Изобретение относится к области транспортных средств, к колесным транспортным средствам (далее - КТС), приводимым в движение мускульной силой человека и/или дополнительным источником энергии. Вместе с тем изобретение относится также к спортивному инвентарю, тренажерам и может быть использовано в области спорта, физической культуры, развлечений, в реабилитационной медицине, а также в робототехнике - как вид экзоскелета.
Из уровня техники широко известны двухколесные транспортные средства велосипеды, конструкция которых предусматривает расположение двух колес одно за другим в одной плоскости. При обычном движении на велосипеде не используется верхние группы мышц рук и спины. Блокирование частей тела и неравномерная мышечная нагрузка неоптимальны. В современные схемы указанных велосипедов добавляют вспомогательные электродвигатели (с аккумулятором и системой управления ходом), обычно в виде одного ведущего мотор-колеса, при этом управление поворотом велосипеда осуществляют механически - поворотом руля.
Также известны гироскутеры (сигвеи), в которых два колеса расположены в параллельных плоскостях и имеют одну общую ось. Гироскутер не активизирует мышечную силу организма, так как естественные движения человека полностью заменяются установленными в гироскутере электродвигателями в виде мотор-колес. Кроме того, схема указанного сигвея, когда колеса закреплены на одной оси - неестественна и сложна для сохранения равновесия (балансирования) пользователя в ходе перемещения. Соответственно, электрическая схема управления движением (вперед-назад и поворотом) оказывается сложной, требующей долгого привыкания, а при изготовлении, наладке и ремонте - точной настройки и мелких работ, что значительно повышает затраты на аппарат и его эксплуатацию.
Также известно колесное транспортное средство - КТС (см. патент РФ на изобретение №2715100, приоритет от 28.10.2019 г. - техническое решение принято в качестве прототипа), содержащее пространственную симметричную конструкцию: раму, имеющую парные продольные направляющие, ручные рычаги, а также содержащее две каретки, поступательно двигающиеся вперед-назад по продольным направляющим, два колеса, закрепленные своими осями на каретках, ручные рычаги, связанные с педалями и колесами, при этом ось каждого колеса, оснащенная звездочками с храповым обгонным механизмом, связана с коленчатым валом (далее - коленвалом) посредством тяги коленвала и цепной передачи, ось вращения коленвала расположена перпендикулярно линиям поступательного движения кареток; коленвал имеет звездочки на шатунах, ручные рычаги качаются на шарнирах, закрепленных на раме, при этом нижний конец каждого ручного рычага через шарнир закреплен на тяге педали, эта тяга педали связана с тягой коленвала, которая при повороте коленвала перемещает каретку с колесами вперед-назад относительно рамы; упомянутая звездочка, закрепленная на шатуне коленвала, при вращении шатуна вокруг оси коленвала вращает цепь, которая в свою очередь вращает звездочку, закрепленную на втулке колеса, вращение шатуна коленвала приводит к попеременному перемещению колес вперед-назад по направляющим и к одновременному их вращению вперед за счет храпового механизма и соответственному движению по дороге.
В качестве колес КТС могут использоваться мотор-колеса с электродвигателями, при этом указанное КТС содержит аккумулятор и электронную систему управления.
Недостатком данного прототипа является сложность общего управления движением КТС (недостаточно удобны его мускульный разгон, требующий начального высокого напряжения пользователя для набора скорости и неудобство поворота ТС путем подгонки фаз и усилия движения ногами с торможением КТС), в итоге - управление поворотом КТС как на ходу, так и в режиме остановки требует достаточно длительного обучения для выработки привычных действий, так как, хотя в схеме прототипа и присутствуют элементы электрической схемы с аккумулятором, она не обеспечивала полноценное управление КТС с помощью электронных средств. В результате аудитория пользователей устройством значительно уменьшена.
Задачей настоящего изобретения является создание и использование в схеме двухколесного транспортного средства (КТС) с параллельным расположением колес, приводимого в движение мускульной силой человека, такой электрической системы управления движением, которая позволяет облегчить или заменить мускульные усилия для движения КТС вперед и облегченно производить повороты КТС в стороны - вправо или влево.
Технический результат заявленного изобретения заключается в расширении арсенала технических средств, то есть в создании устройства, конструкция которого обеспечивает возможность совмещать различные виды активностей, в том числе людям, желающим усилить, развить и повысить активность работы организма. Устройство может быть использовано как транспортное средство с расширенными возможностями не только за счет своей общей конструкции (компактность, устойчивость, схема КТС с обгоняющими колесами применена для физиологически удобного передвижения и естественного поддержания равновесия), но и за счет более простого и удобного управления его движением электронными и электросиловыми средствами. При этом КТС можно использовать также как тренажер спортивный, домашний и для реабилитации.
