Область техники
Настоящее изобретение относится к устройству и способу для управления торможением во время столкновения, которые предназначены для автоматического включения тормоза в том случае, когда транспортное средство участвует в столкновении.
Уровень техники
Многие транспортные средства, в настоящее время задействованные в коммерческой деятельности, снабжены функцией торможения для предотвращения повреждений при столкновении (именуемой далее функцией автоматического торможения), предназначенной для автоматического включения тормоза перед столкновением с объектом и после него. Традиционно целью тех типов автоматических тормозов, которые находят массовое применение, является замедление транспортного средства, как описано, например, в выложенной публикации № 2008-044520 патента Японии (см. абзац [0038] и т.д.). В последнее время в целях остановки транспортного средства число типов автоматических тормозов увеличивается.
Несмотря на то, что автоматическое торможение вносит вклад в исключение аварий, такие аварии невозможно полностью предотвратить. При столкновении транспортного средства с пешеходом необходимо, чтобы водитель своевременно обеспечил уведомление относительно аварии, а если пешеход ранен, необходимо также обеспечить помощь пешеходу. Например, в выложенной публикации № 2005-041334 патента Японии (см. абзац [0020], и т.д.) указано, что в то время, когда происходит столкновение между транспортным средством и пешеходом, устанавливается соединение связи между транспортным средством и внешней организацией (центром контроля за транспортными средствами, отделением полиции и т.п.)
Возникают случаи, в которых после дорожно-транспортного происшествия водитель может испытывать дискомфорт или беспокойство и поэтому может оказаться не в состоянии включить стояночный тормоз. В таком состоянии, если водитель осуществляет связь с внешней организацией, транспортное средство может начать двигаться во время связи, и существует вероятность того, что транспортное средство станет причастным к еще одному пострадавшему на дороге и вызовет увеличение аварии. Кроме того, существует также вероятность того, что неблагонамеренный водитель может попытаться скрыться с места аварии, не обеспечив какого-либо уведомления.
Метод в соответствии с выложенной публикацией № 2008-044520 патента Японии не относится к обеспечению уведомления после того, как произошла авария. Хотя метод в соответствии с выложенной публикацией № 2005-041334 патента Японии относится к обеспечению уведомления после того, как произошла авария, такой метод не связывает уведомление с управлением тормозами, и после столкновения управление торможением не осуществляется. Следовательно, при использовании методов в соответствии с выложенной публикацией № 2008-044520 патента Японии и выложенной публикацией № 2005-041334 патента Японии, вышеописанные проблемы увеличения аварии и скрывания водителя с места аварии не могут быть решены.
Настоящее изобретение сделано с учетом вышеуказанных проблем, и целью его является создание устройства и способа для управления торможением во время столкновения, что позволяет предотвращать увеличение аварии после дорожно-транспортного происшествия наряду с предотвращением скрывания водителя с места аварии.
Настоящее изобретение отличается устройством для управления торможением во время столкновения, предназначенным для автоматического включения тормоза до столкновения или после столкновения между транспортным средством и объектом, содержащим блок обнаружения столкновения, выполненный с возможностью обнаружения столкновения между транспортным средством и объектом, блок уведомления, выполненный с возможностью выдачи уведомления во внешнюю среду транспортного средства в том случае, если столкновение между транспортным средством и объектом обнаружено блоком обнаружения столкновения, и блок управления тормозом, выполненный с возможностью поддержания включенного состояния тормоза во время выдачи уведомления блоком уведомления.
В настоящем изобретении блок уведомления автоматически уведомляет внешнюю организацию в случае дорожно-транспортного происшествия, а блок управления тормозом поддерживает включенное состояние тормоза во время выдачи уведомления блоком уведомления. В соответствии с настоящим изобретением, возможно обеспечение уведомления во внешнюю организацию сразу же после дорожно-транспортного происшествия, а во время периода, когда осуществляется уведомление, возможно предотвращение увеличения аварии из-за перемещения транспортного средства. Кроме того, поскольку поддерживается включенное состояние тормоза, и транспортное средство неспособно перемещаться во время уведомления, скрывание неблагонамеренного водителя с места аварии может быть предотвращено.
Кроме того, в настоящем изобретении блок управления тормозом может быть выполнен с возможностью освобождения поддержания включенного состояния тормоза после завершения уведомления блоком уведомления. Если включенное состояние тормоза освобождается по завершении уведомления, как в настоящем изобретении, возможно надежное уведомление внешней организации, а также надежное предотвращение скрывания неблагонамеренного водителя с места аварии.
Кроме того, в настоящем изобретении может дополнительно предусматриваться блок распознавания объекта, выполненный с возможностью распознавания объекта, причем, блок уведомления выполнен с возможностью выдачи уведомления во внешнюю среду транспортного средства в том случае, когда объект, распознанный блоком распознавания объекта, является человеком, при этом блок управления тормозом может быть выполнен с возможностью поддержания включенного состояния тормоза в том случае, когда объект, распознанный блоком распознавания объекта, является человеком. В настоящем изобретении в том случае, когда объект, столкнувшийся с транспортным средством, является человеком, и, если поддерживается включенное состояние тормоза наряду с обеспечением уведомления во внешнюю среду транспортного средства, пострадавшему может быть своевременно оказана помощь, и так называемое преступление, виновник которого скрывается, может быть предотвращено.
