Область техники, к которой относятся изобретения
Изобретения относятся к аттракционам и могут быть использованы для развлечений или для обучения управлению радиоуправляемыми летательными аппаратами.
Термины, используемые в описании
«Дрон» - управляемый по радиоканалу беспилотный летательный аппарат.
«Коптер» - дрон, построенный по вертолетной схеме с одним и более несущими винтами. Мультикоптер имеет схему с тремя и более несущими винтами.
«Полетная сессия» - установленный период времени осуществления непрерывного полета дрона. Длительность полетной сессии может быть ограничена, например, емкостью бортовой батареи дрона.
«Полигон» или «Полетное пространство» - пространство, предназначенное для полетов дрона.
«Пользователь» - лицо управляющее полетом дрона и формирующее соответствующие команды с помощью пульта управления.
Уровень техники
Известен способ формирования схемы дорожно-транспортного происшествия, включающий фотосъемку и передачу на компьютер изображения, обработку информации, после получения информации о ДТП, заносят информацию в базу данных и одновременно производят старт беспилотного летательного аппарата, с координатами ДТП и данными маршрута беспилотного летательного аппарата, который оснащают модулем ГЛОНАСС/GPS, программным обеспечением, которое формирует в направленном автоматическом режиме заданный маршрут по координатам ДТП, и фото-видео камерой высокого разрешения с высоты 10-50 м, при этом контролируют процесс полета к месту ДТП и фото-видео фиксацию места ДТП при помощи обратной связи, которую осуществляют беспроводным устройством передачи фото и видео изображений, данные фотосъемки с беспилотного летательного аппарата передают на центральный пункт обработки информации (см. RU 2637067 С2).
Место назначения дрона в известном способе это участок дороги, которая характеризуется наличием движения транспорта и пешеходов, а траектория полета не может не пересекать мест, на которых присутствуют люди или транспортные средства под управлением человека. На траектории полета дрока могут также оказаться препятствия в виде высоких зданий, ЛЭП, деревьев, птиц и пр. Планирование полета позволяет избежать столкновения со стационарно расположенными объектами, но не исключает риск столкновения с птицами или другими дронами, в результате чего дрон может упасть в людном месте или на движущийся по дороге автомобиль. Падение дрона может быть вызвано также порывами ветра или его неисправностью. Результатом падения с высоты 10-50 м могут быть как повреждения предметов, так и ранения людей, вплоть до фатальных, что делает не безопасным использование известного решения.
Другим недостатком известного решения является невозможность реализации игровых функций с участием других дронов или использование его в качестве обучения пилотов, так как заданный маршрут формируют в автоматическом режиме, а оператор имеет возможность лишь контроля посредством обратной связи. Этот недостаток ограничивает область применения известного решения.
Известен универсальный мишенно-тренировочный комплекс, содержащий транспортное средство, в котором размещены мишени в виде БЛА разного типа, имитирующие цели разных видов с унифицированным средством для запуска, пункт управления выполнен с возможностью одновременного управления несколькими БЛА разных типов и подключен к удаленному монитору для отображения информации о ходе полетов в режиме реального времени. (см. RU 2612336 С2).
Известное решение позволяет использовать одновременно несколько беспилотных летательных аппаратов, управляемых с пульта управления в качестве аттракциона для развлечения посетителей, осуществляющих управление беспилотных летательных аппаратов, например, в рамках простого полета, или взаимного противостояния летательных аппаратов.
Однако отсутствие строгих ограничений пространства полетов беспилотных летательных аппаратов некоторой локальной областью не позволяет привлекать к управлению беспилотным летательным аппаратом обычных пользователей, не имеющих соответствующих навыков, без угрозы потери летательных аппаратов, что для целей развлечения или обучения является неприемлемым.
Отсутствие ограничений пространства для полетов создает также опасность причинения травмы людям, оказавшимся в зоне осуществления полетов или даже на пути движения летательного аппарата, что также недопустимо в рамках гражданского использования.
Еще одним недостатком известного решения является отсутствие возможности имитации поражения летательных аппаратов друг другом в рамках их противостояния как части развлечения, так как предусмотренное в комплексе реальное поражение объектов требует большого расхода дронов и не может являться приемлемым для целей развлечения.
Известна игровая система, содержащая пульт управления, снабженный приемопередающим блоком, расположенные с возможностью перемещения в игровом пространстве управляемые игровые элементы, имитирующие реальные и/или фантазийные подвижные объекты, каждый из которых снабжен видеокамерой со средством передачи сигнала от нее к средству визуализации, а также средствами механического и/или электрического, и/или волнового воздействия на другие игровые элементы, входящие в систему, средство визуализации сигнала от видеокамеры выполнено в виде одного или двух жидкокристаллических мониторов, укрепленных на голове участника игры с возможностью перекрытия поля зрения одного или обоих глаз (см. RU 97646 U1).
Если допустить, что игровыми элементами являются беспилотные летательные аппараты - дроны, то известное решение позволяет имитировать воздушный бой игровых элементов для развлечения пользователей.
Однако дрон в полете является источником опасности и его столкновение с человеком грозит получением травмы различной степени тяжести. Поэтому отсутствие в каком-либо виде границ полетного пространства исключает возможность использования известного решения с дронами в качестве игровых элементов.
Кроме того, отсутствие мер предотвращения взаимного столкновения дронов, а также их столкновения с другими препятствиями в виде деревьев, столбов и пр. влечет сокращение срока эксплуатации дронов из-за их преждевременного разрушения при столкновении.
Наличие в известном решении средств механического и/или электрического, и/или волнового воздействия не приемлемы для использования с дронами поскольку даже небольшое воздействие на летящий дрон может повлечь падение дрона, а учитывая высоту падения и его разрушение. Так как целью игры является поражение другого игрового, элемента то срок эксплуатации используемых дронов может оказаться минимальным - длительностью всего в одну полетную сессию или даже короче.
Наиболее близким по технической сущности - прототипом является способ, реализованный в аттракционе, включающий осуществление пользователем управления коптером путем перемещая его в замкнутом игровом пространстве посредством установленного в корпусе пульта управления, имеющего органы управления и контроля управления с помощью монитора и бортовой видеокамеры. При этом коптер снабжен контроллером инерциальной измерительной системы в составе акселерометра, гироскопа, магнитометра и барометра, а игровая зона снабжена системой отвода воздушных потоков в составе вытяжного воздуховода и наружного блока (См. RU 2676782 С2).
Недостатком известного решения является необходимость наличия стен и потолка физически ограждающих замкнутое игровое пространство, требующее ограничения скорости дронов в игровой зоне для минимизации опасности их разрушения при столкновении с физической границей замкнутого пространства, что исключает возможность применения скоростных дронов, например, планеров,.
Наличие физического ограждения влечет неизбежное столкновение дронов с границами, следствием чего является помимо прочего падение дронов. При этом даже падение без поломки дрона может сопровождаться его опрокидыванием, препятствующим возобновлению полета без вмешательства обслуживающего персонала. Однако любое проникновние человека в игровую зону с летающими дронами травмоопасно, поэтому требует прерывания сессии и приземления всех находящихся в воздухе дронов. Таким образом, физические границы игровой зоны вызывают неудобство использования из-за неконтролируемой прерываниями длительности сессии, что влечет избыточный расход энергии, вызванный дополнительными посадками и взлетами дронов из-за необходимости прерывания сессии одновременно для всех используемых дронов.
Риск прерывания сессии препятствует также выполнению сложных и длительных маневров и влечет непредсказуемое увеличение длительности фактического исполнения сессии.
Условие физической границы игрового пространства ограничивает его размеры, так как сложно или даже невозможно осуществить физическое ограждение пространства на большой площади, включая наличие потолка для ограничения высоты полетов. Небольшое же пространство, например, автомобильный фургон ограничивает возможность маневрирования дронов, а также не позволяет использовать скоростные летательные аппараты. Указанные недостатки ограничивают область применения известного решения.
Опасность для дронов представляет также их взаимное столкновение или столкновение со специально установленным в игровой зоне препятствием. Столкновения приводят к падениям и разрушению конструкции дронов, что также сокращает срок их жизни.
