Изобретение относится к железнодорожной автоматике, в частности, к микропроцессорной системе централизации, предназначенной для централизованного управления стрелками, светофорами и другими объектами на железнодорожных станциях, перегонах.
В настоящее время для организации движения поездов, маневровой работы и обеспечения безопасности движения, железнодорожные станции оборудованы, в основном, различными системами релейной электрической централизации (ЭЦ), объектами управления и контроля которых являются:
- стрелки, электрические рельсовые цепи, светофоры и их совокупность;
- переезды, маневровые колонки или вышки;
- устройства УКСПС;
- средства оповещения работающих на путях и стрелочных переводах;
- устройства ограждения составов.
В уровне техники широко известны системы (ЭЦ-ЕМ, МПЦ-МПЛ, МПЦ-И).
Данные централизации позволяют наравне с удаленным управлением контролировать соблюдение технологии перевозочного процесса и являются информационной основой для контроля технологической дисциплины.
Технической проблемой заявленного изобретения является расширение арсенала средств определенного назначения с обеспечением технического результата, заключающегося в реализации назначения, который достигается в микропроцессорной системе централизации объектов железнодорожной автоматики и телемеханики состоящая из по меньшей мере одного автоматизированного рабочего места дежурного, содержащего средства диагностики состояния и ввода команд управления объектами железнодорожной автоматики и телемеханики в реальном масштабе времени, управляющего вычислительного компьютера, соединенного с по меньшей мере одним автоматизированным рабочим местом дежурного, устройства ввода-вывода для сопряжения управляющего компьютера с объектами железнодорожной автоматики и телемеханики, электронных устройств управления и контроля, осуществляющих непосредственный контроль и управление объектами нижнего уровня локальной железнодорожной автоматики и телемеханики, отличающийся тем, что по меньшей мере одно автоматизированное рабочее место дежурного включено в состав подсистемы местного и/или удаленного управления и наблюдения, содержащей также автоматизированные рабочие места эксплуатационного персонала, управляющий вычислительный компьютер включен в состав подсистемы центрального процессора, имеющей горячий резерв, состоящий из двух синхронизированных процессорных устройств, и выполненной с возможностью определения состояния объектов контроля и управления, а также с возможностью формирования управляющих команд для подсистемы объектных контроллеров на изменение состояния контролируемых объектов, а электронные устройства управления и контроля, осуществляющие непосредственный контроль и управление объектами нижнего уровня локальной железнодорожной автоматики и телемеханики, входят в состав подсистемы объектных контроллеров, представляющей собой интерфейс для напольного оборудования, при этом данная подсистема выполнена с возможностью приема управляющих сигналов от подсистемы центрального процессора, а также с возможностью осуществления непрерывного контроля объектов контроля и управления, передачи актуальной фактической информации в подсистему центрального процессора.
Отличительной особенностью является также то, что микропроцессорная система централизации объектов железнодорожной автоматики и телемеханики содержит подсистему защиты от несанкционированного доступа и проникновения вредоносных программ, выполненную с возможностью взаимодействия со всеми указанными подсистемами.
Указанный технический результат достигается микропроцессорной системой централизации МПЦ-ЭЛ, состоящей из:
- подсистемы центрального процессора, состоящей из, по меньшей мере, двух (основного и резервированного) процессорных модулей (каналов) с блоками питания и коммутации для каждого. При этом допускается увеличение производительности системы путем добавления дополнительных управляющих компьютеров (ЦП);
- устройств ввода-вывода (УВВ) для сопряжения с устройствами управления и контроля объектами;
- подсистемы объектных контроллеров, содержащих устройства управления и контроля (УУК) объектами автоматики нижнего уровня - стрелками, светофорами и т.п.; напольного оборудования (НО) объектов автоматики нижнего уровня (стрелок, светофоров, рельсовых цепей, переездов и т.д.);
- подсистемы местного и/или удаленного управления и наблюдения, содержащей помимо автоматизированного рабочего места оператора;
- устройство управления и контроля дежурного по станции (ДСП), который образует автоматизированное рабочее место - АРМ ДСП;
- устройств электропитания (УП);
- средств защиты от несанкционированного доступа и проникновения вредоносных программ (КСПК-ЭЛ).