Настоящее изобретение отличается способом управления торможением во время столкновения, с помощью которого тормоз автоматически включается до столкновения или после столкновения между транспортным средством и объектом, включающим в себя этап обнаружения столкновения, состоящий в обнаружении столкновения между транспортным средством и объектом, этап уведомления, состоящий в выдаче уведомления во внешнюю среду транспортного средства в том случае, если столкновение между транспортным средством и объектом обнаружено с помощью этапа обнаружения столкновения, и этап поддержания тормоза, состоящий в поддержании включенного состояния тормоза во время выдачи уведомления на этапе уведомления.
В настоящем изобретении уведомление автоматически выдается во внешнюю организацию в случае дорожно-транспортного происшествия, при этом во время выдачи уведомления поддерживается включенное состояние тормоза. В соответствии с настоящим изобретением, возможно обеспечение уведомления во внешнюю организацию сразу же после дорожно-транспортного происшествия, а во время периода, когда осуществляется уведомление, возможно предотвращение увеличения аварии из-за перемещения транспортного средства. Кроме того, поскольку поддерживается включенное состояние тормоза, и транспортное средство неспособно перемещаться во время уведомления, скрывание неблагонамеренного водителя с места аварии может быть предотвращено.
Кроме того, в настоящем изобретении может дополнительно предусматриваться этап освобождения тормоза, состоящий в освобождении поддержания включенного состояния тормоза после завершения уведомления с помощью этапа уведомления. Если включенное состояние тормоза освобождается по завершении уведомления, как в настоящем изобретении, возможно надежное уведомление внешней организации, а также надежное предотвращение скрывания неблагонамеренного водителя с места аварии.
Кроме того, в настоящем изобретении может дополнительно предусматриваться этап распознавания объекта, состоящий в распознавании объекта, причем, на этапе уведомления уведомление выдается во внешнюю среду транспортного средства в том случае, когда объект, распознанный с помощью этапа распознавания объекта, является человеком, при этом на этапе поддержания тормоза включенное состояние тормоза поддерживается в том случае, когда объект, распознанный блоком распознавания объекта, является человеком. В настоящем изобретении в том случае, когда объект, столкнувшийся с транспортным средством, является человеком, и, если поддерживается включенное состояние тормоза наряду с обеспечением уведомления во внешнюю среду транспортного средства, пострадавшему может быть своевременно оказана помощь, и так называемое преступление, виновник которого скрывается, может быть предотвращено.
В соответствии с настоящим изобретением, возможно обеспечение уведомления во внешнюю организацию сразу же после дорожно-транспортного происшествия, а во время периода, когда осуществляется уведомление, возможно предотвращение увеличения аварии из-за перемещения транспортного средства. Кроме того, поскольку поддерживается включенное состояние тормоза, и транспортное средство неспособно перемещаться во время уведомления, скрывание неблагонамеренного водителя с места аварии может быть предотвращено.
Краткое описание чертежей
Фиг. 1 представляет собой функциональную блок-диаграмму устройства для управления торможением во время столкновения в соответствии с настоящим вариантом осуществления; и
фиг. 2 представляет собой структурную схему процесса, выполняемого в настоящем варианте осуществления.
Описание вариантов осуществления
Предпочтительные варианты осуществления устройства и способа для управления торможением во время столкновения в соответствии с настоящим изобретением подробно описываются ниже со ссылкой на прилагаемые чертежи.
