ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к способу и системе для контроля состояния летательного аппарата. В частности, изобретение относится к способу и системе для предупреждения основе контролируемой связи, прием которой ожидается от летательного аппарата.
УРОВЕНЬ ТЕХНИКИ
Современные системы контроля летательного аппарата обычно используют данные адресно-отчетной системы авиационной связи (ACARS) совместно с радиолокационными данными, чтобы отслеживать продвижение летательного аппарата. Эти данные могут использоваться авиационными диспетчерами или, в качестве альтернативы, предоставляться авиаоператорам в виде услуги.
В системе ACARS каждый летательный аппарат оснащается приемопередатчиком УКВ для обеспечения канала передачи данных между бортовым оборудованием летательного аппарата и наземным оборудованием. Этот канал передачи данных может обеспечиваться посредством прямой передачи от летательного аппарата наземной станции, либо летательный аппарат, в качестве альтернативы, может передавать данные спутнику, который затем перенаправляет данные наземной станции спутниковой связи. Эти передачи принимаются на наземных станциях поставщиком услуг канала передачи данных, который затем направляет данные авиационным диспетчерам или авиаоператорам.
Периодичность, с которой заданный летательный аппарат будет порождать передачи данных ACARS, сконфигурирован авиаперевозчиком и обычно составляет примерно от десяти до двадцати минут. Как правило, это определяется для того, чтобы обеспечить равновесие между приемом новейших данных и затратами на каждое сообщение, связанными с передачей данных. Эта периодичность устанавливается путем подходящего программирования бортовой авиационной электроники во время технического обслуживания летательного аппарата и не может быть изменена во время полета.
В связи с этим довольно длительным периодом между последовательными передачами сообщений ACARS летательный аппарат может пройти значительные расстояния между передачами, что в свою очередь может привести к неопределенности в предполагаемом положении и маршруте летательного аппарата. Кроме того, отметка времени для любой заданной передачи ACARS является точной только в пределах минуты, и данные о положении сообщаются с точностью до трех десятичных разрядов.
Если летательному аппарату приходится кружить в заданной области воздушного пространства, например, в зоне ожидания аэропорта, то это не станет очевидно сразу из данных ACARS, так как летательный аппарат, скорее всего, выполнит полный круг ко времени осуществления последующей передачи ACARS. Это может привести к ненадежности контроля данных ACARS в отношении того, ошибочны ли эти передачи данных, или действительно ли летательный аппарат оставался в заданной области воздушного пространства между последующими передачами ACARS.
Увеличение стандартной частоты (то есть сокращение периода между последовательными передачами) обмена сообщениями ACARS, которая запрограммирована в авиационной электронике летательного аппарата, во время технического обслуживания обеспечило бы более актуальный набор данных о положении. Однако если бы каждая авиакомпания поступала так в качестве стандарта повсеместно, то создалась бы большая нагрузка на сеть ACARS, поскольку это взаимно однозначная цифровая система передачи данных. Это может перегрузить сеть и уменьшить надежность и точность.
Воздушное пространство во всем мире разбито на некоторое количество трехмерных (3D) блоков пространства, известных как секторы. В каждом секторе есть один или несколько авиационных диспетчеров, которые осуществляют связь и отвечают за безопасность летательного аппарата, движущегося или собирающегося войти в тот сектор воздушного пространства. Эти диспетчеры работают на поставщиков аэронавигационных услуг (ANSP) и обучены контролировать летательный аппарат так, что происходит безопасное и аккуратное движение летательного аппарата от точки к точке наиболее эффективным способом.
Чтобы добиться этого, авиационные диспетчеры осуществляют связь с летательным аппаратом, чтобы оказывать активную поддержку и выдавать разрешения, а также принимать информацию от летательного аппарата. Обычно эта связь осуществляется по радиотелефону, например посредством радиопередач в УКВ или КВ диапазонах. Одной из проблем с радиотелефоном является то, что можно выполнять только одну передачу на заданной частоте в заданное время, и поэтому даже при сильном радиосигнале передачи могут прекращаться или становиться неразборчивыми. Чтобы убедиться, что передачи принимаются точно, необходимо повторять связь, что также увеличивает время, необходимое для завершения данной связи.
Кроме того, речевая связь может страдать от неправильного понимания или языковых барьеров, качество речи может быть низким, и УКВ-частоты речевого диапазона испытывают высокую перегрузку. Для борьбы с этими отрицательными аспектами была организована комиссия для создания новой системы, будущей аэронавигационной системы (FANS), чтобы улучшить эту связь, например, путем использования системы передачи данных для инкапсуляции сообщений между ANSP и летательным аппаратом.
Определено некоторое количество связи стандартного формата, которая может использоваться для отправки общих команд, таких как распределения эшелона или высоты, ограничения пересечений, боковые отклонения, изменения и разрешения по маршруту, задания скорости, присвоения радиочастот и различные запросы другой информации, с возможностью неструктурированного текстового сообщения для связи, которое не входит в стандартный список общих команд или ответов.
Эта связь обычно известна как связь "диспетчер - пилот" по линии передачи данных (CPDLC), и она устраняет необходимость подтверждать связь несколькими передачами и повторениями, так как обе стороны могут видеть связь в текстовом виде, и связь доступна по требованию, так что ее можно легко проанализировать позднее или напечатать.
Эти сообщения в канале передачи данных обычно инкапсулируются и передаются с использованием протокола адресно-отчетной системы авиационной связи (ACARS). Использующий ACARS летательный аппарат можно оснастить УКВ и/или КВ транспондером для предоставления канала передачи данных между бортовым оборудованием летательного аппарата и оборудованием наземной станции. Этот канал передачи данных может предоставляться посредством прямой передачи с самолета на землю или, в качестве альтернативы, посредством микроволновой передачи через спутник. Эти передачи принимаются на земле поставщиком услуг канала передачи данных, а затем направляются авиаоператорам этим же поставщиком услуг канала передачи данных для взимания платы за каждое сообщение. Сообщения, переданные от летательного аппарата наземной системе, могут называться сообщениями нисходящей линии связи, а сообщения, переданные от наземной системы на летательный аппарат, могут называться сообщениями восходящей линии связи.
Другим аспектом FANS является возможность настроить контрактное автоматическое зависимое наблюдение (ADS-C). ADS-C использует авиационные электронные системы FANS, которые являются частью бортовых систем управления полетом (FMS) в оборудованном FANS летательном аппарате, чтобы автоматически предоставлять информацию, например положение, высоту, скорость, цель летательного аппарата и метеорологические данные пользователям, например ANSP или авиакомпаниям. Сообщение ADS-C будет содержать, как минимум, информацию о трехмерном положении, отметку времени, соответствующую информации о положении, и добротность (FOM), которая указывает точность данных о положении.
Контракт задается наземной системой конечного пользователя и может указывать, что связь должна отправляться с летательного аппарата наземным системам конечного пользователя в ответ на заданные периодические, или основанные на требованиях, или основанные на событиях критерии либо сочетание этих критериев. Контракты ADS с данным летательным аппаратом способны поддерживать вплоть до пяти отдельных наземных систем, и в настоящее время эти соединения ADS-C обычно используются авиационными диспетчерами в ANSP, у которых есть наземные системы с поддержкой FANS, чтобы уменьшить зависимость от диалогов по речевому каналу между пилотом летательного аппарата и авиационным диспетчером, что в свою очередь уменьшает рабочую нагрузку на диспетчера и пилота и позволяет уменьшить интервал между соответствующим летательным аппаратом.
ANSP может определить возможности канала передачи данных данного летательного аппарата путем обмена с летательным аппаратом сообщениями уведомления средств обслуживания воздушного движения (AFN). Эти сообщения также могут включать в себя адресную информацию, которая позволяет происходить последующему сеансу FANS.
В прошлом авиакомпании полагались на отчеты, выданные авиационными диспетчерами, и использовали только пассивные средства для контроля состояния летательного аппарата. Заявитель понял, что нужна проактивная система, которую можно быстро разработать и реализовать с использованием существующего оборудования летательного аппарата, чтобы авиакомпании контролировали состояние своего летательного аппарата.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В соответствии с первым аспектом изобретения предоставляется компьютеризированный способ для контроля состояния летательного аппарата. Компьютеризированный способ содержит отправку из модуля вывода в системе контроля летательного аппарата запроса контракта на передачу отчетов в авиационную электронику летательного аппарата, при этом запрос контракта на передачу отчетов задает один или несколько критериев отчетов, по которым авиационной электронике летательного аппарата необходимо предоставлять системе контроля летательного аппарата ответный сигнал данных; прием в модуле ввода в системе контроля летательного аппарата ответных сигналов данных, отправленных из авиационной электроники летательного аппарата в систему контроля летательного аппарата; определение в процессоре системы контроля летательного аппарата, удовлетворяют ли принятые ответы одному или нескольким критериям предупреждения; и формирование предупреждения в модуле предупреждения в системе контроля летательного аппарата на основе упомянутого определения.
Этот вариант осуществления преимущественно предоставляет способ, при помощи которого можно инициировать с летательным аппаратом контракт на передачу отчетов, например контракт ADS, и на основе сообщений по контракту на передачу отчетов может предоставляться интеллектуальное предупреждение.
Критерии отчетов предпочтительно могут задавать первый интервал, в котором авиационной электронике летательного аппарата необходимо предоставлять ответный сигнал данных, критерии предупреждения могут задавать второй интервал, и в модуле предупреждения в системе контроля летательного аппарата может формироваться предупреждение при отсутствии необходимого ответного сигнала данных, принимаемого в течение первого или второго интервала. Это преимущественно предоставляет способ, который может автоматически предупреждать пользователя, что не принято предполагаемое периодическое ответное сообщение по контракту на передачу отчетов. Тогда пользователь может исследовать ситуации и определить, нужно ли дальнейшее действие.
Не обязательно, критерии отчетов могут указывать, что необходим неотложный ответный сигнал данных от авиационной электроники летательного аппарата, и в модуле предупреждения в системе контроля летательного аппарата может формироваться предупреждение при отсутствии ответного сигнала данных, принимаемого в интервале, заданном критериями предупреждения. Кроме того, из базы данных критериев можно принять один или несколько критериев отчетов либо один или несколько критериев предупреждения, и ответные сигналы данных могут содержать информацию о местоположении летательного аппарата, соответствующую летательному аппарату.
В одном варианте осуществления модуль ввода сконфигурирован для приема данных плана полета и данных ACARS, соответствующих летательному аппарату, и в модуле предупреждения формируется предупреждение, если определяется, что принято сообщение изменения фазы полета, соответствующее летательному аппарату, но не приняты данные плана полета, соответствующие летательному аппарату. Это обеспечивает предупреждение, если летательный аппарат собирается взлетать или взлетел, но системой не принят план полета, соответствующий полету упомянутого летательного аппарата. Это желательно, поскольку отсутствие данных плана полета для летательного аппарата будет означать, что некоторые другие функции предупреждения могут быть не доступны для полета до тех пор, пока не предоставят релевантные данные плана полета.
Компьютеризированный способ может включать в себя прием в модуле ввода данных плана полета, соответствующих летательному аппарату, и формирование предупреждения в модуле предупреждения, если определяется, что информация о местоположении летательного аппарата отклоняется вертикально или горизонтально от данных плана полета на заданную величину. Это предупредит конечного пользователя об изменении курса летательного аппарата, что может требовать дополнительного расследования для определения, вызывает ли беспокойство неожиданное поведение летательного аппарата. Это помогает пользователям, которые могут контролировать большое количество летательных аппаратов, путем привлечения их внимания к определенному летательному аппарату, которому может понадобиться обсуждение в связи с неожиданным изменением траектории полета.
Кроме того, способ, не обязательно, может содержать прием в модуле ввода сообщений связи "диспетчер - пилот" по линии передачи данных (CPDLC), соответствующих летательному аппарату, и формирование предупреждения модулем предупреждения, если процессор определяет, что отклонение от данных плана полета не санкционировано в содержимом сообщений CPDLC. Это дает способу возможность определить, является ли неожиданное отклонение результатом договоренности между диспетчером и пилотом, при этом предупреждение может быть не нужно, или необходимо ли все же дополнительное расследование. Это помогает пользователю путем сокращения количества предупреждений, которые могут формироваться и требовать анализа в ситуациях, где диспетчер санкционировал или дал указание изменения маршрута летательного аппарата, которое в противном случае было бы неожиданным.
