Предлагаемое устройство управления захватом цели и пуском ракеты относится к оборонной технике и может быть использовано для автоматизированного запуска ракеты с оптической головкой самонаведения (ОГС) переносного зенитного ракетного комплекса как при применении его в пехотном варианте, так и в варианте размещения на подвижных носителях (боевых машинах, вертолете).
Известно устройство для обработки сигналов с оптической головки самонаведения и управления запуском зенитной ракеты «Игла», подключенное к двухсторонней аналоговой линии связи с ракетой и имеющее в своем составе обнаружитель цели, блок сигнала коррекции, блок логики управления устройствами сигнализации и управления ракетой в процессе ее запуска, блок реле, блок разгона и синхронизации [1], с.52, 53. Данное устройство не имеет возможности провести сравнительную оценку величины полезного сигнала и шума. Решение об обнаружении цели принимается в результате анализа ([1] стр.54) «сигнала коррекции, который характеризует угловую скорость линии визирования ракета-цель» и величины угла между оптической осью гироскопа и осью прицела (определяется по сигналу пеленга с ракеты при точном совмещении оси прицела с линией визирования ракета-цель) после перевода ОГС в режим слежения. Процесс захвата цели идет циклами. ОГС принудительно переводят в режим слежения и анализируют сигналы коррекции и пеленга. Такое устройство обладает пониженным быстродействием из-за цикличности его работы. Этот блок управления захватом цели и пуском ракеты использован в [2, блок 34].
Наиболее близким по технической сущности является автомат захвата и пуска (АЗП) переносного зенитного комплекса «Стрела-2М», позволяющий производить автоматизированный пуск ракеты в ручном и в автоматическом режимах ([3], стр.105 рис.6.15, стр.114 рис.6.18). Ракета переносного зенитного комплекса «Стрела-2М» имеет ОГС, содержащую следящий координатор цели с однороторным гироприводом, с внутренним кардановым подвесом и наружным статором (далее гирокоординатор). АЗП имеет входы, подключенные через линию связи с ракетой к выходу предусилителя фотоприемника, к выходу генератора опорного напряжения (ГОН), к выходу датчика положения оси гирокоординатора, к выходу измерителя угловой скорости линии визирования гирокоординатора, а также выходы, соединенные через линию связи с ракетой с входом сумматора гирокоординатора усилителя коррекции гирокоординатора, с входом блока пусковых цепей ракеты. АЗП содержит также программное устройство запуска ракеты, блок сигнализации оператору, реле времени анализа, схемы «И», схемы «ИЛИ», обнаружитель сигнала, ключ перевода ОГС ракеты в режим слежения, блок разгона, устройство приема команд управления от оператора с выходами: разрешение разарретирования оператором (РРО), разрешение пуска оператором (РПО), режим запуска ракеты «РУЧНОЙ», режим запуска ракеты «ВДОГОН». Режим запуска «РУЧНОЙ» применен для работы по малоскоростным целям. Вход обнаружителя сигнала соединен с входом, связанным через линию связи с выходом предусилителя фотоприемника, а выход соединен с входом блока сигнализации оператору и первым входом первой схемы «И». Вторым входом первая схема «И» соединена с выходом РРО устройства приема команд управления от оператора, третьим входом - с выходом блока разгона. Выход первой схемы «И» соединен с первым входом первой схемы «ИЛИ», ее второй вход соединен с выходом второй схемы «И», выход первой схемы «ИЛИ» подключен к ключу перевода ОГС ракеты в режим слежения и связан с реле времени анализа, выход реле времени анализа подсоединен к первому входу второй схемы «ИЛИ», второй вход второй схемы «ИЛИ» подключен к выходу второй схемы «И», выход второй схемы «И» также соединен с входом программного устройства запуска ракеты, второй вход второй схемы «И» соединен с выходом РПО устройства приема команд управления от оператора. Ключ перевода ОГС ракеты в режим слежения подключен к входу, связанному через линию связи с выходом датчика положения оси гирокоординатора. Блок разгона подключен к входу, связанному через линию связи, с выходом генератора опорного напряжения. Обнаружитель сигнала в прототипе (рис.6.15. [3]) выполнен в виде последовательно соединенных резонансного усилителя, амплитудного селектора, измерителя дисперсии сигнала и оценивает отношение сигнал/шум (см. а.с. СССР №322779).
Недостатком прототипа является то, что при пуске ракеты по неподвижной цели или при угловой скорости линии визирования менее 1,5 град/сек, изображение цели может попасть в «мертвую» зону растра ОГС. В этом случае оператору необходимо вновь выдать команду на совмещение оптической оси координатора ОГС с линией прицеливания и вновь произвести прицеливание и выдать разрешение на захват цели и пуск ракеты, так как при нахождении изображения цели в «мертвой» зоне растра отсутствует полезный сигнал на входе обнаружителя сигнала ([3] стр.142, 143).
Оценка сигнала от источника в прототипе (стр.142) происходит следующим образом. «При пусках по цели с угловой скоростью менее 1,5 град/сек и по неподвижной цели при нажатии спускового крючка (команда разрешение разарретирования оператора (РРО) световая и звуковая информация могут исчезать, так как изображение цели на растре головки может попадать в «мертвую» зону растра. В этом случае следует вернуть спусковой крючок в начальное положение и вновь произвести прицеливание. При появлении световой и звуковой информации нажать спусковой крючок и на наличие сигналов световой и звуковой информации не обращать внимание».
В данном случае сигнал обнаруживается при нахождении ОГС ракеты на арретире, когда оператор может ввести ошибку в линию прицеливания и изображение цели выйдет из «мертвой» зоны (или зоны нечувствительности), а реле световой информации блокируется при нажатии спускового крючка, если оно сработало на арретире и выдается команда РРО длительное время. Таким образом, такое решение затрудняет работу оператора и увеличивает время на запуск ракеты.
