Изобретение относится к машиностроению и может быть использовано для привода антенн, телекамер и других объектов пространственного ориентирования по азимуту и углу места.
Опорно-поворотные устройства применяются, в частности, для поворота в двух плоскостях приборов, установленных на них, с целью обнаружения и идентификации объектов, а именно к средствам обеспечения точного позиционирования антенн, видеокамер, тепловизионных камер и других внешних устройств наблюдения и сопровождения этих объектов (целей). Являясь опорным механизмом для целого ряда приборов - видеокамер, тепловизионных камер, антенн радиолокаторов, других приборов - поворотное устройство несет дополнительные функции, обеспечивающие их полноценную работу. Среди таких функций перемещение прибора по азимуту и углу места с заданной скоростью, наведение на объект с максимальной точностью и слежение за движущимся объектом, юстировка положения устройства в горизонтальной и вертикальной плоскостях, фиксация устройства в заданном положении.
Известны конструкции опорно-поворотных устройств по азимуту и углу места, наиболее широко применяемые в настоящее время, построенные на основе двухосного карданова подвеса. (Ривкин С.С., Стабилизация измерительных устройств на качающемся основании. Москва, Наука, 1978, стр. 195-201).
Недостатком таких устройств является сложность конструкции, что влечет за собой ограничения по уменьшению габаритов и массы.
Известны конструкции опорно-поворотных устройств, содержащие неподвижное основание с размещенными на нем механизмами вращения (Покрас A.M., Системы наведения антенн земных станций спутниковой связи, Москва: Связь, 1978, стр. 72-78).
Недостатком таких конструкций является наличие сложных кинематических цепей, включающих зубчатые передачи, тяги и т.д., что также ведет к усложнению конструкции и, следовательно, увеличению массогабаритных характеристик.
Известно устройство для ориентации антенны по азимуту и углу места по патенту RU 2020666, принимаемое нами за прототип. Это устройство содержит два привода, поворотную платформу и неподвижный фланец, на котором с возможностью вращения смонтирован полый азимутальный вал. Вал несет две полуоси, образующие ось наведения по углу места. На этой оси с возможностью вращения установлена поворотная платформа. Азимутальный вал через многоступенчатый редуктор связан с двигателем одного из приводов, базирующимся на неподвижном фланце. Другой привод связан с поворотной платформой и представляет собой каретку, которая имеет возможность возвратно-поступательного движения, вдоль трубы, установленной внутри полого азимутального вала. Она связана реечно-зубчатой передачей с приводом качания на основе двигателя и многоступенчатой зубчатой передачи. Этот привод базируется также на неподвижном фланце.
Недостаток этого устройства в том, что многоступенчатые зубчатые передачи в приводах устройства обладают зазором в зацеплении, который увеличивается с числом ступеней, что приводит к люфту. Применяемые в настоящее время устройства для выборки зазора ведут к усложнению конструкции и увеличивают массогабаритные характеристики привода. Таким образом, задачей изобретения является создание простой и компактной конструкции опорно-поворотного устройства.
Кроме того, поворотная платформа в устройстве - прототипе вместе с азимутальным валом вращается вокруг собственной оси. Это не позволяет использовать проводные линии связи от элементов, смонтированных на поворотной платформе, так как провода при работе устройства будут испытывать переменные нагрузки на скручивание. Поэтому в прототипе используется оптическая связь, которая имеет ограничения по применению.
Технический результат, достигаемый заявляемым изобретением, заключается в упрощении конструкции и уменьшении характеристик по массе и габаритам. Появляется возможность использовать любые средства связи для элементов, смонтированных на поворотной платформе.
