ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится к автономной системе вождения и способу управления такой системой.
ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
[0002] Настоящий документ заявляет приоритет патентной заявки Японии №2018-100893, поданной 25 мая 2018 года, полное содержание которой включено в настоящий документ путем отсылки.
УРОВЕНЬ ТЕХНИКИ
[0003] В уровне техники известна не прошедшая экспертизу опубликованная патентная заявка Японии №2016-24572, в которой раскрыта автономная система вождения. Согласно этой публикации, система распознавания сигнала регулирования дорожного движения, используемая для автономного вождения, распознает сигнал регулирования дорожного движения, подаваемый в области перед транспортным средством, из положения, в котором транспортное средство может остановиться.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0004] В данном случае поддержание идеальной точности распознавания сигналов регулирования дорожного движения или иных подобных сигналов при автономном вождении достаточно затруднительно. Поэтому даже при автономном вождении желательно получить решение водителя в соответствующем положении.
[0005] Согласно первому аспекту настоящего изобретения, предложена автономная система вождения, выполненная с возможностью автономного управления транспортным средством, причем система содержит блок запроса сигнала запуска, выполненный с возможностью запроса ввода сигнала запуска от водителя транспортного средства с целью обеспечения прохождения транспортного средства через целевую точку, если автономно управляемое транспортное средство приближается к предварительно заданной целевой точке, расположенной на маршруте движения транспортного средства, блок распознавания ввода сигнала запуска, выполненный с возможностью распознавания сигнала запуска, поданного водителем, и блок управления транспортным средством, выполненный с возможностью обеспечения прохождения транспортного средства через целевую точку, если будет распознан ввод сигнала запуска, или замедления и остановки транспортного средства без прохождения через целевую точку, если ввод сигнала запуска не будет распознан.
[0006] В соответствии с автономной системой вождения по первому аспекту настоящего изобретения, когда автономно управляемое транспортное средство приближается к целевой точке, в частности, перекрестку, от водителя потребуется подать сигнал запуска, инициирующий прохождение транспортного средства через целевую точку, и транспортное средство пройдет через целевую точку, если будет распознан ввод сигнала запуска, или замедлится и остановится в целевой точке, не проходя через целевую точку, если ввод сигнала запуска не будет обнаружен. Следовательно, автономная система вождения позволяет инициировать прохождение транспортного средства через целевую точку после того, как будет получено решение водителя о прохождении через целевую точку или остановке.
[0007] В автономной системе вождения согласно аспекту настоящего изобретения блок управления транспортным средством может быть выполнен с возможностью инициации прохождения транспортного средства через целевую точку без замедления транспортного средства, если перед началом замедления транспортного средства, выполняемого с целью остановки транспортного средства без прохождения через целевую точку, будет распознан ввод сигнала запуска.
[0008] В автономной системе вождения согласно аспекту настоящего изобретения блок управления транспортным средством может быть выполнен с возможностью прекращения замедления транспортного средства и инициации прохождения через целевую точку, если после начала замедления транспортного средства, выполняемого с целью остановки транспортного средства без прохождения через целевую точку, будет распознан ввод сигнала запуска.
[0009] Автономная система вождения согласно аспекту настоящего изобретения может содержать блок распознавания сигнала регулирования дорожного движения, выполненный с возможностью распознавания состояния работы сигнала регулирования дорожного движения, расположенного в целевой точке и соответствующего маршруту движения транспортного средства. Блок запроса сигнала запуска может быть выполнен с возможностью уведомления водителя о том, что распознан сигнал регулирования дорожного движения, не разрешающий движение, и с возможностью повторного запроса ввода сигнала запуска, если распознан сигнал регулирования дорожного движения, не разрешающий движение, и ввод сигнала запуска. Блок управления транспортным средством может быть выполнен с возможностью инициации прохождения транспортного средства через целевую точку, если будет распознан ввод сигнала запуска после повторного запроса ввода сигнала запуска, и с возможностью инициации замедления и остановки автономно управляемого транспортного средства без прохождения через целевую точку, если ввод сигнала запуска не будет распознан после повторного запроса ввода сигнала запуска.
[0010] В автономной системе вождения согласно аспекту настоящего изобретения блок запроса сигнала запуска может быть выполнен с возможностью уведомления водителя о том, что распознано переключение сигнала регулирования дорожного движения в состояние, отличающееся от состояния разрешения движения, и с возможностью повторного запроса ввода сигнала запуска, если будет распознано переключение сигнала регулирования дорожного движения в состояние, отличающееся от состояния разрешения движения, после распознавания ввода сигнала запуска. Блок управления транспортным средством может быть выполнен с возможностью инициации прохождения транспортного средства через целевую точку, если будет распознан ввод сигнала запуска после повторного запроса ввода сигнала запуска, и с возможностью инициации замедления и остановки автономно управляемого транспортного средства без прохождения через целевую точку, если ввод сигнала запуска не будет распознан после повторного запроса ввода сигнала запуска.
[0011] В автономной системе вождения согласно аспекту настоящего изобретения блок обнаружения ввода сигнала запуска может быть выполнен с возможностью распознавания в качестве ввода сигнала запуска, по меньшей мере, двух из следующих операций: осуществление водителем ручного управления блоком ввода сигнала запуска в транспортном средстве, нажатие водителем педали акселератора транспортного средства и прикосновение водителя к сенсорному датчику транспортного средства. При повторном запросе ввода сигнала запуска блок запроса сигнала запуска может быть выполнен с возможностью запроса от водителя управляющего действия, отличающегося от ввода сигнала запуска перед повторным запросом.
[0012] Согласно следующему аспекту настоящего изобретения, предложен способ управления автономной системой вождения, осуществляющей автономное управление транспортным средством, причем способ содержит следующие этапы: запрос ввода сигнала запуска от водителя транспортного средства с целью обеспечения прохождения транспортного средства через целевую точку, если автономно управляемое транспортное средство приближается к предварительно заданной целевой точке; распознавание ввода сигнала запуска, выполненного водителем; и управление автономно управляемым транспортным средством с целью обеспечения прохождения через целевую точку, если будет распознан ввод сигнала запуска, или замедления и остановки транспортного средства без прохождения через целевую точку, если ввод сигнала запуска не будет распознан.
[0013] В соответствии со способом управления автономной системой вождения согласно следующему аспекту настоящего изобретения, когда автономно управляемое транспортное средство приближается к целевой точке, в частности, перекрестку, от водителя потребуется подать сигнал запуска, инициирующий прохождение транспортного средства через целевую точку, и транспортное средство пройдет через целевую точку, если будет распознан ввод сигнала запуска, или замедлится и остановится в целевой точке, не проходя через целевую точку, если ввод сигнала запуска не будет обнаружен. Следовательно, способ управления автономной системой вождения позволяет инициировать прохождение транспортного средства через целевую точку после того, как будет получено решение водителя о прохождении через целевую точку или остановке.
[0014] Согласно способу управления автономной системой вождения по следующему аспекту настоящего изобретения, на этапе управления транспортным средством может быть инициировано прохождение транспортного средства через целевую точку без замедления транспортного средства, если перед началом замедления транспортного средства, выполняемого с целью остановки транспортного средства без прохождения через целевую точку, будет распознан ввод сигнала запуска.
[0015] Согласно способу управления автономной системой вождения по следующему аспекту настоящего изобретения, на этапе управления транспортным средством может быть инициировано прекращение замедления транспортного средства и прохождение через целевую точку, если после начала замедления транспортного средства, выполняемого с целью остановки транспортного средства без прохождения через целевую точку, будет распознан ввод сигнала запуска.
[0016] Способ управления автономной системой вождения по следующему аспекту настоящего изобретения может дополнительно содержать следующие этапы: распознавание состояния работы сигнала регулирования дорожного движения, находящегося в целевой точке и соответствующего маршруту движения транспортного средства; и первый повторный запрос для уведомления водителя о распознавании сигнала регулирования дорожного движения, не разрешающего движение, и выполнения повторного запроса ввода сигнала запуска, если распознан сигнал регулирования дорожного движения, не разрешающий движение, и ввод сигнала запуска. На этапе управления транспортным средством может быть инициировано прохождение транспортного средства через целевую точку, если будет распознан ввод сигнала запуска после повторного запроса ввода сигнала запуска, и замедление и остановка автономно управляемого транспортного средства без прохождения через целевую точку, если ввод сигнала запуска не будет распознан после повторного запроса ввода сигнала запуска.
[0017] Способ управления автономной системой вождения по следующему аспекту настоящего изобретения может дополнительно содержать следующие этапы: второй повторный запрос для уведомления водителя о том, что распознано переключение сигнала регулирования дорожного движения в состояние, отличающееся от состояния разрешения движения, и выполнение повторного запроса ввода сигнала запуска, если будет распознано переключение сигнала регулирования дорожного движения в состояние, отличающееся от состояния разрешения движения, после распознавания ввода сигнала запуска. На этапе управления транспортным средством может быть инициировано прохождение транспортного средства через целевую точку, если будет распознан ввод сигнала запуска после повторного запроса ввода сигнала запуска, и замедление и остановка автономно управляемого транспортного средства без прохождения через целевую точку, если ввод сигнала запуска не будет распознан после повторного запроса ввода сигнала запуска.
[0018] Согласно способу управления автономной системой вождения по следующему аспекту настоящего изобретения, на этапе обнаружения ввода сигнала запуска в качестве ввода сигнала запуска могут быть распознаны, по меньшей мере, две из следующих операций: осуществление водителем ручного управления блоком ввода сигнала запуска в транспортном средстве, нажатие водителем педали акселератора транспортного средства и прикосновение водителя к сенсорному датчику транспортного средства. На этапе запроса ввода сигнала запуска при повторном запросе ввода сигнала запуска от водителя может быть запрошено управляющее действие, отличающееся от ввода сигнала запуска перед повторным запросом.
[0019] Как было описано выше, автономная система вождения по первому аспекту настоящего изобретения и способ управления автономной системой вождения по следующему аспекту настоящего изобретения позволяют обеспечить прохождение транспортного средства через целевую точку после получения от водителя решения о прохождении целевой точки или остановке.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0020] На ФИГ. 1 изображена блок-схема, иллюстрирующая автономную систему вождения в соответствии с первым вариантом осуществления.
На ФИГ. 2A представлена схема, иллюстрирующая ситуацию, в которой транспортное средство приближается к перекрестку, на котором сигнал регулирования дорожного движения находится в состоянии, разрешающем движение.
На ФИГ. 2B изображен график, иллюстрирующий профиль скорости транспортного средства при распознавании ввода сигнала запуска.
На ФИГ. 3A представлена схема, иллюстрирующая ситуацию, в которой транспортное средство приближается к перекрестку, на котором сигнал регулирования дорожного движения находится в состоянии, запрещающем движение.
На ФИГ. 3B изображен график, иллюстрирующий профиль скорости транспортного средства при отсутствии распознавания ввода сигнала запуска.
На ФИГ. 4A представлена схема, иллюстрирующая ситуацию, в которой транспортное средство приближается к перекрестку, на котором сигнал регулирования дорожного движения находится в состоянии, разрешающем движение.
На ФИГ. 4B изображен график, иллюстрирующий профиль скорости транспортного средства при распознавании отмены сигнала запуска после ввода сигнала запуска.
На ФИГ. 5A представлена схема, иллюстрирующая ситуацию, в которой транспортное средство приближается к перекрестку, на котором сигнал регулирования дорожного движения находится в состоянии, разрешающем движение.
На ФИГ. 5B изображен график, иллюстрирующий профиль скорости транспортного средства при распознавании ввода сигнала запуска после начала замедления транспортного средства.
На ФИГ. 6A представлена схема, иллюстрирующая ситуацию, в которой транспортное средство приближается к перекрестку, на котором сигнал регулирования дорожного движения находится в состоянии, запрещающем движение.
На ФИГ. 6B изображен график, иллюстрирующий профиль скорости транспортного средства, когда повторный запрос ввода сигнала запуска выполняется после ввода сигнала запуска.
На ФИГ. 7A представлена схема, иллюстрирующая ситуацию, в которой транспортное средство приближается к перекрестку, на котором сигнал регулирования дорожного движения находится в состоянии, разрешающем движение.
На ФИГ. 7B изображен график, иллюстрирующий профиль скорости транспортного средства при распознавании ввода сигнала запуска после выполнения повторного запроса ввода сигнала запуска.
На ФИГ. 8A представлена схема, иллюстрирующая ситуацию, в которой сигнал регулирования дорожного движения переключается в состояние, отличающееся от состояния разрешения движения, когда транспортное средство приближается к перекрестку.
На ФИГ. 8B изображен график, иллюстрирующий профиль скорости транспортного средства при распознавании ввода сигнала запуска после выполнения повторного запроса ввода сигнала запуска на основании переключения сигнала регулирования дорожного движения.
На ФИГ. 9A представлена схема, иллюстрирующая ситуацию, в которой сигнал регулирования дорожного движения переключается в состояние, разрешающее движение, когда транспортное средство приближается к перекрестку.
На ФИГ. 9B изображен график, иллюстрирующий профиль скорости транспортного средства, когда первый ввод сигнала запуска распознается после уведомления о переключении сигнала регулирования дорожного движения в состояние, разрешающее движение, после начала замедления транспортного средства, осуществленного в отсутствие распознанного ввода сигнала запуска.
На ФИГ. 10A представлена схема, иллюстрирующая ситуацию, в которой транспортное средство намеревается повернуть вправо на перекрестке, на котором отсутствует сигнал регулирования дорожного движения.
На ФИГ. 10B изображен график, иллюстрирующий профиль скорости транспортного средства при распознавании ввода сигнала запуска.
На ФИГ. 11A представлена схема, иллюстрирующая ситуацию, в которой транспортное средство намеревается повернуть вправо на перекрестке, на котором отсутствует сигнал регулирования дорожного движения.
На ФИГ. 11B изображен график, иллюстрирующий профиль скорости транспортного средства при отсутствии распознавания ввода сигнала запуска.
На ФИГ. 12 изображена блок-схема, иллюстрирующая обработку траектории остановки.
На ФИГ. 13 изображена блок-схема, иллюстрирующая обработку обнаружения ввода сигнала запуска для целевой точки, где имеется сигнал регулирования дорожного движения.
На ФИГ. 14 изображена блок-схема, иллюстрирующая дополнительную обработку после ввода сигнала запуска.
На ФИГ. 15 изображена блок-схема, иллюстрирующая дополнительную обработку после выполнения движения по заданной траектории.
На ФИГ. 16 изображена блок-схема, иллюстрирующая дополнительную обработку после выполнения остановки по заданной траектории.
На ФИГ. 17 изображена блок-схема, иллюстрирующая обработку обнаружения ввода сигнала запуска для целевой точки, где отсутствует сигнал регулирования дорожного движения.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[0021] Ниже по тексту будут раскрыты варианты осуществления предложенного изобретения со ссылкой на прилагаемые чертежи.
[0022] На ФИГ. 1 представлена блок-схема, иллюстрирующая автономную систему вождения в соответствии с первым вариантом осуществления. Автономная система вождения 100, изображенная на ФИГ. 1, установлена на транспортном средстве, в частности, легковом автомобиле, и осуществляет автономное управление транспортным средством. Автономная система 100 вождения инициирует автономное управление транспортным средством, когда пассажир выполняет операцию запуска автономного вождения (в частности, нажатие кнопки запуска автономного вождения, голосовой ввод или иную подобную операцию). Под автономным вождением понимают управление транспортным средством, при котором транспортное средство автоматически движется к заданному пункту назначения. При автономном вождении водителю не нужно выполнять управляющие действия, и транспортное средство движется автоматически.
[0023] Когда автономно движущееся транспортное средство приближается к целевой точке, например, перекрестку, автономная система 100 вождения запрашивает у водителя ввод сигнала запуска для прохождения через целевую точку. Автономная система 100 вождения инициирует прохождение транспортного средства через целевую точку, если распознан ввод сигнала запуска, осуществленный водителем, и остановку транспортного средства без прохождения через целевую точку, если ввод сигнала запуска не распознан. Подробная информация о целевой точке и вводе сигнала запуска будет приведена ниже.
Конфигурация автономной системы вождения
[0024] Как показано на ФИГ. 1, автономная система 100 вождения содержит электронный блок 10 управления (ЭБУ), осуществляющий общее управление системой. ЭБУ 10 представляет собой электронный блок управления, содержащий центральный процессор (ЦП), постоянное запоминающее устройство (ПЗУ), оперативное запоминающее устройство (ОЗУ) и прочие компоненты. Например, в ЭБУ 10 различные функции реализуются путем загрузки в ОЗУ программы, хранящейся в ПЗУ, и ее исполнения посредством ЦП. ЭБУ 10 может содержать несколько электронных блоков.
[0025] ЭБУ 10 соединен с GPS-приемником 1, внешним устройством считывания 2, внутренним устройством считывания 3, базой 4 картографических данных, датчиком 5 педали акселератора, сенсорным датчиком 6 рулевого управления, камерой 7 съемки водителя, человеко-машинным интерфейсом (HMI) 8 и приводом 9.
[0026] GPS-приемник 1 определяет положение транспортного средства (например, широту и долготу транспортного средства) на основании сигналов от трех и более спутников GPS. GPS-приемник 1 передает информацию о найденном положении транспортного средства в ЭБУ 10.
[0027] Внешнее устройство считывания 2 представляет собой устройство распознавания среды вокруг транспортного средства. Внешнее устройство считывания 2 содержит, по меньшей мере, одну видеокамеру и один радиолокационный датчик.
