Область техники
[1] Изобретение относится к области дисковых вакуумных фильтров, предназначенных для разделения жидкой и твердой фаз суспензии, и может быть использовано в процессах по обогащению руды.
Предпосылки к созданию изобретения
[2] Дисковый вакуумный фильтр, принцип действия которого раскрыт, например, в публикации WO2014170533A1, 23.10.2014, B01D33/21, и который является прототипом настоящего изобретения, содержит ряд фильтровальных дисков, способных вращаться относительно горизонтальной оси, при этом каждый фильтровальный диск образован несколькими секторными элементами. Каждый секторный элемент, в свою очередь, содержит две боковые стенки, выполненные из пористой водопроницаемой керамики, между которыми заключена герметичная полость. Наружные поверхности боковых стенок расположены перпендикулярно указанной выше горизонтальной оси.
[3] При прохождении секторного элемента через ванну с пульпой, представляющей собой, например, суспензию железорудного концентрата, в полости создается вакуум. В совокупности с капиллярным эффектом, характерным для пористой керамики, вакуум побуждает жидкую фазу суспензии просачиваться через боковые стенки в полость в виде фильтрата. Далее фильтрат, представляющий собой, как правило, воду с растворенными солями и взвешенными мельчайшими частицами, попадает в дренажную систему дискового вакуумного фильтра и удаляется.
[4] При подъеме секторного элемента из ванны с пульпой на наружных поверхностях его боковых стенок остается осадок из налипших частиц. После некоторого периода нахождения осадка на воздухе с целью сушки в ходе вращения секторного элемента и при продолжающемся всасывании фильтрата сквозь боковые стенки, осадок превращается в обезвоженный концентрат – кек. Далее при помощи специальных ножей кек срезается с наружных поверхностей боковых стенок на транспортер и удаляется в качестве готового продукта процесса фильтрования.
[5] Поскольку некоторое количество частиц, размер которых несколько меньше поперечного размера пор, попадают в поры боковых стенок и застревают в них, то для их удаления после срезания кека в полость секторного элемента подают фильтрат или чистую воду под повышенным давлением (далее – обратная промывка), что позволяет прочистить значительную часть пор боковых стенок.
[6] В ходе полного оборота секторного элемента вокруг упомянутой горизонтальной оси, называемого далее циклом поворота секторного элемента (или фильтровального диска), последовательность этапов: набор осадка, сушка осадка, срезание кека и обратная промывка повторяется многократно. При этом со временем число застрявших в порах частиц, не удаленных обратной промывкой, накапливается, а проходимость пор, соответственно, ухудшается. Параллельно этому наблюдается и следующий процесс: если в пульпе присутствуют посторонние примеси, такие как глина, окисленное железо, углеводороды, различные коагулянты, флокулянты и т.п., характеризующиеся повышенной адгезией к керамике, то на стенках пор возникают отложения, которые не могут быть удалены обратной промывкой. В результате указанных факторов гидравлическое сопротивление боковых стенок существенно возрастает, способность секторного элемента всасывать фильтрат падает, а вместе с ней падает и производительность дискового вакуумного фильтра, т.е. количество срезаемого кека.
[7] Восстановление характеристик секторного элемента достигается посредством его промывки специальными реагентами (как правило, кислотой, иногда в комбинации с ультразвуковым воздействием) - так называемой регенерацией, которая позволяет растворить и удалить из пор боковых стенок отложения указанных выше примесей, солей, и в определенной степени – застрявшие в порах частицы. Регенерация проводится через заданные интервалы времени, либо при снижении водопроницаемости боковых стенок ниже заданного уровня, при этом на период регенерации работа дискового вакуумного фильтра останавливается, что отрицательно влияет на его общую производительность.
[8] Следует отметить, что эффективность процесса фильтрации можно считать приемлемой в том случае, если обеспечивается заданная степень соответствия характеристик срезанного кека, например, его массы, влажности (далее – выходные параметры) и т.п., их расчетным значениям. В то же время, значения выходных параметров напрямую зависят от характеристик пульпы, например, таких как концентрация твердой фазы в суспензии, состав твердой фазы по размеру гранул, температура пульпы, химический и минералогический составы и т.п. (далее – входные параметры).
[9] Поскольку входные параметры могут случайным образом изменяться в некоторых пределах, то для минимизации влияния таких изменений на выходные параметры требуется своевременная корректировка параметров работы исполнительных механизмов дискового вакуумного фильтра (далее – управляющих параметров). В качестве примеров управляющих параметров можно назвать частоту вращения фильтровальных дисков, величину вакуума, давление обратной промывки, уровень пульпы в ванне, и т.п. Обычно уточненные значения управляющих параметров вводятся оператором вручную через соответствующий интерфейс ввода. Однако в этом случае имеется риск пропустить момент изменения входных параметров, что может привести к выходу большого количества некондиционного продукта.
[10] В прототипе изобретения, раскрытом в публикации WO2014170533A1, 23.10.2014, B01D33/21, предусмотрена автоматизация проведения регенерации в ответ на увеличение давления при обратной промывке, что косвенным образом свидетельствует об ухудшении проницаемости боковых стенок секторных элементов. Данное решение позволяет увеличить производство кека за счет сокращения времени простоя дискового вакуумного фильтра на период регенерации, когда она не является необходимой.
[11] В то же время, указанный результат, как и описанная выше эффективность фильтрации, могут быть обеспечены только при отсутствии отклонений значений входных параметров, характеризующих пульпу, от их требуемых значений, что в реальных условиях трудноосуществимо. При этом возможное наступление данных обстоятельств неизбежно скажется на выходных параметрах, характеризующих кек, что может создать проблемы для выполнения дальнейших технологических процессов. Серьезность последствий в данном случае будет целиком определяться внимательностью и компетентностью оператора, обслуживающего дисковый вакуумный фильтр.