Подсистемы местного и/или удаленного управления и наблюдения обеспечивает преобразование мнемонических команд, вводимых оператором в инструкции, распознаваемые центральным процессором. Кроме этого данная подсистема, получая от центрального процессора индикационные переменные, преобразует их в мнемоническую индикацию на рабочем месте понятную оператору. Также данная подсистема обеспечивает получение, преобразование и отображение диагностической информации о состоянии и работоспособности системы.
Подсистема центрального процессора воспринимает инструкции от АРМ, определяет на их основе требуемое состояние объектов контроля и управления, оценивает возможность приведения объектов контроля и управления в требуемое состояние, в соответствии с правилами организации движения и фактической поездной обстановкой (расчет зависимостей) и формирует приказы для подсистемы объектных контроллеров на изменение состояния контролируемых объектов. С другой стороны, подсистема центрального процессора принимает информацию о фактическом состоянии объектов контроля и управления и диагностическую информацию от подсистемы объектных контроллеров с целью актуализации информации о состоянии контролируемого объекта и информировании оператора. Также подсистема контролирует фактическое время и актуальность информации.
Подсистема объектных контроллеров, которая является интерфейсом для напольного оборудования, воспринимает приказы от подсистемы центрального процессора и в соответствии с ними переводит контролируемое оборудование в необходимое состояние. С другой стороны, подсистема объектных контроллеров осуществляет непрерывный контроль объектов контроля и управления и передает актуальную, фактическую информацию (статусы и диагностическую информацию) в подсистему центрального процессора.
Подсистема защиты взаимодействует со всеми подсистемами, на всех уровнях и, не влияя на выполнение функций по прямому назначению, обеспечивает контроль имеющихся узлов подключения и их активность, информируя о несанкционированных и/или вредоносных подключениях, которые могут привести к нарушению работы всей системы.
К функциям централизации, выполняемым предложенной системой, относятся: дистанционное централизованное управление стрелками, светофорами и другими объектами напольного оборудования на железнодорожных станциях с целью организации движения поездов, а также контроль состояния технических средств, участвующих в процессе осуществления и управления движения поездов, выдача дежурному по станции (ДСП) оперативной, архивной и нормативно-справочной информации, а также формирование протоколов работы устройств (событий и состояний) и действий персонала, контроля состояния объектов железнодорожной автоматики и управления состоянием объектов, диагностики технического состояния устройств, самодиагностики аппаратуры, протоколирование работы системы, контроля и управления системой в диалоговом режиме, что значительно улучшает эксплуатационные показатели работы участков железных дорог, повышает безопасность движения поездов.
Применение микропроцессорной системы централизации МПЦ-ЭЛ позволяет организовать удаленное управление смежными станциями, а также реализовать функции систем интервального регулирования автоматической блокировки (АБ), полуавтоматической блокировки (ПАБ), автоматической локомотивной сигнализации (АЛСО).
Система МПЦ-ЭЛ оборудуется средствами повышения защиты от несанкционированного доступа и проникновения вредоносных программ, что становится особенно актуально на сегодняшний день для всех компьютеризированных систем управления.
Комплекс устройств системы, кроме напольного оборудования, может располагаться как централизованно на посту ЭЦ, так и распределено, например, в транспортабельных модулях, в зависимости от примененных проектных решений и решаемых функциональных задач.
Микропроцессорная система централизации может масштабироваться путем подключения дополнительных рабочих мест, управляющих компьютеров и устройств управления объектами нижнего уровня, обеспечивая функции централизации по контролю и управлению стрелками, светофорами и другими объектами железнодорожной автоматики и телемеханики с соблюдением требований безопасности движения поездов в соответствии с принципами, принятыми в существующих устройствах интервального регулирования для объектов различного размера и технического оснащения.
