ОБЛАСТЬ ТЕХНИКИ
[001] Данное техническое решение относится, в общем, к области вычислительной техники, а, в частности, к способам и системам мониторинга авиационного шума и предназначено для мониторинга и анализа шумовой обстановки вблизи аэродромов при выполнении полетов воздушных судов (ВС) различных типов.
УРОВЕНЬ ТЕХНИКИ
[002] Из уровня техники известно техническое решение US9218742B2 «SYSTEM AND METHOD FOR AIRPORT NOISE MONITORING» (правообладатель: PASSUR Aerospace, дата публикации: 20.07.2007). Системы мониторинга авиационного шума применяются для отслеживания текущей шумовой обстановки вблизи аэродромов и траекторий движений воздушных судов. Основными данными, получаемыми системой, являются: информация о траектории движения ВС, уровни шума вблизи аэродрома и метеорологическая информация. Эти и другие данные могут отображаться и анализироваться в режиме реального времени или архивироваться, и / или могут отображаться на веб-сайте для просмотра операторами аэропортов и / или представителями общественности. Система может быть легко установлена в компактном корпусе с использованием множества приемников и датчиков, расположенных на объектах капитального строительства (крыш зданий, вышек беспроводной связи и т.д.) или в виде мобильных комплексов мониторинга (без необходимости монтажа) около аэропорта или вблизи маршрутов движения ВС, и центрального пункта сбора и обработки информации (центрального сервера системы). Результатом работы системы является набор шумовых и траекторных характеристик, позволяющих определить зоны распространения и влияния шума авиационного источника.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[003] Технической задачей или технической проблемой, решаемой в данном техническом решении, является выделение шумовых событий, создаваемых воздушными судами из фонового шума (общегородского), определение типа воздушного судна, создавшего шумовое событие, определение пространственных свойств воздушного судна с дальнейшим анализом зон распространения и влияния шума.
[004] Техническим результатом, достигаемым при решении вышеуказанной технической задачи, является повышение точности анализа акустического воздействия авиационного шума за выбранные периоды времени как для отдельных мест установки пунктов мониторинга шума, так и для всей территории, на которой выполняется мониторинг.
[005] Дополнительными техническими результатами являются определение уровня шумового воздействия и установление его границ, обеспечение оценки изменения шумовой обстановки за период проведения анализа, выявление факта нарушения установленных уровней шума на территории наблюдения, обеспечение возможности управления шумом с целью сохранения или минимизации границ шумового воздействия аэродрома, оценки шумовой обстановки в границах определенных земельных участков приаэродромной территории, оценки влияния нарушений установленных маршрутов ВС на шумовую обстановку, подтверждения границ шумового воздействия, предупреждение о возможных нарушениях установленных границ шумового воздействия, корректировка расчетных границ шумового воздействия.
[006] Техническим результатом, достигаемым при решении вышеуказанной технической задачи, является расширение функциональных возможностей технического решения, а именно возможность регистрации и оценки не только уровней шума гражданских ВС, но и военных, а также проведение обработки всего массива данных о шумах и траекторий движений ВС в режиме реального времени, подготовка отчетной документации в автоматическом режиме, как для отдельных пунктов мониторинга шума, так и для совокупности всех пунктов мониторинга, установленных на территории, для которой проводится мониторинг.
[007] Указанный технический результат достигается благодаря осуществлению способа мониторинга авиационного шума, выполняемого по меньшей мере одним вычислительным устройством, и в котором осуществляют сбор на сервере исходной информации с пункта мониторинга авиационного шума о траекториях ВС, о метеоданных, обработку и передачу данных; осуществляют фильтрацию данных о ВС для определения из всего множества пролетающих ВС только тех, которые выполняют операции взлета, посадки и маневрирования на интересующей территории наблюдения; определяют тип и курс выполняемой ВС операции на основе полученных данных; определяют тип ВС и иную информации о ВС (скорость движения, темп набора и снижения высоты и т.д.) на основании траектории воздушного судна и идентификационных данных ВС; сопоставляют информацию о траектории полета ВС с полученной в результате мониторинга информацией о шумах в момент пролета конкретного ВС; выделяют шум ВС из общего фонового шума в месте установки системы; выполняют анализ выделенного на предыдущем шаге шума ВС; рассчитывают статистические параметры шумового воздействия на интересующей территории наблюдения для совокупности зафиксированных шумовых событий ; осуществляют статистический анализ полученной информации о курсах ВС, маршрутах, траекторий и их распределения и отклонений от установленных и типах операций для территории наблюдения; составляют обобщенные результаты мониторинга и работы системы с подготовкой отчетной и графической информации о шумах, операциях ВС, траекторий движения ВС, о границах шумового воздействия и шумовой обстановке.
[008] Указанный технический результат в определении источника шумового воздействия достигается посредством анализа не только самолетов, оборудованных АЗН-В (ADS-B) передатчиком, но и за счет анализа шума в реальном времени (классификация шумовых событий на основе спектрального анализа шума), т.е. если на приемнике АЗН-В (ADS-B) информация от ВС отсутствует (ВС не оборудовано передатчиком или в передаваемой информации от ВС отсутствуют текущие координаты), но его шум выделяется из фонового шума, то данное акустическое событие попадет в анализ. Таким образом осуществляется классификация звуковых событий согласно спектральным характеристикам источника шума (определение вертолета, ВС государственной авиации, и т.д.).
[009] Также указанный технический результат достигается за счет осуществления системы мониторинга авиационного шума, которая содержит по меньшей мере один пункт мониторинга авиационного шума , содержащий шумомер, выполненный с возможностью объективного измерения уровня шума и/или микрофон, и/или блок сбора, обработки и передачи первичных данных; метеостанцию, выполненную с возможностью регистрации температуры, влажности, скорости и направление ветра; приемное устройство информации о пролетающих ВС, выполненное с возможностью получения информации о текущих координатах ВС, пролетающих вблизи аэродрома, вертикальной и горизонтальной скорости, вектора движения, временной метки отправки сообщения; сервер, выполненный с возможностью централизованного сбора, обработки и хранения информации, поступающей с пункта мониторинга авиационного шума и приемников АЗН-В данных, метеостанции; базы данных, веб-приложение, выполненное с возможностью представления информации о шумах, пролетающих ВС, метеоданных пользователю и возможность автоматического создания отчетов за выбранные периоды.
[0010] В некоторых вариантах осуществления изобретения пункт мониторинга авиационного шума является мобильным или стационарным.
[0011] В некоторых вариантах осуществления изобретения шумомер, входящий в состав пункта мониторинга авиационного шума, имеет первый или второй класс точности.
