ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к устройству и способу отслеживания положений одного или более летательного аппарата. В частности, настоящее изобретение относится к устройству и способу отслеживания положения определённого летательного аппарата точно и автономно.
УРОВЕНЬ ТЕХНИКИ
Существующие системы отслеживания летательных аппаратов обычно используют данные адресно-отчетной системы авиационной связи (ACARS) в сочетании с радиолокационными данными для отслеживания перемещения летательных аппаратов. Эти данные могут использоваться авиадиспетчерами или в качестве альтернативы обеспечиваться в качестве услуги для эксплуатантов летательных аппаратов.
В системе ACARS каждый летательный аппарат оборудуется приемопередатчиком VHF для обеспечения линии передачи данных между бортовым оборудованием летательного аппарата и наземным оборудованием. Эта линия передачи данных может обеспечиваться посредством прямой передачи от летательного аппарата в наземную станцию, или в качестве альтернативы летательный аппарат может передавать данные на спутник, который затем пересылает данные в спутниковую наземную станцию. Эти передачи принимаются в наземных станциях поставщиком услуг линии передачи данных, который затем маршрутизирует данные авиадиспетчерам или эксплуатантам летательных аппаратов.
Периодичность, с которой определённый летательный аппарат осуществляет передачи данных ACARS, конфигурируется управляющей авиакомпанией и обычно находится в порядке от десяти до двадцати минут. Она в общем определяется, чтобы обеспечивать баланс между приемом актуальных данных и затратами в расчете на сообщение, ассоциированными с передачей данных. В виду этого относительно длительного периода между последовательными передачами сообщений, временная метка для любой определённой передачи ACARS является точной только в пределах минуты и данные положения докладываются в пределах точности трех десятичных разрядов. Это означает, что между последовательными передачами ACARS летательным аппаратом могут покрываться значительные расстояния, что может в свою очередь вести к неопределенности в оцененном положении и траектории летательного аппарата.
Кроме того, если летательный аппарат вынужден выполнять полет по кругу в определённой области воздушного пространства, например, в зоне ожидания аэропорта, это не будет видно непосредственно из данных ACARS, так как летательный аппарат вероятней всего выполнит полный круг ко времени, когда выполняется последующая передача ACARS. Это может вести к тому, что это отслеживание данных ACARS будет ненадежным в отношении того, являются ли эти передачи данных ошибочными или действительно ли летательный аппарат остался в определённой области воздушного пространства между последовательными передачами ACARS.
Увеличение частоты (то есть уменьшение периода между последовательными передачами) передачи сообщений ACARS будет обеспечивать более актуальный набор данных положения; однако, так как эта система ACARS является системой линии передачи цифровых данных один в один, это будет накладывать большое бремя на сеть ACARS. Это будет перегружать сеть, что будет затем уменьшать надежность и точность сети. Соответственно должно быть найдено другое решение этой проблемы.
Одним альтернативным источником данных для информации положения летательного аппарата является использование первичных и/или вторичных радиолокационных установок. Первичный радар является независимым способом отслеживания местоположения определённого целевого летательного аппарата и просто использует хорошо известный принцип излучения радиопередачи большой мощности и затем обнаружения отраженных передач от какого-либо объекта, который находится в поле обзора радара.
Во вторичной радиолокации целевой летательный аппарат должен быть оборудован транспондером таким образом, чтобы летательный аппарат мог идентифицировать себя в ответ на сигнал опроса, излучаемый радиолокационной установкой, с использованием кода, который был выдан для этого летательного аппарата авиадиспетчером. Радиолокационные системы имеют преимущество в том, что положение летательного аппарата может отслеживаться с большей частотой, чтобы более точно отслеживать траекторию полета определённого летательного аппарата; однако каждая радиолокационная установка требует очень большой величины мощности для передачи радиолокационного импульса на расстояние действия радиолокационной системы. Кроме того, радиолокационные системы являются очень дорогостоящими в отношении установки и обслуживания, особенно для больших областей.
Заявители настоящей поняли, что необходима более точная система для отслеживания положений летательного аппарата, которая может осуществляться с использованием устройства сравнительно низкой стоимости.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Согласно первому аспекту изобретения предложено устройство для отслеживания положений одного или более летательного аппарата. Устройство содержит первое приёмное устройство, выполненное с возможностью принимать первую информацию положения летательного аппарата по линии передачи цифровых данных от первого радиочастотного источника, расположенного на борту летательного аппарата, с первой периодичностью посредством одной или более наземных станций, и второе приёмное устройство, выполненное с возможностью принимать вторую информацию положения летательного аппарата, передаваемую широковещательным способом от второго радиочастотного источника, расположенного на борту летательного аппарата, со второй периодичностью, посредством одной или более наземных станций.
Устройство дополнительно содержит третье приёмное устройство, выполненное с возможностью принимать электронные географические картографические данные, и буфер, выполненный с возможностью принимать первую и вторую информацию положения летательного аппарата от первого и второго приёмных устройств соответственно. Устройство дополнительно содержит процессор, выполненный с возможностью принимать и фильтровать буферизованную первую и вторую информацию положения летательного аппарата. Процессор дополнительно выполнен с возможностью сглаживать фильтрованную информацию положения летательного аппарата и выводить сглаженную информацию положения летательного аппарата таким образом, что она может накладываться на электронные географические картографические данные. Процессор выполнен с возможностью фильтровать первую и вторую информацию положения летательного аппарата таким образом, что количество данных информации положения, сглаженных для определённого летательного аппарата, находится в пределах определённого предела для определённого периода времени.
Устройство предпочтительно обеспечивает возможность множества источников информации относительно положения определённого летательного аппарата, которые имеют различную точность, частоту и качество, для комбинирования и консолидирования в согласованный вывод, который доставляет высокоточную и динамическую агрегированную информацию положения летательного аппарата с возможностью отслеживать отклонения полета по существу в реальном времени. Кроме того, положение летательного аппарата по отношению к метеорологическим условиям или другим конкретным областям или воздушному пространству может отслеживаться с более большой степенью достоверности, чтобы поддерживать процессы принятия решений релевантных эксплуатантов летательных аппаратов посредством обеспечения, увеличенной видимости местоположения летательного аппарата в реальном времени. Приёмные устройства могут быть реализованы аппаратными средствами или, в качестве альтернативны, могут реализованы программными средствами.
При необходимости процессор может быть выполнен с возможностью фильтровать информацию положения летательного аппарата на основании относительной позиционной точности и относительной временной точности соответствующих источников, от которых принята информация положения летательного аппарата. В этом варианте осуществления, процессор предпочтительно обеспечивает возможность устройству только сглаживать наиболее точную информацию, которая принята от соответствующих источников в пределах определённого периода времени.
Сглаживание информации положения летательного аппарата может при необходимости содержать удаление ошибочных точек данных или точек данных более низкого качества или может содержать усреднение конкретных пар или групп точек данных. Это обеспечивает возможность разрешения любых конфликтов или ошибок в множестве наборов данных таким образом, что может выводиться согласованное изменение положения летательного аппарата.
В некоторых вариантах осуществления изобретения вторая периодичность является более короткой, чем первая периодичность, то есть вторая информация положения летательного аппарата может передаваться широковещательным способом с более высокой частотой передачи, чем первая информация положения летательного аппарата. В одном примере, первая информация положения летательного аппарата принимается, в первом приемнике, от приемопередатчика адресно-отчетной системы авиационной связи. В дополнительном примере, вторая информация положения летательного аппарата принимается, во втором приемнике, от передатчика автоматического зависимого наблюдения-вещания.
Первая и вторая информация положения летательного аппарата может приниматься посредством одной или более из наземной станции VHF, наземной станции HF или спутниковой наземной станции. Эти наземные станции позволяют принимать передачи от летательного аппарата непосредственно на уровне поверхности земли или альтернативно посредством одного или более спутников.
Предпочтительно устройство может дополнительно содержать четвертый приемник, выполненный с возможностью принимать радиолокационные данные положения летательного аппарата, при этом процессор выполнен с возможностью фильтровать радиолокационные данные положения летательного аппарата в комбинации с первой и второй информацией положения летательного аппарата таким образом, что количество сглаженных данных информации положения находится в пределах определённого предела для определённого периода времени.
В некоторых вариантах осуществления изобретения, устройство дополнительно содержит пятый приемник, выполненный с возможностью принимать метеорологические данные, при этом процессор дополнительно выполнен с возможностью выводить метеорологические данные таким образом, что они могут накладываться на электронные географические картографические данные. Это предпочтительно обеспечивает возможность пользователям точно отслеживать положение летательного аппарата по отношению к метеорологическим условиям, чтобы поддерживать релевантного эксплуатанта летательного аппарата в его процессах принятия решений. Например, эксплуатант летательного аппарата может быть способным определять, что определённый летательный аппарат должен будет отклониться от его запланированного маршрута, таким образом, обеспечивая возможность эксплуатанту летательного аппарата учитывать любую критику в отношении эффектов, которые может иметь это отклонение, заранее во времени.
В другом предпочтительном варианте осуществления изобретения устройство может дополнительно содержать шестой приемник, выполненный с возможностью принимать данные плана полета, соответствующие летательному аппарату, при этом процессор выполнен с возможностью выводить данные плана полета таким образом, что они могут накладываться на электронные географические картографические данные и сглаженную информацию положения летательного аппарата. Это улучшает видимость любых отклонений, которые летательный аппарат может делать, от его запланированного маршрута, таким образом, обеспечивая возможность быстро идентифицировать эти отклонения и определять любое результирующее изменение в ожидаемом времени прибытия летательного аппарата в его пункт назначения.
