Изобретение относится к измерительной технике и, в частности, к измерению импульсной реактивной силы тяги жидкостных ракетных двигателей малой тяги (ЖРД МТ) при стендовых циклических огневых испытаниях.
Для объективной оценки совершенства конструкции и качества рабочего процесса ЖРД МТ, а также с целью определения энергетических характеристик и ресурса работы двигательных установок космических аппаратов (КА) с длительным циклом функционирования в космическом пространстве проводятся огневые стендовые испытания (ОСИ) ЖРД МТ. Точное измерение при ОСИ характеристик импульсной реактивной силы тяги ЖРД МТ обеспечивает такую оценку.
При огневом включении ЖРД МТ на него начинает действовать сила реакции, истекающей из сопла двигателя струи продуктов сгорания, которая может быть приведена к главному вектору сил и главному моменту сил (см. Добронравов В.В. и др. «Курс теоретической механики», М., Высшая школа, 1974, стр.38…40). Для идеально изготовленного и работающего ЖРД МТ главный вектор сил совпадает с продольной осью симметрии камеры сгорания, а главный момент равен нулю.
Для реально разрабатываемых ЖРД МТ, исходя из допустимых изменений траектории космического аппарата при работе двигателя, нормируются угол главного вектора сил с продольной осью симметрии камеры сгорания - не более 1° и главный момент вращения - не более Fg·ε, где Fg - модуль вектора тяги, Н, ε - эквивалентный главному моменту сил эксцентриситет точки приложения главного вектора тяги относительно оси симметрии двигателя ε<0,5 мм.
Измерения модуля и углов, эксцентриситета вектора тяги относятся к специальным сложным задачам оценки качества ЖРД МТ. Для большинства практических задач контроля основных характеристик ЖРД МТ достаточно определение проекции модуля вектора тяги на ось симметрии камеры сгорания двигателя, которую принято называть основной составляющей вектора тяги или импульсной реактивной силой тяги. Ее величина составляет не менее 99,9% от модуля вектора тяги, что вполне надежно характеризует энергетические возможности ЖРД МТ. Именно определение этой характеристики при многократных циклических испытаниях ЖРД МТ является предметом данной заявки.
В связи с большой динамичностью процессов в ЖРД МТ: длительность фронтов импульсов составляет (2,5…5)10-3 с, длительность импульсов от 5·10-3 с до 3,0 с, частота следования импульсов до 50 Гц, а также необходимостью определения параметров импульсов тяги с пределом погрешности 0,5…1,0%, к силоизмерительным импульсным устройствам (СИУ) предъявляются высокие требования по кинематическому совершенству и устойчивости к динамическим функциям влияния (тангенциальным составляющим и моментам вращения, создаваемым вектором тяги, трехкомпонентным вибрациям и т.д.).
