Область техники
Группа изобретений относится к летательным аппаратам вертикального взлета и посадки. Преимущественно, но, не ограничиваясь, летательный аппарат в соответствии с настоящим изобретением предназначен для многоцелевых беспилотных воздушных систем.
Уровень техники
В современное время, беспилотные воздушные системы разрабатываются для выполнения широкого круга специальных задач, таких как, например, перевозка грузов, несение вооружения, наблюдение, контроль линейных объектов, поисковые операции, дистанционное зондирование, геодезия и картография и др.
До последнего времени такие системы создавались в виде универсальных несущих платформ, обеспечивающих несение изменяемого груза и (или) оборудования. Однако любое специальное применение беспилотной воздушной системы связано с особыми функциональными требованиями, которые определяют ее принципиальные конструктивные решения. Среди требований, определяющих конструкцию беспилотной воздушной системы могут быть: длительность полета, высота полета, полезная грузоподъемность, возможность вертикального зависания и др.
При этом многие виды применений беспилотных воздушных систем, требуют обеспечения горизонтального полета, при одновременной возможности вертикального взлета и посадки. Функциональная возможность вертикального взлета и посадки особенно актуальна при отсутствии оборудованных взлетно-посадочных полос, а также в местах, где их размещение невозможно в силу ограничения необходимого пространства, например, в городских условиях, на судах (кораблях), на буровых платформах.
Из уровня техники известны конвертопланы, нескольких получивших применение в пилотируемой авиации конструктивных типов, отличающихся принципами осуществления полета в различных режимах.
В частности известны так называемые «винтокрылы», содержащие две системы движителей - подъемных и маршевых, каждая из которых работает только в одном режиме. Недостатком такой конструкции является высокий относительный вес двигательной установки, а также ухудшение аэродинамических качеств за счет создания дополнительного сопротивления не задействованными движителями.
Известны так называемые «тилтроторы», обеспечивающие изменение режима полета за счет отклонения движителей от вертикальной плоскости.
Также известны летательные аппараты обеспечивающие изменение режима полета за счет вращения частей крыла, на которых установлены воздушные движители.
Недостатками указанных конструкций летательных аппаратов является неустойчивость полета в переходных режимах, конструктивная сложность и высокая масса механизмов обеспечивающих отклонение воздушных движителей или частей крыла. Указанные конструкции также плохо масштабируются, так как при увеличении массо-габаритных характеристик возрастают гироскопические моменты движителей, которые должны конструктивно отклоняться относительно вертикальной плоскости.
Известны так называемые «тейл-ситтеры», которые также получили применение в беспилотной авиации, однако указанные системы, как правило, обладают малой относительной грузоподъемностью и не способны обеспечить вертикальную посадку в силу большой парусности в режимах взлета, посадки и висения.
Таким образом, общими недостатками перечисленных выше конструкций конвертопланов является нестабильность полета летательного аппарата при совершении перехода из вертикального режима в горизонтальный и обратно, а также сложность балансировки центра тяжести летательного аппарата, сложность управления, низкая надежность.
В качестве наиболее близких аналогов настоящего изобретения были оторбраны следующие запатентованные технические решения, ставшие известными авторам.
Из публикации патентной заявки WO 2015115913 A1 (мпк: В64С 39/04; В64С 1/26; В64С 3/32) известен многоцелевой самолет, имеющий два фюзеляжа, включающий центральную панель крыла, которая прикрепляется с возможностью отсоединения на каждом из фюзеляжей и расположена между ними. При этом центральная панель включает гондолу имеющую отсек для хранения различных предметов оборудования, а также двигатель, устанавливаемый спереди и (или) сзади центральной панели.
Многоцелевой самолет в соответствии с публикацией WO2015115913A1 также как и заявляемое изобретение, является многоцелевым и в предпочтительном варианте исполнения является беспилотной системой, также имеет два фюзеляжа (несущих элемента), к наружным сторонам которых присоединены части крыла, заднее крыло, закрепленное между фюзеляжами, съемную гондолу. Однако в отличие от упомянутого многоцелевого самолета, настоящее изобретение не имеет центральной панели крыла, образующей центроплан с наружными частями первого крыла.
Известен летательный аппарат по патенту US 9296478 B2 (мпк: В64С 39/00; В64С 39/04), имеющий по меньшей мере, два фюзеляжа, а также первое крыло, включающее, по меньшей мере, две части крыла, которые не соединяются между собой. В соответствии с описанием патента US9296478B2, части первого крыла, ответвляются от наружной стороны фюзеляжа, и направлены наружу, при этом второе крыло располагается между внутренними сторонами фюзеляжей. Первое крыло и второе крыло, расположены с относительным смещением в X-Z плоскости. В соответствии с описанием к патенту US 9296478 B2 под термином «фюзеляж» или «фюзеляж самолета» понимается конструктивный элемент летательного аппарата, который преимущественно несет полезную или конструктивную нагрузку, а необходимая подъемная сила обеспечивается первым и вторым крылом.
Заявляемое изобретение также как летательный аппарат по патенту US 9296478 B2 содержит два или более несущих элемента (фюзеляжа); первое крыло, включающее две части крыла, расположенные на наружных сторонах несущих элементов (фюзеляжей); второе крыло, расположенное между внутренними сторонами двух несущих элементов (фюзеляжей). При этом первое и второе крыло также расположены со смещением друг относительно друга в X-Z плоскости.
Известен многодвигательный электросамолет короткого взлета и посадки по патенту RU 2554043 C1 (мпк: B64D 27/24; В64С 39/08; B60L 11/02), который включает электродвигатели с тянущими винтами мотогондол, при этом тянущие винты размещены на консолях крыла. С целью упрощения конструкции и исключения узлов отклонения больших винтов, повышения несущей способности крыльев и уменьшения их сопротивления, первое крыло с мотогондолами больших толкающих винтов, смонтировано с углом установки +30 и с положительной деградацией по отношению к первому крылу, имеющему при крейсерском полете +60 и положительный угол поперечного V, улучшающего в многовинтовой движительной системе возможность выполнения укороченного взлета.
Самолет по патенту RU 2554043 C1, также как настоящее изобретение, имеет многодвигательную силовую установку, обеспечивающую распределенную тягу, с первым и вторым рядами двигателей с движителями, при этом движители, имеют отличные от вертикальной плоскости углы отклонения, обеспечивая разницу тяги и достижение максимальных составляющих взлетной тяги для движения вперед и вверх.
Однако самолет по патенту RU 2554043 C1, обеспечивает только короткий взлет и посадку, а также имеет сложную гибридную силовую установку не пригодную для малой авиации и беспилотных систем.
Известен конвертоплан по патенту RU 2446078 С2 (мпк В64С 37/00), который содержит два фюзеляжа, переднее горизонтальное межфюзеляжное оперение, заднее межфюзеляжное горизонтальное оперение и межфюзеляжный центроплан, при этом крыло состоит из консольных частей, жестко закрепленных на фюзеляжах. При этом центроплан выполнен с возможность поворота по углу атаки более чем на 90 градусов.