Компьютеризированный способ может формировать предупреждение в модуле предупреждения, если на основе информации о текущем местоположении летательного аппарата или данных плана полета определяется или предполагается, что летательный аппарат пересекает заданную область воздушного пространства. Эта область воздушного пространства может определяться выбором пользователя или штормовым предупреждением. Это преимущественно позволяет компьютеризированному способу автоматически предупреждать конечного пользователя, если предполагается, что летательный аппарат вошел, или уже вошел в нежелательное воздушное пространство, например зону военных действий, область, содержащую облако вулканического пепла, или иную область неблагоприятных погодных условий.
Предупреждение предпочтительно формируется в модуле предупреждения, если в процессоре определяется, что принятый ответный сигнал данных является отчетом об аварии или сообщением отказа соединения. Запрос контракта на передачу отчетов и соответствующие ответные сигналы данных предпочтительно соответствуют контрактному автоматическому зависимому наблюдению.
В одном варианте осуществления компьютеризированный способ дополнительно содержит прием в модуле ввода сообщений связи "диспетчер - пилот" по линии передачи данных (CPDLC), соответствующих летательному аппарату, сохранение сообщений CPDLC в хранилище данных и предоставление пользователю сообщений CPDLC по запросу пользователя. Предупреждения, которые сформированы, также могут сохраняться в хранилище данных и предоставляются пользователю по запросу пользователя. Это преимущественно помогает пользователю установить, обсуждалось ли между пилотом летательного аппарата и диспетчером ANSP событие, которое привело к формированию предупреждения.
Компьютеризированный способ в соответствии с первым аспектом изобретения может дополнительно содержать прием в модуле ввода сообщений уведомления средств обслуживания воздушного движения (AFN), соответствующих летательному аппарату; определение в процессоре, удовлетворяют ли принятые сообщения AFN одному или нескольким критериям сообщений AFN; и формирование предупреждения в модуле предупреждения на основе упомянутого определения.
В качестве альтернативы может предоставляться компьютеризированный способ для контроля состояния летательного аппарата, содержащий прием в модуле ввода сообщений уведомления средств обслуживания воздушного движения (AFN), соответствующих летательному аппарату; прием в модуле ввода информации о местоположении летательного аппарата, соответствующей летательному аппарату; определение в процессоре, удовлетворяют ли принятые сообщения AFN одному или нескольким критериям сообщений AFN; и формирование предупреждения в модуле предупреждения на основе упомянутого определения и информации о местоположении летательного аппарата.
Процессор предпочтительно может определить, удовлетворены ли критерии сообщений AFN, идентифицирующие период времени для приема сообщения подтверждения входа в FANS, и вызвать формирование предупреждения в модуле предупреждения, если сообщение подтверждения входа в FANS не принимается после того, как летательный аппарат находился в воздушном пространстве с поддержкой FANS в течение идентифицированного периода времени. Это привлечет внимание конечного пользователя, например оператора авиакомпании, к тому, что произошла неожиданная потеря контакта между летательным аппаратом и наземной системой FANS у ANSP.
Не обязательно, процессор может определить, удовлетворены ли критерии сообщений AFN, идентифицирующие период времени для приема сообщения подтверждения входа в FANS, и вызвать формирование предупреждения в модуле предупреждения, если сообщение подтверждения входа в FANS не принимается в идентифицированном периоде времени с момента отправки летательному аппарату консультативного сообщения контакту AFN. Это преимущественно привлечет внимание конечного пользователя к тому, что передача управления FANS между двумя ANSP не успешна, и что может быть желательно дополнительное расследование состояния летательного аппарата, чтобы устранить любые пропуски между отслеживанием ANSP летательного аппарата.
В соответствии со вторым аспектом изобретения предоставляется система для контроля состояния летательного аппарата. Система содержит модуль вывода, сконфигурированный для отправки запроса контракта на передачу отчетов в авиационную электронику летательного аппарата, где запрос контракта на передачу отчетов задает один или несколько критериев отчетов, по которым авиационной электронике летательного аппарата необходимо предоставлять системе ответный сигнал данных; модуль ввода, сконфигурированный для приема ответных сигналов данных, отправленных в систему из авиационной электроники летательного аппарата; процессор, сконфигурированный для определения, удовлетворяют ли принятые ответные сигналы данных одному или нескольким критериям предупреждения; и модуль предупреждения, сконфигурированный для формирования предупреждения на основе упомянутого определения.
Это преимущественно предоставляет систему, которая может инициировать с летательным аппаратом контракт на передачу отчетов, например контракт ADS, и предоставлять интеллектуальное предупреждение на основе критериев контракта на передачу отчетов и содержимого сообщений по контракту на передачу отчетов, которые принимаются или не принимаются.
Критерии отчетов предпочтительно задают первый интервал, в котором авиационной электронике летательного аппарата необходимо предоставлять ответный сигнал данных, критерии предупреждения задают второй интервал, и модуль предупреждения сконфигурирован для формирования предупреждения при отсутствии необходимого ответного сигнала данных, принимаемого в течение первого или второго интервала, заданных критериями, так что пользователя автоматически предупреждают, что не принято предполагаемое периодическое ответное сообщение сигнала данных по контракту на передачу отчетов. Не обязательно, критерии отчетов могут указывать, что необходим неотложный ответный сигнал данных от авиационной электроники летательного аппарата, и модуль предупреждения может конфигурироваться для формирования предупреждения при отсутствии ответа в интервале, заданном критериями предупреждения.
В предпочтительном варианте осуществления ответные сигналы данных, принимать которые сконфигурирован модуль ввода, содержат информацию о местоположении летательного аппарата, соответствующую летательному аппарату. Кроме того, модуль ввода может дополнительно конфигурироваться для приема данных плана полета и данных ACARS, соответствующих летательному аппарату, а модуль предупреждения может конфигурироваться для формирования предупреждения, если определяется, что принято сообщение изменения фазы полета, соответствующее летательному аппарату, но не приняты данные плана полета, соответствующие летательному аппарату. Это обеспечивает предупреждение, если летательный аппарат собирается взлетать или взлетел, но системой не принят план полета, соответствующий полету упомянутого летательного аппарата. Это желательно, поскольку отсутствие данных плана полета для летательного аппарата будет означать, что некоторые другие функции предупреждения могут быть не доступны для полета до тех пор, пока не предоставят релевантные данные плана полета.
Не обязательно, модуль ввода может конфигурироваться для приема данных плана полета, соответствующих летательному аппарату, а модуль предупреждения может конфигурироваться для формирования предупреждения, если процессор определяет, что информация о местоположении летательного аппарата указывает, что летательный аппарат отклонился вертикально или горизонтально на заданную величину от данных плана полета.
Модуль ввода предпочтительно дополнительно сконфигурирован для приема сообщений связи "диспетчер - пилот" по линии передачи данных (CPDLC), соответствующих летательному аппарату, и модуль предупреждения дополнительно сконфигурирован для формирования предупреждения, только если процессором определяется отклонение от данных плана полета, не санкционированное в содержимом сообщений CPDLC. Таким образом, можно сократить количество предупреждений, которые формируются системой, так что конечный пользователь может сосредоточиться на сформированных предупреждениях, которые могут требовать дополнительного расследования для проверки состояния контролируемого летательного аппарата.
Там, где модуль ввода сконфигурирован для приема данных плана полета, соответствующих летательному аппарату, модуль предупреждения может конфигурироваться для формирования предупреждения, если процессор на основе данных плана полета определяет или оценивает, что летательный аппарат будет пересекать заданную область воздушного пространства. Определение заданной области воздушного пространства может приниматься из выбора пользователя либо может быть предупреждением о неблагоприятных погодных условиях.
Модуль предупреждения в системе может конфигурироваться для формирования предупреждения, если процессор определяет, что принятый ответный сигнал данных является отчетом об аварии, или если процессором определяется, что ответный сигнал данных на запрос контракта на передачу отчетов является сообщением отказа соединения.
Модуль ввода в системе может дополнительно конфигурироваться для приема сообщений связи "диспетчер - пилот" по линии передачи данных (CPDLC), соответствующих летательному аппарату, а процессор может конфигурироваться для сохранения сообщений CPDLC в хранилище данных, так что они могут предоставляться пользователю по запросу пользователя. Это дает пользователю возможность расследования предупреждения для получения дополнительной информации о контексте состояния летательного аппарата в то время, когда было отмечено аварийное состояние.
Предпочтительно, чтобы запросы контрактов на передачу отчетов, отправлять которые сконфигурирован модуль вывода, и соответствующие ответы, принимать которые сконфигурирован модуль ввода, соответствовали контрактному автоматическому зависимому наблюдению. Система может дополнительно содержать хранилище данных, где процессор дополнительно сконфигурирован для сохранения в хранилище данных предупреждений, которые сформированы, и предоставления пользователю предупреждений, которые сформированы, по запросу пользователя.
Модуль ввода в системе в соответствии со вторым аспектом изобретения может дополнительно конфигурироваться для приема сообщений уведомления средств обслуживания воздушного движения (AFN), соответствующих летательному аппарату, а модуль предупреждения может конфигурироваться для формирования предупреждения, если процессор определяет, что сообщение подтверждения AFN не принято, когда ожидается, на основе информации о местоположении летательного аппарата.
В качестве альтернативы может предоставляться система для контроля состояния летательного аппарата, содержащая модуль ввода, сконфигурированный для приема сообщений уведомления средств обслуживания воздушного движения (AFN), соответствующих летательному аппарату, и информации о местоположении летательного аппарата, соответствующей летательному аппарату; процессор, сконфигурированный для определения, удовлетворяют ли принятые сообщения AFN одному или нескольким критериям сообщений AFN; и модуль предупреждения, сконфигурированный для формирования предупреждения на основе упомянутого определения и информации о местоположении летательного аппарата.
Критерии сообщений AFN предпочтительно идентифицируют период времени для приема сообщения подтверждения входа в FANS, и модуль предупреждения сконфигурирован для формирования предупреждения, если сообщение подтверждения входа в FANS не принято после того, как летательный аппарат находился в воздушном пространстве с поддержкой FANS в течение идентифицированного периода времени. Это привлечет внимание конечного пользователя, например оператора авиакомпании, к тому, что произошла неожиданная потеря контакта между летательным аппаратом и наземной системой FANS у ANSP.
