Изобретение относится к радиотехнике, а именно к прикладным вопросам эксплуатации радиотехнических средств (РТС), и может быть использовано для измерения уровней радиотехнической, радиолокационной и радиосвязной наблюдаемости, соответственно - радиотехнических, радиолокационных и радиосвязных средств морского (корабельного) и берегового базирования, а также при исследованиях рефракционных параметров тропосферы.
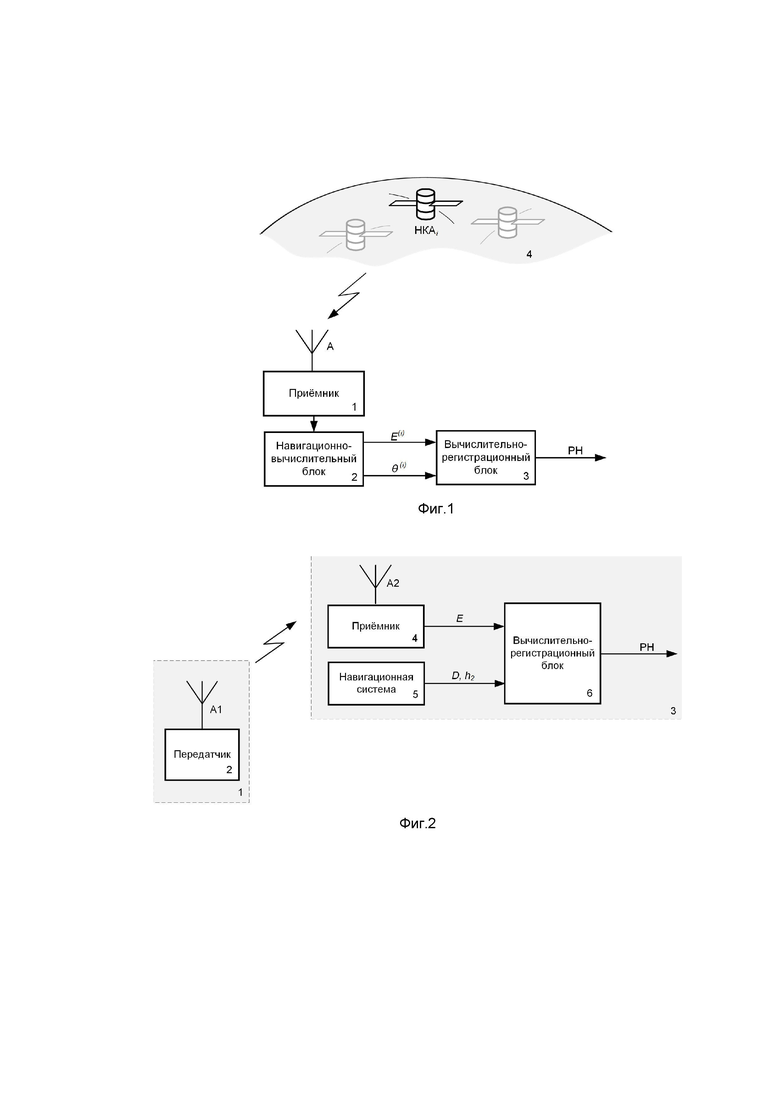
Сущность изобретения заключается в том, что в известном способе реализации интерференционного метода оценки уровня радионаблюдаемости (состоящего из источника СВЧ сигнала, антенны, приемника, навигационной системы и вычислительно-регистрационного блока) исключается носитель, источник СВЧ сигнала и навигационная система, а в качестве носителя и источника СВЧ сигнала побочным образом используется навигационный космический аппарат (НКА) из состава существующей глобальной навигационной спутниковой системы (ГНСС), излучающий навигационные сигналы. Устройство для измерения уровня радионаблюдаемости, состоящее из антенны, приемника, навигационно-вычислительного блока и вычислительно-регистрационного блока фиг.1. Причем навигационно-вычислительный блок осуществляет поиск и обнаружение сигнала, трехмерную фиксацию, обработку альманахов, критериальный выбор НКА, обработку эфемерид и амплитуды сигнала НКА, сопровождение НКА с выдачей относительных координат НКА и амплитуды сигнала в вычислительно-регистрационный блок.
Технический результат использования изобретения заключается в упрощении способа и структурного построения устройства, снижения эксплуатационных затрат.
Под радионаблюдаемостью (далее - РН) принято понимать величину отношения фактической дальности действия в конкретных условиях к формулярной дальности действия радиотехнического средства, обычно выражаемую в баллах. В общем случае из ряда внешних факторов, влияющих на РН, определяющим является атмосферная, а конкретно для наземных (морских, береговых) радиотехнических средств (РТС) - тропосферная рефракция [1]. Для учета рефракции можно использовать один из следующих параметров среды распространения (тропосферы): эквивалентный радиус земли, градиент показателя преломления, отношение радиуса кривизны луча к радиусу земли. Перечисленные параметры однозначно связанны друг с другом и видом рефракции, поэтому они могут использоваться для оценки уровня РН [2, с.264].
Известны модельно-метеорологические методы [3, с.99] измерения эффективного радиуса земли, а значит и уровня РН, основанные на наземных (надводных) измерениях первичных параметров атмосферы (влажности, температуры и давления) с помощью соответствующих датчиков. Далее расчетным методом определяется величина коэффициента преломления у поверхности земли, на основе которой с помощью известных моделей атмосферы (например - линейной, экспоненциальной, биэкспоненциальной, Хопфильда и иных моделей интерполяции высотного профиля атмосферы) восстанавливается вертикальный профиль коэффициента преломления и вычисляется эффективный радиус земли, а значит и уровень РН.
