Изобретение относится к области метеорологии, а именно к устройствам измерения пространственных распределений параметров атмосферы: температуры, давления, концентрации газовых и аэрозольных примесей и т.д. на высотах до 30 км и выше. Данные измерения необходимы для составления прогнозов погоды, изучения процессов, приводящих к изменению климата, прогнозирования последствий загрязнения окружающей среды, исследования изменчивости озонового слоя и т.д.
Известно техническое решение, реализующее способ мониторинга атмосферного воздуха [Способ мониторинга атмосферы (патент РФ №2471209)], включающее беспилотный летательный аппарат, оснащенный навесным измерительным оборудованием, производящий измерения концентрации загрязняющих примесей во время полета по заданному маршруту на различных высотах до 1000 м. Недостатком данного технического средства является невозможность производить измерения на больших высотах (например, в стратосфере), т.к. высота полета беспилотных летательных аппаратов ограничена несколькими километрами.
Известно устройство измерения горизонтальных и вертикальных распределений параметров атмосферы с помощью самолетов-лабораторий [Система авиационного экологического мониторинга загрязнения атмосферы в крейсерском полете (патент РФ №2304293)]. В этом случае измерительная аппаратура устанавливается на борту самолета, а измерения пространственных распределений параметров атмосферы проводятся во время полета самолета по заданному маршруту. Недостатком данного технического решения является то, что данное устройство является дорогостоящим из-за высокой стоимости как создания самолета-лаборатории, так и его эксплуатации. Все это приводит к тому, что измерения пространственных распределений параметров атмосферы с помощью самолетов-лабораторий проводятся не регулярно, а только в рамках отдельных проектов. При этом данное средство не позволяет производить контактные измерения параметров атмосферы выше максимальной высоты полета самолета, которая ограничена, как правило, тропосферными высотами (до 12 км).
Технической задачей предлагаемого изобретения является расширение функциональных возможностей системы путем измерения атмосферных параметров по заданной траектории полета при снижении ЛА при одновременном повышении сохранности (живучести) измерительной аппаратуры и возможности многократного регулярного ее использования.
Заявленный технический результат достигается за счет того, что система измерения пространственных распределений параметров атмосферы, включающая шар-зонд или аэростат, наполненные водородом или гелием, измерительную аппаратуру, соединенную при помощи линии связи с наземной станцией, согласно изобретению система дополнительно содержит летательный аппарат (ЛА) и устройство управления полетом ЛА, при этом измерительная аппаратура установлена на борту данного летательного аппарата, а оптимальный режим измерения параметров атмосферы обеспечивается при следующей математической зависимости скорости снижения (Vверт) от плотности воздуха (ρ) и характеристик летательного аппарата:

где ρ - плотность воздуха (кг/м3), G - вес летательного аппарата (Н), S* - площадь крыла (м2), 1/k - тангенс угла планирования, Cy - коэффициент подъемной силы.
Причем устройство управления полетом установлено на летательном аппарате и выполнено в виде устройства автоматического пилотирования.
Причем устройство управления полетом летательного аппарата установлено на наземной станции.
Причем система содержит устройство расцепления летательного аппарата с шаром-зондом или аэростатом, управляемое посредством линии связи с наземной станции.
Причем система содержит устройство расцепления летательного аппарата с шаром-зондом или аэростатом, управляемое датчиками измерительной аппаратуры.
Решение поставленной задачи - расширение функциональных возможностей системы достигается за счет новой взаимосвязи известных признаков и новых отличительных элементов. А именно, при данной конструкции системы измерение пространственных распределений параметров атмосферы производится как при подъеме, так и во время снижения ЛА (его возвращения) при планировании по заданной траектории. При этом одновременное соблюдение определенной математической зависимости параметров - скорости снижения от плотности воздуха и технических характеристик ЛА позволяет выполнить измерения в процессе снижения в режиме планирования в ее горизонтальной составляющей, что расширяет функциональные возможности системы измерения пространственных распределений параметров атмосферы при одновременной сохранности измерительной аппаратуры.
Изобретение характеризуется следующими графическими материалами.