Предпочтительно буфер может быть кольцевым буфером и фильтр процессора может содержать фильтр дискретизации для фильтрации и сортировки информации положения летательного аппарата для включения в уменьшенный набор информации положения летательного аппарата. Это обеспечивает возможность интерпретировать и согласовывать обнаруженную и неполную информацию положения летательного аппарата, принятую от множества приемников до того, как она агрегируется. Фильтр дискретизации при необходимости основан на критериях времени и точности.
В дополнительном варианте осуществления изобретения процессор может быть выполнен с возможностью идентифицировать данные положения летательного аппарата, относящиеся к определённому летательному аппарату, посредством механизма сопоставления данных.
Предпочтительно устройство может дополнительно содержать сохранение сглаженной информации положения летательного аппарата в хранилище данных, для последующего анализа. Этот анализ может обеспечивать возможность эксплуатантам летательных аппаратов определять любые неэффективности, которые произошли в их прошлых операциях таким образом, что они могут учитываться и использоваться для оптимизации будущих операций.
В дополнительном варианте осуществления процессор может быть выполнен с возможностью выводить экстраполированную информацию положения летательного аппарата таким образом, что она может накладываться на электронные географические картографические данные в случае, когда никакая информация положения летательного аппарата не принимается в процессоре для определённого летательного аппарата в пределах определённого периода времени. Это обеспечивает возможность, например, точно отслеживать оцененное влияние текущих или прогнозируемых метеорологических условий или других конкретных областей или воздушного пространства, даже когда информация положения летательного аппарата не была принята в течение короткого времени, чтобы поддерживать процессы принятия решений релевантных эксплуатантов летательных аппаратов.
В еще одном варианте осуществления процессор может быть выполнен с возможностью выводить информацию положения летательного аппарата ACARS таким образом, что она может накладываться на электронные географические картографические данные помимо сглаженной информацией положения летательного аппарата в случае, когда информация положения летательного аппарата ACARS не образует часть сглаженной информации положения летательного аппарата. Таким образом, информация положения ACARS может отображаться на картографических данных, даже если она была отфильтрована посредством процессора, вследствие доступности более точной информации положения летательного аппарата.
Согласно второму аспекту изобретения, предложен компьютеризированный способ отслеживания положений одного или более летательных аппаратов. Компьютеризированный способ содержит прием в первом приёмном устройстве первой информации положения летательного аппарата, по линии передачи цифровых данных от первого радиочастотного источника, расположенного на борту летательного аппарата, с первой периодичностью посредством одной или более наземных станций; прием во втором приёмном устройстве, второй информации положения летательного аппарата, передаваемой широковещательным способом от второго радиочастотного источника, расположенного на борту летательного аппарата, со второй периодичностью посредством одной или более наземных станций; и прием в третьем приёмном устройстве электронных географических картографических данных.
Компьютеризированный способ дополнительно содержит прием в буфере принятой первой и второй информации положения летательного аппарата; обработку в процессоре буферизованной первой и второй информации положения летательного аппарата, чтобы фильтровать первую и вторую информацию положения летательного аппарата, обработку в процессоре фильтрованной информации положения летательного аппарата, чтобы формировать сглаженную информацию положения летательного аппарата; и вывод из процессора сглаженной информации положения летательного аппарата таким образом, что она может накладываться на электронные географические картографические данные. В компьютеризированном способе, процессор фильтрует первую и вторую информацию положения летательного аппарата таким образом, что количество данных информации положения, сглаженных для определённого летательного аппарата, находится в пределах определённого предела для определённого периода времени. Это предпочтительно обеспечивает возможность пользователям, таким как эксплуатанты летательных аппаратов, осуществлять доступ к точному объединению множества источников информации положения, относящейся к определённому летательному аппарату, и представлять эту информацию визуально в дружественном к пользователю формате над электронными картографическими данными.
Фильтрация информации положения летательного аппарата может быть основана на относительной позиционной точности и относительной временной точности соответствующих источников, от которых принята информация положения летательного аппарата. В этом варианте осуществления, процессор предпочтительно обеспечивает возможность устройству только сглаживать наиболее точную информацию, которая принята от соответствующих источников в пределах определённого периода времени.
Сглаживание информации положения летательного аппарата может при необходимости содержать удаление ошибочных точек данных или точек данных более низкого качества или может содержать усреднение конкретных пар или групп точек данных. Это обеспечивает возможность разрешения любых конфликтов или ошибок в множестве наборов данных таким образом, что может выводиться согласованное изменение положения летательного аппарата.
В некоторых вариантах осуществления изобретения вторая периодичность является более короткой, чем первая периодичность, то есть вторая информация положения летательного аппарата может передаваться широковещательным способом с более высокой частотой передачи, чем первая информация положения летательного аппарата. В одном примере, первая информация положения летательного аппарата принимается, в первом приемнике, от приемопередатчика адресно-отчетной системы авиационной связи (ACARS) и первая информация положения летательного аппарата является информацией положения летательного аппарата ACARS. В дополнительном примере вторая информация положения летательного аппарата принимается, во втором приемнике, от передатчика автоматического зависимого наблюдения-вещания.
Первая и вторая информация положения летательного аппарата может приниматься посредством одной или более из наземной станции VHF, наземной станции HF или спутниковой наземной станции. Эти наземные станции позволяют принимать передачи от летательного аппарата непосредственно на уровне поверхности земли или альтернативно посредством одного или более спутников.
Предпочтительно компьютеризированный способ может дополнительно содержать прием в четвертом приемнике радиолокационных данных положения летательного аппарата, и фильтрацию радиолокационных данных положения летательного аппарата в комбинации с первой и второй информацией положения летательного аппарата таким образом, что количество данных информации положения, сглаженных в процессоре, находится в пределах определённого предела для определённого периода времени.
В некоторых вариантах осуществления изобретения, компьютеризированный способ дополнительно содержит прием, в пятом приемнике, метеорологических данных и затем вывод, из процессора, метеорологических данных таким образом, что они могут накладываться на электронные географические картографические данные. Это предпочтительно обеспечивает возможность пользователям точно отслеживать положение летательного аппарата по отношению к метеорологическим условиям, чтобы поддерживать релевантного эксплуатанта летательного аппарата в его процессах принятия решений. Например, эксплуатант летательного аппарата может быть способным определять, что определённый летательный аппарат должен будет отклониться от его запланированного маршрута, таким образом позволяя эксплуатанту летательного аппарата учитывать любую критику в отношении эффектов, которые может иметь это отклонение, заранее во времени.
В другом предпочтительном варианте осуществления изобретения компьютеризированный способ может содержать прием, в шестом приемнике, данных плана полета, соответствующих летательному аппарату, и вывод, из процессора, данных плана полета таким образом, что они могут накладываться на электронные географические картографические данные и сглаженную информацию положения летательного аппарата. Это улучшает видимость любых отклонений, которые летательный аппарат может делать, от его запланированного маршрута, таким образом, обеспечивая возможность быстро идентифицировать эти отклонения и определять любое результирующее изменение в ожидаемом времени прибытия летательного аппарата в его пункт назначения.
Предпочтительно, буфер может быть кольцевым буфером и фильтр процессора может содержать фильтр дискретизации, чтобы фильтровать и сортировать информацию положения летательного аппарата для включения в уменьшенный набор информации положения летательного аппарата. Это обеспечивает возможность интерпретировать и согласовывать обнаруженную и неполную информацию положения летательного аппарата, принятую от множества приемников до того, как она агрегируется. Фильтр дискретизации при необходимости основан на критериях времени и точности.
В дополнительном варианте осуществления изобретения способ может дополнительно содержать идентификацию, в процессоре, данных положения летательного аппарата, относящихся к определённому летательному аппарату, посредством механизма сопоставления данных.
Предпочтительно, компьютеризированный способ может содержать сохранение сглаженной информации положения летательного аппарата в хранилище данных, для последующего анализа. Этот анализ может обеспечивать возможность эксплуатантам летательных аппаратов определять любые неэффективности, которые произошли в их прошлых операциях таким образом, что они могут учитываться и использоваться для оптимизации будущих операций.
В дополнительном варианте осуществления, компьютеризированный способ может содержать этап вывода экстраполированной информации положения летательного аппарата таким образом, что она может накладываться на электронные географические картографические данные в случае, когда никакая информация положения летательного аппарата не принимается в процессоре для определённого летательного аппарата в пределах определённого периода времени. Это обеспечивает возможность, например, точно отслеживать оцененное влияние текущих или прогнозируемых метеорологических условий или других конкретных областей или воздушного пространства, даже когда информация положения летательного аппарата не была принята в течение короткого времени, чтобы поддерживать процессы принятия решений релевантных эксплуатантов летательных аппаратов.