Другой недостаток прототипа, это отсутствие средств, позволяющих получить запас по отслеживаемой скорости ОГС перед пуском ракеты для повышения надежности при последующих механических воздействиях на ракету в процессе ее запуска.
Основной задачей, на решение которой направлено данное техническое решение, является повышение надежности запуска ракеты путем преднамеренного уменьшения способности ракеты отслеживать цель, пока ракета находится на пусковой установке, а также упрощение работы оператора за счет обеспечения обнаружения сигнала от цели, несмотря на наличие зоны нечувствительности у ОГС ракеты.
Для выполнения поставленных задач предлагается устройство управления захватом цели и пуском ракеты, которое дополнительно содержит генератор сканирования, генератор сигнала направленного увода, систему синхронизации, перестраиваемый узкополосный измеритель вектора входного сигнала, сумматор, ключ отключения увода, при этом вход ключа отключения увода соединен с выходом сумматора, к входам сумматора подключены выходы генератора сигнала направленного увода, генератора сканирования и выход ключа перевода ОГС ракеты в режим слежения, выход ключа отключения увода подсоединен к выходу устройства управления захватом цели и пуском ракеты, при этом вход управления ключа отключения увода подключен к выходу второй схемы «И», вход системы синхронизации подсоединен к входу устройства управления захватом цели и пуском ракеты, первый выход системы синхронизации соединен с первым входом генератора сигнала направленного увода и вторым входом перестраиваемого узкополосного измерителя вектора входного сигнала, второй выход системы синхронизации подключен к первому входу генератора сканирования, первый вход перестраиваемого узкополосного измерителя вектора входного сигнала подключен к входу устройства управления захватом цели и пуском ракеты, первый выход перестраиваемого узкополосного измерителя вектора входного сигнала соединен со вторым входом генератора сигнала направленного увода, со вторым входом генератора сканирования, второй и третий выходы перестраиваемого узкополосного измерителя вектора входного сигнала подключены к третьему и четвертому входам генератора сигнала направленного увода соответственно, пятый вход генератора сигнала направленного увода подсоединен к выходу «ВДОГОН» устройства приема команд управления от оператора, шестой вход генератора сигнала направленного увода (34) подсоединен к выходу первой схемы «ИЛИ».
Сущность технического решения поясняется чертежами и осциллограммами сигналов.
На фиг.1 представлена функциональная схема предлагаемого устройства управления захватом цели и пуском ракеты, на которой, также приведены элементы и блоки ракеты, с которыми взаимодействует устройство управления захватом цели и пуском ракеты.
На фиг.2 показана функциональная схема системы синхронизации.
На фиг.3 изображена функциональная схема перестраиваемого узкополосного измерителя вектора входного сигнала, используемого при оценке величины сигнала коррекции и управления вновь введенными генераторами сигналов сканирования и направленного увода.
На фиг.4 показана функциональная схемы генератора сканирования.
На фиг.5 приведена функциональная схема генератора сигнала направленного увода.
На фиг.6 и 7 показаны осциллограммы сигналов предлагаемого устройства.
Ракета, фиг.1, имеет в составе ОГС гирокоординатор с установленным в карданном подвесе ротором-магнитом 1, который вращается с частотой Fгир. На роторе-магните 1 установлена оптическая система. В фокальной плоскости оптической системы размещается фотоприемник 2. Управление направлением оптической оси гирокоординатора осуществляется подачей токового сигнала коррекции на катушку коррекции 3, соосную с корпусом ракеты. С резистора 4, включенного последовательно с катушкой коррекции 3, по линии связи на вход 5 устройства управления захватом цели и пуском ракеты подается сигнал, пропорциональный угловой скорости перемещения оптической оси гирокоординатора с фазой, указывающей направление перемещения оптической оси гирокоординатора. Сигнал с фотоприемника 2 через предусилитель 6 и линию связи подается на вход 7 устройства управления захватом цели и пуском ракеты. Информация о положении полюсов ротора-магнита 1 поступает с генератора опорного напряжения 8 (ГОН), выполненного в виде обмотки, ось которой перпендикулярна оси ракеты, на вход 9 устройства управления захватом цели и пуском ракеты. При прицеливании ракеты оптическая ось гирокоординатора совмещается с линией прицеливания с помощью контура электрического арретира с использованием датчика 10 положения оптической оси гирокоординатора, выполненного в виде катушки пеленга, ось которой совпадает с осью ракеты. Сигнал с датчика 10 поступает по линии связи на вход 11 устройства управления захватом цели и пуском ракеты, которое может управлять по выходу 12 положением оптической оси гирокоординатора через сумматор 13 гирокоординатора и усилитель коррекции 14, нагрузкой которого является катушка коррекции 3. На другой вход сумматора 13 гирокоординатора поступает сигнал с формирователя сигнала коррекции 15 из сигнала с фотоприемника 2. Более подробно устройство гирокоординатора приведено в патенте РФ №2101742, а также в [4]. Устройство управления захватом цели и пуском ракеты для запуска ракеты выдает сигналы на блок 17 пусковых цепей ракеты с выхода 16.
