Изобретение относится к авиационной технике, а именно к авиационным комплексам с беспилотными летательными аппаратами вертолетного типа.
Известно множество мобильных комплексов с беспилотными летательными аппаратами (БЛА), содержащих средства доставки их к месту применения и управления в процессе эксплуатации.
В подавляющем большинстве своем комплексы с БЛА базируются на наземных транспортных средствах, которые осуществляют их доставку к месту применения и с них же осуществляется управление работой комплекса БЛА.
Известен мобильный комплекс воздушной разведки «ТИПЧАК» с БЛА самолетного типа, базирующийся на четырех транспортных средствах типа «КАМАЗ» (Новости аэрокосмического салона МАКС 2005, №2 от 17.08.2005 г., стр. 20).
Известен беспилотный авиационный комплекс вертикального взлета (патент РФ №2403182, МПК В64С 27/00, приоритет 18.06.2009 г.), базирующийся на наземном транспортном средстве типа платформы, буксируемой тягачом.
В приведенных выше аналогах основными недостатками являются низкая мобильность и малый радиус действия при применении БЛА на малых высотах, что заметно ухудшает возможности комплекса. Низкая мобильность возникает в силу того, что доставка к месту применения комплекса с БЛА осуществляется наземным транспортным средством, а малый радиус действия - из-за осуществления функционирования БЛА по радиоканалу с наземного пункта управления.
Наиболее близким аналогом (прототипом) заявленного технического решения является техническое решение, описывающее аэромобильный комплекс беспилотного вертолета (БВ), содержащееся в патенте РФ №2403181 (МПК В64С 27/00, приоритет 12.05.2009 г.).
Указанный технический результат, описанный в этом изобретении, достигается за счет того, что предлагается техническое решение, содержащее беспилотный вертолет с блоком траекторного управления, пилотируемый вертолет с кабиной экипажа, оснащенной рабочим местом летчика с пультом управления полетом вертолета, автоматизируемым рабочим местом оператора с пультом управления БВ и индикатором слежения БВ, блок приема/передачи данных с пилотируемого вертолета, сопряженного радиоканалом с блоком передачи/приема данных БВ и блоком приема/передачи данных наземного командного пункта управления, а пилотируемый вертолет оснащен вторым автоматизированным рабочим местом оператора с пультом управления блоком оптико-электронной системы или радиолокационной станцией, установленным на БВ, и блоком индикации информационных данных с вышеупомянутого оборудования БВ, при этом оба автоматизированных рабочих места операторов информационно взаимосвязаны посредством аппаратурно-программных средств с бортовым пилотажно-навигационным и радиоэлектронным оборудованием пилотируемого вертолета и с интерфейсом БВ, а также наземным командным пунктом управления аэромобильным комплексом БВ.
Недостатком этого технического решения является недостаточная устойчивость управления беспилотным летательным аппаратом. Этот недостаток связан с тем, что в техническом решении, описанном в патенте РФ №2403181, контроль пространственного положения беспилотного вертолета (БВ) осуществляется оператором пилотируемого вертолета с помощью индикатора слежения БВ автоматизированного рабочего места, на который по радиоканалу приема/передачи с борта БВ передаются данные бортовой навигационной системы. Полученные данные о пространственном положении БВ не могут быть объективными и независимыми, т.к. в данном случае единственным источником информации является навигационная система БВ, которая может иметь отказы, ошибки определения пространственного положения, в том числе в результате активного воздействия помех или ложных сигналов спутниковой навигационной системы. Кроме того, управление БВ может быть полностью перехвачено.
Техническим результатом заявляемого изобретения является повышение устойчивости управления беспилотным летательным аппаратом вертолетного типа аэромобильного авиационного комплекса.
Под устойчивостью управления понимается способность контура управления беспилотным летательным аппаратом, образованного навигационным, радиолокационным, радиосвязным, вычислительным и исполнительным оборудованием комплекса, выдерживать заданную или корректируемую оператором траекторию полета с необходимой точностью при возникновении частичных отказов оборудования или воздействии помех, в том числе преднамеренных.
Требуемый технический результат достигается за счет включения в состав аэромобильного комплекса с беспилотным летательным аппаратом вертолетного типа (БЛА ВТ) многофункциональной бортовой радиолокационной станции (БРЛС) с дополнительными режимами вторичной радиолокации (работа БРЛС с объектами, излучающими ответный сигнал на запрос БРЛС) и радиосвязи, а также за счет оснащения БЛА ВТ радиолокационным маяком-ответчиком и терминалом высокоскоростной радиосвязи. Многофункциональная БРЛС, установленная на борту пилотируемого вертолета, обеспечивает независимое от параметров навигационной системы БЛА ВТ автоматическое радиолокационное слежение за траекторией полета БЛА ВТ по кодовому радиолокационному ответчику из состава БЛА ВТ в дополнение к параметрам бортовой навигационной системы передаваемым на автоматизированное рабочее место оператора полета БЛА ВТ, радиолокационный контроль воздушной и наземной обстановки с целью обеспечения безопасности полета БЛА ВТ и предупреждения столкновений с наземными объектами и другими летательными аппаратами. Также БРЛС обеспечивает общий радиолокационный контроль ситуационной обстановки в зоне работы для последующего детального обследования с помощью оптико-электронных и радиолокационных средств из состава БЛА ВТ, высокоточное определение координат БЛА ВТ, а также воздушных и наземных объектов в интересах контроля ситуационной обстановки. Кроме того, БРЛС обеспечивает режим радиосвязи пилотируемого вертолета с БЛА ВТ с использованием узких диаграмм направленности антенной системы БРЛС пилотируемого вертолета и антенной системы терминала связи БЛА ВТ, препятствующими перехвату передаваемой информации за счет пространственного закрытия. Тем самым повышая устойчивость управления беспилотным летательным аппаратом вертолетного типа.