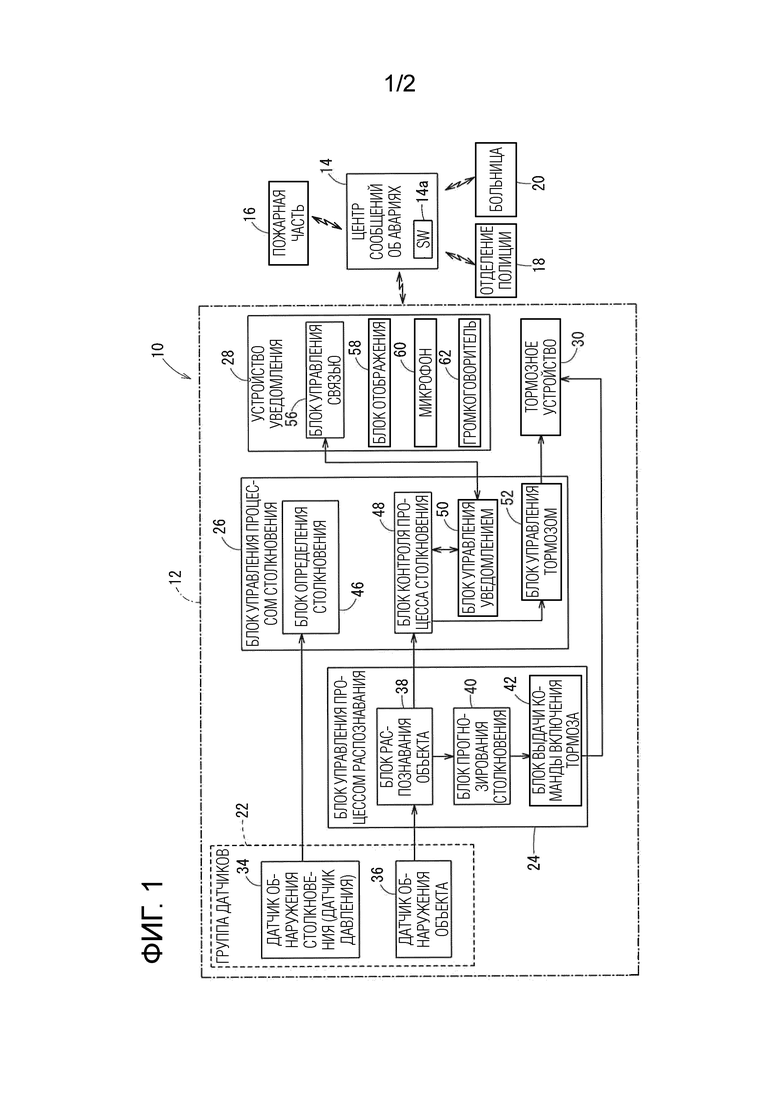
Как показано на фиг. 1, устройство 12 для управления торможением во время столкновения, которое предусматривается в транспортном средстве 10, уведомляет центр 14 сообщений об авариях, когда транспортное средство 10 сталкивается с объектом. Центр 14 сообщений об авариях соответствующим образом уведомляет другие внешние учреждения, такие как пожарная часть 16, отделение 18 полиции, больница 20 и т.п.
[Конфигурация устройства 12 для управления торможением во время столкновения]
Устройство 12 для управления торможением во время столкновения содержит группу 22 датчиков для обнаружения различной информации, блок 24 управления процессом распознавания, который осуществляет процесс распознавания объекта и процесс, происходящий в результате процесса распознавания, блок 26 управления процессом столкновения, который осуществляет различные процессы в то время, когда происходит столкновение, устройство 28 уведомления, которое выдает уведомление в центр 14 сообщений об авариях, и тормозное устройство 30, которое тормозит колеса (не показаны) транспортного средства. Датчики группы 22 датчиков и блок 24 управления процессом распознавания соединены с локальной сетью контроллеров (CAN). Датчик 34 обнаружения столкновения группы 22 датчиков и блок 26 управления процессом столкновения соединены друг с другом по выделенной линии. Блок 24 управления процессом распознавания и блок 26 управления процессом столкновения, а также блок 26 управления процессом столкновения и устройство 28 уведомления соединены с помощью FCAN.
Группа 22 датчиков содержит датчик 34 обнаружения столкновения, который обнаруживает столкновение, происходящее в транспортном средстве 10, и датчик 36 обнаружения объекта, который обнаруживает объект перед транспортным средством 10.
В качестве датчика 34 обнаружения столкновения может использоваться, например, датчик давления или датчик ускорения. Ниже описывается вариант осуществления с использованием датчика 34 давления. Датчик 34 давления расположен перед транспортным средством 10, например, в бампере и обнаруживает давление, создаваемое в бампере ввиду столкновения и т.п. В том случае, когда объект, который сталкивается с транспортным средством 10, является человеком, положение столкновения уже по сравнению со случаем, в котором объект является другим транспортным средством, и, кроме того, давление во время столкновения меньше. Следовательно, с целью надежного обнаружения столкновения с человеком предпочтительно, чтобы множество датчиков 34 давления предусматривалось во множестве положений перед транспортным средством 10.
Датчик 36 обнаружения объекта представляет собой такие устройства, как радиолокационная станция миллиметрового диапазона, микроволновая радиолокационная станция, лазерная радиолокационная станция, инфракрасный датчик, ультразвуковой датчик, монокулярная камера, стереоскопическая камера и т.п., которые активно обнаруживают объекты перед транспортным средством 10 и направляют информацию об окружающей обстановке. С целью улучшения точности обнаружения объектов и информации об окружающей обстановке предпочтительно, чтобы предусматривалось множество таких устройств.
Блок 24 управления процессом распознавания состоит из блока управления двигателем (ECU). ECU представляет собой вычислительное устройство, содержащее микрокомпьютер, и включает в себя CPU (Центральный Процессор) и в качестве памяти Постоянное Запоминающее Устройство (ROM) (включая Электрически Стираемое Программируемое Постоянное Запоминающее Устройство (EEPROM)), RAM (Оперативное Запоминающее Устройство) и т.п. Помимо этого, ECU содержит устройства ввода-вывода, такие как аналого-цифровой преобразователь, цифро-аналоговый преобразователь и т.п., и таймер, служащий в качестве блока регистрации времени, и т.д. Благодаря CPU, который считывает и исполняет программы, хранящиеся в ROM, ECU используется в качестве различных реализующих функции блоков (реализующих функции средств), например, блока управления, вычислительного блока, блока обработки и т.д. В настоящем варианте осуществления ECU, который представляет собой блок 24 управления процессом распознавания, используется в качестве блока 38 распознавания объекта, блока 40 прогноза столкновения и блока 42 выдачи команды включения тормоза. ECU может быть разделен на множество ECU или может быть объединен с ECU блока 26 управления процессом столкновения, описываемого ниже.
