Изобретение относится к области разработки систем наведения управляемых ракет и может быть использовано в комплексах ПТУР и ЗУР.
Одной из задач, решаемых при разработке систем управления, является увеличение точности наведения ракеты на цель, что, в свою очередь, связано с качеством работы привода ее рулей, т.е. с точностью отработки приводом входного сигнала.
Известен способ управления вращающейся по углу крена ракетой /Кузовков Н.Т. Системы стабилизации летательных аппаратов (баллистических и зенитных ракет). М., Высшая школа, 1976, с.237-238, рис.7.16/, включающий измерение рассогласования между ракетой и линией визирования, формирование в связанной с ракетой системе координат управляющего сигнала рулевой машинкой (РМ), усиление его и преобразование РМ в отклонение аэродинамических рулей.
Система управления, реализующая этот способ, содержит формирователи сигналов рассогласования в вертикальной и горизонтальной плоскостях, сигналы с выходов которых поступают на обмотки двух синусно-косинусных вращающихся трансформаторов (СКВТ), гироскопический датчик угла крена γ, механически связанный с роторами СКВТ, и усилитель с РМ, входы которого соединены с выходными обмотками СКВТ.
Сигнал управления V, поступающий на усилитель РМ (например, для одноканальной ракеты с одной РМ), согласно этому способу имеет вид:

где hу, hz - сигналы рассогласования в вертикальной и горизонтальной плоскостях соответственно.
Недостатком такого способа является то, что он не обеспечивает пропорциональность угла отклонения рулей управляющему сигналу вследствие влияния аэродинамической шарнирной нагрузки, действующей на рули, которая зависит от скорости ракеты и в процессе полета может изменяться не только по величине, но и по знаку.
Для повышения точности отработки приводом управляющего сигнала применяется его охват отрицательной обратной связью, в результате чего привод функционирует в автоколебательном режиме, например в известном способе /Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. - М.: Наука, 1975, с.615/. При таких способах управления отклонение руля представляет собой совокупность двух составляющих: низкочастотной, пропорциональной управляющему сигналу и высокочастотной автоколебательной составляющей, образующейся в системе замкнутого привода (амплитуда и частота автоколебательной составляющей зависит от параметров элементов системы).
Недостатком способов с автоколебательным режимом работы привода рулей является то, что в процессе полета ракеты амплитуда автоколебательной составляющей может существенно меняться и, в частности, достигать значений, близких к максимальным (положения рулей на упорах). Увеличение амплитуды автоколебаний аэродинамических рулей повышает индуктивную составляющую аэродинамического сопротивления ракеты, а при достижении упоров происходит уменьшение коэффициента передачи привода по полезной гармонике, что может приводить к недопустимому ухудшению качества процесса наведения.
Известен способ управления автоколебательной системой, включающий организацию режима вынужденных колебаний ее выходной координаты за счет формирования и введения в прямой тракт управления системы внешних высокочастотных периодических колебаний /Под редакцией Солодовникова В.В. Теория автоматического регулирования, книга 3, часть 2. - М.: Машиностроение, 1969, с 9-10, 51-52/.
В таком способе за счет внешних высокочастотных периодических колебаний происходит подавление автоколебательного режима системы и устанавливается режим вынужденных периодических колебаний с частотой внешнего воздействия. Такой режим работы получил название вибрационной линеаризации или синхронного режима.
Наиболее близким к предлагаемому способу, принятым в качестве прототипа, является способ управления летательным аппаратом (ЛА) /патент RU №2435131, МПК F42B 15/01 (2006.01)/, включающий формирование системой управления ЛА управляющего сигнала автоколебательным приводом аэродинамических рулей с вибрационной линеаризацией и соответствующее отклонение приводом аэродинамических рулей.
Система управления ЛА /патент RU №2435131, МПК F42B 15/01 (2006.01)/, реализующая данный способ, включает аппаратуру управления (АУ) ЛА, содержащую последовательно соединенные устройство измерения рассогласования (УИР) ЛА с заданной линией наведения и устройство формирования (УФ) сигналов управления, автоколебательный привод аэродинамических рулей (ПАР), содержащий последовательно соединенные суммирующий усилитель (СУ), первый вход которого подключен к выходу АУ ЛА, усилитель мощности (УМ), релейный элемент (РЭ), рулевую машинку (РМ) и датчик отклонения рулей (ДОР), выход которого соединен со вторым входом СУ, а также последовательно соединенные генератор линеаризующих колебаний (ГЛК) и блок умножения, выход которого соединен с третьим входом СУ, и устройство задания программного коэффициента изменения амплитуды линеаризующего сигнала, выход которого соединен со вторым входом блока умножения.
