Область применения
Изобретение относится к способам обработки медицинских изображений для выделения интересующих исследователей объектов для их последующего применения при диагностике заболеваний.
Уровень техники
Развитие высокоинформативных методов диагностики в медицине, без которых невозможно проведение своевременного и адекватного лечения, напрямую связано с разработкой и внедрением в клиническую практику компьютерных систем обработки различных изображений, например, сетчатки глаза, капилляров ногтеложа и других.
Одной из важных задач компьютерной обработки медицинских изображений является бинаризация исходного изображения, т.е. преобразование исходного изображения в черно-белое. Интересующий исследователя объект обычно выделяется черным цветом, а фон становится белым. В результате бинаризации искомый объект, например кровеносный сосуд, выделяется из исходного изображения и становится доступным для дальнейшей обработки.
Проведение бинаризации изображения существенно облегчает его дальнейшую обработку, в том числе получение различных количественных характеристик выделяемого объекта. При бинаризации важно получить в результате объект, по размерам и форме максимально близкий реально изображенному.
Существует большое количество способов бинаризации, которые можно условно разбить на следующие направления:
- пороговые методы;
- гибридные методы;
- на основе применения вейвлетов;
- на основе применения методов классификации (управляемого обучения).
Наличие огромного количества способов косвенно свидетельствует о том, что нет единого способа, который бы подходил во всех условиях. Проблема как раз и состоит в том, что способы, хорошо зарекомендовавшие себя при конкретном применении, перестают работать в других условиях.
Известен способ, в котором предлагается использовать для классификации каждого пиксела изображения семь конкретных показателей (размерностей). [D. Marin, A. Aquino, М.Е. Gegundez-Arias, and J.M. Bravo, A New Supervised Method for Blood Vessel Segmentation in Retinal Images by Using Gray-Level and Moment Invariants-Based Features, IEEE Trans. Med. Imaging (2011) 146-158].
Сначала выбирается вручную обучающая выборка значительного размера (несколько тысяч точек), которая используется для настройки нейронной сети, используемой в качестве классификатора.
Этот способ является сложным для реализации и трудоемким, т.к. неясно, что нужно сделать, если приемлемый результат не достигается. Для точной настройки нейронной сети требуется обучающая выборка значительного размера. Неясно, подойдут ли предлагаемые размерности для распознавания изображений в другой предметной области.
Задача изобретения
Задачей предлагаемого изобретения является повышение качества бинаризации в том смысле, что форма и размер выделяемого в ходе бинаризации объекта должны максимально совпадать с соответствующими формой и размерами изображенного объекта при сокращении вычислительных затрат на сам процесс бинаризации. Решение задачи.
Поставленная задача решается тем, что предлагается новый способ бинаризации медицинских изображений, заключащийся в выборе вручную некоторого количества точек из эталонного изображения, расчете для них нескольких заранее заданных показателей, выборе из заданного множества показателей тех, в пространстве которых существуют различимые кластеры, образованные точками объекта и фона, после чего в найденном пространстве определяют обучающие выборки для классификаторов, состоящие из точек-медоидов каждого кластера и граничных точек, разделяющих кластеры, затем эти обучающие выборки используют при работе двух классификаторов типа «К ближайших соседей», на вход которых подают последовательно все точки эталонного изображения, причем сначала используют классификатор на основе граничных точек в варианте «квалифицированного большинства», затем для точек, не классифицированных первым классификатором, используют классификатор на основе точек-медоидов в варианте «квалифицированного большинства», а для оставшихся точек классификатор на основе граничных точек в варианте «простого большинства»; выбором обучающих выборок завершают настройку классификаторов, после чего настроенные классификаторы используют аналогично вышеописанному для обработки любых других изображений, полученных на этой же аппаратуре, при этом для каждой точки изображения определяют ее принадлежность к объекту или фону, в результате получают изображение, на котором точки объекта отображаются черным цветом, а точки фона белым.
Новизной изобретения является вся заявленная совокупность признаков.
Сущность изобретения заключается в том, что предлагаемый способ относится к способам на основе применения методов классификации (управляемого обучения). Бинаризация изображения - это не что иное, как принятие решения о принадлежности каждого пиксела изображения к одному из двух классов: искомому объекту или фону.
Изобретение иллюстрируется фиг.1-6.
На фиг.1 приведена блок-схема последовательности операций, иллюстрирующая сущность способа бинаризации медицинских изображений.