Недостатками данного метода и способов его реализации являются:
Оценка РН проводится в конкретной географической точке - точке измерения параметров атмосферы. Таким образом отсутствует возможность оценки РН в направлениях трассы распространения волн.
Используемые модели атмосферы могут не совпадать с реальным состоянием атмосферы, что вызывает погрешность измерения РН. В частности, модели не учитывают сложный характер вертикального профиля коэффициента преломления, например, наличия приподнятых и приземных волноводов.
Известен способ радиоакустического зондирования атмосферы [4] в котором излучается акустический пакет импульсов, который облучают электромагнитными посылками. По разности фаз и частот допплеровских смещений электромагнитных импульсов определяют высотный профиль влажности и температуры, а также вычисляют высотный профиль индекса преломления. На основе индекса преломления находится уровень РН.
Недостатком данного способа является то, что измерение уровня РН проводится в конкретной географической точке - точке проведения радиоакустического зондирования атмосферы. Таким образом отсутствует возможность измерения уровня РН в направлениях трассы распространения волн.
Известен метод градиентных метеорологических измерений (т. н. методы зондирования [5, 6]) и способы его реализации [7…13]. Метод основан на проведении прямых измерений высотных профилей первичных параметров атмосферы (влажности, температуры и давления) с помощью соответствующих метеорологических датчиков. Далее на основании измеренных высотных профилей расчетным методом восстанавливается рефракционные параметры атмосферы и рассчитывается уровень РН. При этом, по типу носителя датчиков различают способы: аэростатного, ракетного и авиационного (с использованием самолетов, вертолетов и БПЛА) зондирования, а также зондирование с помощью стационарного механического подъёмника. В случае наличия на борту носителя приемопередающей аппаратуры для радиопередачи сигналов с датчиков на наземный пункт обработки - данный вид зондирования называют радиозондированием. В отличие от модельно-метеорологического метода производится непосредственный замер высотного профиля параметров атмосферы, а не интерполяция его на основании одной из моделей атмосферы.
Недостатком данного метода и способов его реализации является:
Зондирование (а значит и оценка РН) проводится в конкретной географической зоне, ограниченной автономностью (временем полета) носителя, а также дальностью осуществления радиосвязи (при радиозондировании).
В связи с неуправляемым полетом при аэростатном и ракетном зондировании имеется ограниченная возможность по количеству съёмов высотного профиля. Это ограничивает возможности по измерению РН в направлениях трассы распространения волн, не совпадающих с зоной проведения зондирования.
При авиационном зондировании в зоне нахождения носителя происходит возмущение воздуха двигателями носителя, что вносит погрешность при восстановлении высотного профиля метрологических параметров.
При аэростатном и ракетном виде зондирования, в связи с воздействием ветровых возмущений на носитель, возникает погрешность в определении высотных профилей параметров атмосферы, а значит и РН.
При зондировании с помощью механического подъёмника зондирование производится в одной географической точке расположения данного подъёмника. Таким образом отсутствует возможность измерения РН в различных азимутальных направлениях трассы распространения волн.
Общим недостатком метода градиентных метеорологических измерений является инерционность метеорологических датчиков, а следовательно - значительное время проведения зондирования в процессе полета или перемещения датчиков.
Необходимость наличия инфраструктуры для эксплуатации носителей датчиков, что ограничивает возможности реализации методов, в частности для оценки РН морских (корабельных) РЛС. Например, для эксплуатации авиационных носителей необходимы взлетно-посадочные полосы (площадки), а также инфраструктура для хранения и обслуживания.
Известен способ определения усредненных значений показателя преломления воздуха (а значит и уровня РН), углов боковой и вертикальной рефракции и устройство для его реализации [14]. Сущность способа заключается в том, что определение усредненных значений градиента показателя преломления воздуха осуществляется на основе измерений вертикальной составляющей флюктуации угла прихода лазерного излучения в фокальной плоскости приемного объектива. Для реализации способа необходимо приемо-передающее лазерное устройство с возможностью фиксации угла прихода лазерного луча и т.н. «цель» - специализированный предмет или устройство (линза) с высоким коэффициентом отражения, стационарно находящийся на трассе распространения.
Недостатками данного способа являются:
Высокая погодозависимость способа от атмосферных осадков, связанная с использованием лазерного излучения.
Использование специализированного устройства (т.н. «цель») ограничивает возможность измерения РН в различных азимутальных направлениях трассы распространения волн, т.е. измерение уровня РН возможно лишь в азимутальном направлении расположения «цели».
Способ предназначен прежде всего для геодезических измерений [14]. Высокие значения поглощения и рассеяния лазерного излучения в атмосферных газах ограничивает дальность действия, а значит и возможность для оценки РН в направлениях трассы распространения волн.
Известен радиометрический метод [5] (и способы его реализации) при котором проводится экспериментальное исследование радиотеплового (радиояркостного) излучения системы атмосфера-море. Метод основан на проведении измерений угломестного профиля радиояркостной температуры, на основе которого расчетным методом восстанавливается коэффициент рефракции, а значит и измеряется уровень РН. В способах осуществления данного метода используются специализированные станция приема радиотеплового излучения и антенна, которая в общем случае имеет возможность ориентироваться в азимутальной плоскости, а значит оценивать уровень РН на трассах распространения в любом азимутальном направлении. Достоинством данного метода является оперативность измерений в связи с отсутствием применения датчиков параметров атмосферы и их носителей.
Недостатком данного метода и способов его реализации является:
Большая погрешность метода, связанная с размыванием радиояркостно-температурной границы сред атмосфера-море по причине взволнованности морской поверхности.