[0028] Камера представляет собой устройство визуализации, отображающее ситуацию вокруг транспортного средства. Камера установлена на внутренней стороне лобового стекла транспортного средства. Камера передает видеоинформацию о ситуации вокруг транспортного средства в ЭБУ 10. Камера может представлять собой монокулярную или стереокамеру.
[0029] Под радиолокационным датчиком понимают устройство обнаружения, обнаруживающее объекты в зоне вокруг транспортного средства с использованием радиоволн (например, миллиметровых волн) или волн светового диапазона. Радиолокационный датчик представляет собой, например, по меньшей мере, миллиметровый радар или лазерный локатор (LIDAR). Радиолокационный датчик посылает радиоволны или волны светового диапазона в среду вокруг транспортного средства и обнаруживает объекты, принимая радиоволны или волны светового диапазона, отраженные объектами. Радиолокационный датчик передает информацию об обнаруженном объекте в ЭБУ 10. Под объектами понимают неподвижные объекты, в частности, ограждения и здания, а также движущиеся объекты, в частности, пешеходы, велосипеды и другие транспортные средства. Внешнее устройство считывания 2 не обязательно должно содержать радиолокационный датчик.
[0030] Внутреннее устройство считывания 3 представляет собой устройство обнаружения, распознающее состояние транспортного средства при движении. Внутреннее устройство считывания 3 содержит датчик скорости транспортного средства, датчик ускорения и датчик скорости рыскания. Датчик скорости транспортного средства представляет собой измерительное устройство, определяющее скорость транспортного средства. В качестве датчика скорости транспортного средства используют, например, датчик частоты вращения колеса транспортного средства, установленный на колесах транспортного средства или на вращающемся ведущем валу, составляющем единое целое с колесами транспортного средства, и измеряющий частоту вращения колес транспортного средства. Датчик скорости транспортного средства передает измеренную скорость транспортного средства в ЭБУ 10.
[0031] Датчик ускорения представляет собой измерительное устройство, определяющее ускорение транспортного средства. Например, датчик ускорения содержит датчик продольного ускорения, измеряющий ускорение в продольном направлении транспортного средства, и датчик бокового ускорения, измеряющий боковое ускорение транспортного средства. Датчик ускорения, например, передает информацию об ускорении транспортного средства в ЭБУ 10. Датчик скорости рыскания представляет собой измерительное устройство, измеряющее скорость рыскания (скорость углового вращения) вокруг вертикальной оси в центре тяжести транспортного средства. Например, в качестве датчика скорости рыскания может использоваться гироскопический датчик. Датчик скорости рыскания передает информацию об измеренной скорости рыскания транспортного средства в ЭБУ 10.
[0032] База 4 картографических данных представляет собой базу данных, в которой хранится картографическая информация. База 4 картографических данных сформирована, например, на жестком диске [HDD], установленном в транспортном средстве. Под картографической информацией понимают информацию о положении в полосе движения, информацию о форме полосы движения (например, искривленности, ширине и иных параметрах), информацию о положении на стоп-линии, информацию о положении точек слияния и ответвления, а также информацию о положении зданий. Кроме того, к картографической информации относится информация о скорости, в частности, о разрешенной скорости, связанная с положением или участком на карте. Картографическая информация содержит информацию о положении ориентиров, в частности, фонарных столбов, используемых для определения положения транспортного средства. База 4 картографических данных может храниться на сервере, например, в центре управления, способном устанавливать соединение с транспортным средством.
[0033] Данные, относящиеся к целевой точке, которая будет описана ниже, могут быть предварительно сохранены в базе 4 картографических данных. В базе 4 картографических данных могут храниться, например, данные о том, является ли положение на карте кандидатом для целевой точки. Данные, относящиеся к целевой точке, могут храниться в базе данных, отличающейся от базы 4 картографических данных. Данные, относящиеся к целевой точке, могут отсутствовать в базе данных в транспортном средстве и передаваться с удаленного сервера данных посредством функции передачи данных.
[0034] Датчик 5 педали акселератора представляет собой датчик, распознающий нажатие педали акселератора водителем. Датчик 5 педали акселератора установлен на педали акселератора транспортного средства и измеряет количество операций с педалью акселератора, выполненных водителем. Датчик 5 педали акселератора передает сигнал использования акселератора, соответствующий количеству операций с педалью акселератора, выполненных водителем, в ЭБУ 10.
[0035] Сенсорный датчик 6 рулевого управления установлен на рулевом колесе и распознает прикосновение водителя. В качестве сенсорного датчика 6 рулевого управления можно использовать, например, сенсорный датчик емкостного типа. Сенсорный датчик 6 рулевого управления передает сигнал контакта в ЭБУ 10, когда водитель прикасается к рулевому колесу. Сенсорный датчик 6 рулевого управления может быть предусмотрен на левой и правой сторонах рулевого колеса, что позволяет определить, что водитель взялся за рулевое колесо обеими руками. Кроме того, сенсорный датчик 6 рулевого управления может быть выполнен с возможностью определения усилия, с которым водитель берется за рулевое колесо.
[0036] Камера 7 съемки водителя представляет собой устройство формирования изображения, снимающее изображение водителя транспортного средства. Камера 7 съемки водителя установлена, например, перед водителем на корпусе рулевой колонки транспортного средства и снимает водителя. Может быть предусмотрено несколько камер 7 съемки водителя, которые будут снимать водителя с нескольких ракурсов. Камера 7 съемки водителя передает видеосъемку водителя в ЭБУ 10.
[0037] HMI (человеко-машинный интерфейс) 8 представляет собой устройство, осуществляющее ввод и вывод информации между автономной системой 100 вождения и пассажирами. HMI 8 содержит, например, дисплей, динамик и иные подобные устройства. HMI 8 инициирует непрерывное свечение или мигание лампы на приборной панели, вывод изображения на дисплей и вывод звука из динамика в соответствии с управляющим сигналом ЭБУ 10. Дисплей может представлять собой дисплей головного устройства.
[0038] HMI 8 содержит различные блоки ввода для приема данных, вводимых пассажирами. HMI 8 может содержать блок ввода команды на запуск автономного вождения транспортного средства и блок ввода команды на завершение автономного вождения. Блоки ввода команд на запуск и завершение автономного вождения могут представлять собой кнопки или рычаги, причем их исполнение не регламентировано. Один блок ввода можно использовать для подачи команды, как на запуск, так и на завершение автономного вождения. HMI 8 может иметь функцию распознавания голоса (голосовой ввод).
[0039] HMI 8 содержит блок 8а ввода сигнала запуска, позволяющий водителю вручную выполнить ввод сигнала запуска. Блок 8а ввода сигнала запуска может быть кнопочного или рычажного типа, и его исполнение не регламентировано при условии, что он может управляться водителем вручную. Блок 8а ввода сигнала запуска находится, например, на приборной панели, рулевой колонке или полу. Блок 8а ввода сигнала запуска может также служить в качестве другого блока ввода, например, блок ввода команды на запуск автономного вождения.
[0040] HMI 8 содержит блок 8b отмены сигнала запуска, позволяющий водителю вручную отменить сигнал запуска. Блок 8b отмены сигнала запуска может быть кнопочного или рычажного типа, и его исполнение не регламентировано при условии, что он может управляться водителем вручную. Блок 8а ввода сигнала запуска находится, например, на приборной панели, рулевой колонке или полу. Блок 8b отмены сигнала запуска может также служить в качестве другого блока ввода, например, блока ввода команды на завершение автономного вождения, а также в качестве блока 8а ввода сигнала запуска. Например, сигнал отмены может быть введен путем перевода в нижнее положение переключателя рычажного типа блока 8а ввода в направлении, отличающемся от ввода сигнала запуска. Кроме того, сигнал отмены может быть также введен длительным нажатием переключателя кнопочного типа блока 8а ввода в течение времени, превышающего определенный период. Кроме того, сигнал запуска может быть подан, если водитель продолжает управлять блоком 8а ввода сигнала запуска (например, продолжает нажимать на переключатель кнопочного типа или продолжает удерживать переключатель рычажного типа в нижнем положении), или отменен, если водитель отпускает переключатель блока 8а ввода.
[0041] Привод 9 представляет собой устройство, используемое для управления транспортным средством. Привод 9 содержит, по меньшей мере, привод дроссельной заслонки, привод тормозного механизма и привод рулевого управления. Привод дроссельной заслонки управляет энергией движения транспортного средства за счет управления количеством воздуха (степень открытия дроссельной заслонки), подаваемого в двигатель, в соответствии с управляющим сигналом ЭБУ 10. Если речь идет о гибридном транспортном средстве, то дополнительно к количеству воздуха, подаваемого в двигатель, управляющий сигнал ЭБУ 10 поступает на двигатель, служащий источником энергии, и управляет энергией движения транспортного средства. Если речь идет об электрическом транспортном средстве, то вместо привода дроссельной заслонки управляющий сигнал ЭБУ 10 поступает на двигатель, служащий источником энергии, и управляет энергией движения транспортного средства. В таких случаях двигатель в качестве источника энергии определяет конструкцию привода 9.
[0042] Привод тормозного механизма управляет тормозной системой в соответствии с управляющим сигналом ЭБУ 10 и регулирует тормозное усилие, прилагаемое к колесам транспортного средства. Например, в качестве тормозной системы можно использовать гидравлическую тормозную систему. Привод рулевого управления управляет сервоприводом, развивающим крутящий момент электрической системы рулевого управления в соответствии с управляющим сигналом ЭБУ 10.
[0043] Далее будет описана функциональная конфигурация ЭБУ 10. ЭБУ 10 содержит блок 11 распознавания положения транспортного средства, блок 12 распознавания среды вокруг транспортного средства, блок 13 распознавания статуса движения, блок 14 определения положения, блок 15 формирования маршрута, блок 16 запроса сигнала запуска, блок 17 распознавания ввода сигнала запуска, блок 18 распознавания сигнала регулирования дорожного движения и блок 19 управления транспортным средством. Часть функций вышеописанного ЭБУ 10 может выполняться сервером, выполненным с возможностью установления связи с транспортным средством.
[0044] Блок 11 распознавания положения транспортного средства определяет положение транспортного средства на карте на основании информации о позиционировании с GPS-приемника 1 и картографической информации в базе 4 картографических данных. Кроме того, блок 11 распознавания положения транспортного средства получает информацию о положении маркированного объекта, входящую в картографическую информацию в базе 4 картографических данных, и определяет положение транспортного средства с высокой точностью, используя результат обнаружения внешним устройством считывания 2 одновременно с локализацией и технологией позиционирования (SLAM). Блок 11 распознавания положения транспортного средства способен распознавать положение транспортного средства на карте, используя известный способ.
[0045] Блок 12 распознавания среды вокруг транспортного средства распознает ситуацию вокруг транспортного средства на основании результата обнаружения (информации об объекте, полученной от радиолокационного датчика, и/или видеоинформации с камеры), выполненного внешним устройством считывания 2. Среда вокруг транспортного средства включает в себя положение объектов вокруг транспортного средства. Положение объекта описывается, например, относительным положением и относительной скоростью объекта относительно транспортного средства. Среда вокруг транспортного средства может включать в себя результаты распознавания границ полосы движения (линий, ограничивающих полосу движения, осевой линии и т.п.) вокруг транспортного средства. Блок 12 распознавания среды вокруг транспортного средства распознает относительное положение границы полосы движения относительно транспортного средства посредством хорошо известного способа распознавания белой линии на основании результатов обнаружения внешнего устройства считывания 2.
[0046] Блок 13 распознавания статуса движения определяет статус движения транспортного средства на основании результата измерения, выполненного внутренним устройством считывания 3. Статус движения включает в себя скорость, ускорение и скорость рыскания транспортного средства. В частности, блок 13 распознавания статуса движения определяет скорость транспортного средства на основании информации, полученной от датчика скорости транспортного средства. Блок 13 распознавания статуса движения определяет ускорение (продольное и поперечное ускорение) транспортного средства на основании информации о скорости транспортного средства, полученной от датчика ускорения. Блок 13 распознавания статуса движения определяет направление транспортного средства на основании информации, полученной от датчика скорости рыскания транспортного средства.
[0047] Блок 14 определения положения определяет отношение положений автономно движущегося транспортного средства и целевой точки. Блок 14 определения положения определяет отношение положений автономно движущегося транспортного средства и целевой точки, расположенной на маршруте движения, предусмотренном для автономного вождения. Под маршрутом движения понимают маршрут, по которому транспортное средство движется в режиме автономного вождения. Дополнительная информация о маршруте движения будет приведена ниже.
[0048] Под целевой точкой понимают точку, для которой водитель должен ввести сигнал запуска перед прохождением через целевую точку. Например, целевая точка включает в себя перекресток. Под перекрестком также понимают кольцевой перекресток (круговое движение).
[0049] Целевую точку можно определить отношением между транспортным средством и маршрутом движения для автономного вождения. Целевая точка может не включать в себя перекресток, на котором автономно управляемое транспортное средство движется прямо, но включать перекресток, на котором автономно управляемое транспортное средство поворачивает направо или налево. Целевая точка может включать в себя точку слияния, в которой транспортное средство вливается в главную полосу из полосы разгона. Целевая точка может не включать в себя точку слияния с хорошими условиями видимости, но включать в себя точку слияния с плохими условиями видимости. Точка слияния с плохой видимостью представляет собой точку слияния, в которой диапазон обнаружения для внешнего устройства считывания 2 транспортного средства, движущегося в полосе разгона, ограничен более чем на определенную величину, например, стеной. Аналогичным образом, целевая точка может не включать в себя перекресток с хорошими условиями видимости, но включать перекресток с плохими условиями видимости, когда диапазон обнаружения для внешнего устройства считывания 2 ограничивается более чем на определенную величину зданием или иным подобным сооружением вокруг перекрестка.
[0050] Целевая точка может включать в себя пешеходный переход. Целевая точка может не включать в себя пешеходный переход с хорошими условиями видимости, но включать пешеходный переход с плохими условиями видимости, когда диапазон обнаружения для внешнего устройства считывания 2 ограничивается более чем на определенную величину стеной или иным подобным сооружением в направлении движения транспортного средства.
[0051] Целевая точка может содержать или не содержать сигнал регулирования дорожного движения. Под целевой точкой с сигналом регулирования дорожного движения понимают целевую точку, в которой установлен сигнал регулирования дорожного движения, соответствующий маршруту движения транспортного средства. Даже если в целевой точке имеется сигнал регулирования дорожного движения, но он не соответствует маршруту движения транспортного средства (например, не обращен к транспортному средству на маршруте своего движения), такая целевая точка не является целевой точкой для транспортного средства. Целевая точка может представлять собой перекресток без сигнала регулирования дорожного движения или с сигналом регулирования дорожного движения. Целевая точка может не включать в себя перекресток без сигнала регулирования дорожного движения и включать перекресток с сигналом регулирования дорожного движения. Кроме того, целевая точка может представлять собой пешеходный переход с сигналом регулирования дорожного движения или пешеходный переход без сигнала регулирования дорожного движения. Стоп-линия может быть также установлена в качестве целевой точки.
[0052] Кроме того, целевая точка может включать в себя точку на определенном расстоянии до перекрестка, пешеходного перехода, точки слияния и иных подобных объектов, описанных выше. Целевая точка может включать в себя точку, в которой водитель ранее выполнял операцию завершения автономного вождения (в частности, операцию отмены). Целевая точка может включать в себя точку въезда на участок, на котором ширина полосы движения ограничена вследствие строительства дороги или иных подобных обстоятельств. Кроме того, целевая точка может включать в себя точку дороги со ступенькой или впадиной, на которой водитель транспортного средства испытывает сильную тряску. Целевая точка может включать в себя въезд на платную дорогу. Целевая точка может включать в себя въезд на частную территорию.
[0053] Блок 14 определения положения определяет, не превышает ли расстояние между автономно движущимся транспортным средством и целевой точкой пороговое значение формирования маршрута, основанное на положении транспортного средства на карте, картографической информации и маршруте движения для автономного вождения. Расстояние между автономно движущимся транспортным средством и целевой точкой представляет собой расстояние между транспортным средством и целевой точкой на маршруте движения, предусмотренном для автономного вождения. Пороговое значение формирования маршрута представляет собой предварительно установленное пороговое значение, используемое для запуска формирования траектории остановки (профиль скорости остановки транспортного средства). Дополнительная информация о траектории остановки будет приведена ниже. Пороговое значение формирования маршрута может быть изменено в зависимости от скорости транспортного средства.
[0054] Блок 14 определения положения определяет, приближается ли автономно движущееся транспортное средство к целевой точке. Например, когда транспортное средство достигает предварительно заданного положения запроса сигнала запуска, блок 14 определения положения определяет, что транспортное средство приближается к целевой точке. Положение запроса сигнала запуска может представлять собой положение, в котором расстояние между автономно движущимся транспортным средством и целевой точкой не превышает пороговое значение запроса сигнала запуска. Пороговое значение запроса сигнала запуска представляет собой пороговое значение, предварительно установленное для определения момента запроса сигнала запуска, предназначенного для запроса ввода сигнала запуска от водителя. Пороговое значение запроса сигнала запуска может быть установлено равным другому значению в зависимости от целевой точки. Если траектория остановки формируется с использованием порогового значения формирования маршрута, пороговое значение запроса сигнала запуска будет меньше порогового значения формирования маршрута.