На фиг.2 приведена блок-схема последовательности операций, иллюстрирующая процесс настройки классификаторов на основе обработки выбранного изображения в соответствии с изобретением.
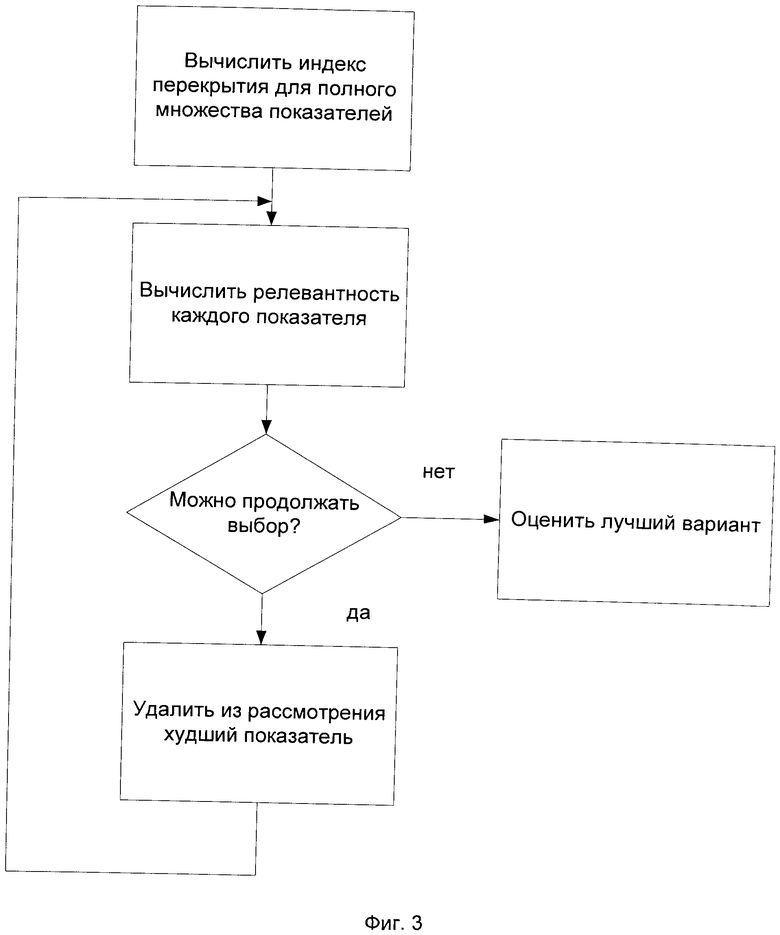
На фиг.3 приведена блок-схема последовательности операций, иллюстрирующая процесс выбора набора показателей, в пространстве которых отобранные точки образуют наилучшие кластеры в соответствии с изобретением.
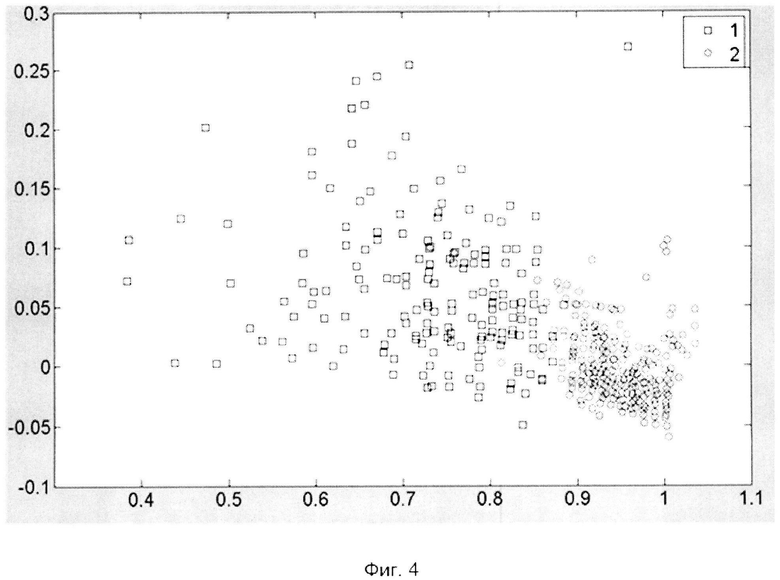
На фиг.4 показаны результаты обнаружения кластеров для случая обработки изображений сосудов сетчатки глаза.