Известно устройство для измерения импульсной реактивной силы тяги ЖРД МТ, содержащее массивный стапель, установленный с помощью амортизаторов на силовой опоре испытательного стенда, нагрузочную раму, с которой соединена силопередающая рама для крепления ЖРД МТ, установленные соосно с возможностью перемещения относительно стапеля вдоль основной измерительной оси устройства, два пояса регулируемых по длине и гибких по основной измерительной оси и размещенных к ней перпендикулярно поперечных подвесок, соединенных одними концами со стапелем, а также задатчик калибровочной силы эталона статической силы и рабочий динамометр, установленные соосно с основной измерительной осью устройства и осью ЖРД МТ (см. Руководство по определению характеристик однокомпонентных ЖРД малых тяг, авторы Бьеклунд Б.А., Роджерс Р.С., Бацевальд Р.К., технический перевод №2120СИ, УДК 629.7.036.54-63 ВИНИТИ, 1982).
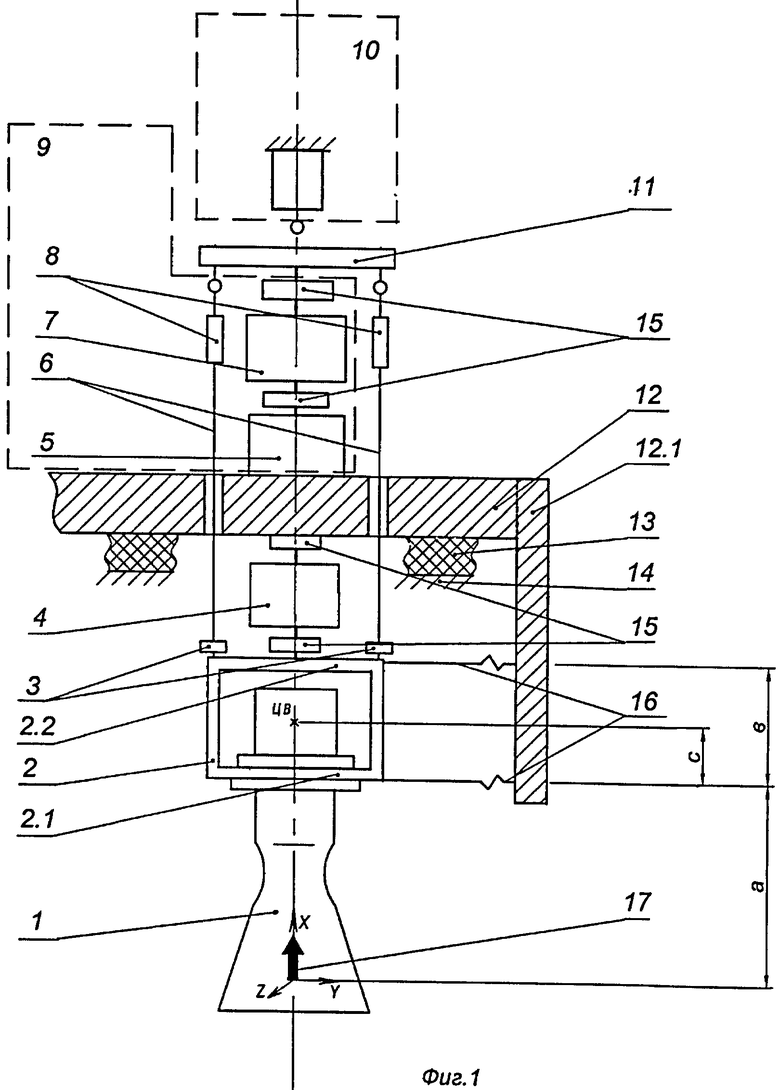
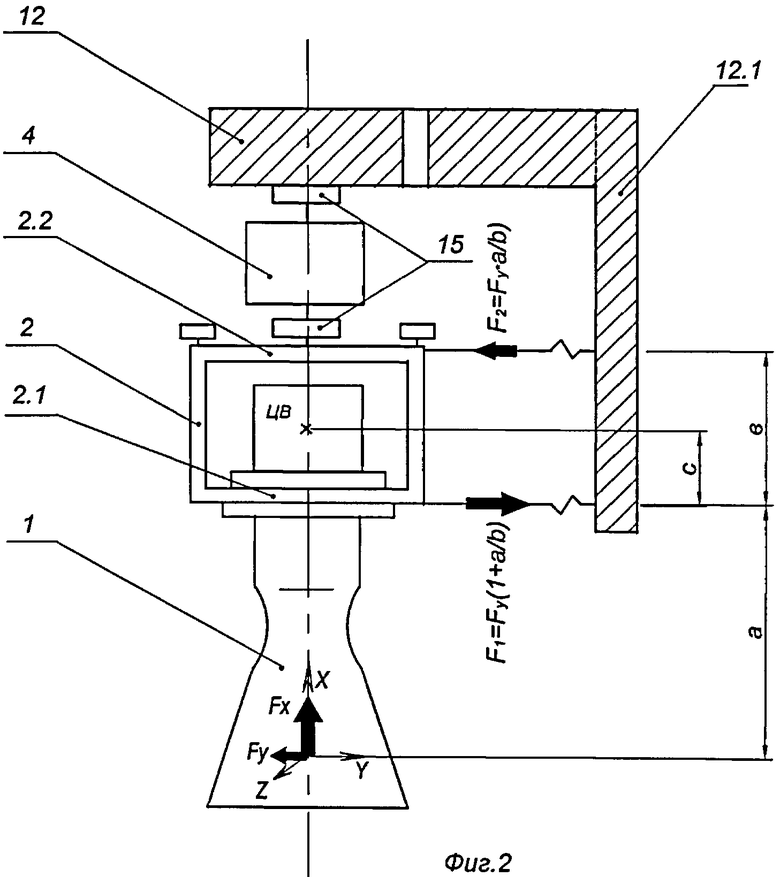
На фиг.1 изображена схема известного устройства для измерения импульсной реактивной силы тяги ЖРД МТ, а на фиг.2 приведена схема сил, возникающих в поясах подвесок при воздействии поперечной составляющей вектора тяги ЖРД МТ, для примера по оси У (Fy) устройства, на силопередающую раму.
Устройство содержит массивный стапель (сейсмическую массу) 12, установленный с помощью амортизаторов 13 на силовой опоре испытательного стенда 14 для снижения влияния вибраций силовой опоры стенда 14 на динамическую погрешность СИУ. Испытываемый двигатель (ЖРД МТ) 1 крепится на передней траверсе 2.1 жесткой силопередающей рамы 2, задняя траверса 2.2 которой присоединена к шарнирам 3 нагрузочной рамы, образованной тягами 6 с неразмыкаемыми связями 8 и траверсой 11. Между стапелем 12 и силопередающей рамой 2 размещен рабочий динамометр 4 с использованием шарниров 15, через которые он воспринимает силу тяги, развиваемую ЖРД МТ 1 и передает ее на массивный стапель 12, который своей реакцией уравновешивает силы, действующие на подвижную часть СИУ. Совпадение оси ЖРД МТ 1 и основной измерительной оси Х силопередающей рамы 2 с осью рабочего динамометра 4, а также нейтрализация действия поперечных составляющих вектора тяги по осям У и Z обеспечивается двумя поясами гибких по оси Х устройства регулируемых по длине поперечных подвесок 16, размещенных перпендикулярно основной измерительной оси Х устройства. При этом одни концы подвесок 16 закреплены на передней 2.1 и задней 2.2 траверсах силопередающей рамы 2, а другие концы закреплены на монтажной части 12.1 стапеля 12. Масса стапеля 12 должна превышать массу ЖРД МТ 1 не менее чем в 100 раз, так как на переходных участках (фронтах) импульса тяги возникает помеха от сил инерции, пропорциональная отношению массы двигателя к суммарной массе стапеля с двигателем. Для калибровки СИУ в статическом режиме устройство содержит эталон статической силы 9, включающий задатчик калибровочной силы 5, опирающийся на массивный стапель 12, контрольный динамометр 7, воспринимающий силу от задатчика 5 и передающий ее через шарниры 15.1 на траверсу 11, которая через нагрузочную раму передает калибрующую силу на силопередающую раму 2 и от нее через шарниры 15 на рабочий динамометр 4. Задатчик калибровочной силы 5 и контрольный динамометр 7 установлены соосно с рабочим динамометром 4. Для динамической калибровки СИУ используется эталон импульсной силы 10, подключаемый к траверсе 11 на время динамической градуировки устройства и создающий известную ступенчатую силу, направленную по основной измерительной оси СИУ.
Устройство работает следующим образом.