Изобретение по патенту RU 2446078 С2, также как и настоящее изобретение, имеет два фюзеляжа (несущих элемента), соединенных между собой образуя замкнутый силовой контур, крылья горизонтального оперения, состоящие из консольных частей, жестко закрепленных на фюзеляжах (несущих элементах). Аналог по патенту RU 2446078 С2 также направлен на решение технической проблемы связанной с неустойчивостью полета известных конструкций конвертопланов.
В отличие от изобретения по патенту RU 2446078 С2 настоящее изобретение не имеет переднего межфюзеляжного оперения и центроплана, вместо поворотных винтомоторных групп, в настоящем изобретении использованы воздушные движители, расположенные под фиксированным углом, а замкнутый силовой контур обеспечивается преимущественно за счет поперечных элементов, не имеющих аэродинамических поверхностей.
Одной из целей группы изобретений является создание летательного аппарата горизонтального полета с вертикальным взлетом и посадкой, обеспечивающего аэродинамическую стабильность полета при выполнении перехода из вертикального режима полета в горизонтальный режим полета и обратно, а также не содержащего сложных механизмов, приводов и передач для выполнения перехода из вертикального режима полета в горизонтальный и обратно.
Другой целью настоящего изобретения является создание конструкции несущей платформы летательного аппарата горизонтального полета с вертикальным взлетом и посадкой, как для пилотируемых, так и для беспилотных воздушных систем, одновременно пригодной как для вертикального взлета и посадки, так и для посадки по самолетному.
Решение первой задачи достигается за счет конструкции летательного аппарата горизонтального полета с вертикальным взлетом и посадкой в которой, по крайней мере, одно горизонтальное крыло не имеет центральной части, а двигатели с воздушными движителями установлены под фиксированным углом к вертикальной плоскости, при этом двигатели