[0055] Необходимость в установлении положения запроса сигнала запуска отсутствует, однако блок 14 определения положения может определить, что транспортное средство приближается к целевой точке, если расстояние между автономно движущимся транспортным средством и целевой точкой становится равно или меньше порогового значения запроса сигнала запуска.
[0056] Кроме того, блок 14 определения положения может определять приближение транспортного средства к целевой точке, используя для этого время до прибытия, а не расстояние. Блок 14 определения положения может определить, что транспортное средство приближается к целевой точке, если время до прибытия транспортного средства в целевую точку становится равно или меньше порогового значения времени запроса сигнала запуска. Пороговое значение времени запроса сигнала запуска соответствует пороговому значению запроса сигнала запуска, описанному выше. Время до прибытия можно рассчитать, например, на основании расстояния между транспортным средством и целевой точкой и профиля скорости транспортного средства (или текущей скорости транспортного средства), входящего в маршрут для автономного вождения.
[0057] Блок 15 формирования маршрута формирует маршрут (траекторию), который будет использоваться для автономного вождения транспортного средства. Блок 15 формирования маршрута формирует маршрут для автономного вождения на основании предварительно установленного пункта назначения, картографической информации в базе 4 картографических данных, положения транспортного средства, обнаруженного блоком 11 распознавания положения транспортного средства, среды вокруг транспортного средства, распознанной блоком 12 распознавания среды вокруг транспортного средства, и статуса движения (скорости транспортного средства, скорость рыскания и т.п.), определенного блоком 13 распознавания статуса движения. Пункт назначения может быть задан пассажиром транспортного средства или автоматически предложен автономной системой 100 вождения или известной навигационной системой.
[0058] Блок 15 формирования маршрута определяет маршрут движения для автономного вождения на основании пункта назначения, картографической информации и положения транспортного средства на карте. Маршрут движения представляет собой маршрут, по которому транспортное средство движется в автономном режиме, и проходит от положения транспортного средства на карте (текущего положения) до пункта назначения. Маршрут движения может быть задан известной навигационной системой. Маршрут путешествия может быть представлен, например, в виде маршрута на основе количества полос. Блок 15 формирования маршрута формирует маршрут для автономного вождения транспортного средства в соответствии с маршрутом движения, составленным по картографическим данным.
[0059] В маршрут входит путь, по которому транспортное средство движется в режиме автономного вождения, и профиль скорости транспортного средства в режиме автономного вождения. Путь представляет собой траекторию, по которой автономно движущееся транспортное средство будет перемещаться на маршруте движения. Путь может определяться, например, значениями изменения угла поворота рулевого колеса (профилем угла поворота рулевого колеса) транспортного средства, соответствующими положению на маршруте движения. Положение на маршруте движения представляет собой, например, продольное положение, заданное с предварительно определенным интервалом (например, 1 м) в направлении движения по маршруту. Профиль угла поворота рулевого колеса содержит данные, описывающие связь целевого угла поворота рулевого колеса с каждым заданным продольным положением.
[0060] Блок 15 формирования маршрута формирует путь, по которому движется транспортное средство, на основании, например, маршрута движения, картографической информации, среды вокруг транспортного средства и статуса движения транспортного средства. Блок 15 формирования маршрута формирует путь таким образом, чтобы транспортное средство двигалось по осевой линии полосы движения, входящей в маршрут движения.
[0061] Вместо профиля угла поворота рулевого колеса можно использовать профиль крутящего момента рулевого управления, описывающий связь целевого крутящего момента рулевого управления с каждым заданным продольным положением. Вместо профиля угла поворота рулевого колеса можно использовать профиль бокового положения, описывающий связь целевого бокового положения с каждым заданным продольным положением. Целевое боковое положение является целевым положением в направлении ширины полосы движения. В этом случае заданное продольное положение и целевое боковое положение могут совместно определять одну координату положения.
[0062] Профиль скорости транспортного средства содержит данные, описывающие, например, связь целевой скорости транспортного средства с каждым заданным продольным положением. Заданное продольное положение может быть установлено на основании времени движения транспортного средства вместо расстояния. Заданное продольное положение может быть установлено равным положению прибытия транспортного средства через одну секунду и положению прибытия транспортного средства через две секунды.
[0063] Блок 15 формирования маршрута формирует профиль скорости транспортного средства на основании информации о скорости, в частности, разрешенной скорости, входящей, например, в информацию о пути и картографическую информацию. Вместо разрешенной скорости можно использовать заданную скорость, устанавливаемую заранее для положения или участка на карте. Блок 15 формирования маршрута формирует маршрут для автономного вождения на основании пути и профиля скорости транспортного средства.
[0064] Блок 15 формирования маршрута формирует маршрут для прохождения через целевую точку, если целевая точка включена в маршрут движения для автономного вождения. Блок 15 формирования маршрута формирует маршрут прохождения на основании, например, положения транспортного средства на карте, картографической информации, среды вокруг транспортного средства и статуса движения транспортного средства. Маршрут прохождения включает путь прохождения и профиль скорости движения транспортного средства. Путь прохождения соответствует пути, по которому транспортное средство проходит через целевую точку на маршруте движения. Профиль скорости движения транспортного средства представляет собой профиль скорости транспортного средства, регламентирующий прохождение транспортного средства через целевую точку со скоростью, соответствующей разрешенной скорости или иному подобному параметру в целевой точке.
[0065] Если блок 14 определения положения находит, что расстояние между автономно движущимся транспортным средством и целевой точкой становится равным или меньшим, чем пороговое значение для формирования маршрута, блок 15 формирования маршрута формирует траекторию остановки, по которой транспортное средство останавливается, не проезжая целевую точку. Блок 15 формирования маршрута формирует траекторию остановки на основании, например, положения транспортного средства на карте, картографической информации, среды вокруг транспортного средства и статуса движения транспортного средства. Блок 15 формирования маршрута формирует траекторию остановки в зависимости от целевой точки.
[0066] Траектория остановки включает в себя путь остановки и профиль скорости остановки транспортного средства, определяющий замедление транспортного средства и его остановку без прохождения через целевую точку. Путь остановки представляет собой путь для остановки транспортного средства без прохождения через целевую точку. Путь остановки может совпадать с путем прохождения. Пути остановки и прохождения совпадают, например, в том случае, когда автономно движущееся транспортное средство движется прямо через перекресток, являющийся целевой точкой. Профиль скорости остановки транспортного средства представляет собой, например, профиль скорости транспортного средства, определяющий постепенное замедление и остановку транспортного средства без прохождения через целевую точку. В профиле скорости остановки транспортного средства положение начала замедления с целью остановки транспортного средства принимается за положение начала торможения.
[0067] Положение остановки транспортного средства на пути остановки, по существу, не регламентируется, если оно не располагается после целевой точки. Положение остановки транспортного средства может находиться перед целевой точкой или в пределах целевой точки (в пределах перекрестка или иного подобного объекта). Положение остановки транспортного средства может совпадать, например, с положением стоп-линии перед целевой точкой. Положение остановки транспортного средства может быть установлено перед целевой точкой на расстоянии, соответствующем заданному расстоянию на маршруте движения. Заданное расстояние представляет собой предварительно заданное расстояние (например, 1 м).
[0068] Если блок 14 определения положения находит, что автономно движущееся транспортное средство приближается к целевой точке, блок 16 запроса сигнала запуска запрашивает у водителя ввод сигнала запуска. Ввод сигнала запуска предназначен для передачи решения водителя о прохождении транспортным средством через целевую точку в автономную систему 100 вождения.
[0069] Блок 16 запроса сигнала запуска направляет водителю запрос на ввод сигнала запуска, передавая управляющий сигнал в HMI 8 и выводя голосовое сообщение из динамика HMI 8. Например, если целевой точкой является перекресток, на котором установлен сигнал регулирования дорожного движения, блок 16 запроса сигнала запуска запрашивает ввод сигнала запуска, выводя голосовое сообщение «Пожалуйста, проверьте сигнал регулирования дорожного движения и выполните ввод сигнала запуска, если прохождение целевой точки разрешено». Блок 16 запроса сигнала запуска может запросить ввод сигнала запуска путем вывода изображения на дисплей или одновременного вывода изображения и речевого сообщения. Вместо вывода изображения на дисплей может загораться или мигать лампа или иной подобный элемент приборной панели.
[0070] Кроме того, блок 16 запроса сигнала запуска выводит водителю различные уведомления в соответствии с результатом распознавания сигнала регулирования дорожного движения, осуществленного блоком 18 распознавания сигнала регулирования дорожного движения, описанным ниже. Блок 16 запроса сигнала запуска повторно запрашивает ввод сигнала запуска в соответствии с результатом распознавания сигнала регулирования дорожного движения. Дополнительная информация о различных уведомлениях и повторном запросе ввода сигнала запуска будет приведена ниже.
[0071] Блок 17 распознавания ввода сигнала запуска обнаруживает ввод сигнала запуска. Если ввод осуществляется водителем вручную посредством блока 8а ввода сигнала запуска, имеющегося в транспортном средстве (например, переключателя кнопочного типа блока 8а ввода запуска), блок 17 распознавания ввода сигнала запуска обнаруживает ввод сигнала запуска.
[0072] Блок 17 распознавания ввода сигнала запуска может быть выполнен с возможностью распознавания сигналов запуска различных типов. То есть ввод сигнала запуска не ограничен одним типом и допускает подготовку двух и более типов ввода сигнала запуска.
[0073] Блок 17 распознавания ввода сигнала запуска способен распознавать ввод сигнала запуска, если он осуществлен путем воздействия водителя на педаль акселератора транспортного средства. В этом случае блок 17 распознавания ввода сигнала запуска распознает ввод сигнала запуска на основании сигнала использования акселератора, поступившего от датчика 5 педали акселератора. Блок 17 распознавания ввода сигнала запуска распознает ввод сигнала запуска, например, в том случае, если будет обнаружено, что ход педали (степень нажатия педали акселератора водителем) равен определенной величине или превышает ее.
[0074] Блок 17 распознавания ввода сигнала запуска способен распознавать ввод сигнала запуска, если он осуществлен путем прикосновения водителя к сенсорному датчику 6 рулевого колеса транспортного средства. В этом случае блок 17 распознавания ввода сигнала запуска распознает ввод сигнала запуска на основании сигнала контакта, поступившего от сенсорного датчика 6 рулевого колеса.
[0075] Блок 17 распознавания ввода сигнала запуска может быть выполнен с возможностью распознавания ввода сигнала запуска, если, например, будет обнаружено, что обе руки водителя находятся в контакте с рулевым колесом после запроса ввода сигнала запуска. Если обе руки водителя соприкасаются с рулевым колесом до запроса на ввод сигнала запуска, блок 17 распознавания ввода сигнала запуска может распознать ввод сигнала запуска, когда водитель снова положит обе руки на рулевое колесо после того, как обе руки были сняты с рулевого колеса после запроса на ввод сигнала запуска. Блок 17 распознавания ввода сигнала запуска может распознавать ввод сигнала запуска в случае касания рулевого колеса одной рукой.
[0076] Блок 17 распознавания ввода сигнала запуска может распознавать ввод сигнала запуска из комбинации нескольких сигналов. Блок 17 распознавания ввода сигнала запуска может распознавать ввод сигнала запуска на основании, например, сигнала работы акселератора, поступившего от датчика 5 педали акселератора, сигнала контакта, поступившего от сенсорного датчика 6 рулевого управления, и видеоизображения водителя с камеры 7 съемки водителя. В частности, блок 17 распознавания ввода сигнала запуска может распознавать ввод сигнала запуска, когда водитель поворачивает свое лицо к передней части транспортного средства, когда обе руки лежат на рулевом колесе, и когда педаль акселератора приводится в действие на величину, равную определенной величине или превышающую ее.
[0077] Блок 17 распознавания ввода сигнала запуска может распознавать ввод сигнала запуска на основании видеоизображения водителя с камеры 7 съемки водителя и распознавания голоса в HMI 8. Блок 17 распознавания ввода сигнала запуска может распознавать ввод сигнала запуска, если будет обнаружено, что голос, соответствующий предварительно определенному вводу сигнала запуска (например, голос для запроса прохождения транспортного средства через целевую точку), выведен после запроса ввода сигнала запуска, когда водитель смотрит прямо вперед.
[0078] Блок 17 распознавания ввода сигнала запуска может распознавать ввод сигнала запуска на основании сигнала контакта, поступившего от сенсорного датчика 6 рулевого управления, видеоизображения водителя с камеры 7 съемки водителя и среды вокруг транспортного средства. В частности, блок 17 распознавания ввода сигнала запуска может распознавать ввод сигнала запуска, если по видеоизображению водителя будет обнаружено, что взгляд водителя направлен на сигнал регулирования дорожного движения перед транспортным средством, а также что обе руки водителя держат руль с силой, равной определенному усилию захвата или превышающей ее.
[0079] Блок 17 распознавания ввода сигнала запуска может распознавать положение водителя при торможении как один из элементов комбинации для распознавания ввода сигнала запуска. Положение при торможении – это состояние, в котором нога водителя находится на педали тормоза. Положение при торможении может распознаваться, например, датчиком педали тормоза транспортного средства. Блок 17 распознавания ввода сигнала запуска может распознавать ввод сигнала запуска, например, когда лицо водителя обращено к передней части транспортного средства, обе руки лежат на рулевом колесе, и распознано положение при торможении.
[0080] Блок 17 распознавания ввода сигнала запуска распознает отмену сигнала запуска, когда водитель приводит в действие блок 8b отмены сигнала запуска (например, когда переключатель рычажного типа блока 8b отмены приводится в действие). Блок 17 распознавания ввода сигнала запуска может быть выполнен с возможностью распознавания отмены сигналов запуска различных типов. Блок 17 распознавания ввода сигнала запуска может распознавать отмену сигнала запуска в том случае, если будет обнаружено, что ход педали тормоза (степень нажатия) равен определенной величине или превышает ее. Блок 17 распознавания ввода сигнала запуска может распознавать отмену сигнала запуска в том случае, когда водитель слегка нажимает кнопку завершения автономного вождения.
[0081] Блок 18 распознавания сигнала регулирования дорожного движения распознает состояние свечения сигнала регулирования дорожного движения, расположенного в целевой точке и соответствующего маршруту движения (полосе движения) транспортного средства на основании результата обнаружения (изображения с камеры), полученного с внешнего устройства считывания 2. Блок 18 распознавания сигнала регулирования дорожного движения может распознавать состояние свечения сигнала регулирования дорожного движения по изображению с камеры, обработанному программой анализа изображений. Блок 18 распознавания сигнала регулирования дорожного движения может распознавать светящуюся часть сигнала регулирования дорожного движения, сравнивая ее с шаблоном, впоследствии может распознавать состояние свечения сигнала регулирования дорожного движения, используя распознавание цветов. Блок 18 распознавания сигнала регулирования дорожного движения может распознавать светящуюся часть сигнала регулирования дорожного движения, сравнивая ее с шаблоном, после чего может распознавать состояние свечения сигнала «стрелка», используя распознавание графики. Блок 18 распознавания сигнала регулирования дорожного движения может ссылаться на картографическую информацию при распознавании положения сигнала регулирования дорожного движения. В частности, блок 18 распознавания сигнала регулирования дорожного движения может распознавать положение вероятной светящейся части (лампы) сигнала регулирования дорожного движения по базе 4 картографических данных, после чего может распознавать состояние свечения сигнала регулирования дорожного движения, используя распознавание цветов. Кроме того, при распознавании положения и/или светящейся части сигнала регулирования дорожного движения блок 18 распознавания сигнала регулирования дорожного движения может использовать информацию об объекте, полученную радиолокационным датчиком.
[0082] Состояние свечения сигнала регулирования дорожного движения подразумевает, по меньшей мере, состояние, разрешающее движение, и состояние, запрещающее движение. Состояние, разрешающее движение, представляет собой состояние свечения, при котором разрешено движение транспортного средства. Состояние, разрешающее движение, соответствует зеленому сигналу в Японии. Состояние, запрещающее движение, представляет собой состояние свечения, при котором запрещено движение транспортного средства. Состояние, запрещающее движение, соответствует, например, красному сигналу в Японии. Состояние свечения сигнала регулирования дорожного движения может также представлять собой переходное состояние, имеющее место во время перехода из состояния разрешения движения в состояние запрещения движения. Переходное состояние соответствует, например, желтому сигналу в Японии. Состояние свечения сигнала регулирования дорожного движения может представлять собой состояние разрешения движения и состояние запрещения движения в определенном направлении, обозначенном сигналом стрелки. Когда транспортное средство находится в полосе движения, соответствующей сигналу стрелки сигнала регулирования дорожного движения, значение состояния работы сигнала регулирования дорожного движения изменяется в соответствии с сигналом стрелки.
[0083] Кроме того, блок 18 распознавания сигнала регулирования дорожного движения распознает переключение состояния работы сигнала регулирования дорожного движения на основании результата обнаружения (видеоизображения с камеры), полученного внешним устройством считывания 2. Блок 18 распознавания сигналов регулирования дорожного движения обнаруживает, что сигнал регулирования дорожного движения переключается из состояния разрешения движения в состояние запрещения движения. Блок 18 распознавания сигнала регулирования дорожного движения может распознавать состояние свечения сигнала регулирования дорожного движения и переключение состояния сигнала регулирования дорожного движения не только по видеоизображению с камеры, но и посредством подключения к серверу по беспроводной сети или иного подобного подключения с получением информации об управлении дорожным движением. Блок 18 распознавания сигнала регулирования дорожного движения может распознавать состояние свечения сигнала регулирования дорожного движения по результату распознавания этого сигнала другим транспортным средством, переданному по каналу связи между транспортными средствами.