Как спортивный, физкультурный и реабилитационный тренажер, а также на туристическом маршруте или на соревнованиях (таких как трекинг, городские и кольцевые гонки, единоборства, в военных играх с использованием КТС) устройство позволяет одним джойстиком электронного управления просто регулировать общую нагрузку на организм пользователя, подсчитать количество затраченной энергии в цифровом виде и/или обеспечить соответствующий: облегченный или усиленный режимы движения. При этом, благодаря механической схеме соединения педалей с перемещаемыми колесами через цепные передачи с коленвалом и с перемещаемыми колесами, с добавочной помощью ручных рычагов, КТС совмещает в себе функциональные возможности тренировки мускульных усилий человека: бега или ходьбы с палками, катания на велосипеде и занятия на эллиптическом тренажере. Фактически устройство является прообразом экзоскелета, с расширенной функциональностью за счет электронной и электросиловой схемы управления движением, и может использоваться во всех связанных с ним направлениях.
При этом заявленная конструкция КТС за счет особенностей электронной регулировки, определяемой зонной схемой подачи силового сигнала (смещению джойстика управления движением «вправо-влево» и/или «вперед» соответствует такое же смещение конца вектора по координатной площадке управляющего контроллера, при этом, если координаты конца вектора находятся на этой площадке в зоне штриховки соответствующего мотор-колеса, то уровень воздействия на колесо пропорционален длине указанного вектора), мягко, плавно снижает или увеличивает нагрузку на ноги, руки и спину, не дает ударной нагрузки на суставы, что важно людям со слабой работой мышц, суставов и позвоночника, а также тренирует сердце, что обеспечивает возможность использования устройства людям старшего критического возраста или инвалидам.
Позади на раму ТС легко устанавливается вспомогательное третье колесо, которое облегчает парковку и старт, маневрирование на низких скоростях. Это несложное приспособление занимает мало места (третье колесо в 5-7 раз меньше диаметром, чем основные ведущие колеса). При обычном движении, когда по схеме КТС точка опоры ног находится ниже осей ведущих колес, третье колесо само поднимается, не касается дорожного полотна и не мешает движению, а при остановке становится третьей опорой ТС. Поэтому заявленное изобретение имеет высокую статическую устойчивость трехколесной конструкции, что обеспечивает повышение эффективности тренировочного воздействия на организм человека за счет свободы движений пользователя, увеличения свободы работы тренируемых мышц и суставов при пользовании устройства и вариабельности характера нагрузки, с одновременным исключением риска опасного травматизма, присущего двухколесным конструкциям.
Использование зонного цифрового координатора передачи усилия на мотор-колеса и общей схемы с одним управляющим и двумя силовыми контроллерами значительно упрощает электронную схему управления движением КТС, повышается функциональность (по плавности усилия на двигатели и поворота КТС), надежность работы электрической части конструкции КТС, снижаются затраты на его изготовление и эксплуатацию.
При этом сохраняется возможность осуществлять движение с помощью только мускульного усилия, используя электрический привод для поворота или как вспомогательный на подъемах или по пересеченной местности.
Основная настройка и технические характеристики КТС и его электронной схемы управления движением производится один раз перед началом эксплуатации в соответствии с назначением КТС (как тренажер, туристическое средство или для учета категории пользователя: спортсмен, ребенок, возрастной пользователь, инвалид), с возможностью дополнительной настройки по требованиям заказчика.