В процессе полетной сессии неопытный пользователь может сформировать команду, приводящую к полету с недопустимо высокой скоростью снижения, следствием чего может являться удар дрона о пол полетного пространства и его разрушение. Повреждение дрона из-за высокой скорости касании с полом или землей приводит к преждевременному завершению полетной сессии и связанным с этими неудобствами, а также уменьшает срок эксплуатации дронов.
Опасность повреждения дронов также представляет процесс их одновременной посадки, так как при посадке одновременно нескольких летательных аппаратов, осуществляемых вручную разными пользователями возможно пересечение траекторий движения дронов и их столкновение с последующим повреждением.
Наличие подключения посредством свободной привязи к электросети и центральному компьютеру исключает возможность сложного маневрирования дронов, ограничивая использование известного решения, например, в качестве обучения пилотов или даже имитации противостояния дронов.
Необходимость отвода воздушных потоков из замкнутого пространства игровой зоны также избыточно усложняет известное решение.
Наиболее близким по технической сущности - прототипом является аттракцион с дронами включающий игровое замкнутое пространство (игровую зону), снабженное системой управления исполнительных элементов в составе центрального компьютера, светового и звукового оборудования, а также содержащее любое количество игровых роботов, которые выполнены в виде мультикоптеров, с двумя, тремя, четырьмя, шестью или более винтами, которые перемещаются в игровой зоне в режиме запрограммированного или управляемого полета и подключены посредством свободной привязи к электросети и центральному компьютеру, а игровая зона снабжена системой отвода воздушных потоков в составе вытяжного воздуховода и наружного блока. (См. RU 2676782 С2).
Недостатком известного решения является наличие стен и потолка физического ограждения замкнутого игрового пространства, требующего ограничения скорости дронов в игровой зоне для минимизации опасности их разрушения при столкновении с физической границей замкнутого пространства, что исключает возможность применения скоростных дронов, например, планеров.
Наличие физического ограждения влечет неизбежное столкновение дронов со стенками полигона, следствием чего является помимо прочего падение дронов. При этом даже падение без поломки дрона может сопровождаться его опрокидыванием, препятствующим возобновлению полета без вмешательства обслуживающего персонала. Однако любое проникновение человека в игровую зону с летающими дронами травмоопасно, поэтому требует прерывания сессии и приземления всех находящихся в воздухе дронов. Физические границы игровой зоны вызывают неудобство использования из-за неконтролируемой прерываниями длительности сессии, что влечет избыточный расход энергии, вызванный дополнительными посадками и взлетами лронов из-за необходимости прерывания сессии одновременно для всех используемых дронов.
Риск прерывания сессии препятствует также выполнению сложных и длительных маневров и влечет непредсказуемое увеличение длительности фактического исполнения сессии.
Условие наличия физической границы игрового пространства ограничивает его размеры, так как сложно или даже невозможно осуществить физическое ограждение пространства на большой площади, включая наличие потолка для ограничения высоты полетов. Небольшое же пространство, например, автомобильный фургон ограничивает возможность маневрирования дронов, а также не позволяет использовать скоростные летательные аппараты. Указанные недостатки ограничивают область применения известного решения.
Опасность для дронов представляет также их взаимное столкновение или столкновение со специально установленным в игровой зоне препятствием. Столкновения приводят к падениям и разрушению конструкции дронов, что также сокращает срок их жизни.
В процессе полетной сессии неопытный пользователь может сформировать команду, приводящую к полету с недопустимо высокой скоростью снижения, следствием чего может являться удар дрона о пол полетного пространства и его разрушение. Повреждение дрона из-за высокой скорости касании с полом или землей приводит к преждевременному завершению полетной сессии и связанным с этими неудобствами, а также уменьшает срок эксплуатации дронов.
Опасность повреждения дронов также представляет процесс их одновременной посадки, так как при посадке одновременно нескольких летательных аппаратов, осуществляемых вручную разными пользователями возможно пересечение траекторий движения дронов и их столкновение с последующим повреждением.
Наличие подключения посредством свободной привязи к электросети и центральному компьютеру исключает возможность сложного маневрирования дронов, ограничивая использование известного решения, например, в качестве имитации противостояния дронов.
Необходимость отвода воздушных потоков из замкнутого пространства игровой зоны также избыточно усложняет известное решение.
Раскрытие сущности изобретения
Техническим результатом является: повышение безопасности использования, повышение срока службы дрона, снижение средней величины энергозатрат на полетную сессию, повышение удобства использования, обеспечение возможности повышения скорости полета дрона внутри полигона и расширение области применения.
Указанный результат достигается тем, что в способе управления дроном, характеризующемся формированием с помощью пульта пользователя команд управления дроном в пространстве полигона, определяют препятствия, в том числе боковые и нижнюю границы полигона, как совокупность точек пространства, к которым запрещают приближение дрона на расстояние ближе установленной заранее величины буферной зоны, в процессе полета дрона получают с помощью бортовых датчиков данные о положении дрона в пространстве, передают полученные данные посредством каналов беспроводной связи на центральное вычислительное устройство, с помощью которого вычисляют вектор скорости дрона и время сближения с препятствием, корректируют команду управления дроном, уменьшая скорость его сближения с препятствием, так, что бы по мере достижения границы буферной зоны препятствия скорость сближения дрона с препятствием стремилась к нулю.
Кроме того: - нижнюю границу полигона задают выше уровня поверхности, находящейся под пространством полигона;
- препятствием является также верхняя граница полигона, ограничивающая максимальную высоту полета дрона;
- боковые границы полигона определяют относительно географических координат с использованием систем глобального позиционирования;
- боковые границы полигона определяют относительно локальной системы координат разнесенных в пространстве, по меньшей мере, трех маяков, при этом координаты дрона определяют на основе взаимных задержек сигналов указанных маяков, полученных соответствующим бортовым датчиком;
- препятствиями являются также находящиеся внутри полигона объекты;
- препятствиями являются также находящиеся внутри полигона объекты, в том числе другие дроны;
- корректируют команду управления дроном, уменьшая скорость его сближения с препятствием так, чтобы время сближения с границей его буферной зоны оставалось не менее заранее установленной величины;
- осуществляют световое и/или звуковое сопровождение событий полета дрона.
Техническим результатом является: повышение безопасности использования, повышение срока службы дрона, снижение средней величины энергозатрат на полетную сессию, повышение удобства использования, обеспечение возможности повышения скорости полета дрона внутри полигона и расширение области применения.
Для достижения технического результата в системе для осуществления способа управления дроном, содержащей дрон, оборудование управления и полигон, полигон определен координатами боковых границ и установленной выше уровня поверхности, над которой находится пространство полигона нижней границей, дрон снабжен датчиком определения координат, соединенным каналом телеметрии с соответствующим входом центрального вычислительного устройства оборудования управления, выполненного с возможностью одновременного управления несколькими дронами, центральное вычислительное устройство снабжено средствами ввода данных и по меньшей мере, одним пультом управления пользователя, совокупности точек пространства внутри полигона, запрещенных для дрона, в том числе границы полигона, характеризуются как препятствия, которые имеют буферную зону, на границе которой команда управления дроном соответствует скорости сближения с соответствующим препятствием стремящейся к нулю.
Кроме того: - координаты боковых границ полигона определены относительно географических координат, а датчиками определения координат являются датчики системы глобального позиционирования;
- координаты боковых границ полигона определены относительно локальной системы координат, с использованием по меньшей мере, трех разнесенных в пространстве маяков, а датчик определения координат выполнен с возможностью определения координат в локальной системе координат по сигналам указанных маяков;
- препятствиями помимо границ полигона являются также находящиеся внутри полигона объекты;
- препятствиями помимо границ полигона являются также находящиеся внутри полигона объекты, в том числе другие дроны;
- дрон выполнен по схеме мультикоптера, в котором двигатели и несущие винты установлены между плоскостями, ограниченными верхней и нижней пластинами, образующими жесткую раму, между которыми закреплена прокладка из упругого материала, выступающая вдоль внешней торцевой части дрона, образуя внешний бампер;
- система снабжена средствами звукового и/или цветового сопровождения событий полета дрона.
