Область техники, к которой относится изобретение
Изобретение относится к области лазерной маркировки продукции, а именно к способу и системе лазерной маркировки движущихся неориентированных объектов, и предназначено для встраивания в производственные линии для поштучной лазерной маркировки продукции.
Уровень техники
Лазерная маркировка материалов является наиболее быстрым и эффективным способом нанесения маркировки на продукцию в больших объемах. При этом насущной задачей в настоящее время является обеспечение гибкости и масштабируемости процесса лазерной маркировки продукции и его адаптируемости к существующим производственным линиям.
Из уровня техники известны способ и система лазерной маркировки продукции (см. CN 117193120 A, кл. МПК G05B 19/042, опубл. 08.12.2023). Для решения проблем неточного позиционирования и низкой эффективности производства в методах управления автоматизированным оборудованием в предшествующем уровне техники, предложен многоканальный синхронный метод управления лазерной маркировкой, включающий следующие этапы: S1: когда фотоэлектрический датчик срабатывает при движении очереди продуктов, получают информацию о начальном положении каждого продукта в текущей сработавшей очереди продуктов и запускают энкодер; S2: значение импульса, генерируемого энкодером, синхронно записывается и обновляется информация о начальном положении каждого продукта в сработавшей очереди продуктов; S3: когда каждый продукт в очереди продуктов достигает нескольких предустановленных позиций, соответствующие режимы в предустановленных позициях синхронно запускаются, а затем соответствующие режимы срабатывают соответственно, каждый продукт в заданном положении обрабатывается соответствующим образом; соответствующие режимы включают, но не ограничиваются, режим лазерной маркировки или режим распознавания камеры; S4: когда для каждого продукта в очереди продуктов запускается режим распознавания камеры, камера через заданное время фотографирует продукт и загружает идентификационное изображение, а затем получают информацию о качестве продукта и помечают соответствующий продукт как дефектный; S5: когда каждый продукт в очереди продуктов достигает позиции устранения по очереди, помеченный дефектный продукт удаляется из очереди. Многоканальная синхронная система управления включает в себя контроллер, конвейерную ленту, фотоэлектрический датчик, энкодер, несколько камер и несколько лазерных маркеров, электрически соединенных с контроллером, и электромагнитный клапан отбраковки; при этом фотоэлектрический датчик, энкодер, камеры, лазерные маркеры и электромагнитный клапан отбраковки расположены над конвейерной лентой.
В патенте CN 207028533 U, кл. МПК B41J 2/435; B41J 3/407, опубл. 23.02.2018, раскрыта маркировка крышки бутылок, расположенных в два ряда на конвейере. Маркировка двух рядом стоящих бутылок осуществляется одновременно с помощью двух лазерных головок. Система маркировки крышек включает в себя устройство переноса крышек, расположенное на рабочей платформе, лазер, расположенный над устройством переноса крышек, и устройство распознавания изображений, расположенное в шкафу управления. Устройство подачи крышек состоит из нижней конвейерной ленты и перегородки, которая делит конвейерную ленту на два вмещающих пространства, ширина вмещающего пространства соответствует ширине крышки бутылки, при этом крышки бутылки сохраняют стабильность. Лазер имеет две лазерные головки, расположенные рядом. Устройство распознавания изображений идентифицирует крышку, входящую в область маркировки, и вычисляет данные о положении. Когда данные о положении крышки и положение маркировки лазерной головки совпадают, контроллер управляет лазерной головкой для маркировки двух рядов бутылочных крышек внизу.
В патентном документе CN 109278434 A, кл. МПК В41М 5/24, опубл. 29.01.2019, раскрыт способ онлайн лазерной маркировки трех бутылочных крышек с помощью лазера, имеющего три головки, что значительно повышает эффективность лазерной маркировки. Способ включает в себя следующие шаги: 1) крышка подается по конвейеру в заранее определенную зону лазерной маркировки под лазером, имеющем три лазерные головки; 2) устройство распознавания изображений, расположенное над зоной лазерной маркировки, выполняет распознавание изображений на крышке, входящей в зону лазерной маркировки, при этом скорость каждого набора из трех крышек управляется контроллером, рассчитывается интервал между каждой крышкой из набора; 3) выполняют сравнение положения каждой крышки непосредственно под каждой лазерной головкой и положения, распознанного устройством распознавания изображений; 4) при совпадении положений контроллер запускает лазер для выполнения маркировки. Таким образом, три лазерные головки могут маркировать три крышки в одно и то же время.
В патенте CN 205852064 U, кл. МПК B23K 26/362; B23K 26/70; B23K 37/04; B23K 37/047, опубл. 04.01.2017, раскрыта автоматическая маркировочная машина, оснащенная двумя узлами лазерной маркировки, расположенными по разные стороны от конвейерной линии, чтобы осуществлять маркировку продукции двухсторонним знаком.
Ближайшими аналогами являются патенты RU 2808569 C1, кл. МПК В41М 5/24, B23K 26/035, опубл. 29.11.2023, RU 217736 U1, кл. МПК В41М 5/24, B23K 26/035, опубл. 14.04.2023. В патентах раскрыта система лазерной маркировки, содержащая блок управления, лазерный маркиратор, связанный с блоком управления, средство для размещения и перемещения объектов, модуль обнаружения маркируемого объекта, который размещается перед узлом лазерной маркировки и передает данные в блок управления, при этом лазерный маркиратор включает: модуль определения ориентации, содержащий комплект технического зрения, связанный с блоком управления, блок управления лазерным маркиратором и связанный с ним импульсный источник лазерного излучения, связанный с блоком управления, модуль обнаружения маркируемого объекта на узле и модуль определения скорости перемещения маркируемого объекта на узле. При этом достигается повышение качества маркировки движущихся неориентированных объектов.
Однако, решения из уровня техники не обеспечивают гибкость и масштабируемость процесса лазерной маркировки продукции и его адаптируемость к существующим производственным линиям.
Технической проблемой является обеспечение гибкости и масштабируемости процесса лазерной маркировки продукции и его адаптируемости к существующим производственным линиям в зависимости от необходимой производительности лазерной маркировки, а также скорости конвейера, объема выпуска продукции и т.д.