Функциональная схема предлагаемого устройства управления захватом цели и пуском ракеты, представленная на фиг.1, включает следующие элементы и связи:
5 - вход сигнала коррекции с резистора 4. Величина данного сигнала пропорциональна угловой скорости перемещения оптической оси гирокоординатора, а его фаза указывает направление перемещения оптической оси гирокоординатора;
7 - вход сигнала с фотоприемника 2 после предусилителя 6 и линии связи;
9 - вход сигнала с ГОН 8 после линии связи;
11 - вход сигнала с датчика 10 положения оптической оси гирокоординатора после линии связи;
12 - выход на линию связи для подачи сигнала управления на сумматор 13 гирокоординатора;
16 - выход на линию связи для подачи сигнала на вход блока 17 в ракете;
18 - обнаружитель сигнала, соединенный с входом 7 устройства управления захватом цели и пуском ракеты;
19 - блок разгона (для начальной раскрутки ротора-магнита 1 гирокоординатора), соединенный с входом 9 устройства управления захватом цели и пуском ракеты;
20 - систему синхронизации, соединенную с входом 9 устройства управления захватом цели и пуском ракеты и имеющей выходы 21, 22;
23 - перестраиваемый узкополосный измеритель вектора входного сигнала, соединенный с входом 5 устройства управления захватом цели и пуском ракеты и выходом 21 системы синхронизации 20, имеющий выходы 24, 25, 26;
27 - ключ перевода ОГС ракеты в режим слежения, соединенный с входом 11 устройства управления захватом цели и пуском ракеты;
28 - устройство приема команд управления от оператора.
Выдаваемые команды: разрешение разарретирования оператора (РРО) выход 29, разрешение пуска оператора (РПО) выход 30, режим запуска ракеты «ВДОГОН» выход 31, если цель удаляется от оператора;
32 - ключ отключения увода, выход которого соединен с выходом 12 устройства управления захватом цели и пуском ракеты;
33 - программное устройство запуска ракеты, соединенное с выходом 16 устройства управления захватом цели и пуском ракеты;
34 - генератор сигнала направленного увода, соединенный с выходами 24, 25, 26 перестраиваемого узкополосного фильтра 23, выходом 21 системы синхронизации 20 и с выходом 31 устройства приема команд управления от оператора 28;
35 - генератор сканирования, соединенный с выходом 22 системы синхронизации 20 и выходом 24 перестраиваемого узкополосного измерителя вектора входного сигнала 23;
36 - сумматор, входы которого соединены с выходами: ключа 27 перевода ОГС ракеты в режим слежения, генератора сканирования 35, генератора сигнала направленного увода 34;
37 - первую схему «И», связанную своими входами с выходом обнаружителя сигнала 18, с выходом 29 РРО устройства приема команд управления от оператора 28 и выходом блока разгона 19;
38 - блок сигнализации оператору, соединенный с выходом обнаружителя сигнала 18;
39 - первую схему «ИЛИ»;
40 - вторую схему «ИЛИ»;
41 - реле времени анализа, соединенное по входу с выходом первой схемы «ИЛИ» 39, а выходом с входом второй схемы «ИЛИ» 40;
42 - вторую схему «И», подключенную своими входами к выходу 30 РПО устройства приема команд управления от оператора 28 и выходу второй схемы «ИЛИ» 40, а выходом - к входам первой и второй схемам «ИЛИ», входу ключа 32 отключения увода и входу программного устройства запуска ракеты 33;
На фиг.2 показано возможное выполнение системы синхронизации 20 с использованием фазовой подстройки частоты, известное, например, из [5], которая может обладать астатизмом (глава 7 в [5]). Она содержит управляемый генератор 43, двоичный счетчик 44, фазовый детектор 45, фильтр низких частот 46. Сигнал с ГОН 8 через вход 9 устройства управления захватом цели и пуска ракеты поступает на вход фазового детектора 45, другой вход фазового детектора 45 подключен к старшему разряду двоичного счетчика 44. На первом выходе 21 системы синхронизации 20 формируется сигнал о текущей фазе положения ротора-магнита 1 относительно оси катушки ГОН 8 (представлено текущим числом в двоичном счетчике 44), далее по тексту сигнал ФАЗА. На втором 22 выходе системы синхронизации 20 формируется сигнал с частотой в 2N больше частоты сигнала с ГОН 8, где N количество разрядов счетчика 44. Если N=8, то частота управляемого генератора 43 будет в 256 раз больше частоты сигнала с ГОН и период сигнала с ГОН будет разделен на 256 состояний.
На фиг.3 показана функциональная схема перестраиваемого узкополосного измерителя вектора входного сигнала 23. Его элементы известны, например, из [6] стр.85 и стр.111. Схема используется для оптимального обнаружения сигнала с неизвестной начальной фазой. Перестраиваемый узкополосный измеритель 23 вектора входного сигнала содержит первый умножитель 47 и второй умножитель 48, два фильтра низких частот 49, 50. Блоки нелинейности 51, 52 формируют квадратурные опорные сигналы из сигнала ФАЗА с первого 21 выхода системы синхронизации 20. Сигнал на входы блоков нелинейности 51, 52 поступает с выхода сумматора 53, с помощью которого в сигнал ФАЗА добавляется постоянное число с блока 54, с помощью которого учитывается положение ГОН 8 и возможные запаздывания сигнала, чтобы обеспечить необходимую фазу сигнала генератора сигнала направленного увода 34. Выходы фильтров 49, 50 являются выходами 25 и 26 блока 23, на которых выдаются составляющие вектора сигнала коррекции X и Y. По этим составляющим модуль вектора сигнала коррекции вычисляется с использованием вычисления модуля сигналов X и Y в блоках 55, 56. Далее, с помощью сравнивающего устройства 57 и коммутатора 58, большее значение подается на первый вход сумматора 59, а меньшее значение через коммутатор 60 подается на второй вход сумматора 59 через умножитель 61 на постоянный коэффициент K=0.414. На выходе сумматора 59 получают значение модуля сигнала коррекции, мало зависящее от фазы вектора сигнала коррекции. Сигнал с выхода сумматора 59 подается через первый выход 24 блока 23 на другие блоки устройства управления захватом цели и пуском ракеты.