[12] Целью изобретения является предложение решений, позволяющих автоматизировать реакцию исполнительных механизмов дискового вакуумного фильтра на изменение характеристик пульпы для обеспечения стабильности характеристик кека и исключения влияния человеческого фактора на процесс фильтрации.
Сущность изобретения
[13] Для достижения поставленной цели настоящее изобретение реализовано посредством двух объектов изобретения.
[14] Первым объектом изобретения является способ управления дисковым вакуумным фильтром, исполнительные механизмы которого функционируют в соответствии с совокупностью значений управляющих параметров. Способ характеризуется тем, что в заданные моменты времени определяют совокупность значений входных параметров из заданного набора входных параметров, причем входные параметры характеризуют свойства пульпы. Далее методом подбора устанавливают оптимальную совокупность значений управляющих параметров из заданного набора управляющих параметров, при которой совокупность значений выходных параметров из заданного набора выходных параметров становится равной целевой совокупности значений выходных параметров. Выходные параметры при этом характеризуют свойства кека. Сохраняют в памяти множество пар из совокупностей значений входных параметров и соответствующих им оптимальных совокупностей значений управляющих параметров, а далее при определении совокупности значений входных параметров, автоматически передают на исполнительные механизмы управляющие команды, соответствующие оптимальной совокупности значений управляющих параметров, являющейся парной для данной совокупности значений входных параметров.
[15] В частном случае первого объекта изобретения в качестве значения каждого входного параметра из совокупности значений входных параметров используют условное значение данного входного параметра, которое определяют как наименование интервала, в который попадает измеренное значение данного входного параметра.
[16] В другом частном случае первого объекта изобретения целевая совокупность значений выходных параметров является одной из множества целевых совокупностей значений выходных параметров, и для каждой целевой совокупности значений выходных параметров сохраняют в памяти множество пар из совокупностей значений входных параметров и соответствующих им оптимальных совокупностей значений управляющих параметров.
[17] В еще одном частном случае первого объекта изобретения заданный набор выходных параметров включает в себя массу срезанного кека и его влажность.
[18] Вторым объектом изобретения является устройство управления дисковым вакуумным фильтром, содержащим исполнительные механизмы, функционирующие в соответствии с совокупностью значений управляющих параметров. Дисковый вакуумный фильтр также содержит датчики состояния пульпы, в заданные моменты времени определяющие совокупность значений входных параметров из заданного набора входных параметров. Кроме того, в состав дискового вакуумного фильтра входят датчики состояния кека, определяющие совокупность значений выходных параметров из заданного набора выходных параметров. Устройство управления при этом включает в себя блок входной информации, способный отображать совокупность значений входных параметров, определенную датчиками состояния пульпы, и совокупность значений выходных параметров, определенную датчиками состояния кека. Устройство управления содержит также блок ввода управляющих команд, способный передавать на исполнительные механизмы управляющие команды, соответствующие совокупности значений управляющих параметров, которая может быть введена оператором, либо получена от блока автоматического управления.
[19] В состав устройства управления входит блок автоматического управления, способный в случае, когда совокупность значений выходных параметров становится равной целевой совокупности значений выходных параметров, считать введенную оператором через блок ввода управляющих команд совокупность значений управляющих параметров оптимальной совокупностью значений управляющих параметров для данной совокупности значений входных параметров. Блок автоматического управления способен также сохранять в памяти множество пар из совокупности значений входных параметров и соответствующих им оптимальных совокупностей значений управляющих параметров, а при последующем получении от блока входной информации совокупности значений входных параметров передавать на блок ввода управляющих команд парную ей оптимальную совокупность значений управляющих параметров.
[20] В частном случае второго объекта изобретения блок автоматического управления выполнен с возможностью принимать в качестве значения каждого входного параметра из совокупности значений входных параметров условное значение данного входного параметра, и определять его как наименование интервала, в который попадает измеренное значение данного входного параметра.
[21] В другом частном случае второго объекта изобретения блок автоматического управления выполнен с возможностью получения задаваемой оператором целевой совокупности значений выходных параметров. При этом блок автоматического управления способен для каждой задаваемой оператором целевой совокупности значений выходных параметров сохранять в памяти множество пар из совокупностей значений входных параметров и соответствующих им оптимальных совокупностей значений управляющих параметров.
[22] В еще одном частном случае второго объекта изобретения заданный набор выходных параметров включает в себя массу срезанного кека и его влажность.