Блок 38 распознавания объекта выполнен с возможностью распознавания и идентификации объектов и информации об окружающей обстановке, расположенных перед транспортным средством 10, на основе информации датчика, обнаруживаемой датчиком 36 обнаружения объекта. Кроме того, блок 38 распознавания объекта выполнен с возможностью распознавания такой информации, как расстояние от транспортного средства 10 до объекта и поперечное положение объекта и т.д. Например, соответствующие элементы информации могут распознаваться на основе изображения, зарегистрированного камерой датчика 36 обнаружения объекта, либо соответствующие элементы информации могут распознаваться с помощью так называемой системы сбора, анализа, обобщения и преобразования в единый формат информации, которая предназначена для обработки информации радиолокационной станции и камеры на комплексной основе.
Блок 40 прогноза столкновения выполнен с возможностью прогноза возможности столкновения на основе расстояния от транспортного средства 10 до объекта, который распознан блоком 38 распознавания объекта, и относительной скорости между транспортным средством 10 и распознанным объектом. Блок 42 выдачи команды включения тормоза выполнен с возможностью передачи команды включения тормоза в тормозное устройство 30 в том случае, если блоком 40 прогноза столкновения спрогнозировано, что существует вероятность столкновения.
Блок 26 управления процессом столкновения состоит из ECU так же, как и блок 24 управления процессом распознавания. В настоящем варианте осуществления ECU, который представляет собой блок 26 управления процессом столкновения, используется в качестве блока 46 определения столкновения, блока 48 контроля процесса столкновения, блока 50 управления уведомлением и блока 52 управления тормозом.
Блок 46 определения столкновения выполнен с возможностью определения того, произошло ли столкновение, на основе информации о давлении, обнаруживаемой датчиком 34 давления. На основе информации от блока 38 распознавания объекта и блока 46 определения столкновения блок 48 контроля процесса столкновения контролирует состояние связи, осуществляемой между устройством 28 уведомления и центром 14 сообщений об авариях, а также состояние включения тормозного устройства 30. Блок 50 управления уведомлением выполнен с возможностью передачи команды уведомления в устройство 28 уведомления, а также приема уведомления о завершении сообщения от устройства 28 уведомления. Блок 52 управления тормозом выполнен с возможностью передачи команды поддержания тормоза и команды освобождения тормоза в тормозное устройство 30.
Устройство 28 уведомления содержит блок 56 управления связью для установления соединения связи посредством беспроводной связи (по сети мобильной связи или сети связи общего пользования) с внешней организацией, включая центр 14 сообщений об авариях, наряду с исполнением различных процессов, относящихся к соединению связи. Кроме того, устройство 28 уведомления содержит блок 58 отображения для отображения информации, относящейся к соединению связи, микрофон 60 и громкоговоритель 62. Блок 56 управления связью представляет собой компьютер и действует как различные функциональные блоки с помощью своего CPU (Центрального Процессора), исполняющего программы, хранящиеся в запоминающем блоке. Путем исполнения таких программ могут осуществляться автоматическое уведомление в центр 14 сообщений об авариях и активироваться телефонное соединение с центром 14 сообщений об авариях с помощью микрофона 60 и громкоговорителя 62. Устройство 28 уведомления выполнено, например, в виде навигационной системы транспортного средства.
Тормозное устройство 30 состоит из не показанного на чертеже тормозного привода, который приводится в действие в соответствии с командами, передаваемыми от блока 42 выдачи команды включения тормоза и блока 52 управления тормозом, и фрикционного тормоза, который переключается между включением и освобождением за счет действия тормозного привода.
Центр 14 сообщений об авариях снабжен переключателем (SW) 14a для приостановки связи, при этом с помощью оператора, управляющего SW 14a, связь приостанавливается.