Раскрытие сущности изобретения
Решаемая настоящим изобретением техническая задача состоит в обеспечении гибкости и масштабируемости процесса лазерной маркировки продукции и его адаптируемости к существующим производственным линиям.
Технический результат, достигаемый настоящим изобретением, заключается в обеспечении гибкости и масштабируемости процесса лазерной маркировки продукции и его адаптируемости к существующим производственным линиям одновременно с повышением скорости и точности процесса лазерной маркировки.
Вышеуказанный технический результат обеспечивается за счет способа лазерной маркировки движущихся объектов, который включает следующие этапы:
- начальное обнаружение маркируемых объектов, расположенных последовательно и перемещаемых на средстве для размещения и передвижения объектов;
- осуществление счета обнаруженных маркируемых объектов;
- на основании полученных данных счета и в зависимости от количества узлов лазерной маркировки распределение маркируемых объектов по узлам лазерной маркировки, расположенным последовательно на участке лазерной маркировки средства для размещения и передвижения объектов, причем количество узлов лазерной маркировки выбирают в зависимости от характеристик средства для размещения и передвижения объектов и/или заданной производительности лазерной маркировки;
- определение начального положения и скорости передвижения маркируемых объектов;
при этом на каждом узле лазерной маркировки для каждого маркируемого объекта, распределенного для соответствующего узла лазерной маркировки, на основе данных обнаружения маркируемого объекта на узле лазерной маркировки, данных распределения маркируемых объектов по узлам лазерной маркировки, начального положения и скорости передвижения маркируемого объекта осуществляют:
- обнаружение маркируемого объекта на узле лазерной маркировки, на который указанный объект распределен;
- получение изображения указанного маркируемого объекта;
- определение пространственного расположения указанного маркируемого объекта на основе полученного изображения;
- определение скорости передвижения указанного маркируемого объекта на узле лазерной маркировки;
- на основе полученных данных пространственного расположения указанного маркируемого объекта с учетом скорости передвижения объекта осуществление лазерной маркировки указанного маркируемого объекта, распределенного для узла лазерной маркировки, перемещаемого на средстве для размещения и передвижения объектов.
При этом гибкость, масштабируемость и адаптируемость при одновременном повышении скорости и точности процесса лазерной маркировки достигаются за счет того, что маркируемые объекты распределяют по двум или более узлам лазерной маркировки, расположенным последовательно на участках лазерной маркировки средства для размещения и передвижения объектов, причем распределение осуществляют на основании данных счета маркируемых объектов и в зависимости от количества узлов лазерной маркировки, причем количество узлов лазерной маркировки выбирают в зависимости от характеристик средства для размещения и передвижения объектов и/или заданной производительности лазерной маркировки, а также достигается за счет того, что в процессе маркировки объекта учитывают пространственное расположение и скорость передвижения маркируемого объекта на каждом узле лазерной маркировки.
Предпочтительно осуществление распределения маркируемых объектов по узлам лазерной маркировки с помощью блока управления лазерной маркировкой.
Целесообразно осуществление начального обнаружения маркируемых объектов и счета маркируемых объектов с помощью датчика счета, расположенного перед узлами лазерной маркировки, и связанного с блоком управления лазерной маркировкой.
Целесообразно осуществление определения начального положения и скорости передвижения маркируемых объектов с помощью датчика скорости, расположенного на средстве для размещения и перемещения объектов, и связанного с блоком управления лазерной маркировкой.
Целесообразно осуществление обнаружения маркируемого объекта на участке лазерной маркировки с помощью датчика обнаружения маркируемого объекта на узле, связанного с блоком управления лазерной маркировкой.
Целесообразно осуществление определения пространственного расположения маркируемого объекта с помощью камеры технического зрения, связанной с блоком управления лазерной маркировкой.
Предпочтительно осуществление определения пространственного расположения маркируемого объекта на основе полученного изображения путем определения ориентации и/или положения объекта в пространстве посредством сравнения шаблона маркируемого объекта с полученным распознанным изображением маркируемого объекта и определения угла поворота и/или координат маркируемого объекта на основе данных сравнения.
Маркируемый объект может быть неориентированным и расположение маркировки на маркированном объекте может быть не ориентировано.
Маркируемым объектом может быть ключ банки или кроненпробка бутылки.
Предпочтительно осуществление лазерной маркировки объектов с помощью модуля лазерной маркировки, связанного с блоком управления лазерной маркировкой.
Целесообразно осуществление определения скорости передвижения маркируемого объекта на узле лазерной маркировки с помощью датчика скорости, расположенного на узле лазерной маркировки, и связанного с модулем лазерной маркировки.
В одном из вариантов способа в процессе лазерной маркировки осуществляют обдув линзы лазера с помощью узла обдува линзы лазера, расположенного на каждом узле лазерной маркировки, и связанного с блоком управления лазерной маркировкой.
В одном из вариантов способа осуществляют стабилизацию маркируемых объектов, перемещаемых с помощью средства для размещения и передвижения объектов, на каждом узле лазерной маркировки с помощью узла стабилизации, расположенного на каждом узле лазерной маркировки.
Характеристикой средства для размещения и передвижения объектов может являться, по меньшей мере, скорость движения средства для размещения и передвижения объектов.
Также вышеуказанный технический результат обеспечивается за счет системы лазерной маркировки движущихся объектов, которая содержит следующее:
блок управления лазерной маркировкой;
два или более узлов лазерной маркировки для маркировки объектов, соединенных с блоком управления лазерной маркировкой и расположенных последовательно на участке лазерной маркировки средства для размещения и передвижения объектов;
модуль определения начального положения и скорости передвижения маркируемых объектов, расположенных последовательно и перемещаемых на средстве для размещения и передвижения объектов, соединенный с блоком управления лазерной маркировкой;
модуль счета перемещаемых маркируемых объектов, соединенный с блоком управления лазерной маркировкой, для распределения маркируемых объектов по узлам лазерной маркировки на основании данных счета и в зависимости от количества узлов лазерной маркировки;
при этом каждый узел лазерной маркировки включает, по меньшей мере, модуль обнаружения маркируемого объекта на узле, модуль определения пространственного расположения маркируемого объекта, модуль лазерной маркировки, соединенные с блоком управления лазерной маркировкой, модуль определения скорости движения маркируемого объекта на узле, соединенный с модулем лазерной маркировки.
