Изобретение относится к ракетной технике и может быть использовано в переносных зенитных ракетных комплексах.
Известна зенитная управляемая ракета (ЗУР) 9М39 «Игла» [см. Переносный зенитный ракетный комплекс «Игла». Техническое описание. - М.: Военное издательство. - 1987 г.], содержащая оптическую головку самонаведения с двухканальным спектральным селектором цели, оптико-электронный следящий гирокоординатор с двумя каналами спектроделения оптического излучения и двумя фотоприемниками, импульсные усилители с однократным дифференцированием, пиковые детекторы и схему сравнения напряжений с выходов пиковых детекторов.
Задача спектральной селекции инфракрасного излучения поражаемых целей, ложных тепловых целей, фоновых помех и защита от них в ЗУР 9М39 «Игла» решается путем избирательного двухканального приема инфракрасного излучения поражаемых целей и помех.
Физическими основами пассивной оптической локации является то, что все тела, температура которых выше абсолютного нуля, излучают электромагнитные волны в оптическом диапазоне, делящимся на:
- инфракрасное излучение с длиной волны от 1000 мкм до 0,78 мкм;
- видимое излучение с длиной волны от 0,78 мкм до 0,4 мкм;
- ультрафиолетовое излучение с длиной волны от 0,4 мкм до 0,001 мкм.
При построении приемных устройств для инфракрасного излучения, используемых в ОГС, в объективах создаются входные спектральные полосовые фильтры. Использование таких фильтров позволяет выделить из всего потока лучистой энергии только инфракрасное излучение целей и помех, с образованием в приемном устройстве двух спектральных каналов: основного (ОК) в среднем инфракрасном диапазоне - для поражаемых целей, и вспомогательного (ВК) в ближнем инфракрасном диапазоне - для помех. Сравнение уровней сигналов основного и вспомогательного каналов позволяет выстроить логику спектральной селекции целей и защиты от пиротехнических ложных тепловых целей по нижеприведенным принципам:
ВК/ОК<1 - цель, ВК/ОК ≈ 1 - фон, ВК/ОК>1 - ложная тепловая цель.
Применение такого двухканального спектрального селектора цели в ЗУР 9М39 «Игла» позволяет эффективно бороться с пиротехническими ложными тепловыми целями, температура горения которых превышает 1700 К. Однако в настоящее время разработаны и приняты на вооружение ряда стран мира новые типы ложных тепловых целей:
- мультиспектральные, излучение которых в ближнем и среднем инфракрасных диапазонах имеет монотонный характер без ярко выраженного максимума в ближнем инфракрасном диапазоне;
- пирофорные, температура горения которых соответствует спектральному максимуму целевых источников (500 К), при этом в пространстве создается целое облако, представляющее для ОГС размерный источник излучения.
Применение указанных выше типов помех может приводить к перенацеливанию ЗУР 9М39 «Игла» на помеховый источник (перехвату помехи) и выпадению из поля зрения ОГС целевого источника излучения, что, в конечном итоге, сказывается на повышенных промахах ЗУР при стрельбе по воздушным целям.
В целях повышения помехозащищенности ЗУР от применения известных современных типов помех, как отстреливаемых, так и размещаемых на самой воздушной цели (импульсные модулированные помехи и помехи типа «бегущий огонь») разработчики ОГС идут по пути применения гирокоординаторов с увеличенным числом спектральных поддиапазонов принимаемого излучения и увеличенным количеством фото приемников в каждом из поддиапазонов. При этом увеличение числа спектральных поддиапазонов повышает информативность о принимаемой фоноцелевой обстановке, а использование многоплощадочных фотоприемников повышает пространственное разрешение целей и помех в поле зрения ОГС.
Известна ЗУР 9М336 «Верба» [см. описание к патенту РФ №2612650], содержащая оптическую головку самонаведения с трехканальным спектральным селектором цели, оптико-электронный следящий гирокоординатор с тремя каналами спектроделения (ближний и средний инфракрасные диапазоны, а также ультрафиолетовый диапазон) оптического излучения, три пиковых детектора и схему сравнения трех напряжений с их выходов.
Помимо этого в ОГС современных ЗУР используется цифровая обработка сигналов, принимаемых электронным блоком и преобразуемых посредством аналого-цифровых преобразователей в цифровую форму (последовательность нулей и единиц, называемых «двоичным кодом»). Алгоритмы и принципы цифровой обработки сигналов, в отличии от аналоговой, позволяют получать высокую стабильность результатов обработки с меньшей степенью зависимости от изменяющихся внешних условий работы аппаратуры, однако требуют применения специализированных вычислительных аппаратных средств и систем, таких, как процессоры цифровой обработки сигналов.