После жесткого закрепления испытываемого ЖРД МТ 1 на передней траверсе 2.1 силопередающей рамы 2 и подключения к нему гибких трубопроводов подачи компонентов топлива производится настройка измерительной оси устройства с помощью регулируемых по длине поперечных подвесок 16, статическая калибровка СИУ подачей известных ступеней силы на силопередающую раму 2 с помощью задатчика калибровочной силы 5 и контрольного динамометра 7 при замкнутых шарнирах 3 в диапазоне сил 0,2…1,7 от номинальной тяги ЖРД МТ 1. По данным калибровки рассчитывается статическая градуировочная характеристика СИУ в виде зависимости выходного сигнала рабочего динамометра 4 от заданной измеряемой (калибровочной) силы

и обратной зависимости измеряемой силы от выходного сигнала рабочего динамометра 7

где f и fo - функции прямой и обратной зависимости между измеряемой силой и выходным сигналом рабочего динамометра;
Ui - значение выходного сигнала рабочего динамометра на i-той ступени калибровки, В(А);
Fki - значение статической калибровочной силы на i-той ступени калибровки по показаниям контрольного динамометра, Н.
Затем производится динамическая калибровка СИУ с помощью временно подключаемого к траверсе 11 эталона импульсной силы 10, создающего, например, электромеханическим, механическим или пневматическим способом на траверсе 11 ступенчатое изменение внешней силы с длительностью фронта не более 10-2с, с амплитудой 10…20% от номинальной тяги ЖРД МТ, которое далее через нагрузочную раму 3 и силопередающую раму 2 передается на рабочий динамометр 4. По данным регистрации переходного сигнала рабочего динамометра 4 определяются постоянная времени τc и низшая (первая) частота собственных резонансных колебаний f1peз подвижной части устройства (см. Справочник под редакцией П. Профоса «Измерения в промышленности», М., Металлургия, 1990, том 1, стр.89…96). Проверяется соответствие полученных значений τc и f1peз требованиям разработчика ЖРД МТ по динамическим характеристикам СИУ.
После подтверждения статических и динамических характеристик СИУ начинаются сеансы циклических огневых испытаний ЖРД МТ 1 с измерением импульсной тяги.
При отсутствии силы тяги ЖРД МТ равновесие по измерительной оси Х подвижной части СИУ, образованной силопередающей и нагружающей рамой определяется выражением

где Fpo - сила, измеряемая рабочим динамометром перед включением ЖРД МТ;
Fko - сила, измеряемая контрольным динамометром перед включением ЖРД МТ, Н;
Fxo=0 - составляющая вектора тяги по оси Х (см. фиг.2) перед включением ЖРД МТ.
Равновесие подвижной части по тангенциальным осям У и Z (см. фиг.2) обеспечивается реакциями двух поясов поперечных подвесок 16, заданных при настройке измерительной оси Х устройства.
При огневом включении ЖРД МТ 1 возникающая реактивная сила тяги 17 действует на переднюю траверсу 2.1 силопередающей рамы 2, упруго деформируя раму 2, шарниры 15 и рабочий динамометр 4 до очередного положения равновесия. Так как упругое противодействие движению рамы 2 поясами гибких поперечных подвесок. 16 и трубопроводами подачи компонентов топлива в ЖРД МТ 1 учтено при статической калибровке устройства, а влияние инерционных сил нейтрализуется массой стапеля 12, уравнение равновесия подвижной рамы по измерительной оси оси Х устройства, в зависимости от времени t [с], можно записать следующим образом:

где Fp(t) - зависимость от времени силы, измеряемой рабочим динамометром;
Fk(t) - зависимость от времени силы, измеряемой контрольным динамометром;
Fx(t) - зависимость от времени проекции вектора тяги 17 на ось X.
Равновесие подвижной части СИУ по осям У и Z обеспечивается изменившимися реакциями двух поясов поперечных гибких подвесок 16. На фиг.2 приведены значения изменившихся реакций переднего F1 и заднего F2 поясов гибких подвесок 16 под влиянием составляющей вектора тяги Fy по оси У.
При правильном выборе жесткости устройства по оси Х и жесткости гибких поперечных подвесок по осям У и Z обеспечиваются требуемый рабочий диапазон частот измерения реактивной силы тяги и частичное ограничение боковых сил, действующих на динамометры под влиянием изгибающих моментов тангенциальных составляющих вектора тяги.
Измерение текущих значений амплитуд импульсной тяги 17 с частотой опроса не менее 103 Гц, контроль временных и амплитудных характеристик импульсной силы тяги, их зависимости от количества циклов и условий огневых испытаний осуществляется с использованием промышленных измерительно-вычислительных комплексов испытательного стенда и методов статистической обработки параметров многочисленных реализации огневых включений ЖРД МТ 1. По данным статистической обработки оцениваются значения и деградация во времени характеристик ЖРД МТ 1, его основных агрегатов (камеры сгорания, агрегатов систем подачи компонентов топлива, зажигания двигателя и т.п.).
Вычисление амплитудных значений импульсной реактивной силы тяги F(ti)[H] при испытаниях ЖРД МТ осуществляется по уравнению

где Fp(ti) - сила, измеряемая рабочим динамометром 4 по зависимости (2), Н;
Fн(ti) - сила, измеряемая контрольным динамометром 7, Н;
ti - время i-го отсчета амплитуд силы, с.
При многих достоинствах прототипа: наличие массивного стапеля 12, установленного на силовой опоре стенда 14 на амортизаторах 13, снижающих влияние вибраций стенда на динамическую погрешность СИУ; средств статической и динамической калибровок; а также двух поясов гибких по оси Х устройства регулируемых по длине поперечных подвесок 16 силопередающей рамы 2, имеющей малую массу и высокую жесткость, ему присущ ряд недостатков, особенно существенных при современных высоких требованиях к точности измерения силы тяги ЖРД МТ 1 на импульсных циклических режимах (0,5…1,0%), быстродействию (рабочий диапазон частот до 100 Гц) и работоспособности (до 5·105 циклов огневых включений ЖРД МТ 1 при ресурсных испытаниях).