При этом гибкость, масштабируемость и адаптируемость при одновременном повышении скорости и точности процесса лазерной маркировки достигаются за счет того, что система содержит два или более узлов лазерной маркировки, расположенных последовательно на соответствующих участках лазерной маркировки поточной линии, при этом каждый узел лазерной маркировки содержит датчик обнаружения и датчик определения скорости, также датчик определения скорости расположен на поточной линии, и, кроме этого, перед узлами лазерной маркировки расположен датчик счета для распределения объектов по узлам лазерной маркировки на основании данных счета и в зависимости от количества узлов лазерной маркировки.
В одном из вариантов системы каждый узел лазерной маркировки включает узел обдува линзы лазера, соединенный с блоком управления лазерной маркировкой.
В одном из вариантов системы каждый узел лазерной маркировки включает узел стабилизации маркируемых объектов.
В одном из вариантов системы модуль для определения начального положения и скорости передвижения маркируемых объектов включает датчик скорости, расположенный на средстве для размещения и передвижения объектов, и связанный с блоком управления лазерной маркировкой, причем датчик скорости представляет собой энкодер.
В одном из вариантов системы модуль счета включает датчик счета, расположенный перед узлами лазерной маркировки, и связанный с блоком управления лазерной маркировкой, причем датчик счета представляет собой щелевой оптический датчик.
В одном из вариантов системы модуль обнаружения маркируемого объекта на узле включает датчик обнаружения объекта на узле, представляющий собой щелевой оптический датчик, связанный с блоком управления лазерной маркировкой.
В одном из вариантов системы модуль определения скорости передвижения маркируемого объекта на узле лазерной маркировки включает датчик определения скорости, представляющий собой энкодер, связанный с модулем лазерной маркировки.
В одном из вариантов системы модуль определения пространственного расположения объекта включает камеру технического зрения, соединенную с блоком управления лазерной маркировкой, и кронштейн для крепления камеры технического зрения.
В одном из вариантов системы модуль лазерной маркировки включает кронштейн-стойку для крепления маркировочной головки с возможностью ее регулирования по высоте.
В одном из вариантов системы включает шкаф для размещения блока управления лазерной маркировкой и кронштейн-стойку для крепления шкафа.
В одном из вариантов системы количество узлов лазерной маркировки зависит от необходимой производительности лазерной маркировки и/или скорости движения средства для размещения и передвижения объектов.
Маркируемый объект может быть неориентированным и расположение маркировки на маркированном объекте может быть не ориентировано.
Маркируемым объектом может быть ключ банки или кроненпробка бутылки.
Краткое описание чертежей
Изобретение будет более понятным из описания, не имеющего ограничительного характера и приводимого со ссылками на прилагаемые чертежи, на которых изображено:
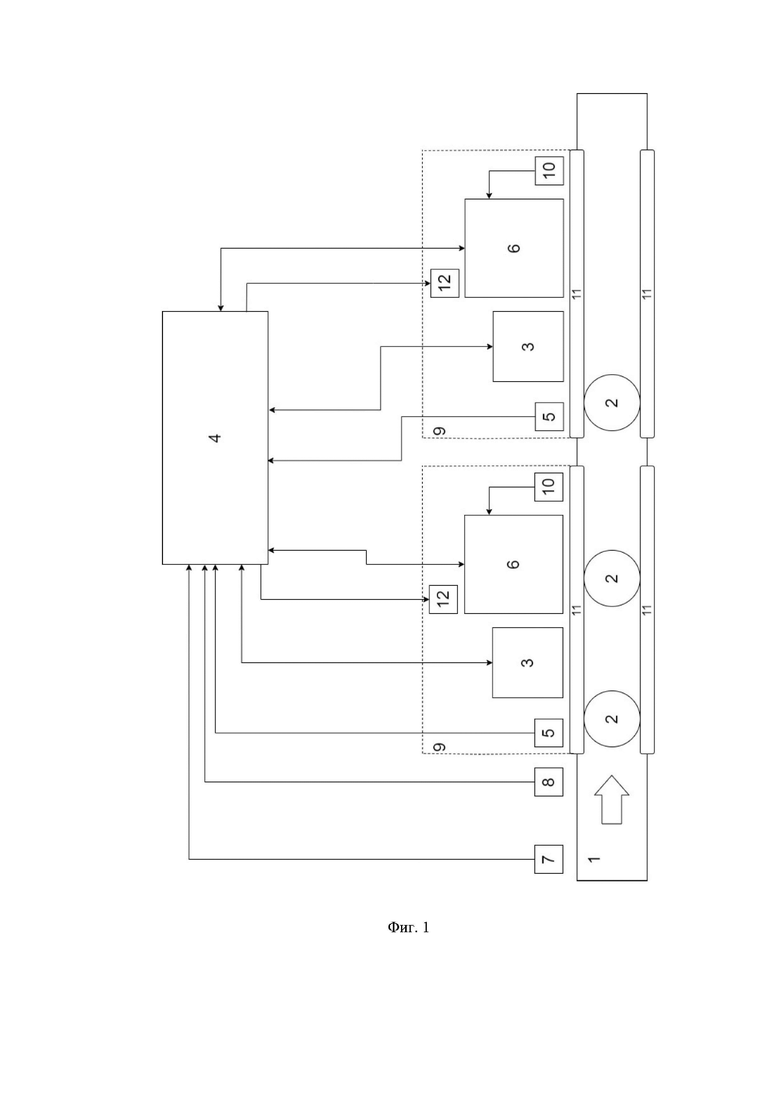
Фиг. 1 - иллюстрирует блок-схему лазерной маркировки движущихся объектов в случае тандема узлов лазерной маркировки.