Совокупность признаков, наиболее близкая к совокупности существенных признаков заявляемого изобретения, присуща известному изобретению (см. патент РФ №2612650), применяемому в ЗУР с ОГС, в связи с чем оно может быть принято за прототип.
Прототип содержит оптико-электронный следящий гирокоординатор с тремя каналами спектроделения оптического излучения, тремя фотоприемниками, тремя импульсными усилителями с однократным дифференцированием, выходы которых подключены к амплитудным детекторам, а выходы детекторов к схеме сравнения уровней, или вычислителям отношений уровней, а выходы схемы сравнения, или вычислителей отношений - к схеме определения и формирования "стробов" принадлежности сигналов цели или помехе. При этом в каждый канал введены последовательно соединенные корректоры сигналов в виде дифференцирующего устройства второго дифференцирования и бинарного квантователя, управляемые кодом делители напряжений, компараторы и анализаторы с переменными логическими переключательными функциями. Также введен задатчик коэффициентов деления делителей и логических функций анализаторов, причем первый выход задатчика подключен к входу управления делителей, а второй - к входу задания логических функций анализаторов.
Прототип обладает следующими недостатками:
Применение ракет с ОГС, в которых используются сигналы только от одного фотоприемника в каждом из спектральных диапазонов (OK, ВК1 и ВК2) может приводить к промахам при стрельбе, так как не позволяет однозначно оценивать амплитуду принимаемого сигнала в зависимости от рассогласования от центра поля зрения ввиду особенностей формирования пятна (изображения источника излучения) в оптической системе ОГС. Это связано с тем, что на краю и в центре поля зрения имеет место уменьшение реальной амплитуды сигнала. При этом могут нарушаться значения соотношений сигналов в разных спектральных диапазонах, что приведет к неверной работе схемы определения и формирования "стробов" принадлежности сигналов цели или помехе.
Кроме того применение ЗУР с ОГС, использующей только лишь спектральный селектор для выделения цели на фоне естественных и искусственных помех, в условиях применения воздушной целью современных типов комбинированных помех (низкотемпературных, пирофорных и мультиспектральных) не позволяет обеспечить достаточно эффективную селекцию и может приводить к промахам при стрельбе ЗУР из-за слабого различия цели и помехи по спектральному признаку и более высокой интенсивности излучения помехи или ее размерности (для пирофорных помех).
Также предлагаемая в прототипе реализация ракеты с аппаратной адаптацией путем оперативного введения данных о характеристиках цели перед пуском ЗУР по информации, поступающей от командного пункта целеуказания, управления огнем и распределения целей в современных условиях ведения боевых действий приведет к недопустимым временным потерям, что особенно критично для переносных зенитных ракетных комплексов, работающих на малых дальностях. Результатом введения такого решения будет невозможность осуществления своевременного пуска и, как следствие, отсутствие поражения воздушной цели.
Техническим результатом настоящего изобретения является значительное повышение вероятности попадания ракеты в цель в условиях сложной помехофоноцелевой обстановки и организованного оптического противодействия, а также сокращение временных потерь при прицеливании и пуске ракеты.