Не обязательно, критерии сообщений AFN могут идентифицировать период времени для приема сообщения подтверждения входа в FANS, и модуль предупреждения может конфигурироваться для формирования предупреждения, если сообщение подтверждения входа в FANS не принято в идентифицированном периоде времени с момента отправки летательному аппарату консультативного сообщения контакту AFN. Это преимущественно привлечет внимание конечного пользователя к тому, что передача управления FANS между двумя ANSP не успешна, и что может быть желательно дополнительное расследование состояния летательного аппарата.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Сейчас будут описываться варианты осуществления изобретения только в качестве примера и со ссылкой на прилагаемые чертежи, на которых:
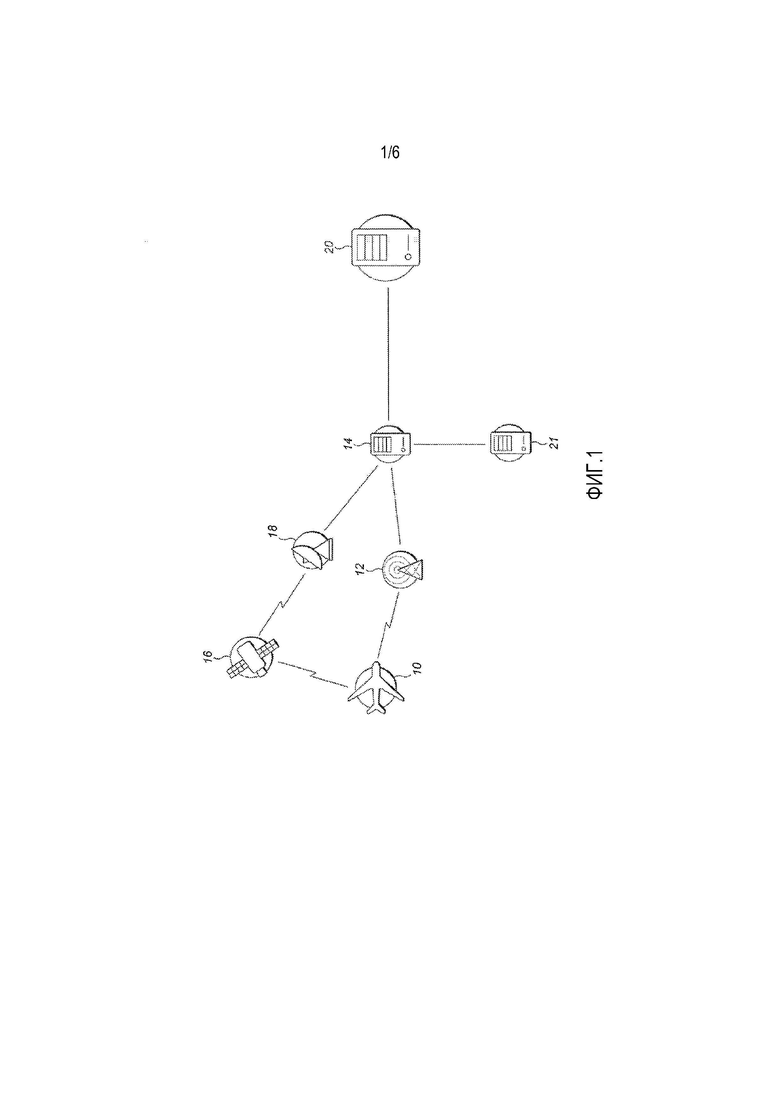
Фиг. 1 - схематическое представление системы в соответствии с вариантом осуществления изобретения, взаимодействующей с соответствующими источниками данных;
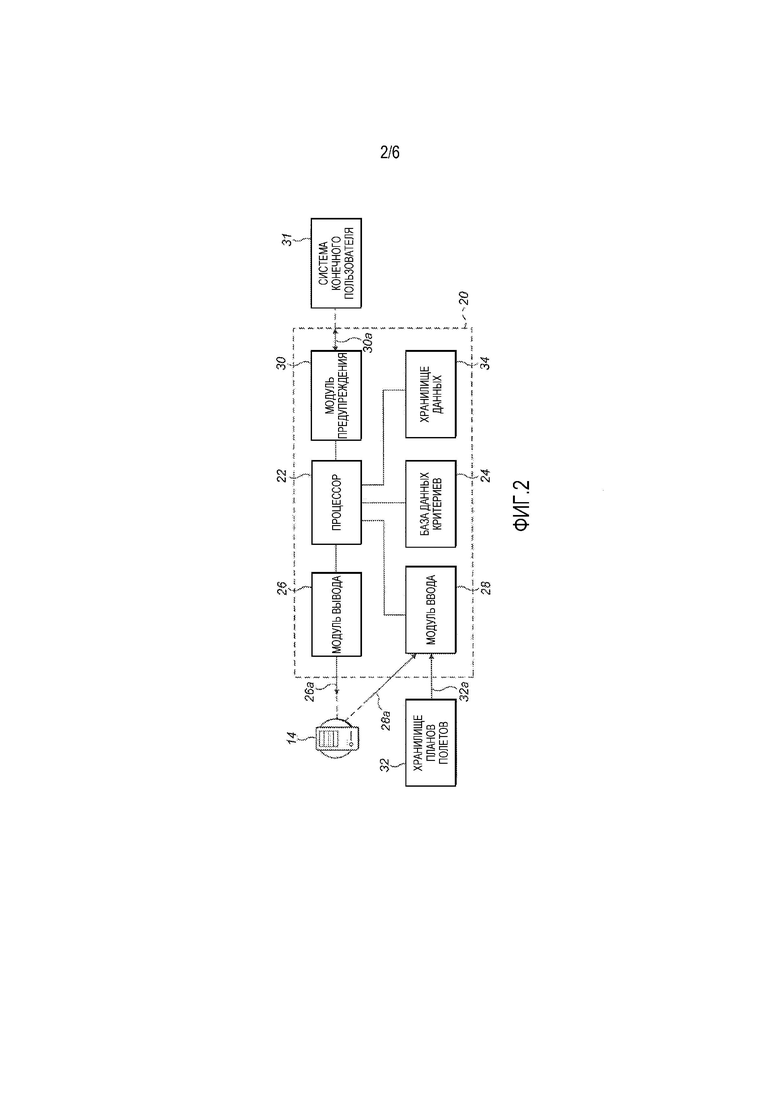
Фиг. 2 - схематическое представление системы в соответствии с вариантом осуществления изобретения;
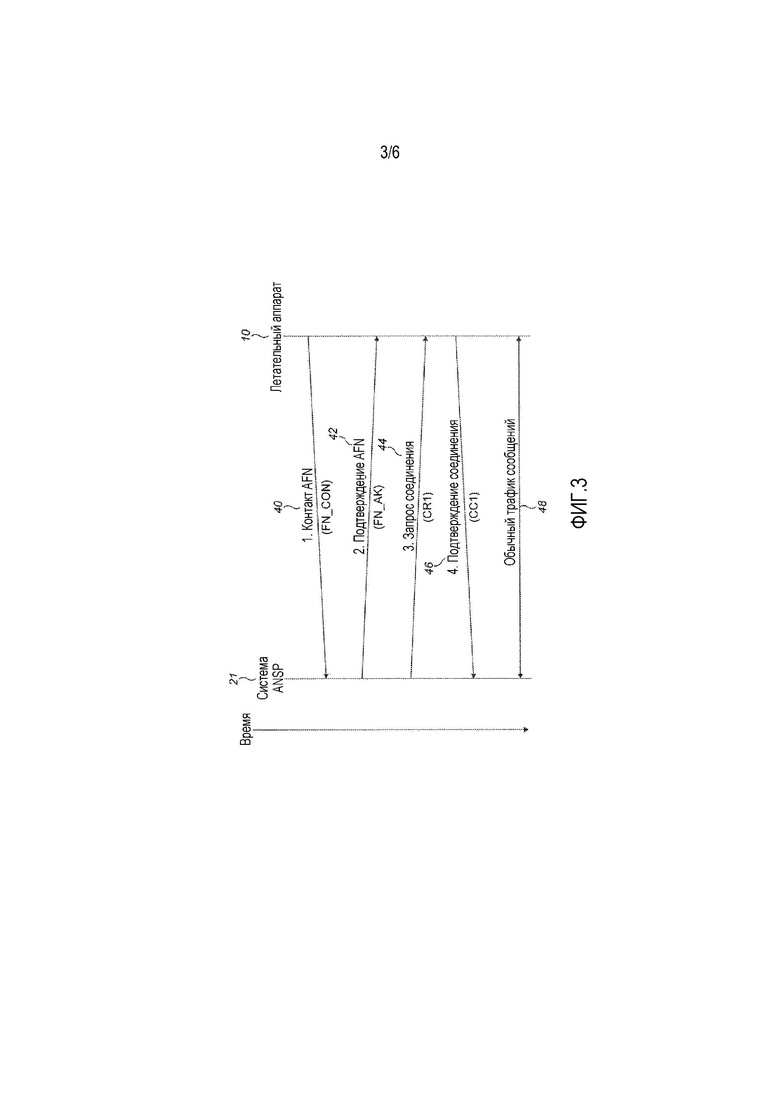
Фиг. 3 - схема передачи сообщений в процессе установления сеанса FANS с ANSP;
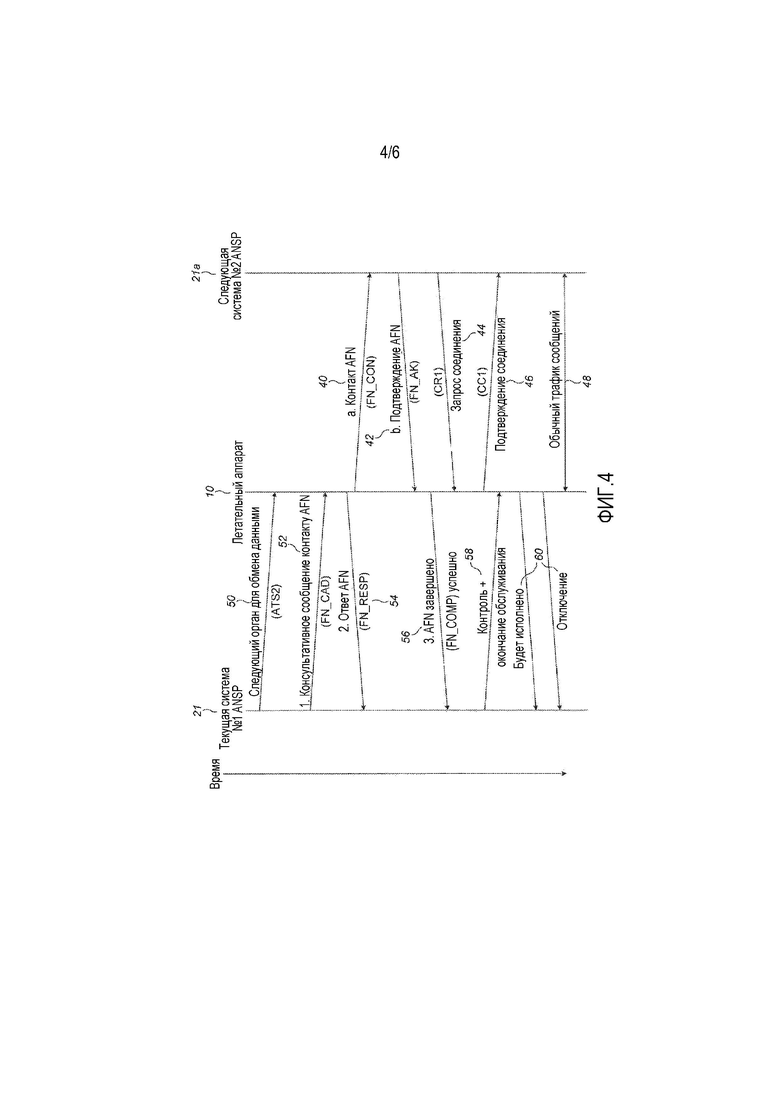
Фиг. 4 - схема передачи сообщений в процессе передачи управления сеансом FANS от текущего ANSP к следующему ANSP;
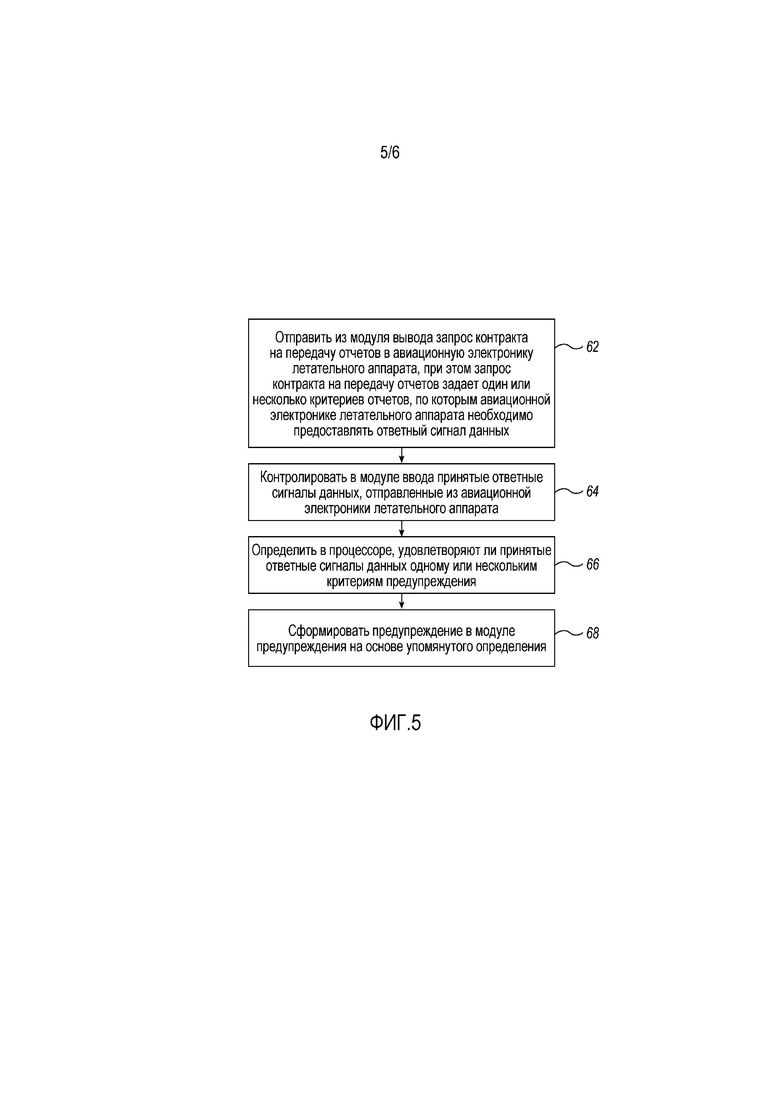
Фиг. 5 - блок-схема алгоритма, показывающая основные этапы, выполняемые вариантом осуществления изобретения;
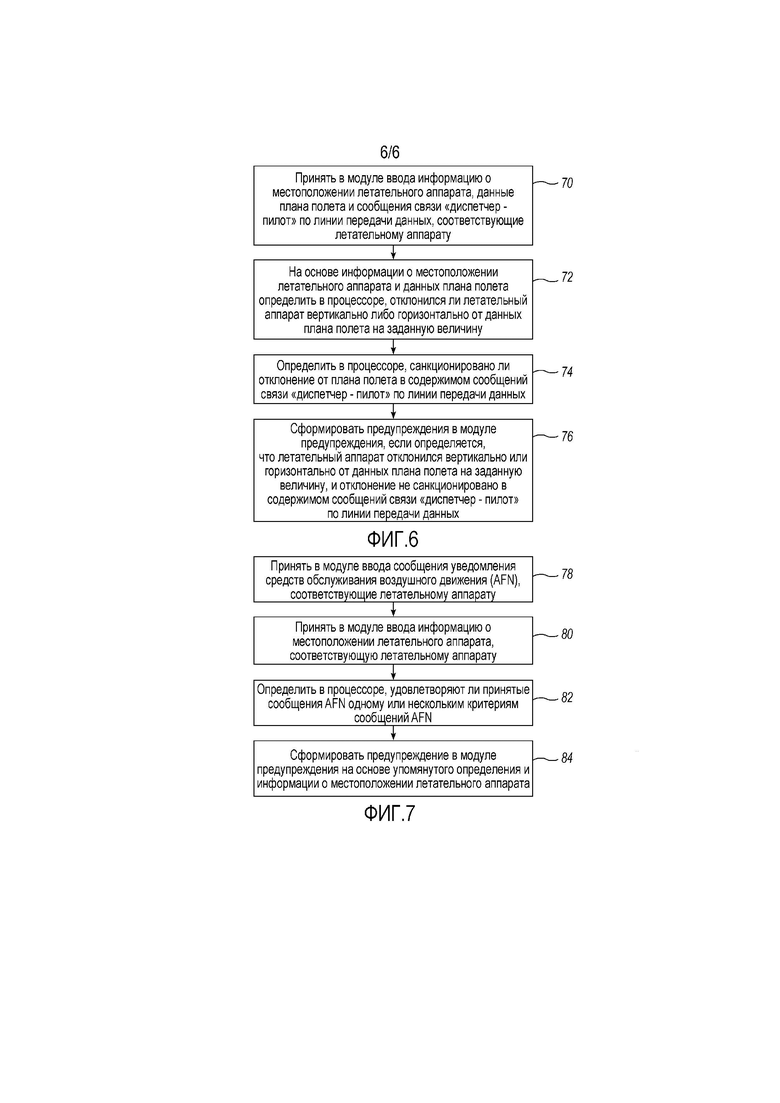
Фиг. 6 - блок-схема алгоритма, показывающая дополнительные этапы, которые могут выполняться вариантом осуществления изобретения; и
Фиг. 7 - блок-схема алгоритма, показывающая основные этапы, выполняемые альтернативным вариантом осуществления изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
Фиг. 1 показывает летательный аппарат 10, оборудованный авиационной электронной системой FANS для обеспечения цифрового канала передачи данных между летательным аппаратом 10 и одним или несколькими пользователями на земле. Цифровой канал передачи данных может передавать сообщения непосредственно одной или нескольким наземным станциям 12 ACARS, которые затем могут перенаправляться по сети 14 связи. Сеть связи может включать в себя одну или несколько из локальной сети (LAN), глобальной сети (WAN), Интернета, системы мобильной телефонной связи или системы спутниковой связи. В качестве альтернативы летательный аппарат может передавать сообщения ACARS по спутниковой линии 16 связи; в этом случае наземная станция была бы наземной станцией 18 спутниковой связи.
Сообщения ACARS, которые перенаправляются по сети 14 связи, затем отправляются и централизованно накапливаются системой 20. Эти сообщения ACARS могут включать в себя сообщения FANS, отправленные по протоколу ACARS, а также другие сообщения ACARS, например отчеты ACARS с информацией о местоположении летательного аппарата и сообщения OOOI, которые будут подробнее описываться ниже. Система 20 предназначена для контроля состояния летательного аппарата. Как правило, состояние летательного аппарата будет контролироваться во время полета летательного аппарата. В этом смысле полет считается включающим в себя наземные действия, например рулежку, с момента включения систем летательного аппарата в исходном местоположении до момента, когда системы летательного аппарата отключаются в предназначенном местоположении. Сеть 14 связи также может использоваться для направления связи между летательным аппаратом 12 и системой 21 поставщика аэронавигационных услуг (ANSP) или системой авиационного диспетчера (ATC), связанной со средством ATC.
Сеть 14 связи может быть любой общественной, частной, проводной или беспроводной сетью и может содержать любую подходящую инфраструктуру, включая медные кабели, оптические кабели или волокна, маршрутизаторы, межсетевые экраны, коммутаторы, шлюзовые компьютеры и пограничные серверы. Наземные станции 12 могут быть выполнены в виде наземных УКВ-станций или наземных КВ-станций, которые работают соответственно в УКВ или КВ радиочастотных диапазонах. Термин "наземная станция" используется в этом документе для ссылки на любую приемную станцию на уровне земли. Во избежание сомнения эти наземные станции могут включать в себя приемники, расположенные на океанических платформах, например установках для бурения, или плавучих основаниях, например танкерах или авианосцах.
Система 20 в соответствии с первым аспектом изобретения будет сейчас подробнее описываться со ссылкой на фиг. 2. Система 20 содержит процессор 22, который подключается к базе 24 данных критериев, модулю 26 вывода и модулю 28 ввода посредством соответствующих линий передачи данных. Модуль 26 вывода сконфигурирован для соединения с сетью 14 связи из фиг. 1 посредством соединения 26a, так что сообщения восходящей линии связи, выведенные из модуля 26 вывода, могут передаваться летательному аппарату 10 через одну или несколько наземных станций 12 или одну или несколько наземных станций 18 спутниковой связи с использованием спутниковой линии 16 связи.
Аналогичным образом модуль 28 ввода сконфигурирован для соединения с сетью 14 связи из фиг. 1 посредством соединения 28a, так что сообщения нисходящей линии связи, выведенные из летательного аппарата 10, могут приниматься в модуле 28 ввода через одну или несколько наземных станций 12 или одну или несколько наземных станций 18 спутниковой связи с использованием спутниковой линии 16 связи. Система дополнительно содержит модуль 30 предупреждения, который подключается к процессору 22 через дополнительную линию передачи данных и сконфигурирован для вывода одного или нескольких предупреждений конечному пользователю. Модуль 30 предупреждения может соединяться с системой 31 конечного пользователя посредством соединения 30a.