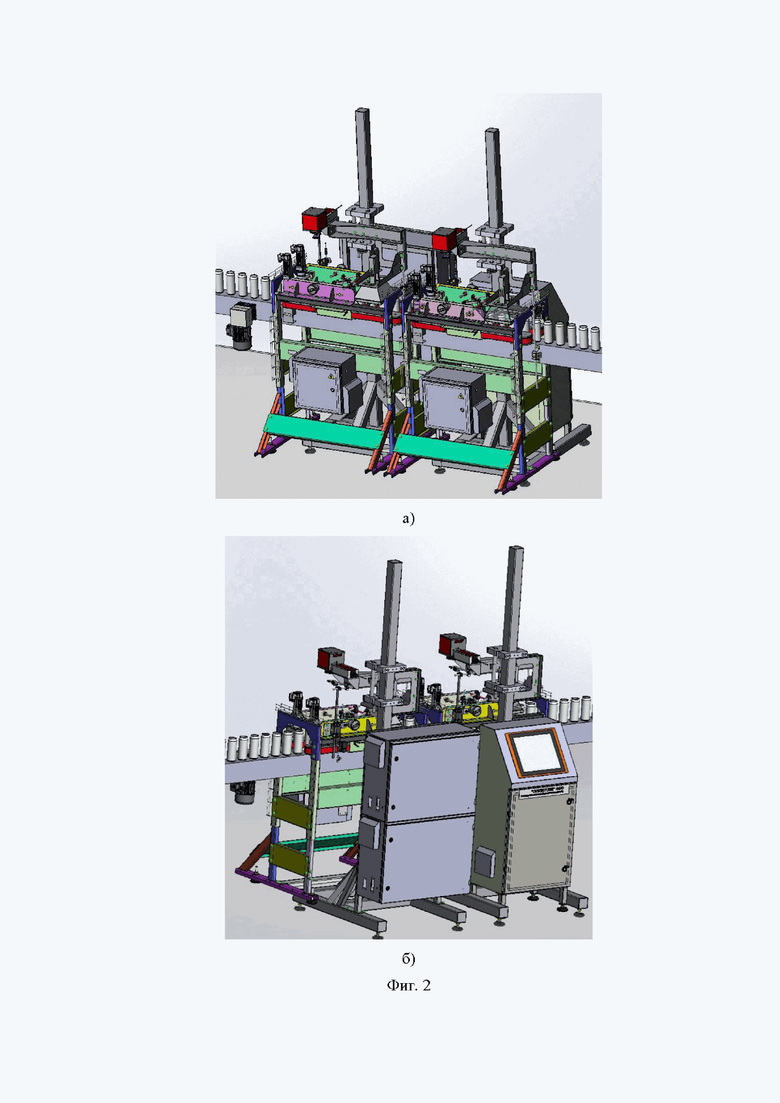
Фиг. 2 а), б) - иллюстрирует вариант системы лазерной маркировки движущихся неориентированных объектов, вид с двух сторон, в случае тандема узлов лазерной маркировки.
Осуществление изобретения
Способ лазерной маркировки движущихся объектов используется для поштучной лазерной маркировки продукции. Процесс лазерной маркировки продукции автоматизирован, сбор и обработка данных осуществляются автоматически. Лазерная маркировка продукции осуществляется следующим образом. Сначала выполняют начальное обнаружение маркируемых объектов, расположенных последовательно и перемещаемых с помощью средства для размещения и передвижения объектов, и осуществляют счет обнаруженных маркируемых объектов. Начальное обнаружение и счет маркируемых объектов выполняют с помощью датчика счета и блока управления лазерной маркировкой, которому датчик счета передает полученные данные для обработки. На основании полученных данных счета и в зависимости от количества узлов лазерной маркировки с помощью блока управления лазерной маркировкой распределяют маркируемые объекты по узлам лазерной маркировки, которые расположены последовательно на участке лазерной маркировки средства для размещения и передвижения объектов. Количество узлов лазерной маркировки выбирают в зависимости от необходимой производительности лазерной маркировки и/или скорости движения средства для размещения и передвижения объектов. Определяют начальное положение и скорость передвижения маркируемых объектов с помощью датчика счета, расположенного перед узлами лазерной маркировки, и датчика скорости, расположенного на средстве для размещения и перемещения объектов, и блока управления лазерной маркировкой, которому датчики передают данные для их дальнейшей обработки.
При этом на каждом узле лазерной маркировки для каждого маркируемого объекта, распределенного для соответствующего узла лазерной маркировки, на основе данных обнаружения маркируемого объекта на узле лазерной маркировки, данных распределения маркируемых объектов по узлам лазерной маркировки, начального положения и скорости передвижения маркируемого объекта осуществляют обнаружение маркируемого объекта на узле лазерной маркировки, на который указанный объект распределен, получают изображение и определяют пространственное расположение данного объекта на основе полученного изображения, выполняют лазерную маркировку объекта на основании полученных данных пространственного расположения объекта с учетом скорости передвижения объекта в процессе лазерной маркировки. Обнаружение объекта на узле происходит с помощью датчика обнаружения, расположенного на узле лазерной маркировки, который передает данные в блок управления лазерной маркировкой. Определение пространственного расположения объекта осуществляют с помощью камеры технического зрения и блока управления лазерной маркировкой путем определения ориентации и/или положения объекта в пространстве посредством сравнения шаблона маркируемого объекта с полученным распознанным изображением маркируемого объекта и определения угла поворота и/или координат маркируемого объекта на основе данных сравнения. Лазерную маркировку объектов выполняют с помощью модуля лазерной маркировки и блока управления лазерной маркировкой. Определение скорости передвижения маркируемого объекта на узле выполняют с помощью датчика скорости, размещенного на узле лазерной маркировки, который передает данные в модуль лазерной маркировки для учета скорости перемещения объекта в процессе его маркировки на основании полученных данных. Также в процессе лазерной маркировки осуществляют обдув линзы лазера с помощью узла обдува линзы лазера, расположенного на каждом узле лазерной маркировки, под управлением блока управления лазерной маркировкой. При этом, на каждом узле лазерной маркировки расположен узел стабилизации маркируемых объектов. Стабилизация объектов осуществляется на всем протяжении каждого узла лазерной маркировки.