Технический результат изобретения обеспечивается тем, что малогабаритная зенитная управляемая ракета содержит датчик крена, рулевой привод и трехспектральную многоплощадочную оптическую головку самонаведения, состоящую из оптико-электронного следящего гирокоординатора с тремя каналами спектроделения оптического излучения, при этом оптико-электронный следящий гирокоординатор содержит обмотку управления ориентацией, а также последовательно соединенные фотоприемник и импульсный усилитель с однократным дифференцированием в основном и вспомогательном каналах, фотоприемник в ультрафиолетовом канале. В трехспектральную многоплощадочную оптическую головку самонаведения дополнительно введен электронный блок, содержащий программируемую логическую интегральную схему и многоядерный процессор цифровой обработки сигналов, реализующие адаптивные алгоритмы выделения цели на фоне естественных и искусственных помех по совокупности амплитудных, спектральных и траекторных признаков, аналого-цифровой преобразователь, цифро-аналоговый преобразователь, а в оптико-электронный следящий гирокоординатор дополнительно введен аналоговый коммутатор, в основной и вспомогательный каналы введены по два фотоприемника и импульсных усилителя с однократным дифференцированием, при этом каждый фотоприемник соединен последовательно со своим импульсным усилителем, выходы которых соединены с входами аналогового коммутатора, а в ультрафиолетовый канал дополнительно введены два фотоприемника, причем выходы трех фотоприемников ультрафиолетового канала соединены с входами аналогового коммутатора, выход которого соединен с первым входом аналого-цифрового преобразователя, при этом первый выход программируемой логической интегральной схемы соединен с входом управления аналого-цифрового преобразователя, второй выход - с входом управления аналогового коммутатора, а третий и четвертый выходы - с первым и вторым входами управления цифро-аналогового преобразователя, первый выход которого соединен с входом обмотки управления ориентацией оптико-электронного следящего гирокоординатора, а второй выход - с входом рулевого привода, многоядерный процессор цифровой обработки сигналов включает блок обнаружения полезных сигналов, блок классификатора, блок запоминания и отслеживания параметров целевого сигнала, блок адаптивного селектора и блок формирования управляющих сигналов, связанные между собой внутрипроцессорными цифровыми потоками данных, при этом выход аналого-цифрового преобразователя соединен с входом многоядерного процессора цифровой обработки сигналов по параллельному каналу информационного обмена, который является входом блока обнаружения полезных сигналов, первый выход которого соединен с первым входом блока запоминания и отслеживания параметров целевого сигнала, а второй выход - с входом блока классификатора, первый выход которого соединен со вторым входом блока запоминания и отслеживания параметров целевого сигнала, а второй выход - с первым входом блока адаптивного селектора, второй вход которого соединен с выходом блока запоминания и отслеживания параметров целевого сигнала, выход блока адаптивного селектора соединен с входом блока формирования управляющих сигналов, выход которого является выходом многоядерного процессора цифровой обработки сигналов, который по параллельному каналу информационного обмена соединен со вторым входом программируемой логической интегральной схемы, первый вход которой соединен с выходом датчика крена.
В частном случае, связанном с соединением выхода аналого-цифрового преобразователя с входом многоядерного процессора цифровой обработки сигналов, данное соединение может быть выполнено по тридцатидвухразрядному параллельному каналу информационного обмена.
Соединение выхода многоядерного процессора цифровой обработки сигналов со вторым входом программируемой логической интегральной схемы может быть выполнено по шестнадцатиразрядному параллельному каналу информационного обмена.
В частном случае, связанном с цифро-аналоговым преобразователем, цифро-аналоговый преобразователь выполнен двухканальным.
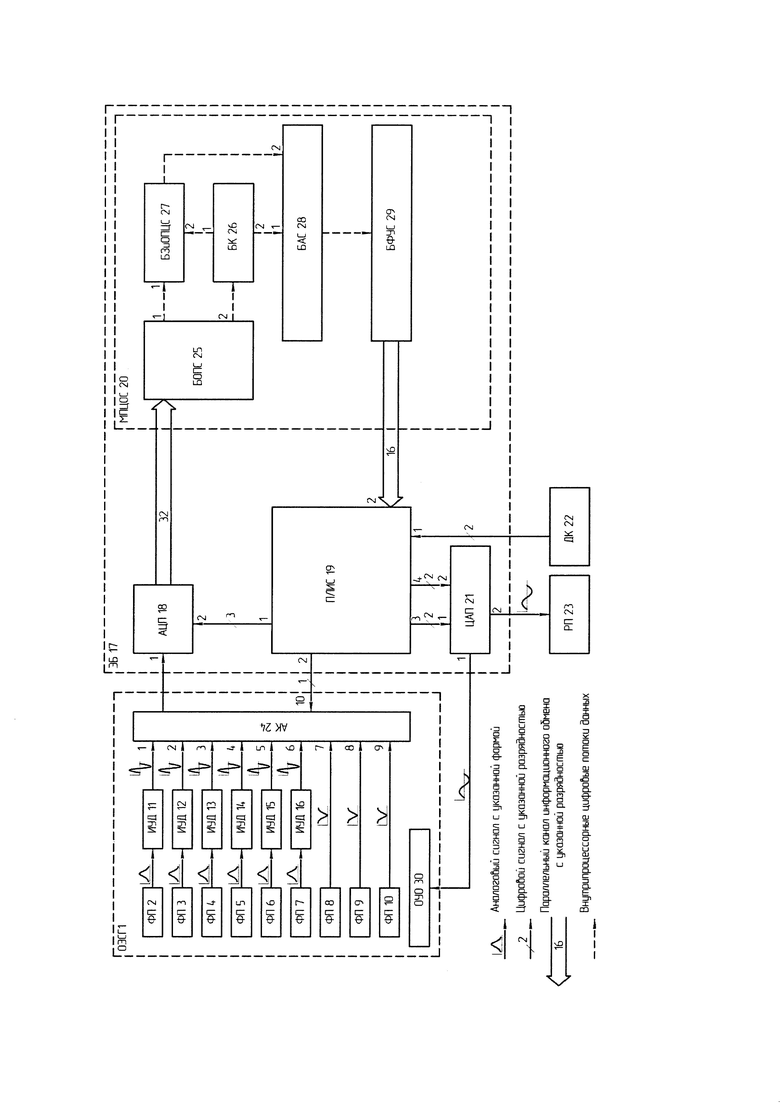
Изобретение поясняется чертежом, на котором приведена структура основных элементов предлагаемой малогабаритной ЗУР с трехспектральной многоплощадочной ОГС и функциональное взаимодействие ее составных частей, а также состав программных блоков адаптивных алгоритмов выделения цели на фоне естественных и искусственных помех, реализованных в многоядерном процессоре цифровой обработки сигналов.