Необходимость наличия радиотеплового приёмного оборудования и антенны значительных размеров: так в [5, с.113] метод реализуется с помощью параболической антенны размерами около 3 м), что ограничивает возможности реализации метода для оценки РН корабельных РЛС.
Морское волнение приводит к качке корабля, а значит и антенны, приводящей к нестабильности её ориентации, что приводит к погрешности результатов измерений угломестного профиля радиояркостной температуры для средств корабельного базирования.
Известен метод оценки уровня рефракции (и способы его реализации) по величине ослабления в дифракционной зоне [5], при осуществлении которого производится измерения амплитуды СВЧ сигнала, излучаемого специализированным источником, отнесенного в дифракционную зону. Кроме непосредственно аппаратуры для приема сигнала, для реализации данного метода необходима информация о текущем положении источника СВЧ сигнала в пространстве (в частности, дальность и высота), а сам источник должен перемещаться определенным образом - по заданной траектории горизонтально. В результате перемещения источника аппаратура фиксирует амплитуду принимаемого сигнала и восстанавливает дифракционную зависимость амплитуды сигнала от дальности. На основе этой зависимости расчетным методом восстанавливается коэффициент рефракции, а значит и уровень РН. Благодаря использованию специализированного СВЧ источника сигнала, а не радиотеплового фона природного происхождения (как в радиометрическом методе), исключается влияние подстилающей поверхности на результаты измерения.
Недостатком данного метода и способов его реализации является
Необходимость наличия специализированного источника СВЧ сигнала и его носителя.
Необходимость наличия аппаратуры записи информации о положении источника СВЧ-сигнала или аппаратуры передачи этой информации на землю.
Необходимость наличия инфраструктуры для эксплуатации носителей, что ограничивает возможности реализации методов для оценки РН, например, корабельной РЛС.
Высокая погрешность измерения, определяемая ограниченным количеством измерений по причине малой протяженностью зоны рефракции в диапазоне СВЧ.
Высокая погрешность измерения в связи с сильным влиянием на результат погонного ослабления СВЧ сигнала в тропосфере.
Известен интерференционный метод оценки уровня рефракции [5], а значит и уровня РН (и способы его реализации), на основе анализа пространственного распределения интерференционного поля. При реализации метода производится оценка амплитуды СВЧ сигнала (приемником), излучаемого специализированным источником отнесенного в зону интерференции. Причем источник и приемник сигнала могут меняться местами в зависимости от удобства реализации и практических соображений, что не оказывает влияние на результат. Для реализации метода необходима информация о текущем положении источника СВЧ сигнала в пространстве, а сам источник должен перемещаться соответствующим образом - по заданной траектории. В результате перемещения источника наземная аппаратура фиксирует амплитуду принимаемого сигнала и восстанавливает интерференционную зависимость. На основе этих зависимостей расчетным методом восстанавливается коэффициент рефракции, а значит и уровень РН. Причем в отличии от метода оценки уровня рефракции по величине ослабления в дифракционной зоне, оценивается не зависимость погонного затухания от дальности, а пространственная форма интерференционных лепестков (максимумов либо минимумов), и таким образом исключается погрешность измерения уровня РН по причине ослабления СВЧ сигнала в атмосфере.
Способы реализации метода отличаются типом носителя. В качестве носителя используется либо авиационный носитель (самолет, вертолет, БПЛА), либо стационарное устройство, установленное на поверхности земли, обеспечивающее вертикальное перемещение источника. В частности, в [5, с.121] приводится реализация метода, в котором носителем является стационарная телескопическая мачта, с возможностью перемещения антенны приемника в вертикальной плоскости, расположенная на расстоянии 7,7 км. Способы реализации метода на основе стационарного носителя имеет следующие недостатки:
Отсутствие возможности измерения уровня РН в направлениях отличных от направления на стационарный носитель.
Протяжённость измерения уровня РН в направлении трассы ограничивается стационарным расположением носителя.
Высота, на которой возможно проведение анализа интерференционного поля ограниченна конструктивной высотой, механической прочностью и способностью противостоять ветровым нагрузкам стационарного носителя. Это снижает качество исследования интерференционного поля, а значит приводит к погрешности определения уровня РН.
Неприменимость в морских и береговых условиях (на морских трассах распространения) в связи со сложностью стационарного расположения носителя на морской поверхности.
Необходимость наличия специализированного источника СВЧ сигнала и его носителя.
Наиболее близким по технической сущности и достигаемому результату является способ реализации интерференционного метода оценки уровня рефракции (эффективного радиуса, уровня РН) с помощью авиационного носителя [5]. При реализации данного способа амплитуда принимаемого излучения ( ) от наземного источника 1 (включающего передатчик 2 и антенну А1) регистрируется приемным устройством (состоящим из антенны А2 и приемника 4), установленным на авиационном носителе 3 фиг.2. Информация о текущем положении носителя относительно источника (в частности, текущие дальность
) от наземного источника 1 (включающего передатчик 2 и антенну А1) регистрируется приемным устройством (состоящим из антенны А2 и приемника 4), установленным на авиационном носителе 3 фиг.2. Информация о текущем положении носителя относительно источника (в частности, текущие дальность  и высота полета
и высота полета  ) выдается навигационной системой 5 в вычислительно-регистрационный блок 6 для обработки совместно с текущей величиной амплитуды . В результате перемещения носителя 3 в направлении трассы распространения в вычислительно-регистрационном блоке 6 фиксируются напряженность интерференционного поля, определяются направления характерных точек (например, минимумов сигнала) и далее, на основании известной высоты полета, определяется эффективный радиус или уровень РН. При необходимости полет осуществляется в ином азимутальном направлении и на любой высоте. В данном способе источник сигнала располагается на поверхности, а приемник на носителе.
