Изобретение относится к цифровой обработке изображений, а именно, к способам распознавания плоских изображений объектов по их форме с извлечением признаков объектов на основе контурного анализа, с последующей обработкой извлеченных признаков на основе статистического анализа, и может быть использовано в системах технического зрения.
Аналогом является способ идентификации и классификации объектов (патент DE 19731111 В4, МПК G06K 9/62, опубликован 27.10.2005), в котором объект идентифицируется и классифицируется на основании предварительно задаваемых свойств из выходного сигнала, с помощью работающей по векторному принципу схемы. Данный способ базируется на применении решающих правил (индикаторов) в многомерном векторном пространстве, которые позволяют предварительно задать свойства фактического предмета, например летательного аппарата, который регистрируется как объект по меньшей мере одним настроенным на него физическим детектором, например радиолокационной станцией. Таким образом, индикатор является абстрактным понятием для предварительно задаваемой, важной для идентификации качественной и количественной информации. Каждому индикатору присваивается тенденция, которая соответствует базовой тождественности индикатора. Затем индикаторы отображаются как векторы в многомерном векторном пространстве.
Прототипом заявленного изобретения является способ идентификации и классификации объектов (патент RU 2541158 С2, МПК G06F 17/30, G06K 9/62, опубликован 10.02.2015), согласно которому при идентификации объектов регистрируют предмет, по меньшей мере одним из настроенных на него физических детекторов, по выходному сигналу, по меньшей мере одного детектора, определяют по меньшей мере один объект, для которого получают из выходного сигнала набор n различных физических признаков, далее объект классифицируют на основании предварительно задаваемых свойств при помощи классификатора, предварительно обученного по обучающей выборке, при этом исследуемый объект соотносят с одним из N предварительно заданных классов, N базовых классов в предварительно заданной последовательности упорядочивают в N-мерный вектор V, который соотносят с объектом, причем элементы v1…vN вектора V указывают на принадлежность объекта к соответствующему базовому классу и в зависимости от вектора V объект соотносят с производным классом, который сохранен в справочной базе данных и выбирается из нее, причем в случае принадлежности объекта к соответствующему базовому классу элементу v1…vN вектора присваивают двоичное значение "1", в противном случае присваивают двоичное значение "0".
Основным недостатком аналога и прототипа является недостаточно высокая точность классификации объектов. Это обусловлено тем, что в известных способах отсутствует фильтрация шумовых объектов, так как в них не производят оценку схожести классифицируемого объекта с каждым из производных классов.
Задачей заявленного изобретения является разработка способа идентификации и классификации объектов, в котором устранен недостаток аналога и прототипа.
Техническим результатом заявленного изобретения является повышение точности классификации объектов за счет обеспечения фильтрации шумовых объектов.
Технический результат достигается тем, что в способе идентификации и классификации объектов, согласно которому при идентификации объектов
регистрируют по меньшей мере один предмет, по меньшей мере одним из настроенных на него физических детекторов,
по выходному сигналу, по меньшей мере одного детектора, определяют по меньшей мере один объект, для которого получают из выходного сигнала набор n различных физических признаков,
далее исследуемый объект классифицируют на основании предварительно задаваемых свойств при помощи классификатора, предварительно обученного по обучающей выборке,
при этом исследуемый объект соотносят с одним из N предварительно заданных классов,
согласно настоящему изобретению,
указанный классификатор содержит (N+1) предварительно заданных классов,
при этом принадлежность исследуемого объекта к N предварительно заданным классам, для которых представлена обучающая выборка, определяют в указанном классификаторе посредством оценки схожести по их физическим признакам,
а принадлежность исследуемого объекта к (N+1)-ому предварительно заданному классу, для которого не может быть представлена обучающая выборка, определяют в указанном классификаторе посредством того, что исследуемый объект не принадлежит ни к одному из N предварительно заданных классов на основе оценки схожести по их физическим признакам.
Для выполнения оценки схожести по физическим признакам в указанном классификаторе по меньшей мере одного исследуемого объекта с каждым из N предварительно заданных классов, которые имеют обучающую выборку,
осуществляют построение границ для каждого из N предварительно заданных классов посредством анализа плотности и формы распределения обучающей выборки в n-мерном пространстве признаков, при этом
определяют выпуклую границу предварительно заданного класса, соединяя точки  ,
,  ,
,
где bi - i-ая точка выпуклой границы предварительно заданного класса;  - координаты точки bi в n-мерном пространстве признаков; F - количество точек, образующих выпуклую границу предварительно заданного класса;
- координаты точки bi в n-мерном пространстве признаков; F - количество точек, образующих выпуклую границу предварительно заданного класса;
далее определяют центральную точку С предварительно заданного класса  ,
,
