного аппарата и дальнейшего курса полета или траектории полета второго летательного аппарата может быть осуществлено вычислительным элементом второго летательного аппарата.
В соответствии с вариантом выполнения данного изобретения первый летательный аппарат является пилотируемым летательным аппаратом. Таким образом, первым летательным аппаратом может управлять пилот, который направляет полет первого летательного аппарата для того, чтобы задать точки маршрута, определяемые первым вычислительным элементом.
В соответствии с другим вариантом выполнения данного изобретения второй летательный аппарат является беспилотным летательным аппаратом.
Второй летательный аппарат может быть беспилотным летательным аппаратом, беспилотной авиационной системой или дистанционно пилотируемой авиационной системой. Второй летательный аппарат может быть военным самолетом, выполненным с возможностью дистанционного управления пилотом с земли. Следовательно, второй летательный аппарат обеспечивает линию связи с блоком связи на земле. Второй летательный аппарат может сдержать второй вычислительный элемент, принимающий информацию от наземного блока связи посредством второго блока связи для направления полета второго летательного аппарата. Второй вычислительный элемент второго летательного аппарата также может принимать такую информацию от первого блока связи первого летательного аппарата. Данная информация содержит по меньшей мере координаты положения точки маршрута. В предпочтительном варианте выполнения эта информация содержит координаты положений нескольких точек маршрута. Так как данные точки маршрута могут образовывать курс полета первого летательного аппарата, второй вычислительный элемент второго летательного аппарата может направлять полет второго летательного аппарата для осуществления им сопровождения первого летательного аппарата.
В соответствии с другим вариантом выполнения данного изобретения первый летательный аппарат выполнен с возможностью определения координат положений нескольких точек маршрута, определяемых в системе отсчета. В этом отношении, указанные несколько точек маршрута вместе образуют траекторию полета первого летательного аппарата. Относительная дальность между указанными точками маршрута может быть одинаковой. Однако, относительная дальность между указанными точками маршрута может и изменяться. Траектория полета первого летательного аппарата может быть описана произвольным количеством точек маршрута. Чем больше точек маршрута использовано для определения траектории полета первого летательного аппарата, тем выше точность описания траектории его полета. Однако данная траектория полета может представлять собой траекторию, по которой летит второй летательный аппарат, когда его направляют от одной точки маршрута к другой. В качестве системы отсчета может быть использована система WGS 84, связанная система координат летательного аппарата или
инерциальная система.
В соответствии с другим вариантом выполнения данного изобретения первый летательный аппарат выполнен с возможностью определения значения времени для каждой из указанных нескольких точек маршрута. Таким образом, первый летательный аппарат, например, первый вычислительный элемент первого летательного аппарата определяет четыре координаты, описывающие положение точки маршрута в определенный момент времени. Зная время, при котором первый летательный аппарат пролетел через различные точки маршрута, можно определить скорость первого летательного аппарата. Так как координаты положений нескольких точек маршрута с соответствующими значениями времени передаются во второй блок связи, второй вычислительный элемент второго летательного аппарата может обработать эти данные для направления полета к положениям нескольких точек маршрута и подстраивания скорости второго летательного аппарата к скорости первого летательного аппарата. Однако в большинстве случаев скорость первого
летательного аппарата может быть приведена в соответствие со скоростью второго летательного аппарата, что может быть необходимо в случае, если эксплуатационные возможности или характеристики второго летательного аппарата ограничены.
В соответствии с еще одним вариантом выполнения данного изобретения второй летательный аппарат выполнен с возможностью следования траектории полета первого летательного аппарата во время выполнения полета первым и вторым летательными аппаратами. Таким образом, обеспечивается возможность управления полетом второго летательного аппарата, если линия связи или линия передачи данных с пилотом на земле прервана или потеряна во время выполнения полета вторым летательным аппаратом. Первый летательный аппарат также может выполнять полет, при этом направляя второй летательный аппарат к определенным точкам маршрута. Поскольку расстояние между первым и вторым летательными аппаратами может быть произвольно изменено во время полета обоих летательных аппаратов, это обеспечивает возможность использовать линии передачи данных или средства связи между первым и вторым летательными аппаратами, которые ограничены связью на коротком расстоянии. Другими словами, средства связи могут быть использованы при максимальной дальности, так как первый летательный аппарат может приближаться ко второму летательному аппарату до тех пор, пока сближение обоих летательных аппаратов не станет достаточным для надлежащей работы используемых средств связи.
В соответствии с другим вариантом выполнения данного изобретения первый летательный аппарат дополнительно содержит первый блок обработки данных. Первый блок обработки данных может содержать вычислительный элемент, например, первый вычислительный элемент. Первый блок обработки данных выполнен с возможностью определения положения второго летательного аппарата на основе сигнала, отправленного из второго блока связи в первый блок связи. Положение второго летательного аппарата может быть определено в любой системе координат или системе отсчета, как, например, WGS 84, инерциальные системы или связанные системы координат летательного аппарата. Сигнал, отправленный из второго блока связи, может быть принят, например, антенной. Следовательно, первый блок связи может содержать радиолокатор, выполненный с возможностью работы в активном и/или пассивном режиме. Радиолокатор может содержать антенну с электронным управлением луча. Радиолокатор первого летательного аппарата может принимать информацию от второго летательного аппарата. Соответственно, радиолокатор первого летательного аппарата может быть выполнен с возможностью охвата определенного углового сектора в направлении хвостовой части первого летательного аппарата. Ориентация указанного радиолокатора может быть отрегулирована в пределах 50º в вертикальном и/или горизонтальном направлении. Следовательно, радиолокатор может быть установлен с возможностью поворота в первом летательном аппарате.
В соответствии с еще одним вариантом выполнения данного изобретения указанный сигнал представляет собой кодированный сигнал. Первый блок обработки данных первого летательного аппарата выполнен с возможностью преобразования сигнала, отправленного из второго блока связи в первый блок связи. Кодирование сигнала может препятствовать несанкционированному доступу к информации, передаваемой вторым летательным аппаратом, например, беспилотным летательным аппаратом. Другими словами, первый летательный аппарат, прежде всего, должен идентифицироваться перед началом установки связи со вторым летательным аппаратом. После идентификации первого летательного аппарата первый блок связи может принять сигнал, отправленный из второго блока связи второго летательного аппарата, причем указанный сигнал может содержать информацию о положении второго летательного аппарата. Кроме того, после подтверждения первый блок связи может запросить идентификацию второго летательного аппарата для подтверждения того, что этот летательный аппарат является именно тем летательным аппаратом, который отслеживается первым летательным аппаратом или с которым устанавливается связь.
При выполнении кодирования сигнала для установления связи между первым и вторым летательными аппаратами необходимо использовать шифровальные коды. Шифровальные коды могут представлять собой коды системы безопасности, и для их использования может потребоваться введение специального алгоритма для обеспечения передачи информации между первым и вторым летательными аппаратами.
В соответствии с другим вариантом выполнения данного изобретения первый блок обработки данных выполнен с возможностью определения эксплуатационных данных второго летательного аппарата из следующей группы: скорость, высота полета и коэффициент загрузки. По этим данным может быть определен диапазон эксплуатационных режимов второго летательного аппарата. Однако диапазон эксплуатационных режимов также может быть определен заранее на основании типа летательного аппарата и возможного ухудшения или приведения к стандартным условиям эксплуатационных характеристик второго летательного аппарата, переданных в виде данных о текущем техническом состоянии, как будет пояснено далее. Диапазон эксплуатационных режимов выводится на дисплее пилота первого летательного аппарата. Затем пилот первого летательного аппарата может привести в соответствие эксплуатационные данные первого летательного аппарата с эксплуатационными данными второго летательного аппарата. Другими словами, эксплуатационные характеристики первого летательного аппарата могут быть приведены в соответствие с эксплуатационным характеристикам второго летательного аппарата, например, беспилотного летательного аппарата. Скорость первого летательного аппарата, например, может быть приведена в соответствие со скоростью второго летательного аппарата, что обеспечивает возможность для второго летательного аппарата следовать за первым летательным аппаратом. Соответственно, пилот первого летательного аппарата может вручную привести в соответствие летные характеристики или эксплуатационные данные первого летательного аппарата с летными характеристиками или эксплуатационными данными второго летательного аппарата. Кроме того, данный процесс приведения характеристик в соответствие может быть выполнен автоматически, например, посредством первого вычислительного элемента первого летательного аппарата. Эксплуатационные данные могут содержать, например, данные о скорости и высоте полета летательного аппарата.