Рассмотрим факторы, отрицательно влияющие на точность измерения импульсной циклической силы тяги прототипом.
1. В прототипе используется кинематическая схема прямой передачи импульсной реактивной силы тяги ЖРД МТ 1 на рабочий динамометр 4 через передающую раму. Как следствие, это приводит к тому, что рабочий динамометр 4 испытывает большие циклические механические нагрузки. При требуемых динамических характеристиках (рабочий диапазон частот 0…100 Гц) для обеспечения требуемой точности измерения импульсной силы тяги конструкция СИУ должна обладать высокой жесткостью по измерительной оси (до 108 Н/м) и малыми рабочими перемещениями силопередающей рамы 2 (от 10 до 50 мкм). При такой высокой жесткости СИУ рабочий динамометр 4 воспринимает возникающие импульсы реактивной силы тяги как механические удары силопередающей рамы 2 с силой, равной 1,3…1,5 от установившейся величины импульса тяги (см. Справочник под редакцией П. Профоса «Измерения в промышленности», том 1, М., Металлургия, 1990, стр.92-94), что существенно сказывается на циклической усталости упругого элемента рабочего динамометра 4 и резко сокращает ресурс его надежной работы. При числе циклов огневых испытаний ЖРД МТ более 3·105 требуется периодическая замена рабочего динамометра 4, а следовательно, и остановка испытаний, настройка, новые статические и динамические калибровки СИУ. Применение же более «грубого» рабочего динамометра 4 приводит к снижению точности измерения импульсной силы тяги.
2. Конструктивная схема прототипа недостаточно защищает рабочий динамометр 4 от влияния тангенциальных (поперечных) составляющих вектора реактивной тяги ЖРД МТ, так как точка приложения измеряемой силы тяги к рабочему динамометру 4 находится вне плоскостей установки поперечных подвесок 16 силопередающей рамы 2. При воздействии поперечных составляющих вектора тяги возникают повороты силопередающей рамы 2 относительно центра вращения (ЦВ, см. фиг.2), находящегося между передним и задним поясами подвесок 16 силопередающей рамы 2, и соответственно большие силы, изгибающие рабочий динамометр 4, что приводит к увеличению погрешности измерения силы тяги и снижению ресурса работоспособности рабочего динамометра.
Из условия равновесия силопередающей рамы 2 определяются реакции подвесок 16 (см. фиг.2) в первом Fy1 и втором Fy2 поясах гибких подвесок 16 и с учетом жесткости подвесок, положение по оси Х центра вращения силопередающей рамы 2 в соответствии с выражением

где с - расстояние по оси Х устройства от переднего пояса гибких поперечных подвесок передней траверсы 2.1 силопередающей рамы до ее центра вращения, м;
в - расстояние между двумя поясами гибких подвесок по оси Х устройства, м;
а - расстояние между расчетной точкой приложения вектора реактивной силы тяги к двигателю по оси Х до переднего пояса гибких поперечных подвесок, м;
С1 - жесткость первого пояса гибких поперечных подвесок по поперечной оси У устройства, Н/м;
С2 - жесткость второго пояса гибких поперечных подвесок по поперечной оси У устройства, Н/м.
Из схемы сил (фиг.2) и выражения (6) видно, что центр вращения (ЦВ) силопередающей рамы 2 находится на измерительной оси устройства между поясами гибких подвесок 16 силопередающей рамы 2, а передний шарнир 15 рабочего динамометра 4 находится далеко от центра вращения, что неизбежно вызывает действие боковых сил на чувствительный элемент рабочего динамометра 4, и, как следствие, искажение его показаний по величине осевой составляющей вектора тяги (Fx).
3. В схеме силопередачи импульсной силы тяги на динамометры 4 и 7 предусмотрены двойные гибкие поперечные шарниры 15 и 15.1, которые частично снимают боковую нагрузку рабочего 4 и контрольного 7 динамометров, под действием тангенциальных составляющих и эксцентриситета вектора тяги, однако это нерационально, т.к. многочисленные шарниры неизбежно снижают жесткость СИУ по основной измерительной оси и соответственно его рабочий диапазон частот.
Техническая задача, решаемая изобретением, заключается в разработке СИУ для импульсных циклических огневых испытаний ЖРД МТ, обеспечивающего высокую точность измерения амплитуд при требуемом рабочем диапазоне частот измерения импульсной силы тяги в рабочих условиях и работоспособность устройства при ресурсных испытаниях ЖРД МТ с числом циклов измерений при огневых испытаниях ЖРД МТ до 5·105.
Решение указанной задачи достигается тем, что в устройстве для измерения импульсной реактивной силы тяги ЖРД МТ, содержащем массивный стапель, установленный с помощью амортизаторов на силовой опоре испытательного стенда, нагрузочную раму, с которой соединена силопередающая рама для крепления ЖРД МТ, установленные соосно с возможностью перемещения относительно стапеля вдоль основной измерительной оси устройства, два пояса регулируемых по длине и гибких по основной измерительной оси и размещенных к ней перпендикулярно поперечных подвесок, соединенных одними концами со стапелем, а также задатчик калибровочной силы эталона статической силы и рабочий динамометр, установленные соосно с основной измерительной осью устройства и осью ЖРД МТ, согласно изобретению нагрузочная рама выполнена замкнутой и жесткой в виде соединенных тягами передней и задней траверс, расположенных по разные стороны стапеля, к которым подсоединены вторые концы гибких поперечных подвесок, при этом силопередающая рама закреплена на внешней стороне передней траверсы нагрузочной рамы, а на внутренней ее стороне установлен задатчик калибровочной силы, при этом сферический шарнир его силовыводящего штока взаимодействует со стапелем, на противоположной стороне которого установлен рабочий динамометр, с которым взаимодействует сферический шарнир силовоспринимающего штока, закрепленного на задней траверсе нагрузочной рамы.