Краткое описание чертежей
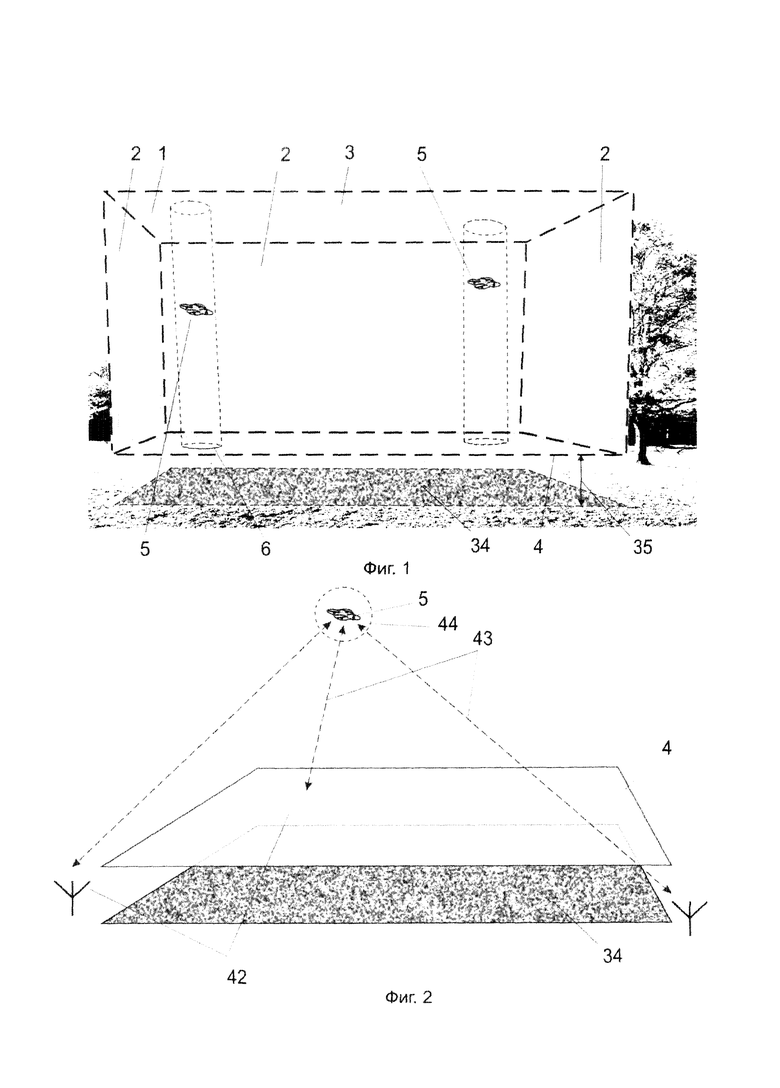
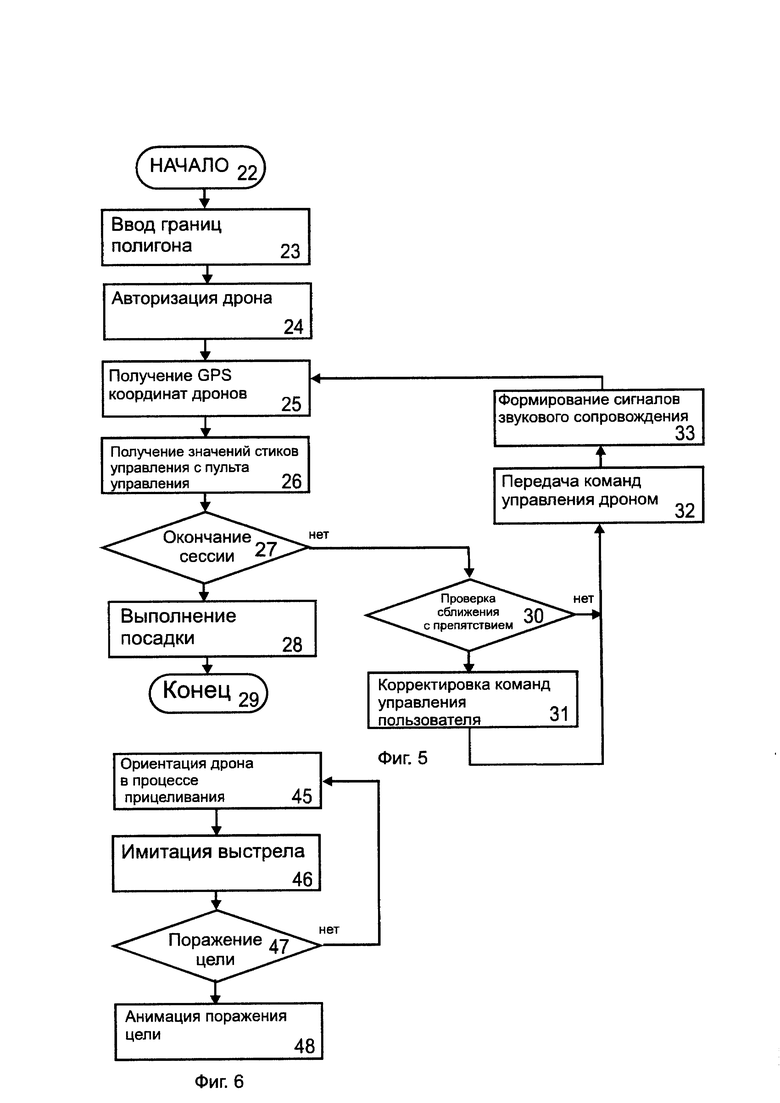
Способ управления дроном поясняется с помощью чертежей, где на Фиг 1 показаны управляемые дроны, находящиеся в пространстве полигона, ограниченного заданными границами, на Фиг. 2 - схематично расположение маяков и дрона относительно пространства полигона, на Фиг. 3 - пример функциональной схемы управления дроном, на Фиг. 4 - пример структурной схемы системы для осуществления способа управления дроном в варианте с использованием глобальной системы позиционирования, на Фиг. 5 - пример алгоритма управления процессором центрального вычислительного устройства системы для осуществления способа управления дроном, на Фиг. 6 - пример алгоритма управления процессором центрального вычислительного устройства системы для имитации выстрела с использованием дрона, на Фиг. 7 - пример варианта исполнения способа управления дроном, предполагающего имитацию выстрелов по мишеням, на Фиг 8 - пример конструкции дрона системы для осуществления способа управления дроном.
Описание и чертежи содержат конкретные варианты осуществления технического решения, которые являются лишь иллюстративными, и не ограничивают осуществление решения, которое может быть реализовано иными вариантами в рамках формулы. На чертежах сделаны следующие обозначения.