В соответствии с еще одним вариантом выполнения данного изобретения первый летательный аппарат дополнительно содержит дисплей, который выполнен с возможностью отображения по меньшей мере эксплуатационных данных второго летательного аппарата. Следовательно, высота полета, дальность между первым и вторым летательными аппаратами, скорость и диапазон эксплуатационных режимов как первого, так и второго летательного аппарата могут быть отображены на дисплее первого летательного аппарата. Таким образом, отображенная информация о летных характеристиках, например, эксплуатационные данные первого и/или второго летательного аппарата, может помочь пилоту при приведении в соответствие летных характеристик, например, эксплуатационных данных первого летательного аппарата с летными характеристиками второго летательного аппарата. В соответствии с другим вариантом выполнения данного изобретения положение второго летательного аппарата определяется в земной системе координат. Например, положение второго летательного аппарата определяется в системе WGS 84. Также положение второго летательного аппарата может быть определено в связанной системе координат летательного аппарата или в инерциальной системе. Его положение может быть определено в Декартовой системе координат, сферической или цилиндрической системе координат. Однако местоположение второго летательного аппарата определяется радиолокатором в активном и пассивном режиме или, как вариант, любым другим средством для измерения угловых параметров направления на цель и дальности. Например, положение второго летательного аппарата может быть определено в локальной системе координат, такой как, например, связанная система координат летательного аппарата или инерциальная система, причем локальные системы отсчета могут быть использованы для промежуточного этапа вычислений при определении положения летательного аппарата. Такие промежуточные этапы могут предшествовать окончательному определению местоположения второго летательного аппарата, причем окончательное определение местоположения выполняют, например, с помощью глобальной системы навигации, такой, как, например, всемирная геодезическая система координат 1984 (WGS 84). В соответствии с другим вариантом выполнения данного изобретения первый блок связи содержит радиолокатор, выполненный с возможностью приема сигнала маяка, отправленного из второго блока связи, в пассивном режиме, что позволяет определить угловое положение второго летательного аппарата относительно первого летательного аппарата.
Кроме того, первый блок связи и радиолокатор могут быть выполнены как отдельные элементы, которые могут быть соединены друг с другом или с первым вычислительным элементом, например, радиолокатор может быть пространственно отделен от первого блока связи. Радиолокатор может быть установлен с возможность поворота внутри первого летательного аппарата так, что сигнал от второго летательного аппарата может быть принят указанным радиолокатором. Радиолокатор может быть частью первого блока связи первого летательного аппарата. Для приема сигнала из второго блока связи радиолокатор, установленный с возможность поворота внутри первого летательного аппарата, может быть наведен в различных направлениях. В пассивном режиме радиолокатор выявляет и отслеживает сигнал согласования, например, сигнал маяка, отправленный вторым летательным аппаратом для того, чтобы определить угловые параметры направления на цель второго летательного аппарата относительно первого летательного аппарата. Сигнал согласования специально передается отслеживаемым летательным аппаратом, например, вторым летательным аппаратом. Угловое положение второго летательного аппарата относительно первого летательного аппарата может быть определено с учетом положения второго летательного аппарата в связанной системе координат первого летательного аппарата. Угловое положение второго летательного аппарата относительно первого летательного аппарата также может быть определено в земной системе координат, например, WGS 84. Угловое положение или местоположение второго летательного аппарата также может быть определено посредством отраженного сигнала вместо отслеживания сигнала маяка. Следовательно, указанный радиолокатор может работать в активном режиме.
В соответствии с еще одним вариантом выполнения данного изобретения первый блок связи содержит радиолокатор, выполненный с возможностью приема сигнала, отправленного из второго блока связи или отраженного вторым летательным аппаратом, в активном режиме, что позволяет определить дальность между первым и вторым летательными аппаратами. Сигнал, принятый радиолокатором в активном режиме, может представлять собой отраженный сигнал. Когда радиолокатор первого летательного аппарата в активном режиме направляет луч на второй летательный аппарат, сигнал, отраженный от второго летательного аппарата может не быть сигналом согласования. Отраженный сигнал может быть сигналом, отраженным от второго летательного аппарата в направлении первого летательного аппарата. Дальность означает расстояние между первым и вторым летательными аппаратами. С учетом дальности и угловых параметров направления на цель второго летательного аппарата относительно первого летательного аппарата может быть получено местоположение второго летательного аппарата. Соответственно, во время полета обоих летательных аппаратов может быть определено текущее положение второго летательного аппарата, который следует за первым летательным аппаратом. Отраженный сигнал может представлять собой сигнал, излучаемый радиолокатором первого летательного аппарата, поступающий ко второму летательному аппарату, от которого он отражается и затем поступает обратно к радиолокатору первого летательного аппарата. Время прохождения данного сигнала может быть определено для того, чтобы вычислить расстояние между первым и вторым летательными аппаратами. Данный сигнал может быть отражен, например, наружной обшивкой второго летательного аппарата. Однако отраженный сигнал также может быть использован для определения углового положения второго летательного аппарата, когда радиолокатор работает в активном режиме. Таким же образом второй летательный аппарат может определять угловое положение или местоположение первого летательного аппарата посредством отраженного сигнала. Соответственно, второй летательный аппарат может быть выполнен с возможностью излучения сигнала, который отражается от поверхности первого летательного аппарата, и затем возвращается в виде отраженного сигнала ко второму летательному аппарату, что позволяет определить угловое положение первого летательного аппарата относительно второго летательного аппарата, например посредством радиолокатора, встроенного во второй летательный аппарат. Другими словами, радиолокатор, предназначенный для определения как углового местоположения другого летательного аппарата, так и дальности между указанными летательными аппаратами, может быть встроен в первый или второй летательный аппарат. Кроме того, любое средство для определения углового положения и дальности может быть встроено или установлено на первом или на втором летательном аппарате, такое как, например, электрооптическая система (ЭО) и/или инфракрасная система (ИК). Кроме того, могут быть применены другие системы, такие, как, например, лазерная система обнаружения и измерения дальности (лидар) и/или системы наведения, подобные системам, применяемым в ракетных системах.
В соответствии с другим вариантом выполнения данного изобретения сигнал, отправленный из второго блока связи в первый блок связи, содержит информацию для идентификации второго летательного аппарата. Использование сигнала маяка, отправленного первому летательному аппарату, например, пилотируемому летательному аппарату, обеспечивает возможность использовать относительно небольшую антенну радиолокатора для приема и отслеживания сигнала маяка. Сигнал маяка может быть достаточно сильным для того, чтобы обеспечить точное одноимпульсное отслеживание второго летательного аппарата с помощью небольшой антенны радиолокатора. С помощью сигнала маяка различные данные могут быть отправлены первому летательному аппарату, например, текущее положение второго летательного аппарата или данные о текущем техническом состоянии второго летательного аппарата. Данные о текущем техническом состоянии могут содержать информацию о повреждении систем второго летательного аппарата, в результате которого ухудшаются летные характеристики второго летательного аппарата. Такое повреждение может быть следствием, например, неисправного двигателя.