Функциональная схема генератора сканирования 35, формирующего сигнал сканирования, приведена на фиг.4. Он содержит делитель частоты 62, полосовой фильтр 63 с центральной частотой (Fгир+(10…20)) Гц, где (10…20) Гц выбранная частота сканирования оптической оси гирокоординатора, умножитель 64 и блок нелинейности 65. Для создания сигнала сканирования, который обеспечивает сканирование по окружности оптической оси гирокоординатора, необходимо подать на вход сумматора 13 гирокоординатора сигнал с частотой, отличающейся от частоты Fгир на выбранную частоту сканирования оптической оси. Например, для того чтобы иметь частоту сканирования 10 Гц при частоте вращения ротора-магнита 100 Гц, необходимо подать на сумматор 13 гирокоординатора сигнал с частотой 110 Гц (или 90 Гц). Делитель частоты 62 подключен к второму выходу 22 системы синхронизации 20 (к выходу управляемого генератора 43), и имеет меньший коэффициент деления, чем двоичный счетчик 44. Например, если Fгир=100 Гц и количество разрядов двоичного счетчика 44 N=8, то при коэффициенте деления делителя 62 частоты, равном 232, получим частоту на выходе делителя 62, равную 110,34 Гц. При этом частота сигнала сканирования будет равна 10,34 Гц, и оптическая ось гирокоординатора будет сканировать с этой частотой. Фильтр 63 выделяет сигнал с частотой в 110,34 Гц, близкий к синусоиде. Блок нелинейности 65 в зависимости от величины сигнала коррекции изменяет величину сигнала сканирования. При малой величине сигнала с первого 24 выхода блока 23\, величина сигнала сканирования, с помощью блока нелинейности 65, выбрана максимальной и уменьшается при увеличении сигнала коррекции.
Функциональная схема генератора сигнала направленного увода 34, предназначенного для задания направленного увода оптической оси гирокоординатора ракеты, приведена на фиг.5. Вектор сигнала генератора направленного увода 34 формируется с использованием суммы двух векторов. Первый вектор образован составляющими вектора сигнала коррекции X, Y со второго 25 и третьего 26 выходов блока 23, которые поступают на первые входы сумматоров 66, 67. Составляющие второго вектора поступают на вторые входы сумматоров 66, 67. Фаза этого вектора вычисляется блоком 68 с использованием составляющих вектора сигнала коррекции X, Y с добавлением в составляющую Y постоянной составляющей. В сигналах X, Y присутствует шумовая составляющая, вектор которой имеет случайно изменяемое значение угла фазы. Чтобы получить стабильное значение вектора направленного увода при малых значениях сигнала коррекции (малых угловых скоростях линии визирования ракета-цель), в составляющую Y и вводится постоянная составляющая, знак которой зависит от подаваемой команды режим запуска ракеты «ВДОГОН» с выхода 31 блока 28. Величина постоянной составляющей выбрана эквивалентной 0,08-0,12 величины максимальной гарантированной скорости слежения за целью, заданной для ракеты. Команда режим запуска ракеты «ВДОГОН» с выхода 31 подается на управляющий вход коммутатора 69, который через сумматор 70 добавляет постоянную составляющую с блоков 71, 72 в сигнал Y (составляющая по вертикали) перед подачей на второй вход вычислителя угла блока 68. Его первый вход подключен к выходу 25 блока 23 (составляющая X сигнала коррекции). Функция atan2(x,y) блока 68 имеет однозначное значение в диапазоне выходных углов -π+π (примеры программ см. http://www.netlib.org.). Команда режим запуска ракеты «ВДОГОН» с выхода 31 подается с устройства 28 приема команд управления от оператора, если цель удаляется от оператора.
Значения угла фазы с блока 68 поступают на блоки нелинейности синуса 73 и косинуса 74 и с их выходов на первые входы умножителей 75, 76. Выходы умножителей 75, 76 соединены со вторыми входами сумматоров 66, 67 соответственно. Величина составляющих второго вектора задается сигналом, поступающим на вторые входы умножителей 75, 76 с выхода коммутатора 79, и определяется с помощью блоков 80, 81 нелинейностей по величине сигнала «Модуль» с выхода 24 перестраиваемого узкополосного измерителя 23 вектора входного сигнала. Управляющий вход коммутатора 79 через вход 83 блока 34 соединен с выходом первой схемы «ИЛИ» 39. С помощью коммутатора 79 изменяется сигнал направленного увода в зависимости от того, находится ли ОГС ракеты в режиме слежения, ключ 27 перевода ОГС ракеты в режиме слежения разомкнут, а в режиме «арретирования» ключ 27 замкнут. Зависимость величины составляющих второго, вектора от сигнала «Модуль» с первого выхода блока 23 в режиме «арретирования» определяется блоком 80 нелинейности, а в режиме слежения блоком 81 нелинейности. Входы блоков нелинейности 80, 81 соединены с выходом 24 блока 23. При малой величине сигнала с выхода 24 блока 23, сигнал с выхода блока нелинейности 80 имеет малую положительную величину и возрастает при увеличении величины сигнала с выхода 24 блока 23. При малой величине сигнала с выхода 24 блока 23 сигнал с выхода блока нелинейности 81 имеет отрицательное значение и становится положительным при увеличении величины сигнала. В режиме слежения величина сигнала направленного увода плавно уменьшается из-за сигналов X, Y, подаваемых на первые входы сумматоров 66, 67. Возможный вид нелинейностей, используемых в устройстве, показан в графике этих блоков.