) выдается навигационной системой 5 в вычислительно-регистрационный блок 6 для обработки совместно с текущей величиной амплитуды . В результате перемещения носителя 3 в направлении трассы распространения в вычислительно-регистрационном блоке 6 фиксируются напряженность интерференционного поля, определяются направления характерных точек (например, минимумов сигнала) и далее, на основании известной высоты полета, определяется эффективный радиус или уровень РН. При необходимости полет осуществляется в ином азимутальном направлении и на любой высоте. В данном способе источник сигнала располагается на поверхности, а приемник на носителе.
Согласно теореме (принципу) взаимности, взаимно-обратное расположение источника и приемника сигнала допускается и не оказывает влияние на результат. Однако в случае авиационного носителя обратное взаимное расположение менее удобно с практической точки зрения, т.к. в этом случае информацию об текущей амплитуде сигнала () и о текущем взаимном расположении источника и приемника (определяемую величинами , ) необходимо накапливать отдельно (соответственно на земле и на носителе) и далее обрабатывать специальным образом.
Расчет величины эффективного радиуса  (на основании которой рассчитывается уровень РН) в вычислительно-регистрационном блоке происходит следующим образом [5, с.120]: в процессе горизонтального полета измеряются дальности
(на основании которой рассчитывается уровень РН) в вычислительно-регистрационном блоке происходит следующим образом [5, с.120]: в процессе горизонтального полета измеряются дальности  на которых фиксируются
на которых фиксируются  -е интерференционные минимумы сигнала, а затем графическим либо расчетным способом согласно (1) определяется величина эквивалентного радиуса земли
-е интерференционные минимумы сигнала, а затем графическим либо расчетным способом согласно (1) определяется величина эквивалентного радиуса земли  . На основании найденной величины вычисляется искомое значение РН.
. На основании найденной величины вычисляется искомое значение РН.
 , (=1, 2,…), где (1)
, (=1, 2,…), где (1)
 и - высоты расположения корреспондирующих пунктов: антенны наземного источника и авиационного носителя соответственно,
и - высоты расположения корреспондирующих пунктов: антенны наземного источника и авиационного носителя соответственно,
 - длина волны источника сигнала,
- длина волны источника сигнала,
Первый множитель выражения (1) является интерференционным множителем и является прямым следствием упрощенной формулы Введенского [15], второй - учитывает влияние рефракции, задается графически в [16] или [17, с.102], причем:
учитывает влияние рефракции, задается графически в [16] или [17, с.102], причем:
 , где - расстояние между приёмником и передатчиком;
, где - расстояние между приёмником и передатчиком;
 .
.
Рефракционные явления в тропосфере оказывают действенное влияние на несколько (обычно до 3-х) первых интерференционных лепестков. Поэтому в процессе вычисления величины по (1) анализу подвергаются несколько первых интерференционных минимумов, т. е. =1…3.
Данный способ был принят за прототип.
Основным недостатком прототипа являются:
Необходимость наличия специализированного источника СВЧ сигнала и его носителя.
Необходимость наличия инфраструктуры для эксплуатации носителей, что ограничивает возможности реализации методов для оценки РН, например, для корабельных РЛС.
Целью (техническим результатом) изобретения является упрощение способа и структуры устройства для измерения уровня РН, а также снижение эксплуатационных затрат при реализации способа.
Цель (технический результат) достигается тем, что в качестве специализированного источника и его носителя используется навигационный космический аппарат (НКА) из состава развернутой (действующей) группировки ГНСС [18, 19, 20], излучающий навигационные сигналы в диапазоне СВЧ. Причем информация о координате НКА вырабатывается на основе обработки навигационного сигнала. Таким образом исключается необходимость в источнике сигнала, в носителе и инфраструктуре для его эксплуатации, а также в аппаратуре обеспечивающей информацией о положении носителя (источника). Отсутствие специализированного источника сигнала и его носителя, а также отсутствие необходимости в инфраструктуре для эксплуатации носителя снижает затраты на эксплуатацию и реализацию устройства.
Способ и устройство объединены единым изобретательским замыслом, основанным на общем принципе выполнения измерений и общем принципе расчета измеряемой величины.
Сущность изобретения и принцип работы поясняется чертежом фиг.1, на котором приведена структурная схема устройства для реализации способа измерения уровня РН.
Устройство состоит из приемной антенны А, приёмника 1, навигационно-вычислительного блока 2 и вычислительно-регистрационного блока 3. Приёмное устройство (состоящее из антенны А и приемника 1) осуществляет прием сигналов НКА из состава космической группировки ГНСС 4. Навигационно-вычислительный блок 2 вырабатывает цифровые сигналы содержащие информацию об амплитуде  и угле места
и угле места  сопровождаемого спутника HKAi из состава группировки 4. Далее на основе данной информации в вычислительно-регистрационном блоке 3 фиксируется зависимость
сопровождаемого спутника HKAi из состава группировки 4. Далее на основе данной информации в вычислительно-регистрационном блоке 3 фиксируется зависимость  , на основании которой вычисляется уровень РН.
, на основании которой вычисляется уровень РН.
Приведем обоснование, поясняющее реализуемость изобретения, технические особенности устройства для его реализации и алгоритм его работы.
НКА из состава ГНСС, развернутых на орбите, являются средневысотными спутниками земли, орбита которых не является стационарной. Это позволяет каждый НКА рассматривать как подвижный источник, осуществляющий движение в том числе и в зоне интерференции приемного устройства.