На системах летательного аппарата может образоваться обледенение, ухудшающее эксплуатационные характеристики летательного аппарата. В другом варианте выполнения первый летательный аппарат может отправлять сигнал маяка второму летательному аппарату, при этом второй летательный аппарат снабжен системой слежения, так что второй летательный аппарат отслеживает первый летательный аппарат с помощью сигнала маяка, отправленного из первого блока связи во второй блок связи. Следует понимать, что и угловые параметры направления на цель, и расстояние определяются для установления местоположения второго летательного аппарата относительно первого летательного аппарата. Для определения местоположения требуется два различных режима радиолокатора. Угловые параметры направления на цель второго летательного аппарата относительно первого летательного аппарата могут быть определены радиолокатором в пассивном режиме, когда радиолокатор отслеживает мощный сигнал маяка в моноимпульсном режиме. Расстояние между вторым и первым летательными аппаратами определяется радиолокатором в активном режиме, так что расстояние определяется путем измерения времени, которое необходимо для прохождения сигнала или отраженного сигнала, исходящего от первого летательного аппарата, ко второму летательному аппарату и обратно от второго летательного аппарата к первому летательному аппарату. Сигнал может быть отражен от наружной обшивки второго летательного аппарата, таким образом, сигнал может быть назван отраженным сигналом. Отраженный сигнал после его отражения от наружной обшивки второго летательного аппарата может быть принят первым блоком связи, например, радиолокатором. Другие средства измерения углового положения и дальности, посредством которых может быть определено положение и ориентация другого летательного аппарата, в альтернативном варианте могут быть встроены в первый
летательный аппарат и/или во второй летательный аппарат. В таких средствах могут быть использованы электрооптические системы (ЭО) и/или инфракрасные системы (ИК). Могут быть применены и другие системы, такие как, например, лазерная система обнаружения и измерения дальности (лидар) и/или системы наведения, подобные системам, применяемым в ракетных системах. Такие системы могут быть использованы, например, вместо радиолокатора, работающего в пассивном и активном режимах.
В соответствии с другим аспектом данного изобретения предложен способ сопровождения для летательных аппаратов, включающий различные этапы. На одном из этапов указанного способа определяют координаты положения точки маршрута первого летательного аппарата. На другом этапе указанного способа координаты положения точки маршрута передают из первого блока связи первого летательного аппарата во второй блок связи второго летательного аппарата. На другом этапе указанного способа второй летательный аппарат направляют к указанному положению точки маршрута. Направление второго летательного аппарата к положению данной точки маршрута может быть выполнено на основе переданных координат положения точки маршрута, которые были определены первым летательным аппаратом. Данный способ может включать другие этапы, такие как, например, определение первым летательным аппаратом координат положения второй точки маршрута. Координаты положения второй точки маршрута затем могут быть переданы от первого блока связи первого летательного аппарата во второй блок связи второго летательного аппарата. На другом этапе второй летательный аппарат направляется к положению второй точки маршрута. Такую же процедуру можно повторить для произвольного количества точек маршрута, и на основе нескольких точек маршрута может быть получена траектория полета для второго летательного аппарата. Благодаря заявленному способу второй летательный аппарат может сопровождать первый летательный аппарат, например, в случае аварийной ситуации. При наличии технической возможности, однако, без явного упоминания, сочетания любых вариантов выполнения данного изобретения, рассмотренных выше и далее, могут быть вариантами выполнения указанной системы управления полетом летательного аппарата.
Эти и другие аспекты данного изобретения будут очевидны из изложенных ниже вариантов выполнения и разъяснены со ссылкой на них.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
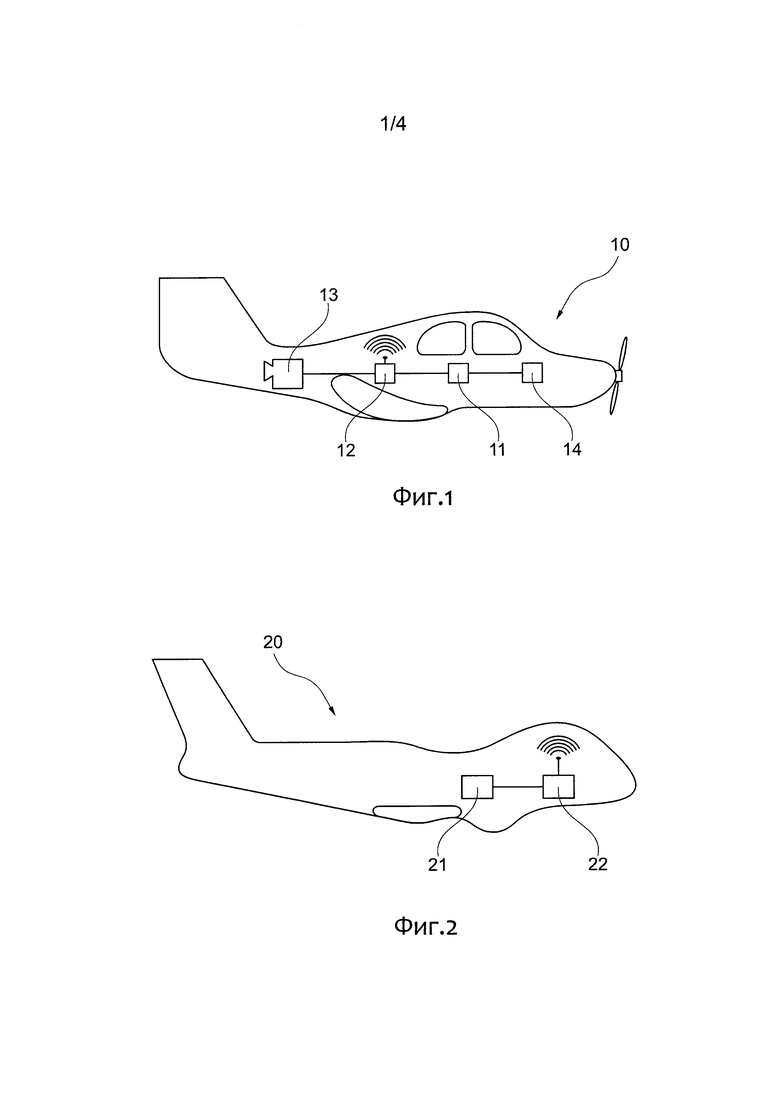
Фиг.1 изображает первый летательный аппарат с первым блоком связи, первым блоком обработки данных, дисплеем и радиолокатором в соответствии с вариантом выполнения данного изобретения.
Фиг.2 изображает второй летательный аппарат со вторым блоком связи и вторым блоком обработки данных в соответствии с вариантом выполнения данного изобретения.
