Изобретение относится к ракетно-космической технике, в частности к испытаниям жидкостных ракетных двигателей малой тяги (ЖРДМТ), используемых в качестве исполнительных органов систем управления объектами ракетно-космической техники в эксплуатационных условиях.
Известен способ, реализуемый в тягоизмерительном устройстве (RU №2307331 С1, МПК G01L 5/13, опубл. 27.09.2007 г.), обеспечивающий установку двигателя на один конец рычажного элемента, закрепленного в станине с возможностью поворота вокруг горизонтальной оси, запуск двигателя и измерение тяги путем воздействия рычажного элемента на измерительный преобразователь.
Описанному способу сопутствуют следующие недостатки: при градуировке устройства действует дополнительное усилие, создаваемое подводящими трубопроводами на торсионную трубку, т.е. градуировка проводится с систематической погрешностью, которую необходимо учитывать при измерениях тяги; существует ограничение диапазона измерений тяги; невозможность проводить градуировку устройства в условиях вакуума и др.
Наиболее близким к заявленному является устройство (Жуковский А.Е. Испытания жидкостных ракетных двигателей: Учебник для студентов авиационных специальностей ВУЗов [Текст] / А.Е. Жуковский, B.C. Кондрусев, В.В. Окорочков. - 2-е изд., перераб. и доп. - М.: Машиностроение, 1992. - 352 с. (стр. 295)) в виде консольно закрепленной на массивной опоре упругой балки, на которую монтируется ЖРДМТ, чаще всего в вертикальном положении соплом вниз. При работе двигателя балка изгибается и по значению упругой деформации можно определить значение действующей тяги. Возникающие в балке напряжения регистрируются, например, с помощью двух тензопреобразователей, наклеенных на противоположные стороны балки для увеличения сигнала и компенсации воздействия температуры окружающей среды. Чтобы погасить колебания упругой системы, появляющееся в моменты запуска и останова ЖРДМТ, а также при переходе с одного режима на другой, применяется гидравлический демпфер. Устройство обеспечивает достаточно высокую точность измерения тяги на стационарных режимах работы.
Недостатками описанного устройства являются следующие: ограничения по уровню измеряемой тяги двигателей как в большую, так и в меньшую сторону, влияние на измеряемые параметры температуры окружающей среды (отличия от градуированных значений), невозможность провести градуировку устройства в эксплуатационных условиях (в вакууме), точность измерений определяется техническими параметрами используемых тензорезисторов, технологией их наклейки и др.
Задачами, на решение которых направлено заявляемое изобретение являются: повышение точности измерения тяги ЖРДМТ, обеспечение возможности проведения градуировок в условиях вакуума (эксплуатационные условия), получение результатов измерений в реальном времени.
Данные задачи решаются за счет того, что заявленное тягоизмерительное устройство для испытаний ЖРДМТ в стационарном режиме работы, состоящее из упругой балки с элементами крепления двигателя, узла крепления балки, выполнено в едином корпусе и снабжено двумя датчиками силы - измерительным и задающим, градуировочной системой создания усилий на упругую балку, при этом один конец упругой балки закреплен на корпусе устройства, а к противоположному концу балки прикреплен весоизмерительный датчик силы, при этом, на корпусе устройства закреплены упоры, ограничивающие перемещение балки в процессе работы, а упругая балка и задающий датчик силы соединены с градуировочной системой создания усилий с помощью соединительной и передающей тяг.
Кроме того, градуировочная система создания усилий на упругую балку выполнена в виде сильфонного блока, соединенного со стендовыми магистралями подачи и дренажа сжатого газа.
Кроме того, узел крепления упругой балки относительно корпуса устройства выполнен, по меньшей мере, в виде одной металлической ленты.
Кроме того, весоизмерительный и задающий датчики силы соединены со стендовой компьютерной системой.
Техническим результатом, обеспечиваемым приведенной совокупностью признаков является высокая точность измерения тяги ЖРДМТ в непрерывном режиме работы, поскольку используются высокоточные силоизмерительные датчики, возможность проводить до и послепусковые градуировки в условиях вакуума, а также контрольные поверочные градуировки, в случае необходимости, в ходе проведения испытаний изделий в реальном времени.