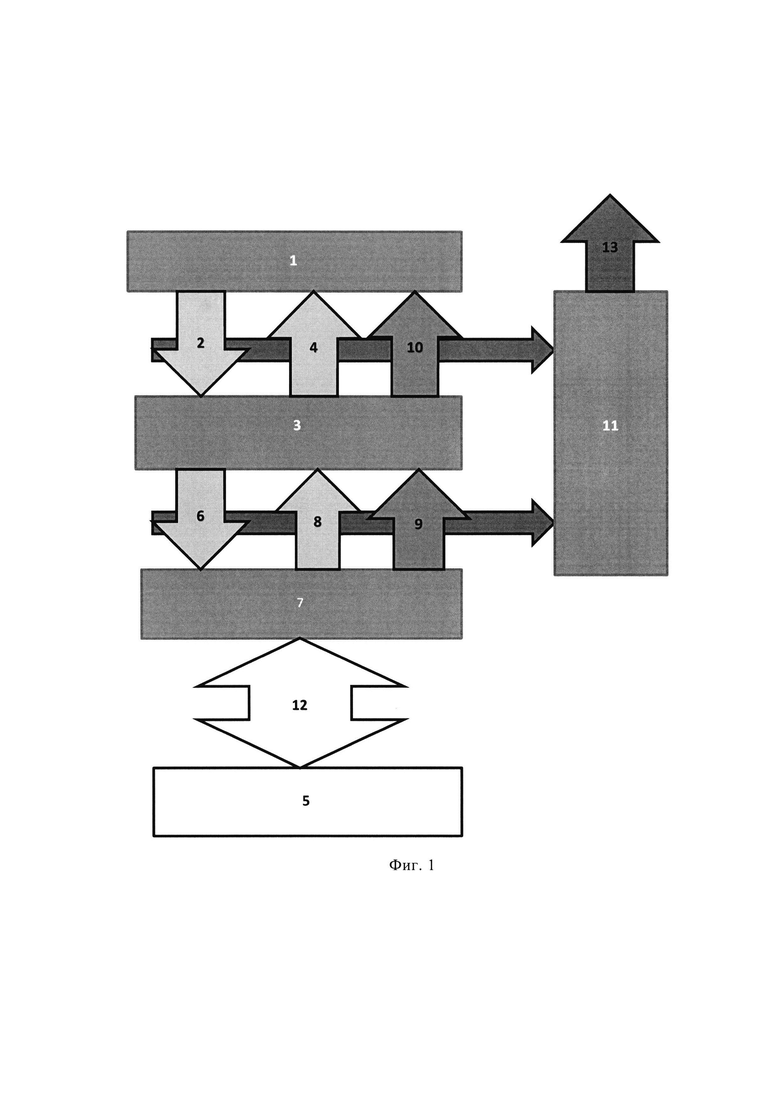
Микропроцессорная централизация МПЦ-ЭЛ имеет трехуровневую структуру и представлена на фиг. 1:
- верхний уровень является уровнем взаимодействия «оператор - система» и представляет собой подсистему местного и/или удаленного управления и наблюдения (ПМУН) (1), содержит автоматизированные рабочие места дежурного по станции и обслуживающего персонала, содержащие средства ввода команд для управления объектами железнодорожной автоматики и телемеханики, диагностики состояния объектов железнодорожной автоматики и телемеханики, преобразование мнемонических команд вводимых оператором в управляющие команды (2), распознаваемые подсистемой центрального процессора (3), а также преобразование индикационных переменных (4), получаемых от центрального процессора (3) в мнемоническую индикацию на рабочем месте оператора, обеспечивающую отображение состояния объектов контроля и управления (5) и диагностической информации (10);
- уровень обработки информации содержит подсистему центрального процессора (3) с горячим резервированием, обеспечивающий выполнение функций централизации с маршрутными зависимостями по состоянию объектов железнодорожной автоматики и телемеханики и/или управление стрелками, светофорами и другими объектами железнодорожной автоматики и телемеханики. Данная подсистема принимает сигналы (2) от АРМ, определяет на их основе состояние объектов контроля и управления, оценивает возможность приведения объектов контроля и управления (5) в требуемое состояние, в соответствии с правилами организации движения и фактической поездной обстановкой (расчет зависимостей) и формирует приказы (6) для подсистемы объектных контроллеров (7) на изменение состояния контролируемых объектов. Кроме того, подсистема центрального процессора (3) принимает информацию о фактическом состоянии (8) объектов контроля и управления (5) и диагностическую информацию (9) от подсистемы объектных контроллеров (7) с целью актуализации информации о состоянии контролируемого объекта и информировании оператора;
- нижний уровень управления и контроля объектами железнодорожной автоматики и телемеханики, состоящий из устройств управления и контроля (5), являющихся подсистемой объектных контроллеров (ПОК) (7), является интерфейсом для напольного оборудования, принимает управляющие команды (6) от подсистемы центрального процессора (3) и, в соответствии с ними, переводит контролируемое оборудование в необходимое состояние, формируя электрические сигналя (12). Кроме того, ПОК (7) осуществляет непрерывный контроль объектов контроля и управления (5) и передает актуальную фактическую информацию (статусы (8), диагностическую информацию (9)) в ПЦП (3). Архитектура технических средств системы микропроцессорной системы централизации МПЦ-ЭЛ представляет собой комплекс составных частей, позволяющий создавать любые конфигурации системы в соответствии с конкретным проектом станции, системы автоблокировки, или их комбинаций с последующей переконфигурацией при изменении путевого развития, в случае необходимости.