[0084] Блок 19 управления транспортным средством осуществляет автономное вождение транспортного средства. Блок 19 управления транспортным средством осуществляет автономное вождение транспортного средства на основании картографической информации в базе 4 картографических данных, положения транспортного средства на карте, обнаруженного блоком 11 распознавания положения транспортного средства, среды вокруг транспортного средства, распознанной блоком 12 распознавания среды вокруг транспортного средства, статуса движения транспортного средства, определенного блоком 13 распознавания статуса движения, и маршрута, сформированного блоком 15 формирования маршрута. Блок 19 управления транспортным средством осуществляет автономное вождение транспортного средства, передавая управляющий сигнал на привод 9.
[0085] Когда блок 16 запроса сигнала запуска запрашивает от водителя ввод сигнала запуска, и блок 17 распознавания ввода сигнала запуска распознает сигнал запуска, поданный водителем, блок 19 управления транспортным средством инициирует движение автономно управляемого транспортного средства через целевую точку. Блок 19 управления транспортным средством инициирует движение транспортного средства через целевую точку посредством автономного вождения по маршруту движения.
[0086] В частности, если от водителя запрошен ввод сигнала запуска, блок 19 управления транспортным средством переключает маршрут автономно управляемого транспортного средства на траекторию остановки. После распознавания ввода сигнала запуска водителем блок 19 управления транспортным средством переключает маршрут автономно движущегося транспортного средства обратно с траектории остановки на маршрут движения и инициирует движение транспортного средства через целевую точку.
[0087] Если сигнал запуска, поданный водителем, будет обнаружен до того, как будет начато замедление транспортного средства на траектории остановки, блок 19 управления транспортным средством инициирует движение транспортного средства через целевую точку без замедления транспортного средства. Под замедлением транспортного средства в данном случае понимают замедление, приводящее к остановке транспортного средства до прохождения через целевую точку. Блок 19 управления транспортным средством может выполнять замедление, необходимое для прохождения через целевую точку (например, замедление для правого/левого поворота на перекрестке).
[0088] Если сигнал запуска, поданный водителем, не был обнаружен блоком 17 распознавания сигнала запуска, несмотря на то, что блок 16 запроса сигнала запуска запросил от водителя ввод сигнала запуска, блок 19 управления транспортным средством замедляет и останавливает автономно управляемое транспортное средство до прохождения через целевую точку.
[0089] Под отсутствием распознавания сигнала запуска может пониматься, например, ситуация, в которой ввод сигнала запуска не будет обнаружен до момента, в который транспортное средство достигает положения начала торможения на траектории остановки. Под отсутствием распознавания сигнала запуска может пониматься, например, ситуация, в которой ввод сигнала запуска не будет обнаружен в период времени, в который транспортное средство преодолевает определенное предварительно заданное расстояние после подачи запроса на ввод сигнала запуска. В альтернативном варианте под отсутствием распознавания сигнала запуска может пониматься, например, ситуация, в которой ввод сигнала запуска не будет обнаружен в течение определенного предварительно заданного периода времени после подачи запроса на ввод сигнала запуска.
[0090] В частности, если от водителя запрошен ввод сигнала запуска, блок 19 управления транспортным средством переключает маршрут автономно управляемого транспортного средства на траекторию остановки. Когда транспортное средство достигает положения начала торможения на траектории остановки в отсутствие распознавания сигнала запуска, блок 19 управления транспортным средством уведомляет водителя о начале замедления транспортного средства (уведомление о начале замедления) и инициирует замедление и остановку транспортного средства до прохождения через целевую точку. Например, блок 19 управления транспортным средством останавливает транспортное средство в положении стоп-линии перед точкой прохождения, до прохождения через целевую точку. Ниже будет описана функция управления транспортным средством в соответствии с поданным сигналом запуска со ссылкой на прилагаемые фигуры.
Базовая функция для целевой точки с установленным сигналом регулирования дорожного движения
[0091] На ФИГ. 2A в плане изображена ситуация, в которой транспортное средство приближается к перекрестку, на котором сигнал регулирования дорожного движения находится в состоянии, разрешающем движение. На ФИГ. 2A для транспортного средства установлен маршрут движения прямо через перекресток. ФИГ. 2A проиллюстрированы автономное управление транспортным средством M, стоп-линия 30, перекресток 40 и сигнал 50 регулирования дорожного движения.
[0092] Стоп-линия 30 представляет собой линию остановки, соответствующую перекрестку 40 на маршруте автономного вождения транспортного средства М. Перекресток 40 представляет собой целевую точку, в которой установлен сигнал регулирования дорожного движения, расположенный на маршруте автономного вождения транспортного средства М.
[0093] Сигнал 50 регулирования дорожного движения установлен на перекрестке 40, и соответствует маршруту движения транспортного средства M. На ФИГ. 2A сигнал 50 регулирования дорожного движения находится в состоянии, разрешающем движение, и система 100 автономного вождения (блок 18 распознавания сигнала регулирования дорожного движения) распознает состояние, разрешающее движение.
[0094] На ФИГ. 2B изображен график, иллюстрирующий профиль скорости транспортного средства при распознавании ввода сигнала запуска. На ФИГ. 2B по вертикальной оси отложена скорость транспортного средства, а по горизонтальной – положение. На ФИГ. 2B показано положение Pa запроса сигнала запуска, положение Pb начала торможения, положение Ps линии остановки, профиль Va скорости движения транспортного средства и профиль Vb скорости остановки транспортного средства. Кроме того, скорость фактического движения транспортного средства М обозначена как V.
[0095] Положение Pa запроса сигнала запуска представляет собой положение, в котором блок 14 определения положения распознает приближение транспортного средства M к перекрестку 40. Положение Pb начала торможения представляет собой положение, в котором транспортное средство M начинает замедляться на траектории остановки с целью остановки до проезда через перекресток 40. Положение Ps линии остановки представляет собой положение на стоп-линии 30 и положение, в котором транспортное средство М останавливается на траектории остановки.
[0096] Профиль Va скорости движения транспортного средства представляет собой профиль скорости транспортного средства, позволяющий автономно движущемуся транспортному средству M проехать через перекресток 40. Например, профиль Va скорости движения транспортного средства представляет собой профиль скорости транспортного средства, обеспечивающий проезд перекрестка 40 без изменения скорости. Профиль Vb скорости остановки транспортного средства представляет собой профиль скорости транспортного средства, обеспечивающий замедление и остановку автономно движущегося транспортного средства M в положении Ps линии остановки перед перекрестком 40. Профиль Va скорости движения транспортного средства и профиль Vb скорости остановки транспортного средства совпадают до тех пор, пока транспортное средство M не достигнет положения Pb начала торможения. На ФИГ. 2A путь прохождения принят совпадающим с путем остановки.
[0097] В ситуации, показанной на ФИГ. 2A и ФИГ. 2B, когда транспортное средство M достигает положения Pa запроса сигнала запуска, блок 14 определения положения автономной системы 100 вождения распознает приближение транспортного средства M к перекрестку 40, а блок 16 запроса сигнала запуска запрашивает от водителя ввод сигнала запуска. После выполнения запроса ввода сигнала запуска блок 19 управления транспортным средством приступает к автономному управлению в соответствии с профилем Vb скорости остановки транспортного средства (траекторией остановки).
[0098] После этого, поскольку поданный водителем сигнал запуска распознается блоком 17 распознавания сигнала запуска до того, как транспортное средство M достигает положения Pb начала торможения, блок 19 управления транспортным средством переключает управление обратно на профиль Va скорости движения транспортного средства (маршрут движения). Блок 19 управления транспортным средством ведет транспортное средство M через целевую точку в соответствии с профилем Va скорости движения транспортного средства. Скорость V транспортного средства M совпадает с профилем Va скорости движения транспортного средства.
[0099] На ФИГ. 3A в плане изображена ситуация, в которой транспортное средство приближается к перекрестку, на котором сигнал регулирования дорожного движения находится в состоянии, запрещающем движение. На ФИГ. 3A сигнал 50 регулирования дорожного движения находится в состоянии, запрещающем движение, и автономная система 100 вождения распознает состояние, запрещающее движение. На ФИГ. 3B изображен график, иллюстрирующий профиль скорости транспортного средства при отсутствии распознавания ввода сигнала запуска. В дальнейшем одинаковые ссылочные обозначения относятся к одинаковым элементам конфигурации, и их описание не будет приводиться повторно.
[0100] В ситуации, показанной на ФИГ. 3A и ФИГ. 3B, автономная система 100 вождения не распознает ввод сигнала запуска после запроса ввода сигнала запуска от водителя. В этом случае блок 19 управления транспортным средством инициирует автономное управление транспортным средством М в соответствии с профилем Vb скорости остановки транспортного средства (траекторией остановки). Когда транспортное средство M достигает положения Pb начала торможения, блок 19 управления транспортным средством начинает замедление транспортного средства M в соответствии с профилем Vb скорости остановки транспортного средства. После этого блок 19 управления транспортным средством останавливает замедлившееся транспортное средство M в положении Ps линии остановки в соответствии с профилем Vb скорости остановки транспортного средства. Скорость V транспортного средства M в этом случае соответствует профилю Vb скорости остановки транспортного средства.
Функция отмены сигнала запуска
[0101] Даже если ввод сигнала запуска водителем будет распознан, блок 19 управления транспортным средством отменяет сигнал запуска, если блок 17 распознавания сигнала запуска распознает отмену сигнала запуска водителем.
[0102] В частности, при обнаружении отмены сигнала запуска блок 19 управления транспортным средством определяет возможность своевременной остановки транспортного средства на основании положения транспортного средства на карте, положения остановки транспортного средства на траектории остановки и статуса движения транспортного средства. Своевременная остановка транспортного средства означает, что транспортное средство может остановиться в положении запланированной остановки на траектории остановки с замедлением, не превышающим допустимое замедление. Допустимое замедление представляет собой предварительно заданное замедление. Допустимое замедление может быть установлено в качестве верхнего предела замедления, соответствующего неестественному внезапному торможению, например, с точки зрения потока транспорта. Блок 19 управления транспортным средством определяет возможность своевременной остановки транспортного средства, если транспортное средство не достигает положения начала торможения на траектории остановки.
[0103] Если определена возможность своевременной остановки транспортного средства, блок 19 управления транспортным средством отменяет ввод сигнала запуска. После этого, если ввод сигнала запуска не будет обнаружен, блок 19 управления транспортным средством замедляет транспортное средство на траектории остановки и останавливает его до проезда через целевую точку.
[0104] Даже если транспортное средство движется по маршруту движения и проезжает далее положения начала торможения после того, как будет обнаружен ввод сигнала запуска, при обнаружении отмены сигнала запуска и определении возможности своевременной остановки транспортного средства блок 19 управления транспортным средством переключает маршрут с маршрута движения на траекторию остановки. Блок 19 управления транспортным средством переключает скорость транспортного средства с профиля Va скорости движения транспортного средства на профиль Vb скорости остановки транспортного средства, в результате чего скорость V транспортного средства плавно изменяется.
[0105] Если будет определена невозможность своевременной остановки транспортного средства, блок 19 управления транспортным средством уведомляет водителя о невозможности отмены сигнала запуска. Блок 19 управления транспортным средством уведомляет о невозможности отмены сигнала запуска путем передачи управляющего сигнала в HMI 8 и вывода голосового сообщения и/или изображения. Вместо вывода изображения на дисплей может загораться или мигать лампа или иной подобный элемент приборной панели. В этом случае блок 19 управления транспортным средством может замедлять или ускорять транспортное средство M в соответствии со средой вокруг транспортного средства.
[0106] На ФИГ. 4A представлена схема, иллюстрирующая ситуацию, в которой транспортное средство приближается к перекрестку, на котором сигнал регулирования дорожного движения находится в состоянии, разрешающем движение. На ФИГ. 4A сигнал 50 регулирования дорожного движения находится в состоянии, разрешающем движение, и автономная система 100 вождения распознает состояние, разрешающее движение. На ФИГ. 4B изображен график, иллюстрирующий профиль скорости транспортного средства при распознавании отмены сигнала запуска после ввода сигнала запуска.
[0107] Согласно ФИГ. 4A и ФИГ. 4B, автономная система 100 вождения распознает ввод сигнала запуска после запроса ввода сигнала запуска от водителя, однако затем распознает отмену сигнала запуска. В этом случае, поскольку отмена сигнала запуска обнаруживается до того, как транспортное средство M достигнет положения Pb начала торможения, блок 19 управления транспортным средством определяет возможность своевременной остановки транспортного средства M.
[0108] Блок 19 управления транспортным средством переключает маршрут с маршрута движения на траекторию остановки и инициирует замедление транспортного средства M в соответствии с профилем Vb скорости остановки транспортного средства и остановку в положении Ps линии остановки. В этом случае скорость V транспортного средства M соответствует профилю Vb скорости остановки транспортного средства. Отмена сигнала запуска может быть также выполнена для повторного запроса ввода сигнала запуска (ввод сигнала запуска после повторного запроса), который будет описан ниже.
Функция возврата по вводу сигнала запуска после начала замедления
[0109] Даже если замедление транспортного средства на траектории остановки будет начато при обнаружении ввода сигнала запуска, блок 19 управления транспортным средством прекращает замедление на траектории остановки и инициирует движение транспортного средства через целевую точку. То есть блок 19 управления транспортным средством переключается с траектории остановки на маршрут движения. Блок 19 управления транспортным средством переключается обратно с маршрута движения на траекторию остановки, то есть скорость транспортного средства изменяется плавно.
[0110] На ФИГ. 5A представлена схема, иллюстрирующая ситуацию, в которой транспортное средство приближается к перекрестку, на котором сигнал регулирования дорожного движения находится в состоянии, разрешающем движение. На ФИГ. 5A сигнал 50 регулирования дорожного движения находится в состоянии, разрешающем движение, и автономная система 100 вождения распознает состояние, разрешающее движение. На ФИГ. 5B изображен график, иллюстрирующий профиль скорости транспортного средства при распознавании ввода сигнала запуска после начала замедления транспортного средства.
[0111] В ситуации, показанной на ФИГ. 5A и ФИГ. 5B, автономная система 100 вождения не распознает ввод сигнала запуска до тех пор, пока транспортное средство M не достигнет положения Pb начала торможения, и замедление транспортного средства M начинается по траектории остановки. В этом случае блок 19 управления транспортным средством осуществляет автономное вождение таким образом, чтобы скорость соответствовала профилю Va скорости движения транспортного средства, а не профилю Vb скорости остановки транспортного средства. Блок 19 управления транспортным средством управляет транспортным средством M таким образом, чтобы скорость V транспортного средства плавно изменялась от профиля Vb скорости остановки транспортного средства к профилю Va скорости движения транспортного средства.
Функция повторного запроса, если распознанное состояние сигнала регулирования дорожного движения не соответствует состоянию разрешения движения
[0112] Даже если поданный водителем сигнал запуска будет обнаружен, когда блок 18 распознавания сигнала регулирования дорожного движения распознает, что сигнал регулирования дорожного движения не разрешает движение, блок 16 запроса сигнала запуска уведомляет водителя о том, что сигнал регулирования дорожного движения распознан как не соответствующий состоянию разрешения движения, и повторно запрашивает ввод сигнала запуска.
[0113] Если сигнал регулирования дорожного движения будет распознан как соответствующий состоянию запрещения движения, а не состоянию разрешения движения, то в качестве уведомления о том, что распознанный сигнал регулирования дорожного движения не разрешает движение, блок 16 запроса сигнала запуска передает уведомление о том, что распознанный сигнал регулирования дорожного движения запрещает движение. Если сигнал регулирования дорожного движения будет распознан как соответствующий переходному состоянию, а не состоянию разрешения движения, то в качестве уведомления о том, что распознанный сигнал регулирования дорожного движения не разрешает движение, блок 16 запроса сигнала запуска передает уведомление о том, что распознанный сигнал регулирования дорожного движения находится в переходном состоянии.
[0114] Блок 16 запроса сигнала запуска направляет водителю уведомление и повторный запрос, передавая управляющий сигнал в HMI 8 и выводя голосовое сообщение из динамика HMI 8. Например, блок 16 запроса сигнала запуска уведомляет водителя о том, что распознанный сигнал регулирования дорожного движения распознается не разрешает движение, путем вывода голосового сообщения: «распознан красный сигнал (движение запрещено)». Кроме того, блок 16 запроса сигнала запуска повторно запрашивает от водителя ввод сигнала запуска, например, выводя голосовое сообщение «Пожалуйста, проверьте сигнал регулирования дорожного движения и повторно выполните ввод сигнала запуска, если вы хотите, чтобы транспортное средство пришло в движение».
[0115] Кроме того, при повторном запросе ввода сигнала запуска блок 16 запроса сигнала запуска запрашивает от водителя управляющее действие, отличающееся от ввода сигнала запуска перед повторным запросом. Блок 16 запроса сигнала запуска запрашивает от водителя управляющее действие, отличающееся от ввода сигнала запуска перед повторным запросом и представляющее собой одну из следующих операций: использование блока 8а ввода сигнала запуска, нажатие педали акселератора, прикосновение к сенсорному датчику 6 рулевого управления и другие операции, в частности, сочетания вышеописанных операций. Если тип операции, запрошенной от водителя, выполняется при повторном запросе от блока 16 запроса сигнала запуска, блок 17 распознавания ввода сигнала запуска распознает ввод сигнала запуска.