Кроме того, задатчик калибровочной силы выполнен в виде цилиндрического стакана, внутри которого с кольцевым зазором размещен цилиндрический измерительный сильфон с 10…12 гофрами, прикрепленный одним концом к открытому торцу стакана, обращенного в сторону стапеля, причем на другом конце сильфона закреплено жесткое дно, на котором закреплен регулируемый по длине силовыводящий шток со сферическим шарниром, при этом полость между стаканом и сильфоном соединена с источником подачи давления рабочей среды.
При этом устройство может быть снабжено контрольным динамометром, установленным на стапеле со стороны задатчика калибровочной силы соосно с измерительной осью устройства и взаимодействующим со сферическим шарниром силовыводящего штока задатчика.
Сущность изобретения заключается в том, что использование жесткой нагрузочной рамы, позволяющей предварительно нагрузить рабочий динамометр известной статической силой, равной 1,6…1,8 от номинальной силы тяги ЖРД МТ и направленной встречно измеряемой силе, существенно снижает динамические нагрузки на рабочий динамометр в режиме измерения импульсной циклической тяги, так как он работает на разгрузку. Кроме того, при таком исполнении нагрузочной рамы обеспечивается установка силовоспринимающего элемента рабочего динамометра с помощью двух поясов регулируемых по длине и гибких по основной измерительной оси и размещенных к ней перпендикулярно поперечных подвесок в центр вращения подвижных частей устройства при воздействии тангенциальных составляющих и эксцентриситета вектора реактивной силы тяги ЖРД МТ, что в совокупности с использованием измерительного сильфона в задатчике силы, имеющего незначительную жесткость к поперечным силам и изгибающим моментам, снижает паразитное влияние поперечных сил на рабочий динамометр и, соответственно, погрешность измерения амплитуд импульсной силы тяги ЖРД МТ.
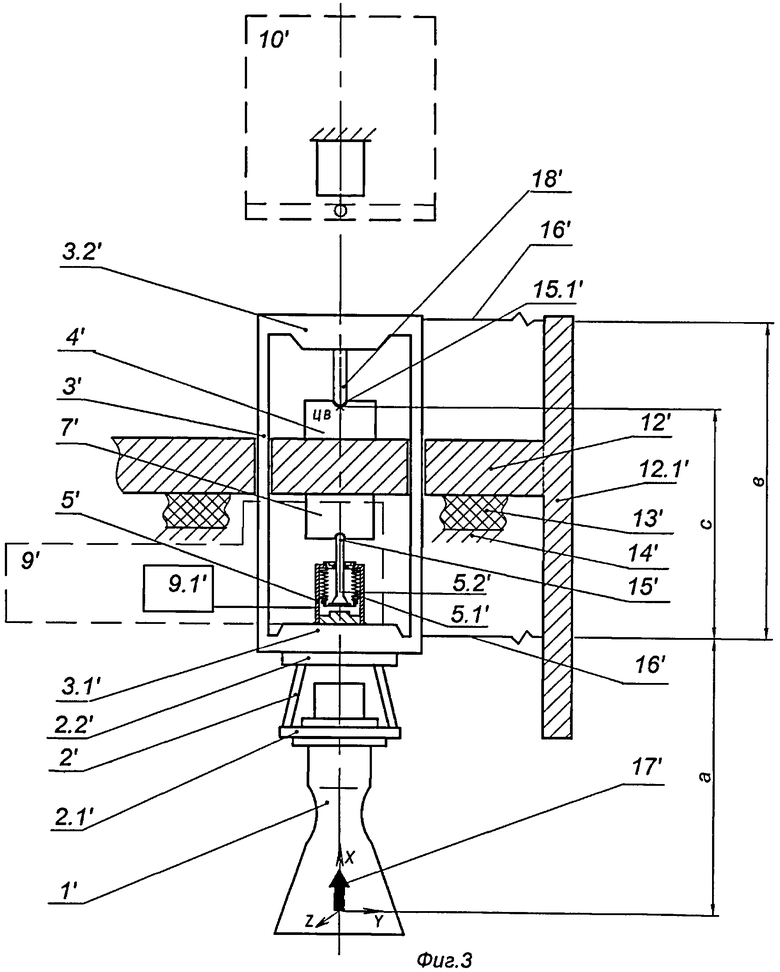
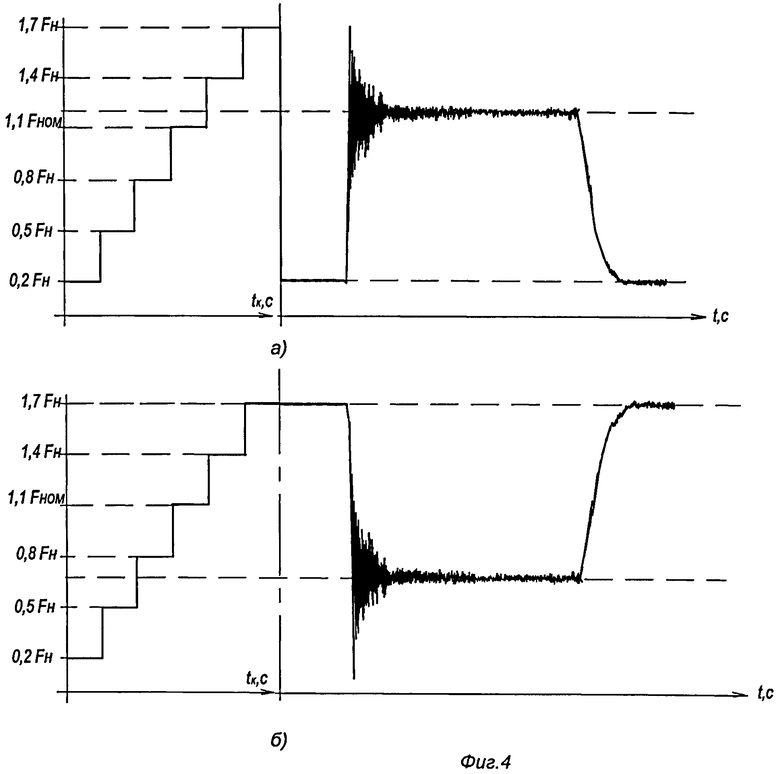
На фиг.3 изображена схема предлагаемого устройства для измерения импульсной реактивной силы тяги ЖРД МТ, а на фиг.4 показаны графики сил, действующих на рабочие динамометры при калибровке (слева) и испытаниях (справа) для прототипа (фиг.4а) и предлагаемого устройства (фиг.4б) соответственно.