Время представления информации об изменениях состояния контролируемых объектов (от момента времени возникновения этого изменения до момента времени появления соответствующего отображения на экране монитора) не превышает 1,8 с.
Верхний уровень информационного обеспечения может содержать автоматизированное рабочее место дежурного по станции (АРМ ДСП) и, в случае необходимости, инженера СЦБ (АРМ ШН), серверы баз данных и приложений с функциями отображения процесса движения поездов, диагностики состояния объектов и нормативно-справочной информации, а также дополнительные устройства сопряжения с информационными системами различного назначения. Диалоговая подсистема должна обеспечивать полное отображение информации и взаимодействие ДСП и инженеров СЦБ с системой, а также связь с вышестоящими системами.
Автоматизированные рабочие места дежурного по станции (АРМ ДСП) и инженера СЦБ (АРМ ШН) обеспечивают отображение состояния объектов контроля и управления, позволяют вести сбор и обработку диагностической информации о техническом состоянии устройств автоматики на станции, прогнозировать появление отказов и оптимизировать процесс технического обслуживания. Помимо этого, АРМ ДСП формирует задачи по управлению объектами в диалоговом режиме, в реальном масштабе времени (без проверки зависимостей и условий безопасности -ответственные команды), а также ведение и чтение архива событий.
Ввод команд управления на всех АРМ ДСП осуществляется с помощью стандартных средств вычислительной техники (алфавитно-цифровой клавиатуры, манипуляторов типа «мышь»).
Контроль состояния объектов на станции и прилегающих перегонах и поездной ситуации осуществляется по изображению на мониторах.
Ввод команд управления производится с исключением несанкционированного доступа.
Системные блоки дежурного по станции (АРМ ДСП), инженера СЦБ (АРМ ШН) и связь с системами удаленного мониторинга организована с использованием оборудования Ethernet и протокола TCP/IP.
Допустимое время реакции системы на воздействия на устройства ввода информации АРМ (клавиатура, манипулятор) не превышает 0,5 с.
Общее время передачи команд управления от АРМ ДСП до исполнительных устройств не превышает 1 с.
Для повышения надежности работы системы можно использовать дополнительные АРМ ДСП. Тогда управление производится с одного из АРМ ДСП, находящегося в режиме управления, другой в этом случае находится в резерве. Для расширения функциональности системы могут быть организованы дополнительные рабочие места, например, управления маневровыми районами, отдельными парками станции, табло коллективного пользования и т.п.
Команды с АРМ ДСП поступают и обрабатываются на уровне логической обработки информации управляющим вычислительным компьютером подсистемы центрального процессора (3), построенном на базе управляющего компьютера, который обеспечивает выполнение функций по централизации и блокировке стрелок и сигналов с целью обеспечения высокой пропускной способности станции при необходимых условиях безопасности.
ПЦП (3) представляет комплекс процессорных устройств, обеспечивающий установку, замыкание и размыкание маршрутов на станции при соблюдении требований безопасности движения поездов путем проверки выполнения требуемых взаимозависимостей программно-аппаратными средствами, с обеспечением горячего резервирования.
Управляющий компьютер выполнен на базе модулей существующего специализированного компьютера для реализации системы централизации.
Управляющий компьютер располагается на посту электрической централизации в релейном или отдельном помещении, или транспортабельном модуле.
Аппаратная часть управляющего компьютера размещается в 19'' компьютерных шкафах и состоит из следующих элементов и составных частей:
- 19'' крейт для установки модулей компьютера;
- модули источников питания компьютера;
- модули процессоров компьютера централизации;
- модули обмена данными и хранения информации;
- модули связи;
- коммутационные соединения.