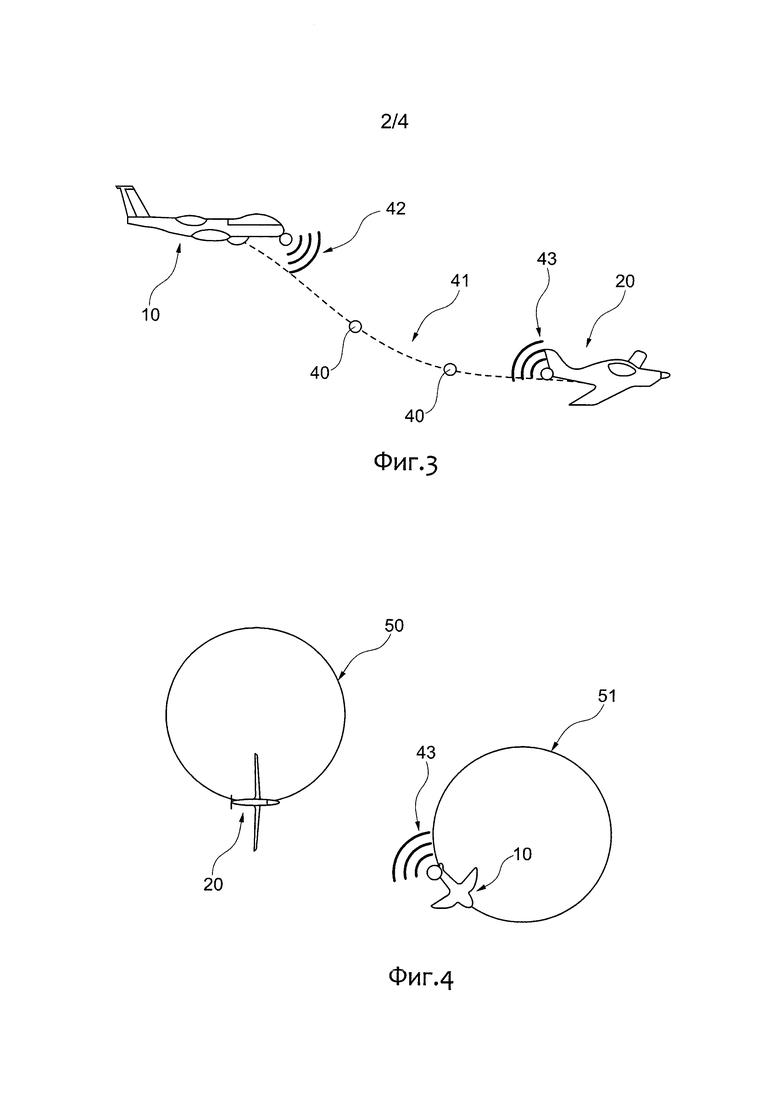
Фиг.3 изображает первый летательный аппарат, направляющий полет второго летательного аппарата на основе определенных точек маршрута, в соответствии с вариантом выполнения данного изобретения.
Фиг.4 изображает круговую траекторию полета первого летательного аппарата и второго летательного аппарата в соответствии с вариантом выполнения данного изобретения.
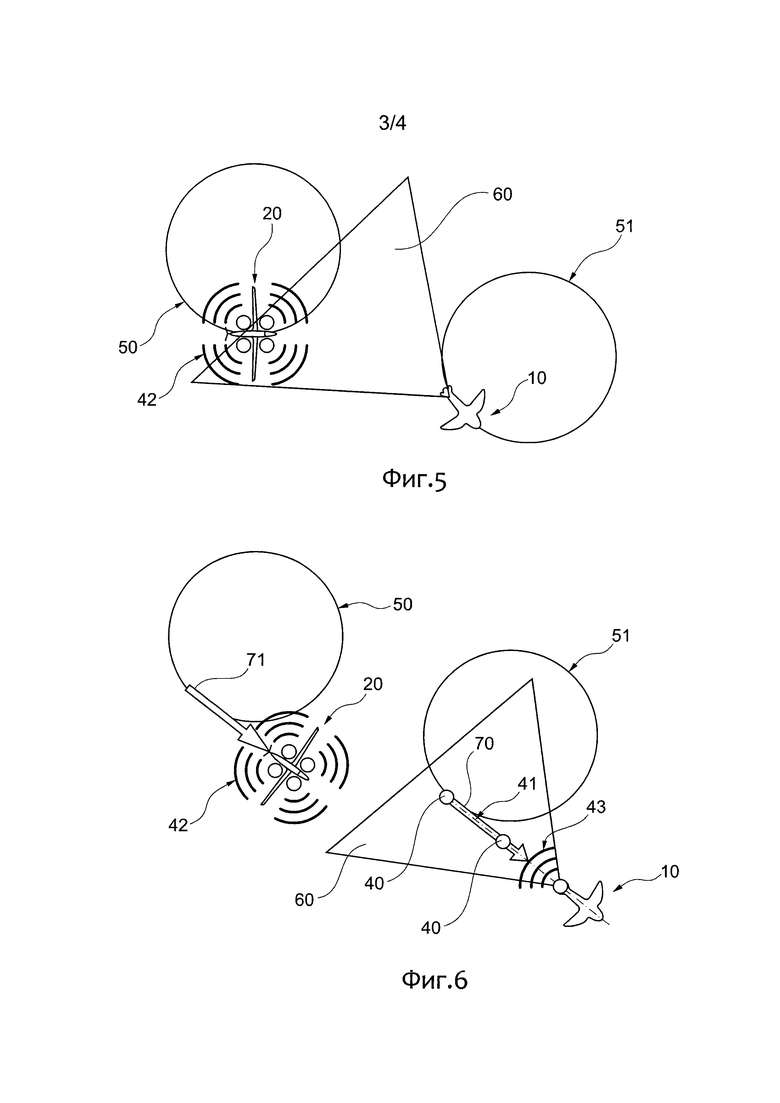
Фиг.5 иллюстрирует прием сигнала связи, отправленного вторым летательным аппаратом первому летательному аппарату в соответствии с вариантом выполнения данного изобретения.
Фиг.6 изображает точки маршрута, заданные первым летательным аппаратом для направления полета второго летательного аппарата, в соответствии с вариантом выполнения данного изобретения.
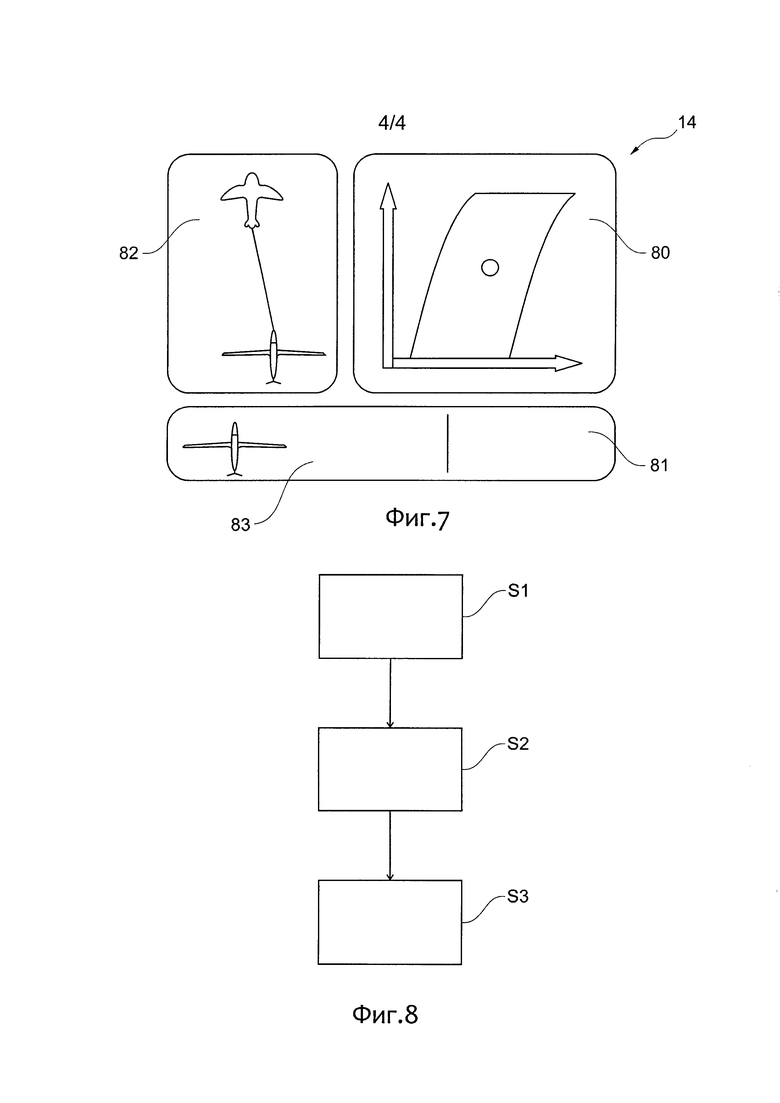
Фиг.7 изображает дисплей первого летательного аппарата, отображающий информацию об эксплуатационных данных первого летательного аппарата и второго летательного аппарата в соответствии с вариантом выполнения данного изобретения.