Для преобразования составляющих вектора с выходов сумматоров 66, 67 в сигнал синусоидальной формы, выходы указанных сумматоров подключены к входам умножителей 84, 85. Другие входы этих умножителей через блоки нелинейности 86 (синуса) и 87 (косинуса) и сумматор 88 связаны с выходом 21 «ФАЗА» системы синхронизации 20. С помощью сумматора 88 и постоянного числа с блока 89 устанавливается фаза сигнала генератора направленного увода 34. Суммирование производится по модулю двоичного счетчика 44 блока 20. Выходы умножителей 84, 85 подключены к входам сумматора 90, выход которого образует выход генератора 34 направленного увода, в котором формируется сигнал направленного увода синусоидальной формы с частотой Fгир.
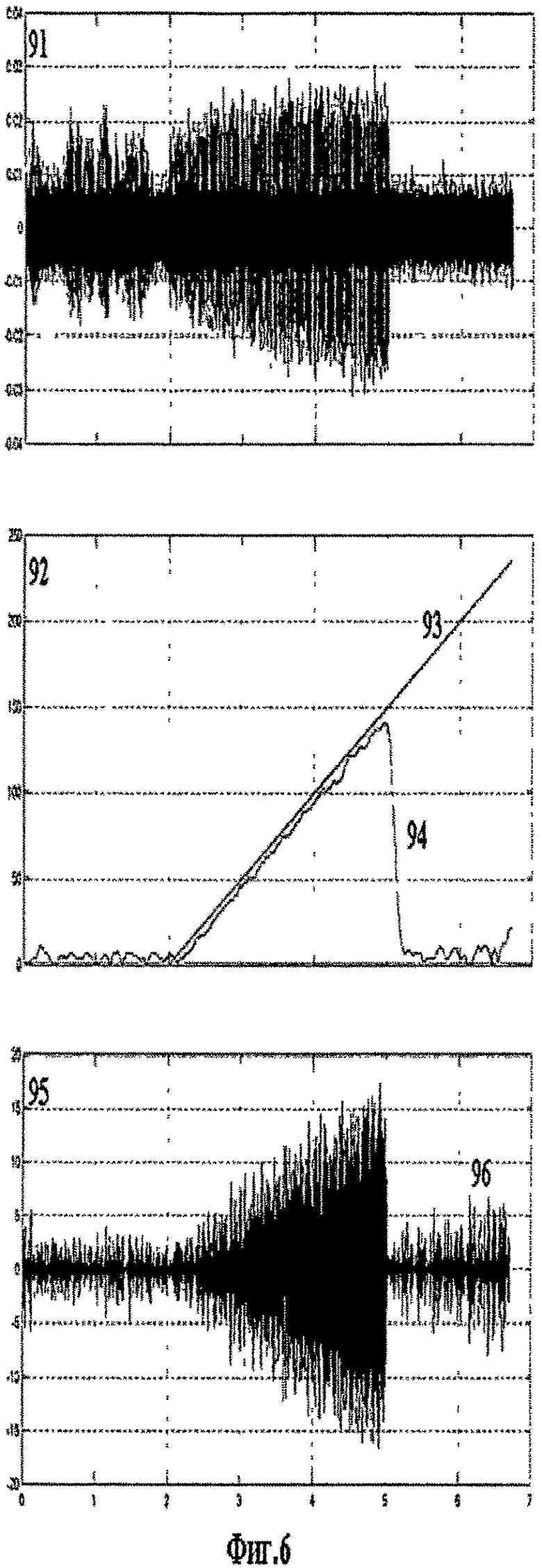
На фиг.6 и 7 приведены осциллограммы сигналов, полученные при моделировании, иллюстрирующие работу устройства и показывающие результат при введении генератора сканирования 35 и генератора сигнала направленного увода 34.
На фиг.6 приведены осциллограммы сигналов в режиме слежения при разомкнутом ключе 32, поэтому генераторы 34 и 35 отключены, а на фиг.7 при замкнутом ключе 32. При этом величина излучения цели установлена такой, что ОГС ракеты при данном уровне шума может отслеживать только цель с угловой скоростью линии визирования ракета-цель ниже, чем предельно допустимая при пуске. Величина шума зависит от внешних условий, например, ночью уровень шума меньше, чем днем. На осциллограмме 91 показан сигнал на входе обнаружителя сигнала 18. На осциллограмме 92 показано изменение скорости линии визирования ракета-цель от времени 93 и изменение сигнала 94 на первом 24 выходе блока 23. На осциллограмме 95 приведен сигнал на первом 5 входе блока 23, сигнал коррекции. На пятой секунде ОГС ракеты не смогла отследить возрастающую угловую скорость линии визирования ракета-цель. Произошел срыв слежения. После сброса режима слежения наблюдается возрастание шума в сигнале коррекции 96 из-за возрастания усиления в формирователе сигнала коррекции 15 благодаря автоматической регулировки усиления сигнала (АРУ). По шкале осциллограммы 92 срыв слежения произошел при 150 единицах.