В еще одном варианте осуществления, компьютеризированный способ может включать в себя вывод информации положения летательного аппарата ACARS таким образом, что она может накладываться на электронные географические картографические данные помимо сглаженной информации положения летательного аппарата в случае, когда информация положения летательного аппарата ACARS не образует часть сглаженной информации положения летательного аппарата. Таким образом, информация положения ACARS может отображаться на картографических данных, даже если она была отфильтрована посредством процессоров вследствие доступности более точной информации положения летательного аппарата.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Теперь будут описаны варианты осуществления изобретения, только в качестве примера, и со ссылкой на сопровождающие чертежи, на которых:
Фиг. 1 является схематическим представлением устройства согласно одному варианту осуществления изобретения, взаимодействующего с источниками данных;
Фиг. 2 является схематическим представлением устройства согласно одному варианту осуществления изобретения;
Фиг. 3 является снимком экрана географических картографических данных, наложенных вместе с планом полета и графиком сглаженной информации положения летательного аппарата для определённого летательного аппарата;
Фиг. 4 - это блок-схема, показывающая основные этапы, выполняемые посредством одного варианта осуществления изобретения;
Фиг. 5a и 5b образуют блок-схему, показывающую этапы, выполняемые посредством другого варианта осуществления изобретения;
Фиг. 6 является снимком экрана географических картографических данных, наложенных вместе с метеорологическими данными в дополнение к плану полета и графику сглаженной информации положения летательного аппарата для определённого летательного аппарата;
Фиг. 7a по 7c являются последовательностями снимков экрана, показывающими изменение во времени предсказанных метеорологических данных, скомбинированных с оцененным положением полета, наложенным на географические картографические данные; и
Фиг. 8a по 8c являются последовательностями снимков экрана, показывающими изменение во времени наблюдаемых метеорологических данных, скомбинированных с наблюдаемым положением полета, наложенным на географические картографические данные.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Все большее количество летательных аппаратов теперь оснащается оборудованием автоматического зависимого наблюдения-вещания (ADS-B), в силу чего каждый летательный аппарат использует свою глобальную систему позиционирования (GPS), чтобы определять свое положение, и затем эта информация положения передается широковещательным способом вместе с дополнительной информацией, такой как ID летательного аппарата или код транспондера, позывной, высота, курс и скорость, с использованием радиочастотного приемопередатчика с относительно регулярным периодом, например, приблизительно один раз каждую секунду.
В соответствии с этой увеличенной частотой, передача широковещательным образом данных ADS-B летательным аппаратом также является более точной. В ADS-B, данные положения докладываются в пределах точности пяти десятичных разрядов и соответствующая временная метка является точной в пределах одной секунды. Эта увеличенная точность обеспечивает возможность, чтобы данные ADS-B были более высокого качества, чем даже радиолокационные данные местоположения. Кроме того, системы ADS-B могут осуществляться над более большими областями за долю стоимости и обслуживания, требуемых для радиолокационных установок.
Система ADS-B была исходно спроектирована, чтобы обеспечивать дополнительный ввод для Систем предупреждения воздушного столкновения (TCAS) летательных аппаратов с соседним летательным аппаратом, таким образом каждый летательный аппарат может осуществлять широковещательную передачу своей идентификационной информации, местоположения и курса в другой летательный аппарат в области передач. Однако было обнаружено, что эти данные ADS-B могут использоваться наземными системами для улучшенного отслеживания летательных аппаратов, при условии, что приемник может располагаться в пределах области летательного аппарата.
Согласно первому аспекту изобретения, и со ссылкой на фиг. 1, данные ADS-B могут использоваться, чтобы отслеживать летательный аппарат 12 над большими областями воздушного пространства посредством обеспечения сети приемников 10. Кроме того, покрытие воздушного пространства такого устройства может расширяться просто посредством обеспечения дополнительных приемников, или наземных станций 10, и соединения этих наземных станций с существующими наземными станциями с использованием сети связи.
Сеть связи может быть любой публичной, частной, проводной или беспроводной сетью. Сеть связи может включать в себя одну или более из локальной сети (LAN), глобальной сети (WAN) 14, сети Интернет, мобильной телефонной системы связи, или спутниковой системы связи. Сеть связи может содержать любую подходящую инфраструктуру, включая сюда медные кабели, оптические кабели или волокна, маршрутизаторы, межсетевые экраны, коммутаторы, шлюзовые компьютеры и граничные серверы.
Эти наземные станции 10 могут содержать наземные станции VHF или наземные станции HF, которые работают на радиочастотных диапазонах VHF или HF соответственно. Признак «наземная станция» используется здесь, чтобы указывать на любую станцию-приемник на уровне поверхности земли. Во избежание сомнения, эти наземные станции могут включать в себя приемники, расположенные на платформах в океане, таких как нефтяные вышки, или плавающих суднах, таких как танкеры или авианосцы. Кроме того, могут использоваться отдельные наземные станции, чтобы принимать сообщения ACARS и данные ADS-B, или альтернативно соответствующие приемники могут комбинироваться в одиночную наземную станцию. Данные от каждой наземной станции затем могут собираться сетью 14 и комбинироваться, чтобы формировать консолидированную базу данных из данных ADS-B, которые могут использоваться для отслеживания летательного аппарата 12 в пределах дальности действия сети наземных станций 10. Покрытие воздушного пространства каждой наземной станции имеет форму конуса линии видимости с областью действия приблизительно 200 морских миль.
Местоположение наземных станций 10 обычно не является важным, так как все из необходимых данных положения передаются оборудованным ADS-B летательным аппаратом 12; однако, в некоторых устройствах, эти передачи могут использоваться как часть системы мультилатерации, чтобы триангулировать положение летательного аппарата 12. Это может быть предпочтительным, например, если предполагается, что имеется ошибка в позиционных данных, излученных летательным аппаратом 12.
В настоящем устройстве летательный аппарат 12 осуществляет широковещательную передачу данных ADS-B по существу непрерывно, то есть с коротким периодом, таким как 1 секунда таким образом, что поток информации о положения летательного аппарата по существу в реальном времени может приниматься блоками приемников данных ADS-B, известными как наземные станции 10. Летательный аппарат 12 также передает сообщения ACARS, некоторые из которых могут содержать информацию положения летательного аппарата, которые принимаются наземными станциями 16 ACARS обычным образом и пересылаются посредством системы линии передачи цифровых данных. Эти сообщения ACARS передаются со сравнительно длительным периодом, как, например, в порядке 10 минут. Сигнал для сообщений ACARS может быть непосредственно от летательного аппарата в наземную станцию 16, или альтернативно сообщение может маршрутизироваться через спутниковую линию 18 связи (в этом случае наземная станция будет спутниковой наземной станцией 20).
Данные ADS-B и сообщения ACARS, содержащие информацию положения, затем собираются централизованным образом устройством 22. Устройство 22 может дополнительно принимать радиолокационную информацию положения летательного аппарата от сервера 24 радиолокационных данных и/или метеорологические данные от сервера 26 метеорологических данных, как будет описываться ниже.
Так как данные ADS-B и сообщения ACARS приходят от множества источников различной частоты и качества, является вероятным, что будут иметься нерегулярности и конфликты в данных положения, которые, если они просто отображаются без дополнительной обработки, могут давать зигзагообразную траекторию, когда летательный аппарат 12 фактически перемещается по прямой линии, или, в качестве альтернативы, могут приводить к тому, что докладывается положение летательного аппарата 12, которое переместилось на сотни миль от курса, когда летательный аппарат 12 фактически по-прежнему перемещается согласно ожидаемому плану полета.
Эти конфликты будут вызывать проблемы целостности по отношению к точности и аккуратности агрегированного положения и траектории определённого летательного аппарата. Кроме того, будут иметься серьезные проблемы с производительностью в задержке отображения, если приложение пытается отобразить все точки данных. Эта проблема с производительностью осложняется в ситуации, когда для доступа к данным используются Интернет-браузеры, так как браузеры изначально не спроектированы для отображения таких больших наборов данных в реальном времени.
Устройство 22 может принимать информацию положения летательного аппарата с частотой один раз в секунду в расчете на рейс для 10,000 рейсов одновременно. Этот объем данных является просто слишком большим для того, чтобы Интернет-браузер обрабатывал его в реальном времени без аварийного отказа. Соответственно, желательно регулировать объем данных для формирования уменьшенного набора данных, при поддержании наивысшей возможной степени точности. Это обеспечивает возможность приема большого объема данных без перегрузки устройства 22 или какой-либо системы для отображения данных, выводимых из устройства 22.
Чтобы решить эту проблему, обращаясь к фиг. 2, устройство 22 может принимать сообщения ACARS, содержащие информацию положения летательного аппарата, от летательного аппарата 12 в первом приемнике 28 и принимать информацию положения летательного аппарата ADS-B от летательного аппарата 12 во втором приемнике 30. Кроме того, картографические данные могут приниматься в третьем приемнике 32 для построения электронной географической карты, включающей в себя географическую область, в которой эксплуатируется определённый летательный аппарат 12.
Комбинированная информация положения, принятая на первом 28 и втором 30 входах, может затем до обработки приниматься в буфере 33. Чтобы исправить проблемы целостности данных, которые возникают из асинхронной природы поступающих данных, на первом этапе обработки реализуется механизм сопоставления данных, содержащий сложные алгоритмы, чтобы однозначно идентифицировать определённый летательный аппарат посредством комбинирования частичных данных из множества наборов данных. Например, один набор данных может указывать на летательный аппарат посредством его бортового номера, тогда как другой набор данных может указывать на тот же летательный аппарат посредством его текущего номера рейса. Если эти данные не соответствуют и не консолидированы, то устройство будет пытаться отобразить два разных летательных аппарата, когда они фактически представляют собой один и тот же летательный аппарат.