Многофункциональная БРЛС пилотируемого вертолета реализована по технологии активных фазированных антенных решеток и позволяет совмещать работу в разных режимах за счет быстрого попеременного переключения режимов и изменения углов отклонения диаграммы направленности антенной системы.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ.
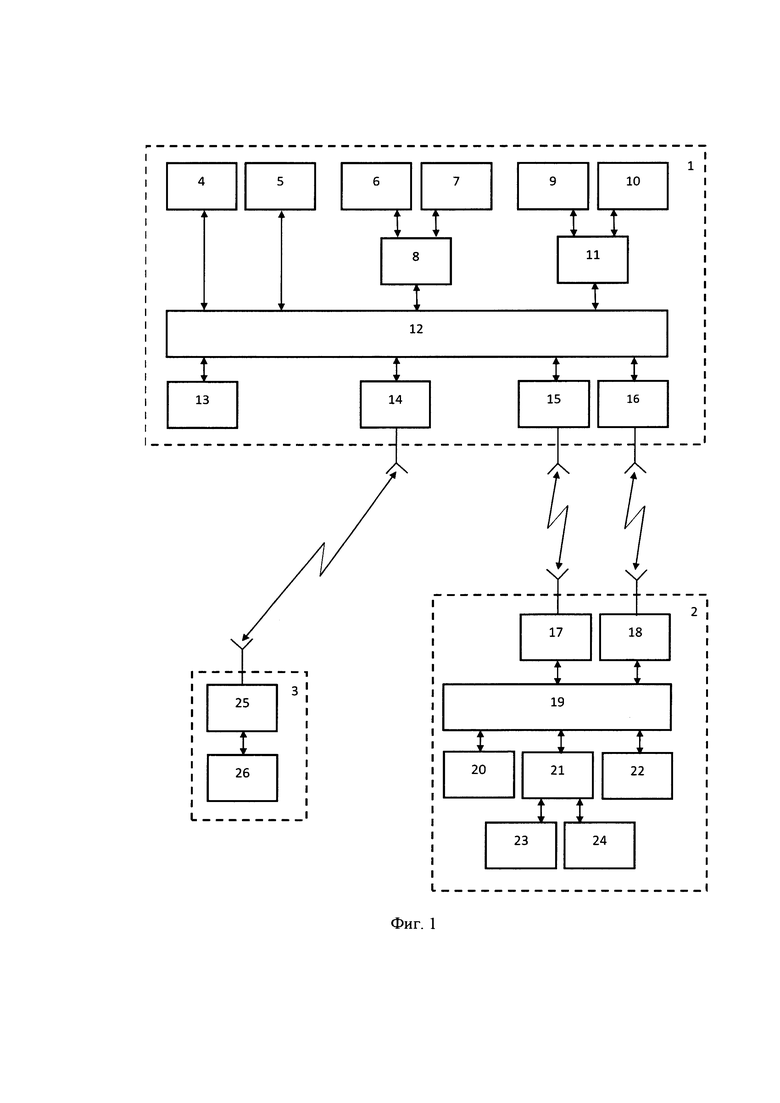
На фиг. 1 представлена структурная схема аэромобильного комплекса с беспилотными аппаратами вертолетного типа. Структурная схема состоит из пилотируемого вертолета - носителя (ПВН) 1, беспилотного летательного аппарата вертолетного типа (БЛА ВТ) 2 и наземного пункта управления (НПУ) 3, включающих в свой состав многофункциональные индикаторы рабочего места летчика-оператора пилотируемого вертолета-носителя 4, органы управления рабочего места летчика-оператора ПВН 5, многофункциональные индикаторы автоматизированного рабочего места оператора полетом БЛА ВТ 6, органы управления автоматизированного рабочего места оператора полетом БЛА ВТ 7, вычислительные средства автоматизированного рабочего места оператора полетом БЛА ВТ 8, многофункциональные индикаторы автоматизированного рабочего места оператора целевых нагрузок БЛА ВТ 9, органы управления автоматизированного рабочего места оператора целевых нагрузок БЛА ВТ 10, вычислительные средства автоматизированного рабочего места оператора целевых нагрузок БЛА ВТ 11, вычислительную систему комплекса бортового радиоэлектронного оборудования пилотируемого вертолета-носителя 12, пилотажно-навигационную систему пилотируемого вертолета-носителя 13, комплекс средств связи пилотируемого вертолета-носителя 14, командно-информационную радиолинию связи ПВН с БЛА ВТ 15, многофункциональную бортовую радиолокационную систему ПВН 16, командно-информационную радиолинию связи БЛА-ВТ с ПВН 17, радиолокационный маяк ответчик с терминалом связи БЛА ВТ 18, вычислительную систему комплекса бортового радиоэлектронного оборудования БЛА ВТ 19, пилотажно-навигационную систему БЛА ВТ 20, блок управления целевыми нагрузками (электронно-оптической и радиолокационной системами и другими системами) 21, блок траекторного управления полетом БЛА ВТ 22, электронно-оптическую систему БЛА ВТ 23, радиолокационную систему БЛА ВТ 24, систему радиосвязи взаимодействующего наземного пункта с комплексом средств связи пилотируемого вертолета-носителя 25, радиоэлектронное оборудование взаимодействующего наземного пункта управления пилотируемого вертолета-носителя 26.