Известный способ управления основан на том, что введение внешних высокочастотных колебаний на вход привода приводит к нарушению условия существования автоколебаний в его контуре. При этом происходит захват внешних периодических колебаний и в системе устанавливается режим вынужденных колебаний. В результате вибрационной линеаризации угол отклонения рулей содержит наряду с составляющей, определяемой отработкой управляющего сигнала, составляющую вынужденных колебаний на частоте внешнего периодического воздействия, амплитуда которой меньше амплитуды автоколебаний.
Согласно известному способу и реализующему его устройству управляющий приводом сигнал (сигнал с выхода АУ) в случае применения во вращающейся по углу крена ракете упрощенно имеет вид согласно зависимости (1). Угол отклонения рулей δ будет иметь вид

где КП - коэффициент передачи ПАР, значение которого зависит от значений параметров РМ и аэродинамической шарнирной нагрузки /Лебедев А.А., Карабанов В.А. Динамика систем управления беспилотными летательными аппаратами. - М.: Машиностроение, 1965, с.191/;
δК - колебательная составляющая отклонений аэродинамических рулей на частоте внешнего периодического воздействия (частоте сигнала ГЛК).
Чем меньше величина этой колебательной составляющей, тем меньше индуктивная составляющая аэродинамического сопротивления ракеты от отклонения руля (соответственно, выше скорость ракеты). При δК≈0 ПАР с вибрационной линеаризацией близок к идеальному пропорциональному приводу. Применение ПАР с вибрационной линеаризацией наиболее эффективно при высоких скоростях ракеты (более 200 м/с) и больших значениях располагаемой перегрузки (>>1,0 g, где g - ускорение свободного падения). Под располагаемой перегрузкой ракеты понимается наибольшая перегрузка (ускорение) ракеты, которую она может развить при максимальном отклонении рулей /Дмитриевский А.А. Внешняя баллистика. - М.: Машиностроение, 1979, с.126/.
Недостатком способа и реализующего его устройства, представленных в прототипе, является снижение коэффициента передачи системы управления с ПАР, что нежелательно для вращающихся по углу крена ракет с низкой начальной скоростью, обладающих дефицитом располагаемой перегрузки.
Физически максимальная команда на вращающейся ракете с аэродинамическими рулями соответствует нахождению рулей на одном упоре в течение одной половины периода вращения и на другом упоре в течение другой половины периода. Для представленного в прототипе способа такая команда реализуется только при бесконечно большой величине входного сигнала.
Задачей предлагаемого изобретения является повышение точности наведения ракет с аэродинамическими рулями за счет организации рационального режима работы ПАР в процессе полета ракеты, обеспечивающего максимально возможные команды управления на участке полета с низкой скоростью с сохранением положительных свойств прототипа на участке полета с высокой скоростью.
Поставленная задача решается тем, что в способе управления ракетой, включающем формирование системой управления ракетой управляющего сигнала автоколебательным приводом аэродинамических рулей с обратной связью и вибрационной линеаризацией и соответствующее отклонение приводом аэродинамических рулей, новым является то, что до пуска ракеты задают фиксированный момент времени, от момента пуска ракеты до фиксированного момента времени сигнал управления приводом формируют в виде релейного двухпозиционного сигнала с модуляцией импульсов по ширине и при этом организуют работу привода в релейном режиме с отключением его обратной связи и вибрационной линеаризации.
В системе управления ракетой, реализующей этот способ, включающей аппаратуру управления ракетой, содержащую последовательно соединенные устройство измерения рассогласования ракеты с заданной линией наведения и устройство формирования сигналов управления, привод аэродинамических рулей, содержащий последовательно соединенные суммирующий усилитель, первый вход которого подключен к выходу аппаратуры управления ракетой, усилитель мощности, релейный элемент, рулевую машинку и датчик отклонения рулей, а также генератор линеаризующих колебаний, новым является то, что в нее введены источник временного сигнала, логическое устройство, вход которого соединен с выходом источника временного сигнала, а выход соединен со вторым входом устройства формирования сигналов управления и первыми входами первого и второго ключа, причем второй вход первого ключа соединен с выходом датчика отклонения рулей, второй вход второго ключа соединен с выходом генератора линеаризующих колебаний, а выходы первого и второго ключа соединены соответственно со вторым и третьим входами суммирующего усилителя.
