Изобретение относится к системам управления траекторией движения беспилотного летательного аппарата (БПЛА) для точной аэрофотосъемки земной поверхности и высокоточного приведения к заданному объекту.
Известна система управления БПЛА, использующая в качестве радиолокационного визира (измерителя координат и параметров объекта назначения, координатора) одноканальную бортовую РЛС сантиметрового диапазона с фазоманипулированным зондирующим сигналом [1], который с помощью известных технологий обеспечивает более высокие точность сопровождения цели и помехозащищенность по отношению к активным и пассивным помехам [2, 3]. Кроме координатора система управления беспилотным летательным аппаратом содержит систему автопилотирования (автопилот), соединенную с бортовой электронно-вычислительной машины (ЭВМ), которая выполнена с возможностью подключения к пульту предстартовой подготовки и ввода полетного задания, который расположен в месте старта БПЛА. Координатор содержит передатчик, в котором формируется импульсный зондирующий сигнал с изменением фазы несущей частоты псевдослучайным двоичным кодом, антенну, механически связанную с приводом антенны, приемник, синхронизатор, дальномер (счетчик дальности) и устройство обработки сигналов, включающее фильтр сжатия сигналов, пороговое и устройство фиксации координат, формирующее сигналы дальности и углового положения отраженных сигналов, поступающих в бортовой ЭВМ. Бортовая ЭВМ определяет координаты истинной цели, сопоставляет данные о местоположении БПЛА, измеренные автопилотом, сданными о местоположении истинной цели и формирует сигналы коррекции курса БПЛА, поступающие на автопилот.
Недостатком системы управления является ее низкая эффективность при необходимости приведения БПЛА к нерадиоконтрастному подвижному объекту -цели, а также снижение точности определения дальности до цели при длительном полете БПЛА из-за расхождения бортовой временной шкалы с истинной единой шкалой времени UTC [4].
Известна система управления беспилотным летательным аппаратом [5]. Она включает автопилот, вход и выход которого соединены соответственно с первым выходом и вторым входом бортовой ЭВМ, первый вход которой является входом для подключения к пульту предстартовой подготовки и ввода полетного задания, и радиолокационный координатор с фазоманипулированным зондирующим сигналом, который содержит антенну, соединенную сигнальными входом и выходом с передатчиком и приемником соответственно и механически связанную с приводом антенны, синхронизатор, дальномер и устройство обработки сигналов, в состав которого входят фильтр сжатия сигналов, пороговое устройство и устройство фиксации координат, входы которого с первого по третий подключены соответственно к выходу порогового устройства, выходу дальномера и информационному выходу привода антенны, а выходы, на которых формируются значения величин дистанции и углового положения отраженных сигналов, подключены к четвертому и пятому входам бортовой ЭВМ, шестой вход которой и вход передатчика подключены к первому выходу синхронизатора, передающему импульсную последовательность с частотой зондирования, второй выход которого, передающий последовательность импульсов синхронизации, подключен ко второму входу дальномера, первый вход которого и вход приемника по сигналу окончания зондирующего импульса подключены ко второму выходу передатчика, гетеродинный выход которого соединен с гетеродинным входом приемника. Управляющие входы блока формирования порога, по сигналу признака режима и сигналу задания масштаба подключены соответственно к пятому и седьмому выходам бортовой ЭВМ, выход блока формирования порога подключен к уровневому входу порогового устройства, а соответствующие сигнальные входы -к выходам приемника, на которых формируются усредненное значение интенсивности шума и усредненное значение интенсивности отраженных сигналов, кодовый выход передатчика и выход видеосигнала приемника подключены к первым сигнальным входам соответственно первого и второго переключателей, управляющие входы которых соединены со вторым выходом бортовой ЭВМ, а вторые сигнальные входы подключены соответственно к третьему и четвертому выходам бортовой ЭВМ, с которых передаются последовательность бинарного массива измерений и последовательность эталонного бинарного массива, первый и второй входы фильтра сжатия сигналов подключены к выходам соответственно первого и второго переключателей, а его выход соединен с сигнальным входом третьего переключателя, управляющий вход которого подключен к шестому выходу бортовой ЭВМ, а соответствующие выходы - к сигнальному входу порогового устройства и сигнальному входу устройства фиксации максимума, выход которого, передающий сигнал, характеризующий местоположение бинарного массива измерений на эталонной карте, соединен с третьим входом бортовой ЭВМ. К недостаткам аналога следует отнести:
- низкая эффективность системы при работе БПЛА по подвижному объекту - цели, так как оно предназначено для приведения его в заданную точку земной поверхности, жестко привязанной к географическим координатам;
- снижение точности определения дальности до цели (при сравнении ее величины с заложенной при предполетной подготовке) при длительном полете БПЛА из-за расхождения бортовой временной шкалы с истинной единой шкалой времени UTC [4];
- низкая надежность, увеличенная масса и потребление энергии из-за использования антенны, механически связанной с приводом.
Известен беспилотный мобильный комплекс, который по большинству существенных признаков принят за прототип [6]. Беспилотный мобильный комплекс состоит из наземного и бортового оборудования и содержит передатчики GPS, систему наземного оборудования, связанную через систему ввода данных с бортовой ЭВМ, которая связана с системой управления полетом и системой управления фотокамерой, установленной на гироплатформу. В систему наземного оборудования введен блок ввода информации, связанный с наземной ЭВМ. В комплексе имеются связанные с бортовой ЭВМ блоки, причем блок памяти расчетных координат, блок памяти программ коррекции полета, блок памяти данных съемки, блок памяти программы полета введены в систему ввода данных. Блок корректировки введен в систему управления полетом и связан с блоком управления двигателем, блоком управления высотой, блоком управления поворотом. Блок управления интервалом съемки введен в систему управления фотокамерой и связан с фотокамерой.
Комплекс содержит систему А наземного оборудования, систему Б ввода данных, систему В управления полетом, систему Г управления фотокамерой, бортовой ЭВМ и передатчики GPS [4] (спутниковой навигации).
Система А наземного оборудования содержит наземную ЭВМ, с которой связаны передатчик GPS через приемник GPS с наземной ЭВМ связаны также блок ввода информации, наземное приемопередающее устройство и транспортно-пусковая установка.