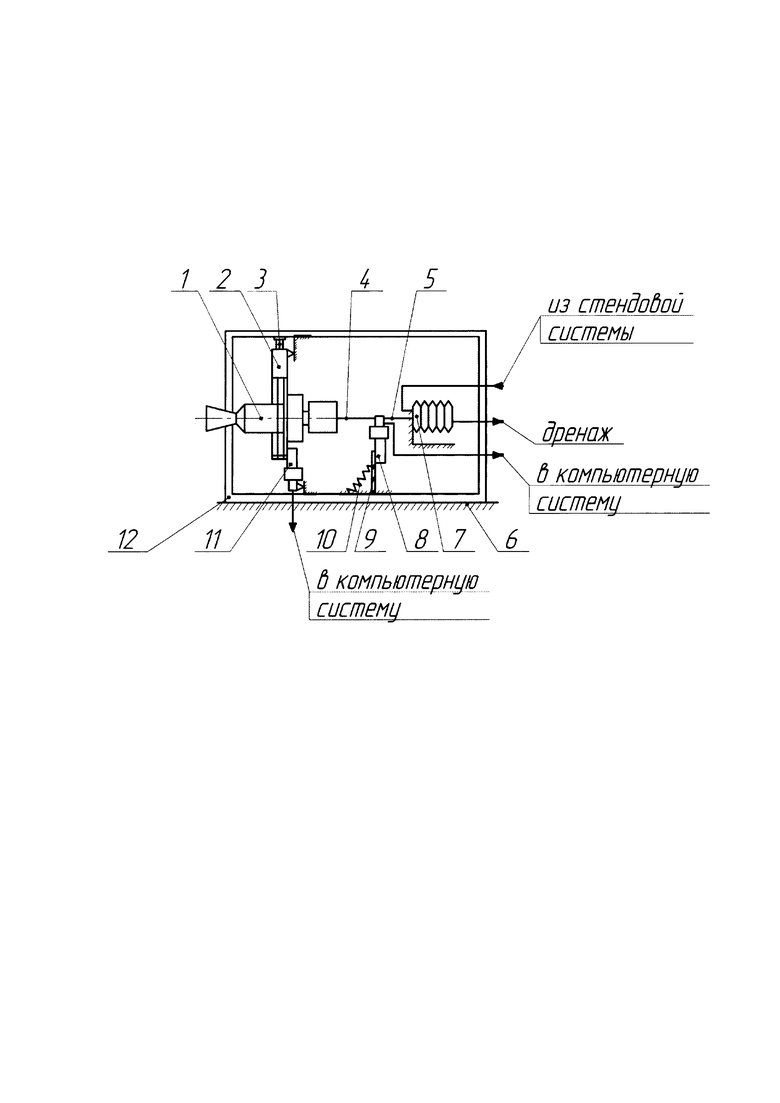
Сущность изобретения поясняется чертежом, где схематично представлено тягоизмерительное устройство для испытаний ЖРДМТ в стационарном режиме работы.
На чертеже изображены:
ЖРДМТ 1, упругая балка 2, узел крепления 3, тяга соединительная 4, тяга передающая 5, рабочий стол вакуумной камеры 6, градуировочная система 7 создания усилий на упругую балку, задающий датчик 8 силы, стойка 9, пружина 10, весоизмерительный датчик 11 силы, корпус устройства 12 с упорами, ограничивающими перемещение балки в процессе работы.
Работает тягоизмерительное устройство следующим образом.
Датчик, с помощью которого производится измерение тяги, требует специальной системы для проведения его градуировки. Этим и обуславливается установка двух датчиков (весоизмерительного 11 и задающего 8) в составе тягоизмерительного устройства. Градуировку тягоизмерительного устройства можно разделить на два этапа: до установки датчиков в устройство и после.
Перед установкой датчиков в стендовую систему измерения тяги каждый из датчиков нагружается грузами известной массы. Сигналы с каждого датчика записываются в компьютере. По соотношениям между контрольными грузами и сигналами с датчиков, регистрирующихся в виде кода, строятся градуировочные зависимости для каждого из датчиков, которые, как правило, имеют линейный вид.