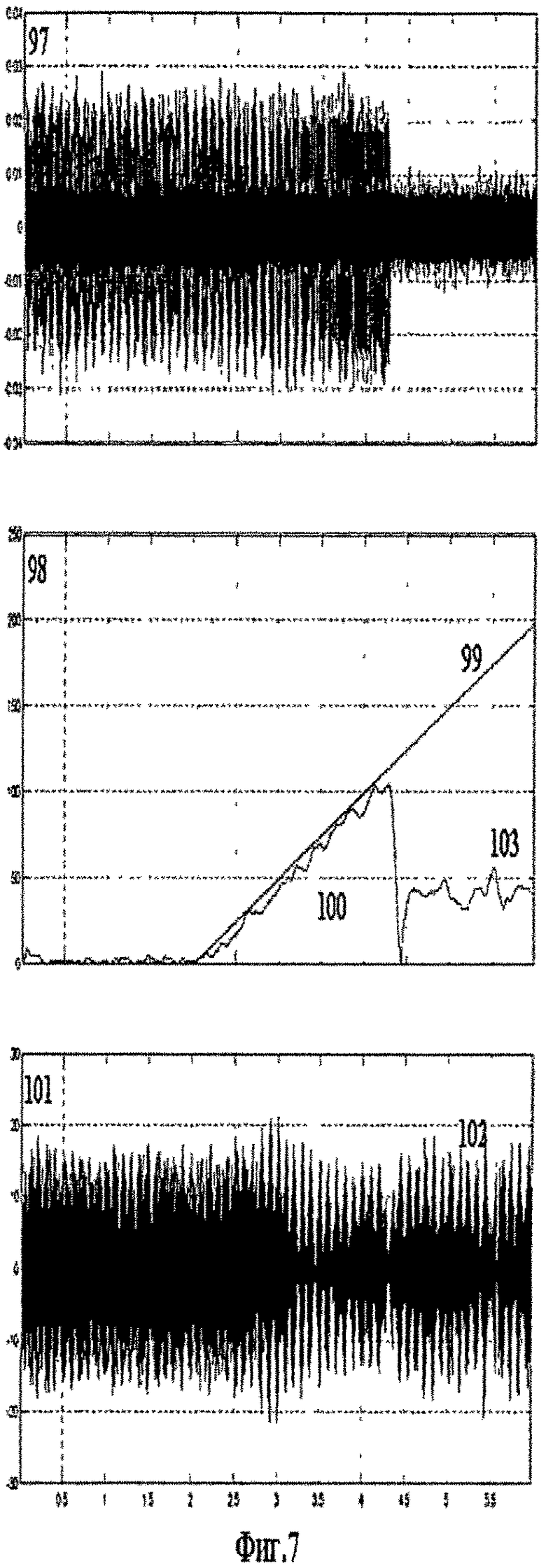
На фиг.7 при тех же внешних условиях, как и для фиг.6, показаны осциллограммы при включенном ключе 32, когда на ракету подаются сигналы с генераторов 34, 35. На осциллограмме 97 показан сигнал на входе обнаружителя сигнала 18. На осциллограмме 98 показано изменение во времени угловой скорости линии визирования ракета-цель 99 и показан сигнал 100 на первом 24 выходе блока 23. На осциллограмме 101 приведен сигнал на первом 5 входе блока 23. В момент времени на 4,3 с ракета не смогла отследить возрастающую угловую скорость линии визирования ракета-цель. Произошел срыв слежения. После сброса слежения на осциллограмме 101 в сигнале 102 наблюдается сигнал от генераторов 34, 35. На осциллограмме 98, после срыва слежения, можно видеть сигнал 103, вызванный генератором 34 направленного увода. По шкале осциллограммы 98 срыв слежения произошел при 120 единицах угловой скорости линии визирования ракета-цель, т.е при меньшей величине, чем без генераторов 34, 35.
Сравнение осциллограмм 91 и 97 между собой показывает, что амплитуда сигнала на входе обнаружителя сигнала 18, при подключенных генераторах 34, 35 практически не зависит от величины угловой скорости, в то время как амплитуда сигнала на осциллограмме 91 уменьшается до уровня шума при малой величине угловой скорости. По осциллограмме 97 амплитуда сигнала плюс шум на входе обнаружителя сигнала 18 составляет около 0,022 единицы, а амплитуда шума около 0, 008.
Из сравнения осциллограмм 92 и 98 следует, что воздействие генераторов 34, 35 приводит к уменьшению отслеживаемой угловой скорости линии визирования ракета-цель. Так как при запуске программного устройства запуска ракеты 33 произойдет размыкание ключа 32 и отключение от ракеты генераторов 34, 35, то ракета перед пуском будет иметь запас по отслеживаемой угловой скорости линий визирования ракета-цель.
Таким образом, введение в устройство управления захватом цели и пуском ракеты генератора сканирования 35 и генератора сигнала направленного увода 34, которые отключаются с началом программы запуска ракеты, позволяет повысить надежность пуска ракеты путем обеспечения запаса по отслеживаемой угловой скорости линии визирования ракета-цель перед пуском ракеты.
Упрощение работы оператора достигается благодаря возможности получать постоянную информацию от блока сигнализации оператору 38 о нахождении цели в поле зрения ОГС ракеты, несмотря на наличие зоны нечувствительности, «мертвой» зоны, у ОГС ракеты, т.к. обеспечивается постоянство амплитуды сигнала на входе обнаружителя сигнала 18, если цель находится в поле зрения оптической системы координатора ракеты. Сигналы генераторов 34, 35 уменьшают текущую величину отслеживаемой угловой скорости ОГС ракеты за линией визирования ракета-цель, поэтому, если ракета в данных условиях не имеет запаса по отслеживаемой скорости, произойдет срыв слежения за целью при нахождении ракеты еще на пусковой и ракета не будет потеряна. При малой угловой скорости визирования ракета-цель запас обеспечивает генератор сигнала направленного увода 34, а при большой угловой скорости - генератор сканирования 35.
Работа устройства управления захватом цели и пуском ракеты при запуске ракеты происходит в следующей последовательности:
- блок разгона 19 приводит во вращение ротор-магнит 1 и отключается, при этом блок разгона 19 выдает разрешение на вход первой схемы «И» 37. Поддержание оборотов ротора-магнита 1 осуществляется собственными средствами ракеты.