Механизм сопоставления данных основан на большом дереве принятия решений, которое принимает многообразную информацию положения, которая поступает асинхронно, в качестве ввода, и затем сравнивает, упорядочивает и назначает приоритеты информации положения, чтобы устранить противоречия и ложно-положительные результаты.
Например, данные ADS-B и радиолокационные данные обычно идентифицируют летательный аппарат посредством позывного по классификации Международной организации гражданской авиации (ICAO), тогда как данные ACARS обычно используют идентификатор рейса по классификации Международной ассоциации воздушного транспорта (IATA). Соответственно, в некоторых вариантах осуществления создается динамическая таблица, сохраняющая соотношение между позывными ICAO и идентификаторами рейса IATA. Это соотношение может определяться на основании элементов данных, которые указывают как позывной, так и идентификатор рейса для определённого рейса, или, в качестве альтернативы, оно может определяться посредством идентификации промежуточного элемента данных, такого как регистрационный номер летательного аппарата, который может отдельно связываться с позывным и идентификатором рейса.
Принимаемые данные также могут задерживаться вследствие проблем сетевого покрытия, что может вести к тому, что некоторое количество сообщений информации положения летательного аппарата принимается в большом объеме в одно и то же время. Сообщения информации положения летательного аппарата включают в себя данные временных меток и, таким образом, эти сообщения предпочтительно располагаются в их должном временном порядке до того, как данные выводятся посредством интерфейса 36 вывода системы 22.
Однако определённый летательный аппарат может приземляться и впоследствии взлетать снова до того, как летательный аппарат входит в сетевое покрытие, в этом случае летательный аппарат будет иметь принятую новую идентификацию, чтобы представлять новый рейс. Соответственно, объем сообщений может включать в себя сообщения, которые относятся к предыдущему рейсу. Если процессор 34 определяет, что информация положения летательного аппарата не относится к текущей идентификации рейса, или не является иным способом возможным расположить сообщения в корректном порядке, то эта информация положения летательного аппарата предпочтительно отбрасывается.
Дополнительным примером является ситуация, в которой летательный аппарат влетает в зону покрытия данных ADS-B таким образом, что система 22 начинает принимать ADS-B на полпути полета летательного аппарата. В этой ситуации, система 22 будет уже иметь принятой информацию положения летательного аппарата относительно летательного аппарата из другого источника, например, данных ACARS, и будет предпочтительным определять, соответствуют ли новые данные ADS-B новому летательному аппарату, подлежащему отображению, или, в качестве альтернативы, соответствуют ли они существующему летательному аппарату. Из результата этого определения, новые данные могут объединяться и согласовываться с существующими данными.
Одним способом определения того, соответствуют ли новые данные существующим обеспеченным данным летательного аппарата, будет определение позиционного расстояния между парой точек данных информации положения летательного аппарата из соответствующих источников данных, которые соответствуют положениям в пределах определённого кадра времени, и дополнительного определения того, будет ли возможным для одного и того же летательного аппарата покрыть определенное расстояние в этом промежутке времени. Это может использоваться как смысловая проверка, чтобы верифицировать, что источники данных, использующие разные средства для идентификации определённого летательного аппарата, действительно соответствуют одному и тому же летательному аппарату, нежели другому летательному аппарату, который используется, чтобы заменять летательный аппарат, который исходно предполагался лететь этим маршрутом, например, вследствие задержек.
Различные источники данных также могут идентифицировать «время взлета», когда летательный аппарат взлетает, и «время посадки», когда летательный аппарат приземляется. Может иметься различие в несколько минут между этими соответствующими временами и соответственно процессор 34 должен определять то, какому из этих источников должен назначаться приоритет, на основании относительной точности источников данных.
Процессор 34 затем может переходить к фильтрации и сглаживанию данных, чтобы получить уменьшенный набор данных. Буфер 33 может быть кольцевым буфером и фильтрация может включать в себя использование фильтра дискретизации, который осуществляет дискретизацию на основании критериев времени и точности. Например, только верхние 4 наиболее точные точки данных, принятые в пределах периода одной минуты, могут сглаживаться и отображаться на электронных географических картографических данных. В качестве альтернативы, фильтрация может выбирать только наиболее точную точку данных, принятую в пределах последней минуты.
Как описано выше, данные ADS-B передаются широковещательным способом с позиционной точностью пяти десятичных разрядов и временной точностью 1 секунда; соответственно данные ADS-B будут иметь предпочтение над данными ACARS, которые имеют позиционную точность трех десятичных разрядов и временную точность 1 минута, при фильтрации информации положения летательного аппарата, принятой в пределах определённого периода времени, чтобы обеспечивать, что полное количество точек данных в этом периоде времени не превосходит предела.
Обработка сглаживания может включать в себя усреднение информации положения между фильтрованными точками данных. Эти данные сглаженной информации положения летательного аппарата затем могут выводиться процессором 34 в интерфейс 36 вывода и представляться как слой, наложенный на электронные географические картографические данные на устройстве отображения.
Процессор 34 может содержать одно или более устройств обработки специального назначения, таких как специализированная интегральная схема (ASIC), программируемая пользователем вентильная матрица (FPGA), цифровой сигнальный процессор (DSP), сетевой процессор, или другие аналогичные устройства. Процессор 34 выполнен с возможностью выполнять операции и способы, раскрытые ниже. Эти операции могут выполняться посредством одиночного процессора или, альтернативно, могут выполняться посредством некоторого количества процессоров, соединенных вместе.
В случае, когда никакая информация положения летательного аппарата не принимается для определённого летательного аппарата от какого-либо из источников информации положения в пределах определённого периода времени, положение летательного аппарата может оцениваться посредством экстраполяции предыдущих скорости и траектории полета летательного аппарата. Это оцененное положение может отображаться на электронных географических картографических данных и также может помечаться некоторым способом, чтобы обозначить, что оно является лишь оцененным положением летательного аппарата, а не фактическим принятым положением летательного аппарата.
В случае, когда никакая информация положения летательного аппарата ACARS не отображается на электронных географических картографических данных для определённого периода времени (так как принятая информация положения летательного аппарата ACARS была отфильтрована в предпочтение более точной информации положения летательного аппарата) процессор может быть выполнен с возможностью отображения точки данных ACARS в дополнение к точкам данных, которые поддерживаются в фильтрованном списке. Эта дополнительная информация положения может включаться туда для пользы конечного пользователя.
Когда точка данных ACARS отображается в дополнение к точкам данных, которые поддерживаются в фильтрованном списке, точка данных ACARS предпочтительно не сглаживается по отношению к фильтрованному списку точек данных. Вместо этого она просто отображается помимо сглаженной информации положения летательного аппарата, если точка данных ACARS не находится на кривой полета сглаженной информации положения летательного аппарата.
Таким образом, устройство 22 комбинирует и обрабатывает различные наборы данных, чтобы обеспечивать пользователей усовершенствованной возможностью наблюдать и точно отслеживать один или более летательный аппарат 12 с визуальным представлением, которое накладывается на географическую карту для легкости использования. Устройство 22 обеспечивает наземный личный состав авиакомпании более большой видимостью текущего состояния летательного аппарата 12 и обеспечивает возможность любого прерывания в расписании полетов, например, прерывание вследствие ожидания или изменения маршрута летательного аппарата, для идентификации быстрым и централизованным образом.
Дополнительная информация положения летательного аппарата также может комбинироваться с агрегированной информацией положения летательного аппарата; например, радиолокационные данные положения летательного аппарата или данные траектории 4-D Евроконтроля могут собираться в четвертом приемнике 38 и включаться в агрегированные данные положения летательного аппарата, которые фильтруются, обрабатываются и сглаживаются посредством процессора 34, чтобы формировать данные сглаженной информации положения летательного аппарата.
В дополнительных примерах, дополнительные наборы данных могут представляться как дополнительные слои, подлежащие наложению на те же электронные географические картографические данные, что и информация положения летательного аппарата. Эти наборы данных могут содержать метеорологические данные, принятые в пятом приемнике 40, или данные плана полета, соответствующие летательному аппарату 12, которые принимаются в шестом приемнике 42, и также могут периодически обновляться.
Кроме того, отслеживаемая информация положения летательного аппарата может собираться и сохраняться как исторические данные в хранилище 44 данных для будущего анализа, чтобы оценивать и улучшать операционную эффективность летательных аппаратов.
Со ссылкой на фиг. 3, иллюстративные электронные географические картографические данные изображены, наложенными вместе с данными 46 плана полета, соответствующими летательному аппарату 12, также как информацией 48 положения летательного аппарата реального времени. Как можно видеть из информации положения, отображенной на фиг. 3, информация положения летательного аппарата ACARS (показанная как черные квадраты) является значительно менее регулярной, чем информация положения летательного аппарата ADS-B (показанная как белые квадраты). Промежуточные пункты маршрута плана полета показаны как белые круги.
Информация положения летательного аппарата может сохраняться временно в выходном буфере или хранилище данных, чтобы обеспечивать возможность записи фактической траектории полета летательного аппарата, подлежащей выводу посредством устройства. Она может просматриваться и при необходимости сравниваться с исходным планом полета. Кроме того, эти данные могут сохраняться в постоянном хранилище данных, чтобы делать информацию положения летательного аппарата доступной для дополнительного анализа в более позднее время. Этот анализ может обеспечивать возможность эксплуатантам летательных аппаратов определять любые неэффективности, которые произошли в их прошлых операциях таким образом, что они могут учитываться и использоваться для оптимизации будущих операций.