Решение поставленной задачи и технический результат достигаются за счет того, что колесное транспортное средство - КТС с электрической системой управления, содержащее пространственную симметричную конструкцию, в составе которой имеются:
рама с парными продольными направляющими, ручные рычаги, две каретки, поступательно двигающиеся вперед-назад по продольным направляющим, два колеса, закрепленные своими осями на каретках, причем ручные рычаги связаны с педалями и колесами, при этом ось каждого колеса связана с коленвалом посредством тяги коленвала и цепной передачи, а ось вращения коленвала расположена перпендикулярно продольным осям поступательного движения кареток;
коленвал, который имеет звездочки на шатунах, оси колес оснащены звездочками с обгонным (храповым) механизмом, ручные рычаги качаются на шарнирах, закрепленных на раме, при этом на нижнем конце каждого ручного рычага на шарнире закреплена тяга педали связанная с тягой коленвала, который посредством тяги коленвала-каретки перемещает колеса вперед-назад относительно рамы;
указанная звездочка, закрепленная на шатуне коленвала, при вращении шатуна вокруг оси коленвала, вращает цепь, которая в свою очередь вращает звездочку, закрепленную на втулке колеса, вращение шатуна коленвала приводит к попеременному перемещению колес вперед-назад по направляющим и к одновременному их вращению вперед за счет обгонного механизма и соответственному движению по дороге;
причем тяговое усилие в КТС может формироваться мускульными усилиями нажима ног пользователя на педали, с движением правого и левого ручных рычагов вперед-назад, или электродвигателями колес, как мотор-колес, с источником энергии - электрическими аккумуляторами и электронной системой управления;
отличающееся тем, что электронная система управления КТС содержит, устройство включения, порты зарядки, сигнальную лампу, джойстик, установленный в верхней или вершинной части одного из ручных рычагов, управляющий контроллер и по силовому контроллеру к каждому мотор-колесу, при этом сигнал на тягу двигателей мотор-колес формируется указанным джойстиком в управляющем контроллере с передачей на силовые контроллеры, а электрическая тяга двигателей формируется на выходе силовых контроллеров мотор-колес;
при этом указанные мотор-колеса можно приводить во вращение как путем мускульных усилий нажима ног и движения ручных рычагов, так и с использованием указанной электронной системы управления.
В частности, джойстик установлен в верхней части ручки правого или левого ручного рычага (см. фиг.5).
В частности, шарнир нижнего конца как левого, так и правого ручного рычага и соответствующие им шарниры тяги коленвала размещены на противоположных концах соответствующей левой или правой тяги педали.
В частности, в состав управляющего контроллера входит цифровой координатор формирования сигналов, подаваемых на силовые контроллеры.
Сущность заявленного изобретения поясняется с использованием следующих фигур:
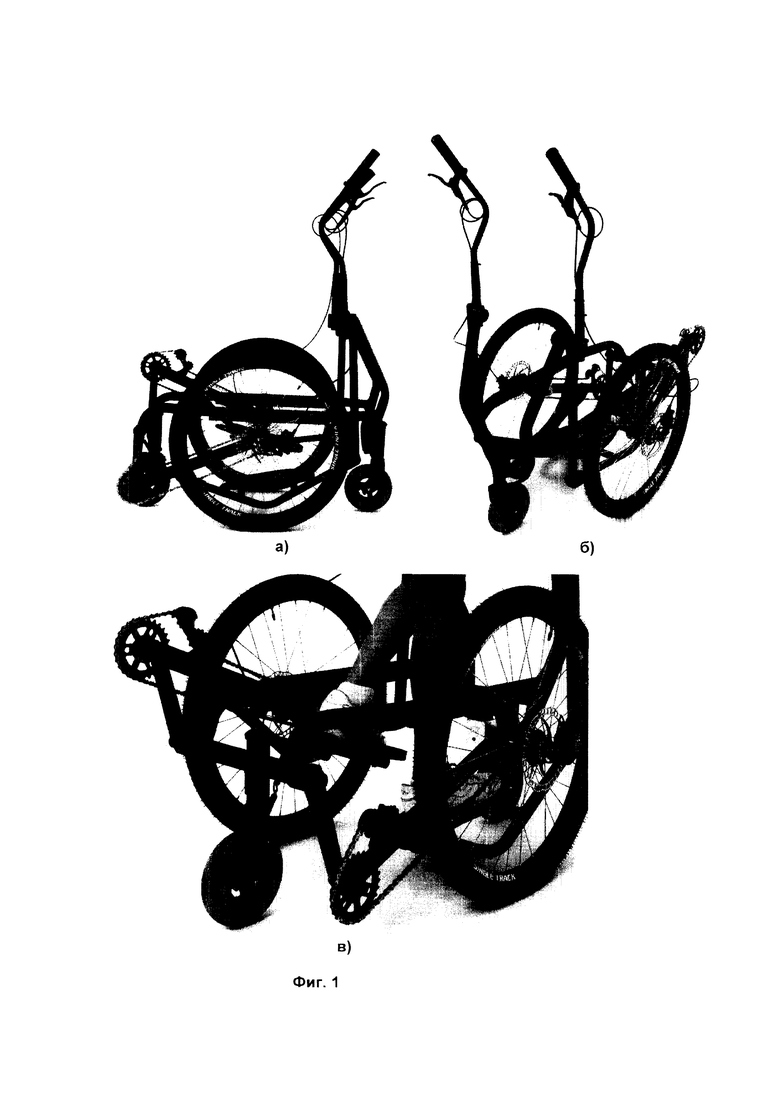
Фиг. 1. Фото конструкции прототипа КТС (а - вид сбоку, б - аксонометрия, общий вид, в - увеличенный вид сзади-сбоку).