Не обязательно, модуль 28 ввода в системе 20 может дополнительно соединяться с хранилищем 32 планов полетов посредством соединения 32a. В этой связи нужно будет принять во внимание, что модуль 28 ввода может конфигурироваться для приема входных сообщений из множества источников, и что сообщения из каждого источника могут приниматься в отдельном подмодуле ввода, при этом соответствующие подмодули ввода образуют вместе модуль 28 ввода. Система 20, не обязательно, может дополнительно содержать хранилище 34 данных. В одном варианте осуществления хранилище 34 данных может быть подключено к процессору 22 с помощью линии передачи данных.
Чтобы инициировать контракт ADS с данным летательным аппаратом 10, процессор 22 может отправить модулю 26 вывода команды, однозначно идентифицирующие летательный аппарат и указывающие по меньшей мере один из критериев отчетов. Один или несколько критериев отчетов можно извлечь с помощью процессора 22 из базы 24 данных критериев, либо критерии отчетов в качестве альтернативы могут быть предоставлены системой 31 конечного пользователя, например посредством модуля 30 предупреждения и соединения 30a.
База 24 данных критериев может конфигурироваться для хранения одного или нескольких критериев отчетов для использования при определении типа контракта ADS, который следует организовать с данным летательным аппаратом, и при конфигурировании параметров контракта, например частоты отчетов нисходящей линии связи. Эти критерии отчетов могут быть критериями отчетов по умолчанию для заданного парка или типа летательного аппарата, либо они могут быть критериями отчетов, которые относятся, в частности, к конкретному полету или определенному летательному аппарату и которые были ранее предоставлены системой 31 конечного пользователя.
Критерии отчетов могут задавать, что контракт ADS является периодическим контрактом, контрактом по требованию или контрактом по событию. Периодический контракт позволяет конечному пользователю задавать интервал времени, в котором авиационным электронным системам летательного аппарата необходимо отправлять сообщение ADS-C, сообщающее информацию о состоянии летательного аппарата. Состояние летательного аппарата может содержать информацию, идентифицирующую местоположение летательного аппарата, его скорость и направление. В одном варианте осуществления этот интервал может составлять от 1 секунды до 4096 секунд (то есть приблизительно 68 минут), а в дополнительном варианте осуществления интервал может составлять от 64 секунд и 4096 секунд. Этот интервал можно изменять во время полета, чтобы предоставлять более частую информацию о положении, например в течение заданного сегмента полета или в случае, когда возникают вопросы касательно безопасности летательного аппарата.
В одном варианте осуществления, когда модуль 26 вывода принял подробности контракта ADS для заданного летательного аппарата, модуль 26 вывода может быть выполнен с возможностью обработки данных ADS-C, чтобы преобразовывать и инкапсулировать данные ADS-C, которые обычно имеют поразрядный формат данных, в соответствии с посимвольным протоколом связи ACARS, который обычно не совместим напрямую с данными FANS. Инкапсулированные подробности контракта ADS затем можно вывести из модуля 26 вывода в виде сообщения с запросом контракта на передачу отчетов посредством соединения 26a и передать авиационной электронике летательного аппарата по сети 14 связи и через одну или несколько наземных станций 12 или одну или несколько наземных станций 18 спутниковой связи, используя спутниковую линию 16 связи. В авиационной электронике летательного аппарата инкапсулированное сообщение можно преобразовать обратно в поразрядный формат и передать FMS летательного аппарата для обработки.
Затем FMS летательного аппарата может записать подробности контракта ADS и отправить подтверждение приема контракта в систему 20. Затем FMS летательного аппарата также может отправить системе 20 первый отчет ADS-C в виде ответного сигнала данных в ответ на новый контакт. Ответный сигнал данных кодируется как сигнал данных, чтобы его можно было передавать по сети передачи данных. Подтверждение приема и первый отчет могут передаваться в одном сообщении нисходящей линии связи либо, в качестве альтернативы, в виде отдельных сообщений нисходящей линии связи из FMS летательного аппарата в систему 20 через одну или несколько наземных станций 12 или одну или несколько наземных станций 18 спутниковой связи, используя спутниковую линию 16 связи и сеть 14 связи. Это сообщение нисходящей линии связи также можно инкапсулировать в протокол связи ACARS для передачи.
Сообщения нисходящей линии связи будут приняты в системе 20 модулем 28 ввода посредством соединения 28a, а затем модуль 28 ввода может передать процессору 22 сообщения, то есть ответный сигнал данных. В одном варианте осуществления модуль ввода может преобразовать инкапсулированное сообщение перед передачей сообщения процессору 22, так что процессор 22 может считать содержимое сообщения. Затем процессор 22 может сохранить данные, соответствующие принятому ответному сигналу данных, в хранилище 34 данных. Хранилище 34 данных может быть энергозависимым буферным запоминающим устройством либо циклическим буфером, либо хранилище 34 данных в качестве альтернативы может быть энергонезависимым запоминающим устройством, например жестким диском, гибким диском, магнитной лентой, твердотельным накопителем, сетью хранения данных или оптическими дисками.
