Изобретение относится к области авиационной техники и может быть использовано в системах управления боковым движением самолета. Известно устройство - демпфер колебаний типа Д-3К-110 [1]. Управление демпфером осуществляется с помощью функционала:
δн = K(q)ωy.
Здесь δн - угол отклонения руля направления;
K(q) - коэффициент пропорциональности, изменяемый в функции скоростного напора q;
ωy - угловая скорость рыскания.
Недостатком устройства является существенная зависимость качества переходных процессов от степени собственного демпфирования самолета.
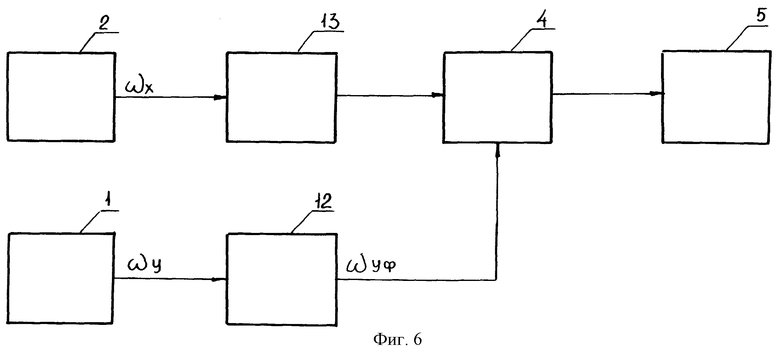
В качестве прототипа взят наиболее близкий к предлагаемому устройству демпфер рыскания - ДР-134М, содержащий датчики угловых скоростей крена и рыскания, дифференцирующий фильтр вида  , суммирующий усилитель, привод руля направления (фиг.6).
, суммирующий усилитель, привод руля направления (фиг.6).
Описание прототипа приведено в "Руководстве по эксплуатации и техническому обслуживанию демпфера рыскания ДР-134М", входящему в состав "Технического описания оборудования самолета ТУ-134М", 1960 г.
Устройство прототипа при выпущенных закрылках управляется с помощью функционала:
При убранных закрылках, на основных режимах полета, сигнал с датчика с угловой скорости крена отключается.
Недостатками устройства прототипа являются:
- использование дифференцирующего фильтра только в цепи сигнала угловой скорости рыскания ωy уменьшает степень апериодической устойчивости;
- область устойчивости системы с устройством прототипа сужается при наличии путевой неустойчивости самолета, что характерно для режимов полета на больших углах атаки:
- при увеличении степени путевой неустойчивости или появлении поперечной неустойчивости система становится неустойчивой. Этот недостаток усугубляется при путевой неустойчивости на малых углах атаки, которая может появиться при полете на больших числах М;
- качество переходных процессов в большой степени определяется степенью собственного демпфирования самолета.
Целью данного изобретения является расширение области устойчивости бокового движения и улучшение качества переходных процессов при полете самолета в широком диапазоне изменения углов атаки и аэродинамических характеристик.
Поставленная цель изобретения достигается тем, что в устройство "Демпфер рыскания самолета", содержащее датчики угловых скоростей рыскания и крена, расположенные по осям связанной системы координат, суммирующий усилитель, соединенный с его выходом привод руля направления, дополнительно введены датчик угла отклонения педалей самолета, апериодический фильтр, блок настройки параметров демпфера рыскания, преобразователь системы координат в другую систему координат, повернутую на расчетный угол ϕ.