с воздушными движителями расположены в два и более ряда вдоль продольной оси летательного аппарата. При этом, величина угла отклонения каждого ряда двигателей с воздушными движителями от вертикальной плоскости пропорциональна величине расстояния между соответствующим рядом двигателей с воздушными движителями и центром тяжести летательного аппарата. При этом относительное расстояние между центром тяжести и рядами двигателей с воздушными движителями выбирается исходя из обеспечения равных составляющих подъемной силы на каждом из рядов двигателей с воздушными движителями, расположенных спереди и сзади относительно центра тяжести летательного аппарата.
Таким образом, предложенный в настоящем изобретении летательный аппарат горизонтального полета с вертикальным взлетом и посадкой обеспечивает:
- стабильность летательного аппарата в вертикальном режиме взлета и посадки;
- взаимную компенсацию реактивных моментов воздушных движителей;
- возможность изменения векторов подъемных сил различных рядов воздушных движителей в вертикальной плоскости с целью управления по крену и тангажу летательного аппарата;
- возможность изменения реактивных моментов воздушных движителей для обеспечения управления по рысканию летательного аппарата;
- обеспечивает масштабируемость летательного аппарата.
Настоящее изобретение поясняется с помощью чертежей.
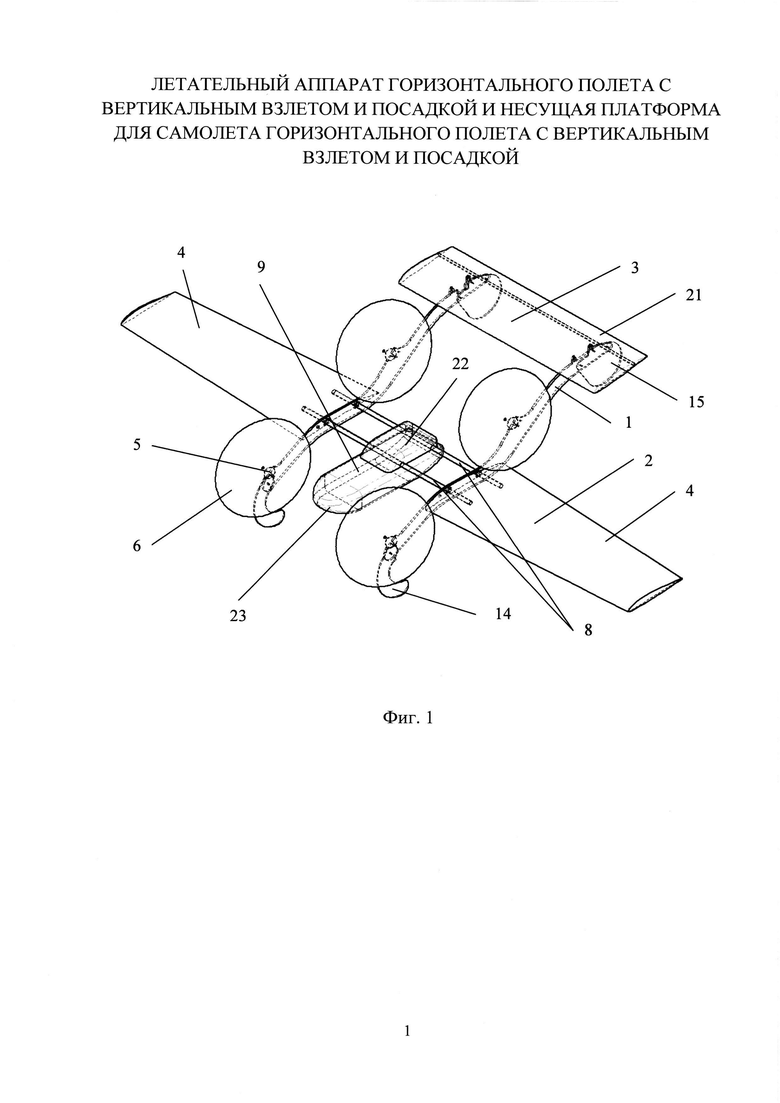
На фигуре 1 показан трехмерный общий вид летательного аппарата горизонтального полета с вертикальным взлетом и посадкой;
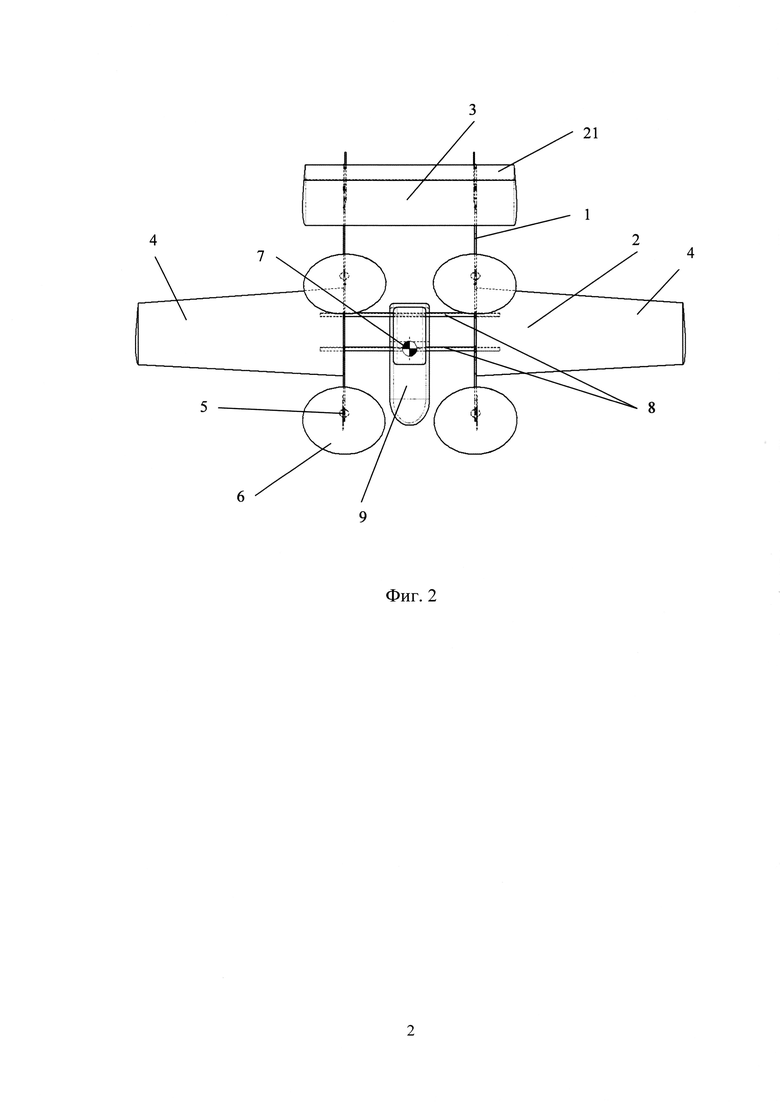
На фигуре 2 показан вид сверху летательного аппарата горизонтального полета с вертикальным взлетом и посадкой;
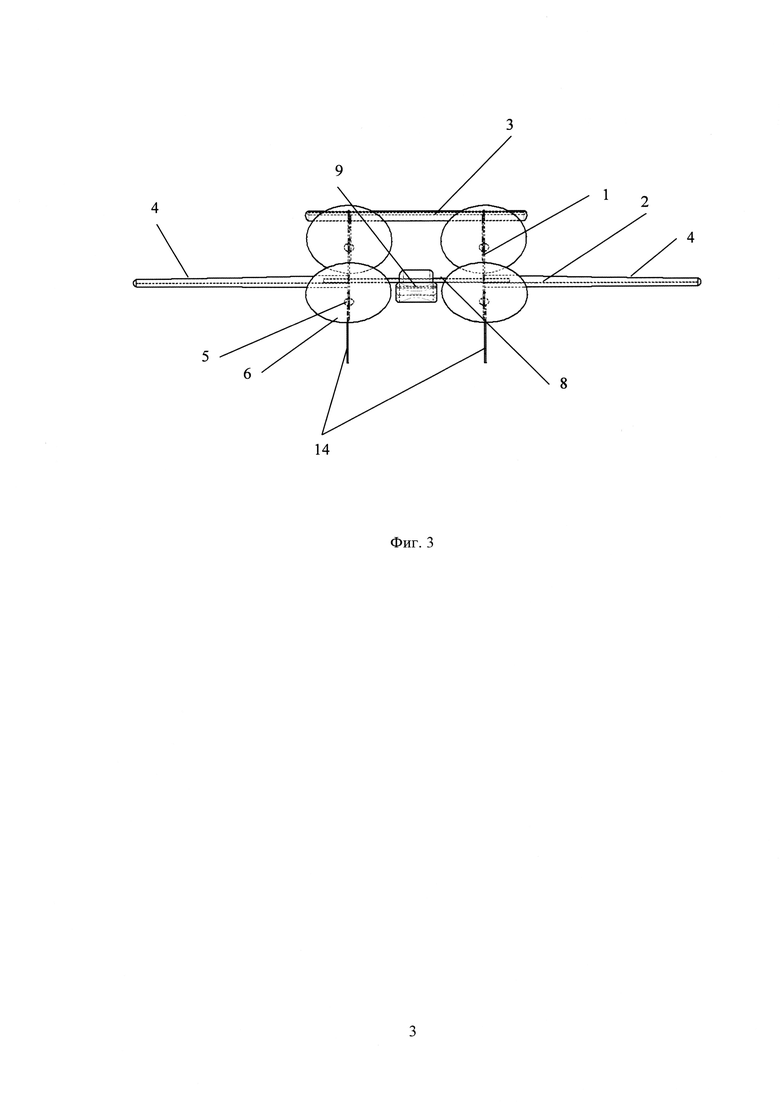
На фигуре 3 показан вид спереди летательного аппарата горизонтального полета с вертикальным взлетом и посадкой;
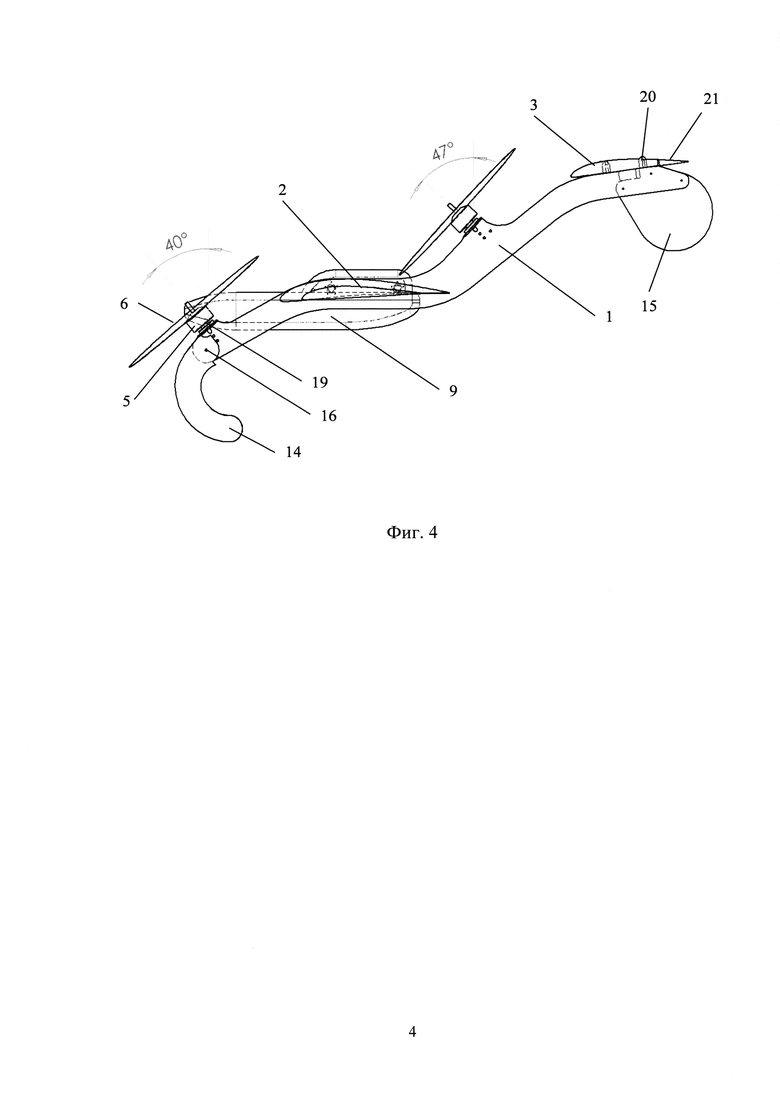
На фигуре 4 показан вид сбоку летательного аппарата горизонтального полета с вертикальным взлетом и посадкой;