Краткое описание чертежей
[21] Осуществление изобретения будет пояснено ссылками на фигуры:
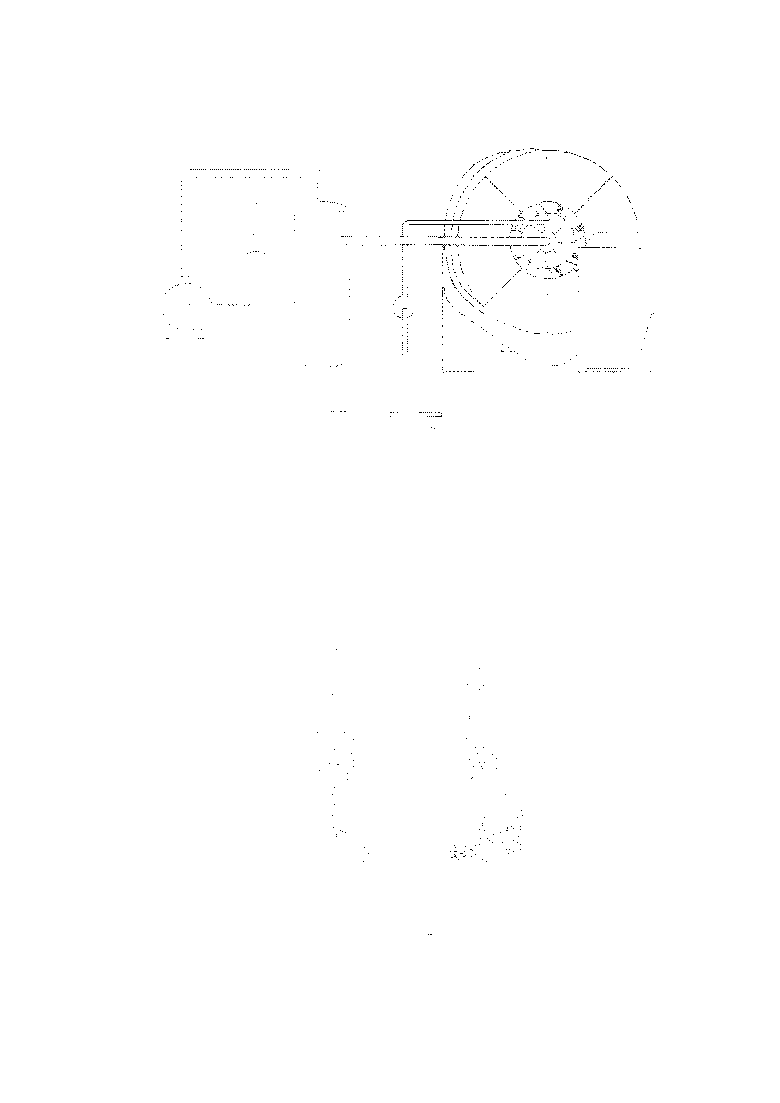
фиг. 1 – схематический вид сбоку дискового вакуумного фильтра;
фиг. 2 – схематическое изображение секторного элемента в разрезе;
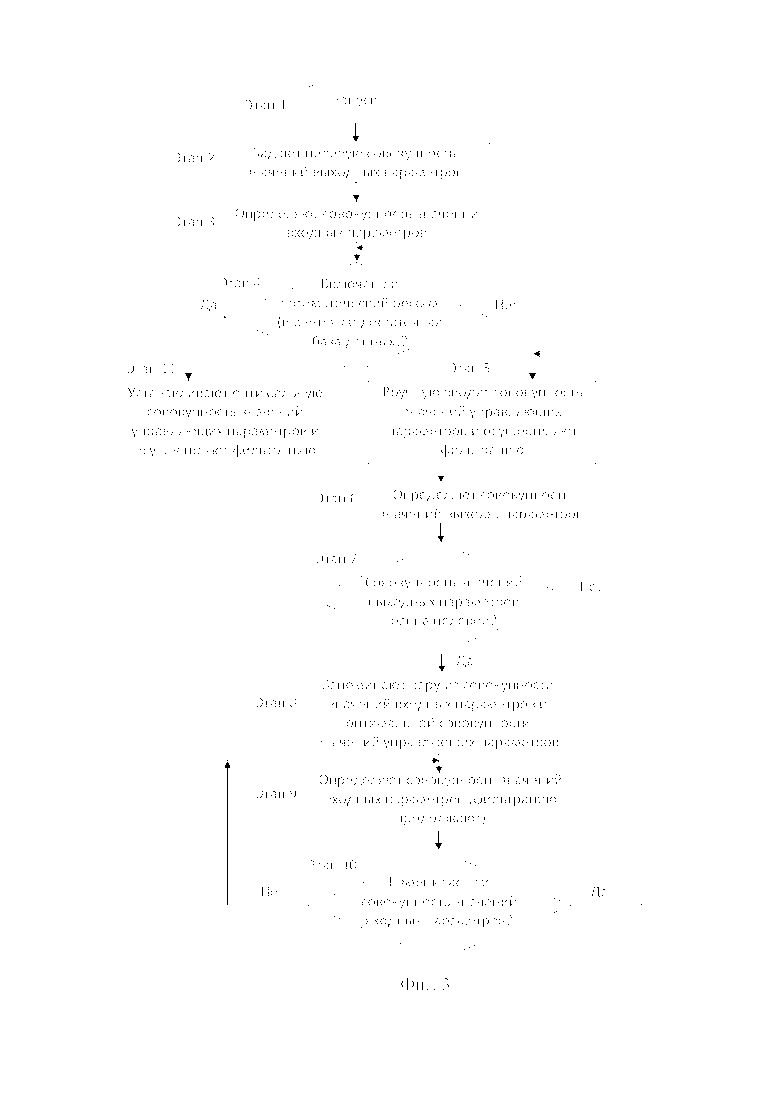
фиг. 3 – блок-схема процесса, в котором осуществлен способ управления дисковым вакуумным фильтром;
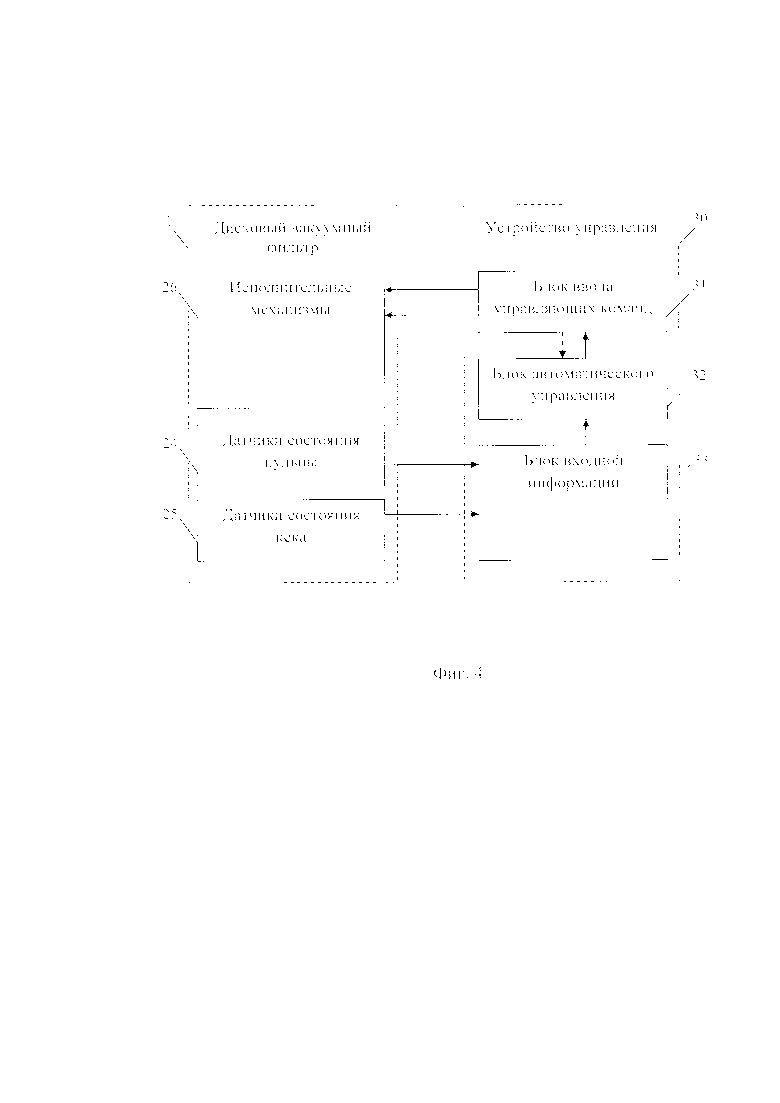
фиг. 4 – функциональная блок-схема дискового вакуумного фильтра и устройства управления дисковым вакуумным фильтром.
Осуществление изобретения
[22] Осуществление изобретения будет показано на наилучших известных авторам примерах реализации изобретения, которые не являются ограничениями в отношении объема охраняемых прав.
[23] На фиг. 1 показан схематический вид сбоку дискового вакуумного фильтра 1, в котором может быть применено настоящее изобретение. Фильтровальные диски 4 частично погружены в ванну 2 с пульпой 3, при этом они способны вращаться вокруг горизонтальной оси вместе с установленным на подшипниках каркасом 27. Пульпа 3 представляет собой суспензию из взвешенных в жидкости твердых частиц, образованных в результате измельчения горной породы.
[24] Каждый фильтровальный диск 4 образован множеством секторных элементов 5, которые прикреплены к каркасу 27 средствами крепления 10. Каждый секторный элемент 5 (фиг. 2), в свою очередь, содержит две боковые стенки 6, наружные поверхности 11 которых расположены перпендикулярно указанной горизонтальной оси, а между боковыми стенками 6 имеется полость 8. Торцевая стенка 7 ограничивает полость 8 с торцевых сторон секторного элемента 5.
[25] По меньшей мере, боковые стенки 6 секторного элемента 5 выполнены из пористой керамики. Следует отметить, что боковые стенки в общем случае могут быть изготовлены и из другого водопроницаемого материала, такого как ткань, пенистый полимер и т.п. Однако в настоящей заявке все преимущества и технические признаки изобретения будут показаны на наилучшем варианте осуществления изобретения - дисковом вакуумном фильтре с керамическими фильтрующими элементами.