Система лазерной маркировки движущихся объектов содержит:
- блок управления лазерной маркировкой;
- два или более узлов лазерной маркировки для маркировки объектов, соединенных с блоком управления лазерной маркировкой и расположенных последовательно на участке лазерной маркировки средства для размещения и передвижения объектов;
- модуль определения начального положения и скорости передвижения маркируемых объектов, расположенных последовательно и перемещаемых на средстве для размещения и передвижения объектов, соединенный с блоком управления лазерной маркировкой;
- модуль счета перемещаемых маркируемых объектов, соединенный с блоком управления лазерной маркировкой, для распределения маркируемых объектов по узлам лазерной маркировки на основе данных счета и в зависимости от количества узлов лазерной маркировки;
при этом каждый узел лазерной маркировки включает, по меньшей мере, следующее:
- модуль обнаружения маркируемого объекта на узле, соединенный с блоком управления лазерной маркировкой;
- модуль определения пространственного расположения маркируемого объекта, соединенный с блоком управления лазерной маркировкой;
- модуль лазерной маркировки, соединенный с блоком управления лазерной маркировкой;
- модуль определения скорости движения маркируемого объекта на узле, соединенный с модулем лазерной маркировки.
Каждый узел лазерной маркировки включает также:
- узел обдува линзы лазера, соединенный с блоком управления лазерной маркировкой;
- узел стабилизации маркируемых объектов.
Модуль счета включает датчик счета (например, щелевой оптический датчик или оптоволоконный датчик), связанный с блоком управления лазерной маркировкой. Датчик счета передает полученные данные в блок управления для дальнейшей обработки. На основании полученных данных от датчика счета осуществляют начальное обнаружение, счет маркируемых объектов, распределение обнаруженных объектов по узлам лазерной маркировки.
Модуль для определения начального положения и скорости передвижения маркируемых объектов включает датчик скорости (например, энкодер), расположенный на средстве для размещения и передвижения объектов, и связанный с блоком управления лазерной маркировкой. Датчик скорости передает полученные данные в блок управления для дальнейшей обработки. На основании полученных данных определяют начальное положение, скорость передвижения маркируемых объектов, что позволяет определить, когда именно обнаруженный объект достигнет определенное положение на участке лазерной маркировки, на который он распределен.
Модуль обнаружения маркируемого объекта на узле включает датчик обнаружения объекта на узле (например, щелевой оптический датчик или оптоволоконный датчик), связанный с блоком управления лазерной маркировкой. Датчик обнаружения объекта на узле передает полученные данные в блок управления для дальнейшей обработки. На основании полученных данных обнаруживают маркируемый объекта на узле лазерной маркировки, на который он распределен.
Модуль определения скорости передвижения маркируемого объекта на узле лазерной маркировки включает датчик определения скорости (например, энкодер), связанный с блоком управления лазерной маркировкой. Датчик скорости передает полученные данные в модуль лазерной маркировки для дальнейшей обработки. На основании полученных данных в процессе маркировки учитывается скорость передвижения маркируемого объекта на узле.
Модуль определения пространственного расположения объекта включает камеру технического зрения, соединенную с блоком управления лазерной маркировкой. Камера расположена на кронштейне для крепления камеры технического зрения. Определение пространственного расположения объекта осуществляют с помощью камеры технического зрения и блока управления лазерной маркировкой путем определения ориентации и/или положения объекта в пространстве посредством сравнения шаблона маркируемого объекта с полученным распознанным изображением маркируемого объекта и определения угла поворота и/или координат маркируемого объекта на основе данных сравнения.
Количество узлов лазерной маркировки зависит от необходимой производительности лазерной маркировки и/или характеристик средства для размещения и передвижения объектов (например, скорости движения средства для размещения и передвижения объектов).
На Фиг. 1 представлен пример блок-схемы лазерной маркировки движущихся объектов, расположенных на средстве для размещения и передвижения объектов (например, конвейере), в случае использования тандема узлов лазерной маркировки. На Фиг. 2 представлен примерный вид с двух сторон системы лазерной маркировки движущихся неориентированных объектов для тандема узлов лазерной маркировки.
На Фиг. 1 позицией 1 обозначено средство для размещения и передвижения маркируемых объектов (конвейер), позицией 2 - маркируемый объект (продукт), позицией 3 - комплект технического зрения (камера технического зрения), позицией 4 - блок управления лазерной маркировкой, позицией 5 - датчик обнаружения маркируемого объекта на узле, позицией 6 - модуль лазерной маркировки, позицией 7 - датчик определения скорости перемещения маркируемого объекта на конвейере (энкодер), позицией 8 - датчик обнаружения и счета маркируемых объектов, позицией 9 - шкафы тандема узлов лазерной маркировки для размещения блока питания и блока управления, позицией 10 датчик для определения скорости движения маркируемых объектов (стабилизированных маркируемых объектов) на узле лазерной маркировки (энкодер), позицией 11 - узел стабилизации продукта (стабилизатор), позицией 12 - узел обдува линзы лазера.
Система лазерной маркировки движущихся объектов работает следующим образом.
