Изобретение относится к области систем управления летательными аппаратами и может быть использовано при решении задачи обеспечения контроля дистанции между ведущим и ведомым самолетами при полете по маршруту как в аварийных ситуациях, связанных с отказом штатных бортовых средств измерения дистанций (бортовых радиолокационных станций), так и в условиях, когда по соображениям скрытности бортовые радиолокационные станции (БРЛС) не могут быть включены на излучение. Выдерживание заданных дистанций между самолетами при полетах в составе группы днем в сложных метеорологических условиях и ночью является важнейшим условием обеспечения безопасности полетов по маршруту. С этой целью между самолетами должны устанавливаться, контролироваться и поддерживаться дистанции не меньше безопасных. Эффективность любых способов контроля дистанций между самолетами зависит от вида используемых средств измерения фактических дистанций между самолетами и их работоспособности. Работоспособность средств измерения может быть нарушена в результате отказов технических средств и их элементов. Поэтому задача обеспечения контроля дистанций между самолетами при аварийных ситуациях, связанных с отказом штатных бортовых средств измерения дистанции между самолетами является важнейшей задачей обеспечения безопасности полетов самолетов в любых видах авиации. При этом задачи контроля дистанций между самолетами при полете по маршруту в случае отказов бортовых средств измерения дистанции следует решать, в первую очередь, за счет использования другого штатного оборудования, способного заменить вышедшие из строя средства и обеспечить контроль дистанций между самолетами. В военно-воздушных силах в качестве такого оборудования может использоваться станция предупреждения о радиолокационном облучении (СПО) самолета, устанавливая на все типы самолетов [Станция предупреждения о радиолокационном облучении, Интернет сайт ЦКБА /main.php? id=23]
Известен способ контроля дистанции между самолетами при полете по маршруту, заключающийся в периодическом уточнений фактической дистанции между самолетами путем определения момента пролета заранее заданного рубежа (контрольного ориентира) всеми самолетами группы, при этом замер дистанции ведомыми самолетами, как правило, производится относительно ведущего самолета по его командам [Справочник летчика и штурмана. Под ред. засл. воен. штурмана СССР генерал-лейтенанта авиации М.В. Лавского. - М.: Воениздат, 1974 г, с.389].
Недостатком этого способа контроля дистанции между самолетами является то, что в сложных метеорологических условиях и при выходе из строя (отказе) бортовых средств наблюдения контрольных ориентиров (радиолокационных станций (РЛС), оптико-электронных визиров и т.д.) он не может быть реализован.
Наиболее близким по сущности и достигаемому эффекту является способ контроля дистанций между ведущим и ведомым самолетами при полете по маршруту с эшелонированием по высоте, заключающийся в периодическом определении линейной дистанции между самолетами [Справочник летчика и штурмана, под ред. засл. воен. штурмана СССР генерал-лейтенанта авиации М.В. Лавского. - М.: Воениздат, 1974 г, с.389] с использованием бортового оборудования самолетов. В качестве такого оборудования, как правило, используются БРЛС или лазерные дальномеры, позволяющие непосредственно измерять линейные дистанции между самолетами. Это способ принят в дальнейшем за прототип.
Основным недостатком этого способа является то, что его невозможно выполнить при отказах БРЛС самолета. Кроме того, данный способ контроля дистанций между самолетами при использовании БРЛС может демаскировать боевые порядки самолетов из-за высокой мощности излучаемых сигналов этих БРЛС.
Технической задачей настоящего изобретения является обеспечение возможности выполнения контроля дистанций между ведущим и ведомым самолетами при полете по маршруту с эшелонированием по высоте при отказах БРЛС ведомого самолета или при невозможности применения РЛС для измерения дистанции до ведущего самолета.