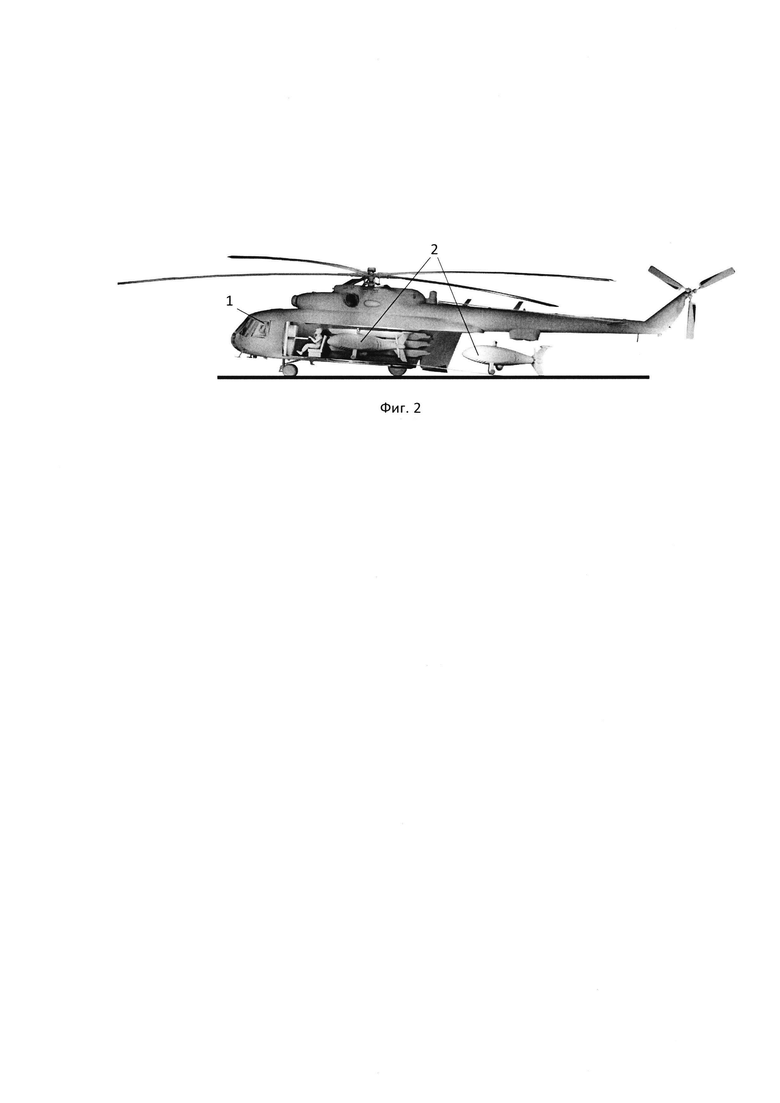
На фиг. 2 показано техническое решение пилотируемого вертолета -носителя ПВН 1в варианте транспортирования двух БЛА ВТ 2.