[Операции устройства 12 для управления торможением во время столкновения]
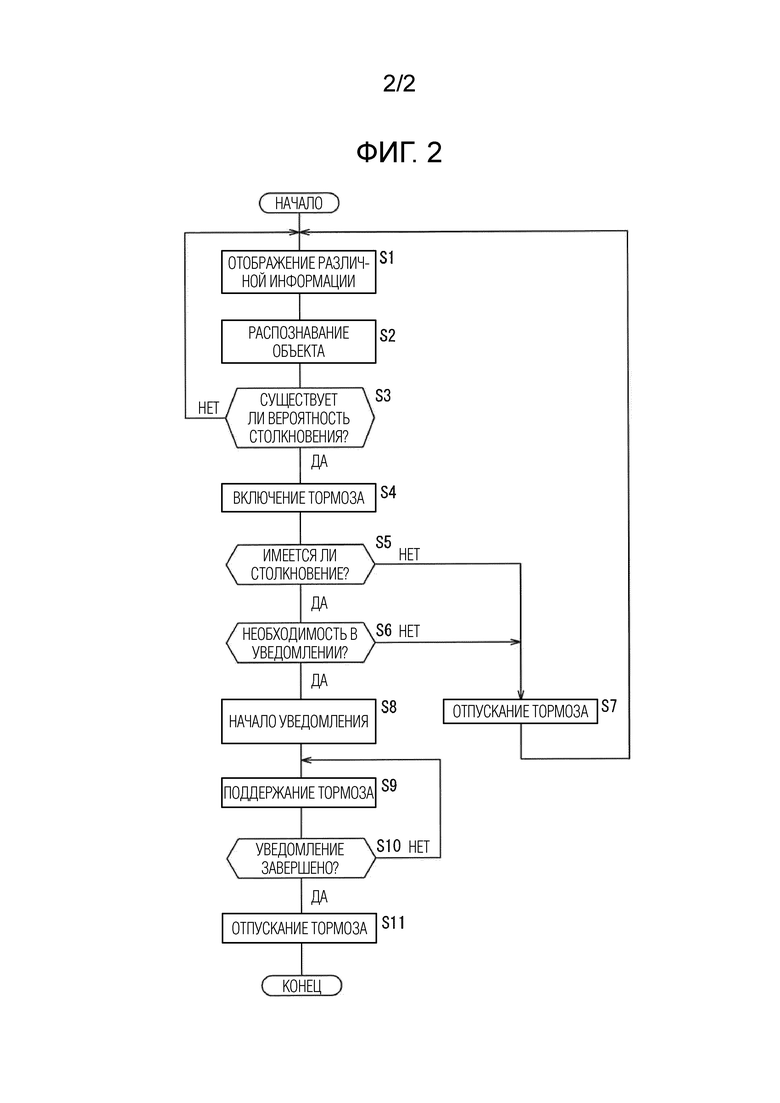
Операции устройства 12 для управления торможением во время столкновения описываются ниже с помощью структурной схемы процесса, изображенной на фиг. 2. На этапе S1 группа 22 датчиков обнаруживает различные типы информации. Обнаружение различной информации осуществляется непрерывно с заданными временными интервалами, например, в каждом из чрезвычайно коротких временных интервалов, составляющих мс (миллисекунды), во время исполнения процессов в соответствии со структурной схемой на фиг. 2.
На этапе S2 блок 38 распознавания объекта принимает информацию, обнаруживаемую датчиком 36 обнаружения объекта, и распознает объекты и информацию об окружающей обстановке перед транспортным средством 10. Кроме того, если объект распознан, блок 38 распознавания объекта идентифицирует, является ли объект человеком. Кроме того, распознаются расстояние и относительная скорость и т.д. между транспортным средством 10 и объектом.
На этапе S3 блок 40 прогнозирования столкновения прогнозирует, что существует вероятность возникновения столкновения (этап S3: ДА) в том случае, если расстояние между транспортным средством 10 и объектом, распознаваемым блоком 38 распознавания объекта, меньше заданного расстояния, а относительная скорость больше или равна заданной скорости. В этом случае процесс переходит на этап S4. С другой стороны, в том случае, если расстояние между транспортным средством 10 и объектом, распознаваемым блоком 38 распознавания объекта, больше заданного расстояния, либо относительная скорость меньше заданной скорости, блок 40 прогнозирования столкновения прогнозирует, что отсутствует вероятность возникновения столкновения (этап S3: НЕТ). В этом случае процесс возвращается на этап S1.
На этапе S4 блок 42 выдачи команды включения тормоза передает команду включения тормоза в тормозное устройство 30 таким образом, что может обеспечиваться замедление, соответствующее расстоянию и относительной скорости между транспортным средством 10 и объектом. Тормозной привод тормозного устройства 30 включается по команде включения тормоза и тем самым включает фрикционный тормоз. Кроме того, транспортное средство 10 пытается избежать столкновения с объектом.
На этапе S5 блок 46 определения столкновения принимает информацию о давлении, передаваемую от датчика 34 давления, и определяет, действительно ли столкнулись транспортное средство 10 и объект. В том случае, если транспортное средство 10 столкнулось с объектом несмотря на то, что тормозное устройство было включено, датчик 34 давления обнаруживает давление, которое больше или равно заданной величине. Если датчик 34 давления обнаружил давление, большее или равное заданной величине, блок 46 определения столкновения определяет, что произошло столкновение (этап S5: ДА). В этом случае процесс переходит на этап S6. С другой стороны, если столкновение между транспортным средством 10 и объектом предотвращено благодаря включению тормозного устройства 30, датчик 34 давления обнаруживает давление, которое меньше заданной величины. Если датчик 34 давления обнаружил давление, меньшее заданной величины, блок 46 определения столкновения определяет, что столкновение не произошло (этап S5: НЕТ). В этом случае процесс переходит на этап S7. На этапе S7 блок 52 управления тормозом передает команду освобождения тормоза в тормозное устройство 30. Затем процесс возвращается на этап S1.