1 - полигон, 2 - боковые границы полигона, 3, 4 верхняя и нижняя границы полигона соответственно, 5 - дрон, 6 - буферная зона дрона, имеющая форму цилиндра из точек географических координат, 7 - формирование команд оператора с помощью пульта оператора, 8 - центральное вычислительное устройство; 9 - передача данных измерения бортовых датчиков по телеметрическим каналам, 10 - индивидуальный пульт управления пользователя, 11 - ввод команд управления пользователей, 12 - пульт (средства ввода) оператора, обслуживающего систему, 13 - загрузка данных верхней и нижней границ, 14 - ввод географических координат боковых границ полигона, 15 - передача команд на борт по радиоканалу, 16 - внешний бампер, 17 - приборы подсветки дрона, 18 - несущий винт,. 19 - верхняя пластина корпуса, 20 - отсек для бортового оборудования и батареи, 21 - бортовая видеокамера, 22 - начало сессии, 23 - ввод географических координат границ полигона, верхней и нижней границ, а также ввод географических координат препятствий внутри полигона, 24 - авторизация дрона, 25 - получение координат дронов от систем глобально позиционирования, а также данных от датчиков по каналам телеметрии, 26 - получение значений команд управления с индивидуального пульта управления пользователя, 27 - проверка условия времени окончания сессии, 28 - выполнение посадки, 29 - окончание сессии, 30 - проверка условия сближения с границами полигона или препятствием, 31 - корректировка команд пользователя, 32 - передача команд управления дрона на борт по радиоканалу, 33 - формирование сигналов звукового и светового сопровождения событий полетной сессии, 34 - уровень поверхности под пространством полигона, 35 - высота нижней границы полигона, 36 - спутники системы глобального позиционирования, 37 - бортовые датчики системы телеметрии, 38 - препятствие внутри полигона, 39 - монитор, 40 - оборудование звукового сопровождения, 41 - оборудование управления, 42 - маяк, 43 - расстояние от маяка до дрона, 44 - буферная зона дрона в форме сферы, 45 - ориентация дрона или имитатора оружия для осуществления прицеливания, 46 - имитация выстрела, 47 - анализ данных о положении дрона в момент выстрела, и о координатах других дронов для определения факта поражения цели, 48 - анимация, сопровождающая поражение цели, 49 - имитатор оружия, линия прицеливания, 50 - система декартовых координат полигона с осями X, Y, Z, 51 - система координат дрона с привязкой к его пространственной ориентации, 52 - система координат имитатора оружия с привязкой к его пространственной ориентации, 53 - дрон, выполняющий роль цели.
Способ управления дроном характеризуется тем, что предварительно определяют границы полигона, которые задают виртуально, в виде координат, определяющих боковые границы полигона, и нижнюю границу полигона в виде минимальной высоты полета, а также верхнюю границу полигона в виде максимальной высоты полета.
Нижняя граница полигона не совпадает с уровнем поверхности находящейся под полигоном, и находится выше ее уровня, на высоте величину которой выбирают из условия возможности снижения скорости падения или возврата в пространство полигона дрона, попавшего в силу нештатной ситуации ниже нижней границы полигона.
При этом в варианте с использованием глобальной системы позиционирования боковые границы задают посредством ввода соответствующих географических координат, а в варианте с использованием разнесенных между собой маяков локальной системы позиционирования боковые границы полигона, а также верхние и нижние границы задают посредством ввода соответствующих координат локальной системы, формируемой с помощью указанных маяков. Маяками могут являться, по меньшей мере три радиомаяка, либо ультразвуковых излучателя, сигналы от которых воспринимаются бортовым датчиком, так, что при этом обеспечивается однозначное определение положения дрона относительно указанных маяков.
Границы полигона, а также стационарные объекты, находящиеся внутри полигона, представляют собой совокупность точек пространства, образующих препятствия, которые задают путем ввода данных с помощью пульта оператора и определяют их как препятствия с запретом приближения к ним ближе чем на заранее определенное расстояние буферной зоны. Заранее заданные подвижные объекты, в том числе другие дроны, находящиеся внутри полигона также считают препятствиями для дрона с запретом приближения к ним ближе границы, определяющей начало их буферной зоны, а их положение определяют с помощью их бортовых датчиков определения координат.
Полет дрона во время полетной сессии разрешают только внутри пространства полигона, так, что буферные зоны препятствий, в том числе границ полигона, находятся внутри этого пространства полигона. Вылет дрона за границы полигона может быть разрешен лишь на этапе автоматического приземления дрона.
После старта дрона управляют его полетом с помощью команд, сформированных пользователем и направляемых через центральное вычислительное устройство по радиоканалу на исполнительные устройства дрона.
С помощью бортовых датчиков измеряют координаты дрона, которые в варианте использования глобальной системы позиционирования получают посредством от датчиков GPS/ГЛОНАСС и высотомера, определяющего высоту полета. На борту дрона задействован также акселерометр, обеспечивающий измерение направления и величины ускорения дрона.
В варианте использования с локальной системой позиционирования посредством разнесенных между собой маяков, координаты дрона в системе координат полигона определяют с помощью соответствующих бортовых датчиков на основе задержек, полученных бортовым приемником дрона сигналов от, по меньшей мере, трех разнесенных в пространстве маяков. При этом высоту полета определяют также на основе разницы задержек сигналов маяков, либо с помощью бортового высотомера.
Данные измерений передают по каналам телеметрии на вход центрального вычислительного устройства, в котором вычисляют вектор скорости дрона, его положение относительно препятствий и время сближения с препятствием, находящемся на пути дрона.
Если время сближения с препятствием, а точнее с границей буферной зоны препятствия оказывается меньше порогового значения, то корректируют команду управления дроном, уменьшая скорость его сближения с препятствием, так, что по достижению буферной зоны скорость его сближения становится минимальной и стремится к нулю.
В качестве дрона могут быть использованы винтокрылые летательные аппараты, снабженные электрическими или иными двигателями - коптеры, а также скоростные летательные аппараты, использующие аэродинамическую силу планера с различными типами двигателей.
В процессе полета осуществляют световое и/или звуковое сопровождение событий полета дрона, а также цветовую подсветку дрона.
Система для осуществления управления дроном, содержит дрон, оборудование управления с центральным вычислительным устройством и полигон, границы которого установлены в виде координат в пространстве и включают боковые границы и нижнюю границу, которая находится выше уровня поверхности, над которой находится пространство полигона. При этом координаты боковых границ полигона определены относительно географических координат системы глобального позиционирования или относительно разнесенных в пространстве, по меньшей мере трех маяков, определяющих локальную систему координат полигона.
Полигон имеет также верхнюю границу полигона, которая задана в виде максимальной высоты полета.
Дрон снабжен датчиками определения географических координат GPS/ГЛОНАСС либо датчиками определения координат системы локального позиционирования в системе координат, образованной с помощью разнесенных в пространстве маяков. Датчики определения координат соединены посредством каналов телеметрии с соответствующим входом центрального вычислительного устройства оборудования управления, выполненного с возможностью одновременного управления несколькими дронами. Центральное вычислительное устройство снабжено средствами ввода данных и по меньшей мере, одним пультом управления пользователя.
Оборудование управления содержит средство передачи - передатчик команд управления по радиоканалу на борт дрона, подключенный к соответствующему выходу центрального вычислительного устройства, а дрон снабжен приемником сигналов команд управления.
Границы полигона, а также находящиеся внутри полигона объекты, в том числе другие дроны являются точками пространства, в которых нахождение дрона стремятся исключить, так как эти точки пространства признают запрещенными для дрона и приравнивают их к препятствиям. Эти препятствия характеризуются наличием буферной зоной, на границе которой команда управления дроном соответствует нулевой скорости сближения с соответствующим препятствием. В качестве препятствий внутри полигона могут быть, например, поставленные столбы, координаты которых предварительно введены в память центрального вычислительного устройства оборудования управления либо подвижные шары и иные объекты, снабженные датчиком определения координат и средством радиосвязи с центральным вычислительным устройством. Столбы и прочие неподвижные препятствия используются как искусственные препятствия для повышения зрелищности аттракциона или с целью тренировки мастерства пилотов.
Дрон выполнен по схеме мультикоптера, в котором двигатели и несущие винты установлены между плоскостями, ограниченными верхней и нижней пластинами, образующими жесткую раму, между которыми закреплена прокладка из упругого материала, выступающая вдоль внешней торцевой части дрона, образуя внешний бампер.
В варианте использования глобальной системы позиционирования датчик определения высоты включает высотомер, который выполнен на основе лазерного, ультразвукового или барометрического дальномера.
Центральное вычислительное устройство представляет собой компьютер, процессор которого работает под управлением программы, реализующей управление полетом дрона с учетом команд управления пользователя, и обеспечивает процесс полета дрона, хранение данных границ полигона, формирование и корректировку сигналов управления для передачи их по радиоканалу, получение и анализ координат дрона, корректировку вектора скорости, а также формирование сигналов звукового сопровождения событий полетной сессии.
Дрон снабжен бортовой видеокамерой, а пульт управления содержит средства отображения сигналов с бортовой видеокамеры, такие как монитор или очки с монитором.
Система снабжена средствами звукового сопровождения событий полетной сессии.