[26] Поры пористой керамики, из которой изготовлены боковые стенки 6, проходят через всю толщину боковых стенок 6, и по существу представляют собой капиллярные каналы, соединяющие наружные поверхности 11 боковых стенок 6 с полостью 8. Посредством трубки 9 полость 8 соединяется либо с пневмогидравлической системой 12, включающей в себя вакуумный насос 13, жидкостный насос 14 и вакуумный ресивер 15, либо с гидравлической системой 16, содержащей нагнетательный насос 17. Переключение данных соединений обеспечивается при помощи распределительного механизма 18 и осуществляется автоматически на каждом цикле в соответствии с фазой поворота секторного элемента 5.
[27] В момент, когда секторный элемент 5 в ходе своего вращения вокруг упомянутой горизонтальной оси погружается в ванну 2 с пульпой 3, полость 8 соединяется с пневмогидравлической системой 12. Под действием вакуумного насоса 13 в полости 8 образуется вакуум. Следует отметить, что под вакуумом в контексте настоящей заявки понимается давление, являющееся пониженным относительно среднего атмосферного давления, и, как правило, находящееся в диапазоне 0,1 - 0,9 атм.
[28] В результате образования перепада давления между наружными поверхностями 11 и внутренними поверхностями 19 боковых стенок 6 (фиг. 2), а также действия капиллярного эффекта пор фильтрат начинает просачиваться в полость 8, откуда попадает в вакуумный ресивер 15 и удаляется посредством жидкостного насоса 14. В то же время, твердые частицы пульпы 3, увлекаемые потоком фильтрата, прилипают к наружным поверхностям 11 боковых стенок 6 в виде осадка, который в дальнейшем превратится в кек. Для того, чтобы в области боковых стенок 6 поддерживалась необходимая концентрация частиц пульпы 3, дисковый вакуумный фильтр 1 снабжен мешалкой 23, которая путем перемешивания пульпы 3 препятствует оседанию частиц на дно ванны 2.