Указанный технический результат достигается тем, что опорно-поворотное устройство, как и прототип, содержит два привода, поворотную платформу и неподвижный фланец. Полый азимутальный вал установлен на фланце с возможностью вращения и связан с одним из приводов. В отличие от прототипа полый азимутальный вал выполнен с наклонной к его оси опорной поверхностью. На этой опорной поверхности азимутального вала посажен с помощью подшипников полый элемент, который связан с другим приводом. На другом торце полого элемента, посажена с помощью подшипников поворотная платформа. Плоскости расположения подшипников наклонены друг к другу, а их оси пересекаются. Такое расположение поверхностей подшипников позволяет, при повороте азимутального вала и полого элемента, изменять угловое положение поворотной платформы. В точке пересечения осей подшипников размещен угловой шарнир, связывающий поворотную платформу с неподвижным фланцем. Угловой шарнир, в данной конструкции, служит для предотвращения вращения поворотной платформы вокруг собственной оси. Это позволяет использовать любые средства связи для элементов, монтируемых на поворотной платформе.
Для уменьшения веса, сокращения габаритов и уменьшения кинематических цепей связи двигателей с азимутальным валом и полым элементом возможны различные варианты их компоновки.
Двигатели могут быть агрегатированными с азимутальным валом и полым элементом. В этом случае азимутальный вал и полый элемент будут являться роторами двигателей, а статорами будут служить соответственно неподвижный фланец и поворотная платформа. Для этого варианта необходима разработка индивидуальных двигателей, что не всегда экономически оправдано.
Более экономичным является вариант использования стандартных двигателей, которые целесообразно связать с азимутальным валом и полым элементом через зубчатые пары. Тогда двигатель привода азимутального вала может быть, как и в прототипе, расположен на неподвижном фланце, а двигатель привода полого элемента располагается на поворотной платформе.
В ряде случаев требуется максимально уменьшить инерционную массу поворотной платформы, поэтому двигатель привода полого элемента целесообразно расположить на неподвижном фланце. В этом случае полый элемент связан с двигателем посредством универсального шарнира. В этом качестве может быть использован как стандартный, так и агрегатированный двигатель. С точки зрения массогабаритных показателей наиболее целесообразно использовать агрегатированный двигатель, ротором которого является первый вал универсального шарнира.
Для иллюстрации изобретения приведем варианты конструкций опорно-поворотного устройства.
На фиг. 1 представлена принципиальная схема заявляемого опорно-поворотного устройства по азимуту и углу места с агрегатированными двигателями.
На фиг. 2 представлена принципиальная схема заявленного устройства со стандартным двигателем привода азимутального вала расположенным на неподвижном основании, и двигателем привода полого элемента, расположенным на поворотной платформе.
На фиг. 3 представлена принципиальная схема заявленного устройства, с двигателем привода полого элемента, связанным с полым элементом через универсальный шарнир.
Опорно-поворотное устройство по азимуту и углу места (фиг. 1,) содержит неподвижный фланец 1, на котором с помощью подшипника 2 смонтирован азимутальный вал 3. Двигатель 4 является агрегатированным с азимутальным валом 3. Обмотка двигателя 4 также как и подшипник 2 располагаются внутри азимутального вала 3. Опорная поверхность 5 азимутального вала 3 расположена под углом к его оси АА1. На опорной поверхности 5 азимутального вала с помощью подшипника 6 посажен полый элемент 7. На другом торце полого элемента 7, с помощью подшипника 8, посажена поворотная платформа 9. Плоскости расположения подшипников 6 и 8 наклонены друг к другу, а их оси соответственно OO1 и CC1 пересекаются. Углы наклона поверхностей расположения подшипников 6 и 8 определяются требуемыми углами наклона поворотной платформы. В точке пересечения осей OO1 и СС1 размешен угловой шарнир 10, связывающий поворотную платформу 9 с неподвижным фланцем 1. Шарнир предотвращает вращение поворотной платформы 9 вокруг собственной оси, но позволяет ей совершать колебательные движения относительно точки пересечения осей СС1 и OO1. Двигатель 11 является агрегатированным с полым элементом 7. При этом статором двигателя 11 является поворотная платформа 9, которая угловым шарниром 10 зафиксирована от вращения вокруг собственной оси, а ротором является участок полого элемента, внутри которого расположена обмотка двигателя 11. Обмотки двигателей 4, 11 и подшипники 6, 8 могут располагаться, как внутри азимутального вала 3 и полого элемента 7 (см. фиг. 1), так и снаружи. Выбор расположения определяется требованиями к габаритам устройства и мощности привода.