Величину буферной зоны определяют с учетом максимальной скорости дрона, силы порывов ветра, воздействующих на дрон и пр.
Осуществление изобретений
Способ управления дроном, осуществляется следующим образом.
Для подготовки запуска дрона осуществляют предварительные действия, заключающиеся в том, что на карте местности определяют границы полигона в виде географических координат, которые вводят, используя средства ввода данных опера гора в память центрального вычислительного устройства в составе оборудования управления. Устанавливают минимальную высоту полета и максимальную высоту, которые также с помощью средств ввода данных - пульта оператора загружают в память центрального вычислительного устройства.
Виртуальность границ полигона расширяет область применения способа управления дроном, который может быть использован как на открытых участках местности, исключающих наличие физического ограждения, так и в помещениях, ограничивающих пространство полигона стенами и потолком.
Помимо границ полигона вводят также географические координаты стационарных объектов, находящихся внутри пространства полигона и способные являться препятствиями для полета дрона. Такими объектами могут быть как естественные препятствия - столбы, деревья, так и специально установленные препятствия, такие как надувные башни и пр.
Препятствиями являются также перемещающиеся на полигоне объекты, например, дроны других пользователей или, например, лица обслуживающего персонала, работающие внутри полигона и снабженные датчиком определения координат, которыми в варианте использования глобальной системы позиционирования являются датчики GPS/TJIOHACC. Неподвижные препятствия также могут быть снабжены датчиками определения координат, данные от которых постоянно обновляют и направляют в центральное вычислительное устройство.
Для границ полигона и других препятствий внутри полигона вводят величину буферной зоны, выбранную исходя из возможной максимальной скорости дрона, размеров полигона и пр., равную, например, 1 м, Пересечение границы буферной зоны стремятся не допускать, т.е. признают запрещенным нахождение дрона внутри буферной зоны, а тем более за границей препятствия, в связи с чем при попадании дрона за границу буферной зоны формируют коианду управления, заставляющую дрон покинуть запрещенное пространство.
В общем случае буферная зона, т.е. фигура образуемая границами буферной зоны, отдельного или точечного препятствия внутри полигона по форме представляет собой сферу или цилиндр, окружающий препятствие. Граница буферной зоны препятствия в этом случае это множество точек в пространстве полигона, удаленных от соответствующего препятствия на величину буферной зоны. Однако в варианте исполнения, не предполагающем для формирования буферной зоны, учет высоты точечного препятствия буферная зона представляет собой цилиндр географических координат, ограниченный нижней и верхней границами полигона и радиусом величины буферной зоны. Границей точечного препятствия в этом случае, являются географические координаты, удаленные от координаты препятствия на величину буферной зоны.
Буферная зона границ полигона повторяет форму соответствующей границы и находится внутри пространства полигона.
В варианте исполнения, предусматривающем использование локальной системы позиционирования с помощью, по меньшей мере, трех разнесенных в пространстве маяков, границы полигона определяют относительно локальной системы координат указанных маяков и вводят в память центрального вычислительного устройства в виде локальных координат границ полигона. Координаты других препятствий также являются локальными, сформированными в локальной системе координат указанных маяков.
Определение координат дрона или иного подвижного объекта в локальной системе осуществляют путем измерения относительных задержек, принимаемых бортовым приемником сигналов, излучаемых разнесенными в пространстве маяками. При этом в локальной системе могут быть использованы либо радиомаяки, либо ультразвуковые излучатели.
Буферная зона точечного препятствия в варианте с использованием локальной системы позиционирования представляет собой сферу или цилиндр, окружающий точечное препятствие, диаметр и высота цилиндра равна удвоенному значению величины буферной зоны.
Подготавливают и устанавливают на исходные позиции дроны.
С началом полетной сессии пользователь с помощью индивидуального пульта управления формирует команды старта и последующего управления соответствующим дроном. При этом полетная сессия может начинаться одновременно с дронами других пользователей, либо независимо от них.
Время начала сессии определяет оператор с помощью пульта оператора, он же осуществляет сопровождение сессии включая формирование команд на преждевременное ее завершение.
Данные от датчиков GPS/ГЛОНАСС вместе данными датчиков высоты и акселерометра по каналам телеметрии с частотой 100 Гц направляют на вход центрального вычислительного устройства.
В варианте с использованием локальной системы позиционирования по каналам телеметрии на вход центрального вычислительного устройства передают данные датчика определения координат в локальной системе координат, сформированной разнесенными в пространстве маяками.
Центральное вычислительное устройство по мере обновления данных вычисляет вектор скорости дрона, его положение относительно препятствий и время сближения дрона с находящимся на его пути препятствием.
Если оценка составляющей вектора скорости, направленной на сближение дрона с препятствием окажется превышающей пороговую величину, например, такую скорость, которая позволяет достигнуть препятствие менее чем за 1 секунду, то посредством центрального вычислительного устройства корректируют команду управления так, что составляющая вектора скорости, направленная к препятствию уменьшается, и остается в пределах допороговой величины времени достижения препятствия на всей траектории сближения с препятствием. Таким образом если пользователь направил дрон на препятствие с высокой скоростью сближения, то скорость сближения будет линейно уменьшаться по мере сближения дрона с препятствием и по достижению границы буферной зоной препятствия станет равной нулю.
Коррекция скорости сближения с препятствием позволяет подойти к препятствию с минимальной скоростью и предотвращает пересечение границы препятствия, вызываемое как действием команды пользователя, так и иными факторами, например, сносом дрона порывом ветра. Минимальная скорость у границы буферной зоны снижает вероятность попадания дрона внутрь буферной зоны и способствует предотвращению столкновения дрона с препятствием, а также способствует исключению факта выхода дрона за границы полигона, что обеспечивает безопасность использования для окружающих людей и техники.
Более того, человек, находящийся внутри полигона и снабженный датчиком определения координат воспринимается как препятствие имеющее буферную зону, запрещенную для пересечения дроном, что обеспечивает безопасность использования способа и удобство при обслуживании, не прерывая при этом полетную сессию.
Коррекция с помощью центрального вычислительного устройства скорости сближения с препятствием приводит к отмене у границы буферной зоны команды пользователя на сближение с препятствием и замене ее командой, исключающей дальнейшее сближение. При этом команда пользователя может быть заменена, например, командой остановки дальнейшего сближение или командой, направляющей дрон в противоположном от сближения направлении, имитирующей упругое отскакивая от столкновения с препятствием. После того, как пользователь изменит команду сближения с препятствием на команду, исключающую такое сближение, либо если дрон удалится от препятствия и скорость сближения с препятствием станет ниже порогового, центральное вычислительное устройство возвращает управление дроном пользователю в полном объеме.
Не материальность границ полигона совместно с возможностью исключения фактов их пересечения дроном, обеспечивает возможность создания больших по площади полигонов, не ограничивающих высокую скорость полета дрона и выполнение им сложных маневров. В качестве дронов могут быть использованы, в том числе планеры, без риска их потери от столкновения с границей полигона.
Любой другой дрон, находящийся внутри полигона воспринимается как препятствие со своей буферной зоной, что исключает также возможность взаимного столкновения дронов.
Исключение фактов столкновения с препятствием, в том числе с другим дроном обеспечивает исключение случаев падения от столкновения и разрушение дрона, что в свою очередь обеспечивает повышение длительности срока эксплуатации дрона и увеличение его межремонтного периода, что улучшает эксплуатационные характеристики системы для осуществления способа.
Устранение причин падения дронов от столкновения с препятствием исключает необходимость непредвиденных перерывов сессии, что повышает удобство реализации способа и снижает энергозатраты на полетную сессию.
При подлете дрона к буферной зоне нижней границы полигона команда пользователя на дальнейшее снижение также корректируется с помощью центрального вычислительного устройства, обеспечивая остановку снижения у границы буферной зоны. Как только пользователь изменит команду, направленную на дальнейшее снижение с чрезмерно высокой скоростью центральное вычислительное устройство, возвращает управление пользователю в вертикальном направлении.