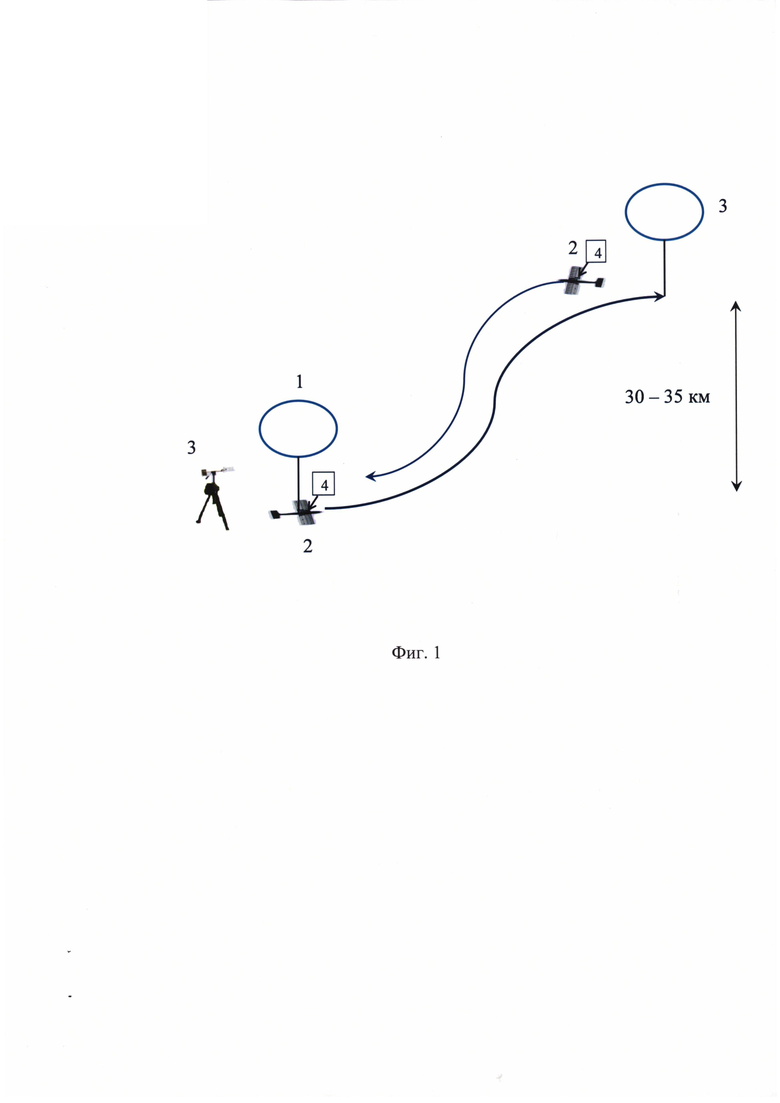
На фиг. 1 представлена условная схема заявленного изобретения (системы), где:
1 - шар-зонд;
2 - летательный аппарат;
3 - наземную станцию;
4 - бортовую измерительную аппаратуру.
На фиг. 2 представлена упрощенная блок-схема оборудования наземной станции, где:
5 - станция дистанционного управления с передающей антенной 6;
7 - приемник телевизионных сигналов с направленной антенной 8;
9 - дисплей для отображения видеоизображения и навигационных параметров.
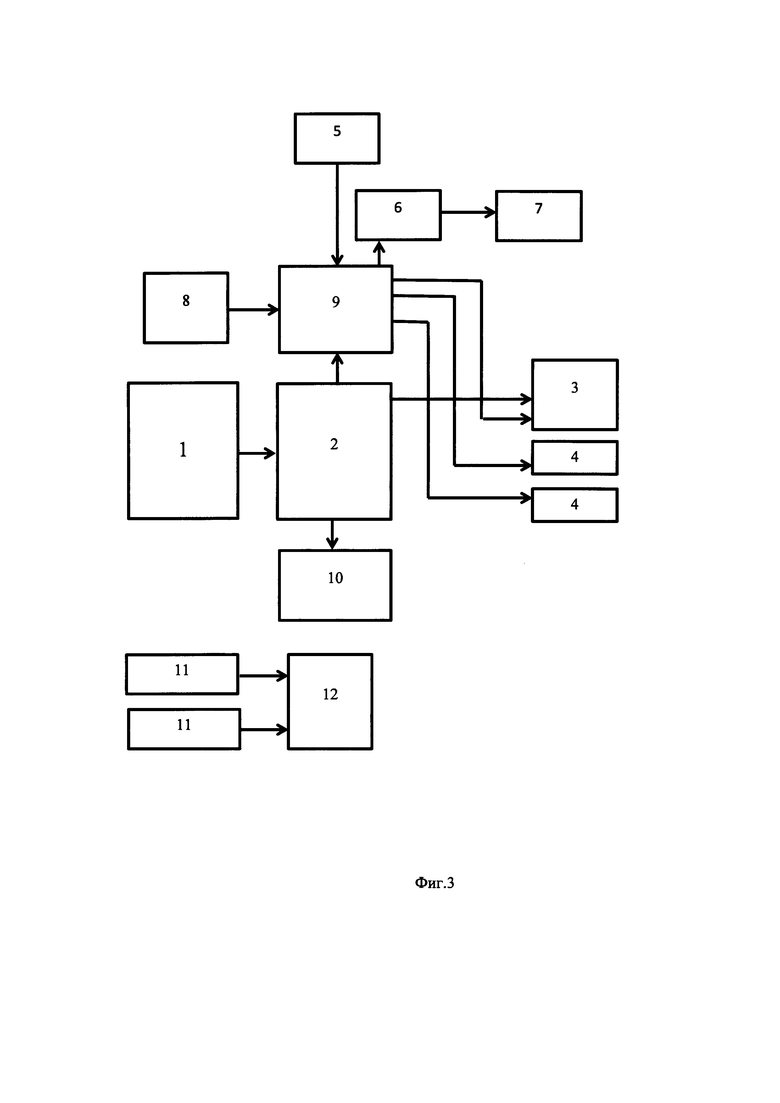
На фиг. 3 представлена упрощенная блок-схема бортовой измерительной аппаратуры, установленной на летательном аппарате, где:
10 - система дистанционного управления, включающая приемную антенну;