где  - координаты точки С в n-мерном пространстве признаков;
- координаты точки С в n-мерном пространстве признаков;
разделяют область, занимаемую классом в n-мерном пространстве признаков на F секторов, соединяя центральную точку C с каждой точкой выпуклой границы предварительно заданного класса bi,
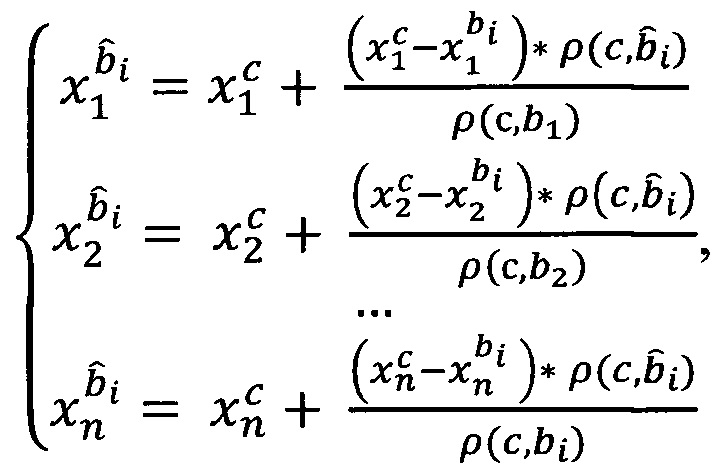
затем в каждом секторе точки выпуклой границы предварительно заданного класса bi преобразуют, исходя из плотности и формы распределения обучающей выборки предварительно заданного класса, в точки расширенной выпуклой границы предварительно заданного класса  ,
,
где  - i-ая точка расширенной выпуклой границы предварительно заданного класса;
- i-ая точка расширенной выпуклой границы предварительно заданного класса;  - координаты точки
- координаты точки  в n-мерном пространстве признаков; F - количество точек, образующих расширенную выпуклую границу предварительно заданного класса,
в n-мерном пространстве признаков; F - количество точек, образующих расширенную выпуклую границу предварительно заданного класса,
по формуле:
где ρ(С, bi) - евклидово расстояние от центральной точки С предварительно заданного класса до точки bi;
 - евклидово расстояние от центральной точки С предварительно заданного класса до точки
- евклидово расстояние от центральной точки С предварительно заданного класса до точки  ;
;
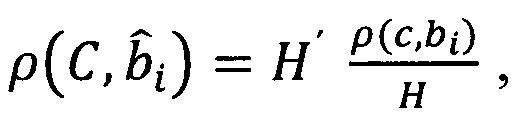
Евклидово расстояние от центральной точки С предварительно заданного класса до точки  расширенной выпуклой границы предварительно заданного класса определяют по формуле:
расширенной выпуклой границы предварительно заданного класса определяют по формуле:

где Н - сумма евклидовых расстояний от центральной точки С предварительно заданного класса до точки bi и соседней точки bi-1; Н' - сумма евклидовых расстояний от центральной точки С предварительно заданного класса до точки  и соседней точки
и соседней точки  , определяемая из плотности и формы распределения объектов предварительно заданного класса в секторе;
, определяемая из плотности и формы распределения объектов предварительно заданного класса в секторе;
сумму евклидовых расстояний Н от центральной точки С предварительно заданного класса до точки bi и соседней точки bi-1 определяют по формуле:

где ρ(С, bi) - евклидово расстояние от центральной точки С предварительно заданного класса до точки bi;
ρ(С, bi-1) - евклидово расстояние от центральной точки С предварительно заданного класса до точки bi-1;
сумму евклидовых расстояний Н' от центральной точки С предварительно заданного класса до точки  и соседней точки
и соседней точки  , определяемую из плотности и формы распределения объектов предварительно заданного класса в секторе, вычисляют по формуле:
, определяемую из плотности и формы распределения объектов предварительно заданного класса в секторе, вычисляют по формуле:

где Sk - количество точек в текущем секторе предварительно заданного класса;
k - количество секторов в предварительно заданном классе;
Т - общее количество точек в предварительно заданном классе;
hz - сумма евклидовых расстояний от точки внутри сектора tƒ,  до точки bi и точки bi-1;
до точки bi и точки bi-1;
сумму евклидовых расстояний hz от точки внутри сектора tƒ до точки bi и точки bi-1 определяют по формуле:

для каждой точки  , расширенной выпуклой границы предварительно заданного класса, входящей одновременно в два соседних сектора, вычисляют и усредняют между собой, соответственно, два комплекта координат,
, расширенной выпуклой границы предварительно заданного класса, входящей одновременно в два соседних сектора, вычисляют и усредняют между собой, соответственно, два комплекта координат,
определяют расширенную выпуклую границу предварительно заданного класса, соединяя точки  ,
,
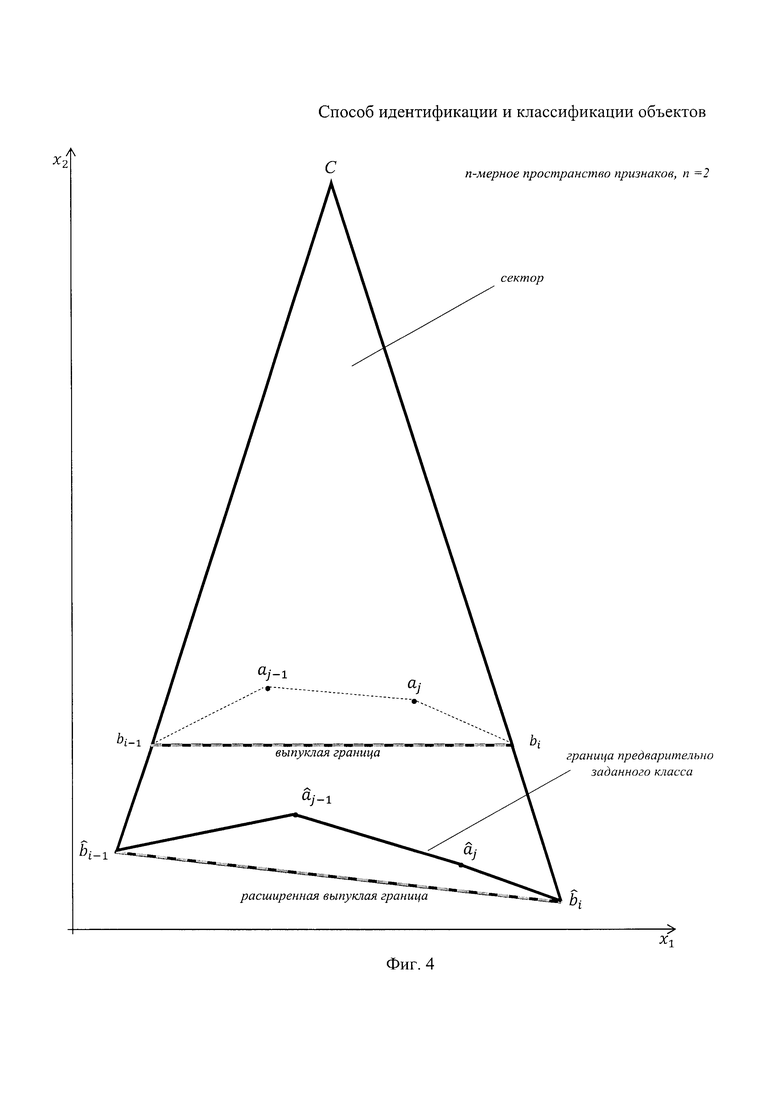
далее в каждом секторе в выпуклую границу предварительно заданного класса добавляют точки aj, которые находятся на минимальном расстоянии от двух соседних точек bi и bi-1 выпуклой границы предварительно заданного класса, причем их добавление в границу производят при условии, что другие точки не окажутся вне границы класса, при этом  ,
,  ,
,
где aj - j-ая точка, добавленная в выпуклую границу предварительно заданного класса;
 - координаты точки aj в n-мерном пространстве признаков;
- координаты точки aj в n-мерном пространстве признаков;
G - количество добавленных точек aj;
формируют вогнутую границу предварительно заданного класса, соединяя точки bi и точки aj,
затем добавленные в выпуклую границу предварительно заданного класса точки aj преобразуют в точки  ,
,  ,
,
где  - преобразованная j-ая точка, добавленная в выпуклую границу предварительно заданного класса;
- преобразованная j-ая точка, добавленная в выпуклую границу предварительно заданного класса;
 - координаты точки
- координаты точки  в n-мерном пространстве признаков;
в n-мерном пространстве признаков;
G - количество добавленных точек  ,
,
по формуле:

где ρ(bi, bi-1) - евклидово расстояние между соседними точками выпуклой границы bi и bi-1;
 - евклидово расстояние между соседними точками расширенной выпуклой границы
- евклидово расстояние между соседними точками расширенной выпуклой границы  и
и  ,
,
далее формируют окончательную границу предварительно заданного класса, соединяя точки  и точки
и точки  ,
,
затем осуществляют проверку попадания исследуемого объекта по его координатам в n-мерном пространстве признаков в каждую из областей, определяемых границами N предварительно заданных классов.