Шкаф представляет собой металлический каркас со съемными боковыми стенками, выполненные из листовой стали. На переднюю и заднюю стороны устанавливаются двери из листового метала, передняя дверь компьютерного шкафа оборудована прозрачным смотровым окном.
В шкафу устанавливаются 19'' крейт для установки модулей компьютера, модули источников питания компьютера, модули процессоров компьютера централизации, модули обмена данными и хранения информации, модули связи, устройства защиты от перенапряжений, оборудование связи, коммутационные клеммы, элементы крепления коммутационных кабелей.
Процессорное ядро управляющего компьютера состоит из двух функционально идентичных модулей и имеет структуру «два из двух» с диверсифицированным программным обеспечением и представлением данных.
Процессорное ядро управляющего компьютера состоит из двух функционально идентичных модулей и имеет структуру «два из двух» с обеспечением горячего резервирования и с диверсифицированным аппаратным и программным обеспечением и представлением данных, внутри ядер, с целью обеспечения уровня полноты безопасности 4 (УПБ 4 по ГОСТ Р МЭК 61508 -1-7-2012).
Модули процессорного ядра выполняют обработку данных по алгоритмам технологического (логика обеспечения зависимостей централизации) и системного программного обеспечения.
На фронтовой панели модуля процессорного ядра располагаются органы локального управления, коммутации и индикации.
Структура «два из двух» представляет собой два независимых идентичных по конструкции и программному обеспечению, с учетом диверсификации, процессорных модуля, которые синхронизируются аппаратно-программным способом.
В каждый процессорный модуль вводятся идентичные данные с точки зрения логического представления, но диверсифицированные в своем физическом представлении.
Результаты обработки и промежуточных вычислений в процессорных модулях сравниваются в двух независимых каналах, и принимается решение о выдаче команды на устройства управления.
Проверка каналов проводится циклически, в фоновом режиме. При расхождении результатов работы процессорных модулей или обнаружении сбоев диагностики процессорные модули переводятся в безопасный режим, а система переходит на работу комплекта, находившегося в горячем резерве. При этом время переключения составляет не более 0,6 секунды.
Такая структура процессора централизации позволяет сохранять полнофункциональную работоспособность управляющего компьютера даже при выходе из строя одного процессорного модуля, а также выявить и отключить неисправный процессорный модуль по результатам вычислений в процессе их сравнения.
Управляющие воздействия в системе МПЦ-ЭЛ осуществляются через подсистему объектных контроллеров (7) - уровень безопасного интерфейса ввода/вывода, выполненного в виде устройств ввода/вывода (объектных контроллеров), которые обеспечивают непосредственное управление и контроль объектами автоматики нижнего уровня (стрелочные переводы, светофоры, релейные интерфейсы и т.п.).
Устройства ввода/вывода являются специализированными контроллерами, с диверсифицированным программным обеспечением, для непосредственного управления аппаратурой нижнего уровня. Существует три типа устройств ввода/вывода для: управления/контроля стрелочных приводов, управления/контроля светофорами и управления/контроля релейных элементов.
Для получения достоверной информации о состоянии объектов, которые непосредственно влияют на безопасность движения поездов и управления ими, применена двухканальная диверсифицированная схема ввода данных (двухканальный вход с представлением информации с применением модифицированного кода Хемминга).
Реализация принципа заключается в том, что при считывании информации с входов модуля анализируется состояние обоих входов двуканального входа.
Каналы должны представлять информацию в соответствии с принципами диверсификации, в противном случае вход считается неисправным.
При двухканальном управлении команда воспринимается только при корректном приказе управления, полученном от двух каналов управления одновременно.
Источники питания системы запитываются от первичного источника переменного тока (УП), обеспечивающего выбор фидера питания, и аварийного питания при пропадании входного напряжения на фидерах.
Программное обеспечение МПЦ-ЭЛ содержит данные о путевом развитии станции, алгоритмы и программы, реализующие функции системы. Технические алгоритмы и процедуры, составляющие математическое обеспечение системы, не зависят от путевого развития станции. Привязка математического обеспечения к конкретной станции выполняется в процессе проектирования, на уровне технологического объектно-ориентированного ПО.
Обмен данными в системе и вне ее происходит посредством технических средств АРМ, в состав которых могут входить:
- АРМ дежурного по станции (с резервированием);
- АРМ инженера СЦБ.