Конечный пользователь будет предпочтительно способным изменять масштаб и осуществлять панорамирование вокруг географических картографических данных в реальном времени, что означает динамическое определение того, какие поднаборы объектов (например, летательный аппарат и аэропорты) являются видимыми и, в наихудшем случае, отображение всех объектов на экране одновременно. Кроме того, чтобы быть способными отображать и обновлять громадные количества как динамических, так и статических объектов в окне Интернет-браузера, могут осуществляться механизмы (такие как алгоритмы), чтобы управлять динамическими данными и избегать того, чтобы браузеры извлекали данные, которые не изменились с момента последней транзакции. Это может достигаться посредством только добавления данных летательного аппарата в браузеры для обновления, если данные летательного аппарата изменились с момента последнего обновления.
Для статических объектов (таких как данные местоположения аэропорта, районы полетной информации или области покрытия), пространство может разделяться на некоторое количество мозаичных элементов и объекты разделяются в сервере мозаичных элементов для отображения. Это обеспечивает возможность группировать статические объекты в виде одиночного объекта мозаичного элемента, который может загружаться и будет оставаться действительным в течение поддерживаемого периода времени, так как информация относительно этих объектов редко изменяется. Одна проблема состоит в том, что географические картографические данные могут просматриваться с разными уровнями масштабирования и соответственно количество мозаичных элементов по всем уровням масштабирования добавляется экспоненциально. Таким образом, количество мозаичных элементов, над которыми осуществляется управление, предпочтительно уменьшается посредством управления только теми мозаичными элементами с полезной информацией.
Согласно второму аспекту изобретения, и со ссылкой на фиг. 5, может обеспечиваться компьютеризированный способ, содержащий прием первой информации положения летательного аппарата (в форме сообщений ACARS, содержащих информацию положения) в первом приемнике по линии передачи цифровых данных от первого радиочастотного источника 50, прием второй информации положения летательного аппарата (в форме широковещательных передач ADS-B) во втором приемнике от второго радиочастотного источника 52 и прием электронных географических картографических данных 54 в третьем приемнике.
Первая и вторая информация положения летательного аппарата принимается от соответствующих радиочастотных источников, расположенных на борту летательного аппарата, и посредством одной или более наземных станций. Первая и вторая информация положения летательного аппарата затем принимается в буфере для буферизации и затем фильтруется 56, чтобы ограничивать количество точек данных информации положения летательного аппарата, обрабатываемых в пределах каждого периода времени, и формировать фильтрованную информацию положения летательного аппарата. Фильтрованная информация положения летательного аппарата затем дополнительно обрабатывается 58, чтобы формировать сглаженную информацию положения летательного аппарата, которая может затем выводиться 60 из процессора таким образом, что она может накладываться на электронные географические картографические данные.
В другом варианте осуществления второго аспекта изобретения, и со ссылкой на фиг. 5a и 5b, может обеспечиваться компьютеризированный способ, содержащий прием 62, в первом приемнике, информации положения ACARS от приемопередатчика ACARS с первой периодичностью; во втором приемнике, информации положения ADS-B от передатчика ADS-B со второй периодичностью, которая является более короткой, чем первая периодичность; в третьем приемнике, электронных географических картографических данных; в четвертом приемнике, радиолокационных данных положения летательного аппарата; в пятом приемнике, метеорологических данных; и в шестом приемнике, данных плана полета. Этот вариант осуществления принимает некоторое количество дополнительных типов данных от различных источников; как должно быть принято во внимание специалистом в данной области техники, промежуточные варианты осуществления могут включать в себя прием только некоторых из этих дополнительных типов данных.
Компьютеризированный способ затем может буферизовать 64 информацию ACARS, ADS-B и радиолокационную информацию положения летательного аппарата и затем фильтровать, в процессоре, чтобы формировать ограниченную величину информации положения летательного аппарата, фильтрованной на основании относительной точности времени и положения источников. Эта фильтрованная информация положения летательного аппарата затем может дополнительно обрабатываться 66 в процессоре, чтобы формировать сглаженную информацию положения летательного аппарата, например, посредством удаления ошибочных точек данных или усреднения точек данных.
Как только данные были обработаны, сглаженная информация положения летательного аппарата может выводиться 68 таким образом, что она может накладываться на электронные географические картографические данные.
В этом варианте осуществления, процессор может быть выполнен с возможностью выводить 72 экстраполированную информацию положения летательного аппарата, если никакая информация положения летательного аппарата не принимается в пределах определённого периода времени. Эта экстраполированная информация положения летательного аппарата предпочтительно выводится таким образом, что она может накладываться на электронные географические картографические данные.
Кроме того, компьютеризированный способ также может предписывать процессору выводить информацию положения ACARS таким образом, что она может накладываться на электронные географические картографические данные помимо сглаженной информации положения летательного аппарата, даже если она не образует часть сглаженной информации положения летательного аппарата. Это означает, что информация положения ACARS может отображаться на электронных географических картографических данных, даже когда информация положения летательного аппарата ACARS была отфильтрована посредством процессора в предпочтение более точной информации положения летательного аппарата. Это обеспечивает дополнительную информацию положения, которая является желательной для конечного пользователя.
Когда точка данных ACARS отображается в дополнение к точкам данных, которые поддерживаются в фильтрованном списке, компьютеризированный способ предпочтительно выполнен с возможностью не сглаживать точку данных ACARS по отношению к фильтрованному списку точек данных. Вместо этого, точка данных ACARS предпочтительно просто отображается помимо сглаженной информации положения летательного аппарата в своем записанном положении, даже если это означает, что точка данных ACARS не находится на кривой полета, показанной посредством сглаженной информации положения летательного аппарата.
Предпочтительно, компьютеризированный способ также предписывает 76 сохранять сглаженную информацию положения летательного аппарата в хранилище данных для последующего анализа.
Блок-схемы последовательностей операций из фиг. 4, 5a и 5b иллюстрируют работу иллюстративного варианта осуществления устройства, компьютеризированного способа и компьютерных программных продуктов согласно одному варианту осуществления настоящего изобретения. Каждый блок в блок-схеме последовательности операций может представлять модуль, содержащий одну или более исполнимых компьютерных инструкций, или часть инструкции, для осуществления логической функции, определенной в блоке. Порядок блоков на диаграмме предназначен только, чтобы быть иллюстрацией примера. В альтернативных вариантах осуществления, логические функции, проиллюстрированные в конкретных блоках, могут совершаться вне порядка, отмеченного на фигурах. Например, обработка, ассоциированная с двумя блоками, может выполняться одновременно или, в зависимости от функциональных возможностей, в обратном порядке. Каждый блок в блок-схеме последовательности операций может осуществляться в программном обеспечении, аппаратном обеспечении или комбинации программного обеспечения и аппаратного обеспечения.
Варианты осуществления изобретения обеспечивают компьютеризированный способ и устройство для отслеживания летательного аппарата, который доставляет высокоточную и динамическую агрегированную информацию положения летательного аппарата, который имеет возможность отслеживать отклонения полета и метеорологические условия, чтобы поддерживать соответствующие процессы принятия решений эксплуатанта летательного аппарата с увеличенной видимостью текущего местоположения летательного аппарата.
Фиг. 6 показывает пример картографических данных, включающих в себя информацию положения летательного аппарата, которая наложена вместе с метеорологическими данными. Метеорологические данные могут содержать текущие метеорологические наблюдения (иногда упоминаемые как прогноз на ближайшее будущее) и метеорологические прогнозы, относящиеся к фронтам, системам давления, струйным течениям, границам тропопауз, плотности освещения, условиям обледенения, турбулентности, громоштормам и другой существенной метеорологической информации (SIGMET).