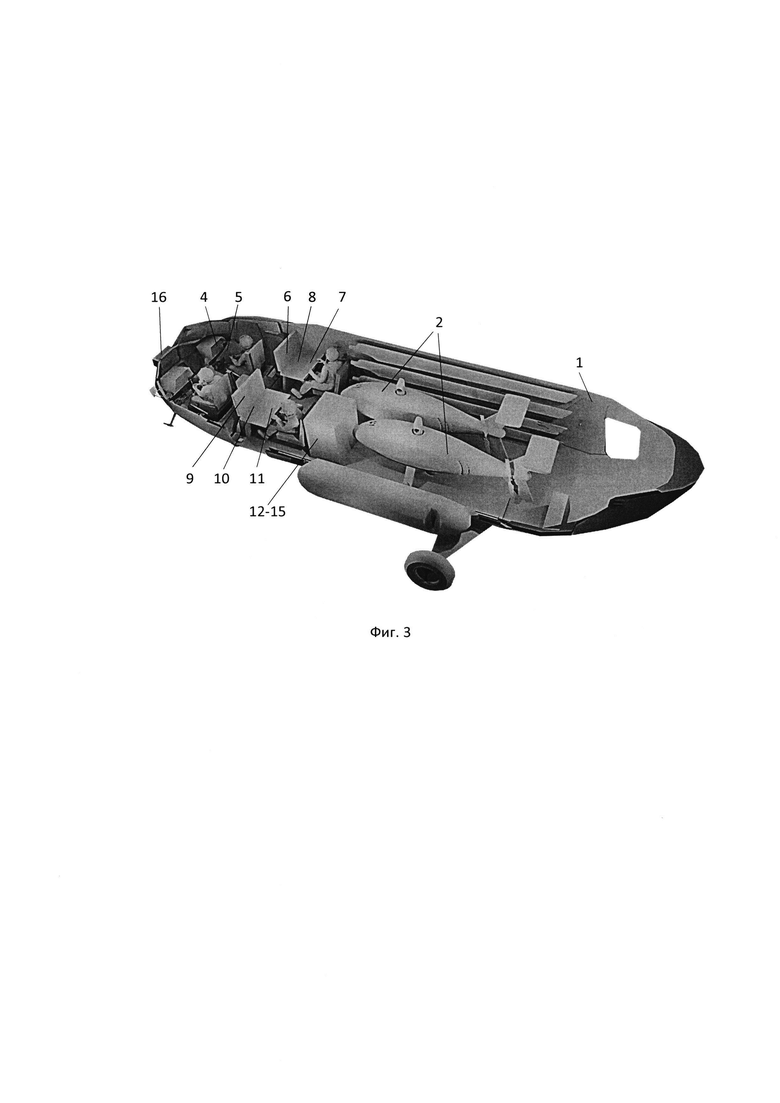
На фиг. 3 показано размещение БРЛС 16, БЛА ВТ 2, рабочих мест экипажа и оборудования в фюзеляже пилотируемого вертолета - носителя ПВН 1.
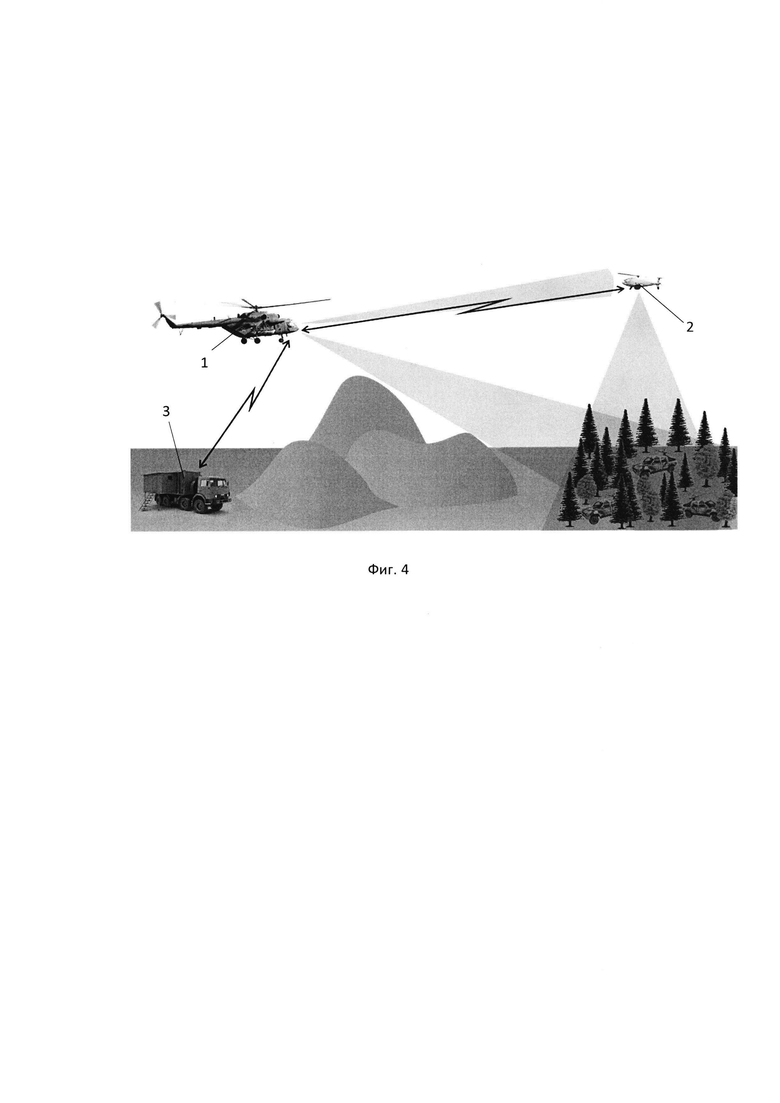
На фиг. 4 изображен пример функционирования пилотируемого вертолета-носителя ПВН 1 с беспилотным летательным аппаратом вертолетного типа БЛА ВТ 2.
Аэромобильный комплекс с БЛА ВТ содержит пилотируемый вертолет-носитель 1 (далее ПВН), один или два беспилотных летательных аппарата вертолетного типа 2 (БЛА ВТ). Кабина экипажа ПНВ оснащена рабочим местом летчика, рабочим местом летчика-оператора с многофункциональными индикаторами 4 и многофункциональными органами управления 5 из состава комплекса бортового радиоэлектронного оборудования ПВН, автоматизированным рабочим местом оператора полетом БЛА ВТ с многофункциональными индикаторами 6, органами управления 7 и вычислительными средствами 8, автоматизированным рабочим местом оператора целевых нагрузок (например, электронно-оптических и радиолокационных систем БЛА ВТ) с многофункциональными индикаторами 9, органами управления 10 и вычислительными средствами 11.