После градуировки оба датчика устанавливаются в корпус устройства. Следует отметить высокие требования к обеспечению соосности камеры изделия и оси приложения силы к весоизмерительному датчику 11, исключению влияния места крепления балки 3 к корпусу 12 на сигнал с датчиков, обеспечению минимального значения жесткости системы ЖРДМТ-магистрали подвода компонентов. Очевидно, полностью исключить влияния последнего на сигнал с датчика невозможно, поэтому после сбора устройства проводится определение корректирующего градуировочного коэффициента измерения тяги для весоизмерительного датчика.
Строится схема расположения датчиков при нахождении корректирующего градуировочного коэффициента измерения тяги весоизмерительного датчика 11. Натяжение пружины 10 ослабляется, и задающий датчик 8 приходит в рабочее положение. В качестве градуировочной системы 7 создания усилий на упругую балку используется пневматический сильфон. Под воздействием сжатого воздуха от системы стенда сильфон 7 создает силу, которая через передающую тягу 5 прикладывается к задающему датчику 8 и через соединительную тягу 4 к весоизмерительному датчику 11 одновременно. Показания с датчиков регистрируются в компьютере. Так как заранее была получена градуировочная характеристика задающего датчика, сигнал с него является эталонным значением силы, прикладываемой к весоизмерительному датчику 11. По соотношению сигналов с задающего 8 и измерительного 11 датчиков находится корректирующий градуировочный коэффициент измерения тяги.
Определение корректирующего градуировочного коэффициента тяги проводится как до проведения испытаний, так и после. Расхождение между до- и послепусковым корректирующим градуировочным коэффициентом измерения тяги, как правило, отсутствует.
После определения корректирующего градуировочного коэффициента измерения тяги весоизмерительного датчика 11, тягоизмерительное устройство приводится в рабочее состояние. Прекращается подача воздуха к градуировочной системе 7, ослабляется передающая тяга 5, пружина 10 сжимается и отводит задающий датчик 8, ослабляется соединительная тяга 4 и разъединяется силовая связь между двумя датчиками.
Значение тяги в ходе испытаний определяется по градуировке весоизмерительного датчика 11 с поправкой на корректирующий градуировочный коэффициент измерения тяги.
| название | год | авторы | номер документа |
|---|---|---|---|
| Тягоизмерительное устройство для испытаний жидкостных ракетных двигателей малой тяги в импульсных режимах работы | 2019 |
|
RU2711813C1 |
| Градуировочное устройство силоизмерительного станка для испытательного стенда малоразмерных газотурбинных двигателей | 2024 |
|
RU2819322C1 |
| СПОСОБ И УСТРОЙСТВА ДЛЯ ИСПЫТАНИЯ СТРЕЛКОВОГО ОРУЖИЯ И/ИЛИ СТЕНДОВЫХ ИСПЫТАНИЙ РАКЕТНЫХ ДВИГАТЕЛЕЙ | 2022 |
|
RU2790353C1 |
| Устройство для измерения массы жидких компонентов топлива при работе ракетных двигателей малой тяги в режиме одиночных включений и в импульсных режимах | 2018 |
|
RU2691873C1 |
| Многодиапазонная тягоизмерительная система | 1973 |
|
SU478206A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕКТОРА ТЯГИ ПРИ ИСПЫТАНИИ РАКЕТНОГО ДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ БОКОВЫХ СОСТАВЛЯЮЩИХ ВЕКТОРА ТЯГИ | 2007 |
|
RU2344387C1 |