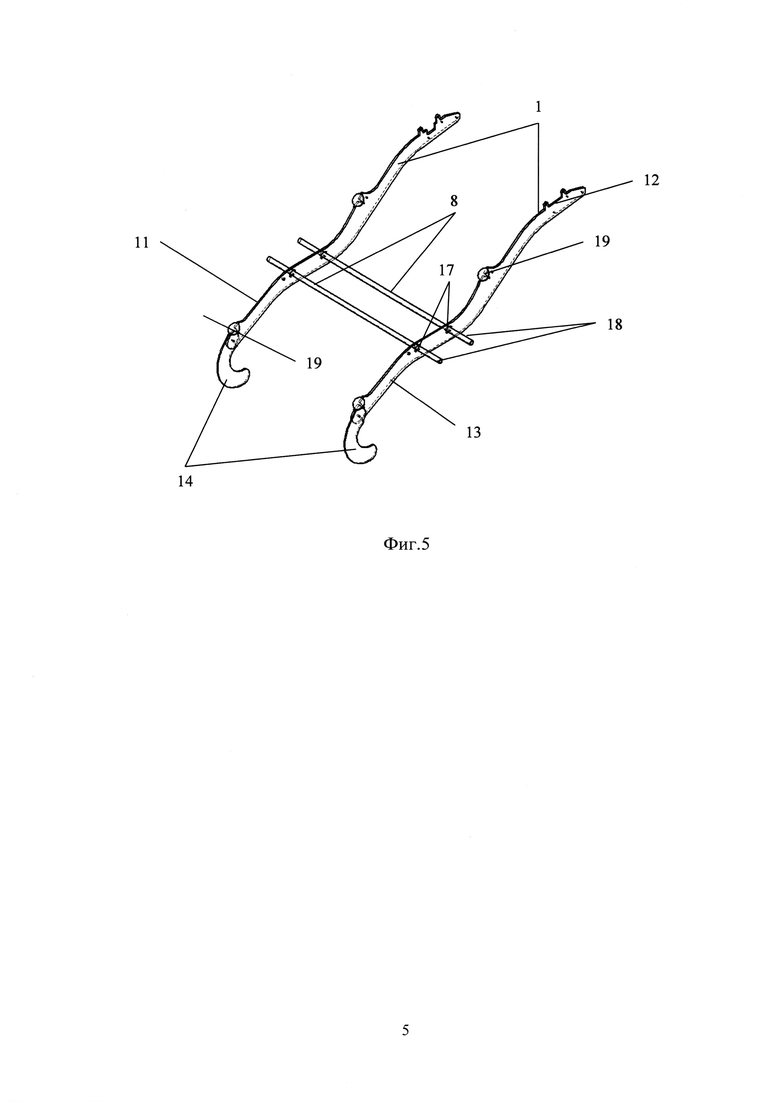
На фигуре 5 показан трехмерный общий вид несущей платформы летательного аппарата горизонтального полета с вертикальным взлетом и посадкой;
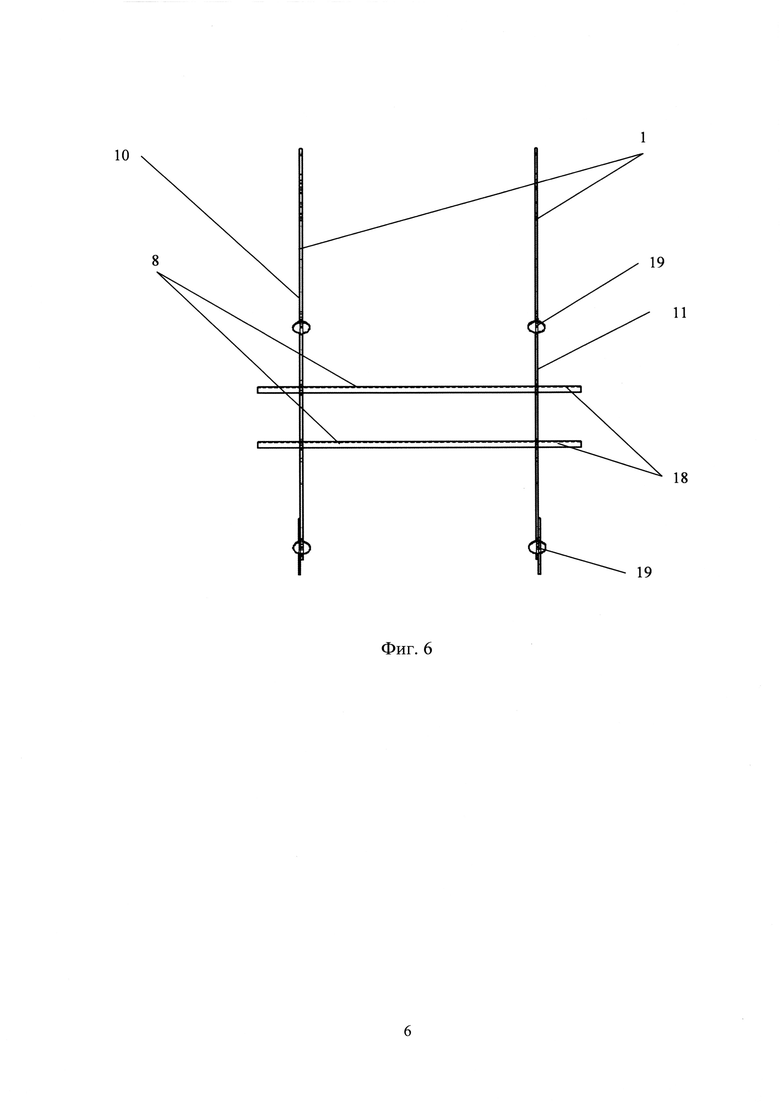
На фигуре 6 показан вид сверху несущей платформы летательного аппарата горизонтального полета с вертикальным взлетом и посадкой;
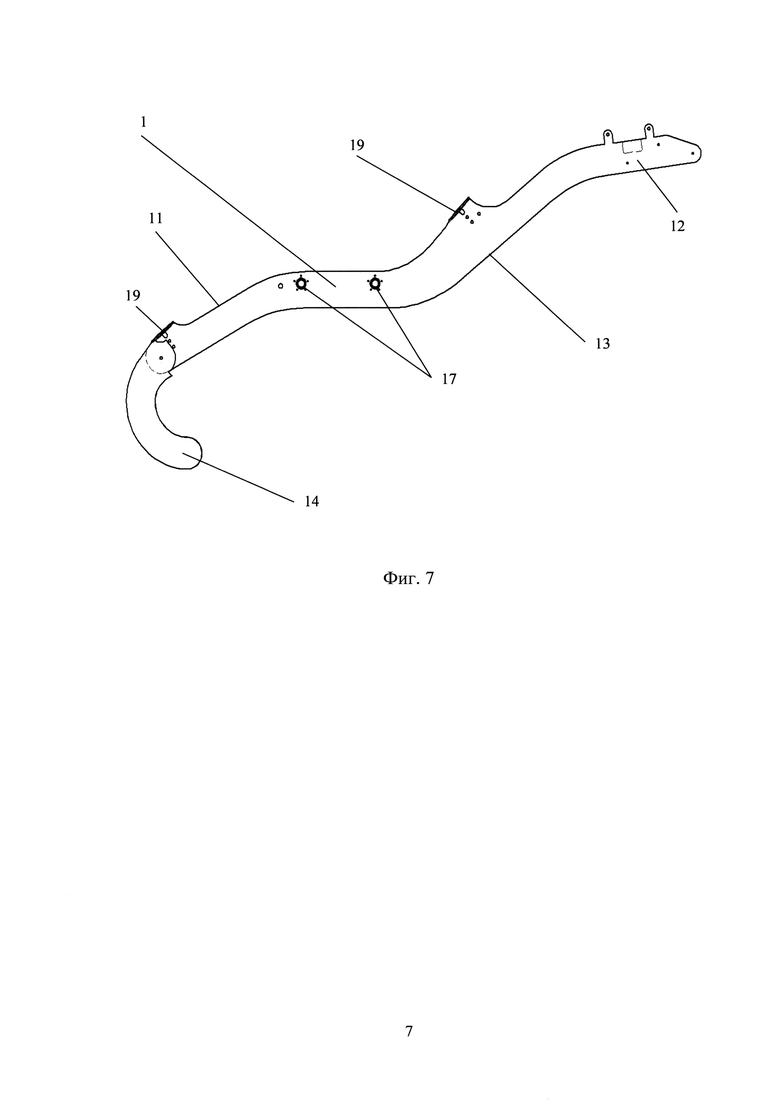
На фигуре 7 показан боковой вид продольного несущего элемента несущей платформы летательного аппарата горизонтального полета с вертикальным взлетом и посадкой;
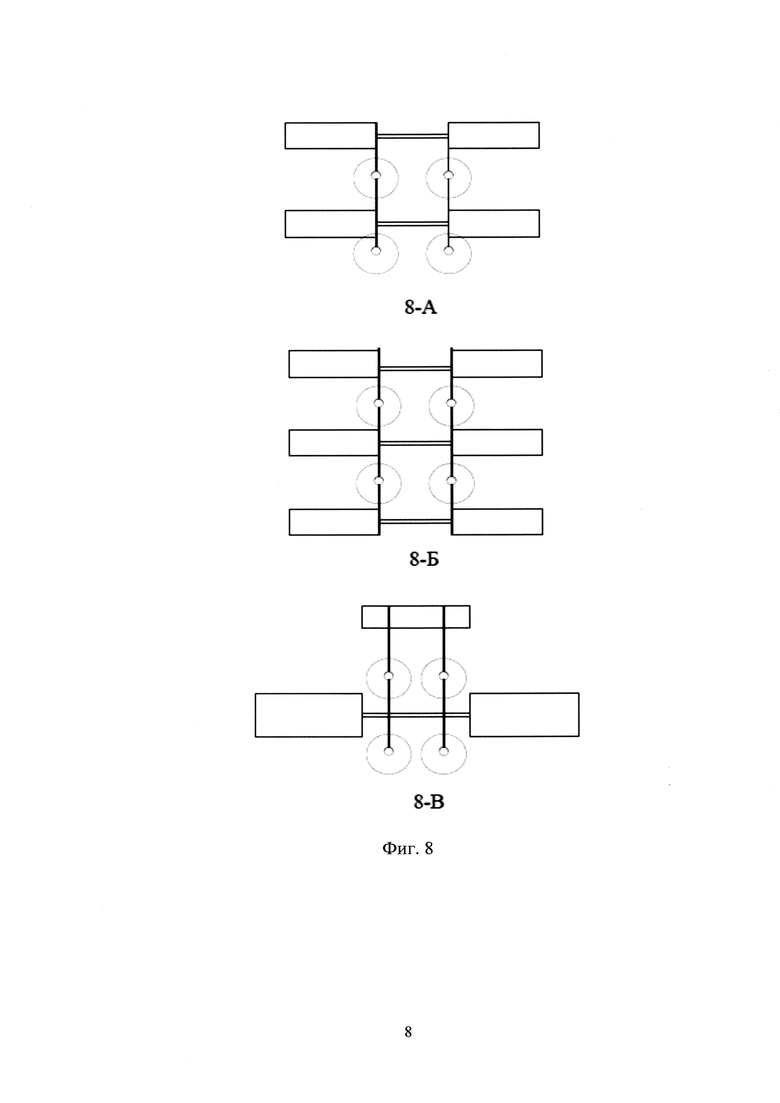
На фигуре 8 показан вид сверху возможных вариантов осуществления летательного аппарата горизонтального полета с вертикальным взлетом и посадкой с различными конфигурациями горизонтального крыла.
Раскрытие сущности изобретения
Летательный аппарат горизонтального полета с вертикальным взлетом и посадкой содержит:
Два или более продольных несущих элемента - 1, которые разнесены друг относительно друга.
По крайней мере, два расположенных вдоль продольной оси летательного аппарата горизонтальных крыла 2 и 3. При этом, по крайней мере, одно горизонтальное крыло - 2 состоит из правой и левой не соединенных между собой частей крыла - 4, консольно установленных на внешних сторонах боковых продольных несущих элементов - 1.
Многодвигательную силовую установку, состоящую из четырех и более двигателей - 5 с воздушными движителями - 6. Двигатели - 5 устанавливаются в верхней части продольных несущих элементов - 1 под фиксированным углом к вертикальной плоскости, при этом двигатели - 5 размещаются в два или более ряда вдоль продольной оси летательного аппарата.
При этом каждый ряд двигателей - 5 устанавливается впереди каждого горизонтального крыла 2 и 3 летательного аппарата, на расстоянии, обеспечивающем минимальное влияние воздушных потоков создаваемых воздушными движителями - 6 на аэродинамические плоскости соответствующего горизонтального крыла.