Комплекс бортового радиоэлектронного оборудования ПВН 1 построен вокруг вычислительной системы 12, объединяющей посредством интерфейсов информационного взаимодействия (например, Gigabit Ethernet, МКИО, ARINC-825) функционирование систем и устройств комплекса, в том числе многофункциональных индикаторов 4 и органов управления 5 летчика-оператора ПВН, автоматизированных рабочих мест оператора полетом БЛА ВТ и оператора целевых нагрузок, комплекса пилотажно-навигационного оборудования 13, комплекса средств связи 14, командно-информационной радиолинии связи ПВН 1 с БЛА ВТ 2, многофункциональную радиолокационную систему 16.
Комплекс бортового радиоэлектронного оборудования БЛА ВТ 2 построен вокруг вычислительной системы 19, объединяющей посредством интерфейсов информационного взаимодействия (например, Gigabit Ethernet, МКИО, ARINC-825) функционирование систем и устройств комплекса, в том числе аппаратуры командно-информационной радиолинии связи 17, радиолокационного маяка ответчика с терминалом высокоскоростной связи 18, пилотажно-навигационной системы 20, блока управления 21 целевыми нагрузками (электронно-оптической системой 23 и радиолокационной системой 24), блока траекторного управления 22.
Пилотажно-навигационный комплекс 13 ПВН включает в себя инерциальную систему, приемник сигналов глобальной навигационной спутниковой системы, доплеровский измеритель составляющих скорости, радиовысотомер, автоматический радиокомпас, магнетометр, систему воздушных сигналов.
Комплекс средств связи 14 ПВН включает в себя средства телефонной, и телекодовой радиосвязи для воздушных судов в метрового, дециметрового и декаметрового диапазонах радиоволн и служит для обеспечения радиосвязи между взаимодействующими летательными аппаратами и радиосвязным оборудованием 25 взаимодействующего наземного пункта управления.
Аппаратура командно-информационной радиолинии 15 ПНВ, состоящая из каналов радиосвязи, взаимодействует с аппаратурой командно-информационной радиолинии 17 БЛА ВТ.
Многофункциональная бортовая радиолокационная система (далее БРЛС) 16 ПВН имеет режимы обзора воздушного пространства для обнаружения летательных аппаратов в зоне контроля, режимы обзора земной поверхности с низким и высоким (переднебоковой обзор с синтезированием антенного раскрыва) разрешением для обеспечения ситуационной осведомленности в зоне контроля и поиска объектов, режим обнаружения радиолокационного маяка ответчика 18 БЛА ВТ по кодовому сигналу запроса для дискретного слежения за траекторией полета БЛА ВТ, режим высокоскоростной пакетной радиосвязи с БЛА ВТ 2.
В процессе работы аэромобильного комплекса с БЛА ВТ радиолокационная информация о воздушной и наземной обстановке в зоне контроля по маршруту полета аэромобильного комплекса отображается на одном из многофункциональных индикаторов 4 рабочего места летчика-оператора ПВН. По этой информации летчик-оператор осуществляет поиск объектов, представляющих интерес в соответствии с полетным заданием. При принятии решения об обследовании обнаруженного объекта оператор полета БЛА ВТ изменяет маршрут полета БЛА ВТ и направляет к этому объекту БЛА ВТ для детального обследования с помощью целевых нагрузок БЛА ВТ.
Радиолокационный маяк ответчик 18 БЛА ВТ по умолчанию находится в режиме приема запросного сигнала от БРЛС 16. Для обнаружения радиолокационного маяка ответчика 18 БЛА ВТ БРЛС 16 осуществляет электронное сканирование пространства, подавая кодовые запросные сигналы. БРЛС, получив кодовый ответный сигнал от радиолокационного маяка ответчика 18, осуществляет измерение относительного пространственного положения маяка ответчика (дальность, угол азимута и угол места) и дискретное сопровождение БЛА ВТ.
Полученные координаты маяка ответчика пересчитываются в географические координаты по параметрам пилотажно-навигационного комплекса 13 ПВН вычислительной системой комплекса бортового радиоэлектронного оборудования 12 ПВН и поступают на многофункциональные индикаторы 6 автоматизированного рабочего места оператора полетом БЛА ВТ для объективного контроля траектории полета и оценки отклонений от заданной траектории.
Кроме того, на одном из многофункциональных индикаторов 6 автоматизированного рабочего места оператора полета БЛА ВТ отображается радиолокационная информация о воздушной и наземной обстановке для предупреждения возможных столкновений БЛА ВТ с другими летательными аппаратами или наземными препятствиями по маршруту полета БЛА ВТ. При возникновении угрозы столкновения оператор полета БЛА ВТ с помощью органов управления 7 автоматизированного рабочего места производит действия по изменению траектории полета БЛА ВТ для уклонения от столкновения.