Затем процессор 22 может сравнить содержимое принятого сообщения с одним или несколькими критериями предупреждения, хранимыми в базе 24 данных критериев, чтобы определить, соблюден ли один или несколько критериев предупреждения. Критерии предупреждения могут соответствовать критериям отчетов, как будет подробнее обсуждаться ниже.
Критерии предупреждения могут задавать, что в случае, когда процессор 22 определяет, что принятое сообщение является сообщением отказа соединения, процессор 22 должен побудить модуль 30 предупреждения сформировать предупреждение, а модуль 30 предупреждения может конфигурироваться для вывода предупреждения в систему 31 конечного пользователя посредством соединения 30a. Модуль 30 предупреждения может обработать предупреждение для форматирования предупредительного сообщения так, что оно считывается системой 31 конечного пользователя, и инкапсулировать предупреждение в заголовочный пакет, который включает в себя подходящую информацию о назначении для системы 31 конечного пользователя, перед выводом предупреждения.
Процессор 22 может конфигурироваться для повторной попытки соединения ADS-C в заданном периоде времени после приема сообщения отказа соединения, и это может конфигурироваться для повторения заданное количество раз или до тех пор, пока не примут подтверждение приема контракта. Заданный период времени может задаваться командой от системы 31 конечного пользователя. В одном варианте осуществления критерии предупреждения могут задавать, что система 20 попытается повторить соединение ADS-C без формирования предупреждения после приема от летательного аппарата 10 первого сообщения отказа соединения. В таком варианте осуществления критерии предупреждения могут задавать, что предупреждение может формироваться, если от летательного аппарата 10 принимается второе или последующее сообщение отказа соединения.
Критерии отчетов могут задавать, например, что ответный сигнал данных по периодическому контракту следует отправлять с летательного аппарата 10 в систему 20 каждые 60 секунд. Таким образом, критерии отчетов устанавливают соглашение между летательным аппаратом 10 и системой 20 контроля летательного аппарата касательно того, когда будет отправлен ответный сигнал данных из летательного аппарата 10 в систему 20 контроля летательного аппарата. Аналогичным образом критерии предупреждения могут задавать, что должно формироваться предупреждение, если ответный сигнал данных не принимается в периоде, идентифицированном критериями отчетов по периодическому контракту.
Когда процессор 22 принимает первый ответный сигнал данных от летательного аппарата 10, процессор 22 может инициировать таймер. После приема последующего ответного сигнала данных процессор 22 может сбросить таймер обратно в ноль. В случае, когда процессор 22 определяет, что таймер достиг 60 секунд, и последующий ответный сигнал данных не принят, процессор 22 может определить, что не удовлетворены критерии предупреждения (и критерии отчетов). Соответственно, процессор 22 может побудить модуль 30 предупреждения вывести предупреждение. Это предупреждение может сообщаться системе 31 конечного пользователя посредством соединения 30a.
Контракт по требованию позволяет запрашивать одиночный, одноразовый периодический отчет ADS-C, или ответный сигнал данных, у заданного летательного аппарата 10 в дополнение к любому периодическому контракту, который поддерживается в настоящее время. Этот тип отчета по контракту по требованию будет запрашиваться, как правило, только в ответ на особый запрос, принятый от системы 31 конечного пользователя, например, если система 31 конечного пользователя желает знать, где в тот момент времени находится данный летательный аппарат 10. Это может быть полезно в ситуациях, в которых текущий интервал по периодическому контракту сравнительно длинный, и некоторое время не ожидается следующий ответ по периодическому контракту.
Контракт по событию указывает FMS летательного аппарата, что ответный сигнал данных по контракту ADS следует передавать из летательного аппарата 10 в систему 20 всякий раз, когда происходит определенное событие. Например, событие может включать в себя событие изменения точки маршрута, происходящее в следующей и/или через одну точку маршрута в FMS. Это произошло бы вследствие изменения плана полета или изменения последовательности точек маршрута, и любые изменения точек маршрута сообщались бы системе 20 до тех пор, пока не отменят контракт по событию.
В качестве альтернативы определенным событием может быть предупреждение об отклонении диапазона эшелона, предупреждение о боковом отклонении или предупреждение об изменении вертикальной скорости. Каждое из этих предупреждений будет инициироваться только один раз, и соответственно система 20 должна заключить новый периодический контракт, если нужно дополнительное предупреждение того же типа. Предупреждение об отклонении диапазона эшелона инициируется, когда высота (или эшелон полета) летательного аппарата выходит за верхний предельный эшелон полета или за нижний предельный эшелон полета, эти ограничения эшелона полета обычно задаются в контракте ADS-C по событию.
Предупреждение о боковом отклонении будет инициировано, когда фактическое местоположение летательного аппарата превышает заданную пороговую величину расстояния отклонения от маршрута от предполагаемого положения летательного аппарата 10, которое задано в активном плане полета для летательного аппарата; пороговая величина обычно будет задана в контракте ADS-C по событию. Предупреждение об изменении вертикальной скорости будет инициировано, когда положительная или отрицательная вертикальная скорость подъема или снижения больше заданной пороговой величины.
Заявитель понял, что эти контракты ADS и связанные отчеты могут быть использованы авиакомпанией для улучшения контроля летательного аппарата 10 этой авиакомпании. Используя вышеупомянутые контракты ADS, система и способ из настоящего изобретения могут обеспечить продвинутое предупреждение касательно состояния контролируемого летательного аппарата. Как указано выше, система может формировать предупреждение, если необходимый по периодическому контракту ADS-C по событию ответ не принимается в подходящем интервале времени, заданном критериями отчетов и предупреждения.
В одном варианте осуществления процессор 22 может разрешить дополнительный период времени сверх заданного интервала перед определением, что критерии периодических отчетов не удовлетворены, и формированием предупреждения. Например, если критерии отчетов в периодическом контракте ADS-C по событию задают, что ответное сообщение следует отправлять из летательного аппарата 10 в систему 20 каждые 60 секунд, то критерии предупреждения могут задавать, что процессор разрешает таймеру достичь 70 секунд с момента предыдущего ответного сообщения без принятия следующего ответного сообщения перед побуждением модуля 30 предупреждения сформировать предупреждение. Таким образом, критерии предупреждения могут допускать дополнительный 10-секундный период. Этот дополнительный период может быть вторым интервалом в 10 секунд, который начинается при истечении первого периода (то есть 60-секундного периода в вышеупомянутом случае), либо, в качестве альтернативы, он может быть вторым периодом, который идет одновременно с первым периодом (то есть 70-секундным периодом в вышеупомянутом случае).
Этот дополнительный период времени позволит системе 20 уменьшить ложное предупреждение и учитывать небольшие колебания времени передачи каждого сообщения из летательного аппарата 10 в систему 20. Этот дополнительный период времени может быть неизменным периодом, либо дополнительный период в качестве альтернативы может быть процентным отношением интервала, заданного периодическим контрактом ADS-C по событию.
Аналогичным образом, если система 20 отправляет заданному летательному аппарату 10 запрос контракта ADS-C по событию, то система 20 может конфигурироваться для формирования предупреждения, если ответ на запрос контракта ADS-C по событию не принимается в заданном периоде времени. Например, этот период времени может составлять 10 секунд, 20 секунд, 1 минуту или любой другой нужный период времени.
В дополнение к приему ответных сообщений сигнала данных ADS-C система 20 может конфигурироваться для приема других сообщений ACARS от летательного аппарата 10 по сети 14 связи и через модуль 28 ввода. Например, система 20 может принимать от летательного аппарата 10 стандартные отчеты о положении ACARS и/или отчеты ACARS касательно изменений основных фаз полета. Эти основные фазы полета обычно называются событиями OOOI и могут использоваться для указания, что летательный аппарат 10 находится "вне стоянки", "в воздухе", "на земле" или "на стоянке". Во избежание сомнения модуль 28 ввода в системе контроля летательного аппарата также может конфигурироваться для приема информации о местоположении летательного аппарата из не относящихся к ACARS источников, например радиолокационных данных или данных автоматического зависимого наблюдения в режиме вещания (ADS-B). В вариантах осуществления, в которых модуль 28 ввода в системе 20 соединяется с хранилищем 32 планов полетов посредством соединения 32a, система также может конфигурироваться для приема компьютерного плана полета для полета данного летательного аппарата.
Если процессор 22 определяет, что летательный аппарат 10 отклонился от плана полета больше чем на заданную величину, то процессор 22 может конфигурироваться для побуждения модуля 30 предупреждения сформировать предупреждение. Эта заданная величина могла бы быть неизменным значением или процентным отношением. Отклонение может быть вертикальным отклонением/отклонением эшелона полета (например, 200 футов или изменением 2 в эшелоне полета) и/или горизонтальным/боковым отклонением (например, 5 морских миль). Отклонение может вычисляться процессором 22 путем сравнения информации о местоположении летательного аппарата, принятой от летательного аппарата 10, с данными плана полета, принятыми системой 20 из хранилища 32 планов полетов.
В качестве альтернативы процессор 22 может определить, что произошло отклонение эшелона полета (вертикальное) или боковое (горизонтальное) отклонение, путем приема ответного сообщения по контракту ADS-C по событию, указывающего событие отклонения диапазона эшелона или событие бокового отклонения. Ответные сигналы данных события отклонения диапазона эшелона и события бокового отклонения будут определены на основе активного плана полета летательного аппарата, который хранится в FMS летательного аппарата. Активный план полета летательного аппарата может изменяться при полете и соответственно может меняться по сравнению с компьютерным планом полета, принятым системой 20 из хранилища 32 планов полетов. Поэтому предупреждения об отклонении могут формироваться системой 20 на основе данных компьютерного плана полета без ответного сообщения по контракту ADS-C по событию, указывающего соответствующее отклонение, или наоборот. Эти предупреждения об отклонении могут дать пользователям возможность быстро идентифицировать летательный аппарат, который мог столкнуться с изменением маршрута, и оценить любые косвенные воздействия, которые оно может оказать на время прибытия летательного аппарата и любые будущие полеты, к которым летательный аппарат или его экипаж планируют приступить.
В одном варианте осуществления модуль 28 ввода может конфигурироваться для приема сообщений CPDLC, соответствующих заданному летательному аппарату 10, по сети 14 связи и соединению 28a. Эти сообщения CPDLC обычно являются связью между диспетчером услуги ATC или ANSP и пилотом летательного аппарата 10. Однако там, где эта связь передается по сети 14 связи, копии этих сообщений CPDLC могут перенаправляться сетью 14 связи в систему 20.
В таком варианте осуществления процессор 22 может принимать сообщения CPDLC, соответствующие летательному аппарату 10, и обрабатывать сообщения CPDLC для определения, санкционировано ли вертикальное или горизонтальное отклонение летательного аппарата 10 диспетчером в содержимом сообщений CPDLC, например, была ли команда подъема либо снижения. Если процессор 22 определяет, что отклонение санкционировано, то процессор 22 может побудить модуль 30 предупреждения вывести указание с предупредительным сообщением об отклонении, чтобы указать, что отклонение было санкционировано диспетчером. В качестве альтернативы процессор 22 может определить, что модулю 30 предупреждения не следует формировать предупреждение, если отклонение санкционировано диспетчером.
Содержимое сообщений CPDLC обычно придерживается стандартного формата, и процессор 22 может соответственно конфигурироваться для анализа этой информации и определения смысла сообщений. Также процессор 22 может побудить сохранение принятых сообщений CPDLC в хранилище 34 данных для архивирования или последующего извлечения. Например, эти сообщения CPDLC могут предоставляться системе 31 конечного пользователя модулем 30 предупреждения по запросу пользователя системы 31 конечного пользователя.
В одном варианте осуществления процессор 22 может конфигурироваться для побуждения модуля 30 предупреждения вывести содержимое, или сводку содержимого, принятых недавно сообщений CPDLC с любыми предупреждениями, которые формируются модулем 30 предупреждения. В таком варианте осуществления система 20 может отправить предупреждение системе 31 конечного пользователя с сопроводительными сообщениями CPDLC, так что конечный пользователь системы 31 конечного пользователя может вручную определить, было ли санкционировано отклонение в сообщениях CPDLC. В этом случае процессору 22 может быть не нужно анализировать сообщения CPDLC или определять смысл сообщений.