При этом, величина угла отклонения каждого ряда двигателей - 5 с воздушными движителями - 6 от вертикальной плоскости пропорциональна величине расстояния между соответствующим рядом двигателей - 5 с воздушными движителями - 6 и центром тяжести - 7 летательного аппарата. При этом относительное расстояние между центром тяжести и рядами двигателей с воздушными движителями - 5 выбирается исходя из обеспечения равных составляющих подъемной силы на каждом из рядов двигателей - 5 с воздушными движителями - 6, расположенных спереди и сзади относительно центра тяжести - 7 летательного аппарата.
Продольные несущие элементы - 1 соединены между собой в замкнутый силовой контур, посредством не менее двух поперечных элементов - 8.
Продольными несущими элементами - 1 в соответствии с настоящим изобретением могут быть стенки, балки или фюзеляжи, главным образом обеспечивающие несущую функцию и крепление частей крыла - 4 консольно установленных на внешних сторонах продольных несущих элементов - 1.
Для целей размещение полезной нагрузки и (или) оборудования и (или) экипажа и (или) навигационных и управляющих систем и (или) элементов хранения энергии, и (или) основных и вспомогательных энергетических установок и (или) воздушных движителей, в соответствии с настоящим изобретением могут быть использованы продольные несущие элементы - 1, в случае их выполнения в виде объемных пространственных конструкций, а также (или) гондола - 9, которая может быть установлена в пространстве между продольными несущими элементами - 1.
Двигателями - 5 с воздушными движителями - 6 в соответствии с настоящим изобретением могут быть двигатели с различным принципом действия, включающие тянущие и (или) толкающие воздушные винты и (или) роторы и (или) пропеллеры, обеспечивающие подъемную силу и (или) тягу и (или) толкание летательного аппарата.