Сущность изобретения поясняется рисунками.
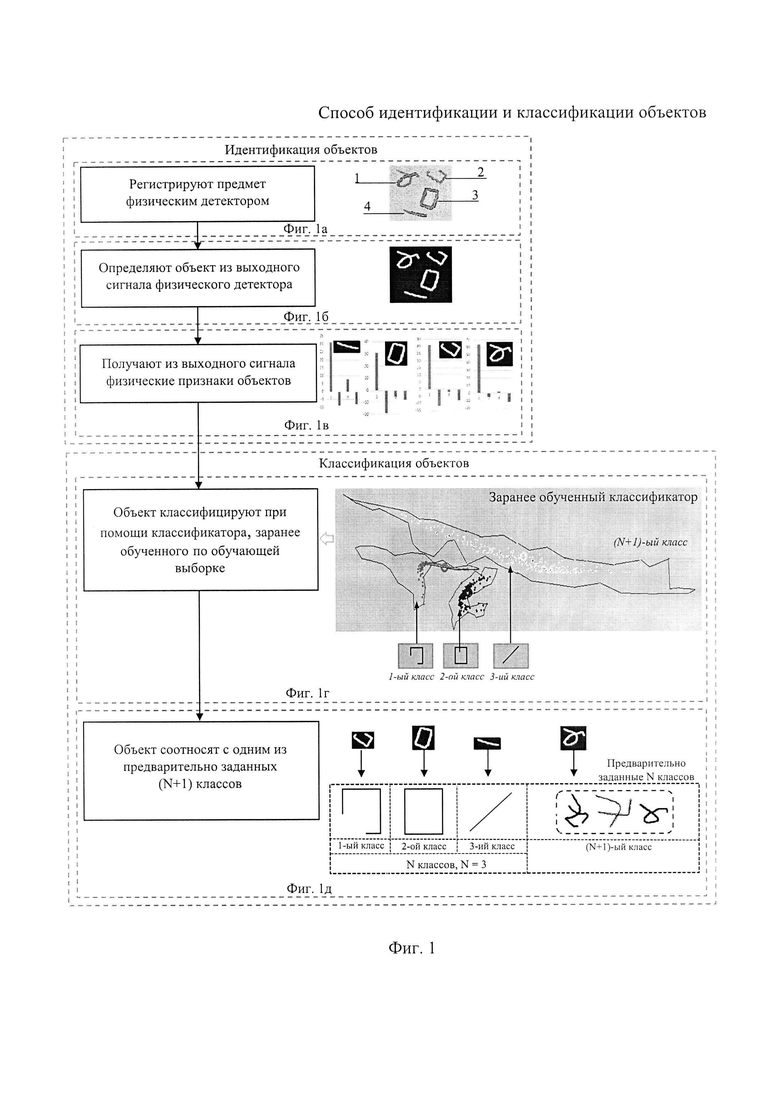
На фиг. 1 представлена схема, поясняющая основные этапы выполнения (фиг. 1а - фиг. 1д) предлагаемого способа идентификации и классификации объектов.
На фиг. 1а цифрами обозначены следующие элементы:
1 - элемент произвольной формы (шумовой объект),
2 - элемент «незавершенный прямоугольник»,
3 - элемент «прямоугольник»,
4 - элемент «отрезок».
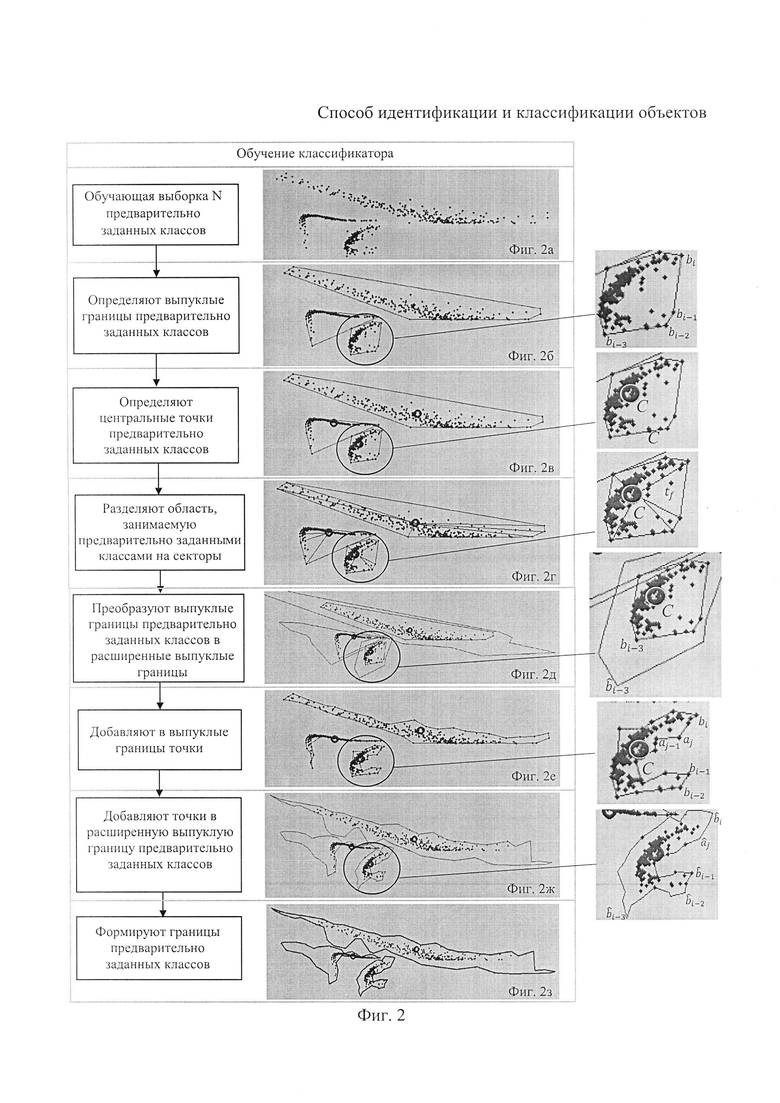
На фиг. 2 представлена схема, поясняющая основные этапы обучения классификатора для построения границ (фиг. 2а - фиг. 2з) каждого из N предварительно заданных классов в целях выполнения оценки схожести по физическим признакам исследуемого объекта с каждым из N предварительно заданных классов, которые имеют обучающую выборку.