11 - приемник;
12 - регулятор мощности двигателя;
13 - севроприводы рулей;
14 - система видеоконтроля, включающая в себя бортовую видеокамеру;
15 - передатчик видеосигнала;
16 - передающая антенн;
17 - GPS модуль;
18 - OSD модуль для отображения параметров полета на экране дисплея наземной станции управления;
19 - система автопилотирования;
20 - система расцепления летательного аппарата от баллона;
21 - датчики температуры и давления;
22 - система сбора и обработки информации с картой памяти для записи результатов измерений.
На фиг. 4 представлена условная траектория полета летательного аппарата во время его подъема и спуска.
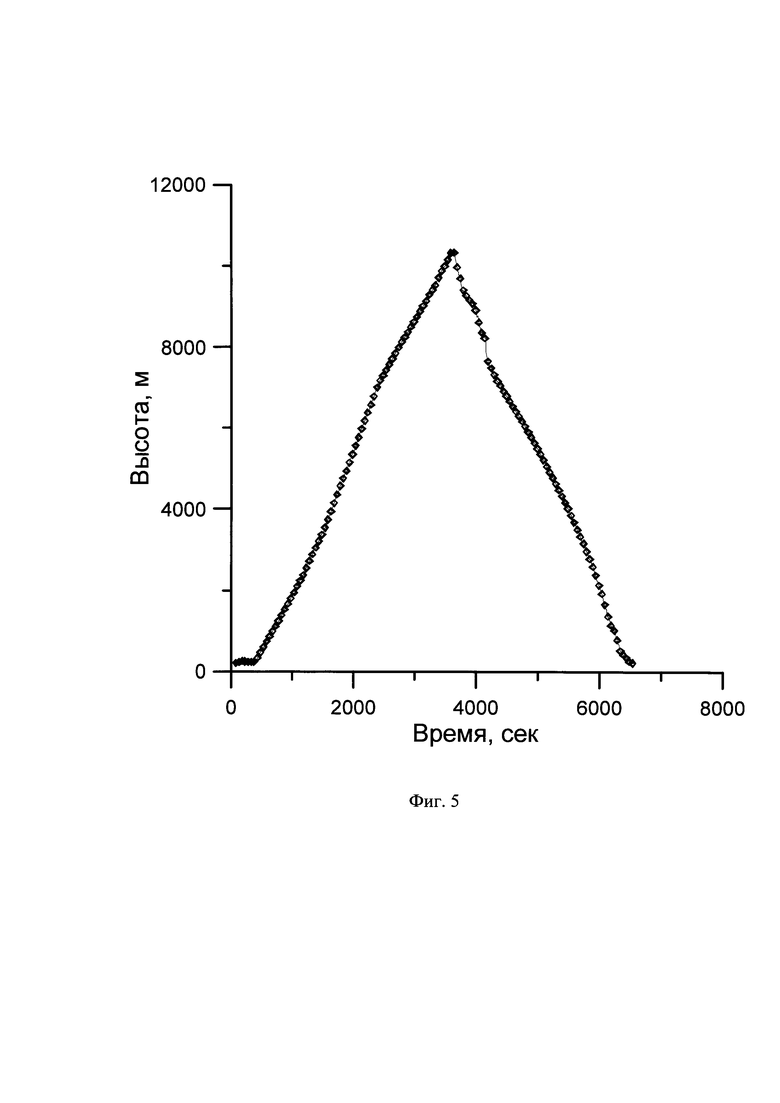
На фиг. 5 представлена кривая зависимости высоты полета ЛА от времени.