[29] Когда секторный элемент 5 поднимается из ванны 2, поддержание вакуума в полости 8 c целью осуществления сушки осадка продолжается до тех пор, пока секторный элемент 5 вновь не приблизится к ванне 2. В области приближения к ванне 2 секторный элемент 5 проходит между двух ножей 20, срезающих высушенный осадок – кек 21 с обеих наружных поверхностей 11 боковых стенок 6 в емкость 22, из которой кек 21 попадает на транспортер (не показан), выводящий его из данного процесса.
[30] После этого происходит кратковременное соединение полости 8 с гидравлической системой 16, нагнетательный насос 17 которой подает в полость 8 фильтрат под повышенным давлением, осуществляя обратную промывку пор боковых стенок 6. Кроме того, через заданное число циклов или при наступлении другого условия процесс фильтрации останавливается, и путем подачи в полость 8 специального реагента производится регенерация секторного элемента 5, как это было описано выше.
[31] Отметим, что свойства пульпы 3, подаваемой в ванну 2 через задвижку (не показана), могут изменяться в некоторых пределах, главным образом, по причине нестабильности минералогического состава горной породы. Для отслеживания характеристик пульпы дисковый вакуумный фильтр 1 снабжен датчиками состояния пульпы, способными прямо или косвенно фиксировать значения входных параметры из заданного набора входных параметров. К входным параметрам, например, относятся: концентрация твердой фазы в суспензии, состав твердой фазы по размеру гранул, температура суспензии, химический и минералогический составы суспензии, рН суспензии, содержание твердого вещества в переливе из ванны 2, вязкость и мутность фильтрата. В то же время, заданный набор входных параметров может включать в себя любую комбинацию из указанных или иных входных параметров.
[32] Значения входных параметров, определенные датчиками 24 состояния пульпы в заданные моменты времени, образуют совокупность значений входных параметров из заданного набора входных параметров. Хотя датчики состояния пульпы располагаются в различных узлах дискового вакуумного фильтра 1, на фиг. 1 и фиг. 4 в своей совокупности они схематично показаны позицией 24.
[33] Кроме того, для отслеживания характеристик кека дисковый вакуумный фильтр 1 снабжен датчиками состояния кека, способными фиксировать значения выходных параметров из заданного набора выходных параметров. Заданный набор выходных параметров, как правило, включает в себя, по меньшей мере, массу срезаемого кека и его влажность, однако, он может быть расширен за счет включения в него других выходных параметров.
[34] Значения выходных параметров, определенные датчиками 25 состояния кека в заданные моменты времени, образуют совокупность значений выходных параметров из заданного набора выходных параметров. Следует также отметить, что совокупность значений выходных параметров, соответствующая совокупности предусмотренных технологическим процессом расчетных значений выходных параметров, является целевой совокупностью значений выходных параметров из заданного набора выходных параметров. Датчики состояния кека могут располагаться в различных узлах дискового вакуумного фильтра 1, при этом на фиг. 1 и фиг. 4 в своей совокупности они схематично показаны позицией 25.
[35] Как было указано выше, характеристики пульпы влияют на характеристики кека, и при изменении совокупности значений входных параметров поддержание совокупности значений выходных параметров на уровне целевой совокупности их значений обеспечивается за счет исполнительных механизмов дискового вакуумного фильтра, работающих в соответствии с управляющими командами. К исполнительным механизмам дискового вакуумного фильтра в данном случае относятся приводные устройства каркаса 27, вакуумного насоса 13, нагнетательного насоса 17, мешалки 23, задвижки для подачи пульпы и т.п. В своей совокупности исполнительные механизмы дискового вакуумного фильтра обозначены позицией 26 на фиг. 4.
[36] Управляющие команды подаются на исполнительные механизмы 26 от описанного ниже блока ввода управляющих команд 31 устройства управления 30 и формируются в соответствии со значениями управляющих параметров из заданного набора управляющих параметров. Заданный набор управляющих параметров может включать в себя: величину вакуума в полости 8, скорость вращения каркаса 27, уровень пульпы в ванне 2, давление обратной промывки, скорость вращения мешалки 23 и т.п. Совокупность значений управляющих параметров из заданного набора управляющих параметров, которая для конкретной совокупности значений входных параметров обеспечивает достижение целевой совокупности значений выходных параметров, именуется оптимальной совокупностью значений управляющих параметров для данной совокупности значений входных параметров.
[37] Способ управления дисковым вакуумным фильтром будет подробно описан со ссылками на фиг. 3 с изображением блок-схемы процесса, в котором осуществлен способ. Одновременно с этим со ссылками на фиг. 4 с изображением функциональной блок-схемы дискового вакуумного фильтра и устройства управления дисковым вакуумным фильтром будет пояснена работа устройства управления дисковым вакуумным фильтром, обозначенного позицией 30.
[38] Следует отметить, что блоки устройства управления 30, показанные на фиг. 4, являются исключительно функциональными объектами, каждый из которых может быть реализован как аппаратными, так и программными средствами, в т.ч. без образования выделенного модуля. По существу, в контексте настоящей заявки понятие «блок» означает совокупность компонентов устройства управления, связанных между собой для выполнения определенной функции. Таким образом, одни и те же компоненты могут, в зависимости от их текущей функциональной взаимосвязи с другими компонентами, принадлежать разным блокам.
[39] Кроме того, устройство управления 30 может быть интегрировано с дисковым вакуумным фильтром 1 в одну установку, либо выполнено в виде отдельного модуля, как показано на фиг. 4. В последнем случае устройство управления 30 может быть соединено с множеством дисковых вакуумных фильтров 1, выполняя для каждого из них индивидуальное управление.