Система Б ввода данных содержит связанные с бортовой ЭВМ баровысотомер, блок памяти расчетных координат, блок памяти программ коррекции полета, блок памяти данных съемки, блок памяти программы полета, бортовое приемопередающее устройство, связанное с наземным приемопередающим устройством. С бортовой ЭВМ связан также передатчик GPS через приемник GPS в составе системы Б ввода данных.
Система В управления полетом содержит соответственно связанные с бортовой ЭВМ: двигатель - через блок управления двигателем, руль поворота -через блок управления поворотом, руль высоты - через блок управления высотой. Кроме того, с бортовой ЭВМ связан блок корректировки, выходы которого подключены соответственно, к блоку управления двигателем, блоку управления поворотом, блоку управления высотой.
Система Г управления фотокамерой содержит фотокамеру, установленную на гироплатформу. Фотокамера соответственно через блок управления гироплатформой по координате X и блок управления гироплатформой по координате У, связана с бортовой ЭВМ. От нее через блок управления интервалом съемки идет сигнал на фотокамеру, от которой после съемки через блок передачи изображения поступает сигнал для преобразования в бортовой ЭВМ, после чего данные фиксируются в блоке памяти данных съемки.
К недостаткам прототипа следует отнести:
- функционирование его ограничивается только аэрофотосъемкой;
- результаты аэрофотосъемки не передаются на наземное оборудование, следовательно, теряется информационность и оперативность полученных данных, особенно при наличии подвижных объектов на местности;
- низкая эффективность системы при работе БПЛА в том случае, когда его целью является подвижный объект, так как оно предназначено для приведения его в заданную точку земной поверхности.
Техническим результатом предлагаемого изобретения является расширение функциональных возможностей, а именно, кроме аэрофотосъемки заданного района местности, система выполняет функции высокоточной доставки контейнера с грузом к выделенному объекту.
Указанный технический результат достигается тем, что в систему управления беспилотного летательного аппарата, содержащего передатчики сигналов глобальных навигационных спутниковых систем, расположенные на космических аппаратах, бортовое оборудование и систему наземного оборудования, в которую входят наземная ЭВМ и связанные с ней двухсторонними связями наземное приемопередающее устройство, наземный приемник сигналов глобальных навигационных спутниковых систем, транспортно-пусковая установка, блок ввода информации, бортовое оборудование состоит из бортовой ЭВМ, системы ввода данных, системы управления полетом и системы управления фотокамерой, в систему ввода данных входят связанные двухсторонними связями с бортовой ЭВМ блок памяти расчетных координат, блок памяти программ коррекции полета, блок памяти данных съемки, блок памяти программы полета, бортовой приемник сигналов глобальных навигационных спутниковых систем, баровысотомер, бортовое приемопередающее устройство, в систему управления фотокамерой входят фотокамера, к входу которой подключена гироплатформа, связанные двухсторонними связями с бортовой ЭВМ блок управления интервалом съемки, блок передачи изображения, блок управления гироплатформой по координате X, блок управления гироплатформой по координате У, при этом фотокамера связана двухсторонними связями с блоком управления интервалом съемки и блоком передачи изображения, к входу гироплатформы подключен блок управления гироплатформой по координате X, блок управления гироплатформой по координате X подключен к гироплатформе двухсторонними связями, в систему управления полетом входят двигатель, связанный двухсторонней связью с блоком управления двигателем, руль поворота, связанный двухсторонней связью с блоком управления поворотом, руль высоты, связанный двухсторонней связью с блоком управления высотой, при чем блок корректировки, блок управления двигателем, блок управления высотой и блок управления поворотом связаны двухсторонними связями с бортовой ЭВМ, а выход блока корректировки связан с соответствующими входами блоков управления двигателем, управления поворотом, управления высотой, при этом бортовое и наземное приемопередающие устройства связаны через канал радиосвязи, дополнительно введено в систему наземного оборудования рабочее место штурмана-оператора, связанное двухсторонней связью с наземной ЭВМ, а в бортовое оборудование дополнительно введены в систему ввода данных блок хранения цифровых масок изображений объектов и модуль распознавания, связанные двухсторонними связями с бортовой ЭВМ, в систему управления полетом дополнительный модуль с электронным замком сброса, связанный двухсторонней связью с бортовой ЭВМ, при этом бортовой приемник глобальных навигационных спутниковых систем принимает сигналы с m передатчиков глобальных навигационных спутниковых систем, размещенных на космических аппаратах (m>3).
Для организации одновременного управления n БПЛА, каждый из которых принимает сигналы с не менее чем трех передатчиков глобальных навигационных спутниковых систем, в систему наземного оборудования введены связанные с наземной ЭВМ (n-1) рабочих мест штурмана-оператора и (n-1) наземных приемопередающих устройств. Антенна бортового приемопередающего устройства всенаправленная по азимуту, а антенна наземного приемопередающего устройства имеет диаграмму направленности, охватывающую местоположение всех п БПЛА и совместно с узлами наземного приемопередающего устройства обеспечивает необходимый энергетический потенциал для постоянного нахождения всех n БПЛА в зоне устойчивой связи, в которой отношение сигнал/шум на высокочастотном входе приемопередающих устройств всегда превышает заданную величину. Канал связи представляет собой дуплексный радиоканал прямой видимости, имеющий два направления: прямое - с наземного на бортовое приемопередающее устройство и обратное - с бортового на наземное приемопередающее устройство, и состоит из разнесенных в пространстве наземного и бортового приемопередающих устройств, соединенных между собой по эфиру, причем по команде с наземного оборудования один из комплектов бортового оборудования, находящийся на оптимальном расстоянии между наземным оборудованием и вызываемым бортовым оборудованием, назначается ретранслятором сигналов прямого и обратного направления от вызываемого бортового оборудования.