Антенна А и приемник 1 фиг.1 для приема сигналов НКА являются типовыми устройствами большинства навигационных приемников (навигаторов), техническая реализация которых на данный момент тривиальна.
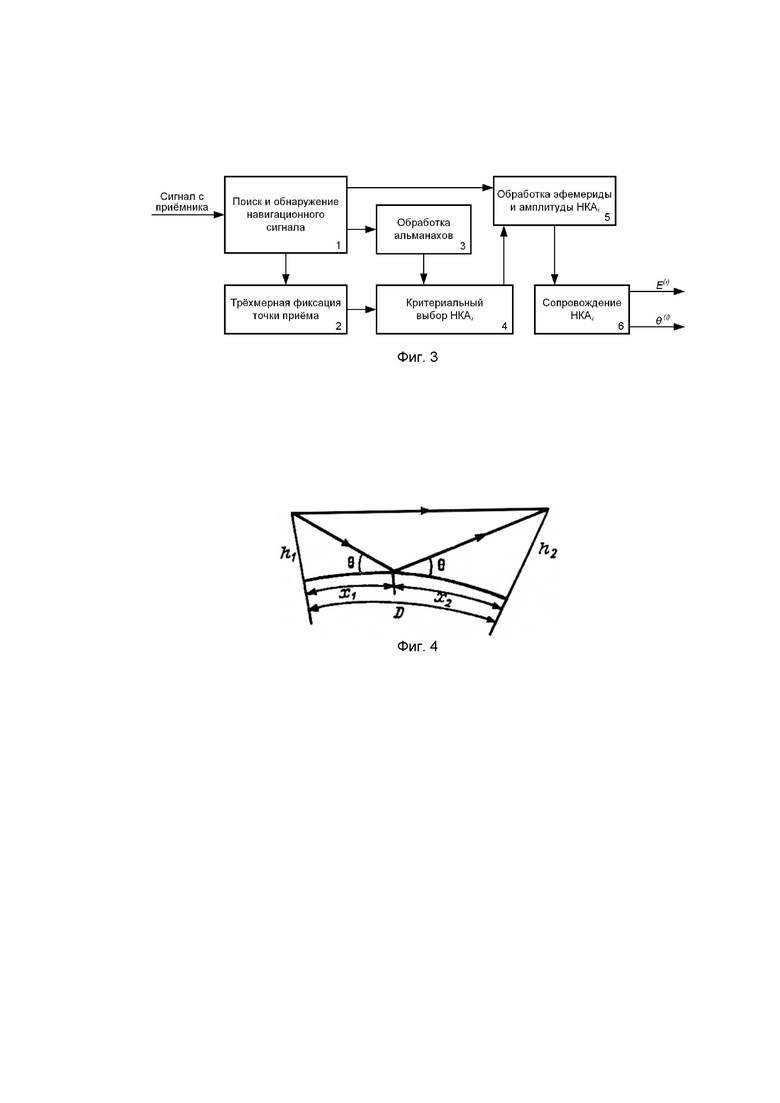
Алгоритм работы навигационно-вычислительного блока 2 поясняется блок-схемой приведенной на фиг.3. Сигналы с НКА с выхода приемника поступают на функциональный блок 1 в котором осуществляется поиск, обнаружение и оцифровка полезных сигналов. Оцифрованные сигналы поступают в функциональные блоки 2 и 3 в которых осуществляется трехмерная фиксация точки приема (решается навигационная задача определения координат точки приема) и обработка альманахов для определения приближённых параметров орбиты и координат НКА из состава группировки ГНСС. Далее на основе известных координат точки приема, а также параметров орбиты и координат НКА в блоке 4 производится критериальный выбор одного из НКА. Затем в блоке 5 для выбранного НКА определяется точное значение угломестной координаты относительно точки приёма на основе полученных эфемерид. Выходными информационными сигналами навигационно-вычислительного блока являются амплитуда сигнала в точке прима и угломестная координата НКА относительно точки приема. Функциональные блоки 1, 2, 3, 5 являются типовыми блоками большинства навигационных приемников (навигаторов), техническая реализация которых тривиальна. Задачи, решаемые функциональными блоками 4 и 6 являются типовыми задачами систем автоматического управления и сбора данных, поэтому также технически реализуемы.
В вычислительно-регистрационном блоке 3 фиг. 1 проводится вычисление уровня РН, техническая реализуемость обосновывается нижеизложенными математическими выкладками.
Известно, что напряженность поля от движущегося источника в момент радиозахода (либо радиовосхода) имеет сложную (интерференционную) структуру, определяемую выражением [2]:
 , где (2)
, где (2)
 - напряженность сигнала в свободном пространстве (нормирующим множитель);
- напряженность сигнала в свободном пространстве (нормирующим множитель);
 - нормированная диаграмма направленности приемника;
- нормированная диаграмма направленности приемника;
 - коэффициент, описывающий влияние волнения моря в функции средних квадратических высот морских волн
- коэффициент, описывающий влияние волнения моря в функции средних квадратических высот морских волн  , волнового числа
, волнового числа  и угла скольжения
и угла скольжения  ;
;
 - комплексный коэффициент отражения Френеля для морской поверхности;
- комплексный коэффициент отражения Френеля для морской поверхности;
 - коэффициент, характеризующий сферическую расходимость волн;
- коэффициент, характеризующий сферическую расходимость волн;
 .
.
Смысл величин  ,
,  , , и их взаимосвязь поясняется на фиг.4 , причем и - высоты расположения корреспондирующих пунктов приема и передачи: антенны наземного приемника и носителя (НКА) соответственно.
, , и их взаимосвязь поясняется на фиг.4 , причем и - высоты расположения корреспондирующих пунктов приема и передачи: антенны наземного приемника и носителя (НКА) соответственно.