На чертеже приняты следующие обозначения:
1 - оптико-электронный следящий гирокоординатор (ОЭСГ);
2, 3, 4 - фото приемники основного канала среднего инфракрасного диапазона (ФП);
5, 6, 7 - фото приемники вспомогательного канала ближнего инфракрасного диапазона (ФП);
8, 9, 10 - фотоприемники ультрафиолетового канала (ФП);
11, 12, 13 - импульсные усилители с однократным дифференцированием для фотоприемников основного канала (ИУД);
14, 15, 16 - импульсные усилители с однократным дифференцированием для фотоприемников вспомогательного канала (ИУД);
17 - электронный блок (ЭБ);
18 -аналого-цифровой преобразователь (АЦП);
19 - программируемая логическая интегральная схема (ПЛИС);
20 - многоядерный процессор цифровой обработки сигналов (МПЦОС);
21 - цифро-аналоговый преобразователь (ЦАП);
22 - датчик крена (ДК);
23 - рулевой привод (РП);
24 - аналоговый коммутатор (АК);
25 - блок обнаружения полезных сигналов (БОПС);
26 - блок классификатора (БК);
27 - блок запоминания и отслеживания параметров целевого сигнала (БЗиОПЦС);
28 - блок адаптивного селектора (БАС);
29 - блок формирования управляющих сигналов (БФУС);
30 - обмотка управления ориентацией оптико-электронного следящего гирокоординатора (ОУО).
Оптическая головка самонаведения малогабаритной ЗУР включает в себя оптико-электронный следящий гирокоординатор 1 и электронный блок 17 и предназначена для слежения за целевым источником при подготовке к пуску и при полете ракеты, измерения угловой скорости линии визирования ракета-цель и формирования сигнала наведения ракеты, пропорционального величине измеренной угловой скорости.
Оптико-электронный следящий гирокоординатор 1 из состава оптической головки самонаведения предназначен для приема оптического излучения фоноцелевой обстановки с помощью входящего в его состав трехспектрального (ближний инфракрасный и средний инфракрасный диапазоны и ультрафиолетовый диапазон) многоплощадочного фотоприемника.
Электронный блок 17 предназначен для приема и обработки сигналов фотоприемников, поступающих с выхода аналогового коммутатора 24, и формирования сигналов управления ориентацией в пространстве гироскопа оптико-электронного следящего гирокоординатора 1 и управления работой рулевого привода 23 и содержит аналого-цифровой преобразователь 18, программируемую логическую интегральную схему 19, многоядерный процессор цифровой обработки сигналов 20 и цифро-аналоговый преобразователь 21.
Многоплощадочный фотоприемник состоит из девяти отдельных фотоприемников 2, 3, 4, 5, 6, 7, 8, 9, 10, которые используются для преобразования оптического излучения в электрический сигнал. При этом фотоприемники 2, 3, 4 имеют максимум чувствительности в среднем инфракрасном диапазоне, фотоприемники 5, 6, 7 имеют максимум чувствительности в ближнем инфракрасном диапазоне, а фото приемники 8, 9, 10 - в ультрафиолетовом диапазоне. Выходы фотоприемников 2, 3, 4, 5, 6, 7 соединены с входами соответствующих импульсных усилителей с однократным дифференцированием 11, 12, 13, 14, 15, 16, которые обеспечивают предварительное усиление выходного сигнала фотоприемников, подавление постоянной составляющей и выделение целевого сигнала.