В опорно-поворотном устройстве на фиг. 2 используются стандартные двигатели, что снижает стоимость устройства в целом. Двигатель 12 привода азимутального вала 3 расположен на неподвижном фланце 1. Шестерня 13 на валу двигателя 12 взаимодействует с зубчатым колесом 14 на азимутальном валу 3. Двигатель 15, привода полого элемента 7, расположен на поворотной платформе 9. Шестерня 16 на валу двигателя 15 взаимодействует с зубчатым колесом 17 на полом элементе 7.
Опорно-поворотное устройство на фиг. 3 имеет меньшую инерционную массу поворотной платформы 9, так как привод полого элемента 7 базируется не на ней, а на неподвижном фланце 1. Для этого на неподвижном фланце 1 с помощью подшипника 20 смонтирован первый вал универсального шарнира 19. С этим валом универсального шарнира 19 агрегатирован двигатель 18. Вторым валом универсального шарнира 19 является полый элемент 7. В этой конструкции могут также использоваться стандартные двигатели, которые будут располагаться на неподвижном фланце и взаимодействовать с азимутальным валом и универсальным шарниром через зубчатые передачи (на фигурах этот вариант не показан). Выбор вида двигателя и его расположения определяются требованиями к себестоимости конструкции, к габаритам устройства и к мощности приводов.
Рассмотрим работу предлагаемого устройства при работе приводов раздельно. При работе только двигателя 4 (см. фиг. 1) вращается азимутальный вал 3 вокруг оси АА1. Полый элемент 7 установленный в подшипнике 6 не может вращаться относительно его оси OO1, так как этому вращению препятствует двигатель 11. Поэтому полый элемент 7 вращается совместно с азимутальным валом вокруг оси АА1. При этом ось СС1 подшипника 8, расположенного под углом к оси вращения вала 3 совершает прецессирующее движение вокруг оси АА1, а поворотная платформа 9, посаженная на подшипнике 8 совершает поворот по азимуту под фиксированным углом места. При этом за счет углового шарнира 10, поворотная платформа 9 остается неподвижной относительно собственной оси СС1. Центр углового шарнира для этого должен совпадать с точкой пересечения осей OO1 и СС1.
При включении двигателя 11 азимутальный вал 3 остается неподвижным, так как тормозится выключенным двигателем 4. Двигатель 11 пытается повернуть полый элемент 7 вокруг оси СС1. Но так как этот элемент посажен в подшипнике 6, ось вращения OO1 которого пересекается с осью вращается СС1, то в результате ось СС1 совершает прецессирующее движение относительно оси OO1, а подшипник 8 вместе с поворотной платформой 9 в системе координат, связанной с неподвижным фланцем 1, совершает сложное смещение по азимуту и углу места. Угол прецессии оси СС1 определяется углом наклона подшипников 6 и 8 друг к другу.
При одновременной работе двигателей 4 и 11 вращение азимутального вала 3 и полого элемента 7 ось подшипника 8 и базирующейся на нем поворотной платформы 9 совершает в пространстве сложную траекторию. Подбором скорости и направления вращения двигателей 4 и 11 можно достичь требуемой точки пространства кратчайшим путем.
Работа опорно-поворотного устройства по азимуту и углу места на фиг. 2 аналогична работе опорно-поворотного устройства по азимуту и углу места на фиг. 1, только взаимодействие двигателей с азимутальным валом 3 и полым элементом 7 осуществляется через зубчатые пары 13-14 и 16-17.