На этапе S6 блок 48 контроля процесса столкновения определяет, необходимо ли уведомление в центр 14 сообщений об авариях. В данном случае необходимость в таком уведомлении определяется на основе того, является ли объект, который столкнулся с транспортным средством 10, человеком. Блок 48 контроля процесса столкновения принимает результат идентификации объекта, которая осуществлялась блоком 38 распознавания объекта, и определяет, является ли объект человеком. Если объект является человеком, то определяется, что имеется необходимость в обеспечении уведомления (этап S6: ДА). В этом случае процесс переходит на этап S8. С другой стороны, если объект не является человеком, то определяется, что уведомление не нужно (этап S6: НЕТ). В этом случае процесс переходит на этап S7. На этапе S7 блок 52 управления тормозом передает команду освобождения тормоза в тормозное устройство 30. Затем процесс возвращается на этап S1.
На этапе S8 блок 50 управления уведомлением передает команду уведомления в устройство 28 уведомления. Устройство 28 уведомления инициирует программу уведомления в соответствии с командой уведомления и устанавливает соединение связи с центром 14 сообщений об авариях. Кроме того, посредством микрофона 60 и громкоговорителя 62 устройство 28 уведомления обеспечивает проведение телефонного разговора между водителем в транспортном средстве 10 и оператором со стороны центра 14 сообщений об авариях.
На этапе S9 блок 48 контроля процесса столкновения контролирует блок 52 управления тормозом таким образом, что во время уведомления (в то время как осуществляется связь в соединенном состоянии) поддерживается включенное состояние тормозного устройства 30. В это время блок 52 управления тормозом передает команду поддержания тормоза в тормозное устройство 30. Кроме того, в том случае, если включенное состояние тормоза поддерживается до тех пор, пока тормозное устройство 30 не примет команду освобождения тормоза, блок 52 управления тормозом не обязательно должен передавать команду поддержания тормоза. В это время тормозной привод тормозного устройства 30 поддерживает включенное состояние тормоза, при этом фрикционный тормоз также поддерживается во включенном состоянии.
На этапе S10 блок 48 контроля процесса столкновения определяет, завершилось ли уведомление в центр 14 сообщений об авариях. Когда уведомление завершилось, оператор со стороны центра 14 сообщений об авариях приводит в действие SW 14a и тем самым приостанавливает связь с водителем. Когда связь приостановлена, устройство 28 уведомления передает уведомление о завершении сообщения в блок 50 управления уведомлением. Если блок 50 управления уведомлением принимает уведомление о завершении сообщения, блок 48 контроля процесса столкновения определяет, что уведомление завершено (этап S10: ДА). В этом случае процесс переходит на этап S11. С другой стороны, если блок 50 управления уведомлением не принимает уведомление о завершении сообщения, блок 48 контроля процесса столкновения определяет, что уведомление продолжает выполняться (этап S10: НЕТ). В этом случае процесс возвращается на этап S9, при этом поддерживается включенное состояние тормозного устройства 30.
На этапе S11 блок 52 управления тормозом передает команду освобождения тормоза в тормозное устройство 30. Тормозной привод тормозного устройства 30 срабатывает по команде освобождения тормоза и тем самым освобождает фрикционный тормоз.
[Сущность настоящего варианта осуществления]
Настоящий вариант осуществления относится к устройству 12 для управления торможением во время столкновения, которое предназначено для автоматического включения тормоза (тормозного устройства 30) до того, как (или после того, как) между транспортным средством 10 и объектом произойдет столкновение. Устройство 12 для управления торможением во время столкновения в соответствии с настоящим вариантом осуществления содержит блок обнаружения столкновения (датчик 34 давления, блок 46 определения давления), который обнаруживает столкновение между транспортным средством 10 и объектом, блок уведомления (блок 50 управления уведомлением, устройство 28 уведомления), который выдает уведомление во внешнюю среду (центр 14 сообщений об авариях) транспортного средства в том случае, когда столкновение между транспортным средством 10 и объектом обнаружено блоком обнаружения столкновения (датчиком 34 давления, блоком 46 определения давления), и блок 52 управления тормозом, который поддерживает включенное состояние тормоза (тормозного устройства 30) во время выдачи уведомления блоком уведомления (блоком 50 управления уведомлением, устройством 28 уведомления).
Кроме того, настоящий вариант осуществления включает в себя этап обнаружения столкновения (этап S5), состоящий в обнаружении столкновения между транспортным средством 10 и объектом, этап уведомления (этап S8), состоящий в выдаче уведомления во внешнюю среду транспортного средства в том случае, если столкновение между транспортным средством 10 и объектом обнаружено с помощью этапа обнаружения столкновения (этапа S5), и этап поддержания тормоза (этап S9), состоящий в поддержании включенного состояния тормозного устройства 30 во время выдачи уведомления на этапе уведомления (этапе S8).
В соответствии с настоящим вариантом осуществления, возможно обеспечение уведомления во внешнюю организацию, такую как центр 14 сообщений об авариях, сразу же после столкновения транспортного средства 10, а во время периода, когда осуществляется уведомление, возможно предотвращение увеличения аварии из-за перемещения транспортного средства 10. Кроме того, поскольку поддерживается включенное состояние тормозного устройства 30, и транспортное средство 10 неспособно перемещаться во время уведомления, скрывание неблагонамеренного водителя с места аварии может быть предотвращено.