Система 20 может предпочтительно давать пользователю возможность задавать область воздушного пространства, ограниченную некой формой или многоугольником. Тогда критерии предупреждения и процессор 22 могут побудить модуль 30 предупреждения сформировать предупреждение, если местоположение данного летательного аппарата определяется входящим или находящимся в области, ограниченной той формой. В качестве альтернативы критерии предупреждения и процессор 22 могут побудить модуль 30 предупреждения сформировать предупреждение, если определяется, что компьютерный план полета или активный план полета летательного аппарата пересекает область, ограниченную формой.
Форма может задаваться путем нажатия на последовательность точек на карте или ввода последовательности координат; затем эти точки можно использовать для создания контура или границы формы, и форму можно дополнительно ассоциировать с заданным эшелоном полета или диапазоном эшелонов полета, чтобы задать объем воздушного пространства. Форма, не обязательно, при необходимости может ассоциироваться с начальной датой и временем и/или конечной датой и временем. Критерии предупреждения и процессор 22 могут вызвать отмену или сброс предупреждения в случае, когда определяется, что летательный аппарат 10 покинул область, ассоциированную с формой, или если план полета изменяется так, что он уже не пересекает область, ограниченную формой.
В качестве альтернативы форма может быть стандартной областью воздушного пространства, например районом полетной информации (FIR) и/или верхним районом информации (UIR), либо может задаваться внешним источником, например погодным слоем от метеорологической службы. Погодный слой может указывать область неблагоприятных погодных условий, например предупреждение о вулканическом пепле, условия обледенения или турбулентность и т. п.
Если процессор 22 определяет, что от летательного аппарата 10 принято сообщение изменения фазы полета (например, сообщение о событии OOOI вне стоянки или в воздухе), но компьютерный план полета, соответствующий текущему полету летательного аппарата 10, не принят из хранилища 32 планов полетов, то критерии предупреждения и процессор 22 могут побудить модуль 30 предупреждения сформировать предупреждение. Это желательно, потому что при отсутствии компьютерного плана полета для полета некоторые из других функций предупреждения не будут функциональны, так как они требуют, чтобы процессор 22 сравнивал принятую информацию о местоположении летательного аппарата с принятым компьютерным планом полета, чтобы определить, следует ли формировать предупреждение.
Принятый компьютерный план полета может включать в себя предполагаемое время вылета (ETD) и предполагаемое время прибытия (ETA) для релевантного полета летательного аппарата 10. Если процессор 22 определяет, что ETA прошло, но сообщение изменения фазы полета - событие OOOI на земле - не принято от летательного аппарата 10, то процессор может побудить модуль 30 предупреждения сформировать предупреждение. Это может указывать конечному пользователю, что летательный аппарат 10 опаздывает, и может быть необходимо дополнительное расследование или устранение несоответствий. В одном варианте осуществления процессор 22 может побудить модуль 30 предупреждения сформировать предупреждение только после истечения дополнительного периода времени, при этом дополнительный период времени начинается в ETA. Например, предупреждение может формироваться, если определяется, что летательный аппарат опаздывает в приземлении на 5 или более минут.
Если во время полета от летательного аппарата 10 принимается скорректированное ETA, то это скорректированное ETA может использоваться вместо ETA из компьютерного плана полета. Кроме того, если ETA не принимается для данного полета летательного аппарата 10, но принято сообщение изменения фазы полета - событие OOOI в воздухе, то процессор 22 в системе 20 может определить ETA для полета путем получения времени смещения между запланированным временем вылета и отметкой времени сообщения о событии OOOI в воздухе и применения времени смещения к запланированному времени прибытия.
Связь ADS-C также поддерживает аварийное предупреждение, при помощи чего периодический отчет, который помечается как отчет об аварии, передается от летательного аппарата 10 любой из подключенных наземных систем в качестве ответного сигнала данных. Эта функция может инициироваться экипажем вручную путем выбора аварийной функции ADS-C или косвенно путем инициирования другого типа системы предупреждений в авиационной электронике летательного аппарата. Если процессор 22 определяет, что ответный сигнал данных ADS-C, принятый в модуле 28 ввода, является отчетом об аварии, то критерии предупреждения и процессор 22 могут побудить модуль 30 предупреждения сформировать соответствующее предупреждение для вывода в систему 31 конечного пользователя.
Критерии предупреждения и процессор 22 могут конфигурироваться для побуждения формирования предупреждения, только если принимается больше заданного количества отчетов об аварии, или если отчеты об аварии принимаются больше заданной длительности времени. Это может помочь идентифицировать (и, не обязательно, игнорировать) кратковременные предупреждения, которые могли быть инициированы случайно.
Если процессор 22 определяет, что летательный аппарат завершил разворот на 360 градусов, то критерии предупреждения могут задавать, что процессор 22 может побудить модуль 30 предупреждения сформировать предупреждение для указания, что летательный аппарат, вероятно, находится в зоне ожидания. Это предупреждение может быть удалено процессором 22, если определяется, что никакие дополнительные развороты на 360 градусов не обнаружены в дополнительном периоде времени, например в течение 5 минут. Этот тип предупреждения потребовал бы сравнительно короткого интервала передачи отчетов, так что разворот на 360 градусов можно проложить точно. Не обязательно, система 20 может принять дополнительный ввод данных о положении летательного аппарата, например отчеты о положении по автоматическому зависимому наблюдению в режиме вещания (ADS-B). Не обязательно, может формироваться предупреждение о вынужденном изменении, если системой 20 принимается сообщение о вынужденном изменении, соответствующее контролируемому летательному аппарату 10.
Если процессор 22 определяет, что летательный аппарат 10, который находится на земле и перед вылетом, то есть принято сообщение изменения фазы полета - событие OOOI вне стоянки, но не принято сообщение изменения фазы полета - событие OOOI в воздухе, и летательный аппарат 10 превысил заданную скорость, а затем замедлился ниже той скорости, то критерии предупреждения и процессор 22 могут побудить модуль 30 предупреждения сформировать предупреждение. Это предупреждение может указывать, что произошел прерванный взлет. Аналогичным образом, если процессор 22 определяет, что летательный аппарат 10 снизился ниже заданной высоты (например, 10000 футов), а затем поднялся выше заданной высоты более чем на заданную величину (например, 1000 футов), то критерии предупреждения и процессор 22 могут побудить модуль 30 предупреждения сформировать предупреждение для указания, что летательному аппарату 10 необходимо "уйти на второй круг".
Если ATC или ANSP, который контролирует воздушное пространство, в котором находится летательный аппарат 10, обладает поддержкой FANS, то ATC или ANSP может организовать сеанс по активному каналу передачи данных с летательным аппаратом 10. Как правило, соединение FANS следует устанавливать примерно за 30-45 минут перед входом в воздушное пространство у ANSP с поддержкой FANS.
Процесс установления сеанса FANS с ANSP сейчас будет описываться со ссылкой на фиг. 3. Фиг. 3 иллюстрирует временную шкалу сообщений между системой 21 ANSP и летательным аппаратом 10. Этот процесс информирует релевантный ANSP о возможностях канала передачи данных у летательного аппарата 10 и дает ANSP возможность соотнести связь летательного аппарата с зарегистрированным планом полета.
Когда между летательным аппаратом 10 и предыдущим ANSP не установлено никакое другое соединение FANS, система 21 ANSP и летательный аппарат 10 предпочтительно обмениваются сообщениями уведомления средств обслуживания воздушного движения (AFN). Это сообщение является средством, с помощью которого летательный аппарат 10 может представить себя ANSP, чтобы ANSP знал регистрационный номер летательного аппарата и приложения цифрового канала передачи данных, которые поддерживает летательный аппарат 10. Сначала пилот побуждает летательный аппарат 10 отправить системе 21 ANSP сообщение 40 с контактом AFN, тогда система ANSP ответит на это сообщение сообщением 42 подтверждения AFN. Сообщение 42 подтверждения AFN также можно описать как сообщение подтверждения входа в FANS.
Затем система 21 ANSP инициирует соединение CPDLC путем отправки летательному аппарату 10 сообщения 44 с запросом соединения, на которое летательный аппарат обычно ответил бы сообщением 46 подтверждения соединения. Как только соединение установлено и активно, может осуществляться двунаправленный обмен сообщениями 48 CPDLC. Если соединение прервано, то необходимо повторить полную процедуру входа, чтобы восстановить соединение.
Сеть 14 связи может конфигурироваться для перенаправления этих сообщений AFN в систему 20, а модуль 28 ввода может конфигурироваться для приема этих сообщений AFN. Кроме того, процессор 22 может конфигурироваться для определения, удовлетворяют ли принятые сообщения AFN критериям сообщений AFN, и побуждения модуля 30 предупреждения сформировать предупреждение на основе определения. Например, критерии сообщений AFN могут задавать, что данная область воздушного пространства контролируется ANSP с поддержкой FANS, и предполагается, что летательный аппарат имеет активный сеанс FANS с ANSP, находясь или приближаясь к той области воздушного пространства. Таким образом, критерии сообщений AFN могут служить для задания, когда нужно ожидать данные сообщения AFN, и при каких условиях следует формировать предупреждение, например, при отсутствии предполагаемого сообщения AFN.
Если процессор 22 определяет, что сообщение 42 подтверждения AFN (сообщение подтверждения входа в FANS) не принято после того, как летательный аппарат 10 находился в воздушном пространстве с поддержкой FANS в течение периода времени, идентифицированного критериями сообщений AFN, то процессор 22 может побудить модуль 30 предупреждения сформировать предупреждение. Это предупреждение привлекло бы внимание пользователя к тому, что летательный аппарат 10 не установил активный сеанс FANS с ANSP, когда это ожидается.
Когда летательный аппарат 10 приближается к границе между двумя ANSP с поддержкой FANS, текущий ANSP даст указание авиационной электронике летательного аппарата, что нужно установить соединение со следующим ANSP. Этот процесс будет описываться со ссылкой на фиг. 4, которая показывает текущую систему 21 ANSP, инициирующую процесс путем отправки летательному аппарату 10 сообщения 50 следующего органа для обмена данными, где это сообщение идентифицирует следующую систему 21a ANSP. Затем текущая система 21 ANSP может отправить летательному аппарату 10 консультативное сообщение 52 контакту AFN, которое может быть подтверждено летательным аппаратом 10 с помощью ответа 54 AFN.
Затем летательный аппарат 10 может отправить сообщение 40 с контактом AFN следующей системе 21a ANSP и принять сообщение 42 подтверждения AFN от следующей системы 21a ANSP. Когда летательный аппарат 10 принял сообщение 42 подтверждения AFN, он обычно отправляет текущей системе 21 ANSP сообщение 56 завершения AFN, чтобы информировать текущего ANSP, что процесс AFN завершен следующим ANSP. Текущий ANSP может продолжать контролировать летательный аппарат 10 до тех пор, пока летательный аппарат не приблизится к границе сектора воздушного пространства, контролируемого текущим ANSP, и в той точке текущий ANSP может отправить летательному аппарату 10 сообщение 58 окончания обслуживания. Не обязательно, летательный аппарат 10 может отправить сообщения 60 "будет исполнено" и отключения, чтобы подтвердить, что соединение CPDLC с ANSP прервано.
Следующий ANSP может инициировать соединение CPDLC путем отправки летательному аппарату 10 сообщения 44 с запросом соединения, на которое летательный аппарат обычно ответил бы сообщением 46 подтверждения соединения. Как только соединение установлено и активно, может осуществляться двунаправленный обмен сообщениями 48 CPDLC между летательным аппаратом 10 и следующей системой 21a ANSP.
Если процессор 22 определяет, что сообщение 42 подтверждения AFN (сообщение подтверждения входа в FANS) не принято в заданном периоде времени отправки текущим ANSP летательному аппарату 10 консультативного сообщения 52 контакту AFN, то критерии сообщений AFN и процессор 22 могут побудить модуль 30 предупреждения сформировать предупреждение. Период времени можно идентифицировать по критериям сообщений AFN. Это предупреждение привлекло бы внимание пользователя к тому, что летательный аппарат 10 не установил активный сеанс FANS со следующим ANSP, когда это ожидается.