АРМ ДСП или выделенный сервер содержит архивный сервер приложений и баз данных, предназначенный для контроля за технологическим процессом на станции.
Обмен информацией с ПЦП осуществляется через сеть TCP-IP. Для защиты информации от искажений и поддержания целостности структур данных в случае непредвиденных помех используется подсчет контрольной суммы по алгоритму CRC-8, CRC-16 и учет порядковых номеров всех входящих и исходящих пакетов.
Используя сеть TCP-IP микропроцессорная система централизации МПЦ-ЭЛ имеет возможность организации взаимодействия с соответствующими программно-аппаратными средствами ЖАТ верхнего уровня, обеспечивающими безопасность движения поездов (диспетчерской централизации), информационными системами (АСУ крупной станции и т.п.), а также с одноуровневыми СЖАТ - автоблокировкой, полуавтоматической блокировкой. Для обеспечения требований информационной безопасности внешние системы должны подключаться через устройства комплексной системы повышения киберзащищенности (11) (КСПК-ЭЛ) (13), обеспечивающей требования информационной безопасности и соответствующей требованиям безопасности движения поездов.
В маршрутном режиме управления микропроцессорная система централизации обеспечивает установку поездных и маневровых маршрутов, открытие светофоров, ограждающего данный маршрут, при обеспечении всех условий безопасности путем проверки необходимых взаимозависимостей и взаимного замыкания стрелок и светофоров.
В режиме индивидуального управления система обеспечивает индивидуальное управление объектами (стрелки, светофоры и т.д.) с проверкой всех зависимостей, относящихся к данному объекту.
Программное обеспечение МПЦ-ЭЛ содержит всю необходимую информацию по выполнению взаимозависимостей и привязке к конкретному объекту.
Кроме того, необходимо отметить, что заявленная микропроцессорная система централизации МПЦ-ЭЛ реализована в соотвествии с ГОСТ Р МЭК 61508 -1-7-2012 с УПБ не ниже 4 уровня или EN 50129, EN 50128, EN 50126 с уровнем не ниже SIL 4. Для построения системы применялись специализированные аппаратные и программные решения. Изъятие или замена какой-либо подсистемы приведет к прекращению функционирования всей системы по ее назначению.
| название | год | авторы | номер документа |
|---|---|---|---|
| МИКРОПРОЦЕССОРНАЯ СИСТЕМА ЦЕНТРАЛИЗАЦИИ МПЦ-ЭЛ | 2017 |
|
RU2709068C1 |
| Система микропроцессорной централизации стрелок и сигналов МПЦ-И | 2023 |
|
RU2794389C1 |
| МИКРОПРОЦЕССОРНАЯ СИСТЕМА ЦЕНТРАЛИЗАЦИИ СТРЕЛОК И СИГНАЛОВ | 2011 |
|
RU2495778C2 |
| СИСТЕМА МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ (МАЛС) | 2008 |
|
RU2369509C1 |
| МОДУЛЬНЫЙ ВОССТАНОВИТЕЛЬНЫЙ ПУНКТ СИГНАЛИЗАЦИИ, ЦЕНТРАЛИЗАЦИИ И БЛОКИРОВКИ | 2019 |
|
RU2747520C1 |
| СИСТЕМА ГОРОЧНОЙ МИКРОПРОЦЕССОРНОЙ ЦЕНТРАЛИЗАЦИИ (ГМЦ) | 2017 |
|
RU2648488C1 |
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ КРУПНЫХ ЖЕЛЕЗНОДОРОЖНЫХ СТАНЦИЙ | 2009 |
|
RU2403162C1 |
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ СОРТИРОВОЧНЫХ СТАНЦИЙ | 2009 |
|
RU2401217C1 |
| Станционное устройство системы маневровой автоматической локомотивной сигнализации, интегрированной с микропроцессорной централизацией железнодорожной станции | 2022 |
|
RU2780257C1 |
| СИСТЕМА ГОРОЧНОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ С ИСПОЛЬЗОВАНИЕМ РАДИОКАНАЛА (ГАЛС Р) | 2005 |
|
RU2303542C1 |
Изобретение относится к железнодорожной автоматике для централизованного управления объектами железнодорожной автоматики и телемеханики. Система включает по меньшей мере одно АРМ дежурного в составе подсистемы местного и/или удаленного управления и наблюдения, также содержащей АРМ эксплуатационного персонала, управляющий вычислительный компьютер, включенный в состав подсистемы центрального процессора, выполненной с возможностью определения состояния объектов контроля и управления с возможностью формирования управляющих команд для подсистемы объектных контроллеров на изменение состояния контролируемых объектов, процессорное ядро управляющего компьютера состоит из двух функционально идентичных модулей и имеет структуру «два из двух» с обеспечением горячего резервирования, а электронные устройства управления и контроля, осуществляющие непосредственный контроль и управление объектами нижнего уровня локальной железнодорожной автоматики и телемеханики, входят в состав подсистемы объектных контроллеров, представляющей собой интерфейс для напольного оборудования. Достигается возможность обеспечения микропроцессорной централизации объектов железнодорожной автоматики и телемеханики. 1 з.п. ф-лы, 1 ил.