[40] После запуска процесса на этапе 1, через интерфейс ввода, связанный с блоком 32 автоматического управления, оператор задает целевую совокупность значений выходных параметров, т.е. характеристик кека (этап 2). Поскольку целевая совокупность значений выходных параметров увязана с последующими технологическими процессами (досушивание кека и т.п.), то, как правило, в каждой конкретной производственной конфигурации она остается неизменной.
[41] Далее на этапе 3 на основе сигналов от датчиков 24 состояния пульпы блок 33 входной информации формирует совокупность значений входных параметров, которую отображает на мониторе и передает в блок 32 автоматического управления.
[42] После этого на этапе 4 блок 32 автоматического управления определяет, включен ли режим автоматического управления (далее также – автоматический режим). Автоматический режим включается оператором через интерфейс ввода, связанный с блоком 32 автоматического управления, после составления достаточной базы данных автоматического управления, и на первоначальном периоде работы является выключенным. Таким образом, процесс переходит на этап 5.
[43] На этапе 5 оператор, исходя из отображенной на мониторе совокупности значений входных параметров, вручную через интерфейс ввода, связанный с блоком 31 ввода управляющих команд, вводит совокупность значений управляющих параметров, которая на основании его опыта представляется ему способной обеспечить получение целевой совокупности значений выходных параметров. После этого оператор запускает процесс фильтрации, причем блок ввода управляющих команд выдает на исполнительные механизмы 26 управляющие команды, соответствующие введенной оператором совокупности значений управляющих параметров. Кроме того, веденная оператором совокупность значений управляющих параметров передается в блок автоматического управления. На фиг. 4 поток информации, введенной оператором вручную, обозначен прерывистыми стрелками, а поток информации, получаемой в автоматическом режиме – сплошными.
[44] На этапе 6 блок 33 входной информации получает сигналы от датчиков 25 состояния кека, и на основе данных сигналов он формирует совокупность значений выходных параметров, которую отображает на мониторе и передает в блок 32 автоматического управления.
[45] На этапе 7 определяется, равна ли текущая совокупность значений выходных параметров целевой совокупности значений выходных параметров. Понятие «равна» в данном случае означает, что значение каждого выходного параметра текущей совокупности попадает в заданный интервал вокруг значения соответствующего выходного параметра целевой совокупности. Если ответ отрицательный, то процесс возвращается на этап 5, где оператор корректирует введенную им ранее совокупность значений управляющих параметров. Если же целевая совокупность значений выходных параметров достигнута, то данный факт фиксируется соответствующей командой, введенной оператором или автоматически, при этом текущая совокупность значений управляющих параметров считается оптимальной совокупностью значений управляющих параметров для данной совокупности значений входных параметров.
[46] Далее на этапе 8 блок 32 автоматического управления сохраняет в памяти пару из совокупности значений входных параметров и соответствующей ей оптимальной совокупности значений управляющих параметров, после чего процесс переходит к этапу 9.
[47] На этапе 9 при продолжении фильтрации в заданные моменты определяют совокупность значений входных параметров, как это было описано для этапа 3. Однако каждый раз после этого текущая совокупность значений входных параметров, сравнивается с определенной ранее совокупностью значений входных параметров (этап 10). Если совокупность значений входных параметров не претерпела изменений, то процесс возвращается на этап 9.
[48] Если же на этапе 10 определяется, что совокупность значений входных параметров изменилась, то процесс возвращается на этап 4, после которого в цепочке этапов 5 – 7 определяется и сохраняется в памяти иная оптимальная совокупность значений управляющий параметров, соответствующая изменившейся совокупности значений входных параметров.
[49] В результате множества итераций формируется база данных автоматического управления, в которой для каждой возможной совокупности значений входных параметров имеется оптимальная совокупность значений управляющих параметров. После этого оператор может включить автоматический режим, и после очередного перехода с этапа 10 на этап 4 процесс направляется в сторону положительного ответа, т.е. - на этап 11.
[50] На этапе 11 блок 32 автоматического управления определяет оптимальную совокупность значений управляющий параметров, соответствующую текущей совокупности значений входных параметров, и без участия оператора передает ее на блок 31 ввода управляющих команд, который формирует управляющие команды и отправляет их на исполнительные механизмы 26. После этого цепочка этапов 9 – 10 – 4 – 11 многократно повторяется.
[51] Далее будет показан пример формирования базы данных автоматического управления. Следует отметить, что в предпочтительном случае первого и второго объектов изобретения в качестве значения каждого входного параметра из совокупности значений входных параметров используют условное значение данного входного параметра, которое определяют как наименование интервала, в который попадает измеренное значение данного входного параметра. Использование условных значений входных параметров позволяет существенным образом уменьшить число комбинаций в базе данных автоматического управления. В то же время, значения управляющих параметров определяются точно.
[52] Пусть заданный набор входных параметров включает в себя два параметра A и Б, причем параметр А, как более значимый, способен принимать условные значения «низкий», «пониженный», «средний», «повышенный», «высокий», а параметр Б, как менее значимый, способен принимать условные значения «низкий» и «высокий». Таким образом, параметры А и Б способны сформировать совокупности значений входных параметров X1 – X10, приведенные в Таблице 1.
Таблица 1
[53] Тогда оптимальные совокупности значений управляющих параметров, соответствующие совокупностям значений входных параметров X1 – X10, т.е. парные им, будут именоваться как Y1 – Y10, а целевая совокупность значений выходных параметров – Z.
[54] База данных автоматического управления, сформированная для целевой совокупности значений выходных параметров Z, в этом случае примет вид согласно Таблице 2.