[0116] Блок 16 запроса сигнала запуска может запросить вход сигнала запуска в рамках повторного запуска, при котором намерение водителя подать сигнал запуска очевидно по сравнению с вводом сигнала запуска перед повторным запросом. Если сигнал запуска перед повторным запросом подан посредством нажатия педали акселератора на величину, превышающую определенное значение, блок 16 запроса сигнала запуска может запросить ввод сигнала запуска посредством ручного управления рычажным переключателем блока 8а ввода в рамках повторного запроса сигнала запуска. Блок 16 запроса сигнала запуска запрашивает у водителя ввод сигнала запуска посредством операции, отличающейся от ввода сигнала запуска, перед повторным запросом, выводя голосовое сообщение «Пожалуйста, выполните повторный ввод сигнала запуска с помощью рычажного переключателя блока ввода».
[0117] Например, если ввод сигнала запуска перед повторным запросом осуществлен одной операцией, блок 16 запроса сигнала запуска может запросить от водителя ввод сигнала запуска путем выполнения нескольких операций в рамках повторного запроса, при котором очевидно намерение водителя подать сигнал запуска.
[0118] Кроме того, например, если ввод сигнала запуска перед повторным запросом осуществлен прикосновением обеих рук водителя к сенсорному датчику 6 рулевого управления в рамках запроса, блок 16 запроса сигнала запуска может запросить от водителя подачу сигнала запуска путем нажатия педали акселератора на величину, равную или превышающую определенное значение, в состоянии, в котором обе руки водителя находятся в контакте с сенсорным датчиком 6 рулевого управления. Таким образом, блок 16 запроса сигнала запуска может более достоверно распознавать решение водителя, запрашивая выполнение операции, более очевидно свидетельствующей о намерении водителя подать сигнал запуска в рамках повторного запроса.
[0119] Блок 16 запроса сигнала запуска может направить уведомление или повторно запросить ввод сигнала запуска путем вывода изображения на дисплей или одновременного вывода изображения и звукового сигнала. Вместо вывода изображения на дисплей может загораться или мигать лампа или иной подобный элемент приборной панели. Кроме того, блок 16 запроса сигнала запуска может повторно запрашивать ввод сигнала запуска, используя вибрацию рулевого колеса и / или сиденья водителя.
[0120] Даже если обнаружен сигнал запуска, поданный водителем, при обнаружении блоком 18 распознавания сигнала регулирования дорожного движения, запрещающего движение, блок 19 управления транспортным средством направляет транспортное средство по траектории остановки. Если сигнал запуска будет обнаружен после того, как блок 16 запроса сигнала запуска выполнит повторный запрос сигнала запуска, блок 19 управления транспортным средством переключает маршрут с траектории остановки на маршрут движения и инициирует движение транспортного средства через целевую точку.
[0121] На ФИГ. 6A представлена схема, иллюстрирующая ситуацию, в которой транспортное средство приближается к перекрестку, на котором сигнал регулирования дорожного движения находится в состоянии, запрещающем движение. На ФИГ. 6A сигнал 50 регулирования дорожного движения находится в состоянии, запрещающем движение, и автономная система 100 вождения распознает состояние, запрещающее движение. На ФИГ. 6B изображен график, иллюстрирующий профиль скорости транспортного средства, когда повторный запрос ввода сигнала запуска выполняется после ввода сигнала запуска.
[0122] В ситуации, показанной на ФИГ. 6A и ФИГ. 6B, автономная система 100 вождения обнаруживает сигнал запуска, поданный водителем, но поскольку сигнал 50 регулирования дорожного движения, распознанный блоком 18 распознавания сигнала регулирования дорожного движения, запрещает движение, водителю будет направлено уведомление о том, что сигнал 50 регулирования дорожного движения не соответствует состоянию разрешения движения (уведомление о распознавании запрета движения) и повторный запрос ввода сигнала запуска. Водитель получает уведомление о распознавании состояния запрета движения и подтверждает, что сигнал 50 регулирования дорожного движения находится в состоянии, запрещающем движение, после чего инициирует остановку транспортного средства M. Поскольку сигнал запуска, поданный водителем, не обнаруживается после повторного запроса сигнала запуска, блок 19 управления транспортным средством инициирует замедление транспортного средства M в соответствии с профилем Vb скорости остановки транспортного средства и остановку в положении Ps линии остановки.
[0123] На ФИГ. 7A представлена схема, иллюстрирующая ситуацию, в которой транспортное средство приближается к перекрестку, на котором сигнал регулирования дорожного движения находится в состоянии, разрешающем движение. На ФИГ. 7A сигнал 50 регулирования дорожного движения разрешает движение, однако автономная система 100 вождения ошибочно распознает запрещающее состояние сигнала 50 регулирования дорожного движения под влиянием фоновой подсветки или иного подобного явления. На ФИГ. 7B изображен график, иллюстрирующий профиль скорости транспортного средства при распознавании ввода сигнала запуска после выполнения повторного запроса ввода сигнала запуска.
[0124] В ситуации, показанной на ФИГ. 7A и ФИГ. 7B, автономная система 100 вождения обнаруживает сигнал запуска, поданный водителем, но поскольку сигнал 50 регулирования дорожного движения ошибочно распознан блоком 18 распознавания сигнала регулирования дорожного движения как запрещающий движение, водителю будет направлено уведомление о распознавании запрета движения и повторный запрос ввода сигнала запуска. В этом случае водитель получает уведомление о распознавании запрета движения и проверяет сигнал 50 регулирования дорожного движения, обнаруживая, что сигнал 50 регулирования дорожного движения разрешает движение, и автономная система 100 вождения выполнила распознавание неправильно. Водитель повторно вводит сигнал запуска в соответствии с повторным запросом, чтобы инициировать пересечение транспортным средством М перекрестка 40. Поскольку обнаружен повторный ввод сигнала запуска водителем, блок 19 управления транспортным средством инициирует движение транспортного средства M через перекресток 40 в соответствии с профилем Va скорости движения транспортного средства.
[0125] Даже если первый ввод сигнала запуска не был обнаружен ранее и оказался распознан после того, как транспортное средство M достигло положения Pb начала торможения и началось замедление транспортного средства M, после распознавания сигнала 50 регулирования дорожного движения, запрещающего движение, блок 19 управления транспортным средством направляет уведомление о распознавании запрета движения и повторный запрос ввода сигнала запуска.
[0126] Кроме того, если повторный ввод сигнала запуска не обнаружен после повторного запроса транспортного средства, транспортное средство M достигает положения Pb начала торможения и начинает замедляться, после чего, если был обнаружен повторный ввод сигнала запуска, блок 19 управления транспортным средством может выполнить обработку, аналогичную вышеописанной «функции возврата по вводу сигнала запуска после начала замедления».
Функция повторного запроса, если распознанное состояние сигнала регулирования дорожного движения соответствует переключению в состояние, отличающееся от состояния разрешения движения
[0127] Даже если будет обнаружен поданный водителем сигнал запуска, и блок 18 распознавания сигнала регулирования дорожного движения распознает, что сигнал регулирования дорожного движения переключен в состояние, отличающееся от состояния, разрешающего движение, блок 16 запроса сигнала запуска уведомляет водителя о том, что распознанный сигнал регулирования дорожного движения переключен в состояние, отличающееся от состояния, разрешающего движение, и повторно запрашивает ввод сигнала запуска.
[0128] Переключение сигнала регулирования дорожного движения в состояние, отличающееся от состояния разрешения движения, подразумевает переключение сигнала в переходное состояние или состояние запрещения движения. Переключение сигнала регулирования дорожного движения в состояние, отличающееся от состояния разрешения движения, не подразумевает переключение сигнала из состояния запрещения движения в состояние разрешения движения. В дальнейшем уведомление о распознавании переключения сигнала регулирования дорожного движения в состояние, отличающееся от состояния разрешения движения, называют уведомлением о переключении сигнала регулирования дорожного движения.
[0129] В частности, если обнаружен поданный водителем сигнал запуска, и блок 18 распознавания сигнала регулирования дорожного движения распознает, что сигнал регулирования дорожного движения переключен в состояние, отличающееся от состояния разрешения движения, блок 16 запроса сигнала запуска определяет возможность своевременной остановки транспортного средства. Определение возможности своевременной остановки транспортного средства может быть выполнено аналогично функции отмены сигнала запуска, описанной выше. Если будет определена невозможность своевременной остановки транспортного средства, от блока 16 запроса сигнала запуска не требуется выполнять какую-либо конкретную обработку. Если будет определена возможность своевременной остановки транспортного средства, блок 16 запроса сигнала запуска направляет водителю уведомление о переключении сигнала регулирования дорожного движения и повторный запрос ввода сигнала запуска.
[0130] Блок 16 запроса сигнала запуска направляет водителю уведомление о переключении сигнала регулирования дорожного движения и повторный запрос, передавая управляющий сигнал в HMI 8 и выводя голосовое сообщение из динамика HMI 8. Блок 16 запроса сигнала запуска направляет водителю уведомление о переключении сигнала регулирования дорожного движения, выводя речевое сообщение, например, «сигнал регулирования дорожного движения изменяется на красный сигнал (запрет движения)».
[0131] Кроме того, блок 16 запроса сигнала запуска повторно запрашивает от водителя ввод сигнала запуска, например, выводя голосовое сообщение «Пожалуйста, проверьте сигнал регулирования дорожного движения и повторно выполните ввод сигнала запуска, если вы хотите, чтобы транспортное средство пришло в движение». Повторный запрос ввода сигнала запуска может выполняться аналогично «функции повторного запроса, если распознанное состояние сигнала регулирования дорожного движения соответствует состоянию запрета движения».
[0132] Повторный ввод запрошенного сигнала запуска, когда распознанный сигнал регулирования дорожного движения находится в состоянии, запрещающем движение, и повторный ввод запрошенного сигнала запуска, когда будет распознано переключение сигнала регулирования дорожного движения, могут относиться к разным типам. В этом случае, если тип операции, запрошенной от водителя, выполняется при повторном запросе от блока 16 запроса сигнала запуска, блок 17 распознавания ввода сигнала запуска распознает ввод сигнала запуска.
[0133] Даже если обнаружен сигнал запуска, поданный водителем, при обнаружении блоком 18 распознавания сигнала регулирования дорожного движения, переключающегося в состояние, отличающееся от состояния, разрешающего движение, блок 19 управления транспортным средством направляет транспортное средство по траектории остановки. Если сигнал запуска не будет обнаружен после того, как блок 16 запроса сигнала запуска выполнит повторный запрос сигнала запуска, блок 19 управления транспортным средством инициирует замедление транспортного средства на траектории остановки и остановку без проезда через целевую точку.
[0134] Если сигнал запуска будет обнаружен до того, как транспортное средство достигнет положения начала замедления с целью своевременной остановки после выполнения повторного запроса сигнала запуска, блок 19 управления транспортным средством переключает маршрут с траектории остановки на маршрут движения и инициирует движение транспортного средства через целевую точку. Положение начала замедления представляет собой положение, в котором транспортному средству необходимо замедлиться для того, чтобы остановиться в положении остановки на траектории остановки.
[0135] На ФИГ. 8A представлена схема, иллюстрирующая ситуацию, в которой сигнал регулирования дорожного движения переключается в состояние, отличающееся от состояния разрешения движения, когда транспортное средство приближается к перекрестку. На ФИГ. 8A сигнал 50 регулирования дорожного движения находится в состоянии разрешения движения, но переключается из состояния разрешения в переходное состояние при приближении транспортного средства M. Кроме того, автономная система 100 вождения распознает переключение сигнала регулирования дорожного движения. На ФИГ. 8B изображен график, иллюстрирующий профиль скорости транспортного средства при распознавании ввода сигнала запуска после выполнения повторного запроса ввода сигнала запуска на основании переключения сигнала регулирования дорожного движения.
[0136] В ситуации, показанной на ФИГ. 8A и ФИГ. 8B, в автономной системе 100 вождения, поскольку блок 18 распознавания сигнала регулирования дорожного движения обнаруживает переключение сигнала 50 регулирования дорожного движения в переходное состояние после сигнала запуска, поданного водителем, водителю направляется уведомление о переключении сигнала регулирования дорожного движения и повторный запрос ввода сигнала запуска. Водитель принимает уведомление о переключении сигнала регулирования дорожного движения и подтверждает, что сигнал 50 регулирования дорожного движения перешел в переходное состояние. На ФИГ. 8B водитель определяет, что транспортное средство M может пересечь перекресток 40 до того, как сигнал 50 регулирования дорожного движения перейдет в состояние, запрещающее движение, и, таким образом, повторно подает сигналы запуска.
[0137] Поскольку обнаружен повторный ввод сигнала запуска водителем, блок 19 управления транспортным средством инициирует движение транспортного средства M через перекресток 40 в соответствии с профилем Va скорости движения транспортного средства. В этом случае, поскольку транспортное средство M пересекает перекресток 40 до того, как сигнал 50 регулирования дорожного движения переключится в состояние, запрещающее движение, блок 19 управления транспортным средством может увеличить скорость транспортного средства M в пределах предварительно установленного диапазона скорости транспортного средства.
[0138] Если замедление транспортного средства M начинается до того, как транспортное средство M достигает положения Pb начала торможения без повторного ввода сигнала запуска, блок 19 управления транспортным средством может выполнять обработку аналогично вышеописанной «функции возврата по вводу сигнала запуска после начала замедления».
[0139] Кроме того, если повторный ввод сигнала запуска выполняется после того, как будет распознано переключение сигнала 50 регулирования дорожного движения из состояния, разрешающего движение, в переходное состояние и после этого, даже если переключение сигнала 50 регулирования дорожного движения из переходного состояния в состояние, запрещающее движение, будет распознано до того, как транспортное средство М пересечет перекресток 40, блок 16 запроса сигнала запуска может повторно не направлять уведомление о переключении сигнала регулирования дорожного движения и повторный запрос ввода сигнала запуска. В этом случае после повторного ввода сигнала запуска, даже если будет распознано переключение сигнала 50 регулирования дорожного движения из переходного состояния в состояние, запрещающее движение, и повторный ввод сигнала запуска не будет выполнен, блок 19 управления транспортным средством может инициировать пересечение перекрестка 40 транспортным средством М.
Функция второго запроса, если распознанное состояние сигнала регулирования дорожного движения соответствует переключению в состояние, разрешающее движение
[0140] Если блок 18 распознавания сигнала регулирования дорожного движения обнаружит, что сигнал регулирования дорожного движения переключился в состояние, разрешающее движение, а сигнал запуска, поданный водителем, после выполнения запроса сигнала запуска не будет распознан, блок 16 запроса сигнала запуска уведомляет водителя о распознавании переключения сигнала регулирования дорожного движения в состояние, разрешающее движение, и направляет второй запрос ввода сигнала запуска.
[0141] Запрос ввода сигнала запуска, выполняемый в состоянии, в котором ввод сигнала запуска не распознан после запроса ввода сигнала запуска, называют вторым запросом ввода сигнала запуска. Блок 16 запроса сигнала запуска передает управляющий сигнал, например, в HMI 8, уведомляет водителя о распознавании переключения сигнала регулирования дорожного движения в состояние, разрешающее движение, выводом голосового сообщения из динамика HMI 8, и выполняет второй запрос ввода сигнала запуска. Блок 16 запроса сигнала запуска может направить уведомление и второй запрос ввода сигнала запуска путем вывода изображения на дисплей.
[0142] На ФИГ. 9A представлена схема, иллюстрирующая ситуацию, в которой сигнал регулирования дорожного движения переключается в состояние, разрешающее движение, когда транспортное средство приближается к перекрестку. На ФИГ. 9A сигнал 50 регулирования дорожного движения находится в состоянии, запрещающем движение, но переключается из состояния запрещения движения в состояние разрешения движения при приближении транспортного средства M к перекрестку. Кроме того, автономная система 100 вождения распознает переключение сигнала регулирования дорожного движения. На ФИГ. 9B изображен график, иллюстрирующий профиль скорости транспортного средства, когда первый ввод сигнала запуска распознается после уведомления о переключении сигнала регулирования дорожного движения в состояние, разрешающее движение, после начала замедления транспортного средства, осуществленного в отсутствие распознанного ввода сигнала запуска.
[0143] В ситуации использования автономной системы 100 вождения, показанной на ФИГ. 9A и 9B, транспортное средство M достигает положения Pb начала торможения и начинает замедляться, пока не распознается ввод сигнала запуска. После этого, поскольку блок 18 распознавания сигнала регулирования дорожного движения обнаруживает переключение сигнала 50 регулирования дорожного движения в состояние, разрешающее движение, а ввод сигнала запуска не распознается, блок 16 запроса сигнала запуска направляет уведомление о переключении сигнала регулирования дорожного движения (в этом случае – уведомление о переключении сигнала 50 регулирования дорожного движения в состояние, разрешающее движение) и второй запрос ввода сигнала запуска.
[0144] Водитель не подает сигнал запуска, потому что, например, сигнал регулирования дорожного движения распознается как находящийся в состоянии, запрещающем движение, однако после получения уведомления о переключении сигнала регулирования дорожного движения в состояние, разрешающее движение, водитель подтверждает что сигнал 50 регулирования дорожного движения переключился в состояние, разрешающее движение, и подает сигнал запуска. Блок 19 управления транспортным средством распознает сигнал запуска, поданный водителем, переключает маршрут с траектории остановки на маршрут движения и инициирует пересечение перекрестка 40 транспортным средством М.