Поставленная задача решается за счет того, что в известном способе контроля дистанций между ведущим и ведомым самолетами при полете по маршруту с эшелонированием по высоте, заключающемся в периодическом определении линейной дистанции между самолетами с использованием бортового оборудования самолетов, новым является то, что для периодического определения линейной дистанций между самолетами измеряют угловые направления на ведущий самолет и определяют дистанцию и интервал между самолетами в горизонтальной плоскости с помощью штатной станции предупреждения о радиолокационном облучении (СПО) ведомого самолета, имеющей азимутальный и угломестный каналы пеленгования, и маломощных бортовых источников радиоизлучения (БИРИ), размещенных на ведущем и ведомым самолетах и работающих в частотном диапазоне СПО на разнесенных частотах, значения которых заранее заносят в банк данных СПО, причем на борту ведомого самолета с помощью СПО идентифицируют ведущий самолет по значению частоты БИРИ, измеренной СПО, определяют угловое направление в секторах обзора СПО по азимуту 0±60 град, и по углу места 0±30 град на БИРИ, размещенный на ведущем самолете, и вычисляют дистанцию (Д) и интервал (И) до ведущего самолета в горизонтальной плоскости с использованием, определенных по индикатору СПО, угловых положений его БИРИ в горизонтальной (αг) и вертикальной (αв) плоскостях по формулам
ΔН - разность высот полета ведущего и ведомого самолетов, при этом ΔН определяют путем вычитания из значения высоты, индицируемой на высотомере самолета, летящего на большей высоте, значения высоты самолета, индицируемой на высотомере самолета, летящего на меньшей высоте, причем значения высоты полета ведущего самолета, необходимые для вычисления величины ΔН, передают на ведомый самолет по его запросу.
Таким образом, предлагаемый способ контроля дистанции обеспечивает возможность определения дистанции и интервала между ведущим и ведомым самолетами при отказах БРЛС ведомого самолета или при невозможности применения БРЛС для измерения дистанции до ведущего самолета.
Решение обладает новым свойством - возможностью обеспечения контроля дистанции и интервала между самолетами при отказах их бортовых РЛС или невозможности их применения за счет использования для определения дистанции штатной СПО и двух непрерывно работающих на разнесенных частотах, перекрываемых частотным диапазоном СПО, бортовых источников радиоизлучения, размещаемых на самолетах и специального алгоритма определения дистанции и интервала до ведущего самолета, реализуемого в бортовом вычислителе.
При этом использование БИРИ, размещаемых на ведущем и ведомом самолетах, позволяет выполнять контроль дистанций между самолетами с борта как ведомого, так и ведущего самолетов, причем в последнем случае угловые координаты ведомого самолета определяют с помощью СПО ведущего самолета по сигналам БИРИ ведомого самолета, принимаемым из задней полусферы ведущего самолета и индицируемым в хвостовом секторе его СПО..
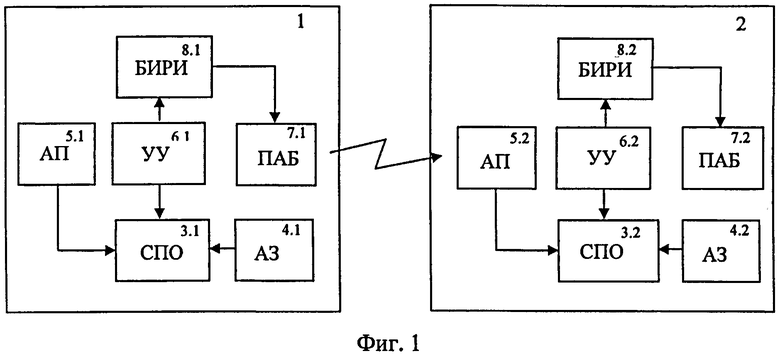
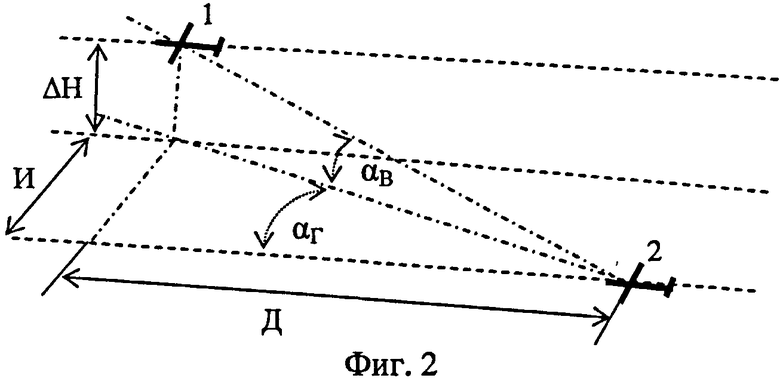
На фиг.1 представлена структурная схема системы для реализации предлагаемого способа. На фиг.2 приведена схема, показывающая пространственное положение самолетов, параметры, характеризующие взаимное положение самолетов и угловые параметры, определяемые СПО ведомого самолета.