В опорно-поворотном устройстве по азимуту и углу места на фиг. 3 при работе двигателя 4 азимутальный вал 3 вращается вокруг оси АА1. При этом плоскость наклонного к оси АА1 подшипника 6 также вращается вокруг этой оси. Полый элемент 7, связан через универсальный шарнир 19 с двигателем 18. Двигатель 18 не позволяет вращаться первому валу универсального шарнира 19 вокруг оси АА1. Полый элемент 7, являющийся одновременно вторым валом универсального шарнира 19 взаимодействуя с наклонным подшипником 6 совершает прецессирующее движение относительно оси OO1. Подшипник 8 вместе с поворотной платформой 9 совершает при этом сложное пространственное движение по азимуту и углу места. При работе только двигателя 18 вращается первый вал универсального шарнира 19 вокруг оси АА1. Второй вал - полый элемент 7 вращается при этом вокруг оси OO1. Азимутальный вал 3 остается неподвижным. Также как и в работе устройства на фиг. 1 ось СС1 наклонного подшипника 8 совершает прецессирующее движение вокруг оси OO1 и поворотная платформа 9 в системе координат, связанной с неподвижным фланцем будет совершать смещение по азимуту и углу места. Работа опорно-поворотного устройства по азимуту и углу места при одновременном включении двигателей 4 и 11 аналогична работе опорно-поворотного устройства на фиг. 1.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО | 2008 |
|
RU2359372C1 |
| Опорно-поворотное устройство | 2016 |
|
RU2634333C1 |
| Опорно-поворотное устройство антенны | 2017 |
|
RU2659181C1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ АНТЕННЫ ПО АЗИМУТУ И УГЛУ МЕСТА | 1990 |
|
RU2020666C1 |
| Способ управления лазерным лучом | 2016 |
|
RU2639609C2 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО | 2000 |
|
RU2187137C2 |
| Способ управления лазерным лучом | 2019 |
|
RU2701793C1 |
| ЭКСЦЕНТРИКОВЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР С ПРЕДВАРИТЕЛЬНОЙ СТУПЕНЬЮ | 2007 |
|
RU2338103C1 |
| СПОСОБ СЛЕЖЕНИЯ ПРЕИМУЩЕСТВЕННО ТЕЛЕСКОПА ЗА ПОДВИЖНЫМ ОБЪЕКТОМ | 2013 |
|
RU2546054C1 |
| Способ непрерывного воздействия лазерным лучом на неупорядоченно движущийся объект | 2024 |
|
RU2822970C1 |