Система лазерной маркировки интегрируется в производственную линию, непосредственно на конвейер 1. Маркируемые объекты 2 размещаются на конвейере 1 для размещения и передвижения. Маркируемые объекты 2 могут быть неориентированными. С помощью конвейера 1 маркируемые объекты непрерывно перемещаются к зоне непосредственного воздействия лазерным излучением. Датчик счета 8 расположен перед первым узлом лазерной маркировки на узле стабилизации продукции 11, перед датчиком обнаружения 5 маркируемого объекта, расположенным на первом узле лазерной маркировки. Датчик 8 служит для определения наличия или отсутствия продукта на конвейере. Предпочтительно датчик 8 представляет собой щелевой оптический датчик ввиду его точности и быстродействия. Также может использоваться оптоволоконный. Датчик 8, расположенный перед узлами лазерной маркировки, фиксирует наличие маркируемого объекта 2 и подает соответствующий сигнал в блок управления 4, например программируемый логический контроллер (ПЛК), который в свою очередь определяет на каком из узлов лазерной маркировки 9 будет производиться маркировка данного объекта 2 в зависимости от количества подключенных узлов лазерной маркировки 9 и порядкового номера объекта 2, и распределяет объект 2 для соответствующего узла лазерной маркировки 9. Распределение по узлам происходит посредством счета количества срабатываний датчика счета 8. Например, если подключено два узла маркировки, то счет ведется на один, два, и объекты, обнаруженные на каждое первое срабатывание датчика, распределяются для первого узла лазерной маркировки, а объекты, обнаруженные на каждое второе срабатывание, для второго узла лазерной маркировки, либо счет может вестись последовательно, и четные объекты распределяются на первый узел, а нечетные - на второй узел лазерной маркировки. Например, в случае использования трех узлов лазерной маркировки счет может вестись на один, два, три, и как и для первого варианта счета для двух узлов, в этому случае соответственно первый объект распределяется для первого узла, второй - для второго, третий - для третьего. Таким образом, при входе объекта 2 в систему маркировки ПЛК получает дискретный сигнал с датчика счета 8, определяя очередность продукта на линии. На каждом узле лазерной маркировки 9 объект 2 фиксируется в узле стабилизации 11.
Начальное положение и скорость передвижения объекта 2, то есть через какой промежуток времени объект дойдет до необходимого положения на узле лазерной маркировки, на который он распределен, определяются следующим образом. В момент срабатывания датчика счета 8 по энкодеру 7 записывается положение объекта 2 (по энкодеру 7), когда данный объект 2 достигнет заданное положение на узле лазерной маркировки 9, на который он распределен. Энкодер 7 может устанавливаться в любом месте на конвейере 1. Вычисление осуществляется из начальной позиции энкодера, которая записывается в момент срабатывания датчика счета 8, когда объект 2 находится в начальном положении. Данные для вычисления автоматически определяются посредством первичной калибровки системы лазерной маркировки. При обнаружении сигнала с датчика обнаружения 5 объекта 2 на узле 9 через вышеопределенный промежуток времени (через заданную задержку по энкодеру) происходит формирование управляющего сигнала на включение камеры технического зрения 3. Таким образом, в зависимости от очередности продукта на конвейере происходит выдача дискретного сигнала с контроллера на камеру технического зрения. Затем с помощью камеры технического зрения 3 и блока управления 4 определяют положение и ориентацию объекта 2 в пространстве. По сигналу контроллера происходит съемка стабилизированного объекта с помощью камеры технического зрения 3, далее происходит распознавание изображения, и определяют пространственное расположение объекта 2 путем определения ориентации и/или положения объекта в пространстве посредством сравнения шаблона маркируемого объекта с полученным распознанным изображением маркируемого объекта и определения угла поворота и/или координат маркируемого объекта на основе данных сравнения. Например, по модели ключа определяют угол поворота ключа и его координаты (для стеклянных бутылок производится распознавание по модели кроненпробки и определяются ее координаты). Угол и координаты передаются в контроллер, например в виде цифровых данных, посредством TCP соединения. В зависимости от поступления данных в контроллер о распознавании ключа / кроненпробки, происходит передача по TCP соединению данных о расположении продукта, его угле поворота и выдача дискретного сигнала модулю лазерной маркировки 6 на начало маркировки лазером. Далее производят маркировку, например, информационного или верификационного двумерного штрихового кода или «человекочитаемой» информации, например, текстовой, лазерным лучом по заданным координатам с учетом пространственного расположения и скорости перемещения объекта 2. Скорость перемещения объекта 2 контролируется с помощью энкодера 10, расположенного на узле лазерной маркировки, который передает полученные данные в модуль лазерной маркировки 6. По завершении маркировки получают дискретный сигнал от модуля лазерной маркировки 6 о завершении маркировки. В случае, если маркируемые объекты не ориентированы, расположение лазерной маркировки не ориентировано в зависимости от центра ключа или кроненпробки, и лазерная маркировка может располагаться любым образом на маркированном объекте. С помощью энкодера 10 также осуществляют контроль вращения конвейера 1 на узле лазерной маркировки 9. На следующем или следующих по ходу движения конвейера 1 узле или узлах лазерной маркировки 9 нанесение маркировки на уже промаркированный объект 2 не производится.
Определение и передача данных об угле поворота ключа и его координатах происходит следующим образом. Используется стандартный инструмент Pattern Find из коллекции инструментов в программном обеспечении видеопроцессора. Для работы инструмента необходимо создать шаблон, с которым будет сравниваться полученное изображение. Данный инструмент возвращает сведения о том, найден ли заданный шаблон на изображении, а также координату заданной точки шаблона и угол поворота относительно этой точки. В программное обеспечение комплекта лазерной маркировки пересылаются данные кодов, которые необходимо нанести, координаты каждого найденного техническим зрением шаблона на изображении, а также углы поворота шаблонов. Нанесение с заданными координатами, углом поворота и данными кода реализовано в программном обеспечении комплекта лазерной маркировки. Реализация передачи данных - пакетная, посредством TCP соединения, также возможна реализация передачи данных посредством «Именованного канала» (Pipe).
Дополнительно проверяют наличие брака на поверхности нанесения маркировки, Например, при маркировке на ключе банки система проверяет наличие ключа или брака ключа. В случае обнаружения несоответствия заданному шаблону нанесения кода маркировки не будет и продукт будет удален с производственной линии.
Количество узлов лазерной маркировки выбирают в зависимости от необходимой производительности лазерной маркировки и/или скорости движения средства для размещения и передвижения объектов.
Комплект технического зрения включает в себя стойку, держатель, механизм регулировки, камеру технического зрения, кронштейн для крепления камеры технического зрения (кронштейн крепится к узлу стабилизации продукции), объектив, датчик вилочный, подсветку (например, светодиодная лента), видеопроцессор (например, один на два комплекта), кронштейн крепления маркировочной головы узла лазерной маркировки. На стойки комплектов технического зрения в зависимости от исполнения закрепляются шкафы для размещения в них блоков питания и управления системы лазерной маркировки.