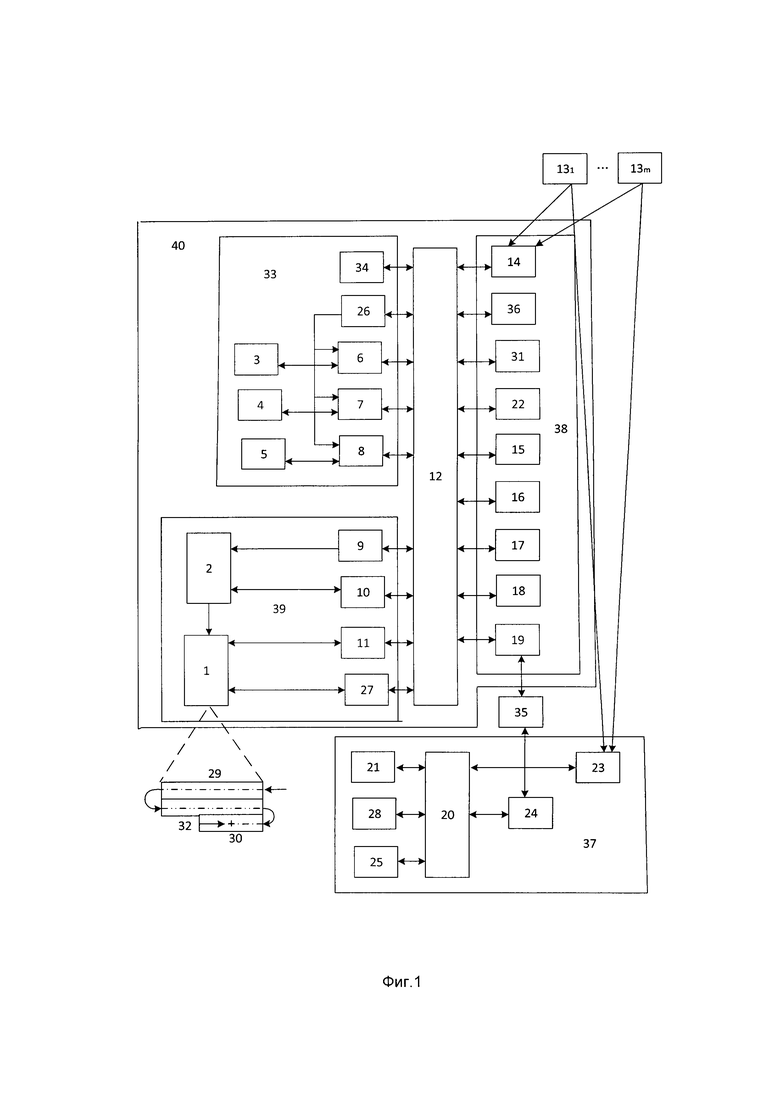
Изобретение поясняется фигурами. Система управления БПЛА показана на фиг. 1 и состоит из бортового оборудования 40, с бортовой ЭВМ 12, наземного оборудования 37, передатчиков 13 сигналов глобальных навигационных спутниковых систем, расположенные на космических аппаратах. Для обеспечения высокой точности навигационных измерений число передатчиков 13 должно быть более 3. Бортовое оборудование 40 совместно с корпусом представляет собой беспилотный летательный аппарат, который содержит систему 38 ввода данных, систему 33 управления полетом, систему 39 управления фотокамерой. Для обеспечения обмена данными между наземным и бортовым оборудованием используются радиоканалы 35 прямого (с Земли) и обратного (на Землю) направлений. Поиск заданного объекта 30 осуществляется методом сканирования района 29, в котором с наибольшей вероятностью он должен находиться, до момента обнаружения и распознавания объекта 30, разворота 32 БПЛА и возвращения к его местоположению объекта - цели.
Система 37 содержит наземную ЭВМ 20, с которой через приемник 23 сигналов глобальных навигационных спутниковых систем связаны передатчики 13 сигналов глобальных навигационных спутниковых систем. С наземной ЭВМ 20 связаны также блок 25 ввода информации, наземное приемопередающее устройство 24 с наземной антенной, транспортно-пусковая установка 21, рабочее место 28 штурмана-оператора.
Система 38 содержит связанные с бортовой ЭВМ 12 баровысотомер 22, блок 15 памяти расчетных координат, блок 16 памяти программ коррекции полета, блок 17 памяти данных съемки, блок 18 памяти программы полета, бортовое приемопередающее устройство 19 с всенаправленной приемопередающей антенной по азимуту, связанное с наземной приемопередающей антенной приемопередающего устройства 24 через радиоканал 35 связи. С бортовой ЭВМ 12 связан также блок 31 хранения цифровых масок изображения объектов, модуль распознавания 36 и бортовой приемник 14 сигналов глобальных навигационных спутниковых систем.
Система 33 содержит соответственно связанные с бортовой ЭВМ 12: двигатель 3 - через блок 6 управления двигателем, руль 4 поворота - через блок 7 управления поворотом, руль 5 высоты - через блок 8 управления высотой. Кроме того, с бортовой ЭВМ 12 связан, например, с помощью разовой команды, дополнительный модуль 34 с электронным замком сброса, а также блок 26 корректировки, к выходу которого подключены блок 6 управления двигателем, блок 7 управления поворотом, блок 8 управления высотой.
Система 39 содержит установленную на гироплатформу 2 фотокамеру 1. Фотокамера 1 через блок 9 управления гироплатформой по координате X и блок 10 управления гироплатформой по координате У связана с бортовой ЭВМ 12. От нее через блок 27 управления интервалом съемки идет сигнал на фотокамеру 1, от которой после съемки через блок 11 передачи изображения поступает сигнал для преобразования в бортовой ЭВМ 12, после чего данные фиксируются в блоке 17 памяти данных съемки.
На фиг. 1 условно показано также прохождение БПЛА маршрута в режиме поиска определенного объекта 30 (указано крестиком) в заданном районе 29 с многократным сканированием местности (показано полосами), заходов-разворотов (указано стрелками), вплоть до обнаружения его, быстрого разворота 32 с минимально возможным радиусом и возврата в его местоположение объекта 30 для выполнения завершающей операции (указано стрелкой).