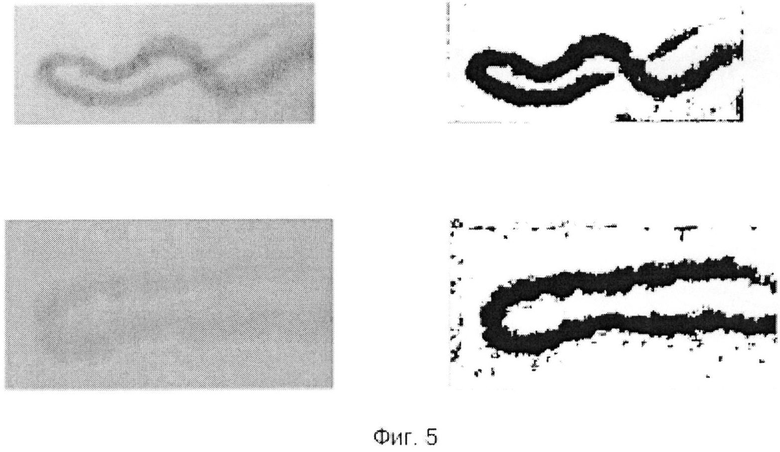
На фиг.5 приведены результаты, иллюстрирующие работу предлагаемого способа на примере обработки изображений капилляров ногтеложа.
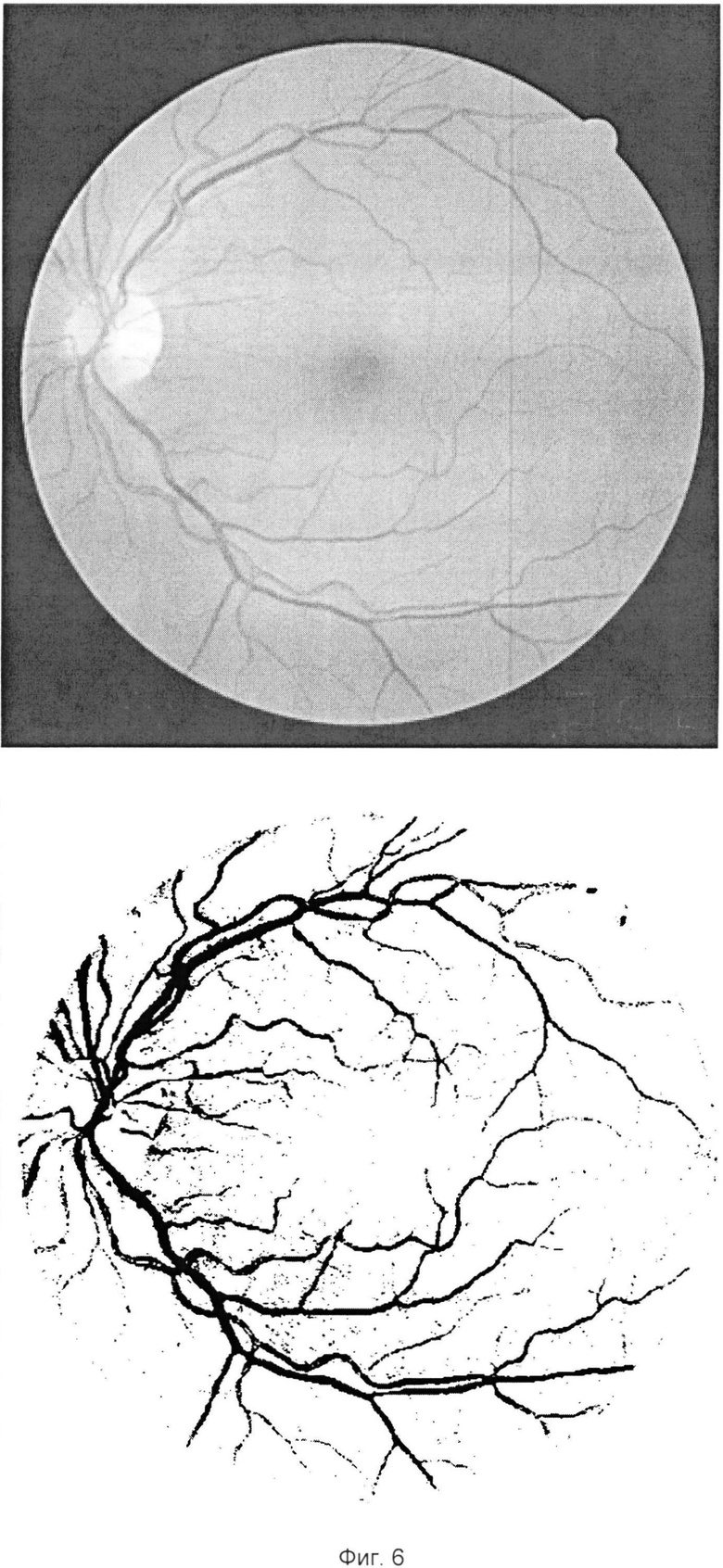
На фиг.6 приведены результаты, иллюстрирующие работу предлагаемого способа на примере обработки изображений сосудов сетчатки глаза. Изображения взяты из базы данных:
Digital Retinal Image for Vessel Extraction (DRIVE) Database. Utrecht, The Netherlands, Univ. Med. Center Utrecht, Image Sci. Inst, http://www.isi.uu,nl/Research/Databases/DRIVE.