Схема системы для реализации предлагаемого способа состоит из ведущего самолета 1, ведомого самолета 2 и размещенных на этих самолетах 1, 2: станции предупреждения о радиолокационном облучении (СПО) - 3.1, 3.2 ведущего и ведомого самолетов, соответственно, антенны СПО задней полусферы (AЗ) ведущего и ведомого самолетов, соответственно - 4.1, 4.2, антенны СПО передней полусферы (АП)) ведущего и ведомого самолетов, соответственно - 5.1, 5.2, устройства управления (УУ) ведущего и ведомого самолетов, соответственно - 6.1, 6.2, передающие антенны (ПАБ) бортового источника радиоизлучения (БИРИ)) ведущего и ведомого самолетов, соответственно - 7.1, 7.2, БИРИ ведущего и ведомого самолетов, соответственно - 8.1, 8.2. Проведенный анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации, и выявление источников, содержащих сведения об аналогах заявленных изобретений, позволил установить, что заявитель не обнаружил аналогов, характеризующийся признаками, тождественными всем существенным признакам предлагаемого способа контроля дистанций между ведомым и ведущим самолетами. Выбор из перечня выявленных аналогов прототипов, как наиболее близких по совокупности существенных признаков аналога, позволил выявить совокупность существенных по отношению к сформулированному техническому результату признаков в заявленном способе, которые изложены в формуле изобретения. Поэтому заявленное изобретение соответствует критерию «новизна».
Для проверки соответствия заявленного изобретения критерию «изобретательский уровень» проведен поиск и анализ известных технических решений с целью выявления признаков, совпадающих с признаками предлагаемого способа контроля дистанций между ведомым и ведущим самолетами. Результаты поиска показали, что заявленное изобретение не вытекает явным образом из известного уровня техники, определенного заявителем. Заявленным изобретением не предусматриваются следующие преобразования:
дополнение известного средства каким-либо известным блоком, присоединяемым к нему по известным правилам, для достижения технического результата;
замена какой-либо части известного средства другой известной частью для достижения технического результата;
увеличение однотипных элементов для достижения сформулированного технического результата;
создание средства, состоящего из известных частей, выбор которых и связь между ними осуществлен по известным правилам, а достигнутый при этом технический результат обусловлен только известными свойствами частей этого средства и связями между ними.
Следовательно, заявленное изобретение соответствуют критерию «Изобретательский уровень».
Предлагаемое решение соответствует критерию «промышленная применимость», так как совокупность характеризующих его признаков обеспечивает возможность его существования, работоспособность и воспроизводимость, так как для реализации заявляемого решения могут быть использованы известные материалы и оборудование.
Способ контроля дистанций между ведущим и ведомым самолетами при полете по маршруту с эшелонированием по высоте реализуется следующим образом.
Для контроля дистанций между ведущим и ведомым самолетами при отказах БРЛС или невозможности ее применения используются СПО 3.1, 3.2 и два БИРИ 8.1, 8.2, работающих на разнесенных частотах, перекрываемых частотным диапазоном СПО, и размещаемых на ведущем 1 и ведомом 2 самолетах. Причем частоты БИРИ 8.1, 8.2 заранее заносятся в банк данных СПО 3.1, 3.2 и их разнос должен составлять 500-1000 МГц (например частота БИРИ 8.1, размещаемого на ведущем самолете 1, может быть 8 ГГц, а БИРИ 8.2, размещаемого на ведомом самолете 2-9 ГГц).