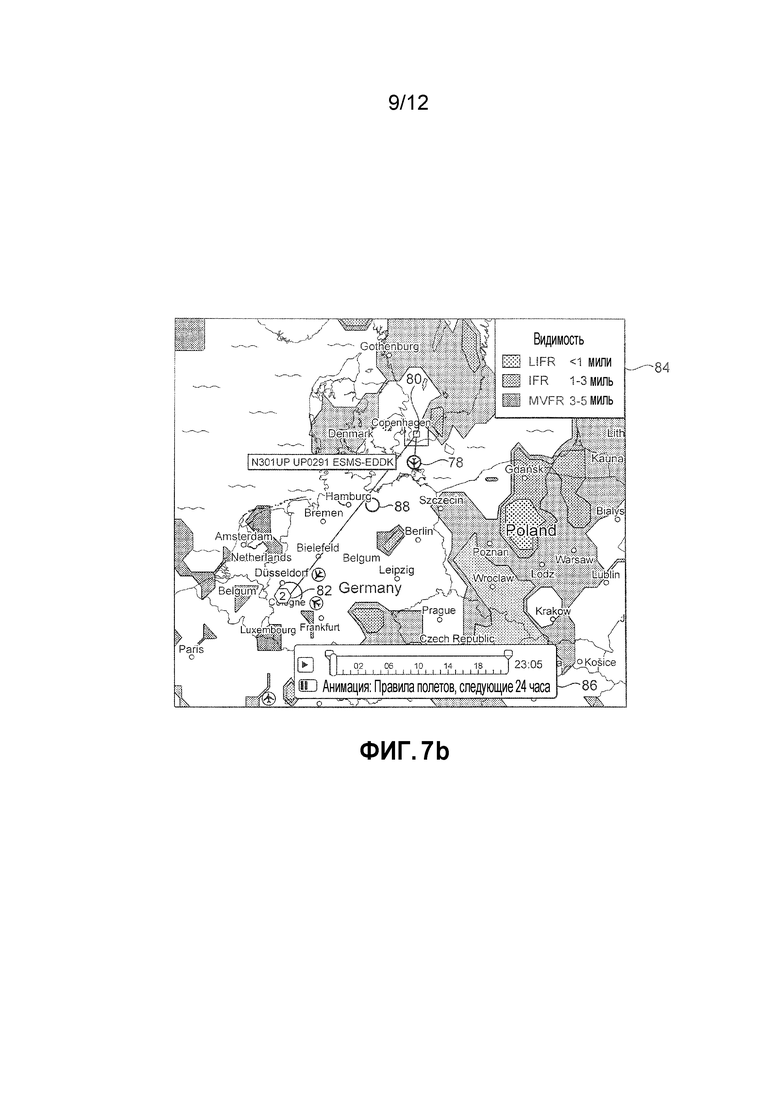
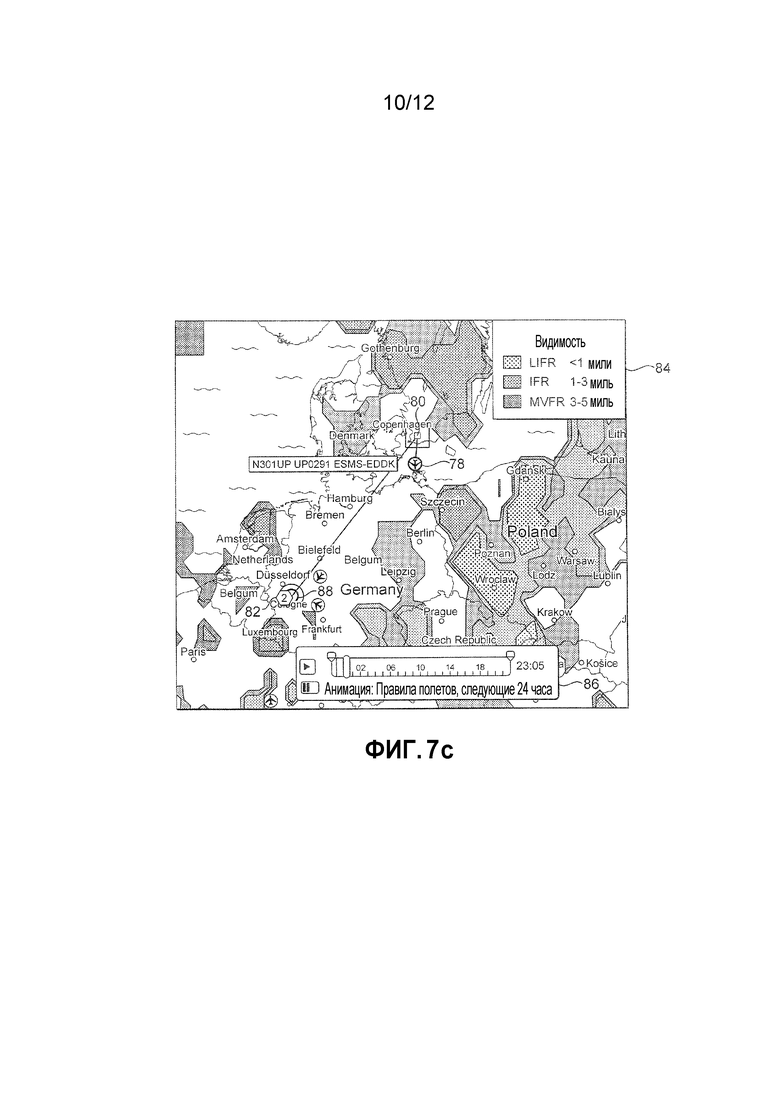
Как показано на фиг. 7a по 7c, предсказанные метеорологические данные могут анимироваться на картографических данных вместе с оцененной в настоящее время траекторией полета, чтобы обеспечивать возможность пользователям более точно анализировать и идентифицировать любые потенциальные проблемы с погодой, которые могут оказывать влияние на летательный аппарат, на основании его запланированного маршрута и текущего положения летательного аппарата.
Некоторые ограниченные по времени слои, такие как наблюдаемые спутниковые изображения, радиолокационные или прогнозируемые турбулентности, наилучшим образом представляются как анимируемые во времени.
Фиг. 7a показывает пиктограмму 78 текущего положения летательного аппарата для летательного аппарата, который взлетел с первого аэропорта 80 и должен приземлиться во втором аэропорте 82. Предсказанные метеорологические данные наложены на картографические данные и описание 84 при необходимости включается туда, чтобы обеспечивать возможность пользователю интерпретировать метеорологические данные. Предсказанные метеорологические данные могут анимироваться посредством нажатия «воспроизвести» в окне 86 временного указателя в нижней части фиг. 7a. Окно 86 временного указателя является средством управления для отображения анимируемых метеорологических слоев, которое может либо воспроизводиться, либо прерываться на паузу и устанавливаться вручную. Фиг. 7b и 7c затем показывают изменение метеорологических условий с течением времени, как проиллюстрировано посредством изменяющегося времени, представленного в правой стороне окна 86 временного указателя, и перемещения временного указателя.
Так как эти анимации представляют предсказание метеорологических условий для будущего, в то время как пиктограмма 78 текущего положения летательного аппарата представляет текущее положение летательного аппарата, пиктограмма 88 оцененного положения летательного аппарата включается в анимацию, чтобы идентифицировать то, где оценивается, что летательный аппарат будет во время, которое выбирается посредством временного указателя, и отображается по отношению к предсказанной погоде. Это обеспечивает возможность пользователю легко определять влияние, которое перемещающиеся метеорологические условия будут иметь на полет летательного аппарата.
Эта оцененная траектория полета может быть основана на экстраполяции из текущего положения, скорости и траектории летательного аппарата на траектории большого круга (самой прямой линии вокруг земли) между фактическим положением летательного аппарата и вторым аэропортом 82. В качестве альтернативы, если данные плана полета являются доступными, то оцененная траектория полета может оцениваться на основании исходного плана полета, при учете информации запланированных промежуточных пунктов маршрута, включенной в данные плана полета. Например, эксплуатант летательного аппарата может быть способным определять, что определённый летательный аппарат должен будет отклониться от его запланированного маршрута, таким образом, обеспечивая возможность эксплуатанту летательного аппарата учитывать любую критику в отношении эффектов, которые это отклонение может иметь, заранее во времени.