Сущность предлагаемой совокупности технических решений заключается в том, что от момента пуска ракеты до фиксированного момента времени, введенного в АУ, ПАР работает в релейном режиме и, соответственно, сигнал управления, поступающий на него, также релейный, а после фиксированного момента времени ПАР работает в режиме вибрационной линеаризации. При работе ПАР в релейном режиме формируемый релейный сигнал управления модулирован по ширине импульсов (широтно-импульсная модуляция), т.е. ширина импульсов определяется величиной команды управления.
Фиксированный момент времени определяется априорно (до пуска) на основе анализа аэробаллистических характеристик ракеты: ее скорости и располагаемой перегрузки.
Предлагаемое изобретение поясняется графическим материалом.
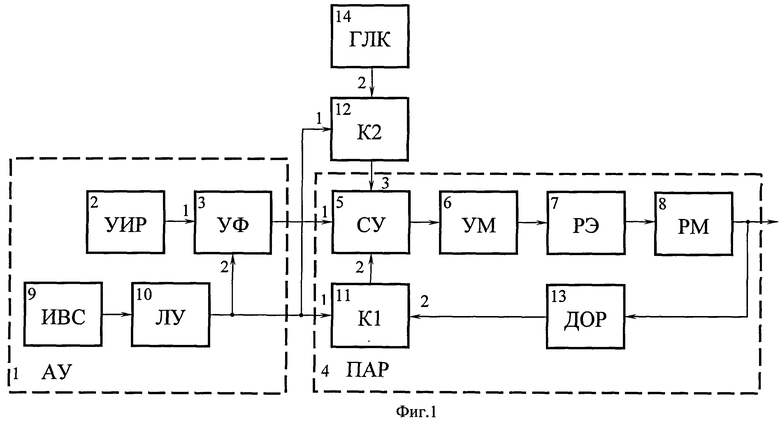
Структура предлагаемой системы управления приведена на фиг.1, где 1 - аппаратура управления (АУ), 2 - устройство измерения рассогласования (УИР), 3 - устройство формирования (УФ) сигналов управления, 4 - привод аэродинамических рулей (ПАР), 5 - суммирующий усилитель (СУ), 6 - усилитель мощности (УМ), 7 - релейный элемент (РЭ), 8 - рулевая машинка (РМ), 9 - источник временного сигнала (ИВС), 10 - логическое устройство (ЛУ), 11 - первый ключ (К1), 12 - второй ключ (К2), 13 - датчик отклонения рулей (ДОР), 14 - генератор линеаризующих колебаний (ГЛК).
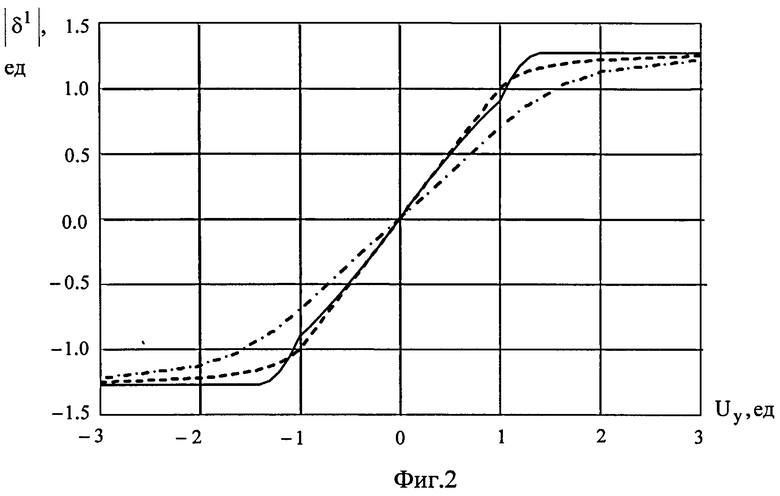
На фиг.2 представлены характеристики системы управления при работе ПАР в релейном режиме и режиме вибрационной линеаризации в виде зависимости нормированной амплитуды первой гармоники выходного сигнала (отклонения руля) |δ1| от нормированного сигнала управления в вертикальной плоскости Uу, соответствующего сигналу рассогласования hу (при нулевом сигнале управления в горизонтальной плоскости).