На фиг. 6 представлена кривая зависимости температуры от высоты.
Система работает следующим образом.
Шар-зонд (1) с прикрепленным к нему летательным аппаратом (2) с установленной на его борту измерительной аппаратурой (4) поднимается с земной поверхности на высоту 30-35 км. Пространственное измерение параметров атмосферы проводится как при подъеме на высотах до 35 км, так и на спуске ЛА. На заранее определенной высоте происходит отцепление самолета от шара-зонда по команде с наземной станции (3). Для этой цели с наземной станции (3) посылается специальный сигнал, который принимается бортовым приемником и преобразуется в электрический ток, протекающий через устройство расцепления ЛА и шара-зонда (1) и вызывающий его срабатывание. После срабатывания устройства расцепления летательный аппарат (2) отделяется от шара-зонда (1) и переходит в режим автономного полета в режиме планирования. В этом режиме летательный аппарат может либо дистанционно пилотироваться по команде с наземной станции, либо управляться системой автопилотирования, находящейся на его борту. При дистанционном пилотировании сигналы на управление летательным аппаратом подаются с наземной станции. Эти сигналы преобразуются в электрический ток, протекающий через приводы рулей и регулятор мощности двигателя. При автопилотировании сигналы управления задаются системой автопилотирования по программе, записанной в память микропроцессора, входящего в ее состав.
Измерения производятся как при подъеме, так и при снижении ЛА.
Пример конкретного выполнения 1.
С целью измерения пространственных распределений параметров атмосферы была использована система, в состав которой входили:
- шар-зонд (1), наполненный гелием, к которому был прикреплен сверхлегкий летательный аппарат (ЛА) (2) весом 10,8 Н с размахом крыльев 1,2 м и с грузоподъемностью 2,9 Н;
- на борту ЛА были установлена аппаратура для измерения давления и температуры;
- наземная станция для управления устройством расцепления и летательным аппаратом во время его полета после расцепления с шаром-зондом;
- устройство расцепления летательного аппарата с шаром-зондом, управляемое по команде с наземной станции.
Бортовое оборудование (Фиг. 3) летательного аппарата включало в себя:
- систему дистанционного управления, работающую на частоте 2,4 ГГц включающую приемную антенну (10), приемник (11), регулятор мощности двигателя (12) и сервоприводы рулей (13);
- систему видеоконтроля, включающую в себя бортовую видеокамеру (14), передатчик (15) видеосигнала мощностью 0,8 Вт, работающий на частоте 1160 МГц и передающую антенну (16);
- GPS модуль (17);
- OSD модуль для отображения параметров полета на экране дисплея наземной станции управления (18);
- систему автопилотирования (19);
- систему расцепления летательного аппарата от баллона (20);
- датчики температуры и давления (21);
- систему сбора и обработки информации с картой памяти для записи результатов измерений (22).
Данный летательный аппарат дистанционно пилотировался по видеоизображению, передаваемому на наземную станцию управления и видеоконтроля.
На мониторе наземной станции вместе с видеоизображением, передаваемым с борта летательных аппаратов, отображается следующая информация:
- текущие географические координаты ЛА;
- курс самолета;
- направление на ЛА с места взлета (необходимо для наведения антенны на земле);
- направление на место взлета (для облегчения спуска и возврата летательного аппарата);
- высота полета;
- скорость полета;
- удаление от места взлета;
- время полета;
- напряжение силовой бортовой батареи;
- величина принимаемого сигнала дистанционного управления.