Устройство для измерения импульсной реактивной силы тяги ЖРД МТ содержит массивный стапель 12' для защиты от влияния вибраций, установленный с помощью амортизаторов 13' на силовой опоре 14' испытательного стенда. На передней траверсе 2.1' жесткой силопередающей рамы 2' крепится испытываемый ЖРД МТ 1'. При этом силопередающая рама 2' жестко соединена с передней траверсой 3.1' жесткой нагружающей рамы 3', включающей две тяги, верхнюю траверсу 3.2'. С противоположной стороны передней траверсы 3.1' рамы 3' установлен задатчик калибровочной статической силы 5', выполненный в виде цилиндрического стакана, открытый торец которого обращен в сторону стапеля. Внутри стакана с кольцевым зазором размещен цилиндрический измерительный сильфон 5.1' с 10…12 гофрами, прикрепленный одним концом к открытому торцу стакана, а на другом конце сильфона 5.1' закреплено жесткое дно, на котором закреплен регулируемый по длине силовыводящий шток 5.2', который своим сферическим шарниром взаимодействует со стапелем 12' или с контрольным динамометром 7', соосно и жестко закрепленным на стапеле 12', как это изображено на фиг.3. При этом полость между стаканом и сильфоном 5.1' соединена с источником подачи давления рабочей среды 9.1'. Количество гофров 10…12 сильфона 5.1' обеспечивает оптимальное соотношение его характеристик - устойчивости по оси Х и малой жесткости по осям X, У, Z устройства.
Для совмещения общей оси силопередающей рамы 2' и нагрузочной рамы 3' с измерительными осями рабочего 4' и контрольного 7' динамометров, соосно установленных на стапеле 12', нагрузочная рама 3' крепится траверсами 3.1' и 3.2' с помощью регулируемых подвесок 16' на монтажной части 12.1' стапеля так, чтобы шаровой шарнир 15', задатчик силы 5' и шарнир 15.1' силовоспринимающего штока 18' совпадали с силоприемными элементами рабочего 4' и контрольного 7' динамометров, т.е. - с основной измерительной осью устройства.
Для статической калибровки устройства используются эталон статической силы 9', включающий источник известного давления 9.1' и задатчик силы 5', а для динамической - эталон импульсной силы 10', временно подключаемый к траверсе 3.2' нагрузочной рамы 3'.
В качестве упругого подвижного элемента задатчика калибровочной силы 5' предлагается использовать измерительный сильфон 5.1' по ГОСТ 214382-75. Помимо воспроизведения точной калибрующей силы сильфон 5.1' со штоком 5.2' выполняют роль поперечного шарнира, снижающего действие поперечных составляющих вектора тяги на рабочий 4' и контрольный 7' динамометры, так как изгибная и поперечная жесткость сильфона малы.
Для повышения точности и надежности измерения импульсной силы тяги между штоком 5.2' задатчика силы 5' и стапелем 12' соосно с рабочим динамометром 4' может быть установлен контрольный динамометр 7', погрешность которого не превышает 0,1%.
После установки испытываемого ЖРД МТ 1' на силопередающую раму 2' и подключения к нему гибких трубопроводов подачи компонентов топлива, настройки измерительной оси устройства с помощью гибких подвесок 16' производятся статическая и динамическая калибровки СИУ с помощью устройств 9' и 10' аналогично прототипу без каких-либо отличий.
Затем с помощью задатчика калибровочной силы 5' производится статическое нагружение рабочего динамометра 4' стабильной избыточной силой в диапазоне 1,6…1,8 от номинальной тяги испытываемого ЖРД МТ 1', направленной встречно реактивной силе тяги 17' двигателя. Для этого от источника давления 9.1' в полость сильфона 5.1' подают рабочую среду. Величина начальной статической нагружающей силы Fнo[H] на задатчике калибровочной силы 5' контролируется по показаниям точного датчика давления рабочей среды (на чертеже условно не показан) в источнике давления 9.1', например, типа APT, имеющего предел погрешности 0,125% в диапазоне частот 0…160 Гц (см. Каталог «Интеллектуальные приборы измерения давления», ЭПО «Сигнал», г. Энгельс, 2007, стр.21…24) в соответствии с выражением (4)

где Sэфф - эффективная площадь измерительного сильфона, м2, определяется при калибровке задатчика с погрешностью не более 0,1%;
Рно - давление рабочей среды в задатчике силы, МПа;
Сэфф - эффективная жесткость сильфона, Н/мм, нормируется ГОСТ 214382-75 и индивидуально определяется при калибровке задатчика силы;
ΔХ - рабочий ход подвижной части СИУ 0,01 мм<ΔХ<0,02 мм, уточняется при калибровке СИУ.
Для измерительных сильфонов из стали 38НХТЮ по ГОСТ21482-76 величина второго члена в выражении (4) не превышает 0,1…0,15% от воспроизводимой силы, что позволяет его в большинстве случаев не учитывать.
Это нагруженное состояние СИУ является исходным перед огневыми испытаниями ЖРД МТ.
Устройство для измерения импульсной реактивной силы тяги ЖРД МТ работает следующим образом.