Наличие пространства между нижней границей полигона и уровнем поверхности под пространством полигона позволяет возвратить вышедший за нижнюю границу полигона дрон, испытывающий помимо действия команды на снижени также действие земного притяжения и инерции, либо снизить скорость падения дрона до минимального приемлемого значения, исключающего удар дрона о землю. Чрезмерно быстрое снижение может случиться, например, из-за неправильных команд пользователя. Исключение фактов жесткой посадки дрона также способствует удлинению срока его службы.
Превышение высоты нижней границы величины роста человека обеспечивает безопасное использование способа даже при наличии людей на участке, над которым задано пространство полигона.
При приближении дрона к границе буферной зоны верхней границы также снижают скорость сближения до нуля. Команды пользователя на дальнейший набор высоты корректируют, заменяя их командой остановки набора высоты у границы буферной зоны. После того как пользователь изменит управление отменив дальнейший подъем дрона с чрезмерной скоростью, центральное вычислительное устройство возвращает пользователю управление в вертикальном направлении.
Возможность задавать величину верхней границы полигона позволяет исключить вылет дрона на неконтролируемую высоту полета, а также столкновение с высотными конструкциями в условиях использования на разных полигонах и также способствует удлинению срока службы дрона.
Алгоритмы коррекции скорости сближения с препятствием обеспечивают остановку дрона у начала буферной зоны, однако если в результате перебоя беспроводной связи или по причине сильного порыва ветра или по иным чрезвычайным причинам дрон окажется в буферной зоне границы полигона или даже снаружи полигона, формируют с помощью центрального вычислительного устройства команду возврата дрона в пространство полигона по кратчайшему пути, обеспечивая безопасность для людей, находящихся вне полигона.
Одним из вариантов использования способа управления дроном может быть предусмотрена имитация противостояния дронов в рамках развлекательного аттракциона или системы обучения пилотов. В этом варианте последовательность действий в рамках противостояния может быть охарактеризована как способ имитации охоты или тир и предусматривает прицеливание, осуществляемое с помощью бортовой видеокамеры, изображение с которой передают по радиоканалу на средства визуализации пользователя, такие как монитор или FPV очки. В рамках операции прицеливания осуществляют ориентацию дрона разворачивая его так, чтобы объект внутри полигона, предназначенный для поражения оказался на линии прицеливания. Данные об ориентации дрона получают с помощью бортового гиродатчика. Линия прицеливания соответствует направлению, которое определяет перекрестие, имеющееся на изображении с бортовой камеры и отображаемое на мониторе. Ориентацию дрона осуществляют с помощью команд пользователя, формируемых посредством пульта управления пользователя и передаваемых на борт дрона по радиоканалу. В момент имитации выстрела центральное вычислительное устройство, собирающее данные о координатах дрона, осуществляющего прицеливание, данные о других, участвующих в сессии объектах, в том числе других дронах, которые могут представлять собой мишени, вычисляет положение и пространственную ориентацию дрона и положение других объектов внутри полигона. Фиксируют момент времени имитации выстрела, осуществляемого с помощью пульта управления пользователя. Затем с помощью центрального вычислительного устройства вычисляют направление выстрела с учетом координат дрона, углов его тангажа и крена и определяют факт наличия цели на линии прицеливания в момент выстрела. В рамках анализа факторов, влияющих на определение успешности попадания в цель формируют подобие луча, распространяющегося от дрона по линии прицеливания, анализируют возможные пересечения сформированного луча с другими объектами на полигоне и выбирают ближайшую цель, оказавшуюся на линии луча в момент выстрела, если пересечение луча произошло с несколькими объектами.
Если цель в момент имитации выстрела располагалась на линии прицеливания, то решают, что цель поражена и имитируют поражение цели в виде звуковых, световых или иных эффектов.
Для создания эффекта реальности осуществляют полетную анимацию, в рамках которой дрон при выстреле кратковременно заваливается по углу тангажа, имитируя отдачу от выстрела, а цель при поражении испытывает крен и т.п. Наблюдение этих эффектов с бортовой видеокамеры способствует более глубокому погружению пользователя в исполняемую им роль.
Вариант использования может предусматривать также преждевременную посадку дрона, выступающего в роли пораженной цели.
Вариантом исполнения способа управления дроном может быть реатизация тира, предусматривающего сценарий противостояния находящегося на земле пользователя, оснащенного имитатором оружия с встроенными датчиком GPS/ГЛОНАСС, компасом и гиродатчиком, и дрона, выполняющего полет под управлением другого пользователя или по заданному алгоритму. В этом случае имитацию выстрела осуществляет пользователь с помощью имитатора оружия, а определение факта поражения дрона осуществляют с помощью центрального вычислительного устройства на основе данных измерения датчиков имитатора оружия и дрона аналогично описанному выше примеру.
Прицеливание пользователя может осуществляться с помощью установленной на имитаторе оружия прицельной оптики.
В варианте с использованием локальной системы позиционирования дрон и объекты прицеливания снабжены датчиками определения координат в локальной системе координат маяков и гиродатчиками, данные от которых по каналам телеметрии передают на вход центрального вычислительного устройства. Анализируют положение и ориентацию дрона и объектов прицеливания подобно описанному выше и принимают решение о факте успешного выстрела и поражении цели. В варианте, предусматривающем использование имитатора оружия с прицельной оптикой, имитатор оружия также выполнен с использованием датчика определения координат в локальной системе координат маяков и снабжен гиродатчиком.
Имитация выстрела и анализ попадания в цель исключает физическое воздействие на дрон, благодаря чему отсутствуют причины для повреждения дрона и его падения, что способствует повышению срока эксплуатации, используемых при реализации способа устройств.
Световое сопровождение включает вспышки подсветки дрона в момент выстрела и/или поражения. Звуковое сопровождение событий включает звуки выстрелов, взрывов и пр. Осуществление светового и звукового сопровождения событий полета дрона способствуют повышению безопасности использования в силу привлечения внимания в определенные критические моменты сессии. Цветовая подсветка способствует облегчению различения дронов пользователями и также улучшает безопасность использования, например, если известно, что один из дронов не полностью функционален.
По окончанию времени полетной сессии центральное вычислительное устройство включает алгоритм принудительной посадки дрона, в котором маршрут посадки формируется автоматически, исключает столкновения с препятствиями, в том числе с другими дронами, и обеспечивает мягкую посадку дрона на исходное место.
Способ управления дроном может быть реализован с использованием стандартных электронных компонентов, в том числе вычислительных средств на основе процессоров, и стандартных материалов с применением стандартных комплектующих.
Таким образом, способ управления дроном обеспечивает высокую безопасность использования, характеризуется повышением срока службы дрона благодаря исключению возможности столкновения дрона со стенками полигона и с объектами внутри полигона, в том числе с другими дронами, минимальными энергозатратами на полетную сессию, более удобен в использовании, а также обеспечивает возможность повышения скорости полета дрона внутри полигона и имеет более широкую область применения.
Система для осуществления управления дроном работает следующим образом.
Перед началом использования системы задают и вводят границы полигона, в пределах которого предполагается использовать дрон, а также координаты неподвижных препятствий.
В варианте использования глобальной системы позиционирования определяют географические координаты боковых границ, ограничивающих полетное пространство, и вводят их в память центрального вычислительного устройства оборудования управления. Задают нижнюю и верхнюю границы полигона, так же путем ввода через средства ввода значений высоты в память оборудования управления. Предпочтительное значение нижней границы составляет 2 м, а верхней - 10 м.
В варианте использования локальной системы позиционирования координаты границ определяют в локальной системе координат, сформированной с помощью разнесенных в пространстве маяков и также вводят их в память центрального вычислительного устройства.
Виртуальность границ полигона расширяет область применения системы для осуществления способа управления дроном, которая может использоваться как на открытых участках местности, исключающих наличие физического ограждения, так и в помещениях, ограничивающих пространство полигона стенами и потолком.
Устанавливают в дрон с электрическими силовыми двигателями заряженные батареи и устанавливают его на исходную позицию, предпочтительно, внутри географических координат полигона, на те места в которые будет осуществляться их посадка.