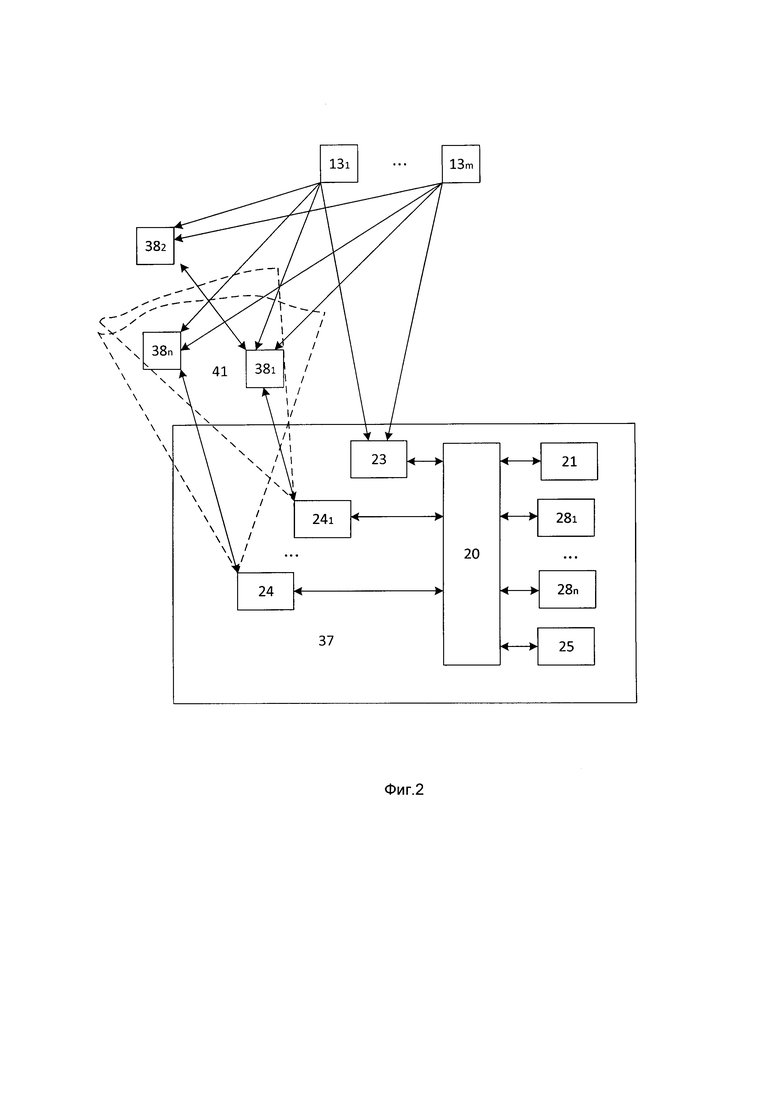
На фиг. 2 изображена структурная схема варианта использования системы управления БПЛА при работе с несколькими комплектами бортового оборудования 40. Особенностью этого варианта исполнения является то, что приемопередающие устройства 19 и 24 должны обеспечивать необходимый энергетический потенциал совместно с диаграммой направленности 41 антенны наземного приемопередающего устройства 24, которая должна охватывать все комплекты бортового оборудования 40, так, чтобы они постоянно находились в зоне устойчивой связи (отношение сигнал/шум на входе приемников устройств 19 и 24 всегда превышал заданную величину). Для обеспечения необходимого энергетического потенциала в узлах устройств 19 и 24 должны быть малые шумы входных высокочастотных цепей, использованы помехоустойчивое кодирование, перемежение символов, эффективная модуляция, усилитель мощности с высоким коэффициентом полезного действия [7].
При выходе БПЛА за радиогоризонт относительно антенны наземного приемопередатчика, с помощью наземной ЭВМ 20 под контролем штурмана-оператора по известному местоположению, хранящемуся в памяти ЭВМ 20, выбирается другой БПЛА (отмечен на фиг. 2 наземным оборудованием 38), оптимально находящийся относительно вышедшего за радиогоризонт БПЛА и наземного оборудования, при этом все три объекта находятся в зоне устойчивой связи относительно друг друга.
Система управления БПЛА работает в режимах аэрофотосъемки и поиска заданного объекта следующим образом.
С помощью наземной ЭВМ 20 в зависимости от полетного задания рассчитываются параметры программы полета беспилотного летательного аппарата, которая при предполетной подготовке через соответствующие узлы заносится в бортовую ЭВМ 12. Затем последовательно во времени осуществляются следующие операции:
- запуск БПЛА: вводятся с помощью блока 25 полетное задание и план связи, организуется функциональный контроль системы управления и определяется ее готовность. По командам наземной ЭВМ 20 запускается двигатель 3 и транспортно-пусковая установка 21 отправляет БПЛА в полет;
- полет по проложенному маршруту, заданному наземной ЭВМ 20 и поддерживаемому бортовой ЭВМ 12;
- поиск и обнаружение определенного объекта 30, маска которого заложена в блок 31, осуществляется в заданном районе 29;
- распознавание объекта методом корреляции цифрового изображения с соответствующей цифровой маской в блоке 36, определение его координат и времени его обнаружения, передача данных на наземное оборудование 37, разворот 32 и возвращение БПЛА к местоположению объекта 30;
- выполнение завершающей операции, заложенной в полетном задании, например, сброса дополнительного модуля 34;
- возвращение БПЛА, если эта процедура заложена в полетном задании.
Аэрофотографирование земной поверхности с летательного аппарата, предусматривающего получение аэрофотоснимков для создания фотографических карт и планов, называют топографической аэрофотосъемкой. Оно выполняется в конкретном районе 29, под которым понимают участок земной поверхности, подлежащий фотографированию [6]. Границы объекта задаются номенклатурой топографических карт и совпадают с их рамками. Большие по площади объекты разбиваются на съемочные участки, подлежащие аэрофотосъемке за один-два вылета. Размеры наименьших съемочных участков зависят от масштаба создаваемой карты. Средняя длина съемочного участка (в км) определяется по формуле L=2к/1000, где к - знаменатель масштаба аэрофотосъемки. Наименьшие съемочные участки объединяются в один при условии, что размеры его не будут превышать средних размеров, а разность высот средних уровней, трапеций, входящих в участок, не превышать: для равнины 0,1 Нф, для горной местности 0,2 Нф, где Нф - усредненная высота фотографирования [6].
Одним из основных параметров обзора земной поверхности является перекрытие аэрофотоснимков, под которым понимают участки смежных снимков (видеоизображений) с изображением одного и того же участка местности, сфотографированного с разных точек. Различают продольное и поперечное перекрытие аэрофотоснимков. Продольное перекрытие - перекрытие смежных аэрофотоснимков одного маршрута в направлении полета летательного аппарата. Поперечное перекрытие - перекрытие аэрофотоснимков двух смежных маршрутов в направлении, перпендикулярном к направлению полета. Для получения заданной величины перекрытий при выполнении аэрофотосъемки необходимо выдерживать соответствующий базис фотографирования [6].