Модуль лазерного нанесения включает в себя комплект лазерного маркиратора, который встраивается в существующую производственную линию и предназначен для нанесения лазерных маркировок, например, нанесения Data Matrix кодов методом лазерной обработки поверхности металлической кронен-крышки стеклянной бутылки или ключа банки, которые перемещаются конвейером.
Комплект лазерного маркиратора может включать блок питания и управления, маркировочную головку с объективом, USB-флеш-накопитель с дистрибутивом программного обеспечения (ПО), USB ключ электронной защиты ПО (основной), USB ключ электронной защиты ПО (дизайнерский), визуализатор лазерного излучения (используется для диагностики неисправностей). Маркировочная головка крепится к кронштейн-стойке с возможностью ее регулирования по высоте. Комплект лазерного маркиратора комплектуется шкафом для защиты излучателя комплекта лазерного маркиратора от внешних воздействий, а также узлом обдува линзы лазера, предназначенным для удаления испарений, образующихся в зоне работы лазерных маркировочных головок.
Узел обдува монтируется на конвейерную линию или на раму стабилизатора, предназначен для удаления испарений с торцевой поверхности линзы, образующихся в зоне работы лазерных маркировочных головок направленной струей чистого сухого воздуха. Узел оснащен пневматической форсункой, распределителем, монтажным набором. Для обеспечения функционирования узла необходимо обеспечить подведение очищенного сжатого воздуха. В состав узла обдува линзы входит клапан, форсунка, кронштейн с регулировочной стойкой.
Узел стабилизации продукта осуществляет стабилизацию положения продукта на конвейере и предназначен для встраивания в существующий на производственной площадке конвейер. Он обеспечивает стабилизацию, предотвращает вращение перемещаемых на производственной линии бутылок или банок на участке нанесения лазерной маркировки. Узел стабилизации продукта представляет собой раму, на которой расположены два ленточных стабилизатора. Положение стабилизаторов может быть отрегулировано по формату продукта на конвейерной линии. Скорость движения лент синхронизируется со скоростью конвейерной линии посредством сервоприводов, размещаемых в шкафу управления. В состав узла стабилизации продукта может входить: корпус, выполненный, из нержавеющей стали, редуктор, сервопривод, серводвигатель, термостат, вентилятор, выключатель автоматический.
Настоящее изобретение обеспечивает гибкость и масштабируемость процесса лазерной маркировки продукции и его адаптируемость к существующим производственным линиям одновременно с повышением скорости и точности процесса лазерной маркировки, а также позволяет обеспечить необходимую производительность процесса лазерной маркировки.
Изобретение было раскрыто выше со ссылкой на конкретный вариант его осуществления. Очевидны и иные варианты осуществления изобретения, не меняющие его сущности, как оно раскрыто в настоящем описании.
Изобретение относится к области лазерной маркировки продукции. Техническим результатом является обеспечение гибкости и масштабируемости процесса лазерной маркировки продукции и его адаптируемости к существующим производственным линиям одновременно с повышением скорости и точности процесса лазерной маркировки. Способ лазерной маркировки движущихся объектов включает следующие этапы: начальное обнаружение маркируемых объектов, расположенных последовательно и перемещаемых на средстве для размещения и передвижения объектов; осуществление счета объектов; на основании данных счета и в зависимости от количества узлов лазерной маркировки распределение объектов по узлам лазерной маркировки, причем количество узлов лазерной маркировки выбирают в зависимости от характеристик средства для размещения и передвижения объектов и/или заданной производительности лазерной маркировки; при этом на каждом узле лазерной маркировки для каждого объекта, распределенного для соответствующего узла лазерной маркировки, на основе данных обнаружения объекта на узле, данных распределения объектов по узлам, начального положения и скорости передвижения объекта, данных пространственного расположения объекта с учетом скорости передвижения объекта на узле осуществление лазерной маркировки объекта, распределенного для узла лазерной маркировки, перемещаемого на средстве для размещения и передвижения объектов. 2 н. и 25 з.п. 2 ил.
1. Способ лазерной маркировки движущихся объектов, включающий следующие этапы:
- начальное обнаружение маркируемых объектов, расположенных последовательно и перемещаемых на средстве для размещения и передвижения объектов;
- осуществление счета обнаруженных маркируемых объектов;
- на основании полученных данных счета и в зависимости от количества узлов лазерной маркировки осуществление распределения маркируемых объектов по узлам лазерной маркировки, расположенным последовательно на участке лазерной маркировки средства для размещения и передвижения объектов, причем количество узлов лазерной маркировки выбирают в зависимости от характеристик средства для размещения и передвижения объектов и/или заданной производительности лазерной маркировки;
- определение начального положения и скорости передвижения маркируемых объектов;
при этом на каждом узле лазерной маркировки для каждого маркируемого объекта, распределенного для соответствующего узла лазерной маркировки, на основе данных обнаружения маркируемого объекта на узле лазерной маркировки, данных распределения маркируемых объектов по узлам лазерной маркировки, начального положения и скорости передвижения маркируемого объекта осуществляют:
- обнаружение маркируемого объекта на узле лазерной маркировки, на который указанный объект распределен;
- получение изображения указанного маркируемого объекта;
- определение пространственного расположения указанного маркируемого объекта на основе полученного изображения;
- определение скорости передвижения указанного маркируемого объекта на узле лазерной маркировки;
- на основе полученных данных пространственного расположения указанного маркируемого объекта с учетом скорости передвижения объекта осуществление лазерной маркировки указанного маркируемого объекта, распределенного для узла лазерной маркировки, перемещаемого на средстве для размещения и передвижения объектов.
2. Способ по п. 1, отличающийся тем, что распределение маркируемых объектов по узлам лазерной маркировки осуществляют с помощью блока управления лазерной маркировкой.
3. Способ по п. 1, отличающийся тем, что начальное обнаружение маркируемых объектов и осуществление счета маркируемых объектов осуществляют с помощью датчика счета, расположенного перед узлами лазерной маркировки и связанного с блоком управления лазерной маркировкой.
4. Способ по п. 1, отличающийся тем, что определение начального положения и скорости передвижения маркируемых объектов осуществляют с помощью датчика скорости, расположенного на средстве для размещения и перемещения объектов и связанного с блоком управления лазерной маркировкой.