При этом использование БИРИ 8.1 и 8.2, размещаемых на ведущем 1 и ведомом 2 самолетах соответственно, позволяет выполнять контроль дистанций до самолета с борта как ведомого 2, так и ведущего 1 самолета, причем в последнем случае угловые координаты ведомого самолета 2 определяются с помощью СПО 3.1 ведущего самолета 1 по сигналам БИРИ 8.2 ведомого самолета 2, принимаемым из задней полусферы ведущего самолета 1 антенной СПО задней полусферы AЗ 4.1 и индицируемым в хвостовом секторе его СПО 3.1. Для конкретности ниже рассматривается только контроль дистанции с борта ведомого самолета 2. В этом случае с помощью УУ 6.1 на ведущем самолете 1 производят включение БИРИ 8.1 на излучение сигналов, а на ведомом самолете 2 по командам с УУ 6.2 выключается питание БИРИ 8.2 и в качестве приоритетной цели для СПО 3.2 задается БИРИ 8.1, параметры которого уже ранее внесены в банк данных СПО 3.2.
На борту ведомого самолета 2 при полете по маршруту с эшелонированием по высоте антенна СПО передней полусферы АП 5.2 принимает сигналы передатчика БИРИ 8.1, излучаемые ПАБ 7.1 и передает их в пеленгационную аппаратуру СПО 3.2 с помощью которой определяются угловые направления в вертикальной и горизонтальной плоскости на БИРИ 8.1, размещенный на ведущем самолете 1, в секторах обзора СПО 3.2 по азимуту 0±60 град, и по углу места 0±30 град., а по значениям измеренной частоты идентифицируется (распознается) ведущий самолет 1… Направления на БИРИ 8.1 отображаются на соответствующих секторах индикатора СПО 3.2 и соответствуют угловому положению БИРИ 8.1 в секторе 60 град, в передней и задней полусфере с точностью 2 град (СКО пеленгования) [Станция предупреждения о радиолокационном облучении, Интернет сайт ЦКБА /main, php? id=23]. С использованием, определенных по индикатору СПО 3.2, угловых положений БИРИ 8.1 ведущего самолета 1 в горизонтальной (αг) и вертикальной (αв) плоскостях и разности высот ДН полета ведущего и ведомого самолетов вычисляют дистанцию (Д) и интервал (И) до ведущего самолета 1 по формулам

при этом разность высот ΔН полета самолетов определяют путем вычитания из значения высоты, индицируемой на высотомере самолета, летящего на большей высоте, значения высоты самолета, индицируемой на высотомере самолета, летящего на меньшей высоте, причем значения высоты полета ведущего самолета 1, необходимые для вычислении величины ΔН, передаются на ведомый самолет 2 по его запросу.
Таким образом, заявленный способ контроля дистанций между ведомым и ведущим самолетами обеспечивает решение задачи определения дистанции и интервала между самолетами при отказах их бортовых РЛС или невозможности применения РЛС за счет использования для определения дистанций штатной СПО и двух непрерывно работающих на разнесенных частотах, перекрываемых частотным диапазоном СПО, бортовых источников радиоизлучения, размещаемых на самолетах, и специального алгоритма определения дистанции и интервала до ведущего самолета, который может быть реализован в бортовом вычислителе.
Проведем количественный анализ точностных характеристик предложенного способа контроля дистанций между ведущим и ведомым самолетами при полете по маршруту с эшелонированием по высоте. Учитывая известные ограничения угломестного метода определения дальности до радиоизлучающего объекта, в частности относительно небольшую дальность, в пределах которой может быть обеспечена удовлетворительная точность местоопределения с учетом реально достижимой погрешности измерения угловых координат, оценим погрешности (среднюю квадратическую ошибку (СКО)) определения дистанции до ведущего самолета с помощью СПО ведомого самолета для типовых значений характеристик СПО [Станция предупреждения о радиолокационном облучении, Интернет сайт ЦКБА /main, php? id=23]] и дистанций между самолетами [Справочник летчика и штурмана, под ред. засл. воен. штурмана СССР генерал-лейтенанта авиации М.В.. Лавского. - М.: Воениздат, 1974 г, с.389]. СКО определения дистанции до ведущего самолета угломестным способом может быть вычислена по формуле [Мельников Ю.П., Попов С.В. Радиотехническая разведка. Методы оценки эффективности местоопределения источников излучения. - М.: «Радиотехника», 2008. - 271 с: ил]

где σу, Dн, ΔН - СКО определения угловых координат ведущего самолета с помощью СПО ведомого самолета, наклонная дальность до ведущего самолета и разность высот полета самолетов, соответственно.