| Способ и устройство для испытания стрелкового оружия и/или стендовых испытаний ракетных двигателей | 2023 |
|
RU2799168C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ИМПУЛЬСНОЙ РЕАКТИВНОЙ СИЛЫ ТЯГИ ЖРД МТ | 2011 |
|
RU2478924C1 |
| ТОПЛИВНАЯ МАГИСТРАЛЬ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ МАЛОЙ ТЯГИ | 2002 |
|
RU2239084C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СИЛЫ | 2005 |
|
RU2312318C2 |
Изобретение относится к испытаниям жидкостных ракетных двигателей малой тяги. Устройство состоит из упругой балки с двумя силоизмерительными датчиками (весоизмерительным и задающим), на которой крепится испытуемое изделие и измерительный датчик, узла подвеса, силозадающего устройства сильфонного типа, смонтированных в едином корпусе. Устройство позволяет проводить градуировки системы с помощью высокоточного задающего датчика и компьютерной системы в вакуумных (эксплуатационных) условиях с подключенными и заполненными компонентами топлива трубопроводами и получать результаты измерения тяги двигателей в реальном времени. Изобретение обеспечивает повышение точности определения тяги испытуемого изделия в стационарном режиме работы, а также упрощение технологии градуировок устройства до и после пусков, а в случае необходимости - в процессе проведения программы испытаний. 3 з.п. ф-лы, 1 ил.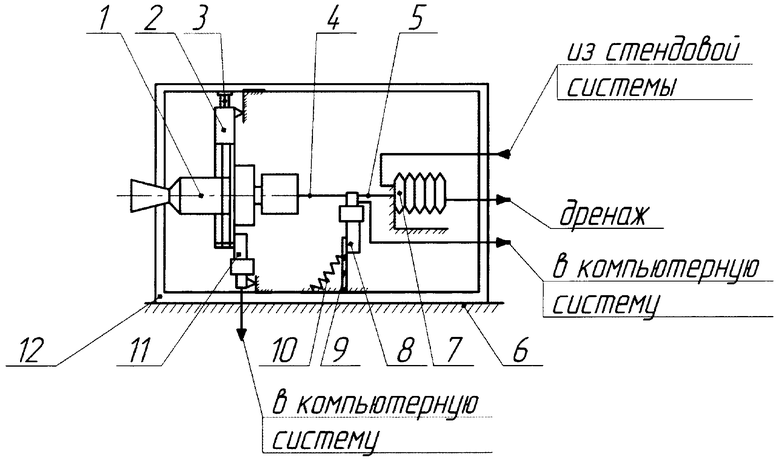
1. Тягоизмерительное устройство для испытаний жидкостных ракетных двигателей малой тяги в стационарном режиме работы, состоящее из упругой балки с элементами крепления двигателя, узла крепления балки, отличающееся тем, что тягоизмерительное устройство выполнено в едином корпусе и снабжено двумя датчиками силы - измерительным и задающим, градуировочной системой создания усилий на упругую балку, при этом один конец упругой балки закреплен на корпусе устройства, а к противоположному концу балки прикреплен весоизмерительный датчик силы, при этом на корпусе устройства закреплены упоры, ограничивающие перемещение балки в процессе работы, а упругая балка и задающий датчик силы соединены с градуировочной системой создания усилий с помощью соединительной и передающей тяг.
2. Тягоизмерительное устройство для испытаний жидкостных ракетных двигателей малой тяги по п. 1, отличающееся тем, что градуировочная система создания усилий на упругую балку выполнена в виде сильфонного блока, соединенного со стендовыми магистралями подачи и дренажа сжатого газа.
3. Тягоизмерительное устройство для испытаний жидкостных ракетных двигателей малой тяги по п. 1, отличающееся тем, что узел крепления упругой балки относительно корпуса устройства выполнен, по меньшей мере, в виде одной металлической ленты.
4. Тягоизмерительное устройство для испытаний жидкостных ракетных двигателей малой тяги по п. 1, отличающееся тем, что весоизмерительный и задающий датчики силы соединены со стендовой компьютерной системой.
| Жуковский А.Е | |||
| и др | |||
| Испытание жидкостных ракетных двигателей: Учебник для студентов авиационных специальностей ВУЗов | |||
| М., Маш., 1992, с.295 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЯГИ МИКРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2307331C2 |
| Стенд для измерения тяги двигателя | 1972 |
|
SU459698A1 |
| RU 21172725 C1, 10.08.1998 | |||
| US 20170175680 A1, 22.06.2017. | |||