Так как самолет был оснащен видеокамерами и передатчиками видеоизображения, которое передавалось на наземную станцию, его управление могло осуществляться и тогда, когда самолет находился вне пределов видимости. Навигационные параметры, такие как высота полета, координаты ЛА, направление и скорость движения, расстояние до наземной станции передавались на наземную станцию и накладывались на видеоизображение с помощью системы OSD. В качестве источника тяги на самолете был установлен электродвигатель. Скорость вращения пропеллера регулировалась по команде с наземной станции управления. ЛА прикреплялся к шару-зонду (баллону), наполненному гелием и был обеспечен системой расцепления. Расцепление самолета от шара-зонда производилось по команде с наземной станции управления. Оно также может быть осуществлено по команде, подаваемой при достижении требуемых параметров от каких-либо датчиков, установленных на борту летательного аппарата (давления, GPS высоты, таймера и т.д.).
Оборудование наземной станции (фиг. 2) включает в себя станцию дистанционного управления (5) с передающей антенной (6), приемник телевизионных сигналов (7) с направленной антенной (8) и дисплей для отображения видеоизображения и навигационных параметров (9).
Расцепление самолета (летательного аппарата) (2) от шара-зонда (1) производилось по команде с наземной станции. Скорость подъема шара-зонда (баллона) с самолетом составила около 4-5 м/с.
Для подъема самолета использован шар-зонд объемом 1,3 м3. Расцепление было произведено на высоте 2,5 км. Расстояние от наземной станции в этом случае составило около 6 км. Аппарат был возвращен в режиме дистанционного ручного управления с наземной станции в точку вылета.
При данной конструкции системы на борт летательного аппарата могут быть установлены стандартные метеорологические приборы подходящего веса и габаритов.
Пример конкретного выполнения 2.
Был использован летательный аппарат весом 23,5 не размахом крыльев 2,2 м и грузоподъемностью 9,8 Н.
Бортовое оборудование (фиг. 3) летательного аппарата включает в себя:
- систему дистанционного управления, работающую на частоте 2,4 ГГц включающую приемную антенну (10), приемник (11), регулятор мощности двигателя (12) и севроприводы рулей (13);
- систему видеоконтроля, включающую в себя бортовую видеокамеру (14), передатчик видеосигнала мощностью 0,8 Вт (15), работающий на частоте 1160 МГц и передающую антенну (16);
- GPS модуль (17);
- OSD модуль для отображения параметров полета на экране дисплея наземной станции управления (18);
- систему автопилотирования (19);
- систему расцепления летательного аппарата от баллона (20);
- датчики температуры и давления (21);
- систему сбора и обработки информации с картой памяти для записи результатов измерений (22).
Данный летательный аппарат мог дистанционно управляться по видеоизображению, передаваемому на наземную станцию управления и видеоконтроля. Он также мог управляться, как вариант, с помощью системы автопилотирования, установленной на борту.
На мониторе наземной станции вместе с видеоизображением, передаваемым с борта летательных аппаратов, отображалась следующая информация:
- текущие географические координаты ЛА;
- курс ЛА;
- направление на ЛА с места взлета (необходимо для наведения антенны на земле);
- направление на место взлета (для облегчения возврата летательного аппарата);
- высота полета;
- скорость полета;
- удаление от места взлета;
- время полета;
- напряжение силовой бортовой батареи;
- величина принимаемого сигнала дистанционного управления.
Так как ЛА был оснащен видеокамерами и передатчиками видеоизображения, которое передавалось на наземную станцию, его управление могло осуществляться и тогда, когда ЛА находился вне пределов видимости. Навигационные параметры, такие как высота полета, координаты летательного аппарата, направление и скорость движения, расстояние до наземной станции передавались на наземную станцию и накладывались на видеоизображение с помощью системы OSD. В качестве источника тяги на ЛА был установлен электродвигатель мощностью 700 Вт. Скорость вращения пропеллера могла регулироваться по команде с наземной станции управления. ЛА прикреплялся к шару-зонду, наполненному гелием. Самолет был обеспечен системой расцепления. Расцепление ЛА от шара-зонда производилось по команде с наземной станции управления. Оно также может быть осуществлено по команде, подаваемой при достижении требуемых параметров от каких-либо датчиков (давления, GPS высоты, таймера и т.д.).
Система автопилотирования, установленная на ЛА, позволяет производить автономный полет ЛА по траектории по заданной программе. Таким образом, летательный аппарат мог функционировать как в режиме дистанционного управления с наземной станции, так и в режиме автопилотирования. Режим автопилотирования включается по команде с наземной станции посредством линии связи. Он также включался автоматически в случае потери летательным аппаратом сигнала дистанционного управления. Программа автопилотирования определяла функцию возвращения летательного аппарата в точку вылета.
Траектории полета летательного аппарата во время его подъема и возвращения приведены на фиг. 4.