Фиг.8 изображает блок-схему, иллюстрирующую способ управления полетом летательного аппарата в соответствии с вариантом выполнения данного изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Фиг.1 изображает первый летательный аппарат 10, содержащий различные компоненты или целевую нагрузку, такую как первый блок 11 обработки данных, первый блок 12 связи, радиолокатор 13 и дисплей 14. Первый блок 12 связи может представлять собой двустороннюю систему связи, выполненную с возможностью как отправки, так и приема данных и/или информации. Указанные компоненты могут быть встроены или установлены внутри первого летательного аппарата 10. Первый блок 11 обработки данных может содержать первый вычислительный элемент, выполненный с возможностью обработки данных, полученных от другого летательного аппарата или с земли, например, от диспетчерской службы воздушного движения (ДСВД). Первый летательный аппарат может быть пилотируемым или беспилотным летательным аппаратом. Предпочтительно, первый летательный аппарат является пилотируемым летательным аппаратом, таким как, например, транспортный самолет, военный самолет или вертолет. Однако первый летательный аппарат представлять собой летательный аппарат с неподвижным крылом или
вращающимся крылом, например, винтокрылый летательный аппарат. Радиолокатор 13 первого летательного аппарата 10 может быть частью первого блока 12 связи. Радиолокатор 13 содержит антенну с электронным управлением луча, которая обеспечивает возможность гибкого регулирования зоны охвата радиолокатора 13. Соответственно, радиолокатор 13 может быть расположен с возможностью охвата зоны вокруг хвостовой части первого летательного аппарата 10. Например, радиолокатор 13 может быть повернут в вертикальном и/или горизонтальном направлении вплоть до 50º. Радиолокатор 13 может работать в пассивном режиме, при котором может быть распознан и/или отслежен сигнал, отправленный другим летательным аппаратом. Радиолокатор 13 также может работать в активном режиме, при котором может быть определена дальность между первым летательным аппаратом 10 и другим летательным аппаратом. Таким образом, может быть определено положение другого летательного аппарата относительно положения первого летательного аппарата 10, например, во время выполнения полета. Первый блок 12 связи, например, радиолокатор 13, может быть выполнен с возможностью определения дальности
между первым летательным аппаратом 10 и другим летательным аппаратом на относительно небольших расстояниях, таких как, например расстояние от 500 до 2000 м.
Фиг.2 изображает второй летательный аппарат 20, содержащий второй блок 21 обработки данных и второй блок 22 связи. Второй блок 22 связи может представлять собой двустороннюю систему связи, выполненную с возможностью как отправки, так и приема данных и/или информации. Указанные компоненты могут быть встроены или установлены внутри второго летательного аппарата 20. Второй блок 22 связи может быть выполнен с возможностью обмена информацией и/или данными с первым блоком 12 связи первого летательного аппарата 10. Второй блок 22 связи может отправлять сигнал маяка первому
летательному аппарату 10, например, пилотируемому летательному аппарату. Указанный сигнал маяка может быть принят радиолокатором 13, так что первый блок 11 обработки данных может определить угловое положение второго летательного аппарата 20 посредством отправленного сигнала маяка. Сигнал маяка может быть достаточно сильным, чтобы обеспечить точное моноимпульсное отслеживание второго летательного аппарата 20 с помощью небольшой антенны радиолокатора 13 летательного аппарата. Моноимпульсное
отслеживание означает, что угловые параметры направления на цель или положение второго летательного аппарата 20 относительно первого летательного аппарата 10, которые меняются во время выполнения полета, могут быть определены с помощью одноимпульсного сигнала маяка. Соответственно, радиолокатор 13 может представлять собой моноимпульсный радиолокатор. Однако также возможно осуществление отправки данных из второго блока 22 связи в первый блок 12 связи, например радиолокатору 13, с помощью сигнала маяка. С помощью сигнала маяка и отраженного сигнала может быть вычислено и/или определено текущее положение второго летательного аппарата 20. Другие
данные, отправленные с помощью сигнала маяка, могут содержать данные о текущем техническом состоянии, например, указывающие на наличие дефектов и неисправностей системы второго летательного аппарата 20. Второй блок 22 связи также может принимать информацию и/или данные из первого блока 12 связи первого летательного аппарата 10. В таком случае второй летательный аппарат 20 может направить или может быть направлен к заданным точкам маршрута на основе принятой информации и/или данных. Положение точек маршрута может быть определено первым блоком 11 обработки данных первого летательного аппарата 10. После отправки информации о расположении точек маршрута из первого блока 12 связи во второй блок 22 связи положения точек маршрута могут быть проанализированы и обработаны вторым блоком 21 обработки данных, что обеспечивает возможность направления полета и проведения второго летательного аппарата 20 через
заданные точки маршрута. Поскольку с помощью определенных точек маршрута можно описать положения в воздушном пространстве, через которые пролетает первый летательный аппарат 10, а позднее и второй летательный аппарат 20, процесс направления полета второго летательного аппарата 20 к точкам маршрута, заданным первым летательным аппаратом 10, может быть представлен как процесс сопровождения. Второй вычислительный элемент, который может представлять собой часть второго блока 21 обработки данных, выполнен с возможностью определения или вычисления положений указанных точек. Следовательно, положения точек маршрута могут быть определены первым блоком 11 обработки данных, например, первым вычислительным элементом, когда первый летательный аппарат пролетает через указанную точку маршрута. Поскольку первый летательный аппарат 10 перемещается во время полета, первый блок 11 обработки данных может последовательно определять положение нескольких точек маршрута, которые вместе составляют траекторию первого летательного аппарата 10. Другими словами, определение точек маршрута происходит последовательно. Под определением точек маршрута понимается вычисление положений указанных точек. Указанные положения определены тремя пространственными координатами и значением времени,
таким образом, для точного определения одной точки маршрута необходимо 4 координаты. Значение времени может определять момент времени, в который первый летательный аппарат 10 проходит определенную точку маршрута, при этом первый блок 11 обработки данных определяет положение этой точки маршрута. Второй вычислительный элемент может отправлять команды системе оптимизации режимов полёта и системе управления полетом второго летательного аппарата 20, так что второй летательный аппарат 20 может быть автоматически направлен к определенным точкам маршрута. Соответственно, указанные команды могут содержать информацию о положениях определенных точек маршрута. Второй летательный аппарат 20 может представлять собой беспилотную авиационную систему и/или дистанционно пилотируемую авиационную систему.
Прежде, чем будет обеспечена возможность обмена информацией для первого блока 12 связи и второго блока 22 связи, первый летательный аппарат 10 может получить разрешение либо от второго летательного аппарата 20, либо от диспетчерской службы воздушного сообщения, находящейся на земле. Например, пилот первого летательного аппарата 10 вводит регистрационный номер второго летательного аппарата 20 для обеспечения связи между первым блоком 12 связи и вторым блоком 22 связи. После ввода регистрационного номера второго летательного аппарата 20 с помощью средства взаимодействия в первый блок 11 обработки данных может быть вычислен шифровальный код, необходимый для установления связи между обоими блоками связи 12, 22 и, соответственно, обоими летательными аппаратами 10, 20. Шифровальный код может представлять собой код системы безопасности, при этом для генерации и/или передачи указанного кода может быть установлен специальный алгоритм. Введение регистрационного номера может также обеспечивать доступ или открывать информацию о диапазоне эксплуатационных режимов полета второго летательного аппарата 20, благодаря чему летные характеристики первого летательного аппарата 10 могут быть приведены в соответствие с летными характеристиками второго летательного аппарата 20.