Аппаратура командно-информационной радиолинии 15 ПВН обеспечивает передачу команд траекторного управления от автоматизированного рабочего места (6, 7, 8) оператора траекторией полета БЛА ВТ на аппаратуру командно-информационной радиолинии 17 БЛА ВТ, вычислительную систему комплекса бортового радиоэлектронного оборудования 19 БЛА ВТ и блок траекторного управления 22 БЛА ВТ. Аппаратура командно-информационной радиолинии 15 ПНВ обеспечивает прием информации, поступающей через аппаратуру командно-информационной радиолинии 17 БЛА ВТ от пилотажно-навигационной системы 20 БЛА ВТ о пространственном положении БЛА ВТ, служебной информации о состоянии и функционировании бортового оборудования, а также информации от систем целевой нагрузки БЛА ВТ - электронно-оптической системы 23 и радиолокационной системы 24.
Радиолокационный маяк ответчик с терминалом высокоскоростной связи 18 совместно с БРЛС 16 в режиме пакетной радиосвязи образуют дополнительный высокоскоростной канал радиосвязи ПВН и БЛА ВТ. Относительно высокие энергетические параметры и узкие диаграммы направленности БРЛС 16 по сравнению с параметрами командно-информационной радиолинии связи 14 обеспечивают высокую помехоустойчивость и пространственное закрытие передаваемой информации.
Организация информационного взаимодействия аппаратурно-программных средств комплексов бортового радиоэлектронного оборудования ПВН 1 и БЛА ВТ 2 с помощью каналов высокоскоростной радиосвязи объединяет их в единую вычислительную систему, обеспечивает корреляцию параметров пилотажно-навигационной системы 20 БЛА ВТ с параметрами более оснащенной и высокоточной пилотажно-навигационной системы 13 ПВН.
Дополнение информационного взаимодействия комплексов радиоэлектронного оборудования ПВН 1 и БЛА ВТ 2 высокоточным объективным радиолокационным измерением параметров траектории полета обеспечивает независимую обратную связь в контуре управления полетом БЛА ВТ 2, тем самым повышая устойчивость управления и точность заданной траектории полета БЛА ВТ 2.
Совокупность указанных выше информационных связей совместно с объективным радиолокационным контролем ситуационной обстановки в зоне контроля, а также обнаружение опасного сближения БЛА ВТ с другими летательными аппаратами и наземными препятствиями позволяет обеспечить применение БЛА ВТ в единых порядках с пилотируемыми летательными аппаратами вертолетного типа при решении поисковых задач.
В соответствии с функциональными задачами аэромобильного комплекса с БЛА ВТ техническое решение грузовой кабины ПВН 1 может быть решено для транспортирования и применения одного или двух БЛА ВТ. Решение ПВН 1 в варианте для транспортировки двух БЛА ВТ 2, приведено на фиг. 2.
Пилотируемый вертолет-носитель выполнен с транспортной кабиной, достаточной для размещения двух БЛА-ВТ 2 с демонтированными лопастями несущих винтов, размещаемыми на специальных устройствах крепления вдоль борта, двух дополнительных рабочих мест оператора полета БЛА ВТ 2 и оператора целевых нагрузок, а также стоек с аппаратурой автоматизированных рабочих мест и другой необходимой аппаратурой из состава комплекса (фиг. 3).
Функционирование аэромобильного комплекса с БЛА ВТ осуществляется следующим образом.
В соответствии с полетным заданием, полученным на вертодроме базирования или по команде, полученной с взаимодействующего наземного пункта управления 3 ПВН 1 с одним или двумя БЛА ВТ 2 на борту осуществляет перелет, в том числе в составе вертолетной группы, в район применения аэромобильного комплекса. В районе применения экипаж ПВН 1 выбирает площадку, пригодную для приземления, производит посадку и выгрузку силами экипажа одного или двух БЛА ВТ 2. На БЛА ВТ устанавливаются лопасти несущей системы вертолета и другие работы по подготовке БЛА ВТ к полету. В вычислительную систему БЛА ВТ 19 загружаются параметры полетного задания. Далее производится запуск двигателя БЛА ВТ 2, взлет, полет на небольшое расстояние и зависание со стабилизацией на висении на высоте около 50 м. Экипаж ПВН производит взлет ПВН 1, оператор полета БЛА ВТ переводит БЛА ВТ в режим полета в зону поиска согласно полетного задания, ПВН осуществляет также полет в зону работы на удалении 20 - 30 км за БЛА ВТ. Летчик-оператор по информации от БРЛС 16 производит контроль ситуационной обстановки, наблюдая радиолокационную информацию на многофункциональных индикаторах 4 и управляя режимами ее работы с помощью органов управления 5 своего рабочего места. Оператор полета БЛА ВТ по радиолокационной информации, наблюдаемой на многофункциональных индикаторах 6 автоматизированного рабочего места, контролирует траекторию полета БЛА ВТ по сигналам от радиолокационного маяка ответчика, а также опасное сближение с другими летательными аппаратами и наземными препятствиями.
В случае возникновения угрозы столкновения БЛА ВТ оператор полета БЛА ВТ с помощью органов управления 7 автоматизированного рабочего места производит команды уклонения от столкновений, которые через командно-информационную линию 15, 17 воздействует на блок траекторного управления 22 БЛА ВТ. В случае сбоев в работе командно-информационной радиолинии 15, 17 используется канал радиосвязи, образованный БРЛС 16 и радиолокационным маяком ответчиком с терминалом связи 18.