1. Микропроцессорная система централизации объектов железнодорожной автоматики и телемеханики, состоящая из по меньшей мере одного автоматизированного рабочего места дежурного, содержащего средства диагностики состояния и ввода команд управления объектами железнодорожной автоматики и телемеханики в реальном масштабе времени, управляющего вычислительного компьютера, соединенного с по меньшей мере одним автоматизированным рабочим местом дежурного, устройства ввода-вывода для сопряжения управляющего компьютера с объектами железнодорожной автоматики и телемеханики, электронных устройств управления и контроля, осуществляющих непосредственный контроль и управление объектами нижнего уровня локальной железнодорожной автоматики и телемеханики, отличающаяся тем, что по меньшей мере одно автоматизированное рабочее место дежурного включено в состав подсистемы местного и/или удаленного управления и наблюдения, содержащей также автоматизированные рабочие места эксплуатационного персонала, управляющий вычислительный компьютер включен в состав подсистемы центрального процессора, выполненной с возможностью определения состояния объектов контроля и управления и с возможностью формирования управляющих команд для подсистемы объектных контроллеров на изменение состояния контролируемых объектов, процессорное ядро управляющего компьютера состоит из двух функционально идентичных модулей и имеет структуру «два из двух» с обеспечением горячего резервирования, а электронные устройства управления и контроля, осуществляющие непосредственный контроль и управление объектами нижнего уровня локальной железнодорожной автоматики и телемеханики, входят в состав подсистемы объектных контроллеров, представляющей собой интерфейс для напольного оборудования, при этом данная подсистема выполнена с возможностью приема управляющих сигналов от подсистемы центрального процессора, а также с возможностью осуществления непрерывного контроля объектов контроля и управления, передачи актуальной фактической информации в подсистему центрального процессора.
2. Микропроцессорная система по п. 1, отличающаяся тем, что содержит подсистему защиты от несанкционированного доступа и проникновения вредоносных программ, выполненную с возможностью взаимодействия со всеми указанными подсистемами.
| Устройство для дистанционного управления сбрасыванием бревен | 1960 |
|
SU133798A1 |
| Двухчелюстный грейфер | 1949 |
|
SU79083A1 |
| Способ восстановления движения поездов на участке железной дороги с использованием мобильного комплекса микропроцессорной системы управления стрелками и светофорами | 2016 |
|
RU2622316C1 |
| Мобильный комплекс микропроцессорной системы управления стрелками и светофорами участка железной дороги | 2016 |
|
RU2622522C1 |
| "Siemens TS RA безопасность, надежность, качество" Транспортная газета "Евразия Вести" N6, июль 2003, стр | |||
| Способ изготовления электрических сопротивлений посредством осаждения слоя проводника на поверхности изолятора | 1921 |
|
SU19A1 |
| МИКРОПРОЦЕССОРНАЯ СИСТЕМА ЦЕНТРАЛИЗАЦИИ СТРЕЛОК И СИГНАЛОВ | 2011 |
|
RU2495778C2 |
| УСТРОЙСТВО ДИВЕРСИФИЦИРОВАННОГО БЕЗОПАСНОГО УПРАВЛЕНИЯ, В ЧАСТНОСТИ, ДЛЯ ЖЕЛЕЗНОДОРОЖНОЙ СИСТЕМЫ | 2007 |
|
RU2454345C2 |
| Автоматическая поилка для животных | 1951 |
|
SU96088A1 |
| RU 138441 U1, 20.03.2014. | |||