На фиг. 5 приведена кривая зависимости высоты полета как при подъеме, так и при снижении от времени. Верхняя точка соответствует моменту расцепления самолета с шаром-зондом.
В таблице 1 представлены численные данные высоты полета, времени и, соответственно, измеряемых параметров атмосферы.


На фиг. 6 приведена кривая зависимости температуры от высоты, измеренная во время полета.
В таблице 2 представлены численные данные высоты полета и температуры атмосферы.

В таблице 3 представлены расчетные данные скорости снижения и плотности воздуха на разных высотах, полученные из математической зависимости, приведенной в формуле изобретения.
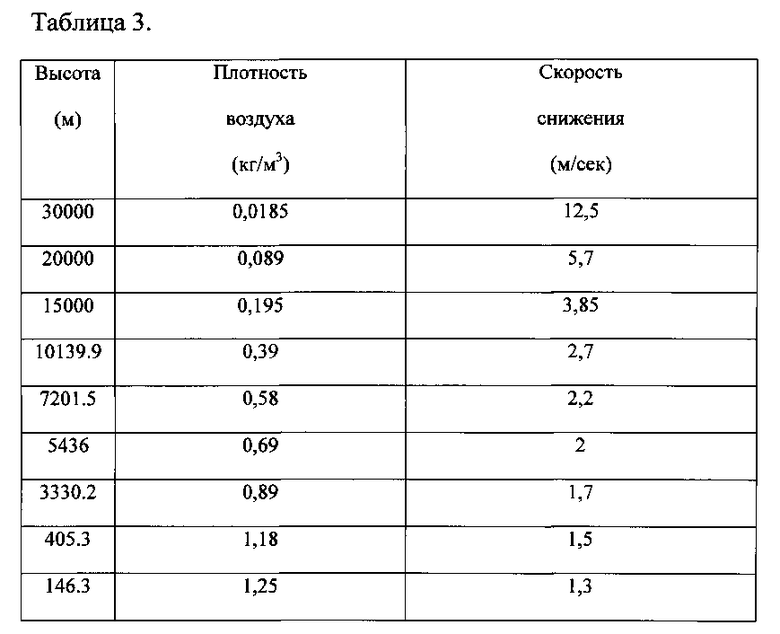
В таблице 4 представлена зависимость вертикальной скорости снижения летательного аппарата от тангенса угла планирования для коэффициента подъемной силы Cy=0,6, площади крыла ЛА S=0,35 м2, веса ЛА G=30 Н, плотности воздуха ρ=1,24 кг/м3.


Пример конкретного выполнения 3.
Аппаратура и оборудование, использованные в примерах конкретного выполнения 1 и 2, могут быть использованы для проведения измерений на высотах до 35 км. Именно до такой высоты проводятся измерения параметров атмосферы с помощью шаров-зондов во время аэрологического зондирования. За время подъема шар-зонд с прикрепленным к нему ЛА может удалиться от точки вылета на расстояние до 100 км. После расцепления ЛА в режиме автопилотирования возвращается в точку вылета. При обычной для данного типа ЛА скорости 50-100 км/час он достигнет точки вылета за 1-2 часа. Современные типы ЛА позволяют это реализовать доступными техническими средствами.
Осуществление технического решения в соответствии с предложенными материалами заявки в настоящее время реализуется на основе известных технических решений и может быть использовано в области метеорологии.
Выводы.
Возможность достижения технического результата обусловлена следующими причинами.
Измерения пространственных распределений параметров атмосферы проводятся как при подъеме, так и во время возвращения ЛА при планировании по заранее заданной траектории в ее горизонтальной составляющей, в частности, во время полета в режиме автоматического пилотирования или в режиме ручного дистанционного управления. Причем оптимальный режим измерения параметров атмосферы обеспечивается при соблюдении определенной зависимости скорости снижения (Vверт) от плотности воздуха (ρ) и характеристик летательного аппарата, при которой обеспечивается максимальная дальность планирования ЛА. Таким образом, использование предлагаемой системы позволит за счет возврата и многократного использования измерительной аппаратуры производить измерения параметров атмосферы на больших высотах, прежде всего, таких параметров, измерение которых в настоящее время проводится эпизодически. В частности, возможно проводить регулярные измерения газового и аэрозольного состава атмосферы, включая озоноактивные составляющие, парниковые газы, загрязняющие примеси и т.д., при этом проводятся измерения как вертикальных, так и горизонтальных распределений параметров атмосферы, концентрации газовых и аэрозольных примесей.