Аэросъемочные маршруты, как и маршруты поиска определенного объекта 30, выделенного в полетном задании, прокладываются таким образом, чтобы отклонение осей маршрутов от заданного положения на карте не превышало определенных величин, а продольное перекрытие должно лежать в некоторых пределах [6]. Поперечное перекрытие рассчитывается в зависимости от масштаба фотографирования и рельефа и не должно отклоняться от заданного.
Элементы, характеризующие траекторию полета носителя относительно сторон света и уровенной поверхностью, называют навигационными элементами полета. К ним относят угловые величины, характеризующие направление полета, и линейные, определяющие траекторию полета носителя в вертикальной и горизонтальной плоскостях. Одним из важных элементов, определяющих масштаб аэрофотоматериала и поиска заданного объекта 30, является высота полета. Под высотой полета понимают расстояние по вертикали от уровня, взятого на начало отсчета до БПЛА. В зависимости от уровня начало отсчета в практике самолетовождения различают высоты полета: абсолютную истинную: относительную - Ни; барометрическую - Нб; фотографирования - Нф [6].
Одним из основных требований к топографической аэрофотосъемке и поиску заданных объектов является получение изображения земной поверхности без пропусков и разрывов. Это требование является определяющим при выборе траектории полета носителя в районе 29 вероятного нахождения объекта 30.
На маршруте поиска (фиг. 1) БПЛА находится в режиме горизонтального, прямолинейного полета с выдерживанием постоянной скорости и высоты, обхода опасных мест. Маневр носителя, связанный с переходом его с пройденного маршрута на очередной маршрут, называется заходом, от которого зависит точность выхода носителя на ось очередного маршрута, а, следовательно, и точность выдерживания поперечного перекрытия. Для получения точных данных осуществляют предварительную подготовку, в процессе которой фиксируют оптические оси фотокамеры (видеокамеры) относительно строительных осей аппарата.
Наземное оборудование 37 необходимо для решения следующих задач:
1) Планирование полета и съемки - выполняется в интерактивном режиме с использованием джойсика или клавиатуры.
Планирование может осуществляться в географической или локальной системе координат с возможностью редактирования блока, программа оперирует понятиями блока дочек линий и использует достаточно сложный алгоритм оптимального расчета покрытия линиями блока [6]. Выполняется с помощью блока 25 или дополнительного ноутбука, не указанного на фигурах, подключенного к блоку 25. Результат работы программы - подготовленный к исполнению в автоматическом режиме план полета.
2) Выполнение полета. Производится по подготовленному плану. С контролем выполнения по внешним данным от модулей 13 14 и 23. Применение модулей спутниковых систем навигации 13, 14 и 23 является перспективным направлением.
Полет полностью синхронизирован с навигационным приемником и синхронизирован с единым временем проведения съемки и передачи кадров на наземное оборудование 37.
Оператор рабочего места на мониторе «видит» и контролирует в реальном масштабе времени весь процесс полета и аэрофотосъемки, моменты прохождения реперных точек (телевизионная вышка, отдельно стоящий дом и т.п.), текущую траекторию полета, отклонения от программы работы, азимут, положение БПЛА на карте местности, скорость и количество отснятых кадров и т.д.
3) Анализ результатов производится по информации в графическом формате на экране монитора (мониторов) рабочего места 28 штурмана-оператора и в цифровом формате в его обновляемой базе данных. Пользователь может проанализировать статистические параметры полета (вариации высоты, наличие других объектов, их координаты и особенности, количество «важных» кадров, вариации масштаба съемки, вариации перекрытий и другие параметры).
4) Для исключения роли человеческого фактора предусмотрено автоматическое выполнение захода на точки съемки и операций по поиску объекта 30, чтобы повысить качество выполнения съемки и точность доставки дополнительного модуля 34 заданному объекту 30, оставляя за человеком лишь контроль проведения операций.
Координаты маршрута, координаты точек съемки, интервалы времени между спуском затвора фотокамеры 1 или его непрерывная работа вводятся во время предстартовой подготовки в планы полета и планы связи через блок 25 в наземную ЭВМ 20 и через нее блок 24, прямой радиоканал связи, блок 19 - в бортовую ЭВМ 12. Через блок 25 задают число маршрутов, число кадров на маршруте, расчетное полетное время, интервалы и координаты точек съемки и реперных точек, маску объекта 30 (и других менее приоритетных объектов), координаты района 29 его вероятного местоположения. В бортовой ЭВМ 12 данные преобразуются в двоичные коды и заносятся в блок 15 памяти расчетных координат и в блоки 31 и 36. Аналогичным образом данные программы полета в бортовой ЭВМ 12 преобразуются в двоичные коды и фиксируются в блоке 18 памяти программы полета. На основании сравнения текущих координат и данных из блока 15 памяти расчетных координат и блока 18 памяти полета с помощью бортовой ЭВМ 12 происходит формирование кодов коррекции в блоке 16 памяти программ коррекции полета. Затем эти данные поступают в блок 26 корректировки системы 33 управления полетом. На основе данных баровысотомера 22 и бортового приемника глобальных навигационных спутниковых систем 14 определяют текущие координаты БПЛА и производят измерение параметров полета и при наличии отклонения от введенного маршрута полета с помощью блока 26 осуществляют его корректировку за счет воздействия на блок 6 управления двигателем, блок 7 управления поворотом, блок 8 управления высотой. По сигналам от бортовой ЭВМ 12 с помощью блока 9 обеспечивается управление гироплатформой 2 по координате X, с помощью блока 10 - по координате У. С помощью блока 27 управления интервалом съемки обеспечивают срабатывание затвора фотокамеры 1 (разовое или непрерывное) в расчетных точках полета (в заданные интервалы времени) или в районе 29.
От бортовой ЭВМ 12 через блок 27 управления интервалом съемки поступает сигнал на фотокамеру (видеокамеру) 1, от которой через блок 11 передачи изображения поступает видеосигнал для преобразования в бортовую ЭВМ 12, после чего данные одновременно фиксируются в блоке 17 памяти данных съемки и через блок 19, обратный канал связи 35, блок 24, наземную ЭВМ 20 практически в реальном масштабе времени поступает для дальнейшей обработки в рабочее место 28 штурмана-оператора, где решаются задачи выполнения полетного задания и оперативные вопросы. В дальнейшем эти данные с блока 17 сравниваются с данными, поступившими после приема по каналу связи 35, и уточненная информация используется известными способами для создания ортофотоплана на местности и коррекции (при необходимости) цифровой трехкоординатной карты местности [6].