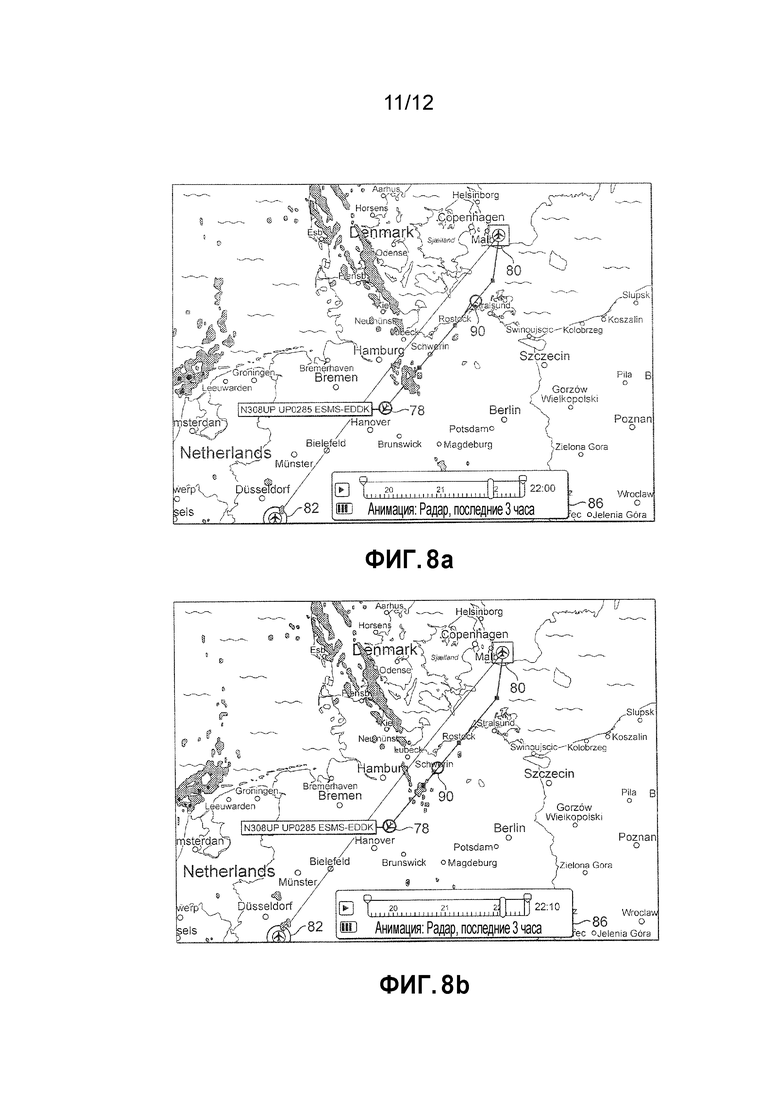
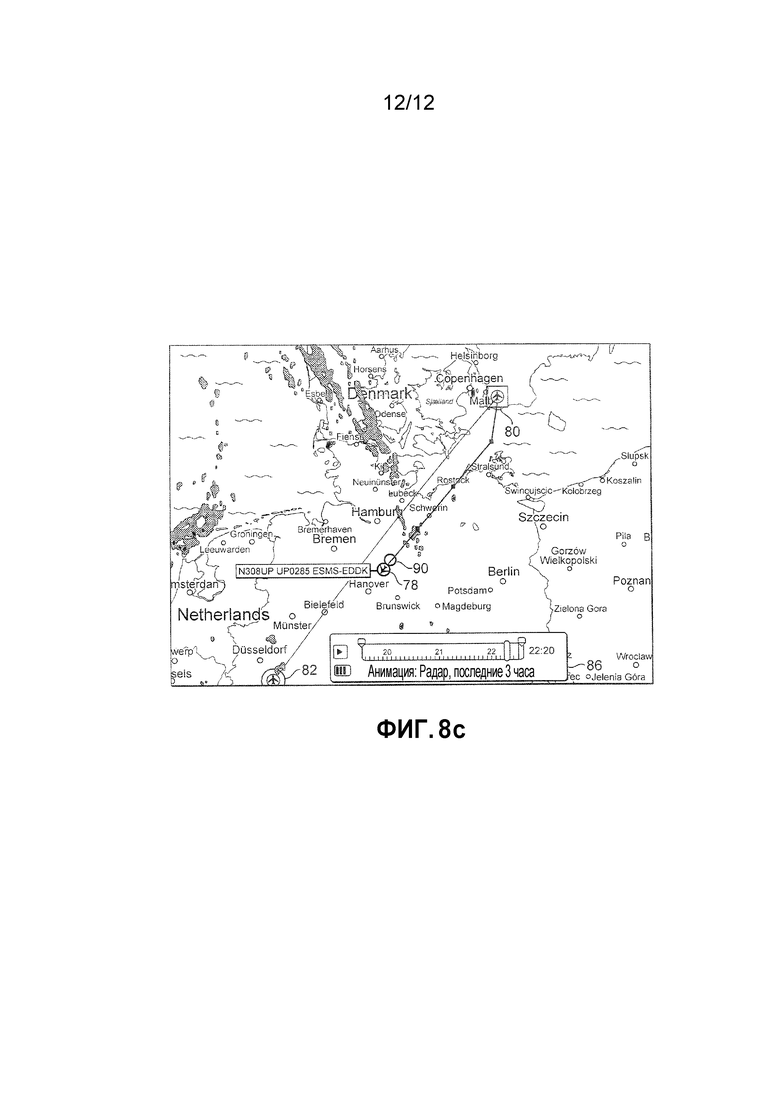
Аналогичный принцип может использоваться с метеорологическими данными, которые представляют наблюдавшиеся метеорологические условия, то есть погоду, которая уже имела место. Как можно видеть из фиг. 8a по 8c, пиктограммы 88 оцененного положения летательного аппарата заменяются на пиктограмму 90 исторического положения летательного аппарата, которая указывает, где летательный аппарат был во время, указанное в окне 86 временного указателя. Эта пиктограмма 90 исторического положения летательного аппарата может представлять интерполяцию между двумя наблюдаемыми положениями летательного аппарата.
Однако пиктограмма 78 текущего положения летательного аппарата предпочтительно всегда отображается и поддерживается в текущем местоположении летательного аппарата таким образом, что текущее местоположение летательного аппарата всегда может идентифицироваться легко, быстро и без помех от каких-либо анимированных прошлых или будущих положений.







Изобретение относится к радиотехнике и может использоваться для отслеживания положений одного или более летательных аппаратов. Технический результат состоит в обеспечении наложения информации положения летательного аппарата на электронные географические картографические данные. Для этого устройство содержит первый приемник, выполненный с возможностью приёма первой информации положения летательного аппарата по линии передачи цифровых данных от первого радиочастотного источника, расположенного на борту летательного аппарата, с первым периодом посредством одной или более наземных станций, и второй приемник, выполненный с возможностью приёма второй информации положения летательного аппарата, передаваемой широковещательным способом от второго радиочастотного источника, расположенного на борту летательного аппарата, со вторым периодом посредством одной или более наземных станций. Устройство дополнительно содержит третий приемник, выполненный с возможностью приёма электронных географических картографических данных, и процессор, выполненный с возможностью приёма первой и второй информации положения летательного аппарата для фильтрации количества первой и второй информации положения летательного аппарата, для сглаживания фильтрованной информации и затем для вывода сглаженной информации таким образом, что она может накладываться на электронные географические картографические данные. 3 н. и 26 з.п. ф-лы, 13 ил.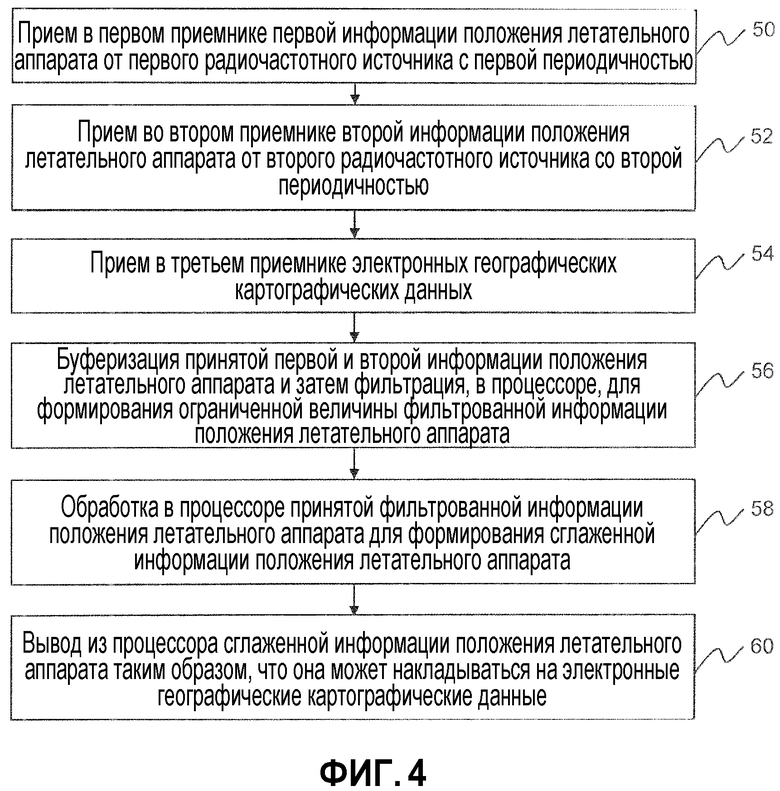
1. Устройство для отслеживания положения одного или более летательного аппарата, содержащее:
первое приёмное устройство, выполненное с возможностью приёма первой информации положения летательного аппарата по линии передачи цифровых данных от первого радиочастотного источника, расположенного на борту летательного аппарата, с первой периодичностью, посредством одной или более наземных станций;
второе приёмное устройство, выполненное с возможностью приёма второй информации положения летательного аппарата, передаваемой широковещательным способом от второго радиочастотного источника, расположенного на борту летательного аппарата, со второй периодичностью, посредством одной или более наземных станций;
буфер, выполненный с возможностью приёма первой и второй информации положения летательного аппарата от первого и второго приёмных устройств соответственно;
процессор, выполненный с возможностью приёма и фильтрации буферизованной первой и второй информации положения летательного аппарата; и сглаживания фильтрованной информации положения летательного аппарата и вывода сглаженной информации положения летательного аппарата таким образом, что она может накладываться на электронные географические картографические данные;
при этом процессор выполнен с возможностью фильтрации первой и второй информации положения летательного аппарата таким образом, что количество данных информации положения, сглаженных для определённого летательного аппарата, находится в пределах определённого предела для определённого периода времени; и
при этом процессор выполнен с возможностью фильтрации информации положения летательного аппарата на основании относительной позиционной точности и относительной временной точности соответствующих источников, от которых принята информация положения летательного аппарата.
2. Устройство по п. 1, в котором процессор выполнен с возможностью сглаживания фильтрованной информации положения летательного аппарата посредством удаления ошибочных точек данных или посредством усреднения точек данных.
3. Устройство по п. 1 или 2, в котором второй период является более коротким, чем первая периодичность.
4. Устройство по любому предшествующему пункту, в котором первый радиочастотный источник содержит приемопередатчик адресно-отчетной системы авиационной связи (ACARS) и первая информация положения летательного аппарата является информацией положения летательного аппарата по ACARS.
5. Устройство по любому предшествующему пункту, в котором второй радиочастотный источник содержит передатчик автоматического зависимого наблюдения-вещания.
6. Устройство по любому предшествующему пункту, в котором упомянутые одна или более наземных станций могут содержать наземную станцию VHF, наземную станцию HF или спутниковую наземную станцию.