Таблица 2
[55] Таким образом, при работе в автоматическом режиме блок 32 автоматического управления, получая от блока 33 входной информации, например, совокупность значений входных параметров Х3, т.е. параметр А – пониженный, параметр Б – низкий, выдает на блок 31 ввода управляющих команд парную совокупности Х3 оптимальную совокупность Y3 значений управляющих параметров для дальнейшего формирования управляющих команд и передачи их на исполнительные механизмы 26.
[56] Следует отметить, что целевая совокупность значений выходных параметров Z может являться одной из множества целевых совокупностей значений выходных параметров Z1 – Zn. В этом случае для каждой целевой совокупности значений выходных параметров указанным выше образом формируется база данных автоматического управления, состоящая из множества пар из совокупностей значений входных параметров и соответствующих им оптимальных совокупностей значений управляющих параметров.
[57] В заключение отметим, что первый и второй объекты изобретения в ответ на изменение характеристик пульпы позволяют обеспечить незамедлительную автоматическую корректировку работы исполнительных механизмов дискового вакуумного фильтра и, таким образом, не допустить отклонения характеристик кека от их расчетных значений.
| название | год | авторы | номер документа |
|---|---|---|---|
| КЕРАМИЧЕСКИЙ ДИСКОВЫЙ ВАКУУМНЫЙ ФИЛЬТР И СПОСОБ ФИЛЬТРОВАНИЯ СУСПЕНЗИЙ | 2018 |
|
RU2699608C1 |
| ДИСКОВЫЙ ВАКУУМНЫЙ ФИЛЬТР И СПОСОБ ФИЛЬТРОВАНИЯ СУСПЕНЗИЙ | 2018 |
|
RU2688574C1 |
| СПОСОБ РЕГЕНЕРАЦИИ КЕРАМИЧЕСКОГО ФИЛЬТРУЮЩЕГО ЭЛЕМЕНТА И КОМПОЗИЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2739755C1 |
| СПОСОБ ГЛУБОКОЙ КИСЛОТНОЙ РЕГЕНЕРАЦИИ КЕРАМИЧЕСКОГО ФИЛЬТРУЮЩЕГО ЭЛЕМЕНТА И КОМПОЗИЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2766541C1 |
| СПОСОБ ГЛУБОКОЙ КИСЛОТНОЙ РЕГЕНЕРАЦИИ КЕРАМИЧЕСКОГО ФИЛЬТРУЮЩЕГО ЭЛЕМЕНТА И КОМПОЗИЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ, СОДЕРЖАЩАЯ ОЭДФ-КИСЛОТУ | 2024 |
|
RU2830008C1 |
| Способ автоматического управления работой дискового вакуум-фильтра | 1991 |
|
SU1816482A1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СУДОВЫМ ДВИГАТЕЛЕМ СО ВСТРОЕННОЙ НЕЙРОСЕТЬЮ | 2024 |
|
RU2828993C1 |
| Способ автоматического управления работой вакуум-фильтра | 1990 |
|
SU1713617A1 |
| НАСОС-ГИДРОЦИКЛОННАЯ УСТАНОВКА СИСТЕМЫ РАЗДЕЛЕНИЯ СУСПЕНЗИЙ РУД | 2011 |
|
RU2465057C1 |
| Способ поиска затонувшего радиационного источника автономным необитаемым подводным аппаратом | 2023 |
|
RU2825830C1 |
Изобретение предназначено для разделения жидкой и твердой фаз суспензии. Способ управления дисковым вакуумным фильтром характеризуется тем, что в заданные моменты времени определяют совокупность значений входных параметров из заданного набора входных параметров, причем входные параметры характеризуют свойства пульпы, методом подбора устанавливают оптимальную совокупность значений управляющих параметров из заданного набора управляющих параметров, при которой совокупность значений выходных параметров из заданного набора выходных параметров становится равной целевой совокупности значений выходных параметров, причем выходные параметры характеризуют свойства кека и сохраняют в памяти множество пар из совокупностей значений входных параметров и соответствующих им оптимальных совокупностей значений управляющих параметров, а далее при определении совокупности значений входных параметров автоматически передают на исполнительные механизмы управляющие команды, соответствующие оптимальной совокупности значений управляющих параметров, которая является парной для данной совокупности значений входных параметров. Устройство управления дисковым вакуумным фильтром содержит исполнительные механизмы, функционирующие в соответствии с совокупностью значений управляющих параметров, датчики состояния пульпы, в заданные моменты времени определяющие совокупность значений входных параметров из заданного набора входных параметров, датчики состояния кека, определяющие совокупность значений выходных параметров из заданного набора выходных параметров, блок входной информации, способный отображать совокупность значений входных параметров, определенную датчиками состояния пульпы, и совокупность значений выходных параметров, определенную датчиками состояния кека, блок ввода управляющих команд, способный передавать на исполнительные механизмы управляющие команды, соответствующие совокупности значений управляющих параметров, которая может быть введена оператором, либо получена от блока автоматического управления, блок автоматического управления, способный в случае, когда совокупность значений выходных параметров становится равной целевой совокупности значений выходных параметров, считать введенную оператором через блок ввода управляющих команд совокупность значений управляющих параметров оптимальной совокупностью значений управляющих параметров для данной совокупности значений входных параметров и сохранять в памяти множество пар из совокупности значений входных параметров и соответствующих им оптимальных совокупностей значений управляющих параметров, а при последующем получении от блока входной информации совокупности значений входных параметров передавать на блок ввода управляющих команд парную ей оптимальную совокупность значений управляющих параметров. Технический результат: обеспечение стабильности характеристик кека. 2 н. и 6 з.п. ф-лы, 4 ил., 2 табл.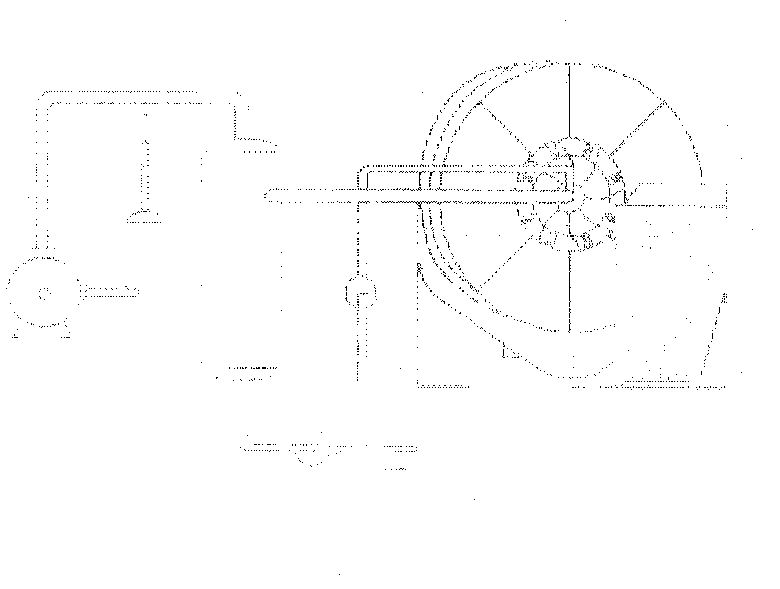