Второе горизонтальное крыло - 3, или другое горизонтальное крыло, расположенное в задней части летательного аппарата может быть выполнено в виде центральной части, расположенной между продольными несущими элементами - 1, или в форме верхнего крыла, расположенного между или сверху продольных несущих элементов - 1, либо, в форме левой и правой частей крыла - 3, аналогично первому горизонтальному крылу - 2.
Фиксированный наклон двигателей - 5 с воздушными движителями - 6, или наклон только воздушных движителей - 6 относительно вертикальной плоскости, в соответствии с настоящим изобретением может быть обеспечен, как за счет фиксированного наклона монтажных поверхностей несущих элементов - 1, или за счет фиксированного наклона двигателей - 5 относительно их точек опоры, или за счет фиксированного воздушных движителей - 6 относительно двигателей - 5.
В случае оборудования летательного аппарата гондолой - 9, последняя закрепляется по крайней мере на одном из поперечных элементов - 8.
В зависимости от варианта осуществления изобретения, первое горизонтальное крыло - 2, в частности правая и левая части крыла - 4 и (или) второе горизонтальное крыло - 3, и (или) другое горизонтальное крыло могут содержать механизированные элементы, такие как элерон, предкрылок, закрылок.
Несущая платформа - 10 летательного аппарата горизонтального полета с вертикальным взлетом и посадкой содержит, два и более разнесенных продольных несущих элемента - 1, соединенных в жесткий замкнутый силовой контур при помощи двух и более поперечных элементов - 8, с возможностью включения элементов горизонтального крыла 2,3 и вертикального оперения, включая консольно расположенные на продольных несущих элементах части крыла - 4, а также межфюзеляжные части крыла, кили и стойки.
Продольные несущие элементы - 1 несущей платформы - 10 выполнены из легковесного материала в форме многофункциональных монолитных стенок, переменной, либо постоянной толщины с разновысоким боковым профилем.
Верхние грани - 11 продольных несущих элементов - 1 несущей платформы - 10 за счет конфигурируемой формы образуют монтажные поверхности и вертикальные стойки - 12 для установки элементов горизонтального крыла, оперения, а также двигателей - 5.
Нижние грани - 13 продольных несущих элементов - 1 несущей платформы - 10, за счет конфигурируемой формы образуют передние кили - 14 и задние кили - 15, одновременно являющиеся опорами несущей платформы - 10 и соответственно летательного аппарата.
Таким образом, форма бокового профиля продольных несущих элементов - 1 определяется исходя из требуемых высот, углов и их отношений, для требуемой ориентации летательного аппарата относительно горизонтальной поверхности, расположения элементов крыла, оперения, а также двигателей. Для целей облегчения конструкции несущей платформы - 10, а также придания дополнительных удародемпфирующих качеств при осуществлении посадки летательного аппарата, в вертикальном режиме, а также по самолетному, передние кили - 14 и задние кили - 15, могут быть выполнены в виде отдельных конструктивных элементов, из более легкого и (или) упругого материала. При этом, передние кили - 14 и задние кили - 15 могут иметь конструктивную возможность упругого отклонения от вертикальной плоскости, например за счет установки на шарнирах - 16.
В качестве поперечных элементов - 8 в соответствии с настоящим изобретением могут быть использованы балки или стержни, не имеющие аэродинамических несущих плоскостей и поэтому обеспечивающие минимальное искажение обтекающих летательный аппарат аэродинамических воздушных потоков, либо воздушных потоков создаваемых работающими воздушными движителями - 6.
На боковой поверхности продольных несущих элементов - 1 несущей платформы - 10 могут быть выполнены сквозные отверстия - 17 и (или) слепые отверстия для соединения продольных несущих элементов - 1 и поперечных элементов - 8 в единую конструкцию, а также для монтажа элементов горизонтального крыла, оперения и различного оборудования.
При оснащении несущей платформы горизонтальным крылом - 2, например в виде правой и левой частей - 4, для целей крепления частей крыла - 4, а также обеспечения жесткости горизонтального крыла - 2, один поперечный элемент - 8 содержит удлиненные концы - 18, и устанавливается в плоскости соответствующего горизонтального крыла. При этом удлиненные концы - 18 продолжаются через сквозные отверстия - 17 в продольных несущих элементах - 1 и интегрируются в левую и правую части крыла -4.
Предпочтительный вариант осуществления изобретения
Продольные несущие элементы - 1 в соответствии с предпочтительным вариантом осуществления изобретения выполнены из многослойного армированного полимерного композиционного материала, в форме монолитных стенок с разновысоким боковым профилем переменной толщины.
Верхние грани - 11 продольных несущих элементов - 1, включают места установки двигателей - 5 с воздушными движителями - 6, которые выполнены с наклоном к вертикальной плоскости, и на которых установлены моторамы - 19 для крепления двигателей - 5.
Части крыла - 4, имеют переменное сечение корневой и концевой хорды, с относительной круткой, при этом части крыла - 4 выполнены из полимерного композиционного материала со средним слоем, включающим легковесный заполнитель, продольные и поперечные элементы жесткости, пеналы из углепластика со слепыми каналами открытыми со стороны корневых хорд частей крыла - 4, для установки соответствующих частей крыла на удлиненные концы - 18 поперечных элементов - 8. При этом, в качестве легковесного заполнителя частей крыла - 4 используется пенополистерол, в качестве продольных и поперечных элементов жесткости используются полосы из угольного ровинга.
Второе горизонтальное крыло - 3 выполнено в форме верхнего крыла с центральной частью. Второе горизонтальное крыло - 3 установлено на вертикальных стойках - 12, и закреплено при помощи крепления шип - паз - 20. На задней стороне второго горизонтального крыла - 3 выполнен механизированный руль высоты - 21.
Руль высоты - 21 приводится в действие посредством сервопривода с тягой (на рисунках не показан), который устанавливается на одной из вертикальных стоек - 13, с внутренней стороны продольного несущего элемента - 1 под вторым горизонтальным крылом - 3.
С целью предотвращения аэродинамического затенения второго горизонтального крыла - 3, первое горизонтальное крыло - 2, и второе горизонтальное крыло - 3 выполнены с относительным смещением в вертикальной плоскости, такое смещение выполняется на величину, обеспечивающую свободное течение аэродинамических потоков создаваемых работающими воздушными движителями - 6, соответствующего диаметра.
В качестве двигателей - 5 в соответствии с предпочтительным вариантом осуществления изобретения, использованы внешнероторные электродвигатели.
Соединение продольных несущих элементов - 1 в единый силовой контур, обеспечивается четырьмя поперечными элементами - 8. Поперечные элементы - 8, являются полыми тонкостенными трубками из алюминиевого сплава. При этом два поперечных элемента - 8, располагаются в одной плоскости с первым горизонтальным крылом - 2 и имеют удлиненные концы - 17.
Для соединения продольных несущих элементов - 1, частей крыла 4 и двух поперечных элементов - 8, расположенных в плоскости первого горизонтального крыла - 2, в единую конструкцию, продольные несущие элменты - 1, имеют сквозные отверстия-17, через которые продеваются удлиненные концы - 17, поперечных элементов-8. Для крепления продольных несущих элементов - 1, и поперечных элементов - 8, обеспечения жесткости конструкции, а также снижения местных напряжений, сквозные отверстия - 17 содержат закладные направляющие элементы - 23, представляющие цельнолитые металлические кольцевые элементы с фланцем. Поперечные элементы - 8 фиксируются в направляющих элементах при помощи штифтов.