При обнаружении летчиком-оператором признаков разыскиваемого объекта по радиолокационной информации, наблюдаемой на индикаторе 4, оператор полета БЛА ВТ направляет БЛА ВТ 2 к этому объекту. При приближении к исследуемому объекту оператор полезных нагрузок, управляя с помощью органов управления 10 автоматизированного рабочего места режимами работы электронно-оптической системы 23 и радиолокационной системы 24 производит детальное исследование объекта, наблюдая результаты исследования на индикаторах 9 автоматизированного рабочего места. Результаты исследования объекта могут быть доставлены на взаимодействующий наземный пункт управления 3 с помощью комплекса средств связи 14 ПВН.
После выполнения задания пилотируемый вертолет-носитель 1 и БЛА ВТ 2 возвращаются на выбранную ПВН 1 посадочную площадку и производят посадку. Силами экипажа ПВН 1 БЛА ВТ 2 готовится к повторному полету, или загружается в транспортную кабину ПВН 1 и аэромобильный комплекс возвращается на базу дислокации.
Пример функционирования аэромобильного комплекса с БЛА по поиску объектов представлен на фиг. 4.
Таким образом, при функционировании многофункциональной БРЛС, установленной на борту пилотируемого вертолета, обеспечивается независимое от параметров навигационной системы БЛА ВТ автоматическое радиолокационное слежение за траекторией полета БЛА ВТ по кодовому радиолокационному ответчику из состава БЛА ВТ, радиолокационный контроль воздушной и наземной обстановки с целью обеспечения безопасности полета БЛА ВТ и предупреждения столкновений с наземными объектами и другими летательными аппаратами. Также БРЛС обеспечивает общий радиолокационный контроль ситуационной обстановки в зоне работы для последующего детального обследования с помощью оптико-электронных и радиолокационных средств из состава БЛА ВТ, высокоточное определение координат БЛА ВТ, а также воздушных и наземных объектов в интересах контроля ситуационной обстановки, радиосвязь пилотируемого вертолета с БЛА ВТ узкими диаграммами направленности антенной системы БРЛС пилотируемого вертолета и антенной системы терминала связи БЛА ВТ, препятствующими перехвату передаваемой информации за счет пространственного закрытия. Тем самым повышая устойчивость управления беспилотным летательным аппаратом вертолетного типа.
| название | год | авторы | номер документа |
|---|---|---|---|
| АЭРОМОБИЛЬНЫЙ КОМПЛЕКС БЕСПИЛОТНОГО ВЕРТОЛЕТА | 2009 |
|
RU2403181C1 |
| КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ВЕРТОЛЕТА | 2012 |
|
RU2520174C2 |
| Способ дальнего обнаружения и поражения малозаметных воздушных и наземных целей | 2022 |
|
RU2804559C1 |
| СПОСОБ БОКОВОЙ СТРЕЛЬБЫ ОГНЕВЫМИ СРЕДСТВАМИ ПОРАЖЕНИЯ ЦЕЛЕЙ С ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2740828C1 |
| Способ комплексирования бортовой радиолокационной станции пилотируемого летательного аппарата и бортовых радиолокационных станций беспилотных летательных аппаратов при определении времени задержки на срабатывание полезной нагрузки беспилотных летательных аппаратов | 2020 |
|
RU2750884C1 |
| СИСТЕМА РАЗВЕДКИ НАЗЕМНЫХ ОБЪЕКТОВ И ЦЕЛЕУКАЗАНИЯ | 2016 |
|
RU2625691C1 |
| СПОСОБ МНОГОПОЗИЦИОННОГО НАБЛЮДЕНИЯ, КОНТРОЛЯ И УПРАВЛЕНИЯ НАД ПОЛЕТАМИ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ АВИАЦИОННЫХ СИСТЕМ В ОБЩЕМ ВОЗДУШНОМ ПРОСТРАНСТВЕ | 2019 |
|
RU2710983C1 |
| Способ дальнего обнаружения и распознавания малозаметных воздушных целей | 2022 |
|
RU2802089C1 |
| Система управления полётами, заходом на посадку и посадкой вертолетов для оборудования стартовых командных пунктов надводных кораблей и диспетчерских пунктов, размещаемых на судах и морских платформах | 2017 |