Возвращение измерительных приборов на наземную станцию за счет использования беспилотного летательного аппарата позволит значительно сократить затраты на проведение измерений параметров атмосферы. Особенно это касается контроля газового и аэрозольного состава, приборы, для измерения которых отличаются высокой стоимостью и не могут использоваться в качестве одноразовых измерителей, таких как радиозонды. Также можно осуществлять пробоотбор воздуха и аэрозолей на требуемых высотах с целью последующего анализа. Измерения с использованием ЛА могут проводиться и в темное время суток, так как это не препятствует работе системы автопилотирования и системы контроля навигационных параметров летательного аппарата. При правильной балансировке летательного аппарата мягкая посадка может быть обеспечена в режиме планирования с выключенным двигателем без участия оператора.
Для увеличения диапазона высот при проведении измерений параметров атмосферы система содержит шар-зонд, к которому с помощью шнура, имеющего устройство расцепления, прикреплен дистанционно пилотируемый летательный аппарат с установленной на борту измерительной аппаратурой. Управление полетом летательного аппарата после отцепления его от шара-зонда осуществляется как в режиме ручного управления с наземной станции по видеоизображению, передаваемому с борта летательного аппарата, так и в режиме автоматического пилотирования посредством автопилота с программой возврата в точку вылета. На борту летательного аппарата установлена система измерения навигационных параметров. На борту летательного аппарата также установлена видеокамера с передатчиком видеоизображения. Наземная станция включает в себя аппаратуру приема видеоизображения и систему управления летательным аппаратом. Вместе с видеоизображением осуществляется передача также навигационных параметров летательного аппарата, таких как координаты местонахождения, высота, направление и скорость полета и т.д. Источником тяги летательного аппарата (самолета) может быть электродвигатель, включаемый в момент расцепления летательного аппарата с аэростатом. С другой стороны, возврат летательного аппарата может быть осуществлен и в режиме планирования без использования источника тяги на борту летательного аппарата. Баллонные аэрологические шары-зонды, как правило, поднимаются на высоту 30-35 км. За время подъема дальность от наземной станции до ЛА может достигать 100 км.
Возвращение летательного аппарата при снижении в режиме планирования, выполняемое в режиме дистанционного ручного управления по заданному маршруту, позволит производить измерения не только вертикальных, но и горизонтальных распределений требуемых параметров, что расширит функциональные возможности системы измерения пространственных распределений параметров атмосферы.
Использование предлагаемой системы позволит проводить как тропосферные, так и стратосферные измерения пространственного распределения концентраций таких важных газовых составляющих, как озон, водяной пар, окислы азота, парниковые газы исследовать характеристики облаков, включая полярные стратосферные облака и т.д.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2010 |
|
RU2480728C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕРТИКАЛЬНЫХ РАСПРЕДЕЛЕНИЙ СКОРОСТИ И НАПРАВЛЕНИЯ ВЕТРА | 2018 |
|
RU2692736C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ НЕСАНКЦИОНИРОВАННОГО ИСПОЛЬЗОВАНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2002 |
|
RU2228543C2 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ КОМПЛЕКС ИССЛЕДОВАНИЯ ПОСАДОЧНЫХ СИСТЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ КОРАБЕЛЬНОГО БАЗИРОВАНИЯ | 1991 |