Сплошной линией изображена характеристика системы с релейным ПАР, причем при достаточном для отработки импульсов его быстродействии эта характеристика практически не зависит от знака и величины шарнирной нагрузки. Штриховой линией изображена характеристика с идеальным вибрационно-линеаризованным ПАР (с нулевой колебательной составляющей δК) при нулевой шарнирной нагрузке. Штрихпунктирной линией изображена характеристика системы с реальным вибрационно-линеаризованным ПАР при пружинной шарнирной нагрузке.
Предлагаемая система управления (фиг.1) работает следующим образом.
В АУ 1 УИР 2 определяет сигналы линейных рассогласований hу, hz относительно заданной линии наведения. УФ сигналов управления 3 вырабатывает команды управления. До фиксированного момента времени сигналы формируются релейными, например, согласно патенту RU №2326323 F41G 7/00 (2006.01). ЛУ 10 обеспечивает размыкание первого ключа К1 11 и второго ключа К2 12. Сигнал управления с УФ 3 проходит последовательную разомкнутую цепь «СУ 5 - УМ 6 - РЭ 7 - РМ 8», в результате чего ПАР 4 функционирует в релейном режиме.
При наступлении фиксированного момента времени, задаваемого в ИВС 9, ЛУ 10 формирует сигнал на замыкание первого ключа К1 11 и второго ключа К2 12, а также на переключение типа сигнала управления в УФ 3. Сигнал управления после переключения будет иметь вид (1). ПАР 4 с помощью ДОР 13 охватывается обратной связью, а ГЛК 14 обеспечивает режим вибрационной линеаризации. Эти сигналы подключаются на СУ 5 через его второй и третий входы соответственно.
Таким образом, на начальном участке полета при низкой начальной скорости ракеты и дефиците ее располагаемой перегрузки ПАР работает в релейном режиме, обеспечивая возможность создавать максимальные команды управления. После фиксированного момента времени ПАР работает в режиме вибрационной линеаризации, сохраняя положительные свойства прототипа. При низкой скорости ракеты на конечном участке полета (в случае, когда время работы реактивного двигателя меньше, чем максимальное полетное время, и участок излета достаточно длительный) возможен обратный переход на релейный режим работы ПАР.
Как показано на фиг.2, в релейном режиме при формировании сигнала управления согласно патенту RU №2326323 F41G 7/00 (2006.01) при |Uу|>1,1 результирующая команда больше, чем в режиме вибрационной линеаризации, даже по сравнению с идеализированным ПАР.
Для релейного режима максимальное значение первой гармоники отклонения руля 

Для системы с реальным вибрационно-линеаризованным ПАР значения выходных команд уменьшаются вследствие наличия колебательной составляющей δK (которая фактически является методической помехой) и уменьшения коэффициента передачи ПАР КП в зависимости (2).
Коэффициент передачи ПАР КП зависит от величины и знака аэродинамической шарнирной нагрузки. Так, отрицательная шарнирная нагрузка, называемая пружинной, с одной стороны, стабилизирует характеристики ПАР, улучшая качество отработки входного сигнала (при проектировании ракет, как правило, обеспечивают отрицательную шарнирную нагрузку на протяжении всего полета). С другой стороны, при этом уменьшается коэффициент передачи ПАР по сравнению с нулевой нагрузкой /Лебедев А.А., Карабанов В.А. Динамика систем управления беспилотными летательными аппаратами. - М.: Машиностроение, 1965, с.179-192/, что и отражено на фиг.2.
Следует отметить, что использование релейного режима при малой располагаемой перегрузке (немногим более 1,0 g) практически не меняет индуктивную составляющую аэродинамического сопротивления ракеты от отклонения руля, поскольку для парирования кинематического ускорения от действия силы тяжести при любом режиме работы ПАР необходимы большие команды управления и, соответственно, большие отклонения рулей (они будут занимать положение, близкое к упору). По мере увеличения скорости и располагаемой перегрузки (например, 2,0-3,0 g) использование релейного режима приводит к нежелательному увеличению индуктивной составляющей аэродинамического сопротивления, поэтому более эффективным становится режим вибрационной линеаризации.
В качестве ИВС, ЛУ, K1, K2 может быть использована схема, представленная в книге Тетельбаум И.М., Шнейдер Ю.Р. 400 схем для АВМ. - М.: Энергия, 1978, с.123.