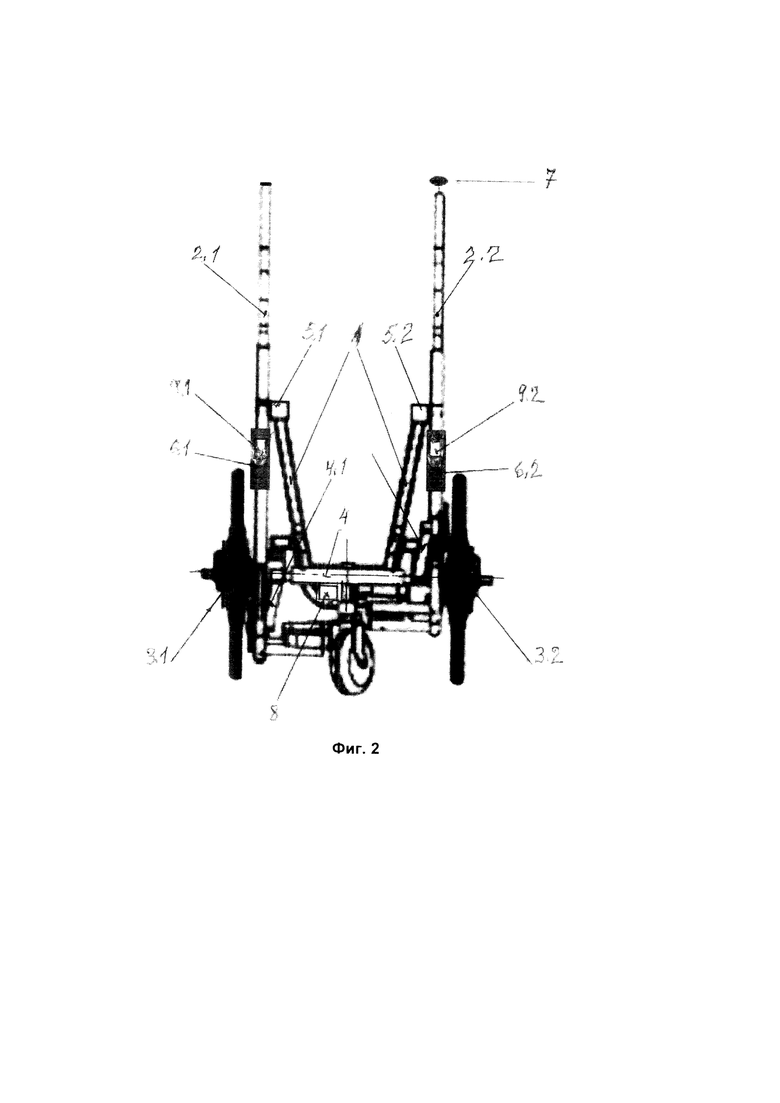
Фиг. 2. Схематический вид на заявляемое КТС сзади (на виде показан вариант пространственного расположения элементов электронной системы управления движением КТС.