В реальных условиях форма и положение интерференционных лепестков меняется в зависимости от уровня рефракции, определяемой величиной  . Путь поводится наблюдение сигнала на входе приемника . Тогда величина , соответствующая максимальной степени коррелированности функций и найденной по (2) функции
. Путь поводится наблюдение сигнала на входе приемника . Тогда величина , соответствующая максимальной степени коррелированности функций и найденной по (2) функции  , является искомой величиной, на основании которой находится уровень РН.
, является искомой величиной, на основании которой находится уровень РН.
По аналогии со способом-прототипом, возможно нахождения уровня РН выявлением характерных точек зависимости , а именно - интерференционных минимумов. В предлагаемом способе, как и в способе-прототипе, дальность на которой фиксируется -й интерференционный минимум, будет следующей:
 =1, 2,…), (3)
=1, 2,…), (3)
Данное выражение аналогично выражению (1) и справедливо для  . В ином случае следует пользоваться дифракционными формулами.
. В ином случае следует пользоваться дифракционными формулами.
Вычислительно-регистрационный блок, осуществляющий вычисление уровня РН на основании вышеприведенных математических выражений, как и подобный ему блок приведенный в описании прототипа, может быть реализован в современном микропроцессорном исполнении или на базе электронной вычислительной машины.
Алгоритм работы устройства для реализации изобретения может быть следующим:
1. Обнаружение полезных сигналов с НКА;
2. Трехмерная фиксация точки приема сигнала;
3. Определение приближённых параметров орбиты и координат НКА из состава группировки ГНСС на основе альманахов;
4. Критериальный выбор НКА по результатам пп 2..3;
5.Определение значения угломестной координаты выбранного НКА относительно точки приёма на основе эфемерид;
6. Вычисление амплитуды сигнала с НКА 
7.Фиксация (построение) зависимости на основе данных по пп 5 и 6;
8. Проверка условия достижения предельных координат НКА. Если условие не достигнуто - переход к п. 5;
9.Вычисление уровня РН на основе зависимости ;
10. Переход к п. 3.
Испытания опытного экземпляра устройства показали высокую степень корреляции (согласно [21, 22]) результатов измерения уровня РН и результатов работы радиотехнических и радиолокационных станций.
Вследствие влияния на результаты измерений уровня РН множества случайных факторов предложенный способ характеризуется некоторой погрешностью измерений. Случайная составляющая погрешности измерения уровня РН предложенного способа может быть минимизирована усреднением результатов измерений уровня РН [23] по нескольким НКА развёрнутых ГНСС. Таким образом снижается погрешность измерения уровня РН.
Источники информации
1. Бин Б. Р., Даттон Е. Дж. Радиометеорология. - Л.: Гидрометеоиздат, 1971. - 364 с.
2. Черный Ф. Б. Распространение радиоволн. - М.: Советское радио, 1962. - 480 с.
3. Давыденко Ю. И. Дальняя тропосферная связь. - М.: Военное издательство, 1968. - 212 с.
4. Патент RU2196345C2 Российская Федерация, МПК G01S 13/95. Способ радиоакустического зондирования атмосферы / Ульянов Ю. Н., Бутакова С. В., Скворцов В. С., Ветров В. И.; заявитель и патентообладатель Акционерное общество открытого типа «Латан». - № 2000112085/09; заявл. 17.05.2000; опубл. 10.01.2003, Бюл. № 1.
5. Михайлов Н. Ф., Рыжков А. В., Щукин Г. Г. Радиометеорологические исследования над морем. - Л.: Гидрометеоиздат, 1990. - 208 с.
6. Павлов Н.В. Аэрология, радиометеорология и техника безопасности. - Л.: Гидрометеоиздат, 1980. - 432 с.
7. Патент RU2529177C1 Российская Федерация, МПК G01S 13/95. Система радиозондирования атмосферы с пакетной передачей метеорологической информации / Иванов В. Э., Гусев А. В., Плохих О. В.; заявитель и патентообладатель Общество с ограниченной ответственностью «Научно-производственное предприятие «ОРТИКС». - № 2013107302/07; заявл. 19.02.2013; опубл. 27.09.2014, Бюл. № 27.
8. Патент RU2041476C1 Российская Федерация, МПК G01W 1/08. Способ оперативного исследования атмосферы, земной поверхности и океана / Анфимов Н. А., Цыбульский Г. А., Гордеев С. П., Смирнов Н. А., Киселев Л. Н., Мельянков Н. А., Философов В. С., Плечов В. А., Керцелли Г. М., Кармазин В. П., Катушкин В. Ю.; заявитель и патентообладатель Центральный научно-исследовательский институт машиностроения; заявл. 17.08.1992; опубл. 09.08.1995.
9. Патент RU2172969C1 Российская Федерация, МПК G01W 1/08. Артиллерийский метеорологический комплекс / Буев Е. М., Денежкин Г. А., Макаровец Н. А., Нейман Ю. В., Немтинов В. А., Обозов Л. И., Семилет В. В., Смирнов В. Н., Трифонов Д. А., Феклистов В. В.; заявитель и патентообладатель Федеральное государственное унитарное предприятие «Вектор». - № 2000128571/28; заявл. 17.11.2000; опубл. 27.08.2001, Бюл. № 24.
10. Патент RU2125282C1 Российская Федерация, МПК G01W 1/08. Бикалиберная метеорологическая ракета / Кузнецов В. М., Коммисаренко А. И.; заявитель и патентообладатель Конструкторское бюро приборостроения. - № 96113158/28; заявл. 21.06.1996; опубл. 20.01.1999.