[0012] В некоторых вариантах осуществления изобретения блоком сбора, обработки и передачи первичных данных является одноплатный компьютер с возможностью подключения шумомера посредством последовательного порта или иного цифрового или аналогового интерфейса для получения данных об уровне звукового давления.
[0013] В некоторых вариантах осуществления изобретения приемным устройством информации о пролетающих ВС является приемник АЗН-В (ADS-B).
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0014] Признаки и преимущества настоящего технического решения станут очевидными из приведенного ниже подробного описания и прилагаемых чертежей, на которых:
[0015] На Фиг. 1 показан пример реализации способа мониторинга авиационного шума в виде блок-схемы.
[0016] На Фиг. 2 показан пример реализации системы мониторинга авиационного шума с пунктом мониторинга авиационного шума.
[0017] На Фиг. 3 показан пример реализации системы мониторинга авиационного шума с пунктом мониторинга авиационного шума, который дополнительно включает метеостанцию и различные датчики.
[0018] На Фиг. 4 показан пример реализации системы мониторинга авиационного шума с пунктом мониторинга авиационного шума, где раскрывается получение всех сообщений от ВС на ADS-B приемнике.
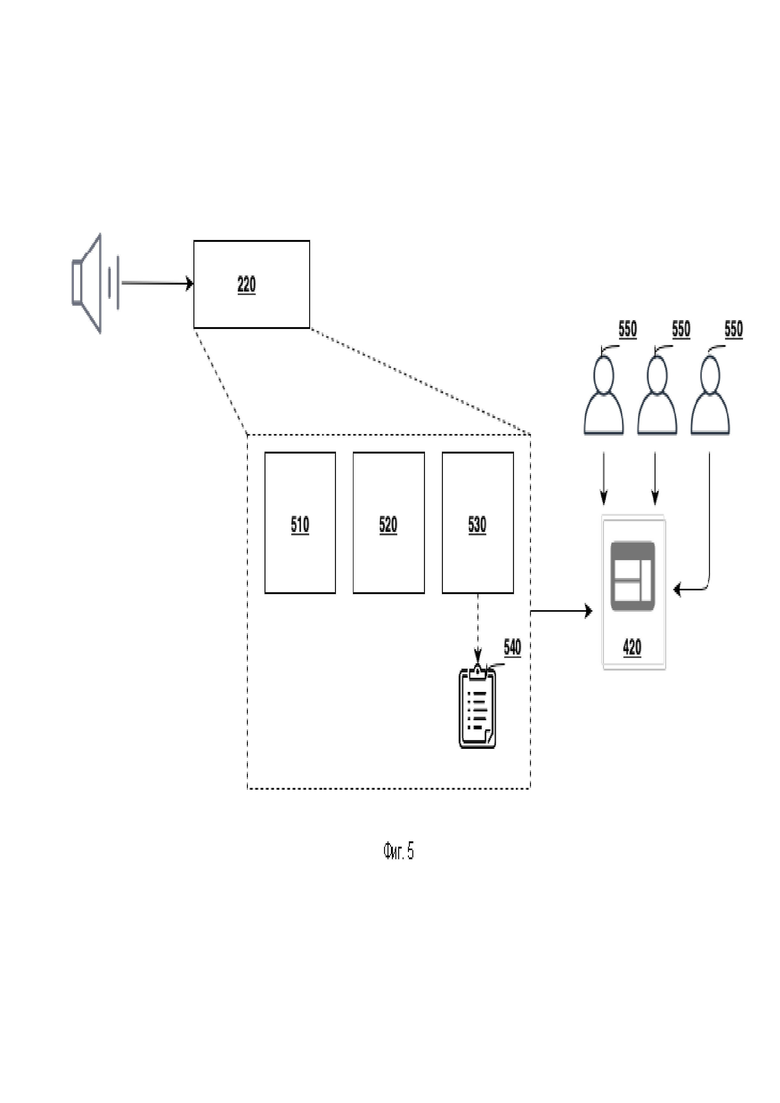
[0019] На Фиг. 5 показан пример реализации системы мониторинга авиационного шума с пунктом мониторинга авиационного шума, где раскрывается использование алгоритмов системы по обработке шумовых данных, а также доступ указанных данных в веб-приложении пользователями.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0020] Предпосылками создания данного технического решения является то, что при эксплуатации аэродромов должны быть определены шумовые зоны по критериям, определенным санитарным законодательством, которые накладывают ограничения на использование территорий, прилегающих к аэродрому. Представленное техническое решение позволяет выделять зоны заданного критерия воздействия, а также проводить мониторинг с целью подтверждения расчетных зон шумового воздействия.
[0021] Ниже будут подробно рассмотрены термины и их определения, используемые в описании технического решения.
[0022] В данном изобретении под системой подразумевается компьютерная система, ЭВМ (электронно-вычислительная машина), ЧПУ (числовое программное управление), ПЛК (программируемый логический контроллер), компьютеризированные системы управления и любые другие устройства, способные выполнять заданную, четко определенную последовательность операций (действий, инструкций), централизованные и распределенные базы данных.
[0023] Под устройством обработки команд подразумевается электронный блок либо интегральная схема (микропроцессор), исполняющая машинные инструкции (программы), или подобное. Устройство обработки команд считывает и выполняет машинные инструкции (программы) с одного или более устройства хранения данных. В роли устройства хранения данных могут выступать, не ограничиваясь, жесткие диски (HDD), флеш-память, ПЗУ (постоянное запоминающее устройство), твердотельные накопители (SSD), оптические приводы.
[0024] Программа - последовательность инструкций, предназначенных для исполнения устройством управления вычислительной машины или устройством обработки команд.
[0025] Шумомер — прибор для объективного измерения уровня звука. В данном техническом решения оцениваются все шумовые события от воздушных судов (ВС), включая вертолеты, военные самолеты и т.д. Пределы измерения могут быть от 24дБа до 120дБа, но это не существенно.
[0026] Данное техническое решение может состоять из следующих компонент, которые подробно описаны ниже и показаны в качестве примера на Фиг. 2.
[0027] Система 200 может включать в себя:
[0028] Пункт мониторинга авиационного шума 210 (может иметь стационарное и мобильное исполнение). Функционально различий в стационарном и мобильном исполнении нет. Данные о шумах от мобильного мониторинга и стационарного равноценны. Мобильный мониторинг подразумевает только более удобное исполнение прибора 210 для его переноса и хранения. Это оборудование может включать в себя шумомер 220 первого класса точности, микрофон 230, блок сбора, обработки и передачи (на сервер) первичных данных 240, источник бесперебойного питания 250. Для проведения оценки уровней шума на территории, согласно утвержденных ГОСТ, допускается применение шумомеров 220 как 1-го, так и 2-го класса точности. Для обеспечения более достоверных измерений в данном техническом решении используется 1-й класс точности. Применение шумомеров 2-го класса точности не целесообразно из-за большей погрешности. В качестве блока сбора, обработки и передачи (на сервер) первичных данных 240 может использоваться одноплатный компьютер с возможностью подключения шумомера 220 посредством цифровых или аналоговых интерфейсов для получения данных об уровне шума. Обработка подразумевает сбор информации об уровне звукового давления с шумомера 220 и отправку данных на сервер 260 технического решения. В случае отсутствия соединения с сервером 260, данные накапливаются в локальной базе данных 270, и при восстановлении соединения отправляются на сервер 260.