Система синхронизации 20 синхронизируется по сигналу со входа 9 и выдает сигналы на перестройку частоты генератора сканирования 35 и настройку перестраиваемого узкополосного измерителя вектора входного сигнала 23 на частоту Fгир;
- контур электрического арретира, по сигналу с входа 11, совмещает оптическую ось гироскопа и ось прицела через последовательно включенные замкнутый ключ 27 перевода ОГС ракеты в режим слежения, сумматор 36, ключ отключения увода 32 и выход 12 устройства управления захватом цели и пуском ракеты. Сигналы с генератора сканирования 35 и генератора сигнала направленного увода 34 суммируются в сумматоре 36 с сигналом датчика 10 положения оптической оси гирокоординатора. Усиленный сигнал поступает на катушку 3. При этом происходит сканирование оптической оси координатора по окружности с частотой около 10 Гц. Величина сигнала генератора сканирования 35 зависит от величины сигнала с первого 24 выхода блока 23. Величина и направление сигнала генератора сигнала направленного увода 34 задается сигналами с выходов 24, 25, 26 блока 23, команды с выхода 31 устройства приема команд управления от оператора 28 и сигнала с выхода 83 первой схемы «ИЛИ» 39;
- оператор производит прицеливание на цель, сопровождает ее и может выдать разрешающие команды РРО (выход 29 блока 28) и РПО (выход 30 блока 28). При наличии цели с достаточным уровнем излучения в поле зрения оптической системы гирокоординатора обнаружитель сигнала 18 даже при наличии «мертвой» зоны у ОГС будет получать сигнал с входа 7 и выдаст разрешающий сигнал на вход первой 37 схемы «И» и в блок сигнализации оператору 38.
- Когда оператор выдаст команду РРО с выхода 29 устройства 28 приема команд управления от оператора, сигнал с выхода первой схемы «И» 37, поданный на вход управления ключа 27 перевода ОГС ракеты в режим слежения, переводит ракету в режим слежения. При этом запускается реле времени анализа 41 и изменяется режим работы генератора сигнала направленного увода 34. В режиме «арретирования» направленный увод стремился смещать оптическую ось координатора по направлению угловой скорости линии визирования ракета-цель (блок нелинейности 80 выдает положительный сигнал). В режиме слежения воздействие генератора направленного увода 34 становится мешающим, если сигнал с выхода 24 блока 23 меньше заданной блоком 81 нелинейности. При большой величине сигнала с выхода 24 блока 23 сигнал на выходе блока 81 нелинейности изменит знак, станет положительным и будет помогать ракете следить за целью. То есть, в зависимости от величины сигнала «Модуль» на входе 24 генератора сигнала направленного увода 34 с выхода блока нелинейности 81 идет сигнал отрицательного знака при малой величине сигнала «Модуль» и сигнал положительного знака при большой величине сигнала «Модуль». В режиме «арретирования» сигнал с выхода коммутатора 79 всегда положителен и может менять свою величину только от сигнала «Модуль». В этом режиме генератор сигнала направленного увода 34 выдает сигнал уменьшающий (при большой величине угловой скорости линии визирования ракета-цель) угол между направлением оси прицела и оптической осью гирокоординатора;
- если мешающее воздействие генератора сканирования 35 и генератора сигнала направленного увода 34 не приводит к срыву слежения, то по окончании работы реле времени анализа 41, сигнал с его выхода через вторую схему «ИЛИ» 40 поступает на вторую схему «И» 42. При наличии разрешающего сигнала (РПО) с выхода 30 блока 28 размыкается ключ 32 отключения увода и запускается программное устройство 33 запуска ракеты.
С использованием данного технического предложения изготовлены опытные образцы устройства, которые успешно прошли испытания.
Источники информации
1. Переносный зенитный ракетный комплекс «Игла» (9К38). Техническое описание. - М.: Военное издательство. - 1987 г. (аналог).
2. Система для автоматизированного запуска с носителя ракет переносного зенитного ракетного комплекса типа «Игла», патент РФ №2206041, МПК7 F41F 3/04.
3. Переносный зенитный ракетный «Стрела-2М» (9К32М). Техническое описание. - М.: Военное издательство Министерства обороны СССР. - 1971 г. (прототип).
4. Неусыпин А.К. Гироскопические приводы. - М.: Машиностроение. - 1978 г.
5. Шахгильдян В.В., Ляховкин А.А. Системы фазовой автоподстройки частоты. - М.: Связь. - 1972 г.
6. Поиск, обнаружение и измерение сигналов в радионавигационных системах/под ред. Казаринова Ю.М. - М.: Советское радио. - 1975 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Малогабаритная зенитная управляемая ракета | 2018 |
|
RU2694932C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВОЙСКОВОГО ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА БЛИЖНЕГО ДЕЙСТВИЯ | 1985 |
|
RU2102772C1 |
| ВЕРТОЛЕТНЫЙ КОМПЛЕКС СОВРЕМЕННОГО БОРТОВОГО ВООРУЖЕНИЯ | 2019 |
|
RU2726301C1 |
| ВРАЩАЮЩАЯСЯ САМОНАВОДЯЩАЯСЯ РАКЕТА | 2002 |
|
RU2216707C1 |
| Вращающаяся самонаводящаяся ракета | 2018 |
|
RU2694934C1 |
| СПОСОБ АВТОМАТИЗАЦИИ ЦЕЛЕУКАЗАНИЯ ПРИ ПРИЦЕЛИВАНИИ НА ВЕРТОЛЕТНОМ КОМПЛЕКСЕ | 2018 |
|
RU2697939C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА КОМАНДЫ ОДНОКАНАЛЬНЫХ ВРАЩАЮЩИХСЯ РАКЕТ И СНАРЯДОВ С РЕЛЕЙНЫМ РУЛЕВЫМ ПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2574500C2 |
| СИСТЕМА ДЛЯ АВТОМАТИЗИРОВАННОГО ЗАПУСКА С НОСИТЕЛЯ РАКЕТ ПЕРЕНОСНОГО ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА ТИПА "ИГЛА" | 2001 |
|
RU2206041C1 |
| Способ вывода вращающейся по углу крена ракеты с гироскопом направления в зону захвата цели головкой самонаведения и система для его осуществления | 2017 |
|
RU2659622C1 |
| ВЕРТОЛЕТНАЯ СИСТЕМА НАВЕДЕНИЯ ОРУЖИЯ | 2003 |
|
RU2230278C1 |

Изобретение относится к оборонной технике, а именно к устройству управления захватом цели и пуском ракеты переносного зенитного комплекса с оптической головкой самонаведения (ОГС). Устройство включает в себя блок разгона ротора гирокоординатора, обнаружитель сигнала ОГС, устройство приема команд управления от оператора, блок сигнализации оператору, реле времени анализа, программное устройство запуска ракеты. Также в устройство введены перестраиваемый узкополосный измеритель вектора входного сигнала, система синхронизации, генератор сканирования, генератор сигнала направленного увода, подающих сигналы в контур слежения ОГС, когда ракета находится на пусковой установке. Производится оценка факта слежения ОГС за источником излучения и отключения этих генераторов после принятия решения на пуск ракеты. Достигается повышение надежности запуска ракеты и упрощение работы оператора. 7 ил.