11. Патент RU2576023C1 Российская Федерация, МПК G01S 13/95. Унифицированная система радиозондирования атмосферы / Иванов В. Э., Гусев А. В., Плохих О. В., Кудинов С. И.; заявитель и патентообладатель Общество с ограниченной ответственностью «Научно-производственное предприятие «ОРТИКС». - № 2014132374/07; заявл. 05.08.2014; опубл. 27.02.2016, Бюл. № 6.
12. Патент RU2480791C2 Российская Федерация, МПК G01S 19/14, G01W 1/00. Метеорологическая система / Иванов В. Э., Гусев А. В., Плохих О. В.; заявитель и патентообладатель Иванов В. Э., Общество с ограниченной ответственностью «Научно-производственное предприятие «ОРТИКС». - № 2011105829/07; заявл. 16.02.2011; опубл. 27.08.2012, Бюл. № 24.
13. Патент RU2295142C1 Российская Федерация, МПК G01W 1/08. Способ оперативного исследования атмосферы, земной поверхности и океана / Заренков В. А., Заренков Д. В., Дикарев В. И., Доронин А. П.; заявитель и патентообладатель Заренков В. А., Заренков Д. В., Дикарев В. И., Доронин А. П. - № 2005126400/28; заявл. 10.08.2005; опубл. 10.03.2007, Бюл. № 7.
14. Патент RU2382985C2 Российская Федерация, МПК G01C 1/00. Способ определения усредненных значений показателя преломления воздуха, углов боковой и вертикальной рефракции и устройство для его реализации / Дементьев В. Е., Дементьев Д. В.; заявитель и патентообладатель Дементьев В. Е., Дементьев Д. В. - № 2007141188/28; заявл. 08.11.2007; опубл. 27.02.2010, Бюл. № 6.
15. Долуханов М. П. Распространение радиоволн. - М.: Связьиздат, 1952. - 492 с.
16. Распространение ультракоротких радиоволн / Под ред. Б. А. Шиллерова. - М.: Советское радио, 1954. - 710 с.
17. Долуханов М. П. Распространение радиоволн. - М.: Связь, 1965. - 400 с.
18. ГЛОНАСС. Принципы построения и функционирования / Под. ред. А. И. Петрова, В. Н. Харисова. изд. 4-е, перераб. и доп. - М.: Радиотехника, 2010. - 800 с.
19. Глобальная спутниковая навигационная система ГЛОНАСС // Интерфейсный контрольный документ. Общее описание системы с кодовым разделением каналов. Редакция 1.0. - Москва, 2016.
20. NAVSTAR GPS Space Segment/Navigation User Segment Interfaces. Interface specification № IS-GPS-200, 2019.
21. Наследов А. SPSS 19: профессиональный статистический анализ данных. - СПб.: Питер, 2011. - 400 с.
22. Наглядная математическая статистика: учебное пособие / М. Б. Лагутин. - 2-е изд., испр. - М.: БИНОМ. Лаборатория знаний, 2009. - 472 с.
23. Рабинович С. Г. Погрешности измерений. - Л.: Энергия, 1978. - 262 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЭПИЦЕНТРАЛЬНОЙ ЗОНЫ ИСТОЧНИКА И СКОРОСТИ РАСПРОСТРАНЕНИЯ ПЕРЕМЕЩАЮЩИХСЯ ИОНОСФЕРНЫХ ВОЗМУЩЕНИЙ | 2014 |
|
RU2560525C1 |
| СПОСОБ ЗОНДИРОВАНИЯ ИОНОСФЕРЫ, ТРОПОСФЕРЫ, ГЕОДВИЖЕНИЙ И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2502080C2 |
| Реактивный снаряд для измерения уровня радионаблюдаемости | 2020 |
|
RU2743332C1 |
| Многофункциональная система радиозондирования атмосферы | 2016 |
|
RU2626410C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ АВРОРАЛЬНОГО ОВАЛА И СОСТОЯНИЯ МАГНИТНОГО ПОЛЯ ЗЕМЛИ | 2015 |
|
RU2601387C1 |
| Способ определения коэффициентов погонного ослабления сигналов навигационных космических аппаратов в лесном массиве с координатной привязкой | 2018 |
|
RU2682718C1 |
| МЕТЕОРОЛОГИЧЕСКАЯ СИСТЕМА | 2011 |
|
RU2480791C2 |
| МНОГОРЕЖИМНЫЙ АЭРОЛОГИЧЕСКИЙ КОМПЛЕКС | 2019 |
|
RU2710965C1 |
| НАВИГАЦИОННАЯ СИСТЕМА ЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2015 |
|
RU2613153C1 |
| СПОСОБ ЗОНДИРОВАНИЯ ПЛАЗМЕННОГО СЛОЯ ГЕОМАГНИТНОГО ХВОСТА И ИОНОСФЕРЫ ЗЕМЛИ | 2017 |
|
RU2656617C1 |