Состав формализованной информации для постановки задачи на применение системы управления БПЛА:
- координаты стартовой позиции комплекса;
- высота и координаты полета беспилотного летательного аппарата на маршруте к району 29 картографирования или поиска объекта 30, выполнения заданных операций по отношению к находящемуся там объекту 30 и возвращения обратно;
- высота съемки района картографирования и время начала проведения заключительного этапа операции;
- размеры и ориентация района картографирования или поиска объекта 30 в зависимости от характеристик подвижного объекта;
- коэффициент перекрытия снимков маршрутов поиска (фиг. 1);
- цифровые маски объектов 30, взятые с разных ракурсов, и расстановка их в порядке приоритета;
- координаты точек посадки.
Формализованная в наземной ЭВМ 20 цифровая информация предназначена для ввода в бортовую ЭВМ 12 беспилотного летательного аппарата. Эта информация служит для автоматического вывода БПЛА в район 29, автоматического построения галсов, управления полетом БПЛА и его цифровой фотокамерой 1, выполняющим роль видеокамеры при длительном спуске затвора в районе картографирования, а также для возвращения к месту старта.
Указания по графику работы должны содержать разрешенные времена начала и окончания полета БПЛА. Продолжительность разрешенного интервала должна быть достаточна для выполнения поставленной задачи. Оценку потребного времени для выполнения задачи можно получить с помощью программно-математического обеспечения наземной ЭВМ 20 по вводимой в нее формализованной координатной информации, ожидаемым скорости и направлению ветра, параметрам движения объекта 30.
Стартовая позиция для применения системы управления БПЛА должна отвечать следующим требованиям [6]:
- наличие свободного пространства для разгона БПЛА после старта при соблюдении условий пуска против ветра.
- наличие ровной свободной горизонтальной площадки.
Развертывание комплекса проводят по прибытию оборудования системы управления БПЛА на выбранную стартовую позицию. Развертывание комплекса считается завершенным, когда беспилотный ЛА прошел этап контроля функционирования и готов к пуску.
При подлете БПЛА к району 29 картографирования и поиска объекта 30 бортовая ЭВМ 12 по расчетной высоте обеспечивает полное покрытие заданного района картографирования с заданным коэффициентом перекрытия.
Для полного покрытия заданного района картографирования развороты выносятся за пределы района (фиг. 1). Благодаря высокоточной навигации и автоматическому управлению БПЛА обеспечивается сплошная съемка заданного района 29, обнаружение заданного объекта 30, с помощью наложения его изображения на определенную маску из базы данных в блоке 31 хранения масок, распознавание его в блоке 31 корреляционными методами, наведения на него бортового оборудования 40 системы и с помощью размыкания электронного замка сброса дополнительного модуля 34 на заданный объект.
В качестве определенного объекта 30 в заданном районе 29 (суша, море, горы и т.п.) могут быть изделия военной техники противника, терпящие бедствие корабли и шлюпки с людьми на море, палатки альпинистов и другие предметы, цифровые фотографии которых с разных ракурсов записаны в базу данных блока 31 хранения масок, соединенного двухсторонними связями с бортовой ЭВМ 12. Границы района 29 определяются в зависимости от полетного задания и характеристик (в части подвижности) намеченного объекта 30. Если требуется отыскать несколько объектов 30, то они с помощью бортовой ЭВМ 12 по данным наземной ЭВМ 20 устанавливаются в блоке 31 хранения масок в порядке приоритета и, если в результате обследования выделенного района 29 не найден объект с высшим приоритетом, то отыскивается объект 30 с более низким приоритетом и так далее.
В модуле 36 распознавания цифровое изображение объекта, построенного в бортовой ЭВМ 12, накладывается на цифровую маску с блока 31 хранения масок, рассчитывается коэффициент корреляции изображений и в случае превышения величиной коэффициента корреляции заданного порога выносится решение об обнаружении заданного объекта 30 и соответствующее донесение с координатами объекта, параметрами его движения через соответствующие блоки передается в рабочее место 28 штурмана-оператора.
После выполнения задания, если это предусмотрено планом полета, бортовая ЭВМ 12 переходит к управлению БПЛА с целью его возврата к точке посадки. Управление на маршруте возврата полностью идентично управлению на маршруте к району 29 картографирования. Отличие заключается только в том, что вместо координат точки съемки бортовая ЭВМ использует координаты места посадки. При приближении БПЛА к месту посадки бортовая ЭВМ 12 выдает команды на снижение беспилотного летательного аппарата, выводит его на глиссаду снижения и приземляет или выдает команду на выпуск парашюта.
Для передачи данных из запоминающего устройства блока 17 может использоваться универсальный последовательный интерфейс USB. При продолжительной работе комплекса и производстве большого числа полетов первичную информацию, доставляемую с БПЛА, сохраняют на съемных накопителях [6].
В качестве примеров конкретного исполнения узлов системы можно указать следующее [6]:
- фотоаппарат - фирмы Rolleimetric D30 (Германия);
- беспилотный летательный аппарат - дистанционно пилотируемый летательный аппарат «Грант» фирмы «Новик» (Москва).
Для других блоков можно использовать комплектующие фирмы Octagon System (США) [6]:
- блок корректировки;
- блок управления интервалом съемки;
- блок памяти расчетных координат;
- блок памяти данных съемки;
- блок памяти программы коррекции полета;
- блок памяти программ полета. Для вновь вводимых блоков:
- блоки 36 и 31 могут быть выполнены программно;
- рабочее место штурмана-оператора 28 может быть выполнено на стандартных серийных изделиях: серийный компьютер, с подключенными дисплеем, стандартной клавиатурой и джойстиком, в том числе и портативный, например, портативный компьютер типа ноутбук фирмы «Toshiba». Мониторов в рабочем месте может быть два - второй для более тщательного рассмотрения объекта 30 (режим «Лупа»);
- в качестве приемопередающих устройств 14 и 19 может быть использована УКВ радиостанция из комплекса технических средств подвижной радиосвязи Р-169 типа Р-169 ВМ [8] или изделие «Бозон» с антеннами типа АФВ-М2ДМ1 - в блоке 19 и антенная фазированная решетка авиационная типа АРФА-РРС - для блока 24.