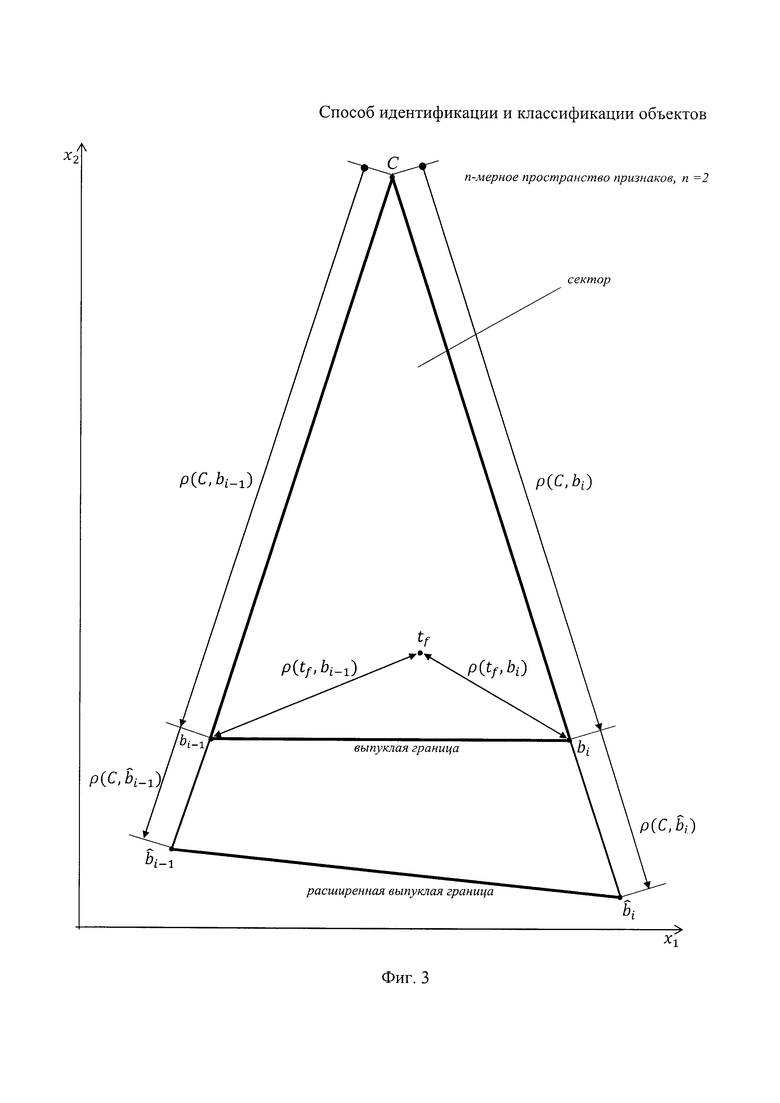
На фиг. 3 изображен сектор, в котором выполнено преобразование выпуклой границы предварительно заданного класса в расширенную выпуклую границу.
На фиг. 4 изображен сектор, в котором выполнено добавление точек в расширенную выпуклую границу предварительно заданного класса.
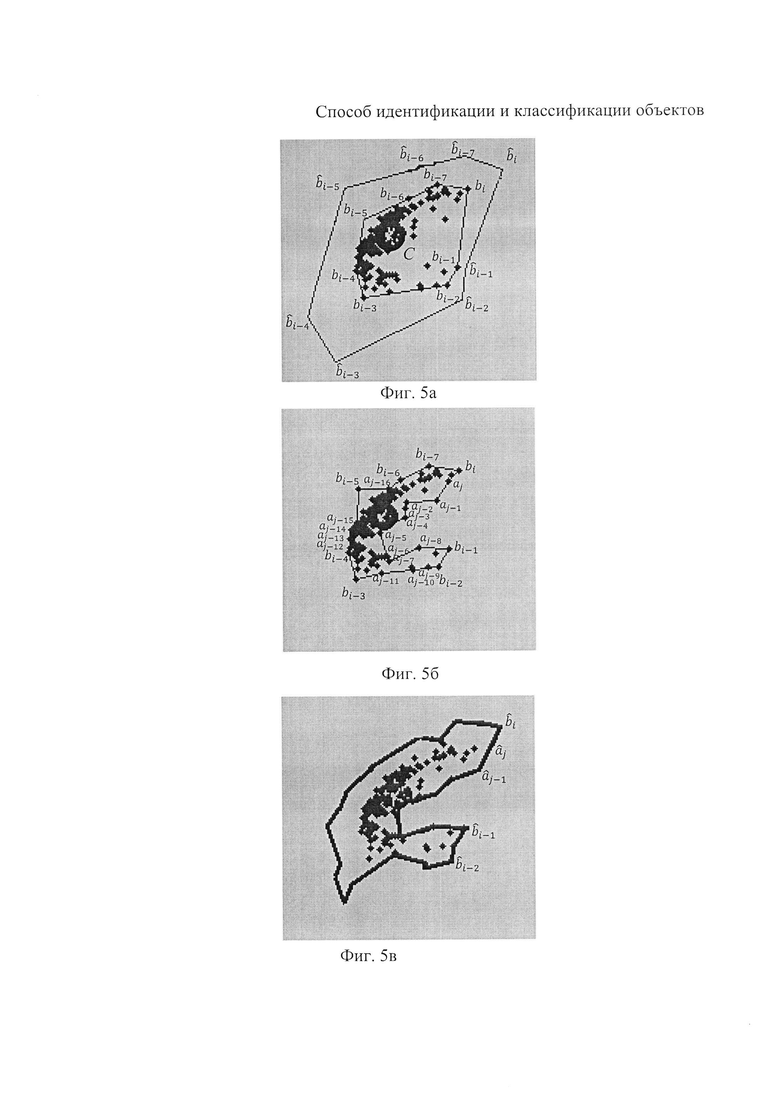
На фиг. 5 представлена схема, поясняющая основные этапы построения границы (фиг. 5а - фиг. 5в) предварительно заданного класса «прямоугольник».
Согласно предлагаемому способу идентификации и классификации объектов
при идентификации объектов регистрируют по меньшей мере один предмет, по меньшей мере одним из настроенных на него физических детекторов (фиг. 1а),
по выходному сигналу, по меньшей мере одного детектора, определяют по меньшей мере один объект (фиг. 1б), для которого получают из выходного сигнала набор n различных физических признаков - совокупность координат в n-мерном пространстве признаков (фиг. 1в),
далее исследуемый объект классифицируют на основании предварительно задаваемых свойств при помощи классификатора (фиг. 1г), предварительно обученного по обучающей выборке, при этом исследуемый объект соотносят с одним из N предварительно заданных классов.