Устройство управления захватом цели и пуском ракеты, имеющее входы и выходы, соединенные с ракетой через линию связи: с выходом предусилителя (вход 7), с выходом генератора опорного напряжения (вход 9), с выходом датчика положения оси гирокоординатора (вход 11), с выходом измерителя угловой скорости линии визирования гирокоординатора (вход 5), с входом сумматора усилителя коррекции гирокоординатора (выход 12), с входом блока (17) пусковых цепей ракеты (выход 16), содержащее программное устройство запуска ракеты (33), блок сигнализации (38) оператору, реле времени анализа (41), первую (37) и вторую (42) схемы «И», первую (39) и вторую (40) схемы «ИЛИ», обнаружитель сигнала (18), подключенный к входу (7), ключ (27) перевода ОГС ракеты в режим слежения, подключенный к входу (11), блок разгона (19), подключенный к входу (9), устройство (28) приема команд управления от оператора с выходами: разрешение разарретирования оператором «РРО» (выход 29), разрешение пуска оператором «РПО» (выход 30), режим запуска ракеты «ВДОГОН» (выход 31), при этом выход программного устройства (33) запуска ракеты подключен к выходу (16), выход обнаружителя сигнала (18) соединен с входом блока сигнализации оператору (38) и первым входом первой схемы «И» (37), вторым входом первая схема «И» (37) соединена с выходом «РРО» (29) устройства приема команд управления от оператора (28), третьим входом - с выходом блока разгона (19), первый вход первой схемы «ИЛИ» (39) соединен с выходом первой схемы «И» (37), ее второй вход соединен с выходом второй схемы «И» (42), выход (83) первой схемы «ИЛИ» (39) подключен к ключу (27) перевода ОГС ракеты в режим слежения и входу реле времени анализа (41), выход реле времени анализа (41) подсоединен к первому входу второй схемы «ИЛИ» (40), выход второй схемы «ИЛИ» (40) подключен к первому входу второй схемы «И» (42), выход второй схемы «И» (42) соединен со вторым входом первой схемы «ИЛИ» (39) и вторым входом второй схемы «ИЛИ» (40) и входом программного устройства запуска ракеты (33), второй вход второй схемы «И» (42) соединен с выходом «РПО» (30) устройства приема команд управления от оператора (28), отличающееся тем, что оно дополнительно содержит генератор сканирования (35), генератор сигнала направленного увода (34), систему синхронизации (20), перестраиваемый узкополосный измеритель вектора входного сигнала (23), сумматор (36), ключ (32) отключения увода, при этом вход ключа (32) отключения увода соединен с выходом сумматора (36), к входам сумматора (36) подключены выходы генератора сигнала направленного увода (34), генератора сканирования (35) и выход ключа (27) перевода ОГС ракеты в режим слежения, выход ключа (32) отключения увода подсоединен к выходу (12) устройства управления захватом цели и пуском ракеты, при этом вход управления ключа (32) отключения увода подключен к выходу второй схемы «И» (42), вход системы синхронизации (20) подсоединен к входу (9) устройства управления захватом цели и пуском ракеты, первый выход (21) системы синхронизации (20) соединен с первым входом генератора сигнала направленного увода (34) и вторым входом перестраиваемого узкополосного измерителя вектора входного сигнала (23), второй выход (22) системы синхронизации (20) подключен к первому входу генератора сканирования (35), первый вход перестраиваемого узкополосного измерителя вектора входного сигнала (23) подключен к входу (5) устройства управления захватом цели и пуском ракеты, первый выход (24) перестраиваемого узкополосного измерителя вектора входного сигнала (23) соединен со вторым входом генератора сигнала направленного увода (34), со вторым входом генератора сканирования (35), второй (25) и третий (26) выходы перестраиваемого узкополосного измерителя вектора входного сигнала (23) подключены к третьему и четвертому входам генератора сигнала направленного увода (34) соответственно, пятый вход генератора сигнала направленного увода (34) подсоединен к выходу «ВДОГОН» (31) устройства приема команд управления от оператора (28), шестой вход генератора сигнала направленного увода (34) подсоединен к выходу (83) первой схемы «ИЛИ» (39).
| СИСТЕМА ДЛЯ АВТОМАТИЗИРОВАННОГО ЗАПУСКА С НОСИТЕЛЯ РАКЕТ ПЕРЕНОСНОГО ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА ТИПА "ИГЛА" | 2001 |
|
RU2206041C1 |
| ЗЕНИТНАЯ ПУШЕЧНО-РАКЕТНАЯ БОЕВАЯ МАШИНА | 2007 |
|
RU2348001C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ РАКЕТЫ ПРИ НАВЕДЕНИИ НА ЦЕЛЬ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2311605C2 |