Реализация изобретения
Предлагаемый способ осуществляют следующим образом (фиг.1).
Сначала выбирают одно изображение хорошего качества, полученное в типовых условиях использования аппаратуры, с помощью которой это изображение получается. Это изображение будет служить эталоном для настройки классификаторов, которые будут использоваться для бинаризации остальных изображений.
Затем производят настройку классификаторов на основе обработки выбранного изображения. Настройка заключается в выполнении последовательности операций, показанных на фиг.2.
1. Отбор вручную множество точек, принадлежащих объекту, и множество точек, принадлежащих фону
Для каждой из этих точек рассчитывают значения нескольких показателей.
Состав показателей может быть разным. В качестве базового предлагают следующий:
1) интенсивность изображения в точке;
2) разность интенсивности изображения точки и минимального значения в окне 3×3, центром которого является точка (далее «окно»);
3) разность интенсивности изображения точки и среднего значения в «окне»;
4) максимум разности интенсивности изображения в точке и интенсивностей точек в «окне»;
5) градиент точки;
6) разность между максимальным и минимальным значениями интенсивностей точек в «окне».
Пользователи предлагаемого способа определяют состав показателей по своему желанию.
Полученные значения показателей рассматривают в качестве координат в многомерном пространстве. Далее рассчитывают расстояния между точками в этом многомерном пространстве. В качестве метрики предлагается использовать метрику Евклида.
2. Выбор набора показателей, в пространстве которых отобранные точки образуют наилучшие кластеры
Качество бинаризации (распознавания между двумя классами - объектом и фоном) в решающей степени зависит от выбора пространства показателей. Предлагают в качестве показателей выбирать то их подмножество, в котором образуются различимые кластеры объектов и фона. Выбор показателей производят согласно последовательности операций, показанной на фиг.3.
В качестве показателя качества кластеризации предлагают использовать индекс перекрытия, вычисляемый следующим образом: Индекс перекрытия = Σ Sj/N,j=1,N, где Sj=BCj/КБС, BCj количество соседей из класса объектов из КБС, ближайших для точки j, а КБС - количество определяемых ближайших соседей, N - количество выбранных из эталонного изображения точек объекта. Значение КБС зависит от количества выбранных точек объекта и равняется N/10.
Сначала определяют значение индекса перекрытия для исходного множества показателей. Затем оценивают релевантность (значимость) каждого показателя для образования кластеров, а следовательно, для распознавания класса каждой точки. Для этого по очереди удаляют каждый показатель и оценивают индекс перекрытия для оставшегося подмножества показателей. Большее значение индекса перекрытия свидетельствует о наличии лучших кластеров. Удаление показателя может привести как к ухудшению качества кластеров (если значение индекса перекрытия уменьшилось), так и к улучшению. Полученные значения индексов перекрытия сравнивают со значением исходного множества. Если есть большее значение индекса перекрытия, выбор релевантных показателей можно продолжить. Тогда тот показатель, при удалении которого достигнуто максимальное значение индекса перекрытия, удаляют из рассмотрения и выбор продолжается дальше аналогичным образом для оставшихся показателей. Процесс может быть продолжен, пока не будут рассмотрены пары показателей или не будет достигнута ситуация, когда удаление любого показателя только ухудшает качество кластеризации.