Гондола - 9 в соответствии с предпочтительным вариантом осуществления изобретения, содержит раму с направляющими - 22, а также корпус - 23. Корпус - 23 представляет полую тонкостенную герметичную конструкцию обтекаемой формы, изготовленную из пластика. Внутри корпуса - 23 размещается элемент хранения энергии, а также блок управления летательным аппаратом. Гондола - 9 закрепляется на двух поперечных элементах - 8, расположенных в плоскости первого горизонтального крыла - 2, при помощи направляющих.
Закрепление и фиксация правой и левой частей крыла - 4 на продольных несущих элементах - 1 осуществляется посредством замка - защелки, который включает металлический стержень и ответный канал с подпружиненным фиксирующим элементом.
В соответствии с предпочтительным вариантом изобретения передние кили - 14, являются отдельными конструктивными элементами, которые консольно установлены спереди каждого продольного несущего элемента - 1 на шарнирах - 16, с возможностью упругого отклонения под нагрузкой в сторону, противоположную движению летательного аппарата при осуществлении посадки по-самолетному. Передние кили - 14 имеют изогнутую форму и выполняются из тонкостенного литого поликарбоната или другого материала с подобными свойствами.
Для ограничения вращения передних килей - 14 в направлении движения летательного аппарата, на их верхних гранях выполнены ступенчатые уступы, которые в нормальном положении упираются в моторамы - 18, первого ряда двигателей - 5. Таким образом, передние кили -14 обеспечивают демпфирование ударных нагрузок при посадке летательного аппарата, как при вертикальной посадке, так и при посадке по самолетному.
Задние кили - 15, представляют отдельно конструктивные элементы, неподвижно закрепляемые на задних концах продольных несущих элементов - 1. Задние кили - 15 имеют скругленную в плане форму, и выполняются из ячеистого пластика либо другого материала, снижающего общий вес конструкции летательного аппарата.
Летательный аппарат горизонтального полета с вертикальным взлетом и посадкой работает следующим образом:
Исходное положение: летательный аппарат располагается на поверхности взлетно-посадочной площадки, продольная ось летательного аппарата ориентирована параллельно поверхности взлетно-посадочной площадки, двигатели - 5 с воздушными движителями - 6 выключены;
Сначала дистанционно оператором, либо системой управления в автоматическом режиме, осуществляется одновременный запуск двигателей - 5;
Затем, при достижении заданного значения суммарной тяги воздушных движителей - 6, летательный аппарат открывается от поверхности взлетно-посадочной площадки, при этом продольная ось летательного аппарата отклоняется на положительный угол, при этом воздушные движители - 6 принимают горизонтальное положение, выполняется вертикальный взлет летательного аппарата и набор требуемой высоты.
Затем, оператором или системой управления в автоматическом режиме, выполняется изменение отношения частот вращения воздушных движителей - 6 между передним и задним рядами двигателей - 5, осуществляется изменение угла наклона летательного аппарата по тангажу, продольная ось летательного аппарата выравнивается по горизонту, при этом воздушные движители - 6, а также аэродинамические поверхности переднего горизонтального крыла - 2 и заднего горизонтального крыла - 3 отклоняются от горизонта с положительным углом атаки, таким образом летательный аппарат переходит в горизонтальный режим полета и набирает горизонтальную скорость.
После завершения перехода летательного аппарата в режим горизонтального полета, углы атаки первого горизонтального крыла - 2 и второго горизонтального крыла - 3 принимают значения от 0 до 5 градусов, что характерно для летательных аппаратов с традиционной самолетной схемой. Воздушные движители - 6, имеющие фиксированный угол отклонения от вертикальной плоскости одновременно обеспечивают вертикальную и горизонтальную составляющую подъемной силы. Управление горизонтальной тягой летательного аппарата обеспечивается за счет распределения суммарной тяги между их первым и вторым рядами двигателей - 5 с воздушными движителями - 6. Управление летательным аппаратом по высоте обеспечивается за счет механизированного руля высоты - 21, либо одновременно рулем высоты - 21 и распределением суммарной тяги первого и второго рядов двигателей - 5 с воздушными движителями - 6. Управление летательным аппаратом по курсу обеспечивается за счет изменения положения по крену и по тангажу, также как и у традиционного летательного аппарата самолетной схемы. При этом, воздушные движители - 6 формирует поток косого обтекания по отношению к первому горизонтальному крылу - 2 и второму горизонтальному крылу - 3.
Переход летательного аппарата из горизонтального режима полета в вертикальный режим полета осуществляется аналогичным образом в обратном порядке.
Летательный аппарат горизонтального полета с вертикальным взлетом и посадкой, выполненный на несущей платформе - 10, в соответствии с предложенным вариантом осуществления изобретения является многофункциональной беспилотной воздушной системой с модульной разборной конструкцией. Предложенный летательный аппарат горизонтального полета с вертикальным взлетом и посадкой может быть использован для обеспечения таких видов хозяйственной и экономической деятельности как: логистика, аэрофотосъемка, осуществление мониторинга в режиме реального времени, доставка различных грузов, в том числе потребительских товаров, денежных средств; биоматериалов и медицинского оборудования в экстренных и чрезвычайных ситуациях. Для целей транспортировки набор элементов летательного аппарата горизонтального полета с вертикальным взлетом и посадкой в разобранном виде может быть упакован в специальные ящики с вкладными формами из пористого материала.
Несущая платформа - 10 летательного аппарата горизонтального полета с вертикальным взлетом и посадкой в соответствии с предложенным вариантом осуществления изобретения может быть использована в качестве несущей платформы для многодвигательных летательных аппаратов вертикального взлета и посадки коптерного типа, для летательных аппаратов самолетного типа, а также для летательных аппаратов сочетающих признаки самолета и вертолета.
Другие возможные варианты осуществления летательного аппарата горизонтального полета с вертикальным взлетом и посадкой
Предлагаемый в соответствии с настоящим изобретением летательный аппарат горизонтального полета с вертикальным взлетом и посадкой может иметь различные комбинации расположения горизонтального крыла.
На фигуре 8-А показан вариант осуществления изобретения в соответствии с которым переднее горизонтальное крыло - 2 и заднее горизонтальное крыло - 3, не имеют центральной части, и выполнены в виде не соединяющихся друг с другом правой и левой частей крыла.
На фигуре 8-Б показан вариант осуществления изобретения в соответствии с которым летательный аппарат горизонтального полета с вертикальным взлетом и посадкой имеет первое, второе и третье горизонтальное крыло, которые не имеют центральной части и выполнены в виде не соединяющихся друг с другом правой и левой частей крыла.