Кроме того, в настоящем варианте осуществления блок 52 управления тормозом может освобождать поддержание включенного состояния тормозного устройства 30 после завершения уведомления блоком уведомления (блоком 50 управления уведомлением, устройством 28 уведомления). В настоящем варианте осуществления ввиду того, что тормозное устройство 30 освобождается по завершении уведомления, возможна надежная выдача уведомления в центр 14 сообщений об авариях. Кроме того, возможно надежное предотвращение скрывания неблагонамеренного водителя с места аварии.
Настоящий вариант осуществления дополнительно снабжен блоком 38 распознавания объекта, который распознает объект. Блок уведомления (блок 50 управления уведомлением, устройство 28 уведомления) выдает уведомление во внешнюю среду транспортного средства в том случае, когда объект, распознанный блоком 38 распознавания объекта, является человеком. Кроме того, блок 52 управления тормозом поддерживает включенное состояние тормозного устройства 30 в том случае, когда объект, распознанный блоком 38 распознавания объекта, является человеком. В соответствии с настоящим вариантом осуществления, в том случае, когда объект, столкнувшийся с транспортным средством 10, является человеком, поддерживается включенное состояние тормозного устройства 30 наряду с обеспечением уведомления в центр 14 сообщений об авариях, и, следовательно, пострадавшему может быть своевременно оказана помощь. Кроме того, так называемое преступление, виновник которого скрывается, может быть предотвращено.
Кроме того, в соответствии с настоящим вариантом осуществления, соединение связи поддерживается до тех пор, пока оператор со стороны центра 14 сообщений об авариях не приостановит связь. Таким образом, поскольку обеспечивается невозможность приостановки связи со стороны водителя, может быть надежно предотвращено скрывание неблагонамеренного водителя с места аварии.
[Другие варианты осуществления]
Настоящее изобретение не ограничено рассмотренными выше вариантами осуществления, и само собой разумеется, что в нем могут применяться различные конфигурации в пределах сущности настоящего изобретения. Например, в вышеописанном варианте осуществления, как указано на этапе S6 на фиг. 2, необходимость в обеспечении уведомления определяется на основе того, является ли объект, который столкнулся с транспортным средством 10, человеком. Однако необходимость в обеспечении уведомления может определяться на основе других условий помимо того, является ли объект человеком.
Кроме того, может быть также исключена сама оценка, указанная на этапе S6 на фиг. 2, необходимости обеспечения уведомления. В этом случае соединение связи с центром 14 сообщений об авариях устанавливается в момент времени, когда транспортное средство 10 сталкивается с любым типом объекта.
В вышеописанном варианте осуществления несмотря на то, что соединение связи устанавливается между устройством 28 уведомления и центром 14 сообщений об авариях, когда происходит столкновение, в это время информация об аварии, касающаяся транспортного средства 10, может также автоматически передаваться в центр 14 сообщений об авариях. При аварии с причинением вреда самому себе возникают случаи, в которых водитель не может совершать телефонный звонок и управлять транспортным средством 10. Даже в таких случаях может осуществляться сообщение об аварии при одновременном поддержании включенного состояния тормозного устройства 30.
В вышеописанном варианте осуществления центр 14 сообщений об авариях автоматически уведомляется во время возникновения столкновения. Однако уведомление может также осуществляться непосредственно в другие внешние организации, такие как пожарная часть 16, отделение 18 полиции, больница 20 и т.п.
Кроме того, в вышеописанном варианте осуществления столкновение между транспортным средством 10 и объектом определяется датчиком 34 давления и блоком 46 определения столкновения. Однако столкновение может обнаруживаться датчиком 36 обнаружения объекта, блоком 38 распознавания объекта и блоком 40 прогнозирования столкновения. Например, в момент времени, когда расстояние между транспортным средством 10 и объектом, распознаваемым блоком 38 распознавания объекта, становится практически нулевым, блок 40 прогнозирования столкновения оценивает, что произошло столкновение.
Кроме того, в вышеописанном варианте осуществления, как показано на этапах S3 и S4 на фиг. 2, тормозное устройство 30 автоматически включается с целью предотвращения столкновения до того, как произойдет столкновение. Однако тормозное устройство 30 может включаться автоматически в случае возникновения столкновения. В таком случае процессы этапа S3 и этапа S7 становятся ненужными. Кроме того, порядок процесса этапа S4 и процесса этапа S5 изменяется. Кроме того, блок 40 прогнозирования столкновения и блок 42 выдачи команды включения тормоза, изображенные на фиг. 1, становятся ненужными.
Кроме того, при использовании вышеописанного варианта осуществления SW 14a предусматривается со стороны центра 14 сообщений об авариях для приостановки связи. Однако может предусматриваться переключение для приостановки связи со стороны транспортного средства 10.