|
RU2667654C1 |
| Беспилотный привязной авиационный комплекс для внесения пестицидов и агрохимикатов в точном земледелии | 2020 |
|
RU2769411C1 |
Аэромобильный комплекс с беспилотным летательным аппаратом вертолетного типа содержит пилотируемый вертолет-носитель, беспилотный летательный аппарат вертолетного типа, наземный пункт управления, многофункциональную бортовую радиолокационную станцию с дополнительными режимами вторичной радиолокации и радиосвязи. Беспилотный летательный аппарат содержит радиолокационный маяк-ответчик и терминал высокоскоростной радиосвязи. Обеспечивается повышение устойчивости управления беспилотным летательным аппаратом вертолетного типа. 4 ил.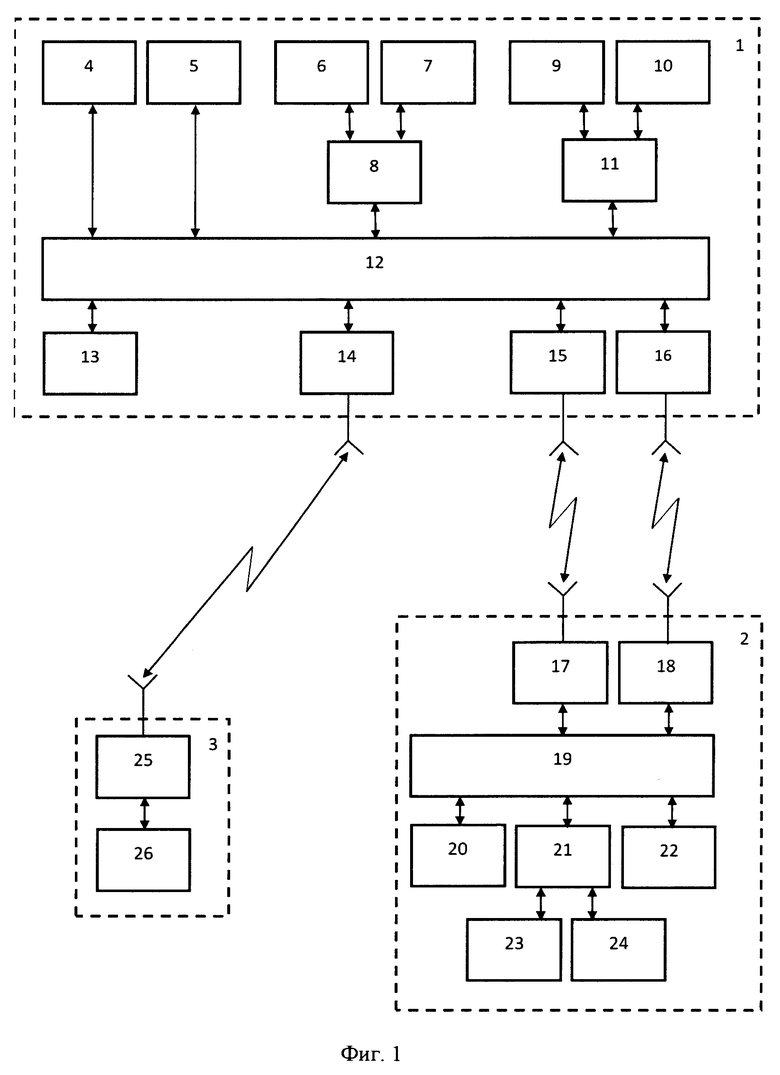
Аэромобильный комплекс с беспилотным летательным аппаратом вертолетного типа, состоящий из пилотируемого вертолета - носителя, беспилотного летательного аппарата вертолетного типа и наземного пункта управления, отличающийся тем, что в состав аэромобильного комплекса с беспилотным летательным аппаратом вертолетного типа включена многофункциональная бортовая радиолокационная станция с дополнительными режимами вторичной радиолокации и радиосвязи, обеспечивающими взаимодействие бортовой радиолокационной станции с объектами, излучающими ответный сигнал на запрос бортовой радиолокационной станции, при этом беспилотный летательный аппарат вертолетного типа оснащен радиолокационным маяком-ответчиком и терминалом высокоскоростной радиосвязи, позволяющими обеспечивать независимое от параметров навигационной системы беспилотного летательного аппарата вертолетного типа автоматическое радиолокационное слежение за траекторией полета беспилотного летательного аппарата вертолетного типа по кодовому радиолокационному ответчику из состава беспилотного летательного аппарата вертолетного типа, радиолокационный контроль воздушной и наземной обстановки с целью обеспечения безопасности полета беспилотного летательного аппарата вертолетного типа и предупреждения столкновений с наземными объектами и другими летательными аппаратами, при этом бортовая радиолокационная станция с дополнительными режимами вторичной радиолокации и радиосвязи обеспечивает общий радиолокационный контроль ситуационной обстановки в зоне работы для последующего детального обследования с помощью оптико-электронных и радиолокационных средств из состава беспилотного летательного аппарата вертолетного типа, высокоточное определение координат беспилотного летательного аппарата вертолетного типа, а также воздушных и наземных объектов в интересах контроля ситуационной обстановки, при этом бортовая радиолокационная станция с дополнительными режимами вторичной радиолокации и радиосвязи обеспечивает радиосвязь пилотируемого вертолета с беспилотным летательным аппаратом вертолетного типа узкой диаграммой направленности антенной системы бортовой радиолокационной станции пилотируемого вертолета и антенной системы терминала связи беспилотного летательного аппарата вертолетного типа, препятствующими перехвату передаваемой информации за счет пространственного закрытия.
| Авиационный комплекс с БЛА | 2019 |
|
RU2735483C1 |
| Воздухоплавательный роботизированный аппарат для мониторинга и внесения средств защиты растений, удобрений в точном земледелии | 2019 |
|
RU2703198C1 |
| US 20200047886 A1, 13.02.2020 | |||
| US 9475575 B2, 25.10.2016 | |||
| CN 110579741 A, 17.12.2019 | |||
| US 10571561 B2, 25.02.2020. | |||