[0029] Также пункт мониторинга авиационного шума 210 может содержать метеостанцию 280, как показано на Фиг. 3. Согласно ГОСТ 22283-2014 при оформлении протокола измерений уровней шума на территории жилой застройки необходимо указывать метеоусловия за период проведения измерений. Метеостанция 280 регистрирует температуру, влажность, скорость и направление ветра. Данные поступают на сервер 260 технического решения и хранятся в базе данных 290 системы. Предпочтительно метеостанция 280 выполнена с возможностью контроля направления и силы ветра, наличия осадков, давления, влажности и температуры окружающего воздуха, не ограничиваясь.
[0030] Дополнительно в пункте мониторинга авиационного шума 210 могут использоваться дополнительные датчики и сенсоры 300 для проверки работоспособности систем. В качестве датчиков 300 могут использоваться датчики температуры внутри корпусов измерительных комплексов, датчик открытия двери стационарного комплекса измерений, GPS-приемники в мобильных комплексах для точного определения места проведения измерений, а также синхронизации времени, датчики силы тока и напряжения цепей питания блока опроса и обработки данных не ограничиваясь.
[0031] Также пункт мониторинга авиационного шума 210 содержит приемное устройство 400 информации о пролетающих ВС (например, станция ADS-B), как показано на Фиг. 4. В некоторых вариантах реализации могут использовать адресно-отчётную систему авиационной связи, АОСАС (англ. Airborne Communications Addressing and Reporting System, ACARS) — цифровую систему связи, применяемую в авиации для передачи коротких, относительно простых сообщений между летательным 410 аппаратом и наземными станциями, либо через прямую радиосвязь, либо через спутниковые системы. АЗН-В 400 (ADS-B) является радиочастотным приемником широковещательных сообщений с бортов ВС 410, который служит для точного (с погрешностью до 90м) определения местоположения ВС 410 в пространстве. Устройство 400 применяется службами аэродрома и пилотами ВС 410 в качестве дополнительного инструмента оценки загруженности воздушного пространства и определения ситуаций опасного сближения с соседними бортами. Передаваемые сообщения с борта ВС 410 содержат информацию о текущих координатах ВС вертикальной и горизонтальной скорости, вектора движения, временной метки отправки сообщения, и дополнительную информацию, например номер рейса и др. Сообщения отправляются в виде закодированных сообщений (стандартизованного формата без шифрования), и могут быть приняты приемными устройствами ADS-B 400 в радиусе до 200км.
[0032] Данные устройства ADS-B 400 и радиолокационные данные обычно идентифицируют летательный аппарат 410 посредством позывного по классификации Международной организации гражданской авиации (ICAO), тогда как данные ACARS обычно используют идентификатор рейса по классификации Международной ассоциации воздушного транспорта (IATA). Соответственно, в некоторых вариантах осуществления создается динамическая таблица, сохраняющая соотношение между позывными ICAO и идентификаторами рейса IATA. Это соотношение может определяться на основании элементов данных, которые указывают как позывной, так и идентификатор рейса для определённого рейса, или, в качестве альтернативы, оно может определяться посредством идентификации промежуточного элемента данных, такого как регистрационный номер летательного аппарата 410, который может отдельно связываться с позывным и идентификатором рейса.
[0033] Принимаемые данные также могут задерживаться вследствие проблем сетевого покрытия, что может вести к тому, что некоторое количество сообщений информации положения летательного аппарата 410 принимается в большом объеме в одно и то же время. Сообщения с информацией о положении воздушного судна 410 включают в себя данные временных меток и, таким образом, эти сообщения предпочтительно располагаются в их должном временном порядке до того, как данные выводятся посредством интерфейса.
[0034] Как описано выше, данные устройства ADS-B 400 передаются широковещательным способом с позиционной точностью пяти десятичных разрядов и временной точностью порядка 10 с. Соответственно данные устройства ADS-B 400 будут иметь предпочтение над данными ACARS, которые имеют позиционную точность трех десятичных разрядов и временную точность 1 минута, при фильтрации информации положения летательного аппарата 410, принятой в пределах определённого периода времени, чтобы обеспечивать, что полное количество точек данных в этом периоде времени не превосходит предела.
[0035] Данное техническое решение содержит сервер 260, который представляет собой централизованное место сбора, обработки и хранения информации, поступающей с пунктов мониторинга авиационного шума 210 системы мониторинга авиационного шума 200, включая данные о текущих значениях шума, ВС 410 в поле видимости приемного устройства ADS-B 400, метеоданных и т.д.
[0036] Данные от измерительных приборов и сенсоров 300 представляют собой данные о времени измерения той или иной физической величины. Данные о шуме могут формироваться в формате JSON сообщения, и включают в себя:
[0037] {
• Макс. уровень звука (спектральная характеристика “А”, временная характеристика “Медленно”), дБА;
• Спектр (1/3; 1/12 октавы, спектральная характеристика “А”, временная характеристика “Медленно”), дБА;
• Временной интервал между текущим и предыдущим измерениями (временная дискретизация), сек.;
• Мак. уровень звука (спектральная характеристика “А”, временная характеристика “Быстро”)
• Серийный номер измерительного блока, на котором проводится измерение;
• Тип сообщения.
}
[0038] В качестве примера реализации могут быть следующие значения:
{
"la_max": "24.9",
"rta": "-12.5, -10.3, -6.1, -1.6, -1.8, -1.3, -1.0,3.0,2.7, 10.5,1.0, 0.7,1.4,1.8, 10.3, 1.4, 2.7, 5.7, 2.7, 3.3, 4.1, 3.0, 2.7, 4.2, 3.9, 4.8, 5.5, 6.0, 6.8, 7.5, 8.5, 8.9, 10.5 ,11.0 ,12.6 ,13.8", "dt": "2.82",
"laf": "18.6",
"time_stamp": "1611926301.8527713",
"serial_number": "MOBILE9",
"message_type": "noise_message"
}
[0039] Данные с ADS-B приемника 400 могут представлять собой следующие величины:
{
• Время отправки сообщения с ВС, сек;
• Номер станции ADS-B на котором было получено сообщение;
• Тип сообщения;
• Номер рейса;
• Широта ВС в момент отправки сообщения;
• Долгота ВС в момент отправки сообщения;
• Высота ВС в момент отправки сообщения;
• Скорость относительно земли;
• Вертикальная скорость;
• Вектор движения
}
[0040] В качестве примера реализации могут быть следующие значения:
{
"time_stamp": 1612177857.69,
"serial_number": "ADSB_VNK001",
"message_type": "adsb_message",
"hexident": "4249B9",
"callsign": null,
"latitude": 55.60008,
"longitude": 37.26794,
"altitude": 850,
"ground_speed": null,
"vertical_rate": null,
"track": null
}
[0041] Клиентская часть системы 200 представляет собой веб-приложение 420 с возможностью представления всей информации о шумах, пролетающих ВС, метеоданных и т.д. Пользовательское ПО 420 может быть реализовано на любой архитектуре и среде исполнения.
[0042] Далее описывается вариант реализации способа мониторинга авиационного шума с использованием данных, полученных посредством пункта мониторинга авиационного шума 210, который может быть осуществлен в виде последовательности шагов.
[0043] Способ может состоять из нескольких уровней выполнения технического решения.
[0044] Предварительно осуществляют сбор и отправку исходных данных об уровнях звукового давления, корректированного уровня шума, спектре шума (шума) на устройстве 220. В случае потери связи или потери соединения с сервером 260, данные, полученные с пункта мониторинга авиационного шума 210, защищены от потери и при восстановлении правильности работы будут гарантированно доставлены и обработаны.
[0045] Затем осуществляется сбор, фильтрация и отправка пространственных данных о ВС 410 (координаты ВС, высота, скорость, бортовой номер, и т.д.), данные о техническом состоянии на устройстве 400.
[0046] Также выполняют сбор и отправку метеоданных (температура, скорость и направление ветра, влажность, атмосферное давление и т.д., не ограничиваясь) c устройства 280.
[0047] Шаг 110: осуществляют получение на сервере исходной информации о шумах с пункта мониторинга авиационного шума, о траекториях воздушного судна, метеоданных и о техническом состоянии блока сбора, обработки и передачи данных.
[0048] На следующем уровне работы способа используется конвейерная архитектурная обработка данных с пунктов мониторинга авиационного шума 210. Основные алгоритмы, модули и функции, раскрыты ниже:
- получение первичной информации о шумах, ВС, метеоданных и иной информации с пунктов мониторинга авиационного шума 210;
- подтверждение целостности получаемой информации;
- фильтрация данных о ВС 410, с целью определения из всего множества пролетающих ВС только тех, которые выполняют операции взлета, посадки и маневрирования для интересующего аэродрома;
- сохранение получаемой информации в базе данных 290;
- определение типа и курса выполняемой ВС 410 операции;
- на основании данных с приёмного устройства ADS-B 400 осуществляется определение типа воздушного судна 410 и иной информации о ВС 410, представляющей интерес при дальнейшем анализе (владелец ВС, рейс, и т.д.). Информация о траекториях ВС 410 для конкретного аэродрома хранится бессрочно, что позволяет проводить более детальный анализ за большой период времени.
- сопоставление информации о траектории полета ВС 410 с информации о шумах в момент пролета конкретного судна. Результатом данного алгоритма является выделение шума ВС 410 из общего шума в месте установки комплекса 210.
- при отсутствии данных о траектории движения ВС 410 с АЗН-В приемника 400, классификация шумовых событий проводится путем анализа спектральных характеристик получаемого шумового воздействия. В случае совпадения измеренных спектральных характеристик с данными о спектре шума в базе данных 290 системы 200, данное звуковое событие помечается как авиационное. Реализация данного функционала может быть как классического корреляционного метода (определение вероятности совпадения двух сигналов), так и использование классификаторов, построенных на искусственных нейронных сетях. Выбор метода зависит от вероятности появления ВС 410 без передатчика АЗН-В 400 и количества пунктов мониторингов шума 210. Данный метод позволяет определить уровни звука для ВС государственной авиации или ВС 410, не оборудованных АЗН-В передатчиком, и иных ВС.
[0049] На данном уровне предварительно осуществляется получение всех сообщений от ВС 410 на ADS-B приемнике 400. Первичная информация — это данные с пунктов мониторинга шума 210 и приемников ADS-B 400, на основе которых ведется расчет необходимых величин (определение уровней шумов самолета, траекторий движения, т.д.).
[0050] Для всех пакетов данных, отправляемых с пунктов мониторинга шума 210 и приемных устройств ADS-B 400, рассчитываются контрольные суммы. При доставке данных в очередь сообщений проводится перепроверка контрольной суммы, рассчитанной на стороне отправителя и сервера 260. В случае совпадения данных величин, отправителю отправляется сообщение об успешной доставке пакета данных, и данный пакет удаляется у отправителя. В случае несовпадения контрольной суммы, сервер 260 отправляет сообщение отправителю с требованием переслать повторно пакет данных. Несовпадение контрольных сумм означает, что во время передачи часть информации могла быть потеряна или повреждена и данную информацию необходимо перенаправить заново.
[0051] Базы данных 290 находятся на отдельных серверах. В конкретном примере реализации работает четыре базы данных 290. Первые два экземпляра являются основными, а вторые два - резервными, на случай сбоя основных. Переключение между базами данных 290 в случае сбоя осуществляется автоматически, без простоя.
[0052] При получении сообщения на сервере 260 проводится второй этап фильтрации. На данном этапе оценивается, является ли пунктом отправления или пунктом назначения конкретного ВС 410 аэродром, для которого осуществляется мониторинг. Оценка проводится на основе информации о рейсе (например, номер регулярного рейса), или пространственном положении ВС 410. В базе данных 290 хранится информация о всех номерах регулярных рейсов с указанием пункта отправления, пункта назначения, авиакомпании, выполняющей данный рейс. В случае отсутствия информации о рейсе в базе данных, проводится расчет расстояния, высоты, вертикальной скорости и географического положения, на основе которого можно сделать вывод, что данное воздушное судно 410 выполняет операцию взлета, посадки или маневрирования на конкретном аэродроме. Фильтрация необходима для уменьшения неинформативной информации, которая не представляет интереса для определения уровней шума ВС 410 для аэродрома, для которого ведется мониторинг. На первом этапе ведется фильтрация по отдалению ВС 410 от аэродрома и его высота. Второй этап фильтрации определяет более точно, направляется ли ВС 410 в интересующий нас аэродром. Данный фильтр оценивает траекторию движения, темп набора или снижения ВС 410, его курс и тип операции. Диапазоны задаются при пуско-наладочных работах.
[0053] Все сообщения с координатами ВС 410, которые попадают на сервер 260, заносятся в базу данных 290 и группируются под единим идентификатором для каждого уникального ВС 410, при условии, что поток сообщений с координатами от данного ВС 410 не прерывается более чем на 30 мин. Получается, что при получении первого сообщения от ВС 410 в базе данных 290 создается запись с уникальным идентификатором, и все последующие координаты от данного ВС 410 будут иметь аналогичный идентификатор (уникальный идентификатор трека самолета). Таким образом все данные о треке (траектории) связаны только с один конкретным ВС 410. Данные о траекториях движения, типах операций и курсов выполняемых операций для всех ВС 410, которые когда-либо были зафиксированы во время работы системы мониторинга 200. Анализ данной информации позволяет более точно определять интенсивность выполнения полетов вдоль установленных маршрутов. Данная информация позволяет более точно проводить моделирование с целью построения контуров авиационного шума.
[0054] В случае приближения ВС 410 к пункту мониторинга авиационного шума 210 акустического воздействия на расстояние, менее заданного в настройках системы 200, создается запись в базе данных 290 о временном интервале, в который ВС 410 находился рядом с шумомером в составе пункта мониторинга авиационного шума 210. Данная информация позволяет проводить идентификацию шума от ВС в узком временном интервале. Обработка выполняется в режиме реального времени на сервере 260. Для расчета выполняется анализ траектории движения ВС 410 относительно пунктов мониторинга шума 210, при нахождении ВС 410 вблизи пункта, запускается алгоритм поиска и фиксации шума от конкретного ВС 410, который создал данное шумовое событие. Так же в фоновом режиме работает классификатор шума, который выдвигает гипотезу о возможном источнике шумового события, на основе данных о спектре.
[0055] Данные об уровнях шума поступают непрерывно с каждого пункта мониторинга 210. В случае нахождения ВС 410 вблизи станции (расстояние и высота ВС удовлетворяют условиям возможной слышимости на пункте мониторинга шума 210), запускается алгоритм поиска и идентификации ВС 410 в шуме.
[0056] На данном шаге работы способа могут использоваться несколько алгоритмов системы по обработке шумовых данных 200, которые подробно будут раскрыты ниже и показаны на Фиг. 5.
[0057] Модуль расчета статистических параметров шумового воздействия 510 выполняет работы по определению параметров разброса значений уровней шума (математическое ожидание, среднеквадратическое отклонение, расширенная неопределенность измерений) для всех типов ВС, типов операций и курсов. Полученные значения вероятностного распределения значений шума позволяют определить значения шумового воздействия авиационного источника, и дать избыточную информацию для проведения дальнейших работ по оценке зашумления, причем как в месте проведения шумового мониторинга, так и для всей территории подверженной воздействию шума.
[0058] Модуль анализа данных 520 о полетах выполняет статистический анализ информации о курсах, маршрутах и типах операций для интересующего аэродрома. Полученная информация в результате анализа позволяет определять отклонения ВС от установленных маршрутов выполнения операции взлета, посадки и маневрирования, что может являться негативным фактором, увеличивающим акустическое воздействие на территорию вблизи аэродрома. Все установленные маршруты движения описаны и представлены в открытом доступе, а именно в АИП (Сборник Аэронавигационной Информации, иногда AIP от англ. Aeronautical Information Publication). Данные схемы занесены в базу данных 290 системы 200. На основе фактических траекторий движения и утвержденных маршрутов, проводится анализ отклонений в контрольных точках, указанных в АИП. Также анализ отклонений проводится для всех пунктов измерений шума, так как точно известно точное расстояние от пункта измерений шума 210 до установленного маршрута. Основные параметры и значения, получаемые в результате работы модуля 520:
- распределения по типам воздушных судов;
- отклонения фактических траекторий движения ВС от установленных маршрутов движения;
- распределения профилей взлета и посадки;
- распределения загруженности курсов и маршрутов;
- распределения загруженности ИВПП.
[0059] Модуль подготовки отчетов 530 реализует функции по составлению обобщенных результатов работы системы 200 с подготовкой графической информации о полетах, шумах и информации о размерах зоны шумового воздействия. Отчеты 540 могут предоставляться в виде pdf - документа, заданного шаблона. Отчетный период, попадающий в отчет 540, задается оператором системы 200, или в автоматическом режиме с заданным интервалом.
[0060] Отчет 540 для одного пункта мониторинга авиационного шума 210 (ниже - ПМАШ) может включать следующую информацию:
- типы воздушных судов, уровень шума при пролете которых был зафиксирован на ПМАШ 210;
- в отношении каждого воздушного судна в табличном виде указываются следующие сведения: тип ВС, время звукового события, наименование авиакомпании, бортовой номер ВС, тип совершаемой операции, курс операции, уровень максимального шума (LAмакс) при пролете ВС, минимальное расстояние (м) от ПМАШ 210 до зафиксированного воздушного судна;
- cведения о среднем максимальном уровне шума за анализируемый период для всех воздушных судов и для каждого типа воздушного суда, пролеты которых зафиксированы на ПМАШ 210;
- cведения о неопределенности измерений за весь период измерений для всех воздушных судов и для каждого типа воздушного суда, пролеты которых зафиксированы на ПМАШ 210;
- cведения об эквивалентном уровне шума с учетом исключения из анализа влияния фонового шумового воздействия;
- cведения об отклонении фактических маршрутов полетов от установленного маршрута движения в соответствии со сборником аэронавигационной информации в плоскости расположения ПМАШ 210, расположенной перпендикулярно к линии пути следования ВС. Сведения об отклонившихся воздушных судах предоставляются в процентном (%) отношении к общему числу зафиксированных воздушных судов на ПМАШ 210. Мера точности соблюдения установленного маршрута может быть вариативной и устанавливается оператором системы 200, но не менее 100 метров;
- cведения о фактическом распределении линий пути следования ВС за анализируемый период времени для каждой операции и каждого использованного курса полетов ВС;
- cведения о фактическом распределении профилей полетов ВС за анализируемый период времени для каждой операции и каждого использованного курса полетов ВС;
- в случае, если анализ осуществляется для периода времени, более чем два дня, предоставляется диаграмма изменений параметров за дневной (с 7.00 до 23.00) и ночной (с 23.00 до 07.00) периоды времени в отношении каждого из анализируемых дней:
- курсы и операции ВС, полеты которых оказали воздействие на ПМАШ;
- средний максимальный уровень звука;
- эквивалентный уровень звука;
- процентное отношение зафиксированных шумовых событий при пролетах воздушных судов от общего количества воздушных судов, осуществивших полеты на исследуемом аэродроме.
- погодные условия.