|
RU2042583C1 |
| СПОСОБ РАЗВЕРТЫВАНИЯ И ВЫСОТНОЙ ПОДВЕСКИ ИНФОРМАЦИОННОЙ СИСТЕМЫ И НЕСУЩИЙ АЭРОДИНАМИЧЕСКИЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2392188C1 |
| СПОСОБ И СИСТЕМА АНТЕННЫХ ИЗМЕРЕНИЙ С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОГО ПРИВЯЗНОГО АЭРОСТАТА | 2023 |
|
RU2818996C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |
| СПОСОБ РАЗМЕЩЕНИЯ ВЫСОТНОЙ ПЛАТФОРМЫ И ВЫСОТНАЯ ПЛАТФОРМА | 2012 |
|
RU2506204C1 |
| Способ подготовки дистанционных боевых действий | 2023 |
|
RU2812501C1 |
| СПОСОБ И КОМПЛЕКС СРЕДСТВ ОБНАРУЖЕНИЯ ЧРЕЗВЫЧАЙНОЙ СИТУАЦИИ И ЛИКВИДАЦИИ ЕЕ ПОСЛЕДСТВИЙ | 2004 |
|
RU2350368C2 |



Изобретение относится к области метеорологии и может быть использовано для измерения пространственных распределений параметров атмосферы. Сущность: система включает летательный аппарат (2) с измерительной аппаратурой (4) на борту, устройство (1) для транспортировки летательного аппарата в виде шара-зонда или аэростата, а также устройство управления полетом летательного аппарата. Измерительная аппаратура (4), установленная на борту летательного аппарата (2), соединена при помощи линии связи с наземной станцией (3). Скорость снижения летательного аппарата, при которой обеспечивается оптимальный режим измерения параметров атмосферы, рассчитывают с учетом плотности воздуха и характеристик летательного аппарата. Технический результат: возможность проведения измерений на высотах до 30 км и более, повышение сохранности измерительной аппаратуры. 4 з.п. ф-лы, 6 ил., 4 табл.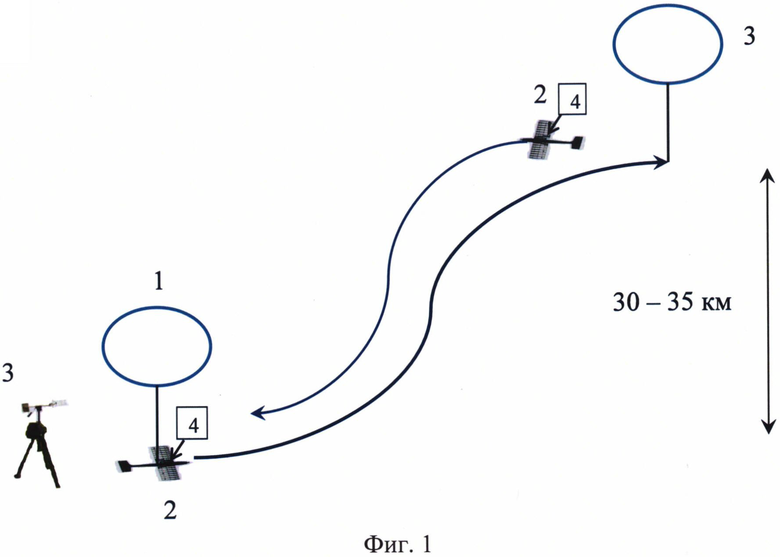
1. Система измерения пространственных распределений параметров атмосферы, включающая шар-зонд или аэростат, наполненные водородом или гелием, измерительную аппаратуру, соединенную при помощи линии связи с наземной станцией, отличающаяся тем, что система дополнительно содержит летательный аппарат (ЛА), закрепленный с шаром-зондом или аэростатом, и устройство управления полетом ЛА, при этом измерительная аппаратура установлена на борту летательного аппарата, а оптимальный режим измерения параметров атмосферы обеспечивается при следующей математической зависимости скорости снижения (Vверт) от плотности воздуха (ρ) и характеристик летательного аппарата:

где ρ - плотность воздуха (кг/м3), G - вес летательного аппарата (Н), S* - площадь крыла (м2), 1/k - тангенс угла планирования, Cy - коэффициент подъемной силы.
2. Система измерения пространственных распределений параметров атмосферы по п.1, отличающаяся тем, что устройство управления полетом установлено на летательном аппарате и выполнено в виде устройства автоматического пилотирования.
3. Система измерения пространственных распределений параметров атмосферы по п.1, отличающаяся тем, что устройство управления полетом летательного аппарата установлено на наземной станции.
4. Система измерения пространственных распределений параметров атмосферы по п.1, отличающаяся тем, что она содержит устройство расцепления летательного аппарата с шаром-зондом или аэростатом, управляемое посредством линии связи с наземной станции.
5. Система измерения пространственных распределений параметров атмосферы по п.1, отличающаяся тем, что она содержит устройство расцепления летательного аппарата с шаром-зондом или аэростатом, управляемое датчиками измерительной аппаратуры.
| DE 202004013613 U1, 16.12.2004 | |||
| Способ определения засухоустойчивости растений | 1974 |
|
SU512736A1 |
| СИСТЕМА АВИАЦИОННОГО ЭКОЛОГИЧЕСКОГО МОНИТОРИНГА ЗАГРЯЗНЕНИЯ АТМОСФЕРЫ В КРЕЙСЕРСКОМ ПОЛЕТЕ | 2005 |
|
RU2304293C1 |