При этом выходы датчиков угловых скоростей (ДУС) рыскания и крена соединены с первым и вторым входами преобразователя системы координат, соответственно первый выход преобразователя системы координат (по ωyп) непосредственно подключен к первому входу суммирующего усилителя, второй вход (по ωxп) преобразователя через апериодический фильтр подключен ко второму входу суммирущего усилителя. Блок настройки параметров демпфера со входами, подключенными к выходам датчиков углов атаки, скоростного напора, числа М, конфигурации ЛА, связан первым выходом (угол ϕ) с третьим входом преобразователя системы координат, вторым выходом (коэффициент усиления угловой скорости крена) соединен со вторым входом апериодического фильтра, третьим выходом (постоянная времени фильтра) соединен с третьим входом апериодического фильтра, четвертым выходом (коэффициент усиления угловой скорости рыскания) соединен с третьим входом суммирующего усилителя, четвертый вход суммирующего усилителя соединен с выходом датчика угла отклонения педалей.
Выбор программ настраиваемых параметров демпфера производится на основании математического моделирования бокового движения самолета, описываемого полной системой дифференциальных уравнений при широком изменении режимов полета (углов атаки, чисел М, аэродинамических характеристик).
Данное изобретение иллюстрируется фиг.1-5.
На фиг. 1 представлена блок-схема устройства демпфера рыскания, содержащего:
1. ДУС рыскания.
2. ДУС крена.
3. Апериодический фильтр.
4. Суммирующий усилитель.
5. Привод руля направления.
6. Преобразователь системы координат ДУС.
7. Блок настройки параметров демпфера.
8. Датчик утла отклонения педалей.
Устройство работает следующим образом: сигнал с ДУС крена 2 после прохождения через преобразователь системы координат 6 и апериодический фильтр 3 суммируется на суммирующем усилителе 4 с сигналом ДУС рыскания 1 после прохождения его через преобразователь системы координат 6 и сигналом δп датчика 8 угла отклонения педалей самолета:
Здесь δн - сигнал, поступающий на привод руля направления;
N, L, KП - коэффициенты усиления;
ТХ - постоянная времени апериодического фильтра;
δп - угол отклонения педалей.
Алгоритм 3 работы преобразователя координат 6 имеет вид:
ωхп, ωyп - преобразованные угловые скорости;
ωx и ωy - соответственно угловые скорости крена и рыскания относительно связанной системы координат самолета;
ϕ - угол поворота новой системы координат.
Коэффициент усиления KП сигнала отклонения педалей самолета реализуется в усилителе 4.
Введение угла поворота системы координат ϕ повышает быстродействие системы управления за счет увеличения частоты звена обратной связи контура управления, определяемой формулой:
Здесь обозначено:
ω - частота звена обратной связи; и
и  - эффективности руля направления, соответственно, относительно связанных осей Х1 и Y1 самолета;
- эффективности руля направления, соответственно, относительно связанных осей Х1 и Y1 самолета;
α - угол атаки;
ϕ - угол поворота системы координат;
К - коэффициент усиления, зависящий от величин аэродинамических моментов самолета.
Из формулы видно, что при введении угла ϕ ее числитель растет, а знаменатель уменьшается.
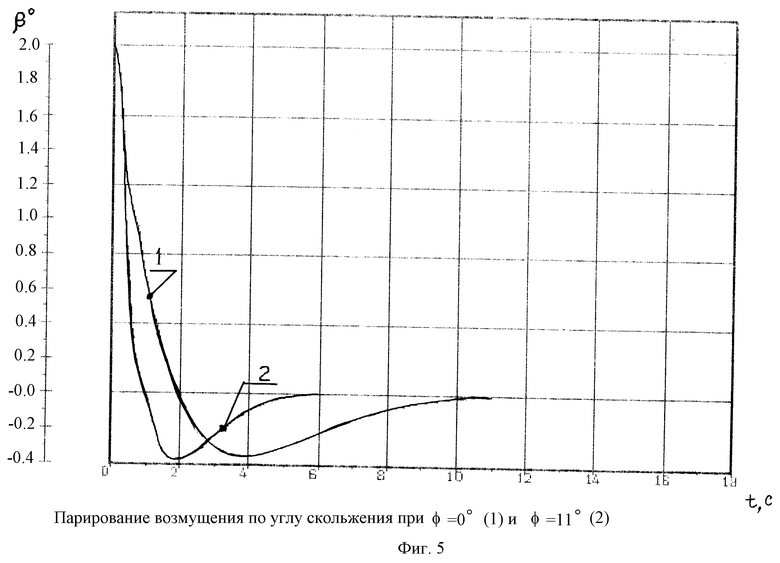
На фиг.5 показан переходный процесс парирования возмущения по углу скольжения β=2o при углах ϕ=0 и ϕ=11o.