- дополнительный модуль 34 с электронным замком сброса предназначен для переноса различных материалов (грузов), например, медикаментов - для терпящих бедствие в горах альпинистов, боеприпас - для подрыва изделия военной техники противника, самонадувного при ударе о воду плота - при катастрофе на море и других. Он может быть выполнен в виде пластикового контейнера, электронный замок которого крепится на борту бортового оборудования 40.
В одном из вариантов исполнения изобретения для снижения стоимости системы блоки 2, 9, 10, 14, 17, 27 могут отсутствовать. Фотокамера 1 может быть заменена более дешевой, работающей непрерывно видеокамерой с цифровым выходом, непосредственно связанным с соответствующим входом, например, по интерфейсу USB, бортовой ЭВМ 12.
Таким образом, как видно из описания, именно совокупность существенных признаков изобретения позволяет не только осуществлять качественную трехкоординатную съемку местности, но и обнаруживать с высокой точностью нерадиоконтрастные подвижные объекты, сбрасывать на них соответствующие грузы, находящиеся в дополнительных модулях и автоматически сообщать о выполнении полетного задания на наземное оборудование штурману-оператору.
Литература:
1. Шаров С.И. Основы проектирования координаторов систем управления движущимися объектами. Гособразование СССР, 1990 г.
2. Патент РФ №2114444 на изобретение, опубликовано 27.06.1998.
3. Патент РФ №2124221 на изобретение, дата приоритета 11.02.1998.
4. GPS - глобальная система позиционирования. - М.: ПРИН, 1994, - 76 с.
5. Патент РФ №2189625 на изобретение, опубликовано 20.09.2002 Бюл. №26.
6. Патент РФ №2583851 на изобретение, опубликовано 10.05.2016 Бюл. №13 (прототип).
7. Кейстович А.В., Милов В.Р. Виды радиодоступа в системах подвижной связи. Учебное пособие для вузов - М.: Горячая линия - Телеком, 2015. - 278 с.
8. Патент РФ №2219586 на изобретение, опубликовано 20.12.2003 Бюл. №35.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПИЛОТНЫЙ МОБИЛЬНЫЙ КОМПЛЕКС | 2011 |
|
RU2583851C2 |
| Способ многофункциональной аэросъемки на основе беспилотных воздушных судов для планирования и сопровождения сейсморазведочных работ и многофункциональный аппаратно-программный комплекс для его реализации | 2021 |
|
RU2779707C1 |
| Универсальное мобильное устройство для выполнения аэрофотосъемки с применением различных пилотируемых воздушных средств | 2021 |
|
RU2795778C1 |
| СИСТЕМА РАДИОСВЯЗИ С БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2024 |
|
RU2839424C1 |
| Беспилотный аппарат и комплекс наблюдения для него | 2016 |
|
RU2642202C1 |
| Интеллектуальная система автоматического дистанционного мониторинга состояния и безопасности ЛЭП в непрерывном режиме | 2023 |
|
RU2821208C1 |
| СПОСОБ ПРИМЕНЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И УСТРОЙСТВО УПРАВЛЕНИЯ | 2011 |
|
RU2457531C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ И КОМПЛЕКС АВИАНАБЛЮДЕНИЯ ДЛЯ НЕГО | 2012 |
|
RU2518440C2 |
| Способ мониторинга технического состояния объектов транспорта газа на основе геоинформационной системы | 2021 |
|
RU2780304C1 |
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2390815C1 |
Система управления группой беспилотных летательных аппаратов (БПЛА) содержит систему наземного оборудования и бортовое оборудование для каждого БПЛА группы, связанные через канал радиосвязи. Наземное оборудование содержит ЭВМ и связанные с ней двухсторонними связями наземное приемопередающее устройство, наземный приемник сигналов глобальных навигационных спутниковых систем, транспортно-пусковую установку, блок ввода информации, рабочее место штурмана-оператора. Бортовое оборудование содержит ЭВМ, систему ввода данных, систему управления полетом, систему управления фотокамерой. Система ввода данных содержит блок памяти расчетных координат, блок памяти программ коррекции полета, блок памяти данных съемки, блок памяти программы полета, бортовой приемник сигналов глобальных навигационных спутниковых систем, выполненный с возможностью приема сигналов с не менее чем трех передатчиков глобальных навигационных спутниковых систем, размещенных на космических аппаратах, баровысотомер, бортовое приемопередающее устройство. Система управления фотокамерой содержит гироплатформу, подключенную к входу фотокамеры, блок управления интервалом съемки, блок передачи изображения, блок управления гироплатформой. Система управления полетом содержит блок управления двигателем, блок управления поворотом, блок управления высотой, блок корректировки, модуль с электронным замком сброса. Обеспечивается расширение функциональных возможностей для аэрофотосъемки и доставки грузов. 3 з.п. ф-лы, 2 ил.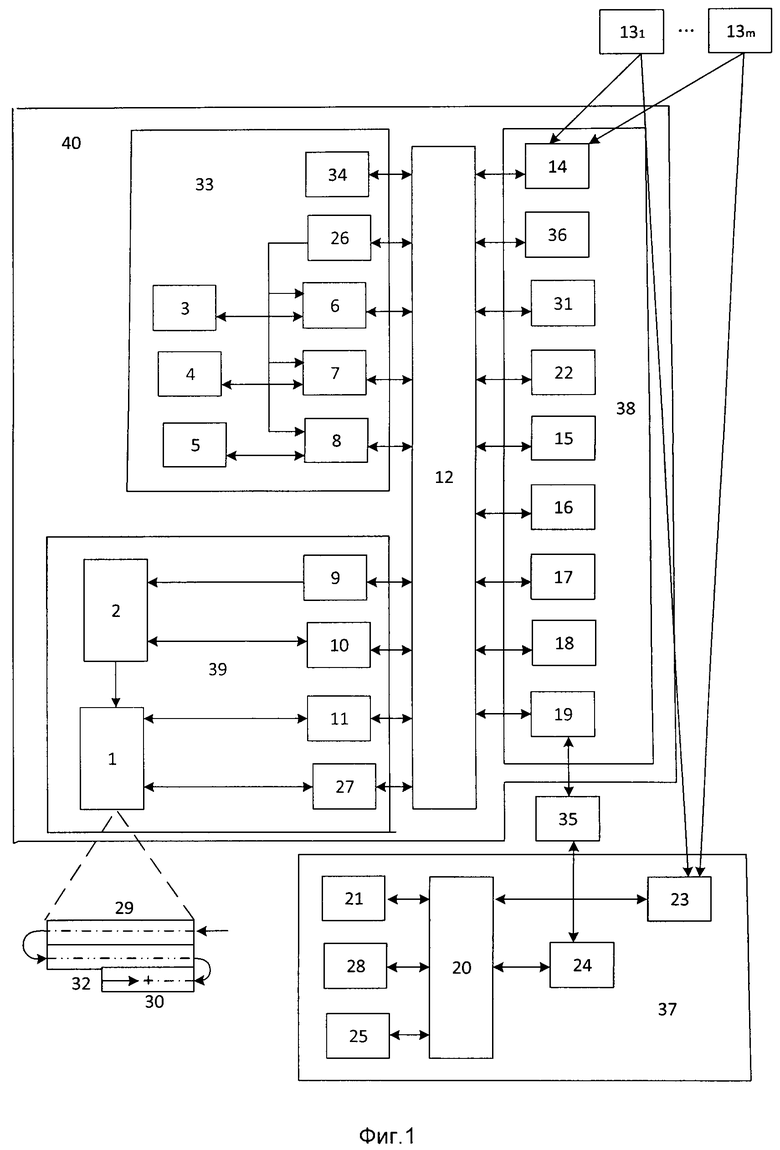