7. Устройство по любому предшествующему пункту, дополнительно содержащее четвертый приемник, выполненный с возможностью приёма радиолокационных данных положения летательного аппарата, при этом процессор выполнен с возможностью фильтрации радиолокационных данных положения летательного аппарата в сочетании с первой и второй информацией положения летательного аппарата таким образом, что количество сглаженных данных информации положения находится в пределах определённых пределов для определённого периода времени.
8. Устройство по любому предшествующему пункту, дополнительно содержащее пятый приемник, выполненный с возможностью приёма метеорологических данных, при этом процессор дополнительно выполнен с возможностью вывода метеорологических данных таким образом, что они могут накладываться на электронные географические картографические данные и сглаженную информацию положения летательного аппарата.
9. Устройство по любому предшествующему пункту, дополнительно содержащее шестой приемник, выполненный с возможностью приёма данных плана полета, соответствующих летательному аппарату, при этом процессор дополнительно выполнен с возможностью вывода данных плана полета таким образом, что они могут накладываться на электронные географические картографические данные и сглаженную информацию положения летательного аппарата.
10. Устройство по любому предшествующему пункту, в котором буфер является кольцевым буфером, и при этом фильтр процессора содержит фильтр дискретизации для фильтрации и сортировки информации положения летательного аппарата, подлежащей включению в уменьшенный набор информации положения летательного аппарата, при этом фильтр дискретизации при необходимости основан на критериях времени и точности.
11. Устройство по любому предшествующему пункту, в котором процессор выполнен с возможностью идентификации данных положения летательного аппарата, относящихся к определённому летательному аппарату, посредством механизма сопоставления данных.
12. Устройство по любому предшествующему пункту, дополнительно содержащее хранилище данных, выполненное с возможностью хранения сглаженной информации положения летательного аппарата для последующего анализа.
13. Устройство по любому предшествующему пункту, в котором процессор выполнен с возможностью вывода экстраполированной информации положения летательного аппарата таким образом, что она может накладываться на электронные географические картографические данные, если никакая информация положения летательного аппарата не принимается в процессоре для определённого летательного аппарата в пределах определённого периода времени.
14. Устройство по любому предшествующему пункту, в котором первый радиочастотный источник содержит приемопередатчик адресно-отчетной системы авиационной связи (ACARS) и первая информация положения летательного аппарата является информацией положения летательного аппарата по ACARS; и при этом процессор выполнен с возможностью вывода информации положения летательного аппарата по ACARS таким образом, что она может накладываться на электронные географические картографические данные помимо сглаженной информации положения летательного аппарата, если информация положения летательного аппарата по ACARS не образует часть сглаженной информации положения летательного аппарата.
15. Компьютеризированный способ отслеживания положения одного или более летательных аппаратов, содержащий этапы, на которых:
принимают в первом приёмном устройстве первую информацию положения летательного аппарата по линии передачи цифровых данных от первого радиочастотного источника, расположенного на борту летательного аппарата, с первой периодичностью посредством одной или более наземных станций;
принимают во втором приёмном устройстве вторую информацию положения летательного аппарата, передаваемую широковещательным способом от второго радиочастотного источника, расположенного на борту летательного аппарата, со второй периодичностью посредством одной или более наземных станций;
принимают в буфере принятую первую и вторую информацию положения летательного аппарата;
обрабатывают в процессоре буферизованную первую и вторую информацию положения летательного аппарата для фильтрации первой и второй информации положения летательного аппарата;
обрабатывают в процессоре фильтрованную информацию положения летательного аппарата для формирования сглаженной информации положения летательного аппарата; и
выводят из процессора сглаженную информацию положения летательного аппарата таким образом, что она может накладываться на электронные географические картографические данные;
при этом процессор фильтрует первую и вторую информацию положения летательного аппарата таким образом, что количество данных информации положения, сглаженных для определённого летательного аппарата, находится в пределах определённого предела для определённого периода времени; и
при этом процессор фильтрует информацию положения летательного аппарата на основании относительной позиционной точности и относительной временной точности соответствующих источников, от которых принята информация положения летательного аппарата.
16. Компьютеризированный способ по п. 15, в котором формирование сглаженной информации положения летательного аппарата содержит этап, на котором удаляют ошибочные точки данных или усредняют точки данных.
17. Компьютеризированный способ по любому из пп. 15 или 16, в котором вторая периодичность короче, чем первая периодичность.
18. Компьютеризированный способ по любому из пп. 15 - 17, в котором первую информацию положения летательного аппарата принимают в первом приемнике от приемопередатчика адресно-отчетной системы авиационной связи (ACARS), и первая информация положения летательного аппарата является информацией положения летательного аппарата по ACARS.
19. Компьютеризированный способ по любому из пп. 15 - 18, в котором вторую информацию положения летательного аппарата принимают во втором приемнике от передатчика автоматического зависимого наблюдения-вещания.
20. Компьютеризированный способ по любому из пп. 15 - 19, в котором первая и вторая информация положения летательного аппарата может приниматься посредством одной или более из наземной станции VHF, наземной станции HF или спутниковой наземной станции.
21. Компьютеризированный способ по любому из пп. 15 - 20, дополнительно содержащий этапы, на которых принимают в четвертом приемнике радиолокационные данные положения летательного аппарата, фильтруют радиолокационные данные положения летательного аппарата в сочетании с первой и второй информацией положения летательного аппарата таким образом, что количество сглаженных данных информации положения находится в пределах определённого предела для определённого периода времени.
22. Компьютеризированный способ по любому из пп. 15 - 21, дополнительно содержащий этап, на котором принимают в пятом приемнике метеорологические данные и выводят из процессора метеорологические данные таким образом, что они могут накладываться на электронные географические картографические данные.
23. Компьютеризированный способ по любому из пп. 15 - 22, дополнительно содержащий этапы, на которых принимают в шестом приемнике данные плана полета, соответствующие летательному аппарату, и выводят из процессора данные плана полета таким образом, что они могут накладываться на электронные географические картографические данные и сглаженную информацию положения летательного аппарата.
24. Компьютеризированный способ по любому из пп. 15 - 23, в котором буфер является кольцевым буфером, и при этом этап фильтрации процессора содержит этап, на котором используют фильтр дискретизации для фильтрации и сортировки информации положения летательного аппарата для включения в уменьшенный набор информации положения летательного аппарата, при этом фильтр дискретизации при необходимости основан на критериях времени и точности.
25. Компьютеризированный способ по любому из пп. 15 - 24, причём способ дополнительно содержит этап, на котором идентифицируют в процессоре данные положения летательного аппарата, относящиеся к определённому летательному аппарату, посредством механизма сопоставления данных.
26. Компьютеризированный способ по любому из пп. 15 - 25, в котором сглаженную информацию положения летательного аппарата сохраняют в хранилище данных для последующего анализа.
27. Компьютеризированный способ по любому из пп. 15, 16, в котором процессор дополнительно выводит экстраполированную информацию положения летательного аппарата таким образом, что она может накладываться на электронные географические картографические данные, если никакая информация положения летательного аппарата не принимается в процессоре для определённого летательного аппарата в пределах определённого периода времени.
28. Компьютеризированный способ по любому из пп. 15 - 27, в котором первую информацию положения летательного аппарата принимают в первом приемнике от приемопередатчика адресно-отчетной системы авиационной связи (ACARS), и первая информация положения летательного аппарата является информацией положения летательного аппарата по ACARS; и при этом процессор дополнительно выводит информацию положения летательного аппарата по ACARS таким образом, что она может накладываться на электронные географические картографические данные помимо сглаженной информации положения летательного аппарата, если информация положения летательного аппарата по ACARS не образует часть сглаженной информации положения летательного аппарата.
29. Устройство для отслеживания положения летательного аппарата, содержащее:
первое приёмное устройство, выполненное с возможностью приёма информации положения летательного аппарата, соответствующей летательному аппарату;
второе приёмное устройство, выполненное с возможностью приёма некоторого количества кадров метеорологических данных, при этом каждый кадр соответствует определённому моменту во времени;
процессор, выполненный с возможностью приёма информации положения летательного аппарата, метеорологических данных и вывода данных положения летательного аппарата для летательного аппарата, соответствующих каждому моменту во времени, представленному посредством кадров метеорологических данных;
при этом процессор дополнительно выполнен с возможностью вывода информации положения летательного аппарата, данных положения летательного аппарата и метеорологических данных таким образом, что они могут накладываться на электронные географические картографические данные; и
при этом для кадров метеорологических данных, соответствующих будущему моменту времени, процессор дополнительно выполнен с возможностью оценки данных положения летательного аппарата на основании экстраполяции из положения и траектории летательного аппарата, идентифицированных посредством информации положения летательного аппарата, или на основании интерполяции между положением летательного аппарата, идентифицированным посредством информации положения летательного аппарата, и планом полета, соответствующим летательному аппарату, принятым в процессоре.
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ПОИМПУЛЬСНОЙ ПЕРЕСТРОЙКОЙ НЕСУЩЕЙ ЧАСТОТЫ, НЕЙРОСЕТЕВЫМ РАСПОЗНАВАНИЕМ ОБЪЕКТОВ И ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ | 2011 |
|
RU2439611C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И МНОГОЧАСТОТНЫМ ЗОНДИРУЮЩИМ СИГНАЛОМ | 1999 |
|
RU2152626C1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |