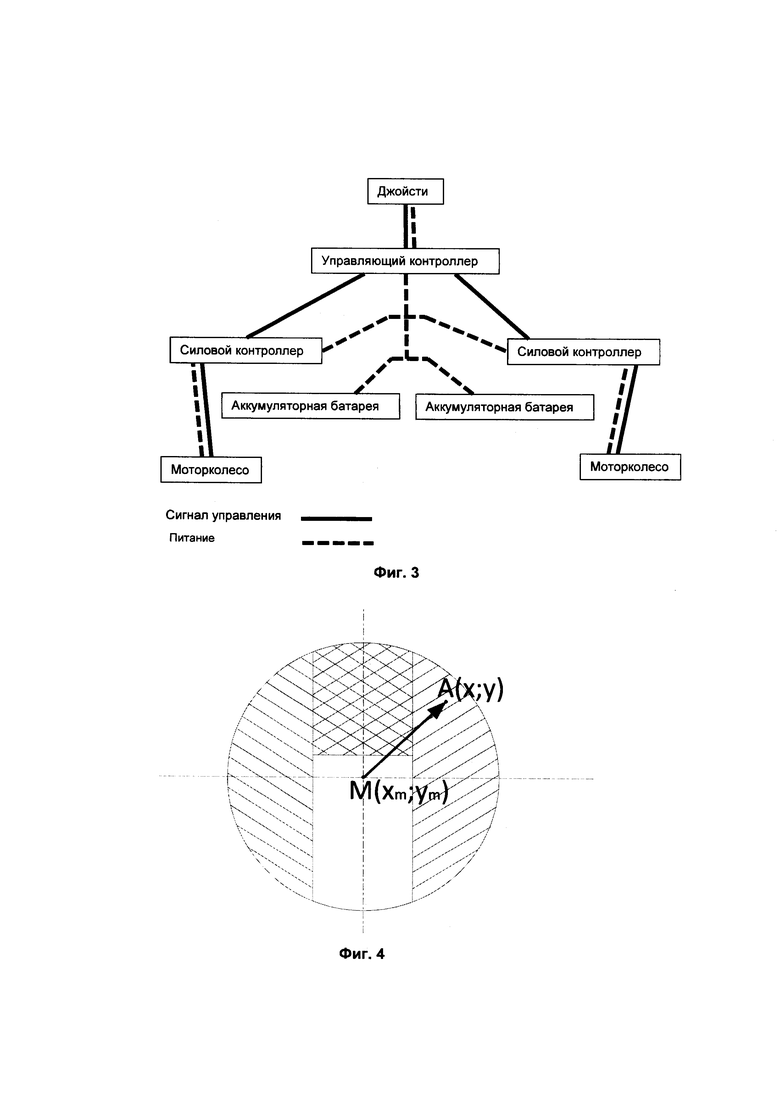
Фиг. 3. Блок-схема электронной системы управления движением КТС.
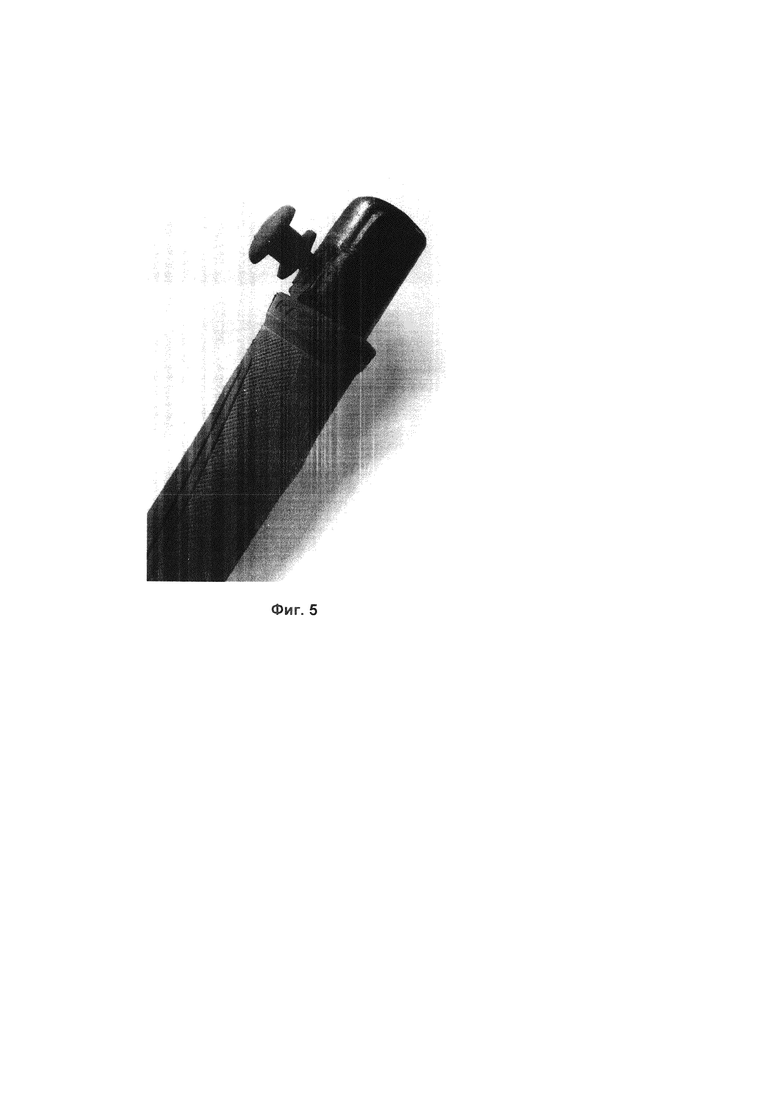
Фиг. 4. Показаны поле пересечения зон и вектор формирования сигнала, регулирующего силу тяги мотор-колес, в схеме цифрового координатора.
Фиг. 5. Фото варианта джойстика, установленного на ручке правого ручного рычага.
На фигурах обозначено:
1 - симметричная рама КТС, плоскостью симметрии которой является продольная срединная вертикальная плоскость КТС,
2.1, 2.2-левый и правый ручной рычаг,
3.1, 3.2 - левое и правое мотор-колесо, 4 - коленчатый вал (коленвал),
4.1, 4.2 - левый и правый шатун коленвала 4,
5.1, 5.2 - левый и правый шарнир рычагов 2.1, 2.2, установленный на раме 1
6.1, 6.2 - левый и правый электрический аккумулятор,
7 - джойстик системы управления движением КТС,
8 - управляющий контроллер,
9.1, 9.2 - левый и правый силовой контроллер.
Представленное КТС состоит из пространственной симметричной конструкции (фиг.1, 2): рамы 1 (имеющей парные продольные направляющие), ручные рычаги 2.1, 2.2, две каретки с возможностью хода вперед-назад по продольным направляющим, два колеса, которые в данной конструкции являются мотор-колесами 3.1, 3.2, закрепленные своими осями на каретках, ручные рычаги 2.1, 2.2, связанные с педалями и колесами 3.1, 3.2, при этом ось каждого указанного колеса связана с коленвалом 4 посредством тяги коленвала и цепной передачи, а ось вращения коленвала 4 расположена перпендикулярно продольным осям поступательного движения кареток; коленвал 4 имеет звездочки на шатунах 4.1, 4.2, оси колес оснащены звездочками с обгонным (храповым) механизмом. При качании ручных рычагов 2.1, 2.2 на шарнирах 5.1, 5.2, закрепленных на раме 1, на нижнем конце каждого ручного рычага начинает двигаться на нижнем шарнире, связанная с рычагом одним своим концом, тяга педали, которая другим своим концом, также через шарнир, связана с тягой коленвала. Коленвал 4 посредством тяги коленвала-каретки перемещает колеса 3.1, 3.2 вперед-назад относительно рамы 1. Указанная звездочка, закрепленная на шатуне 4.1, 4.2 коленвала, при вращении шатунов вокруг оси коленвала 4, вращает цепь, которая в свою очередь вращает звездочку, закрепленную на втулке соответствующего колеса 3.1, 3.2, перемещая колесо вперед-назад и, одновременно, благодаря обгонным втулкам, колесо 3.1 или 3.2 едет только вперед по дорожному полотну. Вместе с тем, движение КТС возможно с одновременным функционированием колес - как мотор-колес 3.1, 3.2, с установленными источником энергии - двумя электрическими аккумуляторами 6.1, 6.2 и электронной системой управления (фиг.2).
При этом электронная система управления КТС содержит устройство включения, порты зарядки, сигнальную лампу, джойстик 7 (общее расположение см. на фиг.2 и фото фиг.5), установленный в верхней части ручки правого ручного рычага 2.2. Также указанная система содержит управляющий контроллер 8 и по силовому контроллеру 9.1, 9.2 к каждому мотор-колесу 3.1, 3.2, при этом сигнал на тягу двигателей указанных мотор-колес формируется указанным джойстиком 7 в управляющем контроллере 8 с передачей сигнала на силовые контроллеры 9.1, 9.2, а электрическая тяга двигателей формируется на выходе силовых контроллеров мотор-колес.
Блок-схема электронной системы управления показана на фиг.3, здесь, в добавление к элементам, показанным на фиг.2, показаны связи системы и управляющего контроллера 8. Он управляет двумя силовыми контроллерами 9.1, 9.2, обеспечивающими тяговую электрическую мощность соответствующего ведущего мотор-колеса 3.1, 3.2. При этом в состав управляющего контроллера входит зонный цифровой координатор формирования сигнала, подаваемого на каждый силовой контроллер 9.1, 9.2.
Управление движением устройства при помощи электронной системы управления и электрической тяги осуществляется посредством аналогового джойстика 7 (grove - thumb joystick, фото фиг.5), установленного в верхней части ручки одного из рычагов КТС. Множество положений джойстика 7 можно условно представить в виде круга с центром в точке М, соответствующей его начальному положению (фиг.4). При отклонении джойстика из центрального положения вперед, когда его координата (х, у) находится в зоне двойной штриховки, начинается вращение обоих мотор-колес вперед. При отклонении джойстика влево (на фиг 4 - зона с левой штриховкой), в движение приводится только правое мотор-колесо, а при отклонении вправо (на фиг 4 - зона с правой штриховкой) - левое мотор-колесо. В конструкции джойстика 7 может быть предусмотрен возвратный механизм, который устанавливает рычаг джойстика в устойчивое центральное положение при отсутствии внешнего воздействия на него. Скорость вращения соответствующего мотор-колеса 3.1, 3.2 пропорциональна величине отклонения джойстика от начального (центрального) положения на заштрихованной зоне и выражается формулой:

где х - смещение джойстика по оси абсцисс, у - смещение джойстика по оси ординат, xm и ym - координаты центрального положения джойстика. При этом при координатах (х, у) конца вектора положения джойстика в области двойной штриховки оба колеса вращаются с одинаковой скоростью и КТС едет вперед. При нахождении конца вектора джойстика в незаштрихованной области мотор-колеса 3.1, 3.2 не приводятся в движение.
Кроме того, при этом пользователь может вращать указанные мотор-колеса 3.1, 3.2 путем собственных мускульных усилий нажима ног на педали и движения правого и левого ручных рычагов 2.1, 2.2 вперед-назад, дополнительно пользуясь указанной электронной системой управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Колесное транспортное средство | 2019 |
|
RU2715100C1 |
| МУСКУЛЬНЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2100240C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 1998 |
|
RU2131820C1 |
| Движитель Н.Т. Краснова с узлом поворота коленвала, транспортное средство с этим движителем и способ его движения (варианты) | 2017 |
|
RU2657710C1 |
| Транспортное средство с мускульным приводом | 1986 |
|
SU1311996A1 |
| Канатный велосипед Костенюка | 2024 |
|
RU2828503C1 |
| ВЕЛОСИПЕД С ЛИНЕЙНЫМ ПРИВОДОМ | 2008 |
|
RU2400391C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2008 |
|
RU2392166C1 |
| МУСКУЛЬНЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2038252C1 |
| ВЕЛОСИПЕД "РОССИЯ" | 1990 |
|
RU2011596C1 |
Изобретение относится к области машиностроения, в частности к колесным транспортным средствам. Транспортное средство с электрической системой управления содержит пространственную симметричную конструкцию, включающую раму, ручные рычаги, две каретки, два колеса. Рама содержит парные продольные направляющие. Ручные рычаги связаны с педалями и колесами. Ось каждого колеса связана с коленвалом посредством тяги коленвала и цепной передачи. Ось вращения коленвала расположена перпендикулярно продольным осям поступательного движения кареток. Коленвал имеет звездочки на шатунах. Оси колес оснащены звездочками с обгонным механизмом. Ручные рычаги качаются на шарнирах, закрепленных на раме. На нижнем конце каждого ручного рычага на шарнире закреплена тяга педали, связанная с тягой коленвала. Электронная система управления содержит устройство включения, порты зарядки, сигнальную лампу, джойстик, управляющий контроллер и по силовому контроллеру к каждому мотор-колесу. Достигается упрощение управления. 3 з.п. ф-лы, 5 ил.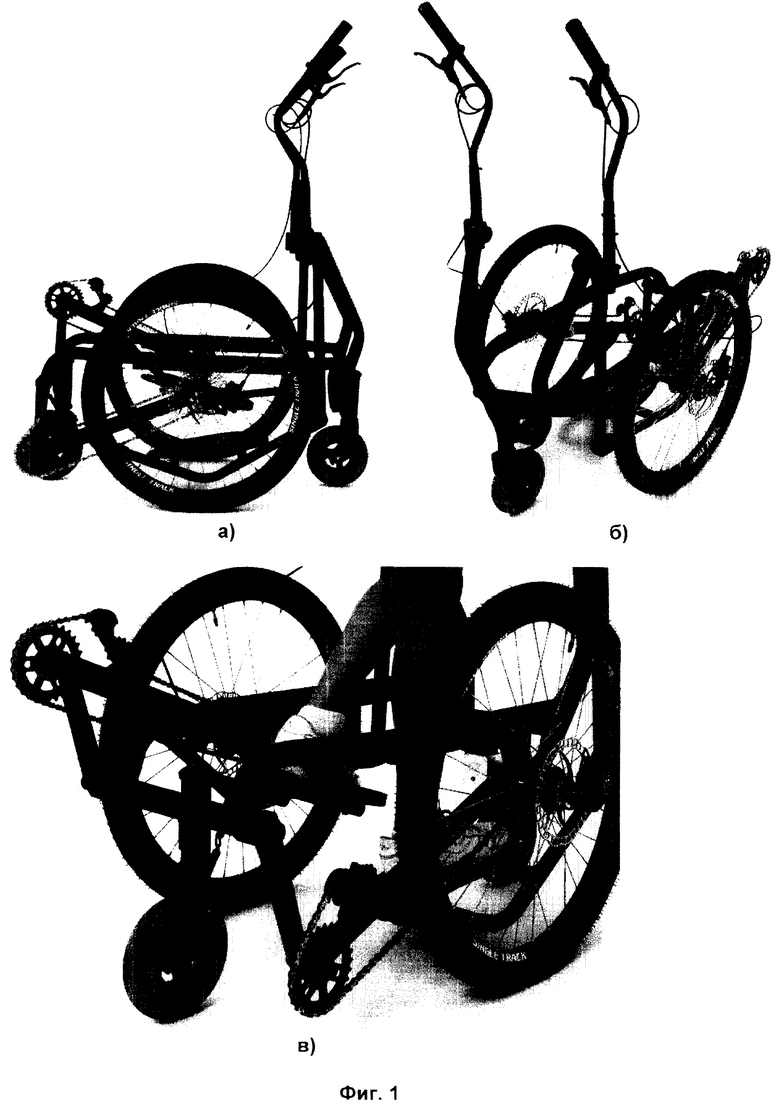
1. Колесное транспортное средство - КТС с электрической системой управления, содержащее пространственную симметричную конструкцию, в составе которой имеются:
рама с парными продольными направляющими, ручные рычаги, две каретки, поступательно двигающиеся вперед-назад по продольным направляющим, два колеса, закрепленные своими осями на каретках, причем ручные рычаги связаны с педалями и колесами, при этом ось каждого колеса связана с коленвалом посредством тяги коленвала и цепной передачи, а ось вращения коленвала расположена перпендикулярно продольным осям поступательного движения кареток;
коленвал имеет звездочки на шатунах, оси колес оснащены звездочками с обгонным механизмом, ручные рычаги качаются на шарнирах, закрепленных на раме, при этом на нижнем конце каждого ручного рычага на шарнире закреплена тяга педали, связанная с тягой коленвала, который посредством тяги коленвала-каретки перемещает колеса вперед-назад относительно рамы;
указанная звездочка, закрепленная на шатуне коленвала, при вращении шатуна вокруг оси коленвала, вращает цепь, которая, в свою очередь, вращает звездочку, закрепленную на втулке колеса, вращение шатуна коленвала приводит к попеременному перемещению колес вперед-назад по направляющим и к одновременному их вращению вперед за счет обгонного механизма и соответственному движению по дороге;
причем тяговое усилие в КТС может формироваться мускульными усилиями нажима ног пользователя на педали, с движением правого и левого ручных рычагов вперед-назад, или электродвигателями колес, как мотор-колес, с источником энергии - электрическими аккумуляторами и электронной системой управления;
отличающееся тем, что электронная система управления КТС содержит: устройство включения, порты зарядки, сигнальную лампу, джойстик, установленный в верхней или вершинной части одного из ручных рычагов, управляющий контроллер и по силовому контроллеру к каждому мотор-колесу, при этом сигнал на тягу двигателей мотор-колес формируется указанным джойстиком в управляющем контроллере с передачей на силовые контроллеры, а электрическая тяга двигателей формируется на выходе силовых контроллеров мотор-колес;
при этом указанные мотор-колеса можно приводить во вращение как путем мускульных усилий нажима ног и движения ручных рычагов, так и с использованием указанной электронной системы управления.
2. КТС по п. 1, отличающееся тем, что джойстик установлен в верхней части на ручке правого или левого ручного рычага.
3. КТС по п. 1, отличающееся тем, что шарнир нижнего конца как левого, так и правого ручного рычага и соответствующие им шарниры тяги коленвала размещены на противоположных концах соответствующей левой или правой тяги педали.
4. КТС по п. 1, отличающееся тем, что в состав управляющего контроллера входит цифровой координатор формирования сигнала, подаваемого на каждый силовой контроллер.
| Колесное транспортное средство | 2019 |
|
RU2715100C1 |
| 0 |
|
SU178762A1 | |
| US 5346280 A1, 13.09.1994. | |||