Под воздействием измеряемой реактивной силы тяги двигателя 17' силопередающая рама 2', а вместе с ней и нагрузочная рама 3' начинают двигаться по измерительной оси Х в направлении действующего от ЖРД МТ 1' вектора силы 17' до нового положения равновесия. Так как суммарная жесткость рабочего динамометра 4' и нагрузочной рамы 3' по измерительной оси Х устройства в тысячи раз больше жесткости измерительного сильфона 5.1' задатчика калибровочной силы 5', рабочий динамометр 4' будет разгружаться практически синхронно с действующей от двигателя силой, а сила, развиваемая задатчиком калибровочной силы 5' ввиду его малой жесткости будет практически неизменной.
При этом уравнение равновесия сил, действующих на подвижную часть по измерительной оси Х СИУ будет иметь вид

а амплитуды измеряемой импульсной силы тяги F(ti)[H] ЖРД МТ определятся из выражения

где Fн(ti) - усилие, Н, развиваемое задатчиком калибровочной силы в момент времени ti и определяемое по показаниям точного датчика давления рабочей среды в задатчике силы 5' согласно зависимости (7) или по показаниям контрольного динамометра 7';
Fp(ti) - сила, измеряемая рабочим динамометром в момент ti по зависимости (2), Н;
ti - время i-го отсчета, с.
Из графиков сил, действующих на рабочие динамометры (см. фиг.4), видно, что рабочий динамометр 4' предлагаемого устройства при одной и той же действующей на СИУ величине реактивной силы тяги двигателя 17' подвергается динамическим нагрузкам при средней величине нагружающей его по оси Х силы, в два раза меньшей, чем у прототипа.
Действие поперечных составляющих и изгибающих моментов реактивной силы тяги 17' на рабочий динамометр 4' парируется размещением его силоприемного элемента в центре вращения подвижной части СИУ с помощью двух поясов гибких регулируемых подвесок 16'.
Таким образом, использование жесткой нагрузочной рамы 3', обеспечивающей закрепление на ее передней траверсе задатчика силы 5', предварительное нагружение рабочего динамометра 4' известной силой, создаваемой задатчиком 5', направленной встречно измеряемой реактивной силе, и размещение двух поясов гибких поперечных подвесок по разным сторонам стапеля, обеспечивающее подстройку положения силоприемного элемента рабочего динамометра 4' в центр вращения (ЦВ) подвижной части СИУ, позволяют существенно снизить продольные и поперечные динамические нагрузки, действующие на рабочий динамометр при огневых циклических испытаниях ЖРД МТ 1'. Это существенно повышает точность измерения импульсной силы тяги ЖРД МТ и ресурс работы СИУ.
Использование в задатчике силы 5' измерительного сильфона 5.1', имеющего малые поперечную и изгибную жесткости, обеспечивает воспроизведение известной статической силы при калибровке и работе СИУ, а также защиту рабочего 4' и точного контрольного динамометра 7' (в случае его применения) от изгибающих моментов, создаваемых реактивной силой тяги ЖРД МТ, что в совокупности с размещением силоприемного элемента рабочего динамометра 4' в центре вращения подвижной части исключает необходимость использования в схеме силопередачи устройства гибких поперечных шарниров, снижающих жесткость СИУ и соответственно рабочий диапазон частот.
При испытаниях ЖРД МТ для долговременно работающих космических аппаратов и особенно предназначенных для освоения дальнего космоса необходима повышенная точность измерения импульсной силы тяги, что обеспечивает минимизацию запасов компонентов топлива на борту КА, выбор наиболее экономичных по расходу компонентов циклограмм включения двигателя и, как следствие, экономичность космических проектов.
Повышение точности СИУ может быть обеспечено включением в его конструкцию между штоком 5.2' задатчика силы 5' и стапелем 12' контрольного динамометра 7' с пределом погрешности (0,015…0,02)% (см., например, динамометры класса С6 фирмы НВМ, журнал «Приборы», №2 (42), 2003 г.).
По сравнению с суммой погрешностей датчика давления в задатчике силы (0,125%) и погрешности определения эффективной площади измерительного сильфона (0,1%) применение контрольного динамометра с пределом погрешности 0,02% снизит погрешность СИУ не менее чем на 0,2%.
Изготовлен и испытан опытный образец предлагаемого устройства на диапазон измеряемых амплитуд импульсной реактивной силы тяги 100…1500 Н и рабочий диапазон частот 0…100 Гц. В качестве рабочего динамометра 4' использован микроэлектронный датчик импульсной силы типа ДИС180 на рабочий диапазон измерения силы до 2500 Н, имеющий жесткость не менее 0,5·108 Н/м и предел погрешности измерения не более 0,3%.