С началом полетной сессии с помощью пульта управления пользователя запускают дрон.
Вариантом исполнения системы управления дроном может быть предусмотрено, что пользователь осуществляет управление дроном. наблюдая за его перемещением непосредственно в полетном пространстве, например, из помещения через защитное стекло.
В другом варианте исполнения наблюдение за дроном осуществляют с помощью очков со встроенным монитором - видео-очков. На видео-очки выводится изображение, получаемое с бортовой видеокамеры дрона. На видеоряд может быть наложены линии прицеливания для облегчения наведения на цель при осуществлении вариантов с имитацией выстрелов.
Еще один вариант исполнения изобретения предполагает наблюдение пользователем за дроном либо непосредственно, либо через монитор, а осуществление прицеливания с помощью монитора.
Принудительная корректировка команд управления центральным вычислительным устройством направлена на исключение столкновений с препятствиями и касается изменения лишь той составляющей команды пользователя, которая направлена на сближение с препятствием. Остальные составляющие команды пользователя продолжают исполняться.
Благодаря наличию буферной зоны и ограничению скорости на границе буферной зоны, в любой момент времени дрон находится на расстоянии не ближе величины буферной зоны от препятствия, такого как граница полигона, неподвижный и подвижный объект внутри полигона, в том числе от таких препятствий как другие дроны, что исключает возможность физического столкновения с препятствиями из-за действий пользователя. Исключение фактов столкновения дрона с препятствием обеспечивает безопасность и повышение срока эксплуатации дрона.
Нематериальность границ полигона совместно с возможностью исключения вылета за границы позволяет создавать большие пространства полигона, что в свою очередь позволяет использовать дроны внутри полигона с высокой скоростью полета.
Человек, снабженный датчиком определения координат, соединенный каналом телеметрии со входом центрального вычислительного устройства, может находиться и перемещаться в границах полигона безопасно, не рискуя получить травму от удара дроном, что исключает необходимость прерывания сессии при необходимости проведения работ внутри полигона, что способствует снижению энергозатрат на полетную сессию и делает обслуживание удобным. Более того, если высота нижней границы превышает рост человека, то это создает условия для безопасного нахождения человека на территории полигона даже без каких-либо специальных мер.
Наличие нижней границы игрового пространства исключает возможность удара дрона о землю при маневрах, предполагающих резкое снижение, а определение нижней границы выше уровня поверхности земли под полигоном, обеспечивает дополнительный участок для погашения скорости даже в том случае, если из-за высокой скорости снижения инерция и сила притяжения земли заставят дрон выйти за нижнюю границу.
Наличие верхней границы полигона обусловлено необходимостью соблюдения мер безопасности при наличии воздушных судов над полигоном либо наличием поблизости высотных конструкций, например, ЛЭП.
Алгоритм управления процессором центрального вычислительного устройства рассмотрен на примере варианта с использованием глобальной системы позиционирования и включает следующие шаги.
В начале сессии 22 вводят или подтверждают необходимые константы, такие как величина буферной зоны, величина ограничения времени сближения с препятствием и пр. Затем вводят 23 или подтверждают географические координаты границ полигона, нижнюю и верхнюю его границы, а также вводят или подтверждают географические координаты неподвижных препятствий внутри полигона. Осуществляют авторизацию 24 дрона, необходимую для выполнения полета. Определяют 25 положение дрона в рамках полигона с помощью данных бортовых датчиков, получаемых по каналам телеметрии.
Формируют по сигналам с пульта управления пользователя команды 26 старта дрона и дальнейшего управления.
В течении сессии осуществляют проверку 27 истечения времени сессии. Если сессия не окончена, то осуществляют проверку 30 условия сближения с границами полигона или иным препятствием и времени сближения с препятствием. Если время сближения с препятствием ниже порога, то корректируют 31 команду управления уменьшая скорость сближения по мере приближения к препятствию.
Формируют 32 сигналы команд управления для передачи на борт дрона. В установленных случаях также формируют 33 сигнала звукового и светового сопровождения событий полетной сессии для воспроизведения их соответствующими средствами бортовой подсветки и/или оборудованием звукового сопровождения.
Если время сессии истекло выполняют 28 принудительную посадку, после чего заканчивают 29 сессию.
В случае использования нескольких дронов наличие датчиков географического положения, акселерометров, гиродатчиков и датчиков высоты, установленных на дронах позволяет с помощью центрального вычислительного устройства анализировать взаимное положение дронов для осуществления имитации выстрелов дроном в рамках реализации охоты за дронами или тира и объективно оценивать наличие или отсутствие факта попадания в цель. Вариант системы, реализующий тир может быть использован при наличии другого пользователя, управляющего соответствующим дроном или наличия у пользователя имитатора оружия, оснащенного датчиками позиционирования и ориентации в глобальной или локальной системе координат, например, гиродатчиком.
Определения факта поражения цели при имитации выстрелов не сопровождается каким-либо воздействием на дрон и исключает его повреждение.
Алгоритм управления процессором центрального вычислительного устройства при осуществлении имитации выстрела предусматривает следующие действия. Выполнение необходимого наклона дрона или ориентация имитатора оружия, для наведения линии прицеливания на цель 45. Имитация выстрела 46. Анализ 47 данных положения дрона или имитатора оружия и его ориентации в пространстве, данных координат других дронов в момент имитации выстрела в целях определения располагалась ли цель на линии прицеливания в момент выстрела. Также определяется ближайшая цель, если на линии прицеливания в момент имитации выстрела находились несколько дронов. Если цель в момент выстрела находилась на линии прицеливания, то принимают решение о факте поражения цели и осуществляют анимацию, сопровождающую поражение цели 48. В случае выявления промаха переходят к новому прицеливанию.
В дроне, используемом в системе для осуществления способа управления дроном несущие винты и двигатели расположены между плоскостями верхней и нижней пластин, что исключает нанесение травм или повреждений вращающимися винтами дрона случайно оказавшегося рядом с человеком. Такая конструкция способствует повышению безопасности использования системы, а также способствует лучшей сохранности вращающихся частей конструкции дрона при случайном столкновении или падении.
Выполнение конструкции дрона с внешним бампером из упругого материала также способствует повышению безопасности использования при сбоях системы, повлекших столкновение с препятствием или человеком и способствует увеличению срока эксплуатации дрона.
Плоская форма дрона, характеризующаяся отсутствием выступающих за плоскости корпуса деталей, улудшает аэродинамику дрона, и позволяет совместно с возможностью увеличения пространства полигона, благодаря исключению его физических границ, обеспечить возможность повышения максимальной скорости дрона.
Меньшая парусность благодаря отсутствию выступающих деталей снижает угрозу неконтролируемого сноса дрона порывом ветра, что совместно с наличием буферной зоны, обеспечивает снижение вероятность столкновения с препятствием и вызванное этим повреждение дрона.
Кроме того, наличие буферной зоны препятствий позволяет использовать более инерционные, безопасные, снабженные бампером дроны, и в тоже время оснащенные маломощными двигателями, что позволяет снизить энергоемкость сессии.
Система для реализации способа управления дроном может быть реализован с использованием стандартных электронных компонентов, в том числе вычислительных средств на основе процессоров, и стандартных материалов с применением стандартных комплектующих.