Принцип действия предлагаемого способа идентификации и классификации объектов рассмотрим на следующем примере.
Допустим, необходимо идентифицировать и классифицировать исследуемый объект заранее неизвестной формы (фиг. 1а, элемент 2).
В процессе идентификации объекта регистрируют тепловизионным прибором (физическим детектором) предмет, являющийся источником ИК-излучения.
Получают изображение (фиг. 1а), представленное в цифровом виде в градациях серого цвета.
В рамках предлагаемого способа объект определяется как отклик на применение детектора границ Канни (Canny J.A Computational Approach for Edge Detection. IEEE Trans. Pattern Anal. Machine Intel., 1986, vol. 8, no. 6, pp. 679-698) к выходному сигналу физического (оптического) детектора или комбинации детекторов. Таким образом, на исходном изображении выделяют контур исследуемого объекта (фиг. 1б).
В данном примере конкретного выполнения исследуемый объект анализируют на несколько физических свойств. Объект определяется как односвязная область, которая имеет определенные физические свойства, которые однозначно отличают его от других объектов.
Далее для контура исследуемого объекта вычисляют значения четырех компонент преобразования Уолша над автокорреляционной функцией контура, результат которого выглядит как четыре столбца графика (фиг. 1в), отражающих значения соответствующих компонентов преобразования Уолша. Компоненты преобразования Уолша являются координатами исследуемого объекта в двумерном пространстве признаков, в котором реализован заранее обученный классификатор (фиг. 1г, фиг. 2).
Таким образом, указанными выше действиями осуществляют идентификацию исследуемого объекта.
Затем осуществляют процесс классификации исследуемого объекта.
Для выполнения процесса классификации исследуемого объекта заранее обучают классификатор, который позволяет определить принадлежность исследуемого объекта к одному из предварительно заданных классов. В качестве предварительно заданных классов могут выступать, например, класс «незавершенный прямоугольник» (1-ый класс), класс «прямоугольник» (2-ой класс), класс объектов формы «отрезок» (3-ий класс).
Заранее обученный классификатор представляет собой три замкнутые границы предварительно заданных классов (классы объектов типов «незавершенный прямоугольник», «прямоугольник», «отрезок») в двумерном пространстве признаков (фиг. 1г), внутри которых расположены объекты, принадлежащие данным классам, а снаружи - объекты 4-го (N+1) класса, отличающиеся от объектов трех обозначенных классов.
Обучение классификатора производят по обучающей выборке, которая представляет собой три компактные группы точек (фиг. 2а), причем для каждой точки известны ее физические признаки (координаты х1 и х2), а также, к какому из трех предварительно заданных классов она принадлежит.
В указанном классификаторе для выполнения оценки схожести по физическим признакам исследуемого объекта с каждым из трех предварительно заданных классов, которые имеют обучающую выборку, осуществляют построение границ для каждого из трех предварительно заданных классов посредством анализа плотности и формы распределения обучающей выборки в двумерном пространстве признаков.
В данном примере конкретного выполнения подробно рассмотрим формирование границы класса «незавершенный прямоугольник» (аналогично формируют границы классов «прямоугольник» и «отрезок»).
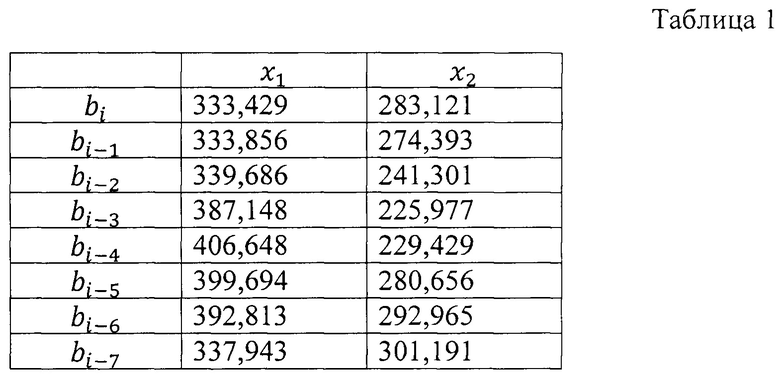
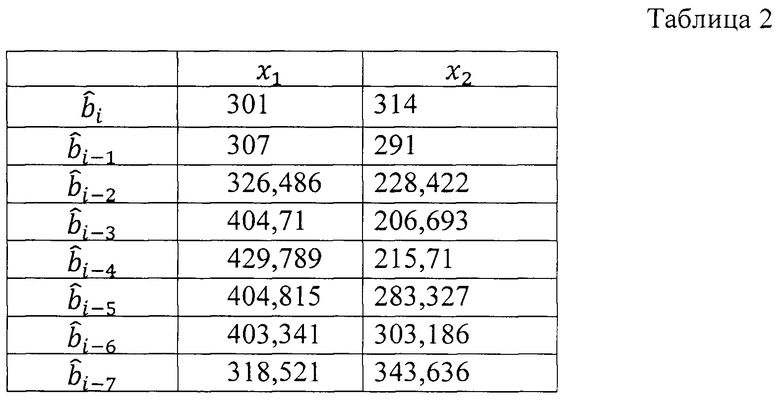
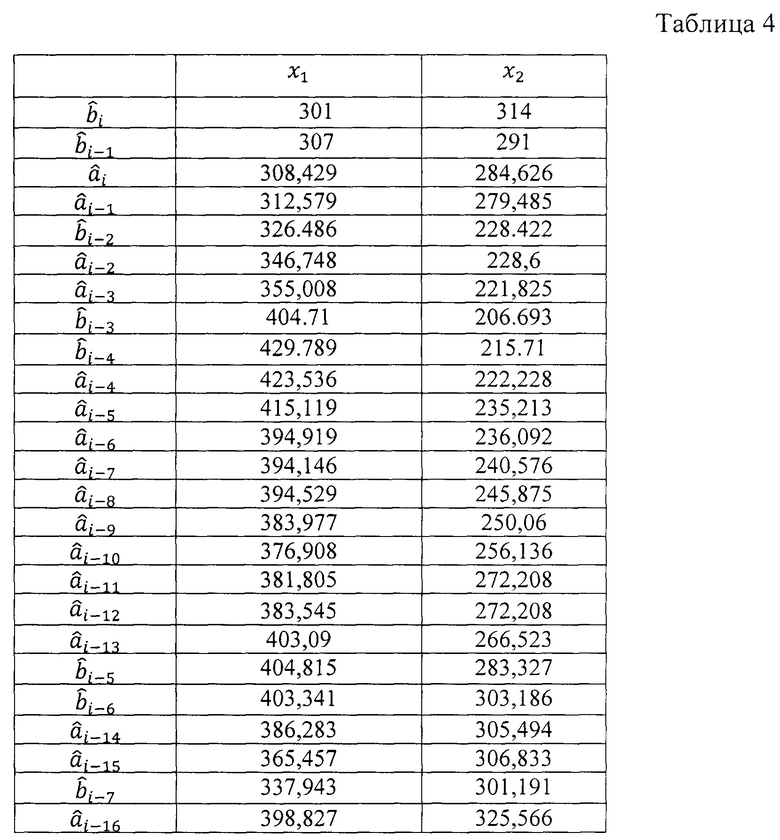
Вначале определяют выпуклую границу класса (фиг. 2б, фиг. 5а) методом Грэхема (R.L. Graham, An efficient algorithm for determining the convex hull of a finite planar set, 28.01.1972). Точки, через которые проходит граница, обозначают bi,  . Значения координат х1 и х2 точек bi, в двумерном пространстве признаков приведены в следующей таблице:
. Значения координат х1 и х2 точек bi, в двумерном пространстве признаков приведены в следующей таблице:
После этого определяют центральную точку С класса (фиг. 2в, фиг. 5а), ее координаты х1 и х2 равны средним значениям соответствующих координат обучающей выборки, и, соответственно, равны (357,427; 258,611). Соединяя центральную точку C с каждой точкой выпуклой границы предварительно заданного класса bi, , разделяют область, занимаемую классом в двумерном пространстве признаков на 8 секторов (фиг. 2г).