Аналоговый коммутатор 24 предназначен для последовательной коммутации сигналов, поступающих с выходов импульсных усилителей с однократным дифференцированием 11, 12, 13, 14, 15, 16 и с выходов фотоприемников 8, 9, 10 на его с первого по девятый входы. Выход аналогового коммутатора 24 соединен с первым входом аналого-цифрового преобразователя 18. Десятый вход аналогового коммутатора 24 является цифровым входом управления, который соединен со вторым выходом программируемой логической интегральной схемы 19, с которой передаются тактовые импульсы, обеспечивающие последовательную коммутацию всех информационных входов аналогового коммутатора 24 на его выход.
Аналого-цифровой преобразователь 18 предназначен для приема аналоговых сигналов, подаваемых на его первый вход, и их преобразования в цифровую форму в виде двоичного кода и последующей передачи информации на вход многоядерного процессора цифровой обработки сигналов 20. Второй вход аналого-цифрового преобразователя 18 является цифровым входом управления и соединен с первым выходом программируемой логической интегральной схемы 19. Аналого-цифровой преобразователь 18 может быть построен на базе микросхем с частотой оцифровки входного сигнала порядка 20 МГц и имеющих в своем составе буферную память, обеспечивающую накопление принятых отсчетов и их последующую выдачу по параллельному каналу информационного обмена.
Многоядерный процессор цифровой обработки сигналов 20 и программируемая логическая интегральная схема 19 образуют высокопроизводительную вычислительную систему, реализующую адаптивные алгоритмы выделения цели на фоне естественных и искусственных помех по совокупности амплитудных, спектральных и траекторных признаков. При этом вход многоядерного процессора цифровой обработки сигналов 20 посредством тридцатидвухразрядного канала информационного обмена соединен с аналого-цифровым преобразователем 18, а его выход - со вторым входом программируемой логической интегральной схемы 19 посредством шестнадцатиразрядного канала информационного обмена.
В составе многоядерного процессора цифровой обработки сигналов 20 реализованы: блок обнаружения полезных сигналов 25, на вход которого с выхода аналого-цифрового преобразователя 18 подаются оцифрованные входные данные, а первый выход которого соединен с первым входом блока запоминания и отслеживания параметров целевого сигнала 27, а второй выход - с входом блока классификатора 26. На первый вход блока запоминания и отслеживания параметров целевого сигнала 27 поступает информация об обнаруженных целевых сигналах, а на второй вход - информация о параметрах сигналов, прошедших классификацию. На вход блока классификатора 26 поступает информация о параметрах обнаруженных сигналов, со второго выхода которого сигналы, прошедшие классификацию, поступают на первый вход блока адаптивного селектора 28. На второй вход блока адаптивного селектора 28 поступает информация с выхода блока запоминания и отслеживания параметров целевого сигнала 27 о параметрах сигнала, принятого в качестве целевого. Блок формирования управляющего сигнала 29 на основании информации, поступившей на его вход с выхода блока адаптивного селектора 28 обеспечивает формирование сигналов управления ориентацией оптико-электронного следящего гирокоординатора 1 и сигналов управления рулевым приводом 23 ракеты, которые посредством шестнадцатиразрядного параллельного канала информационного обмена подключены на второй вход программируемой логической интегральной схемы 19.
Цифро-аналоговый преобразователь 21, который может быть построен на базе известных микросхем, обеспечивает прием цифровых сигналов управления ориентацией оптико-электронного следящего гирокоординатора 1 и рулевым приводом 23 ракеты, которые в форме двоичного кода поступают на первый и второй его входы с третьего и четвертого выхода программируемой логической интегральной схемы 19 соответственно, и формирование на первом его выходе аналогового сигнала слежения за целевым источником, подключаемого на вход обмотки управления ориентацией оптико-электронного следящего гирокоординатора 30, а на втором выходе - аналогового сигнала управления наведением ЗУР, подключаемого на вход рулевого привода 23.
Для формирования указанных сигналов слежения за целевым источником и управления наведением ЗУР на частоте вращения гироскопа и на частоте вращения ракеты соответственно, используется датчик крена 22, позволяющий однозначно определить текущий угол проворота ракеты вокруг продольной оси (угол крена) и построенный на базе механического гироскопа, модулирующего диска и оптопары. На выходе датчика крена формируются цифровые импульсные сигналы (128 импульсов на оборот и 1 импульс на оборот), которые поступают на первый вход программируемой логической интегральной схемы 19 для обработки и вычисления угла крена ракеты.