Из этой фигуры видно, что время парирования возмущения при ϕ=0 (кривая 1) значительно превышает время парирования возмущения при ϕ=11o (кривая 2).
Угол ϕ определяется в виде программной функции угла атаки и аэродинамических характеристик при математическом моделировании системы управления конкретного самолета.
Настройка параметров преобразователя системы координат ДУС, апериодического фильтра, суммирующего усилителя производится с помощью сигналов, поступающих с блока настройки параметров 7, на вход которого с датчиков бортовых систем самолета подается информация об угле атаки, скоростном напоре, числе М и состоянии конфигурации самолета.
При выполнении маневра сигнал с демпфера колебаний, поступающий на привод руля направления и препятствующий маневру самолета, компенсируется летчиком с помощью отклонения педалей.
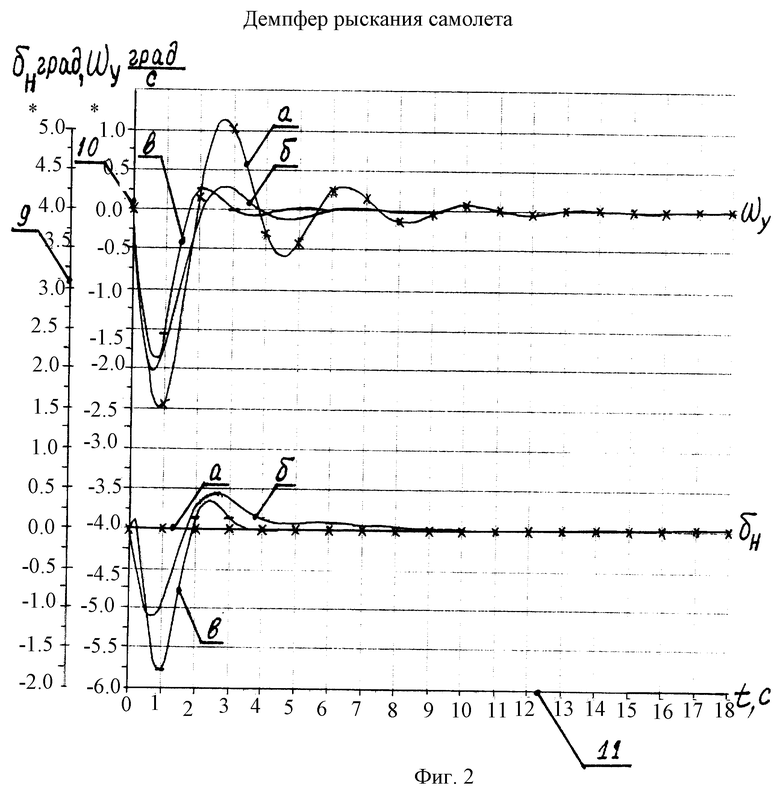
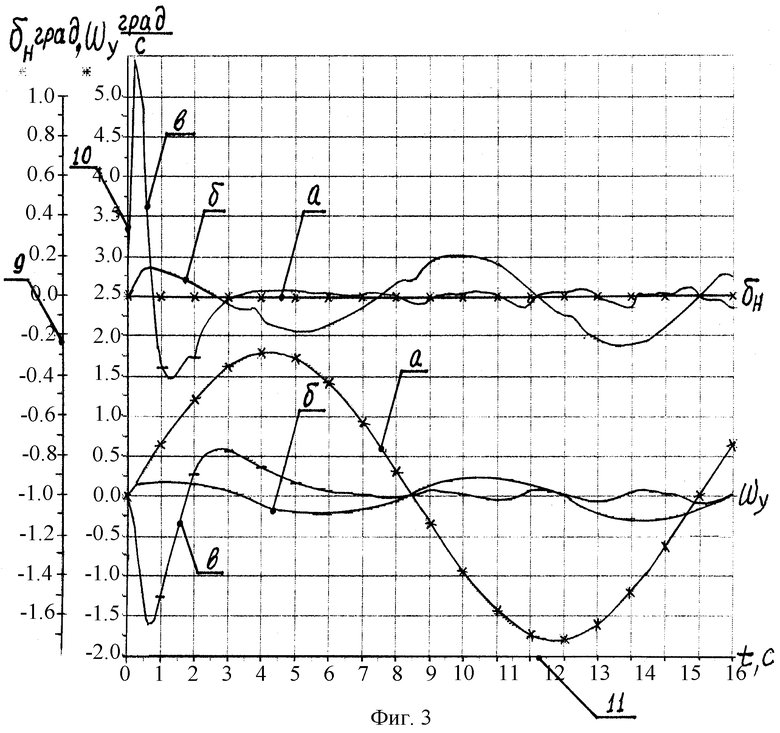
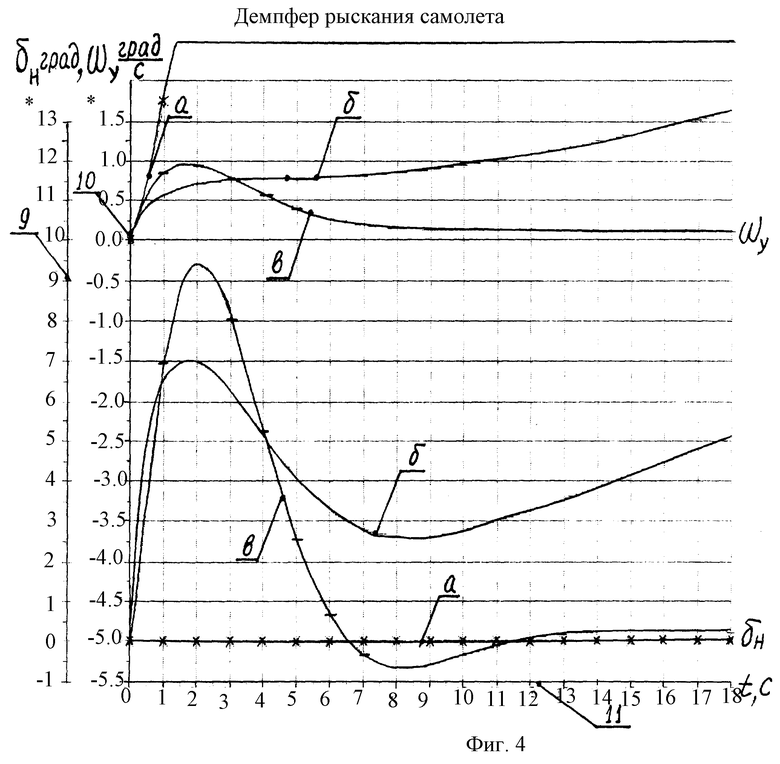
На фиг. 2-4 показаны переходные процессы самолета с различной степенью статической устойчивости при возмущении по углу скольжения, полученные при математическом моделировании. Здесь обозначено:
а - переходные процессы самолета без демпфера;
б - переходные процессы самолета с прототипом;
в - переходные процессы самолета с предлагаемым устройством;
9 - шкала отклонения руля направления δн в градусах;
10 - шкала отклонения угловой скорости рыскания ωy в градусах в секунду;
11 - шкала времени переходного процесса в секундах.