Разделение на секторы осуществляют для того, чтобы выполнить в каждом секторе локальный анализ плотности и формы распределения обучающей выборки.
После этого в каждом из 8 секторов производят преобразование координат точек bi, по формулам (1), (2), (3), (4), (5). Полученные значения координат х1 и х2 точек расширенной выпуклой границы  , в двумерном пространстве признаков (фиг. 2д, фиг. 3) приведены в следующей таблице:
, в двумерном пространстве признаков (фиг. 2д, фиг. 3) приведены в следующей таблице:
Если точки обучающей выборки распределены в пространстве признаков, например, как у класса «незавершенный прямоугольник» (фиг. 5а), то расширенная выпуклая граница может не точно отображать форму класса. Для устранения этого в каждом секторе в выпуклую границу предварительно заданного класса добавляют точки aj,  , которые находятся на минимальном расстоянии от двух соседних точек bi и bi-1 выпуклой границы предварительно заданного класса, причем их добавление в границу производят при условии, что другие точки не окажутся вне границы класса.
, которые находятся на минимальном расстоянии от двух соседних точек bi и bi-1 выпуклой границы предварительно заданного класса, причем их добавление в границу производят при условии, что другие точки не окажутся вне границы класса.
После этого формируют вогнутую границу предварительно заданного класса (фиг. 2е, фиг. 5б), соединяя точки bi, и точки aj,  .
.
Значения координат х1 и х2 точек вогнутой границы в двумерном пространстве признаков приведены в следующей таблице:
Затем точки вогнутой границы предварительно заданного класса aj,  преобразуют по формуле (6) в точки
преобразуют по формуле (6) в точки  ,
,  (фиг. 2ж, фиг. 4), после чего формируют окончательную границу предварительно заданного класса (фиг. 2з, фиг. 5в), соединяя точки
(фиг. 2ж, фиг. 4), после чего формируют окончательную границу предварительно заданного класса (фиг. 2з, фиг. 5в), соединяя точки  ,
,  и точки
и точки  ,
,  .
.
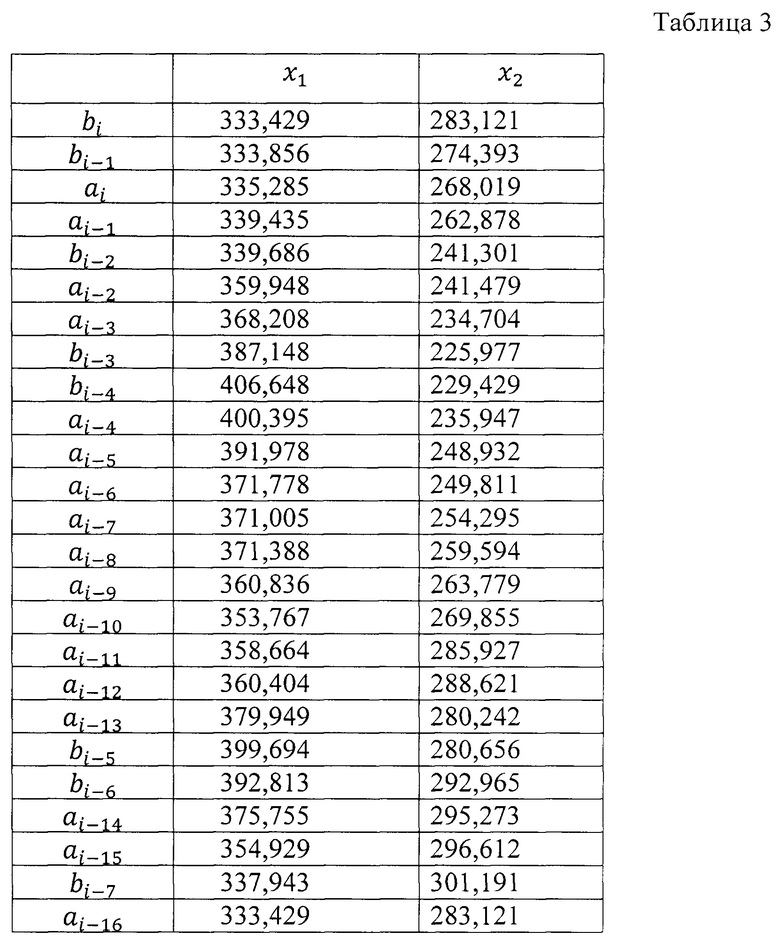
Значения координат х1 и х2 точек окончательной границы предварительно заданного класса «незавершенный прямоугольник» в двумерном пространстве признаков приведены в следующей таблице:
Таким образом, указанными выше действиями осуществляют обучение классификатора по обучающей выборке.
Далее, на основании исследованных и определенных физических признаков, исследуемый объект классифицируют по четырем предварительно заданным классам (фиг. 1д), осуществляя проверку попадания исследуемого объекта по его координатам в двумерном пространстве признаков в каждую из областей, определяемых границами предварительно заданных классов «незавершенный прямоугольник», «прямоугольник», «отрезок», и, таким образом, определяют его расположение внутри одной из трех замкнутых границ или снаружи - в качестве объекта 4-го (N+1) класса.