Обмотка управления ориентацией оптико-электронного следящего гирокоординатора 30 представляет собой электромеханическую систему, обеспечивающую взаимодействие с магнитным ротором гироскопа посредством создаваемого протекающим в ней током магнитного поля, что позволяет управлять отклонением ротора гироскопа в требуемом направлении по сигналам управления, поступающим на ее вход с первого выхода цифро-аналогового преобразователя 21.
Рулевой привод 23 построен с применением электрической машинки и обеспечивает преобразование поступившего на его вход управляющего сигнала со второго выхода цифро-аналогового преобразователя 21 в механическое отклонение рулевых пластин ракеты.
Функционирование адаптивных алгоритмов выделения цели на фоне естественных и искусственных помех происходит следующим образом. После преобразования входных аналоговых сигналов фотоприемников 2, 3, 4, 5, 6, 7, 8, 9, 10 в цифровое представление на основе априорно известных параметров оптико-электронного тракта ОГС (таких как топология фотоприемников, их размещение и ориентация в фокальной плоскости оптико-электронного следящего гирокоординатора 1, качественные характеристики оптического тракта, а также амплитудно-частотные характеристики импульсных усилителей с однократным дифференцированием) блоком обнаружения полезных сигналов 25 производится фильтрация и выделение сигналов в каждом спектральном диапазоне на каждой площадке фотоприемника по временным, амплитудным и контрастным параметрам, которые характерны для источников излучения в том или ином спектральном диапазоне.
Со второго выхода блока обнаружения полезных сигналов 25 параметры обнаруженных сигналов подаются на вход блока классификатора 26, где происходит сопоставление сигналов, полученных в разных спектральных диапазонах с соответствующей фазой и их привязка друг к другу с одновременной классификацией на целевые, целеподобные, помехоподобные и помеховые источники. Для осуществления классификации сигналы подразделяются на подмножества, характеризующиеся спектральными, частотными и амплитудными признаками. Анализ совокупности указанных признаков для каждого обнаруженного сигнала позволяет отнести его к конкретному подмножеству. Среди этих источников выделяется один целевой (исходя из допущения, что при прицеливании и подготовке к пуску оператор ПЗРК сопровождает именно воздушную цель, по которой производится пуск ракеты), которому назначается наибольший приоритет. В дальнейшем по этому сигналу работает блок запоминания и отслеживания параметров целевого сигнала 27, который сопоставляет все вновь обнаруженные сигналы, поступившие на его первый вход с первого выхода блока обнаружения полезных сигналов 25, и прошедшие классификацию сигналы, поступившие на его второй вход с первого выхода блока классификатора 26 с «эталонным», и производит обновление информации о целевом сигнале на основе полученных данных.
Блок адаптивного селектора 28 на основе данных, полученных от блока классификатора 26, поступающих на его первый вход, и блока запоминания и отслеживания параметров целевого сигнала 27, поступающих на его второй вход, производит ранжирование всех обнаруженных источников в поле зрения ОГС в зависимости от совокупности их амплитудных, спектральных и траекторных признаков и сравнения этих параметров с параметрами отслеживаемого целевого сигнала. При этом ранг обнаруженных источников уменьшается с увеличением количества отличий параметров данного конкретного источника от эталонного (отслеживаемого целевого сигнала).
Блок формирования управляющего сигнала 29 на основании данных, полученных от блока адаптивного селектора 28, формирует сигнал управления ориентацией оптико-электронного следящего гирокоординатора 1, который представляет собой векторную сумму сигналов от каждого из обнаруженных и классифицированных сигналов, умноженную на весовой коэффициент, определенный рангом сигнала, назначенным в блоке адаптивного селектора 28. Сигнал управления ориентацией оптико-электронного следящего гирокоординатора 1 формируется на частоте вращения гироскопа. Такой подход позволяет обеспечить более плавное управление следящей системой при наличии в поле зрения ОГС множественных источников излучения и снижает колебательный характер слежения, уменьшая вероятность выпадения из поля зрения «целевого» источника. Кроме того, в блоке формирования управляющего сигнала 29 обеспечивается формирование сигнала управления рулевым приводом 23 ракеты, пропорционального сигналу управления ориентацией оптико-электронного следящего гирокоординатора 1. Далее сформированные сигналы управления ориентацией оптико-электронного следящего гирокоординатора 1 и управления рулевым приводом 23 посредством шестнадцатиразрядного параллельного канала информационного обмена поступают на второй вход программируемой логической интегральной схемы 19, где преобразуются в двоичную последовательность и передаются на первый и второй входы цифро-аналогового преобразователя 21, первый выход которого соединен с обмоткой управления ориентацией оптико-электронного следящего гирокоординатора 30, а второй - с входом рулевого привода 23, обеспечивая формирование управляющего сигнала на аэродинамические органы управления ЗУР.