Группа изобретений относится к устройству и способу для управления торможением, предназначенным для автоматического включения тормоза до столкновения и после столкновения. При обнаружении столкновения между транспортным средством и физическим объектом блок управления уведомлением передает команду в устройство уведомления. После приема команды устройство уведомления передает информацию во внешний центр уведомления об авариях. В то время как устройство уведомления уведомляет центр уведомления об авариях, блок управления тормозом поддерживает включенное состояние тормозного устройства и останавливает транспортное средство. Обеспечивается предотвращение аварий после столкновения транспортного средства. 2 н. и 4 з.п. ф-лы, 2 ил. 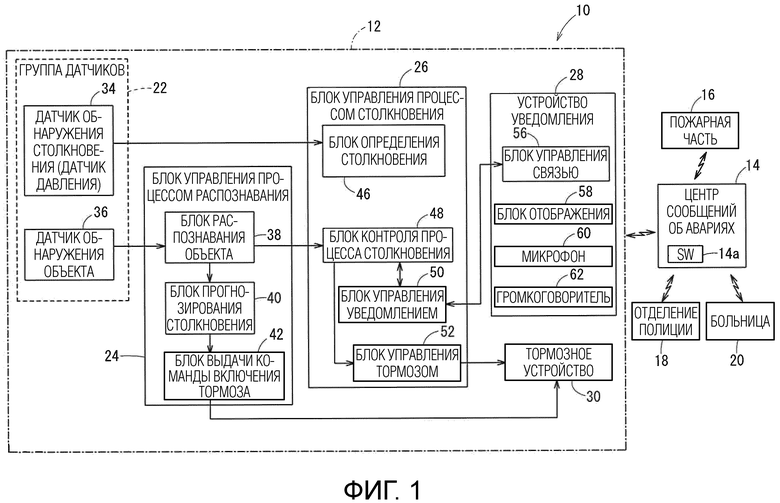
1. Устройство (12) для управления торможением, предназначенное для автоматического включения тормоза (30) до столкновения и после столкновения между транспортным средством (10) и объектом, содержащее:
блок (34, 46) обнаружения столкновения, выполненный с возможностью обнаружения столкновения между транспортным средством (10) и объектом;
блок (50, 28) уведомления, выполненный с возможностью выдачи уведомления во внешнюю среду (14) транспортного средства (10) в том случае, если столкновение между транспортным средством (10) и объектом обнаружено блоком (34, 46) обнаружения столкновения; и
блок (52) управления тормозом, выполненный с возможностью поддержания включенного состояния тормоза (30) во время выдачи уведомления блоком (50, 28) уведомления.
2. Устройство (12) для управления торможением по п. 1, отличающееся тем, что блок (52) управления тормозом выполнен с возможностью освобождения поддержания включенного состояния тормоза (30) после завершения уведомления блоком (50, 28) уведомления.
3. Устройство (12) для управления торможением по п. 1 или 2, дополнительно содержащее:
блок (38) распознавания объекта, выполненный с возможностью распознавания объекта;
при этом блок (50, 28) уведомления выполнен с возможностью выдачи уведомления во внешнюю среду (14) транспортного средства (10) в том случае, когда объект, распознанный блоком (38) распознавания объекта, является человеком; и
блок (52) управления тормозом выполнен с возможностью поддержания включенного состояния тормоза (30) в том случае, когда объект, распознанный блоком (38) распознавания объекта, является человеком.
4. Способ управления торможением, с помощью которого тормоз (30) автоматически включается до столкновения и после столкновения между транспортным средством (10) и объектом, включающий в себя:
этап обнаружения столкновения, состоящий в обнаружении столкновения между транспортным средством (10) и объектом;
этап уведомления, состоящий в выдаче уведомления во внешнюю среду (14) транспортного средства (10) в том случае, если столкновение между транспортным средством (10) и объектом обнаружено с помощью этапа обнаружения столкновения; и
этап поддержания тормоза, состоящий в поддержании включенного состояния тормоза (30) во время выдачи уведомления на этапе уведомления.
5. Способ управления торможением по п. 4, дополнительно включающий в себя этап освобождения тормоза, состоящий в освобождении поддержания включенного состояния тормоза (30) после завершения уведомления с помощью этапа уведомления.
6. Способ управления торможением по п. 4 или 5, дополнительно включающий в себя:
этап распознавания объекта, состоящий в распознавании объекта;
при этом на этапе уведомления уведомление выдается во внешнюю среду (14) транспортного средства (10) в том случае, когда объект, распознанный с помощью этапа распознавания объекта, является человеком; при этом
на этапе поддержания тормоза включенное состояние тормоза (30) поддерживается в том случае, когда распознанный объект является человеком.
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ, ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2010 |
|
RU2484993C1 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2543123C2 |
| Устройство для внесения органических и минеральных удобрений непосредственно в борозду | 1959 |
|
SU127498A1 |
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА КОНТРОЛЯ НАД УЧАСТНИКАМИ ДОРОЖНОГО ДВИЖЕНИЯ И ПРЕДУПРЕЖДЕНИЯ ВОЗНИКНОВЕНИЯ ЧРЕЗВЫЧАЙНЫХ СИТУАЦИЙ ПРИ ДОРОЖНОМ ДВИЖЕНИИ | 2006 |
|
RU2324980C1 |