Второй аспект изобретения предоставляет компьютеризированный способ для контроля состояния летательного аппарата, который сейчас будет описываться со ссылкой на фиг. 5. Способ содержит отправку (62) от модуля 26 вывода авиационной электронике летательного аппарата запроса контракта на передачу отчетов, задающего один или несколько критериев отчетов. Запрос контракта на передачу отчетов может задавать один или несколько критериев отчетов, по которым авиационной электронике летательного аппарата необходимо предоставлять системе контроля летательного аппарата ответный сигнал данных. Эти ответные сигналы данных затем контролируются и принимаются (64) от авиационной электроники летательного аппарата 10 в модуле 28 ввода в системе контроля летательного аппарата. Контракт на передачу отчетов обычно будет контрактом ADS, а критерии отчетов, связанные с запросом контакта на передачу отчетов, могут быть периодическими, основанными на событиях или на требованиях критериями. Способ дополнительно содержит определение (66) в процессоре 22, удовлетворяют ли принятые ответные сигналы данных одному или нескольким критериям предупреждения. Например, критерии отчетов могут задавать периодический интервал, в котором авиационной электронике летательного аппарата необходимо предоставлять ответ, и может формироваться (68) предупреждение, если процессор 22 определяет, что необходимый ответ не принят в течение интервала, заданного одним или несколькими критериями предупреждения. Как описано выше, интервал, заданный критериями предупреждения, может быть таким же, как периодический интервал, заданный критериями отчетов, или длиннее.
Ответы предпочтительно содержат информацию о местоположении летательного аппарата, соответствующую летательному аппарату 10. Кроме того, из базы 24 данных критериев могут быть приняты один или несколько критериев отчетов и один или несколько критериев предупреждения. Компьютеризированный способ может содержать определение, принято ли сообщение изменения фазы полета ACARS, например сообщение о событии OOOI "вне стоянки" или "в воздухе", для полета данного летательного аппарата, и приняты ли данные плана полета для упомянутого полета. Если процессором 22 определяется, что принято сообщение изменения фазы полета, но не приняты соответствующие данные плана полета, то способ может содержать формирование предупреждения для привлечения внимания системы 31 конечного пользователя или конечного пользователя к этому. Это дает возможность пользователю узнать о том, что летательный аппарат 10 собирается взлетать или взлетел, но способ не способен предоставлять предупреждения, которые требуют сравнения ответов, принятых от авиационной электроники летательного аппарата, с планом полета, соответствующим текущему полету упомянутого летательного аппарата.
Как показано на фиг. 6, компьютеризированный способ может дополнительно содержать прием (70) в модуле ввода информации о местоположении летательного аппарата, данных плана полета и сообщений связи "диспетчер - пилот" по линии передачи данных, соответствующих летательному аппарату 10, и определение (72) на основе информации о местоположении летательного аппарата и данных плана полета, отклонился ли летательный аппарат вертикально либо горизонтально от данных плана полета на заданную величину. Если определяется, что летательный аппарат 10 отклонился на заданную величину или больше, то способ дополнительно содержит определение (74) в процессоре 22, санкционировано ли отклонение от плана полета в содержимом сообщений связи "диспетчер - пилот" по линии передачи данных.
Если определяется, что летательный аппарат 10 отклонился вертикально или горизонтально от данных плана полета на заданную величину, и отклонение не санкционировано в содержимом сообщений связи "диспетчер - пилот" по линии передачи данных, то способ содержит формирование (76) предупреждения в модуле 30 предупреждения.
В дополнительных вариантах осуществления способ может содержать формирование предупреждения, если информация о местоположении летательного аппарата указывает, что летательный аппарат 10 находится в заданной области воздушного пространства. Не обязательно, предупреждение может формироваться, если данные плана полета указывают, что предполагается пересечение летательным аппаратом такой заданной области воздушного пространства в будущем.
Способ может дополнительно содержать обработку принятых сообщений для определения, является ли принятый ответный сигнал данных отчетом об аварии или сообщением отказа соединения. Если принятый ответный сигнал данных определяется способом как отчет об аварии или сообщение отказа соединения, то предпочтительно формируется предупреждение в модуле предупреждения. Это привлечет внимание соответственно к аварийным ситуациям или ситуациям, в которых соединение FANS неуспешно.
Способ может дополнительно содержать сохранение принятых сообщений CPDLC и/или сформированных предупреждений в хранилище 34 данных, где сообщения CPDLC и /или сформированные предупреждения можно извлекать из хранилища данных и предоставлять пользователю по запросу пользователя.
Со ссылкой на фиг. 7 компьютеризированный способ для контроля состояния летательного аппарата может принимать (78) в модуле ввода сообщения уведомления средств обслуживания воздушного движения (AFN), соответствующие летательному аппарату, и принимать (80) в модуле ввода информацию о местоположении летательного аппарата, соответствующую летательному аппарату. Способ из фиг. 7 дополнительно определяет (82) в процессоре, удовлетворяют ли принятые сообщения AFN одному или нескольким критериям сообщений AFN, и формирует (84) предупреждение в модуле предупреждения на основе упомянутого определения и информации о местоположении летательного аппарата.
Например, критерии сообщений AFN могут задавать, что заданная область или сектор воздушного пространства контролируется ANSP с поддержкой FANS, и соответственно предполагается, что входящий в тот сектор воздушного пространства летательный аппарат с поддержкой FANS имеет активный сеанс FANS с релевантным ANSP. Если сообщение подтверждения входа в FANS (сообщение подтверждения AFN) не принято ко времени входа летательного аппарата в сектор или после того, как летательный аппарат находился в секторе в течение заданного периода времени, то способ может включать в себя формирование соответствующего предупреждения.
Аналогичным образом, если летательный аппарат 10 с поддержкой FANS имеет активный сеанс FANS с ANSP в секторе, в котором летательный аппарат находится в настоящее время, и летательный аппарат приближается к другому ANSP с поддержкой FANS, то предполагается, что текущий ANSP 21 отправляет летательному аппарату 10 консультативное сообщение контакту AFN, чтобы идентифицировать следующий ANSP 21a и инициировать процесс автоматической передачи управления.
Если способ определяет, что летательному аппарату 10 отправлено консультативное сообщение контакту AFN, но не принято сообщение подтверждения входа в FANS в заданном периоде времени, то критерии сообщений AFN могут задавать, что способ должен перейти к формированию подходящего предупреждения, чтобы привлечь внимание пользователя к тому, что процесс автоматической передачи управления между ANSP не выглядит успешным.
Каждый блок на описанных выше блок-схемах алгоритмов может представлять собой модуль, содержащий одну или несколько исполняемых машинных команд, или часть команды, для реализации логической функции, заданной в блоке. Порядок блоков на схеме предназначен только для пояснения примера. В альтернативных реализациях логические функции, проиллюстрированные в конкретных блоках, могут происходить не в порядке, отмеченном на фигурах. Например, процессы, связанные с двумя блоками, могут осуществляться одновременно или, в зависимости от функциональных возможностей, в обратном порядке. Каждый блок на блок-схеме алгоритма можно реализовать в программном обеспечении, аппаратных средствах или сочетании программного обеспечения и аппаратных средств.
Может предоставляться интерфейсное программное обеспечение для упрощения интерфейса между пользователем системы 31 конечного пользователя и системой 20. Интерфейсное программное обеспечение может обеспечивать географическое отображение с контролируемым летательным аппаратом, изображенным с помощью соответствующих пиктограмм. Интерфейсное программное обеспечение может отображать конечному пользователю визуальные и/или слышимые предупреждения, когда сформированное предупреждение выводится модулем 30 предупреждения. Такие события, как входы AFN и сообщения отказа соединения, можно показывать визуально на географическом отображении в местоположении, в котором произошло событие.
Графический интерфейс пользователя в интерфейсном программном обеспечении также может позволять пользователю анализировать предупреждающую информацию, отменять, игнорировать или удалять заданное предупреждение либо извлекать сообщения CPDLC, которыми обменивались примерно во время предупреждения или события, которое вызвало формирование предупреждения. В одном варианте осуществления к этой информации можно обращаться путем нажатия на пиктограмму, соответствующую данному летательному аппарату 10. Кроме того, интерфейсное программное обеспечение может содержать конфигурируемую административную функцию, которая позволяет конечному пользователю настраивать параметры контракта ADS, чтобы адаптивно уравновешивать влияния на стоимость и производительность соответствующего обмена сообщениями ACARS для данного полета или летательного аппарата 10.
Графический интерфейс пользователя может включать в себя пиктограмму, связанную с контролируемым летательным аппаратом 10, или пиктограмма для летательного аппарата может иметь заданный цвет для указания, что у летательного аппарата есть активный сеанс FANS. Кроме того, отчеты о положении для каждого летательного аппарата 10 можно идентифицировать по их источнику, например информации о положении ADS-C вместо стандартной информации о положении ACARS, или любому другому источнику данных, который включается, например ADS-B или радиолокационные данные. Нужно будет принять во внимание, что можно использовать разные цвета для идентификации источника данных заданного элемента информации о положении для летательного аппарата 10.
Изобретение относится к радиосвязи. Способ для контроля состояния летательного аппарата содержит отправку из модуля вывода в системе контроля летательного аппарата запроса контракта на передачу отчетов в авиационную электронику летательного аппарата. Упомянутый запрос задает критерии отчетов, по которым авиационной электронике летательного аппарата необходимо предоставлять ответный сигнал данных. Контролируют в модуле ввода в системе контроля летательного аппарата принятые ответные сигналы данных, отправленные из авиационной электроники летательного аппарата в систему контроля летательного аппарата. Определяют в процессоре системы контроля летательного аппарата, удовлетворяют ли принятые ответные сигналы данных критериям предупреждения, и формируют предупреждения в модуле предупреждения в системе контроля летательного аппарата на основе упомянутого определения. Технический результат заключается в обеспечении контроля неожиданного поведения летательного аппарата или несоблюдения условий контракта. 6 н. и 22 з.п. ф-лы, 7 ил.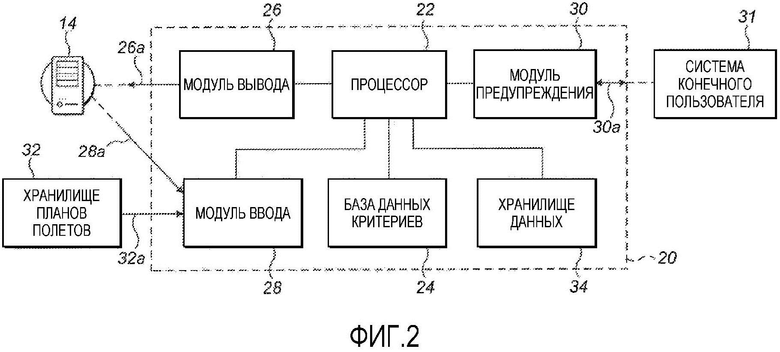
1. Компьютеризированный способ для контроля состояния летательного аппарата, содержащий этапы, на которых:
отправляют из модуля вывода системы контроля летательного аппарата запрос контракта на передачу отчетов в авиационную электронику летательного аппарата, при этом запрос контракта на передачу отчетов задает один или несколько критериев отчетов, по которым авиационной электронике летательного аппарата необходимо предоставлять системе контроля летательного аппарата ответный сигнал данных;
контролируют в модуле ввода системы контроля летательного аппарата принятый ответный сигнал данных, отправленный из авиационной электроники летательного аппарата в систему контроля летательного аппарата;
определяют в процессоре системы контроля летательного аппарата, удовлетворяют ли принятые ответные сигналы данных одному или нескольким критериям предупреждения; и
формируют предупреждение в модуле предупреждения системы контроля летательного аппарата на основе упомянутого определения;
при этом критерии отчетов задают первый интервал, в котором авиационной электронике летательного аппарата необходимо предоставлять ответный сигнал данных, критерии предупреждения задают второй интервал и в котором в модуле предупреждения системы контроля летательного аппарата предупреждение формируется при отсутствии необходимого ответного сигнала данных, принимаемого в течение первого или второго интервала.
2. Компьютеризированный способ по п. 1, в котором критерии отчетов указывают, что необходим неотложный ответный сигнал данных от авиационной электроники летательного аппарата, и в котором предупреждение формируется в модуле предупреждения системы контроля летательного аппарата при отсутствии ответного сигнала данных, принимаемого во втором интервале, заданном критериями предупреждения.
3. Компьютеризированный способ по п. 1 или 2, в котором один или несколько критериев отчетов и один или несколько критериев предупреждения принимаются из базы данных критериев системы контроля летательного аппарата и в котором ответный сигнал данных содержит информацию о местоположении летательного аппарата, соответствующую летательному аппарату.
4. Компьютеризированный способ по любому предшествующему пункту, в котором предупреждение формируется в модуле предупреждения системы контроля летательного аппарата, если в процессоре определяется, что принятый ответный сигнал данных является отчетом об аварии.