[0061] Отчет 540 по результатам работы системы мониторинга шума 200 может включать следующую информацию:
- карту с расположением ПМАШ 210;
- карту с установленными маршрутами полетов в соответствии со сборником аэронавигационной информации;
- сведения об эксплуатации курсов полетов при взлете и посадке ВС в процентном отношении от общего числа эксплуатируемых ВС на аэродроме за рассматриваемый период;
- сведения об отклонении фактических маршрутов полетов от установленного маршрута движения в соответствии со сборником аэронавигационной информации в плоскости, расположенной перпендикулярно к линии пути следования ВС. Плоскости располагаются в интервале 1000 метров от торца ВПП в направлении от ИВПП для каждого используемого маршрута полетов ВС. Сведения об отклонившихся воздушных судах предоставляются в процентном (%) отношении к общему числу ВС, осуществивших полет с использованием заданного маршрута и схемы движения ВС. Мера точности соблюдения установленного маршрута может быть вариативная и устанавливается оператором системы, но не менее 100 метров;
- сведения об изменении параметров за дневной (с 7.00 до 23.00) и ночной (с 23.00 до 07.00) периоды времени на каждой ПМАШ в составе системы мониторинга авиационного шума:
- курсы и операции ВС, полеты которых оказали воздействие на ПМАШ;
- средний максимальный уровень звука;
- эквивалентный уровень звука;
- процентное отношение зафиксированных шумовых событий при пролетах воздушных судов от общего количества воздушных судов, осуществивших полеты на исследуемом аэродроме.
- сведения об эксплуатируемых типах ВС за исследуемый период времени для дневного и ночного периодов времени;
- сведения об использованных курсах при взлетах и посадках ВС для дневного и ночного периодов времени;
- сведения о ночном и дневном распределении ВПО в процентом отношении от общего числа ВПО;
- сведения о фактическом распределении линий пути следования ВС за анализируемый период времени для каждой операции и каждого использованного курса полетов ВС;
- сведения о фактическом распределении профилей полетов ВС за анализируемый период времени для каждой операции и каждого использованного курса полетов ВС;
- сведения о превалировании одних типов ВС / ВС авиакомпаний над иными по фактору шумовое воздействие с приведением средних максимальных уровней шума в отношении каждого из анализируемых;
- сведения о фактической почасовой загрузке аэродрома;
- сведения о фактическом изменение шумовой обстановки в отношении каждого ПМАШ 210;
- сведения о зависимости отклонений ВС от установленных маршрутов на изменение шумовой обстановки на каждом ПМАШ 210;
- сведения об изменении погодных условий: температуре воздуха, направлении и силе ветра.
[0062] На третьем уровне работы технического решения 200 веб-приложение 420 выполняет функции представления данных о шумах, ВС, отчетов и т.д. Также данное ПО 420 включает в себя администраторские функции, которые позволяют управлять работой системы 200, добавлять или редактировать информацию о пунктах мониторинга шума 210 и т.д. Разграничение прав доступа осуществляется на основе регистрации пользователей с задаваемыми уровнями доступа к тем или иным функциям системы 200. Веб-приложение 420 выполняет функцию просмотра данных, конфигурирования системы, системы подготовки отчетов и т.д. У приложения 420 реализован контроль доступа пользователей 550 к тем или иным функциям системы 200. Веб - приложение 420 располагается на выделенном сервере. Запрос данных, которые необходимо отобразить, выполняется с помощью API.
[0063] Практическая польза данного технического решения, которая доказана на практике посредством опытных испытаний, может быть выражена в следующих пунктах:
• управление шумом – по результатам работы системы предоставляется ответ аэропорту об оптимальном перераспределении транспортных потоков для минимизации шумовой нагрузки, оптимизации транспортного потока, повышения транспортной безопасности;
• статистический анализ – оценка и сравнения уровня шума в различные периоды;
• исследовательская часть – исследования в области порядка распространения шума в зависимости от погоды, температуры, типа ВС и пр. По результатам исследований, проведенных на основании данных, полученных с использованием технического решения, можно делать выводы и влиянии авиационного шума на разные факторы (и различных факторов на уровень шума соответственно), а также осуществлять прогнозирование уровня шума;
• фиксация нарушений движения ВС относительно установленных маршрутов или превышения порога допустимых отклонений;
• подтверждение и корректировка расчетных зон шумового воздействия;
• мониторинг шумового воздействия от ВС государственной авиации;
• повышение эффективности использования территорий подверженных шумовому воздействию.
[0064] Элементы заявляемого технического решения находятся в функциональной взаимосвязи, а их совместное использование приводит к созданию нового и уникального технического решения. Таким образом, все блоки функционально связаны.
[0065] Все блоки, используемые в системе, могут быть реализованы с помощью электронных компонент, используемых для создания цифровых интегральных схем, что очевидно для специалиста в данном уровне техники. Не ограничиваюсь, могут использоваться микросхемы, логика работы которых определяется при изготовлении, или программируемые логические интегральные схемы (ПЛИС), логика работы которых задаётся посредством программирования. Для программирования используются программаторы и отладочные среды, позволяющие задать желаемую структуру цифрового устройства в виде принципиальной электрической схемы или программы на специальных языках описания аппаратуры: Verilog, VHDL, AHDL и др. Альтернативой ПЛИС могут быть программируемые логические контроллеры (ПЛК), базовые матричные кристаллы (БМК), требующие заводского производственного процесса для программирования; ASIC - специализированные заказные большие интегральные схемы (БИС), которые при мелкосерийном и единичном производстве существенно дороже.
[0066] Обычно, сама микросхема ПЛИС состоит из следующих компонент:
• конфигурируемых логических блоков, реализующих требуемую логическую функцию;
• программируемых электронных связей между конфигурируемыми логическими блоками;
• программируемых блоков ввода/вывода, обеспечивающих связь внешнего вывода микросхемы с внутренней логикой.
[0067] Также блоки могут быть реализованы с помощью постоянных запоминающих устройств.
[0068] Таким образом, реализация всех используемых блоков достигается стандартными средствами, базирующимися на классических принципах реализации основ вычислительной техники.
[0069] Как будет понятно специалисту в данной области техники, аспекты настоящего технического решения могут быть выполнены в виде системы, способа или компьютерного программного продукта. Соответственно, различные аспекты настоящего технического решения могут быть реализованы исключительно как аппаратное обеспечение, как программное обеспечение (включая прикладное программное обеспечение и так далее) или как вариант осуществления, сочетающий в себе программные и аппаратные аспекты, которые в общем случае могут упоминаться как «модуль», «система» или «архитектура». Кроме того, аспекты настоящего технического решения могут принимать форму компьютерного программного продукта, реализованного на одном или нескольких машиночитаемых носителях, имеющих машиночитаемый программный код, который на них реализован.