По результатам экспериментальных исследований получены следующие основные метрологические характеристики опытного образца СИУ:
- предел основной приведенной погрешности измерения амплитуд импульсов силы тяги 0,5% (абсолютная погрешность ≤ 7Н);
- первая резонансная частота устройства f1peз≥250 Гц при весе ЖРД МТ до 12 кгс (обычно вес ЖРД МТ с силой тяги 1500 Н не превышает 10 кгс);
- количество воздействующих импульсов силы тяги ≥5·105;
- дополнительная погрешность измерения амплитуд силы тяги от воздействия поперечных составляющих вектора тяги величиной до 3% от величины модуля вектора тяги не превышает 0,1%.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ВЫДАЧИ ИМПУЛЬСОВ ТЯГ | 2014 |
|
RU2560645C1 |
| ДАТЧИК ИМПУЛЬСНЫХ ДАВЛЕНИЙ ЖИДКОСТНЫХ, ГАЗООБРАЗНЫХ И СМЕШАННЫХ СРЕД С НЕСТАЦИОНАРНОЙ ТЕМПЕРАТУРОЙ | 2011 |
|
RU2460049C1 |
| УЗЕЛ КАЧАНИЯ КАМЕРЫ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ (ЖРД) | 2014 |
|
RU2555092C1 |
| СПОСОБ КАЛИБРОВКИ ТЕНЗОМЕТРИЧЕСКИХ ВЕСОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2021 |
|
RU2777350C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ | 2003 |
|
RU2250446C2 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ | 2013 |
|
RU2524483C1 |
| СИЛОВОЙ БЛОК ДВИГАТЕЛЬНОЙ УСТАНОВКИ РАКЕТЫ-НОСИТЕЛЯ | 2012 |
|
RU2485342C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С УПРАВЛЯЕМЫМ ВЕКТОРОМ ТЯГИ И УЗЕЛ ПОДВЕСКИ КАМЕРЫ СГОРАНИЯ | 2009 |
|
RU2412370C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ | 1999 |
|
RU2158838C2 |
| СПОСОБ ДЕМОНТАЖА БАЛОЧНОГО ЖЕЛЕЗОБЕТОННОГО ПРОЛЕТНОГО СТРОЕНИЯ МОСТА С ИСПОЛЬЗОВАНИЕМ ВАНТОВОЙ СИСТЕМЫ | 2013 |
|
RU2534556C1 |
Изобретение относится к измерительной технике, в частности к измерению импульсной реактивной силы тяги жидкостных ракетных двигателей малой тяги (ЖРД МТ) при огневых стендовых испытаниях при оценке качества конструкции и рабочего процесса. Устройство для измерения импульсной реактивной силы тяги ЖРД МТ, содержащее массивный стапель, установленный с помощью амортизаторов на силовой опоре испытательного стенда, нагрузочную раму, с которой соединена силопередающая рама для крепления ЖРД МТ, установленные соосно с возможностью перемещения относительно стапеля вдоль основной измерительной оси устройства, два пояса регулируемых по длине и гибких по основной измерительной оси и размещенных к ней перпендикулярно поперечных подвесок, соединенных одними концами со стапелем, а также задатчик калибровочной силы эталона статической силы и рабочий динамометр, установленные соосно с основной измерительной осью устройства и осью ЖРД МТ, при этом нагрузочная рама выполнена замкнутой и жесткой в виде соединенных тягами передней и задней траверс, расположенных по разные стороны стапеля, к которым подсоединены вторые концы гибких поперечных подвесок, при этом силопередающая рама закреплена на внешней стороне передней траверсы нагрузочной рамы, а на внутренней ее стороне установлен задатчик калибровочной силы, при этом сферический шарнир его силовыводящего штока взаимодействует со стапелем, на противоположной стороне которого установлен рабочий динамометр, с которым взаимодействует сферический шарнир силовоспринимающего штока, закрепленного на задней траверсе нагрузочной рамы. Изобретение обеспечивает повышение точности и работоспособности устройства. 2 з.п. ф-лы, 4 ил.
1. Устройство для измерения импульсной реактивной силы тяги ЖРД МТ, содержащее массивный стапель, установленный с помощью амортизаторов на силовой опоре испытательного стенда, нагрузочную раму, с которой соединена силопередающая рама для крепления ЖРД МТ, установленные соосно с возможностью перемещения относительно стапеля вдоль основной измерительной оси устройства, два пояса регулируемых по длине и гибких по основной измерительной оси и размещенных к ней перпендикулярно поперечных подвесок, соединенных одними концами со стапелем, а также задатчик калибровочной силы эталона статической силы и рабочий динамометр, установленные соосно с основной измерительной осью устройства и осью ЖРД МТ, отличающееся тем, что нагрузочная рама выполнена замкнутой и жесткой в виде соединенных тягами передней и задней траверс, расположенных по разные стороны стапеля, к которым подсоединены вторые концы гибких поперечных подвесок, при этом силопередающая рама закреплена на внешней стороне передней траверсы нагрузочной рамы, а на внутренней ее стороне установлен задатчик калибровочной силы, при этом сферический шарнир его силовыводящего штока взаимодействует со стапелем, на противоположной стороне которого установлен рабочий динамометр, с которым взаимодействует сферический шарнир силовоспринимающего штока, закрепленного на задней траверсе нагрузочной рамы.
2. Устройство по п.1, отличающееся тем, что задатчик калибровочной силы выполнен в виде цилиндрического стакана, внутри которого с кольцевым зазором размещен цилиндрический измерительный сильфон с 10…12 гофрами, прикрепленный одним концом к открытому торцу стакана, обращенного в сторону стапеля, причем на другом конце сильфона закреплено жесткое дно, на котором закреплен регулируемый по длине силовыводящий шток со сферическим шарниром, при этом полость между стаканом и сильфоном соединена с источником подачи давления рабочей среды.
3. Устройство по п.1, отличающееся тем, что оно снабжено контрольным динамометром, установленным на стапеле со стороны задатчика калибровочной силы соосно с измерительной осью устройства и взаимодействующим со сферическим шарниром силовыводящего штока задатчика.
| СПОСОБ ИЗМЕРЕНИЯ СИЛЫ ТЯГИ РЕАКТИВНОГО ДВИГАТЕЛЯ И СТЕНД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2221995C2 |
| СПОСОБ ИЗМЕРЕНИЯ СИЛЫ ТЯГИ РЕАКТИВНЫХ ДВИГАТЕЛЬНЫХ УСТАНОВОК И СТЕНД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2221996C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ РАКЕТНЫХ ДВИГАТЕЛЕЙ МАЛОЙ ТЯГИ | 1990 |
|
SU1831097A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОСНОВНЫХ ПАРАМЕТРОВ РАКЕТНЫХ ДВИГАТЕЛЕЙ МАЛОЙ ТЯГИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1989 |
|
SU1828257A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО ОСТАНОВА ТКАЦКОГО СТАНКА ПРИ ОБРЫВЕ УТОЧНОЙ НИТИ | 0 |
|
SU342970A1 |
| US 3413844 А, 03.12.1969. | |||