В качестве остальных элементов системы могут быть использованы устройства, представленные в прототипе.
УФ сигналов управления в релейном режиме может быть реализован согласно патенту RU №2326323 F41G 7/00 (2006.01).
Применение предлагаемой совокупности технических решений позволяет повысить точность наведения вращающихся по углу крена ракет.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2536838C2 |
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ С АВТОКОЛЕБАТЕЛЬНЫМ ПРИВОДОМ АЭРОДИНАМИЧЕСКИХ РУЛЕЙ | 2010 |
|
RU2435131C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ РЕЛЕЙНЫХ СИГНАЛОВ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА РАКЕТОЙ | 2000 |
|
RU2184921C2 |
| РЕЛЕЙНЫЙ ПНЕВМО-ГИДРОПРИВОД С ВИБРАЦИОННОЙ ЛИНЕАРИЗАЦИЕЙ СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2003 |
|
RU2243491C1 |
| Способ управления рулевым приводом управляемой ракеты | 2023 |
|
RU2823085C1 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2310151C2 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2375667C1 |
| ВРАЩАЮЩАЯСЯ САМОНАВОДЯЩАЯСЯ РАКЕТА | 2002 |
|
RU2216707C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ РУЛЕВЫМ ПРИВОДОМ УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2206861C2 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2005 |
|
RU2288441C1 |
Изобретение относится к области разработки систем наведения ракет и может быть использовано в комплексах ПТУР и ЗУР. В способе управления ракетой формируют управляющий сигнал автоколебательным приводом аэродинамических рулей с обратной связью и вибрационной линеаризацией и соответствующее отклонение приводом аэродинамических рулей. При этом до пуска ракеты задают фиксированный момент времени, от момента пуска ракеты до фиксированного момента времени сигнал управления приводом формируют в виде релейного двухпозиционного сигнала с модуляцией импульсов по ширине и при этом организуют работу привода в релейном режиме с отключением его обратной связи и вибрационной линеаризации. Система управления ракетой содержит аппаратуру управления ракетой (1), содержащую последовательно соединенные устройство измерения рассогласования ракеты (2) с заданной линией наведения и устройство формирования сигналов управления (3), привод аэродинамических рулей (4), содержащий суммирующий усилитель (5), усилитель мощности (6), релейный элемент (7), рулевую машинку (8) и датчик отклонения рулей (13), а также генератор линеаризующих колебаний (14). В систему управления дополнительно введены первый и второй ключ (11, 12), источник временного сигнала (9) и логическое устройство (10). Достигается повышение точности наведения ракет с аэродинамическими рулями. 2 н.п. ф-лы, 2 ил.
1. Способ управления ракетой, включающий формирование системой управления ракетой управляющего сигнала автоколебательным приводом аэродинамических рулей с обратной связью и вибрационной линеаризацией и соответствующее отклонение приводом аэродинамических рулей, отличающийся тем, что до пуска ракеты задают фиксированный момент времени, от момента пуска ракеты до фиксированного момента времени сигнал управления приводом формируют в виде релейного двухпозиционного сигнала с модуляцией импульсов по ширине и при этом организуют работу привода в релейном режиме с отключением его обратной связи и вибрационной линеаризации.
2. Система управления ракетой, включающая аппаратуру управления ракетой, содержащую последовательно соединенные устройство измерения рассогласования ракеты с заданной линией наведения и устройство формирования сигналов управления, привод аэродинамических рулей, содержащий последовательно соединенные суммирующий усилитель, первый вход которого подключен к выходу аппаратуры управления ракетой, усилитель мощности, релейный элемент, рулевую машинку и датчик отклонения рулей, а также генератор линеаризующих колебаний, отличающаяся тем, что в нее введены источник временного сигнала, логическое устройство, вход которого соединен с выходом источника временного сигнала, а выход соединен со вторым входом устройства формирования сигналов управления и первыми входами первого и второго ключа, причем второй вход первого ключа соединен с выходом датчика отклонения рулей, второй вход второго ключа соединен с выходом генератора линеаризующих колебаний, а выходы первого и второго ключа соединены соответственно со вторым и третьим входами суммирующего усилителя.
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ С АВТОКОЛЕБАТЕЛЬНЫМ ПРИВОДОМ АЭРОДИНАМИЧЕСКИХ РУЛЕЙ | 2010 |
|
RU2435131C1 |