[0070] Также может быть использована любая комбинация одного или нескольких машиночитаемых носителей. Машиночитаемый носитель хранилища может представлять собой, без ограничений, электронную, магнитную, оптическую, электромагнитную, инфракрасную или полупроводниковую систему, аппарат, устройство или любую подходящую их комбинацию. Конкретнее, примеры (неисчерпывающий список) машиночитаемого носителя хранилища включают в себя: электрическое соединение с помощью одного или нескольких проводов, портативную компьютерную дискету; жесткий диск, оперативную память (ОЗУ), постоянную память (ПЗУ), стираемую программируемую постоянную память (EPROM или Flash-память), оптоволоконное соединение, постоянную память на компакт-диске (CD-ROM), оптическое устройство хранения, магнитное устройство хранения или любую комбинацию вышеперечисленного. В контексте настоящего описания, машиночитаемый носитель хранилища может представлять собой любой гибкий носитель данных, который может содержать или хранить программу для использования самой системой, устройством, аппаратом или в соединении с ними.
[0071] Программный код, встроенный в машиночитаемый носитель, может быть передан с помощью любого носителя, включая, без ограничений, беспроводную, проводную, оптоволоконную, инфракрасную и любую другую подходящую сеть или комбинацию вышеперечисленного.
[0072] Компьютерный программный код для выполнения операций для шагов настоящего технического решения может быть написан на любом языке программирования или комбинаций языков программирования, включая объектно-ориентированный язык программирования, например Python, R, Java, Smalltalk, С++ и так далее, и обычные процедурные языки программирования, например язык программирования «С» или аналогичные языки программирования. Программный код может выполняться на компьютере пользователя полностью, частично, или же как отдельный пакет программного обеспечения, частично на компьютере пользователя и частично на удаленном компьютере, или же полностью на удаленном компьютере. В последнем случае, удаленный компьютер может быть соединен с компьютером пользователя через сеть любого типа, включая локальную сеть (LAN), глобальную сеть (WAN) или соединение с внешним компьютером (например, через Интернет с помощью Интернет-провайдеров).
[0073] Аспекты настоящего технического решения были описаны подробно со ссылкой на блок-схемы, принципиальные схемы и/или диаграммы способов, устройств (систем) и компьютерных программных продуктов в соответствии с вариантами осуществления настоящего технического решения. Следует иметь в виду, что каждый блок из блок-схемы и/или диаграмм, а также комбинации блоков из блок-схемы и/или диаграмм, могут быть реализованы компьютерными программными инструкциями. Эти компьютерные программные инструкции могут быть предоставлены процессору компьютера общего назначения, компьютера специального назначения или другому устройству обработки данных для создания процедуры, таким образом, чтобы инструкции, выполняемые процессором компьютера или другим программируемым устройством обработки данных, создавали средства для реализации функций/действий, указанных в блоке или блоках блок-схемы и/или диаграммы.
[0074] Эти компьютерные программные инструкции также могут храниться на машиночитаемом носителе, который может управлять компьютером, отличным от программируемого устройства обработки данных или отличным от устройств, которые функционируют конкретным образом, таким образом, что инструкции, хранящиеся на машиночитаемом носителе, создают устройство, включающее инструкции, которые осуществляют функции/действия, указанные в блоке блок-схемы и/или диаграммы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система мониторинга координат спускаемых космических объектов или их аппаратов в атмосфере Земли и их диспетчерского контроля | 2017 |
|
RU2659376C1 |
| УСТРОЙСТВО ДЛЯ ОТСЛЕЖИВАНИЯ ПОЛОЖЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2704130C2 |
| КОМПЛЕКС ВЗЛЕТА, ПИЛОТИРОВАНИЯ И ПОСАДКИ АВТОМАТИЗИРОВАННЫХ ВОЗДУШНЫХ СУДОВ | 2006 |
|
RU2376203C2 |
| Способ дистанционного управления высокоавтоматизированным транспортным средством | 2023 |
|
RU2807410C1 |
| СИСТЕМА УПРАВЛЕНИЯ РАСЧЕТОМ РЕНТАБЕЛЬНОСТИ РЕГУЛЯРНЫХ РЕЙСОВ АВИАКОМПАНИИ | 2004 |
|
RU2280282C2 |
| БОРТОВАЯ ИНТЕГРИРОВАННАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА И КОГНИТИВНЫЙ ФОРМАТ ПРЕДСТАВЛЕНИЯ ПОЛЕТНОЙ ИНФОРМАЦИИ НА ЭТАПЕ "ВЗЛЕТ" МНОГОДВИГАТЕЛЬНОГО ВОЗДУШНОГО СУДНА | 2013 |
|
RU2550887C2 |
| Способ определения уровня транспортной безопасности объектов гражданской авиации РФ | 2017 |
|
RU2692269C2 |
| Многопозиционная система посадки воздушных судов | 2015 |
|
RU2608183C1 |
| АЭРОДРОМНЫЙ АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС МОНИТОРИНГА, УПРАВЛЕНИЯ И ДЕМОНСТРАЦИИ ПОЛЕТОВ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2010 |
|
RU2426074C1 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ | 2002 |
|
RU2242800C2 |




Изобретение относится к измерительной технике, в частности к способам и системам мониторинга авиационного шума. Способ заключается в следующем: осуществляют на пунктах мониторинга авиационного шума сбор исходной информации о шумах с пункта мониторинга авиационного шума, о траекториях воздушного судна (ВС), метеоданных и о техническом состоянии блока сбора, обработки и передачи данных; осуществляют фильтрацию данных о ВС для определения из всего множества пролетающих ВС только тех, которые выполняют операции взлета, посадки и маневрирования для интересующей территории наблюдения; определяют тип и курс выполняемой операции на основе данных, полученных на предыдущем шаге; осуществляют определение типа воздушного судна и информации о ВС, характеризующей тип выполняемой операции, курса выполняемой операции, мгновенной горизонтальной и вертикальной скорости на основании траектории воздушного судна и идентификационных данных ВС; осуществляют расчет отклонений маршрутов ВС от установленных схем, сопоставляют информацию о траектории полета ВС с информацией о шумах в момент пролета конкретного ВС, полученной ранее; выделяют шум ВС из общего шума в месте установки системы; выполняют анализ выделенного на предыдущем шаге шума ВС, причем рассчитывают статистические параметры шумового воздействия на территории вблизи мест установки системы и на всей территории, подверженной шумовому воздействию вблизи аэродрома; осуществляют статистический анализ информации о курсах, маршрутах и типах операций для аэродрома, в котором установлена система; составляют обобщенные результаты работы системы с подготовкой графической информации о шумах, операциях ВС, границах шумового воздействия и шумовой обстановке. Технический результат - анализ акустического воздействия ВС за выбранные периоды времени как для отдельных мест установки системы, так и для всей территории, на которой выполняется мониторинг с целью построения и подтверждения границ шумового воздействия. 2 н. и 15 з.п. ф-лы, 5 ил.