Таким образом, система для реализации способа управления дроном обеспечивает высокую безопасность использования, характеризуется повышением срока службы дрона благодаря исключению возможности столкновения дрона со стенками полигона и с объектами внутри полигона, в том числе с другими дронами, минимальными энергозатратами на полетную сессию, более удобна в использовании, а также обеспечивает возможность повышения скорости полета дрона внутри полигона и имеет более широкую область применения.
| название | год | авторы | номер документа |
|---|---|---|---|
| АЭРОМОБИЛЬНЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ВЕРТОЛЕТНОГО ТИПА | 2022 |
|
RU2792314C1 |
| Интеллектуальная система автоматического дистанционного мониторинга состояния и безопасности высоковольтных ЛЭП с применением беспилотных летательных аппаратов | 2024 |
|
RU2829914C1 |
| БОРТОВАЯ ИНТЕГРИРОВАННАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА И КОГНИТИВНЫЙ ФОРМАТ ПРЕДСТАВЛЕНИЯ ПОЛЕТНОЙ ИНФОРМАЦИИ НА ЭТАПЕ "ВЗЛЕТ" МНОГОДВИГАТЕЛЬНОГО ВОЗДУШНОГО СУДНА | 2013 |
|
RU2550887C2 |
| Модуль навигационной коммуникации для летательных аппаратов | 2024 |
|
RU2832846C1 |
| МУЛЬТИКОПТЕР | 2018 |
|
RU2685107C1 |
| СПОСОБ УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ | 2003 |
|
RU2236707C1 |
| БПЛА-перехватчик (варианты) | 2024 |
|
RU2825677C1 |
| Ракета с пространственным ограничением траектории полета и способ ее самоликвидации | 2019 |
|
RU2724152C1 |
| Интеллектуальная система автоматического дистанционного мониторинга состояния ЛЭП | 2022 |
|
RU2789896C1 |
| СПОСОБ КОМБИНИРОВАННОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2586399C2 |


Изобретения относятся к аттракционам и могут быть использованы для развлечений или для обучения управлению радиоуправляемыми летательными аппаратами. Техническим результатом является: повышение безопасности использования, повышение срока службы дрона, снижение средней величины энергозатрат на полетную сессию, повышение удобства использования, обеспечение возможности повышения скорости полета дрона внутри полигона и расширение области применения. Способ управления дроном характеризуется формированием с помощью пульта пользователя команд управления дроном в пространстве полигона, при этом определяют препятствия, в том числе боковые и нижнюю границы полигона, как совокупность точек пространства, к которым запрещают приближение дрона на расстояние ближе установленной заранее величины буферной зоны, в процессе полета дрона получают с помощью бортовых датчиков данные о положении дрона в пространстве, передают полученные данные посредством каналов беспроводной связи на центральное вычислительное устройство, с помощью которого вычисляют вектор скорости дрона и время сближения с препятствием, корректируют команду управления дроном, уменьшая скорость его сближения с препятствием, так, чтобы по мере достижения границы буферной зоны препятствия скорость сближения дрона с препятствием стремилась к нулю. 2 н. и 14 з.п. ф-лы, 8 ил.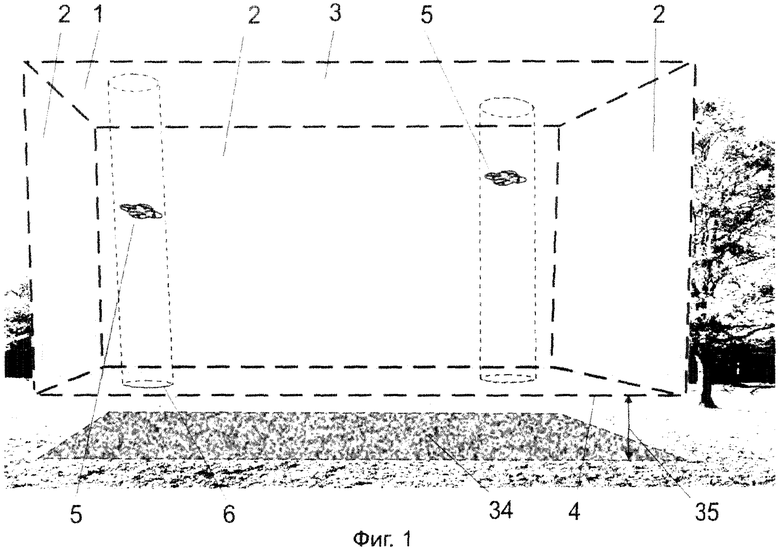
1. Способ управления дроном, характеризующийся формированием с помощью пульта пользователя команд управления дроном в пространстве полигона, отличающийся тем, что определяют препятствия, в том числе боковые и нижнюю границы полигона, как совокупность точек пространства, к которым запрещают приближение дрона на расстояние ближе установленной заранее величины буферной зоны, в процессе полета дрона получают с помощью бортовых датчиков данные о положении дрона в пространстве, передают полученные данные посредством каналов беспроводной связи на центральное вычислительное устройство, с помощью которого вычисляют вектор скорости дрона и время сближения с препятствием, корректируют команду управления дроном, уменьшая скорость его сближения с препятствием, так, чтобы по мере достижения границы буферной зоны препятствия скорость сближения дрона с препятствием стремилась к нулю.
2. Способ по п. 1, отличающийся тем, что нижнюю границу полигона задают выше уровня поверхности, находящейся под пространством полигона.
3. Способ по п. 1, отличающийся тем, что препятствием является также верхняя граница полигона, ограничивающая максимальную высоту полета дрона.
4. Способ по п. 1, отличающийся тем, что боковые границы полигона определяют относительно географических координат с использованием систем глобального позиционирования.
5. Способ по п. 1, отличающийся тем, что боковые границы полигона определяют относительно локальной системы координат, разнесенных в пространстве, по меньшей мере, трех маяков, при этом координаты дрона определяют на основе взаимных задержек сигналов указанных маяков, полученных соответствующим бортовым датчиком.
6. Способ по п. 1, отличающийся тем, что препятствиями являются также находящиеся внутри полигона объекты.
7. Способ по п. 1, отличающийся тем, что препятствиями являются также находящиеся внутри полигона объекты, в том числе другие дроны.
8. Способ по п. 1, отличающийся тем, что корректируют команду управления дроном, уменьшая скорость его сближения с препятствием так, чтобы время сближения с границей его буферной зоны оставалось не менее заранее установленной величины.
9. Способ по п. 1, отличающийся тем, что осуществляют световое и/или звуковое сопровождение событий полета дрона.
10. Система для осуществления способа управления дроном, содержащая дрон, оборудование управления и полигон, отличающаяся тем, что полигон определен координатами боковых границ и установленной выше уровня поверхности, над которой находится пространство полигона нижней границей, дрон снабжен датчиком определения координат, соединенным каналом телеметрии с соответствующим входом центрального вычислительного устройства оборудования управления, выполненного с возможностью одновременного управления несколькими дронами, центральное вычислительное устройство снабжено средствами ввода данных и, по меньшей мере, одним пультом управления пользователя, совокупности точек пространства внутри полигона, запрещенных для дрона, в том числе границы полигона, характеризуются как препятствия, которые имеют буферную зону, на границе которой команда управления дроном соответствует скорости сближения с соответствующим препятствием стремящейся к нулю.
11. Система по п. 10, отличающаяся тем, что координаты боковых границ полигона определены относительно географических координат, а датчиками определения координат являются датчики системы глобального позиционирования.
12. Система по п. 10, отличающаяся тем, что координаты боковых границ полигона определены относительно локальной системы координат с использованием, по меньшей мере, трех разнесенных в пространстве маяков, а датчик определения координат выполнен с возможностью определения координат в локальной системе координат по сигналам указанных маяков.
13. Система по п. 10, отличающаяся тем, что препятствиями помимо границ полигона являются также находящиеся внутри полигона объекты.
14. Система по п. 10, отличающаяся тем, что препятствиями помимо границ полигона являются также находящиеся внутри полигона объекты, в том числе другие дроны.
15. Система по п. 10, отличающаяся тем, что дрон выполнен по схеме мультикоптера, в котором двигатели и несущие винты установлены между плоскостями, ограниченными верхней и нижней пластинами, образующими жесткую раму, между которыми закреплена прокладка из упругого материала, выступающая вдоль внешней торцевой части дрона, образуя внешний бампер.
16. Система по п. 10, отличающаяся тем, что система снабжена средствами звукового и/или цветового сопровождения событий полета дрона.
| US 2017173451 A1, 22.06.2017 | |||
| US 9605926 B1, 28.03.2017 | |||
| EP 3116780 B1, 28.02.2018 | |||
| US 2009284553 A1, 19.11.2009 | |||
| RU 2016133604 A, 19.02.2018. |