На фигуре 8-В показан вариант осуществления изобретения в соответствии с которым летательный аппарат горизонтального полета с вертикальным взлетом и посадкой имеет переднее горизонтальное крыло без центральной части выполненное в виде не соединяющихся друг с другом правой и левой частей крыла, а также заднее горизонтальное крыло, имеющее центральную часть и выполняющее функцию стабилизатора, при этом части первого горизонтального крыла установлены таким образом, что между их корневыми хордами и продольными несущими элементами образуется воздушный зазор. При таком варианте осуществления изобретения полностью устраняется влияние воздушных потоков создаваемых воздушными движителями на аэродинамические плоскости частей крыла.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2015 |
|
RU2605466C1 |
| МОДУЛЬНАЯ КОНСТРУКЦИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2017 |
|
RU2681423C1 |
| Летательный аппарат вертикального взлета и посадки | 2018 |
|
RU2700154C1 |
| Беспилотный летательный аппарат вертикального взлёта и посадки и способ его изготовления | 2023 |
|
RU2819460C1 |
| ПРЕОБРАЗУЕМЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ (ВАРИАНТЫ) | 2014 |
|
RU2550589C1 |
| САМОЛЁТ ВЕРТИКАЛЬНОГО ВЗЛЁТА И ПОСАДКИ | 2018 |
|
RU2742496C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ С ГИБРИДНОЙ СИЛОВОЙ УСТАНОВКОЙ | 2017 |
|
RU2724940C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2014 |
|
RU2574873C1 |
| САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ БЕТЕНЕВА-РОГОВА | 1998 |
|
RU2141432C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЁТА И ПОСАДКИ | 2003 |
|
RU2244661C2 |
Изобретение относится к области авиации, в частности к конструкциям многовинтовых летательных аппаратов вертикального взлета и посадки. Летательный аппарат горизонтального полета с вертикальным взлетом и посадкой содержит два и более разнесенных продольных несущих элемента, два и более расположенных вдоль продольной оси летательного аппарата горизонтальных крыла, многодвигательную силовую установку. Горизонтальное крыло состоит из частей, которые консольно установлены на внешних сторонах продольных несущих элементов. Силовая установка состоит из четырех и более двигателей с воздушными движителями, которые установлены под фиксированным углом к вертикальной плоскости в два и более ряда относительно продольной оси летательного аппарата. Несущая платформа летательного аппарата содержит два и более разнесенных продольных несущих элемента, соединенных в жесткий замкнутый силовой контур при помощи двух и более поперечных элементов, которые не имеют аэродинамических несущих плоскостей. Обеспечивается стабильность полета летательного аппарата при переходе из вертикального режима полета в горизонтальный и обратно. 2 н.п. ф-лы, 8 ил. 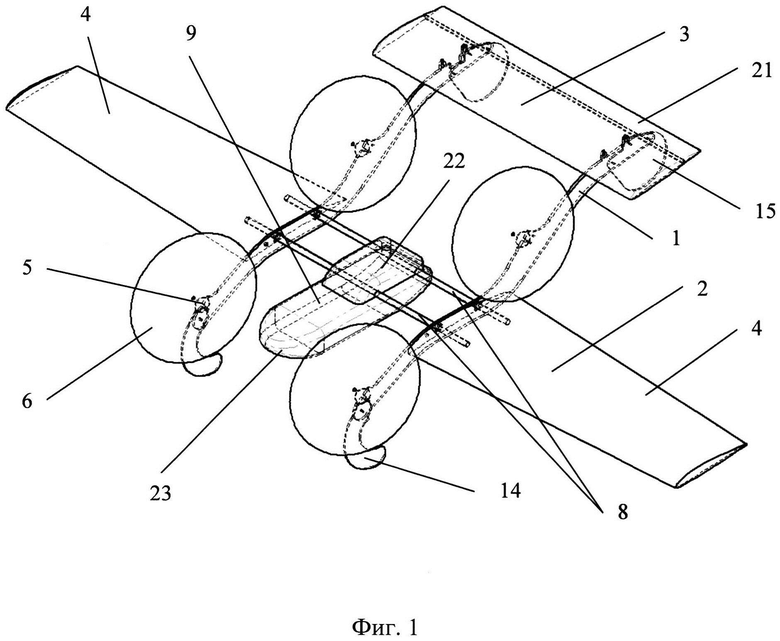
1. Летательный аппарат горизонтального полета с вертикальным взлетом и посадкой содержит два и более разнесенных продольных несущих элемента, два и более расположенных вдоль продольной оси летательного аппарата горизонтальных крыла, многодвигательную силовую установку, при этом по крайней мере одно горизонтальное крыло состоит из правой и левой не соединенных между собой частей крыла, которые консольно установлены на внешних сторонах продольных несущих элементов, отличающийся тем, что многодвигательная силовая установка состоит из четырех и более двигателей с воздушными движителями, которые устанавливаются в верхней части продольных несущих элементов под фиксированным углом к вертикальной плоскости, при этом двигатели с воздушными движителями размещаются в два или более ряда вдоль продольной оси летательного аппарата, при этом каждый ряд двигателей с воздушными движителям устанавливается впереди каждого горизонтального крыла летательного аппарата на расстоянии, обеспечивающем минимальное влияние воздушных потоков, создаваемых воздушными движителями, на аэродинамические плоскости соответствующего горизонтального крыла, при этом величина угла отклонения каждого ряда двигателей с воздушными движителями от вертикальной плоскости пропорциональна величине расстояния между соответствующим рядом двигателей с воздушными движителями и центром тяжести летательного аппарата, при этом относительное расстояние между центром тяжести и рядами двигателей с воздушными движителями выбирается исходя из обеспечения равных составляющих подъемной силы на каждом из рядов двигателей с воздушными движителями, расположенных спереди и сзади относительно центра тяжести летательного аппарата.
2. Несущая платформа летательного аппарата горизонтального полета с вертикальным взлетом и посадкой содержит два и более разнесенных продольных несущих элемента, соединенных в жесткий замкнутый силовой контур при помощи двух и более поперечных элементов, с возможностью включения элементов горизонтального крыла и вертикального оперения, включая консольно расположенные на продольных несущих элементах части крыла, а также межфюзеляжные части крыла, кили и стойки, отличающаяся тем, что поперечные элементы не имеют аэродинамических несущих плоскостей, обеспечивая минимальное искажение обтекающих летательный аппарат аэродинамических воздушных потоков, а продольные несущие элементы выполнены из легковесного материала в форме многофункциональных монолитных стенок переменной либо постоянной толщины с разновысоким боковым профилем, при этом верхние грани продольных несущих элементов образуют монтажные поверхности и вертикальные стойки для установки элементов горизонтального крыла, оперения, а также двигателей, а нижние грани продольных несущих элементов образуют передние кили и задние кили, одновременно являющиеся опорами несущей платформы и соответственно летательного аппарата.
| ИНСТРУМЕНТ ДЛЯ УЛЬТРАЗВУКОВОГО ВЫРЕЗАНИЯ НЕСКОЛЬКИХ ЗАГОТОВОК ИЗ ТВЕРДЫХ И ХРУПКИХМАТЕРИАЛОВ | 0 |
|
SU180474A1 |
| US 20160297520 A1, 13.10.2016 | |||
| US 20170057630 A1, 02.03.2017 | |||
| US 20180305008 A1, 25.10.2018 | |||
| МНОГОВИНТОВОЙ ПРЕОБРАЗУЕМЫЙ БЕСПИЛОТНЫЙ ВЕРТОЛЕТ | 2014 |
|
RU2550909C1 |