1. Система управления группой беспилотных летательных аппаратов (БПЛА), содержащая систему наземного оборудования и бортовое оборудование для каждого БПЛА группы, связанные через канал радиосвязи;
в состав наземного оборудования входит ЭВМ и связанные с ней двухсторонними связями приемопередающее устройство, приемник сигналов глобальных навигационных спутниковых систем, транспортно-пусковая установка, блок ввода информации;
в состав бортового оборудования каждого БПЛА группы входит ЭВМ, система ввода данных, система управления полетом и система управления фотокамерой, при этом:
система ввода данных содержит связанные двухсторонними связями с бортовой ЭВМ блок памяти расчетных координат, блок памяти программ коррекции полета, блок памяти данных съемки, блок памяти программы полета, бортовой приемник сигналов глобальных навигационных спутниковых систем, баровысотомер, бортовое приемопередающее устройство;
система управления фотокамерой содержит блоки управления по координатам X и Y гироплатформой, на которую установлена фотокамера, блок передачи изображения, при этом фотокамера связана двухсторонними связями с блоком управления интервалом съемки и блоком передачи изображения, к входу гироплатформы подключен блок управления гироплатформой по координате X, блок управления гироплатформой по координате X подключен к гироплатформе двухсторонними связями;
система управления полетом содержит блок управления двигателем, связанный двухсторонней связью с двигателем, блок управления поворотом, связанный двухсторонней связью с рулем поворота, блок управления высотой, связанный двухсторонней связью с рулем высоты, причем блок корректировки, блок управления двигателем, блок управления высотой и блок управления поворотом связаны двухсторонними связями с бортовой ЭВМ, а выход блока корректировки связан с соответствующими входами блоков управления двигателем, управления поворотом, управления высотой,
отличающаяся тем, что в систему наземного оборудования дополнительно введено рабочее место штурмана-оператора, связанное двухсторонней связью с наземной ЭВМ, а в бортовое оборудование дополнительно введены в систему ввода данных блок хранения цифровых масок изображений объектов и модуль распознавания, связанные двухсторонними связями с бортовой ЭВМ, в систему управления полетом дополнительный модуль с электронным замком сброса, связанный двухсторонней связью с бортовой ЭВМ, при этом бортовой приемник глобальных навигационных спутниковых систем выполнен с возможностью приема сигналов с не менее чем трех передатчиков глобальных навигационных спутниковых систем.
2. Система управления группой беспилотных летательных аппаратов по п. 1, отличающаяся тем, что для организации одновременного управления n БПЛА, каждый из которых принимает сигналы с не менее чем трех передатчиков глобальных навигационных спутниковых систем, в систему наземного оборудования введены связанные с наземной ЭВМ (n-1) рабочих мест штурмана-оператора и (n-1) наземных приемопередающих устройств.
3. Система управления группой беспилотных летательных аппаратов по п. 2, отличающаяся тем, что антенна бортового приемопередающего устройства всенаправлена по азимуту, а антенна наземного приемопередающего устройства имеет диаграмму направленности, охватывающую местоположение всех n БПЛА, и совместно с узлами наземного приемопередающего устройства обеспечивает необходимый энергетический потенциал для постоянного нахождения всех n БПЛА в зоне устойчивой связи, в которой отношение сигнал/шум на высокочастотном входе приемопередающих устройств всегда превышает заданную величину.
4. Система управления группой беспилотных летательных аппаратов по п. 2, отличающаяся тем, что канал связи представляет собой дуплексный радиоканал прямой видимости, имеющий два направления: прямое - с наземного на бортовое приемопередающее устройство и обратное - с бортового на наземное приемопередающее устройство, и состоит из разнесенных в пространстве наземного и бортового приемопередающих устройств, соединенных между собой по эфиру, причем по команде с наземного оборудования один из комплектов бортового оборудования, находящийся на оптимальном расстоянии между наземным оборудованием и вызываемым бортовым оборудованием, назначается ретранслятором сигналов прямого и обратного направления от вызываемого бортового оборудования.
| УСТРОЙСТВО И СПОСОБ ДЛЯ ФОРМИРОВАНИЯ ОРТОФОТОПЛАНА | 2022 |
|
RU2796697C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОЛЕТОМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА С ДИФФЕРЕНЦИАЛЬНЫМ ПОЗИЦИОНИРОВАНИЕМ НА ОСНОВЕ СЕТИ CORS | 2017 |
|
RU2704614C1 |
| БПЛА И СПОСОБ ВЫПОЛНЕНИЯ АЭРОФОТОСЪЕМКИ | 2022 |
|
RU2798604C1 |
| Установка барабанного типа для разделения зерновой смеси | 1960 |
|
SU134515A1 |
| CN 101592955 A, 02.12.2009 | |||
| CN 105242684 A, 13.01.2016. | |||