Группа изобретений относится к средствам измерения уровня радионаблюдаемости. Сущность: обнаруживают полезные сигналы от навигационно-космических аппаратов (НКА), излучающих навигационные сигналы, из состава одной или нескольких развернутых глобальных навигационных спутниковых систем. Выполняют трехмерную фиксацию точки приема сигнала. Определяют приближенные параметры орбиты и координат НКА на основе альманахов. Осуществляют критериальный выбор НКА. Определяют значение угломестной координаты выбранного НКА относительно точки приема на основе эфемерид. Вычисляют амплитуду сигнала с НКА. Строят зависимость вычисленной амплитуды сигнала от угломестной координаты. Проверяют условие достижения предельных координат НКА. Вычисляют уровень радионаблюдаемости на основе построенной зависимости амплитуды сигнала от угломестной координаты. Устройство для измерения уровня радионаблюдаемости содержит антенну (А) и приемник (1) для приема сигналов с навигационных космических аппаратов глобальной навигационной спутниковой системы, навигационно-вычислительный блок (2) для измерения амплитуды и взаимного расположения навигационных космических аппаратов и приемника, вычислительно-регистрационный блок (3) для вычисления уровня радионаблюдаемости. В качестве источника сигнала используется навигационный космический аппарат из состава развернутой глобальной навигационной спутниковой системы. В навигационно-вычислительном блоке (2) производится поиск и обнаружение навигационного сигнала, трехмерная фиксация точки приема, обработка альманахов, критериальный выбор навигационных космических аппаратов, обработка эфемерид и амплитуды сигнала навигационных космических аппаратов, сопровождение навигационных космических аппаратов с выдачей относительных координат навигационных космических аппаратов и амплитуды сигнала в вычислительно-регистрационный блок (3). Технический результат: упрощение средств измерения уровня радионаблюдаемости. 2 н. и 1 з.п. ф-лы, 4 ил.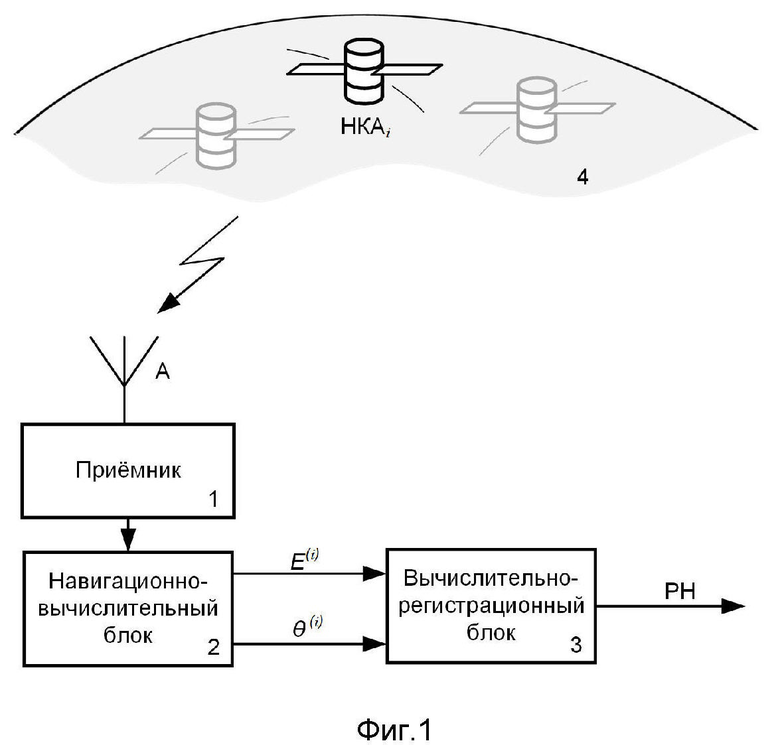
1. Способ измерения уровня радионаблюдаемости, заключающийся в обнаружении полезных сигналов от навигационно-космических аппаратов (НКА), излучающих навигационные сигналы, из состава одной или нескольких развернутых глобальных навигационных спутниковых систем, трехмерной фиксации точки приема сигнала, определении приближенных параметров орбиты и координат НКА на основе альманахов, критериальном выборе НКА, определении значения угломестной координаты выбранного НКА относительно точки приема на основе эфемерид  , вычислении амплитуды сигнала с НКА
, вычислении амплитуды сигнала с НКА  , построении зависимости
, построении зависимости  , проверке условия достижения предельных координат НКА, вычислении уровня радионаблюдаемости на основе зависимости .
, проверке условия достижения предельных координат НКА, вычислении уровня радионаблюдаемости на основе зависимости .
2. Способ по п. 1, отличающийся тем, что в случае использования навигационных аппаратов из состава нескольких глобальных навигационных спутниковых систем результаты измерения уровня радионаблюдаемости усредняются.
3. Устройство для измерения уровня радионаблюдаемости, содержащее антенну и приемник для приема сигналов с навигационных космических аппаратов глобальной навигационной спутниковой системы, навигационно-вычислительный блок для измерения амплитуды и взаимного расположения навигационных космических аппаратов и приемника, вычислительно-регистрационный блок для вычисления уровня радионаблюдаемости, отличающееся тем, что в качестве источника сигнала используется навигационный космический аппарат из состава развернутой (существующей) глобальной навигационной спутниковой системы, а в навигационно-вычислительном блоке производится поиск и обнаружение навигационного сигнала, трехмерная фиксация точки приема, обработка альманахов, критериальный выбор навигационных космических аппаратов, обработка эфемерид и амплитуды сигнала навигационных космических аппаратов, сопровождение навигационных космических аппаратов с выдачей относительных координат навигационных космических аппаратов и амплитуды сигнала в вычислительно-регистрационный блок.
| В.Н | |||
| Быстров и др | |||
| К вопросу оценки эффективности применения спутниковых навигационных систем с учётом возможного затенения спутников / Навигация и гидрография, 2007, N 24, стр | |||
| Нивелир для отсчетов без перемещения наблюдателя при нивелировании из средины | 1921 |
|
SU34A1 |
| Устройство для обнаружения загрязнения рабочих поверхностей магнитной головки и магнитной ленты | 1987 |
|
SU1619336A1 |
| СПОСОБ ПОЛУЧЕНИЯ АЛКИЯЕНКАРБОНАТ | 0 |
|
SU172342A1 |