Фиг.3 изображает первый летательный аппарат 10, направляющий полет второго летательного аппарата 20 по определенным точкам 40 маршрута. Как видно на фиг.3, точки 40 маршрута образуют курс полета или траекторию 41 первого летательного аппарата 10. Соответственно, второй летательный аппарат 20 может отслеживать точки 40 маршрута и следовать траектории 41 полета первого летательного аппарата 10. Первый летательный аппарат 10 может отправлять информацию о положениях определенных точек 40 маршрута с помощью первого сигнала 43 связи второму летательному аппарату 20. Соответственно, второй летательный аппарат 20 может отправлять информацию о своем положении с помощью второго сигнала 42 связи первому летательному аппарату 10 для повышения точности выполнения вычислений местонахождения. Следует отметить, что информация, отправленная с помощью сигналов 42, 43 связи, также может содержать другую информацию помимо положения точек 40 маршрута и положения второго летательного аппарата 20.
Фиг.4 иллюстрирует первый этап осуществления процесса сопровождения.
На первом этапе может быть распознана круговая траектория первого летательного аппарата 10 и второго летательного аппарата 20. Например, второй летательный аппарат 20, например, беспилотная авиационная система, патрулирует в определенном местоположении на известной высоте полета. Траектория 50 патрулирования может иметь круговую форму с определенным радиусом. Местоположение, высоту полета и радиус траектории второго летательного аппарата 20 обеспечивает и/или регулирует дистанционно
действующий на земле пилот или диспетчерская служба воздушного движения. Первый летательный аппарат 10, например, пилотируемый летательный аппарат или летательный аппарат с ручным управлением, начинает движение по другой траектории 51 патрулирования на определенной высоте полета и на определенном расстоянии от второго летательного аппарата 20. Высота полета и расстояние могут быть выбраны, чтобы избежать возможности столкновения первого и второго летательных аппаратов 10, 20, например, путем предварительного определения и сохранения минимального расстояния. Максимальное расстояние между первым летательным аппаратом 10 и вторым летательным аппаратом 20 также может быть заранее определено для обеспечения корректной передачи сигнала и информации между первым блоком 12 связи и вторым блоком 22 связи. Первый летательный аппарат 10 может передавать информацию о начале процесса сопровождения второму летательному аппарату 20 с помощью первого сигнала 43 связи. Другими словами, второй блок 21 обработки данных, например, второй вычислительный элемент находится в ожидании получения данных об определенных точках 40 маршрута для обеспечения возможности направления второго летательного аппарата 20 к точкам 40 маршрута для того, чтобы второй летательный аппарат следовал траектории 41 полета первого летательного аппарата 10.
Фиг.5 иллюстрирует второй этап осуществления процесса сопровождения. На втором этапе первый летательный аппарат 10 принимает второй сигнал 42 связи от второго летательного аппарата 20. Радиолокатор 13 содержит антенну с электронным управлением луча, что обеспечивает возможность гибкого регулирования зоны 60 охвата радиолокатора 13. Антенна может быть настроена так, чтобы охватывать зону 60 в направлении хвостовой части первого летательного аппарата 10, причем направление в сторону хвостовой части представляет собой направление, по существу противоположное направлению полета летательного аппарата 10, как показано на фиг.5. Радиолокатор 13 может быть установлен с возможностью поворота для того, чтобы охватить определенную зону, расположенную позади первого летательного аппарата 10 в горизонтальном и вертикальном направлении. В данном случае горизонтальное направление может быть определено как постоянная высота полета. Второй сигнал 42 связи, отправленный из второго блока 22 связи второго летательного аппарата 20, может представлять собой сигнал маяка. Сигнал маяка может быть кодированным сигналом, так что после приема сигнала маяка первым блоком 12 связи, первый блок 11 обработки данных может получить подтверждение того, что отслеживает надлежащий летательный аппарат, например, второй летательный аппарат 20. Другими словами, идентичность второго летательного аппарата 20 может быть подтверждена с помощью кодированного сигнала, отправленного из второго блока 22 связи в первый блок 12 связи. Радиолокатор 13 может содержать встроенное средство моноимпульсного сопровождения, обеспечивающее возможность вычисления углового положения второго летательного аппарата 20 с помощью сигнала маяка. Следовательно, второй летательный аппарат 20 может находиться в пределах зоны 60 обслуживания радиолокатора 13. Затем указанный радиолокатор в активном режиме может вычислить дальность между первым летательным аппаратом 10 и вторым летательным аппаратом 20 с помощью отраженного сигнала, который может быть отражен от второго летательного аппарата.
Фиг.6 иллюстрирует третий этап осуществления процесса сопровождения.
На третьем этапе первый блок 11 обработки данных вычисляет относительное положение второго летательного аппарата 20, например, беспилотной авиационной системы, с помощью принятого сигнала маяка и определения дальности в активном режиме, например, с помощью отраженного сигнала. Затем информация о вычисленном положении, а также об определенной высоте полета второго летательного аппарата 20 отправляется из первого блока 12 связи во второй блок 22 связи для передачи данной информации во второй блок 21 обработки данных, например, во второй вычислительный элемент. Такое решение может быть преимущественным, если второй летательный аппарат 20 не имеет возможности определить свое положение, например, вследствие неисправности навигационной системы. Также обеспечивается возможность синхронизации навигационных параметров второго летательного аппарата 20 с навигационными параметрами первого летательного аппарата 10. Первый летательный аппарат 10 может подстроить свою скорость для того, чтобы синхронизировать этап прохождения круговой траектории 51 патрулирования первого летательного аппарата 10 с этапом прохождения круговой траектории 50 патрулирования второго летательного аппарата 20. Как показано на фиг.6 первой стрелкой 70, первый летательный аппарат 10 уходит с круговой траектории 51 патрулирования, например по касательной. Первый летательный аппарат 10 может передать информацию о его уходе с круговой траектории 51 второму летательному аппарату 20 посредством блоков связи 12,
22. Первый блок 11 обработки данных дополнительно создает информацию об определенных точках 40 маршрута, которые могут быть расположены вдоль траектории 41 первого летательного аппарата 10. Информация о точках маршрута, которая содержит данные по меньшей мере о положении и значении времени для точки 40 маршрута, последовательно поступает из первого блока связи 12 во второй блок 22 связи. В произвольные интервалы времени первый блок 11 обработки данных производит вычисление точки 40 маршрута, которое затем передает второму летательному аппарату 20 для направления его движения. Значение времени для точки 40 маршрута может быть определено как время достижения указанной точки 40 или пересечения указанной точки 40 первым летательным аппаратом при полете. Значение времени для точки 40 маршрута также может быть определено как время достижения или пересечения первым летательным аппаратом указанной точки 40 с учетом определенной временной задержки. Временную задержку вычисляют для установления границ безопасности для того, чтобы избежать столкновения между первым летательным аппаратом 10 и вторым летательным аппаратом 20. Таким образом, второй блок 21 обработки данных может создавать и обновлять план полета, содержащий четыре вида координат, например три пространственные координаты, описывающие определенную точку в воздушном пространстве, и значение времени. План полета, таким образом, может быть представлен в виде четырехмерного плана полета или 4-D плана. Второй блок 21 обработки данных может точно определить летные характеристики, главным образом, направление полета второго летательного аппарата 20, чтобы второй летательный аппарат 20 следовал за первым летательным аппаратом 10 с постоянной временной задержкой. Соответственно, второй блок 21 обработки данных обеспечивает обновленный план полета для системы управления полетом или системы оптимизации режимов полёта второго летательного аппарата 20. Таким образом, второй летательный аппарат 20 также уходит со своей траектории 50 патрулирования, как показано на фиг.6 другой стрелкой 71. Первый летательный аппарат 10 может быть выполнен с возможностью периодической проверки положения второго летательного аппарата 20, например, посредством сигнала маяка, отправленного из второго блока 22 связи, а также сигнала или отраженного сигнала, проходящего от первого летательного аппарата ко второму летательному аппарату, а затем обратно к первому летательному аппарату. Радиолокатор 13 в пассивном режиме принимает сигнал маяка, что обеспечивает возможность определить угловые параметры направления на цель второго летательного аппарата относительно первого летательного аппарата. Измерение дальности осуществляется радиолокатором в активном режиме, например, путем измерения времени прохождения сигнала или отраженного сигнала. Другими словами, первый блок 21 связи отправляет сигнал второму блоку 22 связи, причем сигнал отражается, например, от наружной обшивки второго летательного аппарата 20. После отражения сигнал поступает обратно в виде отраженного сигнала в первый блок 21 связи, например, в радиолокатор.