Расчеты по формуле (1) показывают, что для типовых параметров боевых порядков самолетов (дистанции между самолетами (300…500) м, эшелонирование по высоте (200…300) м. и при СКО пеленгования СПО ведомого самолета излучения БИРИ ведущего самолета в горизонтальной и вертикальной плоскости, равной 2 град., значения СКО определения дистанции до ведущего самолета составят (15.3-10.2) м. на дальности 300 м от ведущего самолета и (42.5-28.3) м. на дальности 500 м. При этом относительная ошибка определения дальности не будет превышать (5-8.5)% от фактической дальности до ведущего самолета, что позволит, в условиях отказа БРЛС, поддерживать безопасные дистанции и интервалы до ведущего самолета с использованием результатов их контроля по данным от СПО ведомого самолета.
Анализ полученных результатов показывает, что предлагаемый способ контроля дистанций между ведущим и ведомым самолетами в аварийных ситуациях (при отказах бортовых РЛС) обеспечивает достаточную для безопасного самолетовождения по маршруту точность определения линейных дистанций между ведущим и ведомым самолетами и может рассматриваться как резервный способ контроля дистанции для многих типов самолетов ВВС.
Изложенные сведения свидетельствуют о возможности выполнения при реализации заявленного способа контроля дистанции между ведущим и ведомым самолетами следующей совокупности условий:
предлагаемый способ контроля дистанций между ведущим и ведомым самолетами при его реализации позволит обеспечить определение дистанции и интервала между самолетами при отказах их бортовых РЛС или невозможности применения РЛС в целях повышения скрытности боевых порядков самолетов;
показана возможность реализации на практике заявленного способа контроля дистанций между ведущим и ведомым самолетами в том виде, как он охарактеризован в формуле изобретения, с помощью описанных в заявке или известных до даты приоритета средств и методов;
предлагаемый способ контроля дистанций между ведущим и ведомым самолетами, при его разработке способен обеспечить достижение технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗАХОДА САМОЛЕТА НА ПОСАДКУ В АВАРИЙНЫХ УСЛОВИЯХ (ВАРИАНТЫ) | 2012 |
|
RU2509684C2 |
| Способ определения координат летательного аппарата относительно взлётно-посадочной полосы | 2016 |
|
RU2620587C1 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ ЛЕТАТЕЛЬНОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2559196C1 |
| РАДИОТЕХНИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ, ИЗМЕРЕНИЯ СКОРОСТИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1993 |
|
RU2126979C1 |
| СПОСОБ И БОРТОВАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ МИНИМУМОВ ДИСТАНЦИЙ ПРОДОЛЬНОГО ЭШЕЛОНИРОВАНИЯ ПО УСЛОВИЯМ ТУРБУЛЕНТНОСТИ ВИХРЕВОГО СЛЕДА | 2012 |
|
RU2525167C2 |
| СИСТЕМА КОНТРОЛЯ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1994 |
|
RU2092887C1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА, А ИМЕННО ЭКРАНОПЛАНА ИЛИ ЭКРАНОЛЕТА НА ВОДНУЮ ПОВЕРХНОСТЬ | 2019 |
|
RU2722811C1 |
| РАДИОЛОКАЦИОННЫЙ АВТОНОМНЫЙ СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ЛЕТАТЕЛЬНОГО АППАРАТА С ПРЕПЯТСТВИЯМИ В ВЕРТИКАЛЬНОЙ ПЛОСКОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2507539C2 |
| Способ функционирования системы импульсно-доплеровских бортовых радиолокационных станций группы истребителей при обеспечении их электромагнитной совместимости в условиях воздействия помех | 2020 |
|
RU2742815C1 |
| СПОСОБ КОМАНДНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА НАЗЕМНЫЕ ЦЕЛИ | 2009 |
|
RU2408846C1 |