1. Способ мониторинга авиационного шума, выполняемый по меньшей мере одним измерительным и одним вычислительным устройством и включающий шаги, на которых:
осуществляют на пунктах мониторинга авиационного шума сбор исходной информации о шумах с пункта мониторинга авиационного шума, о траекториях воздушного судна (ВС), метеоданных и о техническом состоянии блока сбора, обработки и передачи данных;
осуществляют фильтрацию данных о ВС для определения из всего множества пролетающих ВС только тех, которые выполняют операции взлета, посадки и маневрирования для интересующей территории наблюдения;
определяют тип и курс выполняемой операции на основе данных, полученных на предыдущем шаге;
осуществляют определение типа воздушного судна и информации о ВС, характеризующей тип выполняемой операции, курса выполняемой операции, мгновенной горизонтальной и вертикальной скорости на основании траектории воздушного судна и идентификационных данных ВС;
осуществляют расчет отклонений маршрутов ВС от установленных схем,
сопоставляют информацию о траектории полета ВС с информацией о шумах в момент пролета конкретного ВС, полученной ранее;
выделяют шум ВС из общего шума в месте установки системы;
выполняют анализ выделенного на предыдущем шаге шума ВС, причем
рассчитывают статистические параметры шумового воздействия на территории вблизи мест установки системы и на всей территории, подверженной шумовому воздействию вблизи аэродрома;
осуществляют статистический анализ информации о курсах, маршрутах и типах операций для аэродрома, в котором установлена система;
составляют обобщенные результаты работы системы с подготовкой графической информации о шумах, операциях ВС, о границах шумового воздействия и шумовой обстановке.
2. Способ по п. 1, характеризующийся тем, что в случае потери связи или появлении ошибок программного обеспечения, в результате которых сообщения о физических величинах или состоянии блока перестают поступать на сервер более заданного заранее промежутка времени, инженерам системы отправляется сообщение о неисправности блока.
3. Способ по п. 1, характеризующийся тем, что при первичном сборе исходной информации о шумах с пункта мониторинга авиационного шума осуществляют подтверждение целостности получаемой информации.
4. Способ по п. 1, характеризующийся тем, что для всех пакетов данных, отправляемых с приемных устройств информации о пролетающих ВС, рассчитываются контрольные суммы, причем
проводят перепроверку контрольной суммы, рассчитанной на стороне отправителя и сервера при доставке данных в очередь сообщений;
в случае совпадения данных величин, отправителю отправляется сообщение об успешной доставке пакета данных, и данный пакет удаляется у отправителя;
в случае несовпадения контрольной суммы, сервер отправляет сообщение отправителю с требованием переслать повторно пакет данных.
5. Способ по п. 1, характеризующийся тем, что на этапе фильтрации оценивают, является ли пунктом отправления или пунктом назначения конкретного ВС аэродром, для которого осуществляется мониторинг.
6. Способ по п. 5, характеризующийся тем, что оценка проводится на основе информации о рейсе или пространственном положении ВС.
7. Способ по п. 1, характеризующийся тем, что на первом этапе фильтруют данные по отдалению ВС от аэродрома и его высота, а на втором этапе определяют, направляется ли воздушное судно в интересующий аэродром.
8. Способ по п. 1, характеризующийся тем, что все сообщения с координатами воздушного судна, которые попадают на сервер, заносятся в базу данных и группируются под единым идентификатором для каждого уникального воздушного судна, при условии, что поток сообщений с координатами от данного воздушного судна не прерывается более чем на 30 мин.
9. Система мониторинга авиационного шума, содержащая:
по меньшей мере один пункт мониторинга авиационного шума, содержащий
шумомер, выполненный с возможностью объективного измерения уровня шума,
микрофон,
блок сбора, обработки и передачи первичных данных,
соединительный кабель для связи шумомера и блока сбора, обработки и передачи первичных данных;
источник бесперебойного питания;
метеостанцию, выполненную с возможностью регистрации температуры, влажности, скорости и направления ветра;
соединительный интерфейсный кабель для связи метеостанции и блока сбора, обработки и передачи первичных данных;
приемное устройство информации о пролетающих ВС, выполненное с возможностью получения информации о текущих координатах ВС, временной метки отправки сообщения;
сервер, выполненный с возможностью централизованного сбора, обработки и хранения информации, поступающей с пунктов мониторинга авиационного шума;
веб-приложение, выполненное с возможностью представления информации о шумах, пролетающих ВС, метеоданных пользователю;
модуль расчета статистических параметров шумового воздействия, выполненный с возможностью определения параметров разброса значений уровней шума для всех типов ВС, типов операций и курсов;
модуль анализа данных о полетах, выполненный с возможностью выполнения статистического анализа информации о курсах, маршрутах и типах операций для заданного аэродрома;
модуль подготовки отчетов, выполненный с возможностью составления обобщенных результатов работы системы с подготовкой графической информации о полетах, шумах и информации о размерах зоны шумового воздействия;
классификатор шума, выполненный с возможностью определения источника шумового события на основе данных о спектре.
10. Система по п. 9, характеризующаяся тем, что пункт мониторинга авиационного шума является мобильным или стационарным.
11. Система по п. 9, характеризующаяся тем, что шумомер имеет первый или второй класс точности.
12. Система по п. 9, характеризующаяся тем, что блоком сбора, обработки и передачи первичных данных является одноплатный компьютер с возможностью подключения шумомера посредством последовательного порта для получения данных об уровне шума.
13. Система по п. 9, характеризующаяся тем, что пункт мониторинга авиационного шума дополнительно содержит датчик температуры внутри корпуса измерительного комплекса, и/или датчик открытия двери стационарного комплекса измерений, и/или GPS-приемник в мобильных комплексах для точного определения места проведения измерений.
14. Система по п. 9, характеризующаяся тем, что приемным устройством информации о пролетающих ВС является станция ADS-B.
15. Система по п. 9, характеризующаяся тем, что приемное устройство информации о пролетающих ВС получает сообщения в закодированном виде.
16. Система по п. 9, характеризующаяся тем, что данные о шуме формируются в формате JSON сообщения.
17. Система по п. 9, характеризующаяся тем, что данные о шуме включают в себя максимальный уровень звука, и/или спектр, и/или временной интервал между текущим и предыдущим измерениями, и/или серийный номер измерительного блока, на котором проводится измерение, и/или тип сообщения.
| Машина для изготовления проволочных гвоздей | 1922 |
|
SU39A1 |
| Машина для изготовления проволочных гвоздей | 1922 |
|
SU39A1 |