Промежуток времени между отправкой и приемом сигнала первым блоком 21 связи может обозначить расстояние между первым летательным аппаратом 10 и вторым летательным аппаратом 20. Также, обновленная информация о положении второго летательного аппарата 20 может быть передана второму летательному аппарату 20 посредством блоков связи 12, 22. В случае отсутствия каких-либо повреждений навигационной системы или системы определения местоположения второго летательного аппарата 20 второй летательный аппарат 20 может независимо вычислить его местоположение и затем передать информацию о его местоположении первому летательному аппарату 10 посредством блоков 12, 22 связи. Таким образом, может быть увеличена точность управления положением летательного аппарата. Текущее положение второго летательного аппарата 20 может быть выведено на дисплее 14 первого летательного аппарата 10, благодаря чему пилот первого летательного аппарата 10 может постоянно проверять текущее положение второго летательного аппарата 20 и, следовательно, также точность следования второго летательного аппарата 20 за первым летательным аппаратом 10. Дисплей 14 первого летательного аппарата 10 может быть, например, контрольным экраном пилота. В случае повреждения или отказа, ухудшающих летные характеристики второго летательного аппарата 20, которые могут произойти, например, в результате неисправности двигателя или обледенения систем летательного аппарата, код текущего технического состояния может быть отправлен первому летательному аппарату посредством блоков 12, 22 связи. Код текущего технического состояния может содержать информацию об ограничении летных характеристик второго летательного аппарата 20, обусловленном его повреждением. Эта информация может быть выведена на контрольный экран пилота первого летательного аппарата 10, благодаря чему пилот может привести летные характеристики первого летательного аппарата в соответствие с ограниченными летными характеристиками второго летательного аппарата и, следовательно, в соответствие с текущим диапазоном эксплуатационных режимов полета второго летательного аппарата 20.
Фиг.7 изображает дисплей 14 первого летательного аппарата 10, на который выводится информация об эксплуатационных данных первого летательного аппарата 10 и второго летательного аппарата 20. Дисплей 14 может быть разделен на несколько частей, на каждой из которых отображается определенная информация о первом летательном аппарате 10 и/или втором летательном аппарате 20. Например, на первой части 80 дисплея 14 отображается диапазон эксплуатационных режимов, отражающий текущие доступные характеристики второго летательного аппарата 20, например, высоту полета и скорость. Во второй части 81 дисплея 14 может отображаться источник неисправности второго летательного аппарата 20. В третьей части 83 дисплея 14 может быть отображена информация о точности следования или сопровождения, т.е. может быть отображено направление полета второго летательного аппарата 20 к точкам 40 маршрута и, соответственно, точность следования за первым летательным аппаратом 10. В четвертой части 82 дисплея 14 может быть отображена дальность между первым летательным аппаратом 10 и вторым летательным аппаратом 20, которая показывает вероятность столкновения. Следует отметить, что система для управления полетом второго летательного аппарата 20 может быть применена не только при полете второго летательного аппарата 20. Например, она также может быть применена, когда второй летательный аппарат 20 находится на взлётно-посадочной полосе. В этом случае первый летательный аппарат, например, пилотируемый летательный аппарат, взлетает и мгновенно отправляет свою 4-D траекторию полета второму летательному аппарату 20, так что второй летательный аппарат 20 может следовать указанной траектории полета. Другими словами, первый летательный аппарат 10 определяет несколько точек 40 маршрута, которые вместе образуют траекторию полета, которой должен следовать второй летательный аппарат 20.
Когда второй летательный аппарат 20 следует за первым летательным аппаратом во время процесса сопровождения, временную задержку между полетами первого летательного аппарата 10 и второго летательного аппарата 20 можно постоянно регулировать, что означает, что текущая скорость второго летательного аппарата 20 может быть приведена в соответствие с текущей скоростью первого летательного аппарата 10. Однако текущая скорость первого летательного аппарата 10 может быть приведена в соответствие с текущей скоростью второго летательного аппарата 20 и, соответственно, с текущими техническими возможностями второго летательного аппарата 20. Из соображений безопасности подстраивание скорости также может быть осуществлено во время этапов взлета и набора высоты для обоих летательных аппаратов 10, 20. Информация о скорости может быть задана первым летательным аппаратом 10, так как каждое положение точки маршрута соответствует другому значению времени, причем значение времени определяет тот момент времени, в который первый летательный аппарат 10 пролетает через соответствующую точку 40 маршрута.
Фиг.8 изображает блок-схему способа управления полетом летательного аппарата. Данный способ может включать несколько этапов. На этапе S1 указанного способа первый летательный аппарат 10 задает координаты положения точки 40 маршрута. При этом могут быть определены три пространственные координаты и по меньшей мере одно значение времени. На другом этапе S2 первый блок 12 связи первого летательного аппарата 10 передает координаты положения точки 40 маршрута во второй блок 22 связи второго летательного аппарата 20. На следующем этапе S3 указанного способа второй летательный аппарат 20 направляют к местоположению точки 40 маршрута. Следует отметить, что данный способ не ограничивается описанными этапами.
Несмотря на то, что данное изобретение проиллюстрировано на чертежах и подробно описано в приведенном выше описании, указанные материалы следует рассматривать в качестве иллюстративных и типовых, а не ограничительных; данное изобретение не ограничивается рассмотренными вариантами выполнения.
Другие варианты выполнения помимо описанных станут понятны и осуществимы для специалистов данной области техники для использования заявленного изобретения при изучении чертежей, описания и прилагаемой формулы изобретения. В формуле изобретения термин «содержащий» не исключает возможности включения других элементов, а упоминание элементов в единственном числе не исключает наличия нескольких этих элементов. Сам факт того, что определенные признаки изложены в отличающихся друг от друга зависимых пунктах формулы изобретения, не означает, что сочетание этих признаков не может быть преимущественным. Любые ссылочные позиции, указанные в формуле изобретения, не следует рассматривать как ограничивающие объем правовой охраны настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ коррекции бесплатформенной инерциальной навигационной системы беспилотного летательного аппарата малой дальности с использованием интеллектуальной системы геопространственной информации | 2019 |
|
RU2722599C1 |
| Способ проведения поисково-спасательных работ | 2018 |
|
RU2698893C1 |
| СПОСОБ УПРАВЛЕНИЯ ДРОНОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2709562C1 |
| АЭРОМОБИЛЬНЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ВЕРТОЛЕТНОГО ТИПА | 2022 |
|
RU2792314C1 |
| Информационно-измерительная и управляющая система посадки группы беспилотных летательных аппаратов на посадочную платформу | 2022 |
|
RU2784221C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУППОЙ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2834270C1 |
| Беспилотный летательный аппарат самолетного типа для обнаружения пропавшего человека | 2019 |
|
RU2723201C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2024 |
|
RU2822088C1 |
| Беспилотный авиационный робототехнический комплекс для внесения пестицидов | 2022 |
|
RU2779780C1 |
| Трехкоординатный гомодинный радиолокатор | 2024 |
|
RU2838247C1 |
Группа изобретений относится к двум системам и способу сопровождения для летательных аппаратов. Каждая из систем содержит два блока связи, один из которых установлен на первом летательном аппарате, а второй блок связи на втором летательном аппарате. Для сопровождения летательных аппаратов определяют координаты положения точки маршрута первого летательного аппарата и передают их с помощью первого блока связи первого летательного аппарата во второй блок связи второго летательного аппарата для направления его полета по этим координатам. Обеспечивается управление полетом самолета в целях сопровождения другого самолета. 3 н. и 24 з.п. ф-лы, 8 ил.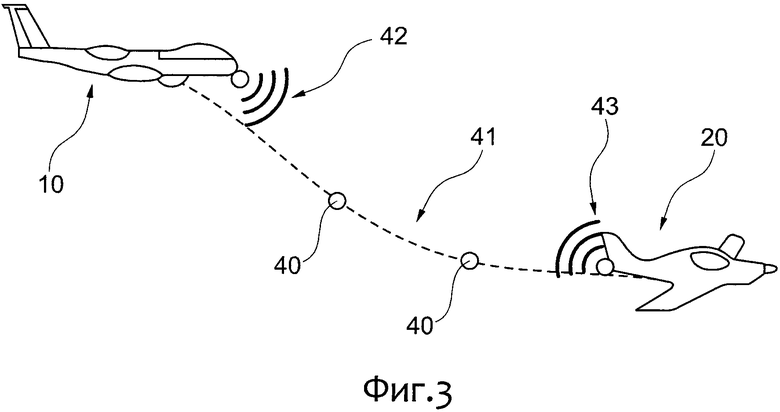
1. Система сопровождения для летательных аппаратов, содержащая первый блок (12) связи, выполненный с возможностью установки на первом летательном аппарате (10) и с возможностью передачи определенных на первом летательном аппарате (10) координат положения первой точки (40) маршрута во второй блок (22) связи, выполненный с возможностью его установки на втором летательном аппарате (20) для направления полета второго летательного аппарата (20) к указанному положению точки (40) маршрута.