Найденный лучший вариант подмножества показателей должен быть в конце обработки оценен визуально. Для визуального отображения многомерного пространства на плоскость предлагают использовать отображение Сэммона (J.W. S amnion, Jr, “A nonlinear mapping for data structure analysis,” IEEE Transactions on Computers, vol. C-18, no. 5, pp.401 - 409, 1969.). Можно увидеть как наличие кластеров, так и их отсутствие. Если кластеры отсутствуют, увеличивают количество показателей и начинают выбор заново. Пример наличия кластеров иллюстрируется на фиг.4.
3. Формирование обучающих выборок для классификаторов
Формируют две обучающие выборки.
Первая обучающая выборка должна содержать примерно равное (нечетное) количество точек, находящихся на границах каждого из классов. В выборку включают только точки, находящиеся на границе, разделяющей кластеры.
Вторая обучающая выборка должна состоять из точек, являющихся медоидами каждого из классов. Размер обучающей выборки зависит от количества выбранных точек объекта и равняется N/10. Обучающая выборка должна содержать равное (нечетное) количество медоидов обоих классов. 4. Применение обученных классификаторов для бинаризации изображения-эталона.
Используют последовательно два классификатора типа «К ближайших соседей».
На вход подают последовательно каждую точку эталонного изображения. Для нее вычисляют значения показателей, выбранных в п.2.
Сначала применяют классификатор, обученный на граничных точках. Вычисляют расстояние в многомерном пространстве между точкой изображения и точками первой обучающей выборки. В качестве метрики используют метрику Евклида. Определяют Kb ближайшего соседа для искомой точки среди точек обучающей выборки. Подсчитывают No - количество среди ближайших соседей - точек, принадлежащих объекту и Nb - количество среди ближайших соседей - точек, принадлежащих фону. Решение о принадлежности искомой точки тому или иному классу принимают по правилу «квалифицированного большинства», т.е. когда количество соседей одного класса значительно превышает количество соседей другого, а именно, если |No-Nb|>=Kb-2, то если No>Nb, точка является точкой объекта, иначе - точкой фона.
Если |No-Nb|<Kb-2, то применяют классификатор, обученный на медоидах.
Определяют Km ближайшего соседа для искомой точки среди точек второй обучающей выборки. Подсчитывают N1 - количество среди ближайших соседей - точек, принадлежащих объекту и N2 - количество среди ближайших соседей - точек, принадлежащих фону. Решение о принадлежности искомой точки тому или иному классу принимают по правилу «квалифицированного большинства», т.е. когда количество соседей одного класса значительно превышает количество соседей другого, а именно, если |N1-N2)>=Km-2, то если N1>N2, точка является точкой объекта, иначе - точкой фона. Если правило «квалифицированного большинства» и в этом случае не выполняется, тогда применяют правило простого большинства: если No>Nb, то точка является точкой объекта, иначе - точкой фона.
5. Оценка полученного результата
Результат бинаризации оценивают визуально. Если результат не удовлетворяет, проводят корректирующие действия. Если результат удовлетворяет, то обе обучающие выборки, а также значения Kb и Km используют для бинаризации других изображений.
6. Проведение корректирующие действия
Возможно проведение следующих корректирующих действий:
- изменить количество точек-медоидов, которые нужно использовать;
- уточнить границу между классами;
- увеличить количество рассматриваемых точек эталонного изображения, причем из той области, которая некачественно отразилась на черно-белом изображении.
После принятия решения о коррекции повторяют последовательность операций, начиная с п.3.