5. Компьютеризированный способ по любому предшествующему пункту, в котором предупреждение формируется, если в процессоре системы контроля летательного аппарата определяется, что ответный сигнал данных на запрос контракта на передачу отчетов является сообщением отказа соединения.
6. Компьютеризированный способ по любому предшествующему пункту, в котором запрос контракта на передачу отчетов и соответствующий ответный сигнал данных соответствуют контрактному автоматическому зависимому наблюдению.
7. Компьютеризированный способ по любому предшествующему пункту, в котором предупреждения, которые сформированы в модуле предупреждения системы контроля летательного аппарата, сохраняются в хранилище данных и предоставляются пользователю по запросу пользователя.
8. Компьютеризированный способ по п. 3, дополнительно содержащий этапы, на которых:
принимают в модуле ввода сообщения уведомления средств обслуживания воздушного движения (AFN), соответствующие летательному аппарату;
определяют в процессоре, удовлетворяют ли принятые сообщения AFN одному или нескольким критериям сообщений AFN; и
формируют предупреждение в модуле предупреждения на основе упомянутого определения.
9. Система для контроля состояния летательного аппарата, содержащая:
модуль вывода, сконфигурированный для отправки запроса контракта на передачу отчетов в авиационную электронику летательного аппарата, причем запрос контракта на передачу отчетов задает один или несколько критериев отчетов, по которым авиационной электронике летательного аппарата необходимо предоставлять системе ответный сигнал данных;
модуль ввода, сконфигурированный для приема ответных сигналов данных, отправленных в систему из авиационной электроники летательного аппарата;
процессор, сконфигурированный для определения, удовлетворяют ли принятые ответные сигналы данных одному или нескольким критериям предупреждения; и
модуль предупреждения, сконфигурированный для формирования предупреждения на основе упомянутого определения;
при этом критерии отчетов задают первый интервал, в котором авиационной электронике летательного аппарата необходимо предоставлять ответный сигнал данных, критерии предупреждения задают второй интервал и в которой модуль предупреждения сконфигурирован для формирования предупреждения при отсутствии необходимого ответного сигнала данных, принимаемого в течение первого или второго интервала.
10. Система по п. 9, в которой критерии отчетов указывают, что необходим неотложный ответный сигнал данных от авиационной электроники летательного аппарата, и в которой модуль предупреждения сконфигурирован для формирования предупреждения при отсутствии ответного сигнала данных, принимаемого во втором интервале, заданном критериями предупреждения.
11. Система по п. 9 или 10, в которой один или несколько критериев отчетов и один или несколько критериев предупреждения принимаются из базы данных критериев системы и в которой ответные сигналы данных, принимать которые сконфигурирован модуль ввода, содержат информацию о местоположении летательного аппарата, соответствующую летательному аппарату.
12. Система по любому из п. 9-11, в которой модуль предупреждения сконфигурирован для формирования предупреждения, если процессор определяет, что принятый ответный сигнал данных является отчетом об аварии.
13. Система по любому из п. 9-12, в которой модуль предупреждения дополнительно сконфигурирован для формирования предупреждения, если процессором определяется, что ответный сигнал данных на запрос контракта на передачу отчетов является сообщением отказа соединения.
14. Система по любому из п. 9-13, в которой запросы контрактов на передачу отчетов, отправлять которые сконфигурирован модуль вывода, и соответствующие ответы, принимать которые сконфигурирован модуль ввода, соответствуют контрактному автоматическому зависимому наблюдению.
15. Система по любому из п. 9-14, дополнительно содержащая хранилище данных, в которой процессор дополнительно сконфигурирован для сохранения в хранилище данных предупреждений, которые сформированы, и предоставления пользователю предупреждений, которые сформированы, по запросу пользователя.
16. Система по п. 10, в которой модуль ввода дополнительно сконфигурирован для приема сообщений уведомления средств обслуживания воздушного движения (AFN), соответствующих летательному аппарату; и
в которой модуль предупреждения сконфигурирован для формирования предупреждения, если процессор определяет, что сообщение подтверждения AFN не принято, когда ожидается, на основе информации о местоположении летательного аппарата.
17. Компьютеризированный способ для контроля состояния летательного аппарата, содержащий этапы, на которых:
отправляют из модуля вывода системы контроля летательного аппарата запрос контракта на передачу отчетов в авиационную электронику летательного аппарата, при этом запрос контракта на передачу отчетов задает один или несколько критериев отчетов, по которым авиационной электронике летательного аппарата необходимо предоставлять системе контроля летательного аппарата ответный сигнал данных;
контролируют в модуле ввода системы контроля летательного аппарата принятый ответный сигнал данных, отправленный из авиационной электроники летательного аппарата в систему контроля летательного аппарата;
определяют в процессоре системы контроля летательного аппарата, удовлетворяют ли принятые ответные сигналы данных одному или нескольким критериям предупреждения; и
формируют предупреждение в модуле предупреждения системы контроля летательного аппарата на основе упомянутого определения;
при этом один или несколько критериев отчетов и один или несколько критериев предупреждения принимаются из базы данных критериев системы контроля летательного аппарата и при этом ответный сигнал данных содержит информацию о местоположении летательного аппарата, соответствующую летательному аппарату; и
при этом модуль ввода системы контроля летательного аппарата сконфигурирован для приема данных плана полета и данных ACARS, соответствующих летательному аппарату, и при этом предупреждение дополнительно формируется в модуле предупреждения системы контроля летательного аппарата, если определяется, что принято сообщение изменения фазы полета, соответствующее летательному аппарату, но не приняты данные плана полета, соответствующие летательному аппарату.
18. Компьютеризированный способ п. 17, в котором запрос контракта на передачу отчетов и соответствующий ответный сигнал данных соответствуют контрактному автоматическому зависимому наблюдению.
19. Компьютеризированный способ по п. 17, дополнительно содержащий этап, на котором:
принимают в модуле ввода сообщения уведомления средств обслуживания воздушного движения (AFN), соответствующие летательному аппарату;
определяют в процессоре, удовлетворяют ли принятые сообщения AFN одному или нескольким критериям сообщений AFN; и
формируют предупреждение в модуле предупреждения на основе упомянутого определения.
20. Система для контроля состояния летательного аппарата, содержащая:
модуль вывода, сконфигурированный для отправки запроса контракта на передачу отчетов в авиационную электронику летательного аппарата, причем запрос контракта на передачу отчетов задает один или несколько критериев отчетов, по которым авиационной электронике летательного аппарата необходимо предоставлять системе ответный сигнал данных;
модуль ввода, сконфигурированный для приема ответных сигналов данных, отправленных в систему из авиационной электроники летательного аппарата;
процессор, сконфигурированный для определения, удовлетворяют ли принятые ответные сигналы данных одному или нескольким критериям предупреждения; и
модуль предупреждения, сконфигурированный для формирования предупреждения на основе упомянутого определения;
при этом ответные сигналы данных, принимать которые сконфигурирован модуль ввода, содержат информацию о местоположении летательного аппарата, соответствующую летательному аппарату; и
при этом модуль ввода дополнительно сконфигурирован для приема данных плана полета и данных ACARS, соответствующих летательному аппарату, и при этом модуль предупреждения сконфигурирован для формирования предупреждения, если определяется, что принято сообщение изменения фазы полета, соответствующее летательному аппарату, но не приняты данные плана полета, соответствующие летательному аппарату.
21. Система по п. 20, в которой запросы контрактов на передачу отчетов, отправлять которые сконфигурирован модуль вывода, и соответствующие ответы, принимать которые сконфигурирован модуль ввода, соответствуют контрактному автоматическому зависимому наблюдению.
22. Система по п. 20, в которой модуль ввода дополнительно сконфигурирован для приема сообщений уведомления средств обслуживания воздушного движения (AFN), соответствующих летательному аппарату; и в которой модуль предупреждения сконфигурирован для формирования предупреждения, если процессор определяет, что сообщение подтверждения AFN не принято, когда ожидается, на основе информации о местоположении летательного аппарата.
23. Компьютеризированный способ для контроля состояния летательного аппарата, содержащий этапы, на которых:
отправляют из модуля вывода системы контроля летательного аппарата запрос контракта на передачу отчетов в авиационную электронику летательного аппарата, при этом запрос контракта на передачу отчетов задает один или несколько критериев отчетов, по которым авиационной электронике летательного аппарата необходимо предоставлять системе контроля летательного аппарата ответный сигнал данных;
контролируют в модуле ввода системы контроля летательного аппарата принятый ответный сигнал данных, отправленный из авиационной электроники летательного аппарата в систему контроля летательного аппарата;
принимают в модуле ввода системы контроля летательного аппарата данные плана полета, соответствующие летательному аппарату;
принимают в модуле ввода системы контроля летательного аппарата сообщения связи "диспетчер - пилот" по линии передачи данных (CPDLC), соответствующие летательному аппарату;
определяют в процессоре системы контроля летательного аппарата, удовлетворяют ли принятые ответные сигналы данных одному или нескольким критериям предупреждения; и
формируют предупреждение в модуле предупреждения системы контроля летательного аппарата на основе упомянутого определения;
при этом один или несколько критериев отчетов и один или несколько критериев предупреждения принимаются из базы данных критериев системы контроля летательного аппарата и при этом ответный сигнал данных содержит информацию о местоположении летательного аппарата, соответствующую летательному аппарату; и
причем предупреждение формируется в модуле предупреждения системы контроля летательного аппарата, если определяется, что информация о местоположении летательного аппарата отклоняется вертикально или горизонтально от данных плана полета на заданную величину и отклонение от данных плана полета определено, процессором как несанкционированное в содержимом сообщений CPDLC.
24. Компьютеризированный способ по п. 23, дополнительно содержащий этапы, на которых сохраняют сообщения CPDLC в хранилище данных; причем сообщения CPDLC предоставляются пользователю по запросу пользователя.
25. Компьютеризированный способ п. 23 или 24, в котором запрос контракта на передачу отчетов и соответствующий ответный сигнал данных соответствуют контрактному автоматическому зависимому наблюдению.
26. Система для контроля состояния летательного аппарата, содержащая:
модуль вывода, сконфигурированный для отправки запроса контракта на передачу отчетов в авиационную электронику летательного аппарата, причем запрос контракта на передачу отчетов задает один или несколько критериев отчетов, по которым авиационной электронике летательного аппарата необходимо предоставлять системе ответный сигнал данных;
модуль ввода, сконфигурированный для приема ответных сигналов данных, отправленных в систему из авиационной электроники летательного аппарата, данных плана полета, соответствующих летательному аппарату и сообщений связи "диспетчер - пилот" по линии передачи данных (CPDLC), соответствующих летательному аппарату;
процессор, сконфигурированный для определения, удовлетворяют ли принятые ответные сигналы данных одному или нескольким критериям предупреждения; и
модуль предупреждения, сконфигурированный для формирования предупреждения на основе упомянутого определения;
при этом ответные сигналы данных, принимать которые сконфигурирован модуль ввода, содержат информацию о местоположении летательного аппарата, соответствующую летательному аппарату; и
при этом модуль предупреждения сконфигурирован для формирования предупреждения, если процессор определяет, что информация о местоположении летательного аппарата отклонилась вертикально или горизонтально от данных плана полета на заданную величину и отклонение от данных плана полета определено процессором как несанкционированное в содержимом сообщений CPDLC.
27. Система по п. 26, в которой процессор дополнительно сконфигурирован для сохранения сообщений CPDLC в хранилище данных и предоставления пользователю сообщений CPDLC по запросу пользователя.
28. Система по п. 26 или 27, в которой запросы контрактов на передачу отчетов, отправлять которые сконфигурирован модуль вывода, и соответствующие ответы, принимать которые сконфигурирован модуль ввода, соответствуют контрактному автоматическому зависимому наблюдению.
| СРЕДСТВО ДЛЯ ЛЕЧЕНИЯ ОНКОЛОГИЧЕСКИХ ЗАБОЛЕВАНИЙ ЖЕНСКОЙ ПОЛОВОЙ СФЕРЫ С 5-ФТОРУРАЦИЛОМ И МЕТРОНИДАЗОЛОМ | 2010 |
|
RU2445097C1 |
| WO 2011017812 A1, 17.02.2011 | |||
| US 2013085661 A1, 04.04.2013 | |||
| RU 2013107571 A, 27.08.2014. | |||