Если объект соотносят с 4-ым классом, это говорит о том, что на основании оценки схожести он был отфильтрован как шумовой объект (фиг. 1д).
Исследуемый объект на основании физических признаков соотносят с предварительно заданным 1-ым классом и, таким образом, исследуемый объект классифицируют как объект класса «незавершенный прямоугольник» (фиг. 1д).
Использование предлагаемого способа идентификации и классификации объектов позволит повысить точность классификации объектов за счет обеспечения фильтрации шумовых объектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ формирования архитектуры нейросети для классификации объекта, заданного в виде облака точек, способ ее применения для обучения нейросети и поиска семантически схожих облаков точек | 2017 |
|
RU2674326C2 |
| СПОСОБ ИДЕНТИФИКАЦИИ ЭЛЕМЕНТОВ СЛОЖНОЙ СИСТЕМЫ В ПЕРЕМЕННЫХ УСЛОВИЯХ | 2020 |
|
RU2726027C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОЙ ДИАГНОСТИКИ ЗАБОЛЕВАНИЙ | 2013 |
|
RU2540831C2 |
| СПОСОБ ОБУЧЕНИЯ ГЛУБОКИХ НЕЙРОННЫХ СЕТЕЙ НА ОСНОВЕ РАСПРЕДЕЛЕНИЙ ПОПАРНЫХ МЕР СХОЖЕСТИ | 2016 |
|
RU2641447C1 |
| СПОСОБ БИНАРИЗАЦИИ МЕДИЦИНСКИХ ИЗОБРАЖЕНИЙ | 2013 |
|
RU2533876C2 |
| СПОСОБ КЛАССИФИКАЦИИ БАНКНОТ (ВАРИАНТЫ) | 2010 |
|
RU2421818C1 |
| Способ оперативной идентификации морских целей по их информационным полям на базе нейро-нечетких моделей | 2021 |
|
RU2763125C1 |
| Система оперативной идентификации морских целей по их информационным полям на базе нейро-нечетких моделей | 2021 |
|
RU2763384C1 |
| Способ обнаружения и классификации морских целей на базе нейросетевых технологий и элементов искусственного интеллекта | 2021 |
|
RU2780606C1 |
| Способ получения набора объектов трехмерной сцены | 2019 |
|
RU2803287C1 |
Изобретение относится к способам распознавания плоских изображений объектов по их форме с извлечением признаков объектов на основе контурного анализа, с последующей обработкой извлеченных признаков на основе статистического анализа, и может быть использовано в системах технического зрения. Техническим результатом изобретения является повышение точности классификации объектов за счет обеспечения фильтрации шумовых объектов. В способе классификатор содержит (N+1) предварительно заданных классов, при этом принадлежность исследуемого объекта к N предварительно заданным классам, для которых представлена обучающая выборка, определяют в указанном классификаторе посредством оценки схожести по их физическим признакам, а принадлежность исследуемого объекта к (N+1)-му предварительно заданному классу, для которого не может быть представлена обучающая выборка, определяют в указанном классификаторе посредством того, что исследуемый объект не принадлежит ни к одному из N предварительно заданных классов на основе оценки схожести по их физическим признакам. Для выполнения оценки схожести по физическим признакам в указанном классификаторе по меньшей мере одного исследуемого объекта с каждым из N предварительно заданных классов, которые имеют обучающую выборку, осуществляют построение границ для каждого из N предварительно заданных классов посредством анализа плотности и формы распределения обучающей выборки в n-мерном пространстве признаков. 1 з.п. ф-лы, 4 табл., 18 ил.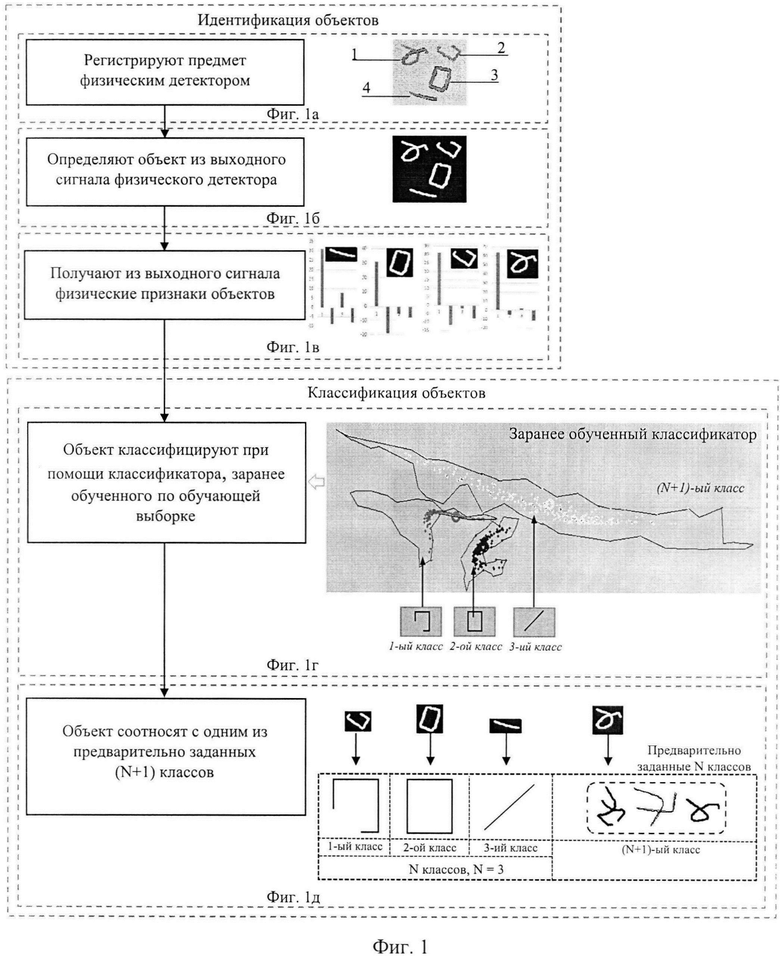
1. Способ идентификации и классификации объектов, согласно которому при идентификации объектов
регистрируют по меньшей мере один предмет по меньшей мере одним из настроенных на него физических детекторов,
по выходному сигналу по меньшей мере одного детектора определяют по меньшей мере один объект, для которого получают из выходного сигнала набор n различных физических признаков,
далее исследуемый объект классифицируют на основании предварительно задаваемых свойств при помощи классификатора, предварительно обученного по обучающей выборке,
при этом исследуемый объект соотносят с одним из N предварительно заданных классов, отличающийся тем, что
указанный классификатор содержит (N+1) предварительно заданных классов,
при этом принадлежность исследуемого объекта к N предварительно заданным классам, для которых представлена обучающая выборка, определяют в указанном классификаторе посредством оценки схожести по их физическим признакам,
принадлежность исследуемого объекта к (N+1)-му предварительно заданному классу, для которого не может быть представлена обучающая выборка, определяют в указанном классификаторе посредством того, что исследуемый объект не принадлежит ни к одному из N предварительно заданных классов на основе оценки схожести по их физическим признакам,
а для выполнения оценки схожести по физическим признакам в указанном классификаторе по меньшей мере одного исследуемого объекта с каждым из N предварительно заданных классов, которые имеют обучающую выборку, осуществляют построение границ для каждого из N предварительно заданных классов посредством анализа плотности и формы распределения обучающей выборки в n-мерном пространстве признаков, после чего осуществляют проверку попадания исследуемого объекта по его координатам в n-мерном пространстве признаков в каждую из областей, определяемых границами N предварительно заданных классов.