Изобретение относится к области управления летательными аппаратами и предназначено для использования при решении задачи обеспечения контроля дистанций между ведущим и ведомым самолетами как в аварийных ситуациях, связанных с отказом штатных средств измерения дистанций, так и в условиях, когда по соображениям скрытности эти средства не включаются. Для контроля дистанции используют станции предупреждения о радиолокационном облучении (СПО) самолета и бортовые источники радиоизлучения (БИРИ), размещаемые на ведущем и ведомом самолетах. Частоты БИРИ заранее заносятся в банк данных СПО и их разнос должен составлять 500-1000 МГц. При контроле дистанций с борта ведомого самолета на ведущем самолете производят включение БИРИ на излучение сигналов, а на ведомом самолете выключают питание собственного БИРИ и в качестве приоритетной цели для СПО задают БИРИ ведущего самолета, параметры которого уже ранее внесены в банк данных СПО. На борту ведомого самолета принимаются сигналы передатчика БИРИ ведущего самолета и передаются в пеленгационную аппаратуру СПО. Определяют угловые направления в вертикальной и горизонтальной плоскости на БИРИ, размещенном на ведущем самолете, а по значениям измеренной частоты идентифицируют ведущий самолет. С использованием определенных по индикатору СПО угловых положений БИРИ ведущего самолета в горизонтальной и вертикальной плоскостях и разности высот полета ведущего и ведомого самолетов вычисляют дистанцию и интервал до ведущего самолета. Значения высоты полета ведущего самолета, необходимые для вычисления разности высот, передаются на ведомый самолет по его запросу. При контроле дистанций с борта ведущего самолета угловые координаты ведомого самолета определяются с помощью СПО ведущего самолета по сигналам БИРИ ведомого самолета. Предложенный способ обеспечивает достаточную для безопасного самолетовождения по маршруту точность определения линейных дистанций между ведущим и ведомым самолетами. 2 ил.
Способ контроля дистанций между ведущим и ведомым самолетами при полете по маршруту с эшелонированием по высоте, заключающийся в периодическом определении линейной дистанции между самолетами, отличающийся тем, что для периодического определения линейной дистанции между самолетами измеряют угловые направления на ведущий самолет и определяют дистанцию и интервал между самолетами в горизонтальной плоскости с помощью штатной станции предупреждения о радиолокационном облучении (СПО) ведомого самолета, имеющей азимутальный и угломестный каналы пеленгования, и маломощных бортовых источников радиоизлучения (БИРИ), размещенных на ведущем и ведомом самолетах и работающих в частотном диапазоне СПО на разнесенных частотах, значения которых заранее заносят в банк данных СПО, причем на борту ведомого самолета с помощью СПО идентифицируют ведущий самолет по значению частоты БИРИ, измеренной СПО, определяют угловое направление в секторах обзора СПО по азимуту 0±60°, и по углу места 0±30° на БИРИ, размещенный на ведущем самолете, и вычисляют дистанцию (Д) и интервал (И) до ведущего самолета в горизонтальной плоскости с использованием, определенных по индикатору СПО, угловых положений его БИРИ в горизонтальной (αг) и вертикальной (αв) плоскостях по формулам

где ΔН - разность высот полета ведущего и ведомого самолетов,
при этом ΔН определяют путем вычитания из значения высоты, индицируемой на высотомере самолета, летящего на большей высоте, значения высоты самолета, индицируемой на высотомере самолета, летящего на меньшей высоте, причем значения высоты полета ведущего самолета, необходимые для вычисления величины ΔН, передают на ведомый самолет по его запросу.
| Справочник летчика и штурмана /Под ред | |||
| М.В | |||
| Лавского | |||
| - М.: Воениздат, 1974, с.389 | |||
| WO 2008001122 А1, 03.01.2008 | |||
| WO 2008001117 А1, 03.01.2008 | |||
| ЕР 1450331 А1, 25.08.2004 | |||
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ | 1996 |
|
RU2134911C1 |