Таким образом, технический результат достигается за счет использования трехспектральной многоплощадочной ОГС, применения современной высокопроизводительной элементной базы с использованием цифровой обработки сигналов, а также разработки и внедрения более совершенных комбинированных алгоритмов выделения целевых сигналов на основе комплексного адаптивного анализа амплитудных, спектральных и траекторных признаков в процессе подготовки к пуску и полета ракеты. При этом запоминание параметров целевого сигнала происходит автоматически в процессе прицеливания и подготовки к пуску ракеты и не требует ручного ввода информации о целевом источнике, что, в сравнении с прототипом, позволяет дополнительно сократить временные потери на подготовку к пуску ракеты и повышает вероятность поражения цели.
Предлагаемое изобретение может быть осуществлено на базе малогабаритной ЗУР 9М336, что позволит значительно повысить характеристики помехозащищенности ЗУР от современных типов комбинированных помех и, соответственно, уменьшить величину возможных промахов и повысить вероятность поражения воздушных целей.
Эффективность предлагаемого технического решения подтверждена результатами натурных стрельбовых испытаний малогабаритной ракеты.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНЫЙ ЦИФРОВОЙ СПЕКТРАЛЬНЫЙ СЕЛЕКТОР ЦЕЛИ | 2015 |
|
RU2612650C2 |
| СПОСОБ АДАПТИВНОЙ СПЕКТРАЛЬНОЙ СЕЛЕКЦИИ ЦЕЛЕЙ | 2015 |
|
RU2601284C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЗАХВАТОМ ЦЕЛИ И ПУСКОМ РАКЕТЫ | 2013 |
|
RU2554272C2 |
| ОПТИКО-ЭЛЕКТРОННЫЙ СЛЕДЯЩИЙ КООРДИНАТОР | 2011 |
|
RU2476826C1 |
| ЛАЗЕРНАЯ ПОЛУАКТИВНАЯ ГОЛОВКА САМОНАВЕДЕНИЯ | 2011 |
|
RU2476815C1 |
| ЛАЗЕРНАЯ ПОЛУАКТИВНАЯ ГОЛОВКА САМОНАВЕДЕНИЯ | 2010 |
|
RU2439477C1 |
| ЗЕНИТНАЯ САМОХОДНАЯ УСТАНОВКА | 2007 |
|
RU2348890C2 |
| Модуль управления параметрами помехового сигнала | 2025 |
|
RU2840341C1 |
| ГОЛОВКА САМОНАВЕДЕНИЯ | 2009 |
|
RU2415375C1 |
| ТЕПЛОВАЯ ГОЛОВКА САМОНАВЕДЕНИЯ РАКЕТЫ, НЕЧУВСТВИТЕЛЬНАЯ К ГЕНЕРАТОРАМ ИНФРАКРАСНЫХ ПУЛЬСИРУЮЩИХ ПОМЕХ | 2010 |
|
RU2419060C2 |
Изобретение относится к ракетной технике и может быть использовано в переносных зенитных ракетных комплексах. Технический результат - повышение вероятности попадания ракеты в цель в условиях сложной помехофоноцелевой обстановки и организованного оптического противодействия, а также сокращение временных потерь при прицеливании и пуске ракеты. Малогабаритная зенитная управляемая ракета содержит датчик крена, рулевой привод и трехспектральную многоплощадочную оптическую головку самонаведения. Эта головка состоит из оптико-электронного следящего гирокоординатора с тремя каналами спектроделения оптического излучения и электронного блока. Электронный блок содержит программируемую логическую интегральную схему и многоядерный процессор цифровой обработки сигналов для реализации адаптивных алгоритмов выделения цели на фоне естественных и искусственных помех по совокупности амплитудных, спектральных и траекторных признаков. Кроме того, электронный блок содержит аналого-цифровой и цифроаналоговый преобразователь. 3 з.п. ф-лы, 1 ил.