Базовая функция для целевой точки без установленного сигнала регулирования дорожного движения
[0145] На ФИГ. 10A представлена схема, иллюстрирующая ситуацию, в которой транспортное средство намеревается повернуть вправо на перекрестке, на котором отсутствует сигнал регулирования дорожного движения. На ФИГ. 10A показан перекресток (целевая точка) 60, на котором отсутствует сигнал регулирования дорожного движения, пешеходный переход 70, расположенный в зоне правого поворота транспортного средства M на перекрестке 60, здание 80, расположенное между транспортным средством M и пешеходным переходом 70 до поворота направо на перекрестке 60. Стоп-линия на перекрестке 60 отсутствует. На ФИГ. 10B изображен график, иллюстрирующий профиль скорости транспортного средства при распознавании ввода сигнала запуска.
[0146] В ситуации использования автономной системы 100 вождения, показанной на ФИГ. 10A и ФИГ. 10B, диапазон обнаружения для внешнего устройства считывания 2 ограничена зданием 80 на этапе до въезда транспортного средства М на перекресток 60, вследствие чего невозможно распознать ситуацию в зоне правого поворота на перекрестке 60 (в частности, наличие или отсутствие пешеходов на пешеходном переходе 70). В этой ситуации блок 15 формирования маршрута формирует профиль Vc скорости остановки транспортного средства, согласно которому транспортное средство M останавливается на перекрестке 60. Положение Pt ожидания в профиле Vc скорости остановки транспортного средства не регламентируется. Положение Pt ожидания может представлять собой положение, в котором водитель способен визуально распознать ситуацию в зоне правого поворота. В этом примере блок 15 формирования маршрута не формирует профиль скорости движения транспортного средства, но может формировать профиль скорости движения транспортного средства, в соответствии с которым транспортное средство проезжает перекресток 60 на малой скорости.
[0147] Для выполнения правого поворота транспортным средством M блок 19 управления транспортным средством инициирует замедление транспортного средства M, проехавшего положение Pb начала торможения, в соответствии с профилем Vc скорости остановки транспортного средства. Блок 14 определения положения определяет приближение транспортного средства M к перекрестку 60, на основании, например, расстояния между транспортным средством M и перекрестком 60. Если блок 14 определения положения обнаруживает, что транспортное средство M приближается к перекрестку 60 (транспортное средство M достигает положения Pa запроса сигнала запуска), блок 16 запроса сигнала запуска запрашивает от водителя ввод сигнала запуска.
[0148] Блок 16 запроса сигнала запуска запрашивает ввод сигнала запуска, например, передавая управляющий сигнал в HMI 8 и выводя голосовое сообщение «Пожалуйста, проверьте направление движения (или направление правого поворота) транспортного средства на перекрестке, и если движение разрешено, выполните ввод сигнала запуска». Водитель осматривает направление движения на перекрестке в соответствии с запросом ввода сигнала запуска, подтверждает отсутствие пешеходов на пешеходном переходе 70 и т.п., после чего подает сигнал запуска. В случае распознавания сигнала запуска, поданного водителем, блок 19 управления транспортным средством увеличивает скорость транспортного средства и инициирует пересечение перекрестка 60 транспортным средством M. Блок 19 управления транспортным средством инициирует пересечение перекрестка 60 транспортным средством М со скоростью, соответствующей правому повороту на перекрестке с соблюдением правил дорожного движения.
[0149] На ФИГ. 11A представлена схема, иллюстрирующая ситуацию, в которой транспортное средство намеревается повернуть вправо на перекрестке, на котором отсутствует сигнал регулирования дорожного движения. На ФИГ. 11A показана ситуация, аналогичная ФИГ. 10A. На ФИГ. 11B изображен график, иллюстрирующий профиль скорости транспортного средства при отсутствии распознавания ввода сигнала запуска.
[0150] В ситуации автономной системы 100 вождения, показанной на ФИГ. 11A и ФИГ. 11B, для правого поворота транспортного средства M скорость транспортного средства M, проехавшего положение Pb начала торможения, снижается в соответствии с профилем Vc скорости остановки транспортного средства. Блок 16 запроса сигнала запуска запрашивает от водителя подачу сигнала запуска, когда транспортное средство M достигает положения Pa запроса сигнала запуска. Поскольку сигнал запуска, поданный водителем, не обнаружен, блок 19 управления транспортным средством останавливает транспортное средство M в положении Pt ожидания в соответствии с профилем Vc скорости остановки транспортного средства.
[0151] Если перекресток, на котором нет сигнала регулирования дорожного движения, является целевой точкой, блок 15 формирования маршрута не обязательно должен устанавливать положение Pt ожидания в пределах перекрестка. Блок 15 формирования маршрута может установить положение Pt ожидания перед перекрестком. Блок 15 формирования маршрута может индивидуально устанавливать положение Pt ожидания в соответствии с маршрутом движения. Блок 15 формирования маршрута может индивидуально устанавливать положение Pt ожидания в соответствии с маршрутом движения таким образом, чтобы направление движения транспортного средства M (поворот направо, поворот налево, прямо вперед или иное направление) на перекрестке, на котором отсутствует сигнал регулирования дорожного движения, становилось видно водителю. Если перед перекрестком имеется стоп-линия в ситуации, показанной на ФИГ. 10A, блок 15 формирования маршрута может инициировать остановку транспортного средства M на стоп-линии.
Способ управления автономной системой вождения
[0152] Ниже будет описан способ управления автономной системой 100 вождения со ссылкой на прилагаемые фигуры.
Обработка формирования траектории остановки
[0153] На ФИГ. 12 изображена блок-схема, иллюстрирующая обработку траектории остановки. Обработка по блок-схеме, показанной на ФИГ. 12, выполняется, когда транспортное средство находится в режиме автономного вождения.
[0154] Как показано на ФИГ. 12, на этапе S10 ЭБУ 10 автономной системы 100 вождения определяет, не превышает ли расстояние между автономно движущимся транспортным средством и целевой точкой пороговое значение формирования маршрута, используя блок 14 определения положения. Блок 14 определения положения определяет, превышает ли расстояние между транспортным средством и целевой точкой пороговое значение формирования маршрута, основанное на положении транспортного средства на карте, картографической информации и маршруте движения для автономного вождения. Если будет определено, что расстояние между автономно движущимся транспортным средством и целевой точкой не превышает пороговое значение формирования маршрута (исход «ДА» на этапе S10), ЭБУ 10 инициирует переход процесса к этапу S12. Если не будет определено, что расстояние между автономно движущимся транспортным средством и целевой точкой не превышает пороговое значение формирования маршрута (исход «НЕТ» на этапе S10), ЭБУ 10 завершает текущую обработку. После этого ЭБУ 10 повторяет обработку с этапа S10 по истечении определенного времени.
[0155] На этапе S12 ЭБУ 10 формирует траекторию остановки с помощью блока 15 формирования маршрута. В траекторию остановки входит путь остановки и профиль скорости остановки транспортного средства. Блок 15 формирования маршрута формирует траекторию остановки на основании, например, маршрута движения, картографической информации, среды вокруг транспортного средства и статуса движения транспортного средства. Блок 15 формирования маршрута формирует профиль скорости остановки транспортного средства, в частности, на основании информации о разрешенной скорости (или любой заданной скорости), входящей, например, в информацию о пути и картографическую информацию. Блок 15 формирования маршрута формирует траекторию остановки в зависимости от целевой точки.
[0156] При использовании пути, аналогичного ранее сформированному маршруту движения, в качестве траектории остановки, блок 15 формирования маршрута может сформировать только профиль скорости остановки транспортного средства. Когда траектория остановки будет сформирована, ЭБУ 10 завершает обработку формирования траектории остановки для текущей целевой точки.
Обработка обнаружения ввода сигнала запуска для целевой точки, в которой имеется сигнал регулирования дорожного движения
[0157] На ФИГ. 13 изображена блок-схема, иллюстрирующая обработку обнаружения ввода сигнала запуска для целевой точки, в которой имеется сигнал регулирования дорожного движения. Обработка по блок-схеме, показанной на ФИГ. 13, выполняется, когда формируется траектория остановки для целевой точки, в которой имеется сигнал регулирования дорожного движения, и транспортное средство находится в режиме автономного вождения.
[0158] Как показано на ФИГ. 13, на этапе S20 ЭБУ 10 определяет, приближается ли автономно движущееся транспортное средство к целевой точке, в которой имеется сигнал регулирования дорожного движения, при помощи блока 14 определения положения. Блок 14 определения положения определяет, приближается ли автономно движущееся транспортное средство к целевой точке, в которой имеется сигнал регулирования дорожного движения, на основании положения транспортного средства на карте, картографической информации и маршруте движения для автономного вождения.
[0159] Если будет определено, что автономно движущееся транспортное средство приближается к целевой точке, в которой имеется сигнал регулирования дорожного движения (исход «ДА» на этапе S20), ЭБУ 10 инициирует переход процесса к этапу S22. Если не будет определено, что автономно движущееся транспортное средство приближается к целевой точке, в которой имеется сигнал регулирования дорожного движения (исход «НЕТ» на этапе S20), ЭБУ 10 завершает текущую обработку. После этого ЭБУ 10 повторяет обработку с этапа S20 по истечении определенного времени.
[0160] На этапе S22 ЭБУ 10 запрашивает от водителя ввод сигнала запуска посредством блока 16 запроса сигнала запуска (этап запроса сигнала запуска). Блок 16 запроса сигнала запуска направляет водителю запрос на ввод сигнала запуска, передавая управляющий сигнал в HMI 8 и выводя голосовое сообщение из динамика HMI 8. После этого ЭБУ 10 инициирует переход процесса к этапу S24.
[0161] На этапе S24 ЭБУ 10 определяет, распознан ли ввод сигнала запуска, с помощью блока 17 распознавания ввода сигнала запуска (этап распознавания ввода сигнала запуска). Блок 17 распознавания ввода сигнала запуска обнаруживает, по меньшей мере, одну из следующих операций ввода сигнала запуска: использование блока 8а ввода сигнала запуска водителем, нажатие педали акселератора, касание сенсорного датчика 6 рулевого управления и т.п. Если будет распознан ввод сигнала запуска (исход «ДА» на этапе S24), ЭБУ 10 инициирует переход процесса к этапу S28. Если ввод сигнала запуска не будет распознан (исход «НЕТ» на этапе S24), ЭБУ 10 инициирует переход процесса к этапу S26.
[0162] На этапе S26 ЭБУ 10 определяет, достигло ли транспортное средство положения начала торможения, при помощи блока 19 управления транспортным средством. Блок 19 управления транспортным средством определяет, достигло ли транспортное средство положения начала торможения, на основании траектории остановки (профиля скорости остановки транспортного средства) и положения транспортного средства на карте. Если будет определено, что транспортное средство достигло положения начала торможения (исход «ДА» на этапе S26), ЭБУ 10 инициирует переход процесса к этапу S38. Если достижение транспортным средством положения начала торможения не будет определено (исход «НЕТ» на этапе S26), ЭБУ 10 возвращает процесс к этапу S24 и повторяет распознавание ввода сигнала запуска.
[0163] На этапе S28 ЭБУ 10 определяет, находится ли сигнал регулирования дорожного движения, установленный в целевой точке, в состоянии, разрешающем движение (этап распознавания сигнала регулирования дорожного движения), при помощи блока 18 распознавания сигнала регулирования дорожного движения. Блок 18 распознавания сигнала регулирования дорожного движения определяет, находится ли сигнал регулирования дорожного движения в состоянии, разрешающем движение, на основании информации, полученной от внешнего устройства считывания 2. Если будет определено, что сигнал регулирования дорожного движения находится в состоянии, разрешающем движение (исход «ДА» на этапе S28), ЭБУ 10 инициирует переход процесса к этапу S34. Если не будет определено, что сигнал регулирования дорожного движения находится в состоянии, разрешающем движение (исход «НЕТ» на этапе S28), ЭБУ 10 инициирует переход процесса к этапу S30.
[0164] На этапе S30 ЭБУ 10 направляет водителю уведомление о том, что распознанный сигнал 50 регулирования дорожного движения не находится в состоянии, разрешающем движение, и повторный запрос ввода сигнала запуска с помощью блока 16 запроса сигнала запуска (этап первого повторного запроса). Блок 16 запроса сигнала запуска направляет водителю уведомление и повторные запросы, например, передавая управляющий сигнал в HMI 8 и выводя голосовое сообщение из динамика HMI 8. Блок 16 запроса сигнала запуска запрашивает от водителя ввод сигнала запуска, отличающийся от ввода сигнала запуска перед повторным запросом. После этого ЭБУ 10 инициирует переход процесса к этапу S32.
[0165] На этапе S32 ЭБУ 10 определяет, распознан ли повторный ввод сигнала запуска, с помощью блока 17 распознавания ввода сигнала запуска (этап распознавания ввода сигнала запуска). Если тип операции, запрошенной от водителя, выполняется при повторном запросе от блока 16 запроса сигнала запуска, блок 17 распознавания ввода сигнала запуска распознает ввод сигнала запуска. Если будет распознан ввод сигнала запуска (исход «ДА» на этапе S32), ЭБУ 10 инициирует переход процесса к этапу S34. Если ввод сигнала запуска не будет распознан (исход «НЕТ» на этапе S32), ЭБУ 10 инициирует переход процесса к этапу S36.
[0166] На этапе 34 ЭБУ 10 осуществляет путь движения при помощи блока 19 управления транспортным средством (этап управления транспортным средством). Блок 19 управления транспортным средством инициирует движение транспортного средства через целевую точку по маршруту движения, передавая управляющий сигнал на привод 9. Если сигнал запуска будет обнаружен до того, как будет начато замедление транспортного средства на траектории остановки, блок 19 управления транспортным средством инициирует движение транспортного средства через целевую точку по маршруту движения без замедления транспортного средства на траектории остановки.
[0167] На этапе S36 ЭБУ 10 определяет, достигло ли транспортное средство положения начала торможения, при помощи блока 19 управления транспортным средством. Если будет определено, что транспортное средство достигло положения начала торможения (исход «ДА» на этапе S36), ЭБУ 10 инициирует переход процесса к этапу S38. Если достижение транспортным средством положения начала торможения не будет определено (исход «НЕТ» на этапе S36), ЭБУ 10 возвращает процесс к этапу S32 и повторяет распознавание ввода сигнала запуска.
[0168] На этапе S38 ЭБУ 10 уведомляет водителя о начале замедления с помощью блока 19 управления транспортным средством. Блок 19 управления транспортным средством уведомляет водителя о начале замедления путем, передавая управляющий сигнал в HMI 8 и выводя голосовое сообщение из динамика HMI 8. После этого ЭБУ 10 инициирует переход процесса к этапу S40.
[0169] На этапе S40 ЭБУ 10 осуществляет траекторию остановки при помощи блока 19 управления транспортным средством (этап управления транспортным средством). Блок 19 управления транспортным средством инициирует замедление транспортного средства на траектории остановки, передавая управляющий сигнал на привод 9. Если после этого ввод сигнала запуска не будет обнаружен, блок 19 управления транспортным средством инициирует остановку транспортного средства до проезда через целевую точку.
[0170] Выше была описана обработка распознавания ввода сигнала запуска для целевой точки, в которой имеется сигнал регулирования дорожного движения, однако во время обработки на этапе S26 может оказаться неизвестным, достигло ли транспортное средство положения начала торможения, однако может быть определено, истек ли первый предварительно заданный период времени, по данным запроса ввода сигнала запуска. Аналогичным образом, процесс на этапе S36 позволяет определить, истек ли второй предварительно заданный период времени по данным повторного запроса ввода сигнала запуска. Первое заданное время и второе заданное время могут представлять собой периоды, длительность которых достаточна для того, чтобы водитель мог проверить сигнал регулирования дорожного движения и определить необходимость ввода сигнала запуска. Кроме того, первое заданное время и второе заданное время, соответственно, могут быть выбраны таким образом, чтобы они не превышали оставшееся время до достижения транспортным средством положения начала торможения.
[0171] Кроме того, обработка по блок-схеме, показанной на ФИГ. 13, заканчивается, когда завершается автономное вождение, даже во время обработки. Этот момент совпадает с моментом для этапов обработки согласно ФИГ. 14 - ФИГ. 17.
Дополнительная обработка после ввода сигнала запуска
[0172] На ФИГ. 14 изображена блок-схема, иллюстрирующая дополнительную обработку после ввода сигнала запуска. Обработка по блок-схеме, показанной на ФИГ. 14, выполняется, например, если ввод сигнала запуска обнаружен на этапе S24 согласно ФИГ. 13. Обработка по блок-схеме, показанной на ФИГ. 14, может быть выполнена, например, если ввод сигнала запуска будет обнаружен на этапе S94 согласно ФИГ. 17 (см. ниже). Обработка по блок-схеме, показанной на ФИГ. 14, завершается, если транспортное средство остановлено на траектории остановки или проезжает через целевую точку даже во время обработки.
[0173] Как показано на ФИГ. 14, на этапе S50 ЭБУ 10 определяет, распознана ли отмена сигнала запуска, с помощью блока 17 распознавания ввода сигнала запуска (этап распознавания отмены сигнала запуска). Например, если водитель приводит в действие блок 8b отмены сигнала запуска, блок 17 распознавания ввода сигнала запуска распознает отмену сигнала запуска. Если будет распознана отмена сигнала запуска (исход «ДА» на этапе S50), ЭБУ 10 инициирует переход процесса к этапу S52. Если отмена сигнала запуска не будет распознана (исход «НЕТ» на этапе S50), ЭБУ 10 завершает текущую обработку. После этого ЭБУ 10 повторяет обработку с этапа S50 по истечении определенного времени.