2. Способ по п. 1, отличающийся тем, что при построении границ
определяют выпуклую границу предварительно заданного класса, соединяя точки 
где bi - i-я точка выпуклой границы предварительно заданного класса;
 - координаты точки bi в n-мерном пространстве признаков;
- координаты точки bi в n-мерном пространстве признаков;
F - количество точек, образующих выпуклую границу предварительно заданного класса;
далее определяют центральную точку С предварительно заданного класса 
где  - координаты точки С в n-мерном пространстве признаков;
- координаты точки С в n-мерном пространстве признаков;
разделяют область, занимаемую классом в n-мерном пространстве признаков на F секторов, соединяя центральную точку C с каждой точкой выпуклой границы предварительно заданного класса bi,
затем в каждом секторе точки выпуклой границы предварительно заданного класса bi преобразуют, исходя из плотности и формы распределения обучающей выборки предварительно заданного класса, в точки расширенной выпуклой границы предварительно заданного класса

где  - i-я точка расширенной выпуклой границы предварительно заданного класса;
- i-я точка расширенной выпуклой границы предварительно заданного класса;  - координаты точки
- координаты точки  в n-мерном пространстве признаков; F - количество точек, образующих расширенную выпуклую границу предварительно заданного класса,
в n-мерном пространстве признаков; F - количество точек, образующих расширенную выпуклую границу предварительно заданного класса,
по формуле
где ρ(С, bi) - евклидово расстояние от центральной точки С предварительно заданного класса до точки bi;
 - евклидово расстояние от центральной точки С предварительно заданного класса до точки
- евклидово расстояние от центральной точки С предварительно заданного класса до точки 
евклидово расстояние от центральной точки С предварительно заданного класса до точки  расширенной выпуклой границы предварительно заданного класса определяют по формуле
расширенной выпуклой границы предварительно заданного класса определяют по формуле
где Н - сумма евклидовых расстояний от центральной точки С предварительно заданного класса до точки bi и соседней точки bi-1;
Н' - сумма евклидовых расстояний от центральной точки С предварительно заданного класса до точки  и соседней точки
и соседней точки  определяемая из плотности и формы распределения объектов предварительно заданного класса в секторе;
определяемая из плотности и формы распределения объектов предварительно заданного класса в секторе;
сумму евклидовых расстояний Н от центральной точки С предварительно заданного класса до точки bi и соседней точки bi-1 определяют по формуле
Н=ρ(C, bi)+ρ(C, bi-1),
где ρ(C, bi) - евклидово расстояние от центральной точки С предварительно заданного класса до точки bi;
ρ(С, bi-1) - евклидово расстояние от центральной точки С предварительно заданного класса до точки bi-1;
сумму евклидовых расстояний Н' от центральной точки С предварительно заданного класса до точки  и соседней точки
и соседней точки  определяемую из плотности и формы распределения объектов предварительно заданного класса в секторе, вычисляют по формуле
определяемую из плотности и формы распределения объектов предварительно заданного класса в секторе, вычисляют по формуле

где Sk - количество точек в текущем секторе предварительно заданного класса;
k - количество секторов в предварительно заданном классе;
Т - общее количество точек в предварительно заданном классе;
hz - сумма евклидовых расстояний от точки внутри сектора  до точки bi и точки bi-1;
до точки bi и точки bi-1;
сумму евклидовых расстояний hz от точки внутри сектора tƒ до точки bi и точки bi-1 определяют по формуле
hz=ρ(tƒ, bi)+ρ(tƒ, bi-1),
для каждой точки  расширенной выпуклой границы предварительно заданного класса, входящей одновременно в два соседних сектора, вычисляют и усредняют между собой, соответственно, два комплекта координат,
расширенной выпуклой границы предварительно заданного класса, входящей одновременно в два соседних сектора, вычисляют и усредняют между собой, соответственно, два комплекта координат,
определяют расширенную выпуклую границу предварительно заданного класса, соединяя точки 
далее в каждом секторе в выпуклую границу предварительно заданного класса добавляют точки aj, которые находятся на минимальном расстоянии от двух соседних точек bi и bi-1 выпуклой границы предварительно заданного класса, причем их добавление в границу производят при условии, что другие точки не окажутся вне границы класса, при этом 

где aj - j-я точка, добавленная в выпуклую границу предварительно заданного класса;
 - координаты точки aj в n-мерном пространстве признаков; G - количество добавленных точек aj,
- координаты точки aj в n-мерном пространстве признаков; G - количество добавленных точек aj,
формируют вогнутую границу предварительно заданного класса, соединяя точки bi и точки aj,
затем добавленные в выпуклую границу предварительно заданного класса точки aj преобразуют в точки 
где  - преобразованная j-я точка, добавленная в выпуклую границу предварительно заданного класса;
- преобразованная j-я точка, добавленная в выпуклую границу предварительно заданного класса;
 - координаты точки
- координаты точки  в n-мерном пространстве признаков; G - количество добавленных точек
в n-мерном пространстве признаков; G - количество добавленных точек 
по формуле
где ρ(bi, bi-1) - евклидово расстояние между соседними точками выпуклой границы bi и bi-1;
 - евклидово расстояние между соседними точками расширенной выпуклой границы
- евклидово расстояние между соседними точками расширенной выпуклой границы  и
и 
далее формируют окончательную границу предварительно заданного класса, соединяя точки  и точки
и точки 
| СПОСОБ ОБРАБОТКИ БАНКНОТ (ВАРИАНТЫ) | 2010 |
|
RU2438182C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ И КЛАССИФИКАЦИИ ОБЪЕКТА | 2010 |
|
RU2541158C2 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| US 9091780 B2, 28.07.2015. | |||