5. Способ по п. 1, отличающийся тем, что обнаружение маркируемого объекта на участке лазерной маркировки осуществляют с помощью датчика обнаружения маркируемого объекта на узле, связанного с блоком управления лазерной маркировкой.
6. Способ по п. 1, отличающийся тем, что определение пространственного расположения маркируемого объекта осуществляют с помощью камеры технического зрения, связанной с блоком управления лазерной маркировкой.
7. Способ по п. 1, отличающийся тем, что определение пространственного расположения маркируемого объекта на основе полученного изображения включает по меньшей мере определение ориентации и/или положения объекта в пространстве путем сравнения шаблона маркируемого объекта с полученным распознанным изображением маркируемого объекта и определения угла поворота и/или координат маркируемого объекта на основе данных сравнения.
8. Способ по п. 1, отличающийся тем, что маркируемый объект может быть неориентированным и расположение лазерной маркировки на маркированном объекте может быть не ориентировано.
9. Способ по п. 1, отличающийся тем, что маркируемым объектом является ключ банки или кроненпробка бутылки.
10. Способ по п. 1, отличающийся тем, что лазерную маркировку объектов осуществляют с помощью модуля лазерной маркировки, связанного с блоком управления лазерной маркировкой.
11. Способ по п. 1, отличающийся тем, что определение скорости передвижения маркируемого объекта на узле лазерной маркировки осуществляют с помощью датчика скорости, расположенного на узле лазерной маркировки и связанного с модулем лазерной маркировки.
12. Способ по п. 1, отличающийся тем, что в процессе лазерной маркировки осуществляют обдув линзы лазера с помощью узла обдува линзы лазера, расположенного на каждом узле лазерной маркировки и связанного с блоком управления лазерной маркировкой.
13. Способ по п. 1, отличающийся тем, что включает этап стабилизации маркируемых объектов, перемещаемых с помощью средства для размещения и передвижения объектов, на каждом узле лазерной маркировки с помощью узла стабилизации, расположенного на каждом узле лазерной маркировки.
14. Способ по п. 1, отличающийся тем, что характеристикой средства для размещения и передвижения объектов является по меньшей мере скорость движения средства для размещения и передвижения объектов.
15. Система лазерной маркировки движущихся объектов, содержащая по меньшей мере следующее:
блок управления лазерной маркировкой;
два или более узлов лазерной маркировки для маркировки объектов, соединенных с блоком управления лазерной маркировкой и расположенных последовательно на участке лазерной маркировки средства для размещения и передвижения объектов;
модуль определения начального положения и скорости передвижения маркируемых объектов, расположенных последовательно и перемещаемых на средстве для размещения и передвижения объектов, соединенный с блоком управления лазерной маркировкой;
модуль счета перемещаемых маркируемых объектов, соединенный с блоком управления лазерной маркировкой, для распределения маркируемых объектов по узлам лазерной маркировки на основе данных счета и в зависимости от количества узлов лазерной маркировки;
при этом каждый узел лазерной маркировки включает модуль обнаружения маркируемого объекта на узле, модуль определения пространственного расположения маркируемого объекта, модуль лазерной маркировки, соединенные с блоком управления лазерной маркировкой, модуль определения скорости движения маркируемого объекта на узле, соединенный с модулем лазерной маркировки.
16. Система по п. 15, отличающаяся тем, что каждый узел лазерной маркировки включает узел обдува линзы лазера, соединенный с блоком управления лазерной маркировкой.
17. Система по п. 15, отличающаяся тем, что каждый узел лазерной маркировки включает узел стабилизации маркируемых объектов.
18. Система по п. 15, отличающаяся тем, что модуль для определения начального положения и скорости передвижения маркируемых объектов включает датчик скорости, расположенный на средстве для размещения и передвижения объектов и связанный с блоком управления лазерной маркировкой, причем датчик скорости представляет собой энкодер.
19. Система по п. 15, отличающаяся тем, что модуль счета включает датчик счета, расположенный перед узлами лазерной маркировки и связанный с блоком управления лазерной маркировкой, причем датчик счета представляет собой щелевой оптический датчик.
20. Система по п. 15, отличающаяся тем, что модуль обнаружения маркируемого объекта на узле включает датчик обнаружения объекта на узле, представляющий собой щелевой оптический датчик, связанный с блоком управления лазерной маркировкой.
21. Система по п. 15, отличающаяся тем, что модуль определения скорости передвижения маркируемого объекта на узле лазерной маркировки включает датчик определения скорости, представляющий собой энкодер, связанный с модулем лазерной маркировки.
22. Система по п. 15, отличающаяся тем, что модуль определения пространственного расположения объекта включает камеру технического зрения, соединенную с блоком управления лазерной маркировкой, и кронштейн для крепления камеры технического зрения.
23. Система по п. 15, отличающаяся тем, что модуль лазерной маркировки включает кронштейн-стойку для крепления маркировочной головки с возможностью ее регулирования по высоте.
24. Система по п. 15, отличающаяся тем, что включает шкаф для размещения блока управления лазерной маркировкой и кронштейн-стойку для крепления шкафа.
25. Система по п. 15, отличающаяся тем, что количество узлов лазерной маркировки зависит от необходимой производительности лазерной маркировки и/или скорости движения средства для размещения и передвижения объектов.
26. Система по п. 15, отличающаяся тем, что маркируемый объект может быть неориентированным и расположение лазерной маркировки на маркированном объекте может быть не ориентировано.
27. Система по п. 15, отличающаяся тем, что маркируемым объектом является ключ банки или кроненпробка бутылки.
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ИНТЕГРАТОР ПОСТОЯННОГО ТОКА | 0 |
|
SU217736A1 |
| Газовая печь непрерывного действия с наклонным или горизонтальным подом для обработки железной руды и других материалов | 1948 |
|
SU127669A1 |
| US 6180914 B2, 30.01.2001 | |||
| CN 205905562 U, 25.01.2017 | |||
| Газовая печь непрерывного действия с наклонным или горизонтальным подом для обработки железной руды и других материалов | 1948 |
|
SU127669A1 |