7. Применение настроенных классификаторов для бинаризации каждого изображения, получаемого с помощью той же аппаратуры
Результаты изобретения. В результате заявляемого способа бинаризации медицинских изображений происходит повышение качества бинаризации в том смысле, что форма и размер выделяемого в ходе бинаризации объекта максимально совпадает с соответствующими формой и размерами изображенного объекта, при этом сокращаются вычислительные затраты на сам процесс бинаризации. Это делает возможным проведение количественных измерений характеристик объектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЗИРОВАННОЙ ДИАГНОСТИКИ ЗАБОЛЕВАНИЙ | 2013 |
|
RU2540831C2 |
| ВЫЧИСЛИТЕЛЬНО ЭФФЕКТИВНОЕ МНОГОКЛАССОВОЕ РАСПОЗНАВАНИЕ ИЗОБРАЖЕНИЙ С ИСПОЛЬЗОВАНИЕМ ПОСЛЕДОВАТЕЛЬНОГО АНАЛИЗА НЕЙРОСЕТЕВЫХ ПРИЗНАКОВ | 2019 |
|
RU2706960C1 |
| СПОСОБ И СИСТЕМА ОБНАРУЖЕНИЯ КОНТРАБАНДЫ НАРКОТИКОВ В ПИЩЕВАРИТЕЛЬНОМ ТРАКТЕ ЧЕЛОВЕКА | 2015 |
|
RU2683125C1 |
| Способ распознавания и классификации объектов на изображении | 2024 |
|
RU2836156C1 |
| СПОСОБ РАСПОЗНАВАНИЯ И КЛАССИФИКАЦИИ ФОРМЫ ОБЪЕКТОВ В ЛАБИРИНТНЫХ ДОМЕННЫХ СТРУКТУРАХ | 2012 |
|
RU2522869C2 |
| ГЕНЕРАЦИЯ РАЗМЕТКИ ИЗОБРАЖЕНИЙ ДОКУМЕНТОВ ДЛЯ ОБУЧАЮЩЕЙ ВЫБОРКИ | 2017 |
|
RU2668717C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ДИСТАНЦИОННОГО ВЫБОРА ОДЕЖДЫ | 2020 |
|
RU2805003C2 |
| СПОСОБ И СИСТЕМА ПОИСКА ГРАФИЧЕСКИХ ИЗОБРАЖЕНИЙ | 2022 |
|
RU2807639C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ СВАРНОГО ШВА | 2023 |
|
RU2827116C1 |
| СПОСОБ ОЦЕНКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЖАРОВЫХ ТРУБ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2020 |
|
RU2757532C1 |


Изобретение относится к средствам бинаризации изображений. Техническим результатом является повышение качества бинаризации. Способ заключается в выборе количества точек из эталонного изображения, расчета для них заранее заданных показателей, выборе из указанных показателей тех, в пространстве которых существуют различимые кластеры, образованные точками объекта и фона; в найденном пространстве определяют обучающие выборки для классификаторов, состоящие из точек-медоидов каждого кластера и граничных точек, разделяющих кластеры. В способе указанные выборки используют при работе двух классификаторов типа «К ближайших соседей», на вход которых подают последовательно все точки обрабатываемого изображения, где сначала используют классификатор на основе граничных точек в варианте «квалифицированного большинства», затем для точек, не классифицированных первым классификатором, используют классификатор на основе точек-медоидов в варианте «квалифицированного большинства», а для оставшихся точек классификатор на основе граничных точек в варианте «простого большинства»; выбором обучающих выборок завершают настройку классификаторов. 6 ил.
Способ бинаризации медицинских изображений, заключащийся в выборе вручную некоторого количества точек из эталонного изображения, расчете для них нескольких заранее заданных показателей, выборе из заданного множества показателей тех, в пространстве которых существуют различимые кластеры, образованные точками объекта и фона, после чего в найденном пространстве определяют обучающие выборки для классификаторов, состоящие из точек-медоидов каждого кластера и граничных точек, разделяющих кластеры, затем эти обучающие выборки используют при работе двух классификаторов типа «К ближайших соседей», на вход которых подают последовательно все точки эталонного изображения, причем сначала используют классификатор на основе граничных точек в варианте «квалифицированного большинства», затем для точек, не классифицированных первым классификатором, используют классификатор на основе точек-медоидов в варианте «квалифицированного большинства», а для оставшихся точек классификатор на основе граничных точек в варианте «простого большинства»; выбором обучающих выборок завершают настройку классификаторов, после чего настроенные классификаторы используют аналогично вышеописанному для обработки любых других изображений, полученных на этой же аппаратуре, при этом для каждой точки изображения определяют ее принадлежность к объекту или фону, в результате получают изображение, на котором точки объекта отображаются черным цветом, а точки фона белым.
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2000 |
|
RU2262661C2 |
| СПОСОБ РАСПОЗНАВАНИЯ РАЗРЫВОВ СТРУИ РАСТВОРА НА ИЗОБРАЖЕНИИ | 2006 |
|
RU2336563C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ | 2008 |
|
RU2395787C2 |
| WO 2012016242 A2, 02.02.2012 | |||
| US 6575367 B1, 10.06.2003 | |||
| US 6941013 B1 (THOMAS HUDSON DRAYER), 06.09.2005 | |||