2. Система по п.1, в которой первый летательный аппарат (10) является пилотируемым летательным аппаратом.
3. Система по п.1, в которой второй летательный аппарат (20) является беспилотным летательным аппаратом.
4. Система по п.1, в которой первый летательный аппарат (10) выполнен с возможностью определения координат положений нескольких точек (40) маршрута, определяемых в системе отсчета, причем указанные нескольких точек (40) маршрута вместе образуют траекторию (41) полета первого летательного аппарата (10).
5. Система по п.4, в которой первый летательный аппарат (10) выполнен с возможностью определения значения времени для каждой из указанных нескольких точек (40) маршрута.
6. Система по п.4, в которой второй летательный аппарат (20) выполнен с возможностью следования по траектории (41) полета первого летательного аппарата (10) во время выполнения полета первого летательного аппарата (10) и второго летательного аппарата (20).
7. Система по п.1, в которой первый летательный аппарат дополнительно содержит первый блок (11) обработки данных, который выполнен с возможностью определения положения второго летательного аппарата (20) на основе сигнала (42), отправленного из второго блока (22) связи в первый блок (12) связи.
8. Система по п.7, в которой первый блок (11) обработки данных выполнен с возможностью определения эксплуатационных данных второго летательного аппарата (20), выбранных из группы, включающей коэффициент загрузки, скорость и высоту полета.
9. Система по п.8, в которой первый летательный аппарат дополнительно содержит дисплей (14), который выполнен с возможностью отображения по меньшей мере эксплуатационных данных второго летательного аппарата (20).
10. Система по п.7, в которой положение второго летательного аппарата (20) определяется в земной системе координат.
11. Система по п.7, в которой сигнал (42), отправленный из второго блока (22) связи в первый блок (12) связи, является сигналом маяка, который содержит информацию об опознавательных характеристиках второго летательного аппарата (20).
12. Система по п.1, в которой первый блок (12) связи содержит радиолокатор (13), выполненный с возможностью приема сигнала маяка, отправленного из второго блока (22) связи в пассивном режиме с обеспечением возможности определения углового положения второго летательного аппарата (20) относительно первого летательного аппарата (10).
13. Система по одному из предыдущих пунктов, в которой первый блок (12) связи содержит радиолокатор (13), выполненный с возможностью приема отраженного сигнала (42) от второго летательного аппарата (22) в активном режиме с обеспечением возможности определения дальности между первым летательным аппаратом (10) и вторым летательным аппаратом (20).
14. Система сопровождения для летательных аппаратов, содержащая первый блок (12) связи, выполненный с возможностью установки на первом летательном аппарате (10) и с возможностью передачи опознавательного сигнала второму летательному аппарату (20), после приема которого на втором летательном аппарате (20) осуществляется сопровождение первого летательного аппарата (10).
15. Система по п.14, в которой первый летательный аппарат (10) является пилотируемым летательным аппаратом.
16. Система по п.14, в которой второй летательный аппарат (20) является беспилотным летательным аппаратом.
17. Система по п.14, в которой первый летательный аппарат (10) выполнен с возможностью определения координат положений нескольких точек (40) маршрута, определяемых в системе отсчета, причем указанные нескольких точек (40) маршрута вместе образуют траекторию (41) полета первого летательного аппарата (10).
18. Система по п.17, в которой первый летательный аппарат (10) выполнен с возможностью определения значения времени для каждой из указанных нескольких точек (40) маршрута.
19. Система по п.17, в которой второй летательный аппарат (20) выполнен с возможностью следования по траектории (41) полета первого летательного аппарата (10) во время выполнения полета первого летательного аппарата (10) и второго летательного аппарата (20).
20. Система по п.14, в которой первый летательный аппарат дополнительно содержит первый блок (11) обработки данных, который выполнен с возможностью определения положения второго летательного аппарата (20) на основе сигнала (42), отправленного из второго блока (22) связи в первый блок (12) связи.
21. Система по п.20, в которой первый блок (11) обработки данных выполнен с возможностью определения эксплуатационных данных второго летательного аппарата (20), выбранных из группы, включающей коэффициент загрузки, скорость и высоту полета.
22. Система по п.21, в которой первый летательный аппарат дополнительно содержит дисплей (14), который выполнен с возможностью отображения по меньшей мере эксплуатационных данных второго летательного аппарата (20).
23. Система по п.20, в которой положение второго летательного аппарата (20) определяется в земной системе координат.
24. Система по п.20, в которой сигнал (42), отправленный из второго блока (22) связи в первый блок (12) связи, является сигналом маяка, который содержит информацию об опознавательных характеристиках второго летательного аппарата (20).
25. Система по п.14, в которой первый блок (12) связи содержит радиолокатор (13), выполненный с возможностью приема сигнала маяка, отправленного из второго блока (22) связи в пассивном режиме с обеспечением возможности определения углового положения второго летательного аппарата (20) относительно первого летательного аппарата (10).
26. Система по одному из пп.14-25, в которой первый блок (12) связи содержит радиолокатор (13), выполненный с возможностью приема отраженного сигнала (42) от второго летательного аппарата (22) в активном режиме с обеспечением возможности определения дальности между первым летательным аппаратом (10) и вторым летательным аппаратом (20).
27. Способ сопровождения для летательных аппаратов, включающий определение (S1) координат положения точки (40) маршрута первого летательного аппарата (10), передачу (S2) координат указанного положения точки (40) маршрута из первого блока (12) связи первого летательного аппарата (10) во второй блок (22) связи второго летательного аппарата (20) и направление (S3) полета второго летательного аппарата (20) к указанному положению точки (40) маршрута.
| СПОСОБ КОНТРОЛЯ ДИСТАНЦИЙ МЕЖДУ ВЕДУЩИМ И ВЕДОМЫМ САМОЛЕТАМИ ПРИ ПОЛЕТЕ ПО МАРШРУТУ С ЭШЕЛОНИРОВАНИЕМ ПО ВЫСОТЕ | 2012 |
|
RU2510082C2 |
| СПОСОБ СОПРОВОЖДЕНИЯ ПИЛОТИРУЕМОЙ ВОЗДУШНОЙ ЦЕЛИ | 2009 |
|
RU2408031C2 |
| US 6926233 B1, 09.08.2005 | |||
| US 7272472 B1, 18.09.2007 | |||
| US 8112187 B2, 07.02.2012. | |||