Опорно поворотное устройство по азимуту и углу места относится к машиностроению и может быть использовано для привода антенн, телекамер и других объектов пространственного ориентирования по азимуту и углу места. Изобретение содержит неподвижный фланец (1), на котором с помощью подшипника (2) смонтирован азимутальный вал (3). На опорной поверхности (5), которая расположена под углом к оси АА1, с помощью подшипника (6) посажен полый элемент (7). На другом торце полого элемента (7), с помощью подшипника (8), посажена поворотная платформа (9). Плоскости расположения подшипников (6) и (8) наклонены друг к другу, а их оси соответственно OO1 и СС1 пересекаются. В точке пересечения осей OO1 и СС1 размещен угловой шарнир (10), связывающий поворотную платформу (9) и неподвижный фланец (1). Выбор расположения и конструкционная особенность двигателей определяются себестоимостью, массогабаритными требованиями и мощностью привода. Технический результат заключается в упрощении конструкции и уменьшении массогабаритных характеристик устройства, а также возможности использовать любые средства связи для элементов, смонтированных на поворотной платформе. 3 з.п. ф-лы, 3 ил.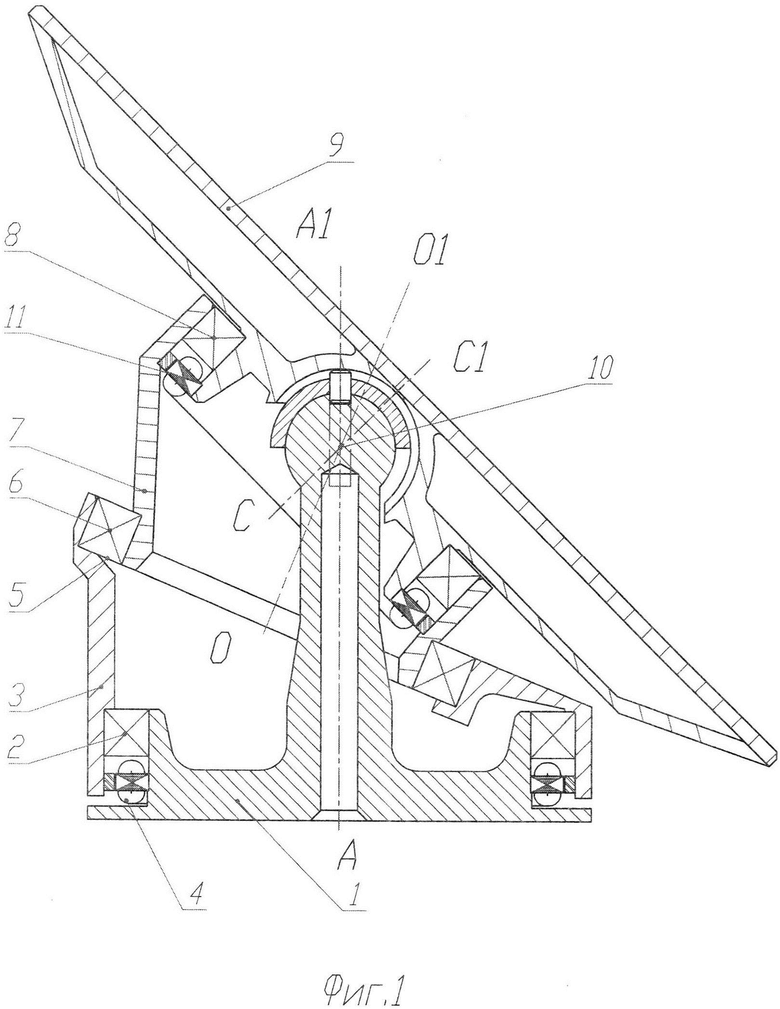
1. Опорно-поворотное устройство по азимуту и углу места, содержащее два привода, поворотную платформу и неподвижный фланец, на котором с возможностью вращения смонтирован полый азимутальный вал, связанный с одним из приводов, отличающееся тем, что полый азимутальный вал имеет опорную поверхность, расположенную под углом к его оси, на азимутальный вал посажен с помощью подшипника полый элемент, связанный с другим приводом, на другом торце полого элемента с помощью подшипника посажена поворотная платформа, причем плоскости расположения подшипников наклонены друг к другу, а их оси пересекаются, в точке пересечения осей подшипников размещен угловой шарнир, связывающий поворотную платформу с неподвижным фланцем.
2. Опорно-поворотное устройство по п. 1, отличающееся тем, что двигатели обоих приводов агрегатированы с валом и полым элементом, которые являются роторами двигателей.
3. Опорно-поворотное устройство по п. 1, отличающееся тем, что двигатель азимутального вала расположен на неподвижном фланце, а двигатель второго привода расположен на поворотной платформе и передача вращения от них осуществляется зубчатыми парами.
4. Опорно-поворотное устройство по п. 1, отличающееся тем, что полый элемент связан с двигателем второго привода через универсальный шарнир.
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ АНТЕННЫ ПО АЗИМУТУ И УГЛУ МЕСТА | 1990 |
|
RU2020666C1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| ПОВОРОТНОЕ УСТРОЙСТВО ДЛЯ ПРИЕМОПЕРЕДАЮЩЕЙ АНТЕННЫ | 2003 |
|
RU2255395C2 |
| JP 2013117388 A, 13.06.2013 | |||
| JP 7249918 A, 26.09.1995 | |||
| Поворотное устройство антенны | 1984 |
|
SU1218433A1 |