1. Способ управления дисковым вакуумным фильтром, исполнительные механизмы которого функционируют в соответствии с совокупностью значений управляющих параметров, при этом способ характеризуется тем, что
в заданные моменты времени определяют совокупность значений входных параметров из заданного набора входных параметров, причем входные параметры характеризуют свойства пульпы,
методом подбора устанавливают оптимальную совокупность значений управляющих параметров из заданного набора управляющих параметров, при которой совокупность значений выходных параметров из заданного набора выходных параметров становится равной целевой совокупности значений выходных параметров, причем выходные параметры характеризуют свойства кека, и
сохраняют в памяти множество пар из совокупностей значений входных параметров и соответствующих им оптимальных совокупностей значений управляющих параметров, а далее
при определении совокупности значений входных параметров, автоматически передают на исполнительные механизмы управляющие команды, соответствующие оптимальной совокупности значений управляющих параметров, которая является парной для данной совокупности значений входных параметров.
2. Способ по п. 1, в котором в качестве значения каждого входного параметра из совокупности значений входных параметров используют условное значение данного входного параметра, которое определяют как наименование интервала, в который попадает измеренное значение данного входного параметра.
3. Способ по п. 1, в котором целевая совокупность значений выходных параметров является одной из множества целевых совокупностей значений выходных параметров, и для каждой целевой совокупности значений выходных параметров сохраняют в памяти множество пар из совокупностей значений входных параметров и соответствующих им оптимальных совокупностей значений управляющих параметров.
4. Способ по п. 1, в котором заданный набор выходных параметров включает в себя массу срезанного кека и его влажность.
5. Устройство управления дисковым вакуумным фильтром, содержащим
исполнительные механизмы, функционирующие в соответствии с совокупностью значений управляющих параметров,
датчики состояния пульпы, в заданные моменты времени определяющие совокупность значений входных параметров из заданного набора входных параметров,
датчики состояния кека, определяющие совокупность значений выходных параметров из заданного набора выходных параметров,
при этом устройство управления включает в себя
блок входной информации, способный отображать совокупность значений входных параметров, определенную датчиками состояния пульпы, и совокупность значений выходных параметров, определенную датчиками состояния кека,
блок ввода управляющих команд, способный передавать на исполнительные механизмы управляющие команды, соответствующие совокупности значений управляющих параметров, которая может быть введена оператором, либо получена от блока автоматического управления,
блок автоматического управления, способный
в случае, когда совокупность значений выходных параметров становится равной целевой совокупности значений выходных параметров, считать введенную оператором через блок ввода управляющих команд совокупность значений управляющих параметров оптимальной совокупностью значений управляющих параметров для данной совокупности значений входных параметров, и
сохранять в памяти множество пар из совокупности значений входных параметров и соответствующих им оптимальных совокупностей значений управляющих параметров, а
при последующем получении от блока входной информации совокупности значений входных параметров передавать на блок ввода управляющих команд парную ей оптимальную совокупность значений управляющих параметров.
6. Устройство по п. 5, в котором блок автоматического управления выполнен с возможностью принимать в качестве значения каждого входного параметра из совокупности значений входных параметров условное значение данного входного параметра, и определять его как наименование интервала, в который попадает измеренное значение данного входного параметра.
7. Устройство по п. 5, в котором блок автоматического управления выполнен с возможностью получения задаваемой оператором целевой совокупности значений выходных параметров, и
способен для каждой задаваемой оператором целевой совокупности значений выходных параметров сохранять в памяти множество пар из совокупностей значений входных параметров и соответствующих им оптимальных совокупностей значений управляющих параметров.
8. Устройство по п. 5, в котором заданный набор выходных параметров включает в себя массу срезанного кека и его влажность.
| WO 2014170533 A1, 23.10.2014 | |||
| Устройство для мгновенной отдувки отфильтрованного осадка с дисков вакуум-фильтра | 1988 |
|
SU1611391A1 |
| US 2012325753 A1, 27.12.2012 | |||
| CN 202289658 U, 04.07.2012. | |||