1. Малогабаритная зенитная управляемая ракета, содержащая датчик крена, рулевой привод и трехспектральную многоплощадочную оптическую головку самонаведения, состоящую из оптико-электронного следящего гирокоординатора с тремя каналами спектроделения оптического излучения, при этом оптико-электронный следящий гирокоординатор содержит обмотку управления ориентацией, а также последовательно соединенные фотоприемник и импульсный усилитель с однократным дифференцированием в основном и вспомогательном каналах, фотоприемник в ультрафиолетовом канале, отличающаяся тем, что в трехспектральную многоплощадочную оптическую головку самонаведения дополнительно введен электронный блок, содержащий программируемую логическую интегральную схему и многоядерный процессор цифровой обработки сигналов, реализующие адаптивные алгоритмы выделения цели на фоне естественных и искусственных помех по совокупности амплитудных, спектральных и траекторных признаков, аналого-цифровой преобразователь, цифроаналоговый преобразователь, а в оптико-электронный следящий гирокоординатор дополнительно введен аналоговый коммутатор, в основной и вспомогательный каналы введены по два фотоприемника и импульсных усилителя с однократным дифференцированием, при этом каждый фотоприемник соединен последовательно со своим импульсным усилителем, выходы которых соединены с входами аналогового коммутатора, а в ультрафиолетовый канал дополнительно введены два фотоприемника, причем выходы трех фотоприемников ультрафиолетового канала соединены с входами аналогового коммутатора, выход которого соединен с первым входом аналого-цифрового преобразователя, при этом первый выход программируемой логической интегральной схемы соединен с входом управления аналого-цифрового преобразователя, второй выход - с входом управления аналогового коммутатора, а третий и четвертый выходы - с первым и вторым входами управления цифроаналогового преобразователя, первый выход которого соединен с входом обмотки управления ориентацией оптико-электронного следящего гирокоординатора, а второй выход - с входом рулевого привода, многоядерный процессор цифровой обработки сигналов включает блок обнаружения полезных сигналов, блок классификатора, блок запоминания и отслеживания параметров целевого сигнала, блок адаптивного селектора и блок формирования управляющих сигналов, связанные между собой внутрипроцессорными цифровыми потоками данных, при этом выход аналого-цифрового преобразователя соединен с входом многоядерного процессора цифровой обработки сигналов по параллельному каналу информационного обмена, который является входом блока обнаружения полезных сигналов, первый выход которого соединен с первым входом блока запоминания и отслеживания параметров целевого сигнала, а второй выход - с входом блока классификатора, первый выход которого соединен со вторым входом блока запоминания и отслеживания параметров целевого сигнала, а второй выход - с первым входом блока адаптивного селектора, второй вход которого соединен с выходом блока запоминания и отслеживания параметров целевого сигнала, выход блока адаптивного селектора соединен с входом блока формирования управляющих сигналов, выход которого является выходом многоядерного процессора цифровой обработки сигналов, который по параллельному каналу информационного обмена соединен со вторым входом программируемой логической интегральной схемы, первый вход которой соединен с выходом датчика крена.
2. Малогабаритная зенитная управляемая ракета по п. 1, отличающаяся тем, что выход аналого-цифрового преобразователя соединен с входом многоядерного процессора цифровой обработки сигналов по тридцатидвухразрядному параллельному каналу информационного обмена.
3. Малогабаритная зенитная управляемая ракета по п. 1, отличающаяся тем, что выход многоядерного процессора цифровой обработки сигналов соединен со вторым входом программируемой логической интегральной схемы по шестнадцатиразрядному параллельному каналу информационного обмена.
4. Малогабаритная зенитная управляемая ракета по п. 1, отличающаяся тем, что цифроаналоговый преобразователь выполнен двухканальным.
| АДАПТИВНЫЙ ЦИФРОВОЙ СПЕКТРАЛЬНЫЙ СЕЛЕКТОР ЦЕЛИ | 2015 |
|
RU2612650C2 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2527391C2 |
| ЗЕНИТНЫЙ РАКЕТНО-ПУШЕЧНЫЙ КОМПЛЕКС | 2006 |
|
RU2321818C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЫСОКОТОЧНЫМ ВООРУЖЕНИЕМ И КОМПЛЕКС ВЫСОКОТОЧНОГО ВООРУЖЕНИЯ | 2011 |
|
RU2453794C1 |
| СПОСОБ УПРАВЛЕНИЯ ЗЕНИТНОЙ УПРАВЛЯЕМОЙ РАКЕТОЙ СРЕДНЕЙ ДАЛЬНОСТИ С АКТИВНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ ПРИ НАВЕДЕНИИ НА ГРУППОВУЮ СОСРЕДОТОЧЕННУЮ ЦЕЛЬ | 2012 |
|
RU2570115C2 |
| US 7249730 B1, 31.07.2007. | |||