На фиг.2 показан переходный процесс статически устойчивого самолета. Как видно из фиг.2б и 2в, при использовании демпфера рыскания различных схем переходные процессы практически не отличаются. Колебания самолета без демпфера (фиг.2а) затухают в течение 10 с.
На фиг. 3 показан переходный процесс самолета с путевой неустойчивостью при отсутствии собственного демпфирования. На фиг.3а показан переходный процесс самолета без демпфера рыскания, в этом случае возникают незатухающие колебания большой амплитуды.
При использовании прототипа в качестве демпфера (фиг.3б) возникают слабо расходящиеся колебания более высокой частоты. Самолет с предлагаемой схемой демпфера (фиг. 3в) устойчив, время затухания колебаний после возмущения не превышает 6 с.
На фиг.4 показан переходной процесс самолета с путевой и поперечной неустойчивостью. На фиг.4а показан переходный процесс самолета без демпфера, из фигуры видно, что движение апериодически неустойчиво. Самолет с прототипом (фиг. 4б) также апериодически неустойчив, но характер расходящегося движения менее интенсивен. Самолет с предлагаемой схемой демпфера (фиг.4в) устойчив, время переходного процесса не превышает 6 с.
На фиг. 6 представлена блок-схема прототипа прилагаемого устройства - демпфера рыскания ДР-134М, содержащего:
1. ДУС рыскания.
2. ДУС крена.
4. Суммирующий усилитель.
5. Привод руля направления.
12. Дифференцирующий фильтр.
13. Переключатель сигнала ДУС крена в зависимости от положения закрылков.
Таким образом предложенное устройство за счет введения апериодического фильтра сигнала угловой скорости крена, преобразователя координат угловых скоростей рыскания и крена в другую систему координат и блока настройки параметров демпфера позволяет:
- повысить комфортность ручного пилотирования при изменении в широком диапазоне режимов полета (угла атаки, скоростного напора, числа М, конфигурации самолета);
- расширить область устойчивости при наличии путевой или поперечной статической неустойчивости и получить приемлемое качество регулирования при некоторой степени динамической неустойчивости самолета.
Источники информации
1. Техническое описание оборудования самолета СУ-11. Демпфер колебаний Д-3К-110, 1962.
2. Техническое описание оборудования самолета ТУ-134М. Руководство по эксплуатации и техническому обслуживанию демпфера рыскания ДР-134М, 1960, прототип.
3. Динамика продольного и бокового движения. Г.С. Бюшгенс, Р.В. Студнев, с. 326-343. Издательство Машиностроение, 1979 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 1991 |
|
SU1840700A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ВЫВЕДЕНИЯ САМОЛЕТА ИЗ РЕЖИМОВ СВАЛИВАНИЯ И ШТОПОРА В ШТАТНЫЙ РЕЖИМ ПОЛЕТА | 2005 |
|
RU2280591C1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ САМОЛЕТОМ В БОКОВОМ ДВИЖЕНИИ | 2017 |
|
RU2671063C1 |
| СПОСОБ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК ВОЗДУШНОЙ СПУТНОЙ СТРУИ ЗА ТРАНСПОРТНЫМ СРЕДСТВОМ | 1993 |
|
RU2088487C1 |
| СИСТЕМА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА С ИНТЕГРИРУЮЩИМ ПРИВОДОМ | 2007 |