[0174] На этапе S52 ЭБУ 10 определяет возможность своевременной остановки транспортного средства с помощью блока 19 управления транспортным средством. Блок 19 управления транспортным средством определяет возможность своевременной остановки транспортного средства на основании положения остановки транспортного средства на карте, положения остановки транспортного средства на траектории остановки и статуса движения транспортного средства. Если будет определено, что транспортное средство может своевременно остановиться (исход «ДА» на этапе S52), ЭБУ 10 инициирует переход процесса к этапу S54. Если будет определено, что транспортное средство не может своевременно остановиться (исход «НЕТ» на этапе S52), ЭБУ 10 инициирует переход процесса к этапу S56.
[0175] На этапе S54 ЭБУ 10 обрабатывает отмену сигнала запуска с помощью блока 19 управления транспортным средством. Если транспортное средство не достигает положения начала торможения, блок 19 управления транспортным средством отменяет ввод сигнала запуска и возвращается к процессу на этапе S24 согласно ФИГ. 13. Если транспортное средство уже проехало положение начала торможения и приближается к целевой точке на маршруте движения, блок 19 управления транспортным средством отменяет ввод сигнала запуска и переключает маршрут с маршрута движения на траекторию остановки.
[0176] На этапе S56 ЭБУ 10 уведомляет водителя о том, что отмена сигнала запуска с помощью блока 19 управления транспортным средством невозможна. Блок 19 управления транспортным средством уведомляет о невозможности отмены сигнала запуска путем передачи управляющего сигнала в HMI 8 и вывода голосового сообщения и/или изображения.
Дополнительная обработка при использовании маршрута движения
[0177] На ФИГ. 15 изображена блок-схема, иллюстрирующая дополнительную обработку при использовании маршрута движения. Обработка по блок-схеме, показанной на ФИГ. 15, выполняется в том случае, когда маршрут движения используется на этапе S34 согласно ФИГ. 14, этапе S96 согласно ФИГ. 17 (см. ниже) или переключается с траектории остановки. Обработка по блок-схеме, показанной на ФИГ. 15, завершается, если транспортное средство проезжает через целевую точку даже во время обработки.
[0178] Как показано на ФИГ. 15, на этапе S60 ЭБУ 10 определяет, распознает ли блок 18 распознавания сигнала регулирования дорожного движения переключение сигнала регулирования дорожного движения в состояние, отличающееся от состояния, разрешающего движение (этап распознавания сигнала регулирования дорожного движения). Блок 18 распознавания сигнала регулирования дорожного движения определяет, переключен ли сигнал регулирования дорожного движения в состояние, отличающееся от состояния, разрешающего движение, например, на основании информации, полученной от внешнего устройства считывания 2. Если будет определено переключение сигнала регулирования дорожного движения в состояние, отличающееся от состояния, разрешающего движение (исход «ДА» на этапе S60), ЭБУ 10 инициирует переход процесса к этапу S62. Если переключение сигнала регулирования дорожного движения в состояние, отличающееся от состояния, разрешающего движение, не будет определено (исход «НЕТ» на этапе S60), ЭБУ 10 инициирует переход процесса к этапу S60. После этого ЭБУ 10 повторяет обработку с этапа S60.
[0179] На этапе S62 ЭБУ 10 определяет возможность своевременной остановки транспортного средства с помощью блока 19 управления транспортным средством. Если будет определено, что транспортное средство может своевременно остановиться (исход «ДА» на этапе S62), ЭБУ 10 инициирует переход процесса к этапу S64. Если будет определено, что транспортное средство не может своевременно остановиться (исход «НЕТ» на этапе S62), ЭБУ 10 завершает обработку движения при использовании маршрута движения.
[0180] На этапе S64 ЭБУ 10 уведомляет водителя о распознавании переключения сигнала регулирования дорожного движения в состояние, отличающееся от состояния, разрешающего движение, и повторно запрашивает ввод сигнала запуска с помощью блока 16 запроса сигнала запуска (этап второго повторного запроса). Блок 16 запроса сигнала запуска направляет водителю уведомление о переключении сигнала регулирования дорожного движения и повторный запрос, передавая управляющий сигнал в HMI 8 и выводя голосовое сообщение из динамика HMI 8. Блок 16 запроса сигнала запуска запрашивает от водителя ввод сигнала запуска, отличающийся от ввода сигнала запуска перед повторным запросом. После этого ЭБУ 10 инициирует переход процесса к этапу S66.
[0181] На этапе S66 ЭБУ 10 определяет, распознан ли ввод сигнала запуска блоком 17 распознавания ввода сигнала запуска (этап распознавания ввода сигнала запуска). Если тип операции, запрошенной от водителя, выполняется при повторном запросе от блока 16 запроса сигнала запуска, блок 17 распознавания ввода сигнала запуска распознает ввод сигнала запуска. Если будет распознан ввод сигнала запуска (исход «ДА» на этапе S66), ЭБУ 10 завершает процесс движения при использовании маршрута движения. Если ввод сигнала запуска не будет распознан (исход «НЕТ» на этапе S66), ЭБУ 10 инициирует переход процесса к этапу S68.
[0182] На этапе S68 ЭБУ 10 определяет, достигло ли транспортное средство положения начала замедления, при помощи блока 19 управления транспортным средством. Блок 19 управления транспортным средством определяет достигло ли транспортное средство положения начала замедления, на основании положения остановки на траектории остановки, положения транспортного средства на карте и статуса движения транспортного средства. Если будет определено, что транспортное средство достигло положения начала замедления (исход «ДА» на этапе S68), ЭБУ 10 инициирует переход процесса к этапу S70. Если не будет определено, что транспортное средство достигло положения начала замедления (исход «НЕТ» на этапе S68), ЭБУ 10 возвращает процесс к этапу S66. и повторяет распознавание ввода сигнала запуска.
[0183] На этапе S70 ЭБУ 10 уведомляет водителя о начале замедления с помощью блока 19 управления транспортным средством. Блок 19 управления транспортным средством уведомляет водителя о начале замедления путем, передавая управляющий сигнал в HMI 8 и выводя голосовое сообщение из динамика HMI 8. После этого ЭБУ 10 инициирует переход процесса к этапу S72.
[0184] На этапе S72 ЭБУ 10 переключает маршрут с маршрута движения на траекторию остановки при помощи блока 19 управления транспортным средством (этап управления транспортным средством). Блок 19 управления транспортным средством замедляет транспортное средство, переключая маршрут с маршрута движения на траекторию остановки, и останавливает его до проезда через целевую точку.
Дополнительная обработка при использовании траектории остановки
[0185] На ФИГ. 16 изображена блок-схема, иллюстрирующая дополнительную обработку после выполнения остановки по заданной траектории. Обработка по блок-схеме, показанной на ФИГ. 16, выполняется в том случае, когда траектория остановки используется на этапе S40 согласно ФИГ. 13, этапе S98 согласно ФИГ. 17 (см. ниже) или переключается с маршрута движения. Обработка по блок-схеме, показанной на ФИГ. 16, завершается при остановке транспортного средства даже во время обработки.
[0186] Как показано на ФИГ. 16, на этапе S80 ЭБУ 10 определяет, распознает ли блок 18 распознавания сигнала регулирования дорожного движения переключение сигнала регулирования дорожного движения в состояние, разрешающее движение (этап распознавания сигнала регулирования дорожного движения). Если будет определено переключение сигнала регулирования дорожного движения в состояние, разрешающее движение (исход «ДА» на этапе S80), ЭБУ 10 инициирует переход процесса к этапу S82. Если будет определено, что сигнал регулирования дорожного движения не соответствует состоянию, разрешающему движение (исход «НЕТ» на этапе S80), ЭБУ 10 инициирует переход процесса к этапу S84.
[0187] На этапе S82 ЭБУ 10 уведомляет водителя о переключении сигнала регулирования дорожного движения в состояние, разрешающее движение, и выполняет второй запрос ввода сигнала запуска с помощью блока 16 запроса сигнала запуска (этап второго повторного запроса ввода сигнала запуска). После этого ЭБУ 10 инициирует переход процесса к этапу S84.
[0188] На этапе S84 ЭБУ 10 определяет, распознан ли ввод сигнала запуска блоком 17 распознавания ввода сигнала запуска (этап распознавания ввода сигнала запуска). Если будет распознан ввод сигнала запуска (исход «ДА» на этапе S84), ЭБУ 10 инициирует переход процесса к этапу S86. Если ввод сигнала запуска не будет распознан (исход «НЕТ» на этапе S84), ЭБУ 10 завершает текущую обработку. После этого ЭБУ 10 повторяет обработку с этапа S80.
[0189] На этапе S86 ЭБУ 10 переключает маршрут с траектории остановки на маршрут движения при помощи блока 19 управления транспортным средством (этап управления транспортным средством). Блок 19 управления транспортным средством инициирует движение транспортного средства через целевую точку, переключая маршрут с траектории остановки на маршрут движения.
Обработка обнаружения ввода сигнала запуска для целевой точки, в которой отсутствует сигнал регулирования дорожного движения
[0190] На ФИГ. 17 изображена блок-схема, иллюстрирующая обработку обнаружения ввода сигнала запуска для целевой точки, в которой отсутствует сигнал регулирования дорожного движения. Обработка по блок-схеме, показанной на ФИГ. 17, выполняется, когда формируется траектория остановки для целевой точки, в которой отсутствует сигнал регулирования дорожного движения, и транспортное средство находится в режиме автономного вождения.
[0191] Как показано на ФИГ. 17, на этапе S90 ЭБУ 10 определяет, приближается ли автономно движущееся транспортное средство к целевой точке, в которой отсутствует сигнал регулирования дорожного движения, при помощи блока 14 определения положения. Блок 14 определения положения определяет, приближается ли автономно движущееся транспортное средство к целевой точке, в которой отсутствует сигнал регулирования дорожного движения, на основании положения транспортного средства на карте, картографической информации и маршруте движения для автономного вождения.
[0192] Если будет определено, что автономно движущееся транспортное средство приближается к целевой точке, в которой отсутствует сигнал регулирования дорожного движения (исход «ДА» на этапе S90), ЭБУ 10 инициирует переход процесса к этапу S92. Если не будет определено, что автономно движущееся транспортное средство приближается к целевой точке, в которой отсутствует сигнал регулирования дорожного движения (исход «НЕТ» на этапе S90), ЭБУ 10 завершает текущую обработку. После этого ЭБУ 10 повторяет обработку с этапа S90 по истечении определенного времени.
[0193] На этапе S92 ЭБУ 10 запрашивает от водителя ввод сигнала запуска посредством блока 16 запроса сигнала запуска (этап запроса сигнала запуска). Блок 16 запроса сигнала запуска направляет водителю запрос на ввод сигнала запуска, передавая управляющий сигнал в HMI 8 и выводя голосовое сообщение из динамика HMI 8. После этого ЭБУ 10 инициирует переход процесса к этапу S94.
[0194] На этапе S94 ЭБУ 10 определяет, распознан ли ввод сигнала запуска, с помощью блока 17 распознавания ввода сигнала запуска (этап распознавания ввода сигнала запуска). Если будет распознан ввод сигнала запуска (исход «ДА» на этапе S94), ЭБУ 10 инициирует переход процесса к этапу S98. Если ввод сигнала запуска не будет распознан (исход «НЕТ» на этапе S94), ЭБУ 10 инициирует переход процесса к этапу S96.
[0195] На этапе S96 ЭБУ 10 осуществляет маршрут движения при помощи блока 19 управления транспортным средством (этап управления транспортным средством). Блок 19 управления транспортным средством инициирует движение транспортного средства через целевую точку по маршруту движения.
[0196] На этапе S98 ЭБУ 10 осуществляет маршрут движения при помощи блока 19 управления транспортным средством (этап управления транспортным средством). Блок 19 управления транспортным средством замедляет транспортное средство на траектории остановки и останавливает его в целевой точке до проезда через целевую точку. Блок 19 управления транспортным средством может уведомлять водителя о начале замедления до начала замедления транспортного средства на траектории остановки.
Эффективность автономной системы вождения и способа управления такой системой
[0197] В соответствии с автономной системой 100 вождения и способом управления такой системой согласно раскрытому выше аспекту настоящего изобретения, когда автономно управляемое транспортное средство приближается к целевой точке, в частности, перекрестку, и от водителя потребуется подать сигнал запуска, инициирующий прохождение транспортного средства через целевую точку, транспортное средство проедет через целевую точку, если будет распознан ввод сигнала запуска, или замедлится и остановится в целевой точке до проезда через нее, если ввод сигнала запуска не будет обнаружен. Следовательно, автономная система 100 вождения и способ управления такой системой позволяет инициировать прохождение транспортного средства через целевую точку после того, как будет получено решение водителя о прохождении через целевую точку или остановке.
[0198] Автономная система 100 вождения и способ управления такой системой предусматривают выполнение запроса на ввод сигнала запуска до того, как начнется замедление транспортного средства, и если ввод сигнала запуска будет распознан до начала замедления транспортного средства, транспортное средство проедет через целевую точку, не замедляясь до остановки. Следовательно, автономная система 100 вождения и способ управления такой системой позволяют водителю выполнить ввод сигнала запуска раньше в соответствии с запросом ввода сигнала запуска по сравнению со случаем, в котором транспортное средство всегда замедляется при приближении к целевой точке, и, тем самым, обеспечить проезд транспортного средства через целевую точку без замедления до остановки.
[0199] Согласно автономной системе 100 вождения и способу управления такой системой, даже если замедление транспортного средства начато для остановки транспортного средства до проезда через целевую точку, когда ввод сигнала запуска не был обнаружен, возможность прекращения замедления транспортного средства и проезда через целевую точку при распознавании ввода сигнала запуска позволяет обеспечить проезд транспортного средства через целевую точку по решению водителя, даже если ввод сигнала запуска водителем произойдет с задержкой.
[0200] Согласно автономной системе 100 вождения и способу управления такой системой, даже если водитель выполняет ввод сигнала запуска, когда блок распознавания сигнала регулирования дорожного движения обнаруживает, что сигнал регулирования дорожного движения не находится в состоянии, разрешающем движение, повторный запрос ввода сигнала запуска с уведомлением водителя о том, что сигнал регулирования дорожного движения не находится в состоянии, разрешающем движение, позволяет предотвратить принятие водителем ошибочного решения в ситуации, когда блок распознавания сигнала регулирования дорожного движения обнаруживает, что сигнал регулирования дорожного движения не находится в состоянии, разрешающем движение.
[0201] Согласно автономной системе 100 вождения и способу управления такой системой, даже если водитель выполняет ввод сигнала запуска, когда распознается переключение сигнала регулирования дорожного движения в состояние, отличающееся от состояния разрешения движения, водителю направляется уведомление об обнаружении переключения сигнала регулирования дорожного движения в состояние, отличающееся от состояния разрешения движения, и повторный запрос на ввод сигнала запуска, благодаря чему водитель может получить информацию о переключении сигнала регулирования дорожного движения в состояние, отличающееся от состояния разрешения движения, после ввода сигнала запуска и, тем самым, принять решение, соответствующее ситуации.
[0202] Согласно автономной приводной системе 100 и способу управления такой системой, повторный запрос ввода сигнала запуска, согласно которому водителю нужно выполнить ввод, отличающийся от осуществленного перед повторным запросом, позволяет предотвратить простой запуск привода сигналом запуска без анализа ситуации, в которой запрашивается ввод сигнала запуска.
[0203] Предпочтительные варианты осуществления настоящего изобретения описаны выше, однако они не носят ограничительного характера. Помимо вышеописанных вариантов осуществления, настоящее изобретение может быть реализовано в различных формах, включая различные модификации и улучшения, основанные на знаниях специалистов в данной области техники.
[0204] Блок 17 распознавания ввода сигнала запуска может распознавать ввод сигнала запуска до запроса ввода сигнала запуска. Существует вероятность того, что водитель запомнит целевую точку на маршруте ежедневного движения и сможет выполнить ввод сигнала запуска, распознавая состояние свечения или иное подобное состояние сигнала регулирования дорожного движения в целевой точке раньше момента, в который транспортное средство достигнет положения запроса сигнала запуска. Если расстояние между автономно движущимся транспортным средством и целевой точкой не превышает пороговое значение распознавания сигнала запуска, блок 17 распознавания ввода сигнала запуска обнаруживает ввод сигнала запуска перед запросом ввода сигнала запуска в качестве сигнала запуска, инициирующего движение транспортного средства через целевую точку перед транспортным средством. Пороговое значение распознавания сигнала запуска представляет собой предварительно установленное пороговое значение. Распознавание можно выполнять по времени прибытия в целевую точку вместо расстояния. В этом случае блок 17 распознавания ввода сигнала запуска уведомляет водителя о распознавании сигнала запуска для инициации движения транспортного средства через целевую точку путем передачи управляющего сигнала в HMI 8 и вывода голосового сообщения и/или изображения. Вместо вывода изображения на дисплей может загораться или мигать лампа или иной подобный элемент приборной панели.