|
RU2335008C1 |
| СПОСОБ ПОДАВЛЕНИЯ БОКОВЫХ КОЛЕБАНИЙ МАНЕВРЕННОГО САМОЛЕТА НА БОЛЬШИХ УГЛАХ АТАКИ | 2009 |
|
RU2401220C1 |
| УСТРОЙСТВО ДЛЯ ПОЛЕТНОГО КОНТРОЛЯ ВЕСА ТОПЛИВА САМОЛЕТА | 2008 |
|
RU2377507C1 |
| АВТОМАТ УСТОЙЧИВОСТИ БЕСПИЛОТНОГО МАЛОРАЗМЕРНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1988 |
|
SU1826781A1 |
| СИСТЕМА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА СО СТАТИЧЕСКИМ ПРИВОДОМ | 2007 |
|
RU2335006C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК АВТОМАТИЧЕСКИ УПРАВЛЯЕМЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПО РЕЗУЛЬТАТАМ ЛЕТНЫХ ИСПЫТАНИЙ | 1994 |
|
RU2124711C1 |
Изобретение может быть использовано в системах управления бокового движения самолета. Технический результат - расширение области устойчивости бокового движения и улучшение качества переходных процессов при полете самолета в широком диапазоне изменения углов атаки и аэродинамических характеристик. Демпфер рыскания с датчиками угловых скоростей рыскания и крена, суммирующим усилителем, приводом руля направления содержит датчик угла отклонения педалей самолета, преобразователь системы координат сигналов датчиков угловых скоростей в другую систему координат, блок настройки параметров демпфера, апериодический фильтр, включенный между датчиком угловой скорости крена и суммирующим усилителем. 6 ил.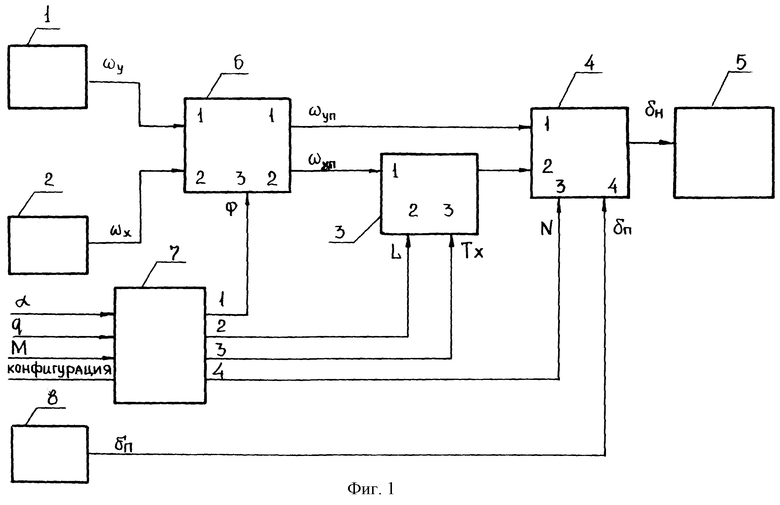
Демпфер рыскания самолета, содержащий датчики угловых скоростей рыскания и крена, расположенные по осям связанной системы координат, суммирующий усилитель, соединенный с его выходом привод руля направления, отличающийся тем, что в него введены апериодический фильтр, блок настройки параметров демпфера, преобразователь системы координат датчиков угловых скоростей рыскания и крена в другую систему координат, повернутую на угол относительно первой, входы которого соединены с выходами датчиков угловых скоростей рыскания и крена, соответственно, выход по угловой скорости рыскания преобразователя системы координат непосредственно связан с первым входом суммирующего усилителя, выход по угловой скорости крена через апериодический фильтр связан со вторым входом суммирующего усилителя, при этом блок настройки параметров демпфера со входами, подключенными к выходам датчиков угла атаки, скоростного напора, числа М, конфигурации ЛА, связан первым выходом с третьим входом преобразователя системы координат, вторым выходом соединен со вторым входом апериодического фильтра, третьим выходом соединен с третьим входом апериодического фильтра, четвертым выходом соединен с третьим входом суммирующего усилителя, на четвертый вход которого поступает сигнал, соответствующий углу отклонения педалей самолета.
| Халат для профессиональных целей | 1918 |
|
SU134A1 |
| // Руководство по эксплуатации и техническому обслуживанию демпфера рыскания | |||
| Халат для профессиональных целей | 1918 |
|
SU134A1 |
| RU 2060209 C1, 20.05.1996 | |||
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1987 |
|
RU2040433C1 |