[0205] Блок 14 определения положения может изменять положение запроса сигнала запуска в зависимости от состояния водителя. Модуль 14 определения положения может определять, концентрирует ли водитель свое внимание на вождении, на основании, например, информации с сенсорного датчика 6 рулевого управления и видеоизображения водителя с камеры 7 съемки водителя. В качестве примера случаев, в которых водитель не концентрируется на вождении, являются случаи, в которых водитель напряжен, не держит рулевое колесо и иные подобные случаи. В качестве примера случаев, в которых водитель концентрируется на вождении, можно назвать случай, когда водитель удерживает рулевое колесо и смотрит вперед перед транспортным средством, или иные подобные случаи. Если будет определено, что водитель не концентрируется на вождении, блок 14 определения положения может установить положение запроса ввода сигнала запуск дальше от целевой точки по сравнению со случаем, в котором будет определено, что водитель концентрируется на вождении. Если будет определено, что водитель концентрируется на вождении, блок 16 запроса сигнала запуска может отменить запрос сигнала запуска.
[0206] Блок 17 распознавания ввода сигнала запуска не обязательно должен распознавать несколько типов ввода сигнала запуска. Блок 17 распознавания ввода сигнала запуска может распознавать в качестве сигнала запуска, по меньшей мере, один из следующих типов ввода: ручное использование водителем блока 8а ввода сигнала запуска, находящегося в транспортном средстве, нажатие педали акселератора или касание сенсорного датчика 6 рулевого управления. Сенсорный датчик транспортного средства не ограничивается сенсорным датчиком 6 рулевого управления, но может представлять собой сенсорный датчик, предусмотренный на приборной панели транспортного средства, в подлокотнике транспортного средства или внутри двери транспортного средства. Кроме того, для определения усилия рук водителя на рулевом колесе можно использовать датчик захвата, встроенный в рулевое колесо и определяющий усилие давления водителя на рулевое колесо. Если сигнал датчика захвата покажет, что усилие хвата обеих рук водителя равно или превышает определенное пороговое значение, блок 17 распознавания ввода сигнала запуска может распознать сигнал запуска.
[0207] При повторном запросе ввода сигнала запуска блок 16 запроса сигнала запуска может запрашивать от водителя ввод сигнала запуска, совпадающий с вводом сигнала запуска перед повторным запросом. Блок 16 запроса сигнала запуска запрашивает от водителя ввод сигнала запуска, совпадающий с вводом сигнала запуска перед повторным запросом и превышающий по объему ввод сигнала запуска, осуществленный перед повторным запросом. Если переключатель кнопочного типа блока 8а ввода используется для ввода сигнала запуска перед повторным запросом, блок 16 запроса сигнала запуска может запросить у водителя выполнение глубокого или длительного нажатия кнопки по сравнению с нажатием до повторного запроса (при использовании для ввода сигнала запуска после повторного запроса). Если переключатель рычажного типа блока 8а ввода используется для ввода сигнала запуска перед повторным запросом, блок 16 запроса сигнала запуска может запросить у водителя выполнение глубокого опускания рычага по сравнению с операцией до повторного запроса (при использовании для ввода сигнала запуска после повторного запроса). Если педаль акселератора используется для ввода сигнала запуска перед повторным запросом, блок 16 запроса сигнала запуска может запросить у водителя выполнения глубокого или длительного нажатия педали акселератора по сравнению с нажатием до повторного запроса (при использовании для ввода сигнала запуска после повторного запроса).
[0208] Блок 15 формирования маршрута не обязательно должен приступать к формированию траектории остановки на основании расстояния между автономно движущимся транспортным средством и целевой точкой. Вместо расстояния можно использовать время до прибытия. Блок 15 формирования маршрута может сформировать траекторию остановки в момент времени, в который возможна обработка формирования, независимо от расстояния между автономно движущимся транспортным средством и целевой точкой. Блок 15 формирования маршрута может одновременно формировать маршрут движения и траекторию остановки. Блок 19 управления транспортным средством может переключать маршрут с маршрута движения на траекторию остановки, когда транспортное средство достигает положения начала торможения в отсутствие распознавания ввода сигнала запуска, а не во время направления водителю запроса ввода сигнала запуска.
[0209] Автономная система 100 вождения не обязательно должна иметь функцию отмены сигнала запуска. Если сигнал запуска подан ошибочно, автономная система 100 вождения может быть выполнена с возможностью прекращения автономного вождения водителем, активирующего блок ввода команды на завершение автономного вождения.
[0210] Автономная приводная система 100 не обязательно должна иметь функцию возврата по вводу сигнала запуска после начала замедления. Если транспортное средство достигает положения начала торможения в отсутствие распознавания ввода сигнала запуска, автономная система 100 вождения может иметь конфигурацию, в которой транспортное средство временно останавливается до проезда через целевую точку.
[0211] Автономная система 100 вождения не обязательно должна распознавать состояние свечения сигнала регулирования дорожного движения. Автономная система 100 вождения может иметь конфигурацию, в которой транспортное средство проезжает через целевую точку или останавливается до проезда через целевую точку в зависимости от сигнала запуска, поданного водителем, без распознавания состояния работы сигнала регулирования дорожного движения. В этом случае автономная система 100 вождения не обязательно должна содержать блок 18 распознавания сигнала регулирования дорожного движения.
[0212] Автономная система 100 вождения не обязательно должна иметь функцию повторного запроса, если будет обнаружено, что сигнал регулирования дорожного движения не находится в состоянии, разрешающем движение. Блок 16 запроса сигнала запуска может иметь конфигурацию, в которой водителю направляется только уведомление о том, что распознанный сигнал регулирования дорожного движения не соответствует состоянию, разрешающему движение, без повторного запроса ввода сигнала запуска. В этом случае блок 19 управления транспортным средством инициирует движение транспортного средства через целевую точку по маршруту движения, если водитель не отменяет сигнал запуска (или не выполняет операцию завершения автономного вождения).
[0213] Кроме того, в функции повторного запроса, описанной выше, автономная приводная система 100 может выполнять только повторный запрос сигнала запуска без уведомления о том, что распознанный сигнал регулирования дорожного движения не находится в состоянии, разрешающем движение. Кроме того, блок 16 запроса сигнала запуска может быть выполнен с возможностью направления уведомления и повторного запроса сигнала запуска только в том случае, если распознанный сигнал регулирования дорожного движения будет находиться в состоянии, запрещающем движение, и направления уведомления и повторного ввода сигнала запуска в том случае, если распознанный сигнал регулирования дорожного движения будет находиться в переходном состоянии.
[0214] Автономная система 100 вождения не обязательно должна иметь функцию повторного запроса, если будет обнаружено переключение сигнала регулирования дорожного движения в состояние, отличающееся от состояния, разрешающего движение. Блок 16 запроса сигнала запуска может быть выполнен с возможностью направления водителю только уведомления о переключении сигнала регулирования дорожного движения, если будет распознано переключение сигнала регулирования дорожного движения в состояние, отличающееся от состояния, разрешающего движение.
[0215] Кроме того, в функции повторного запроса, описанной выше, блок 16 запроса сигнала запуска может выполнять только повторный запрос сигнала запуска без уведомления о переключении сигнала регулирования дорожного движения. В функции повторного запроса, описанной выше, блок 16 запроса сигнала запуска может быть выполнен с возможностью уведомления о переключении сигнала регулирования дорожного движения и повторного запроса сигнала запуска только после того, как будет распознано переключение сигнала регулирования дорожного движения в состояние, запрещающее движение, и отсутствия уведомления о переключении сигнала регулирования дорожного движения и повторного запроса сигнала запуска, даже если будет распознано переключение сигнала регулирования дорожного движения из состояния, разрешающего движение, в переходное состояние.
[0216] Автономная система 100 вождения не обязательно должна иметь функцию второго запроса, если будет обнаружено переключение сигнала регулирования дорожного движения в состояние, отличающееся от состояния, разрешающего движение. Блок 16 запроса сигнала запуска может быть выполнен с возможностью уведомления водителя только о том, что распознано переключение сигнала регулирования дорожного движения в состояние, разрешающее движение, если переключение сигнала регулирования дорожного движения в состояние, разрешающее движение, будет распознано в отсутствие распознавания сигнала запуска, поданного водителем, после запроса сигнала запуска. Блок 16 запроса сигнала запуска может быть выполнен с возможностью не направлять никакого уведомления, даже если будет распознано переключение сигнала регулирования дорожного движения в состояние, разрешающее движение.
[0217] Автономная система 100 вождения не обязательно должна определять (S52, S62) возможность своевременной остановки транспортного средства. Если транспортное средство проезжает через целевую точку по маршруту движения в то время, когда обнаруживается отмена сигнала запуска водителя, блок 19 управления транспортным средством может инициировать замедление и остановку транспортного средства, даже если замедление увеличивается. Блок 16 запроса сигнала запуска может направлять водителю уведомление о переключении сигнала регулирования дорожного движения в состояние, отличающееся от состояния, разрешающего движение, независимо от возможности своевременной остановки транспортного средства. Автономная система 100 вождения может задать перекресток 60 в качестве целевой точки, даже если ситуация в зоне правого поворота на перекрестке 60 может быть распознана, например, если отсутствует здание 80, показанное на ФИГ. 10A.
[0218] Автономная система 100 вождения не обязательно должна направлять уведомление о начале замедления (S38 и S70). Автономная система 100 вождения может начинать замедление с целью остановки транспортного средства без уведомления о начале замедления.
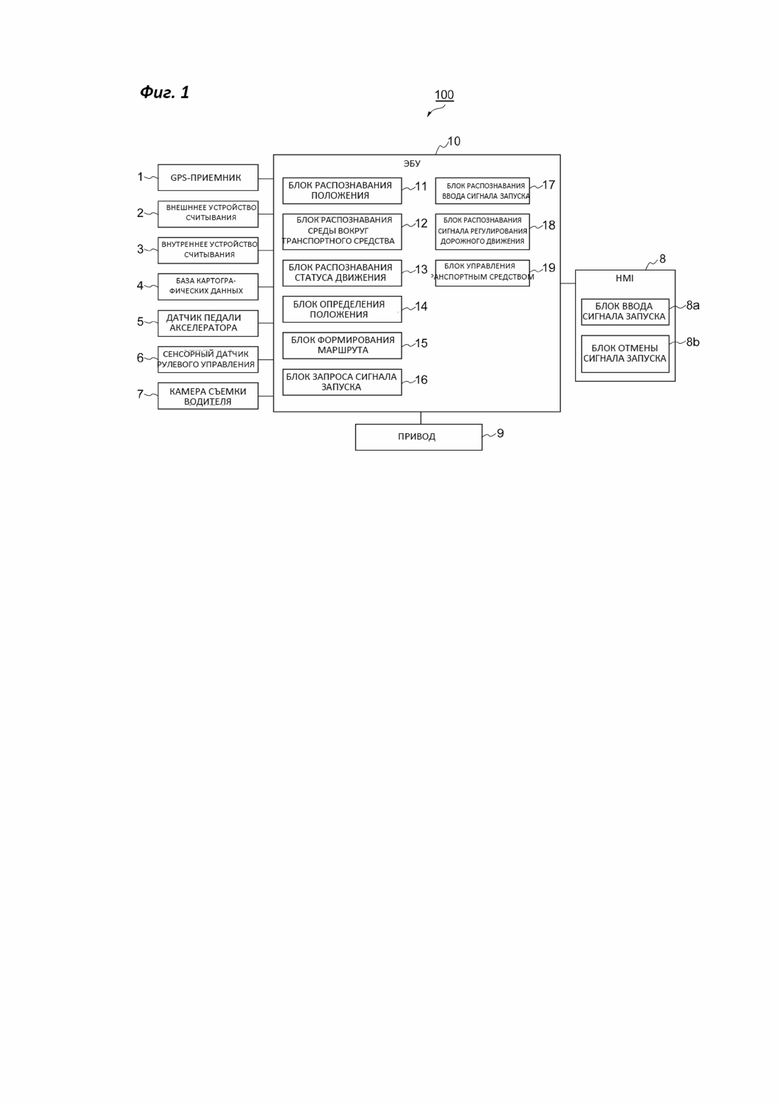
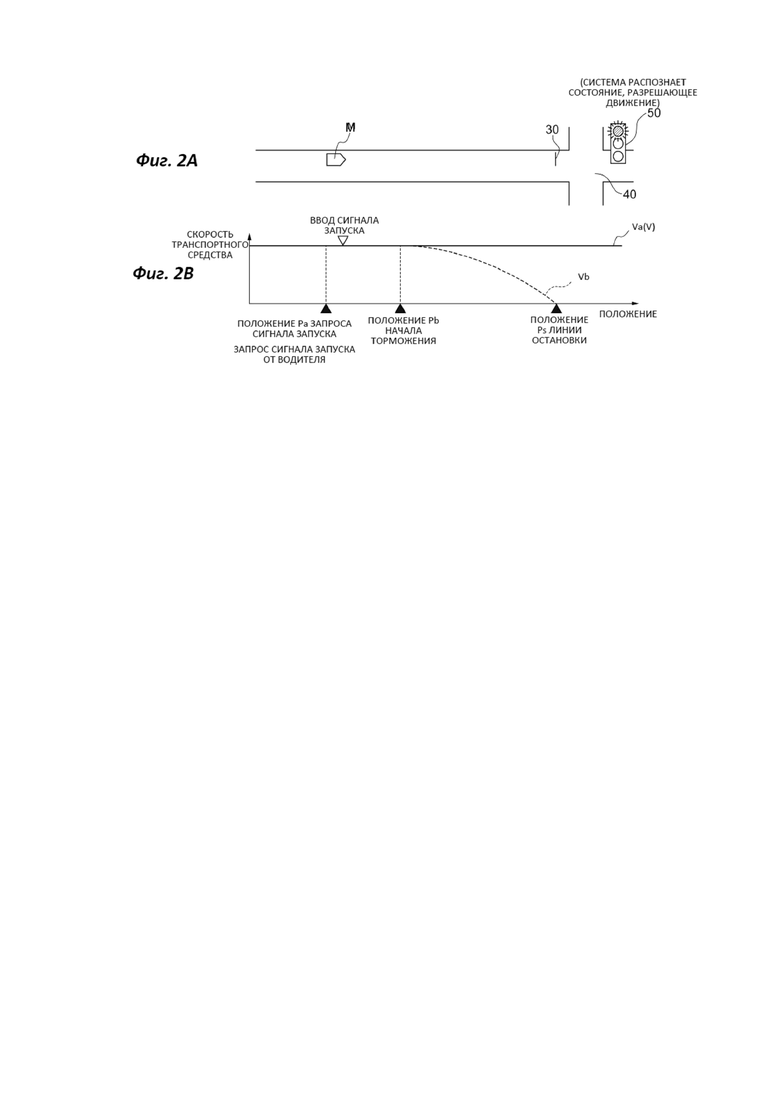
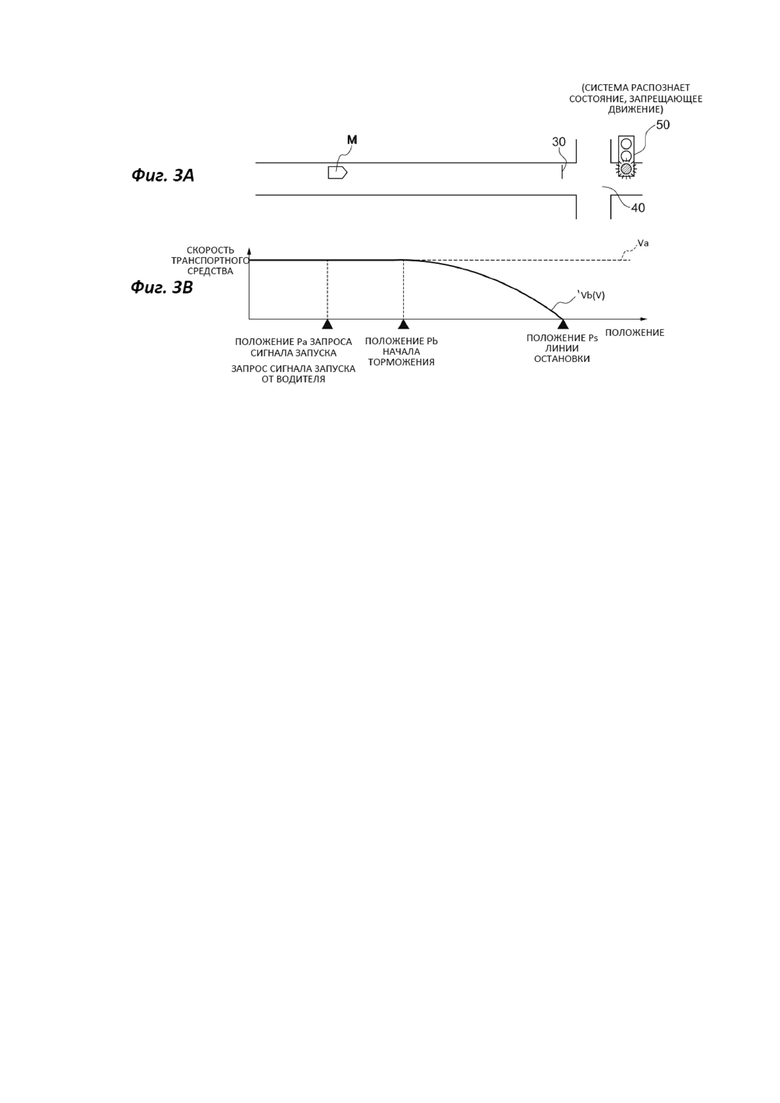
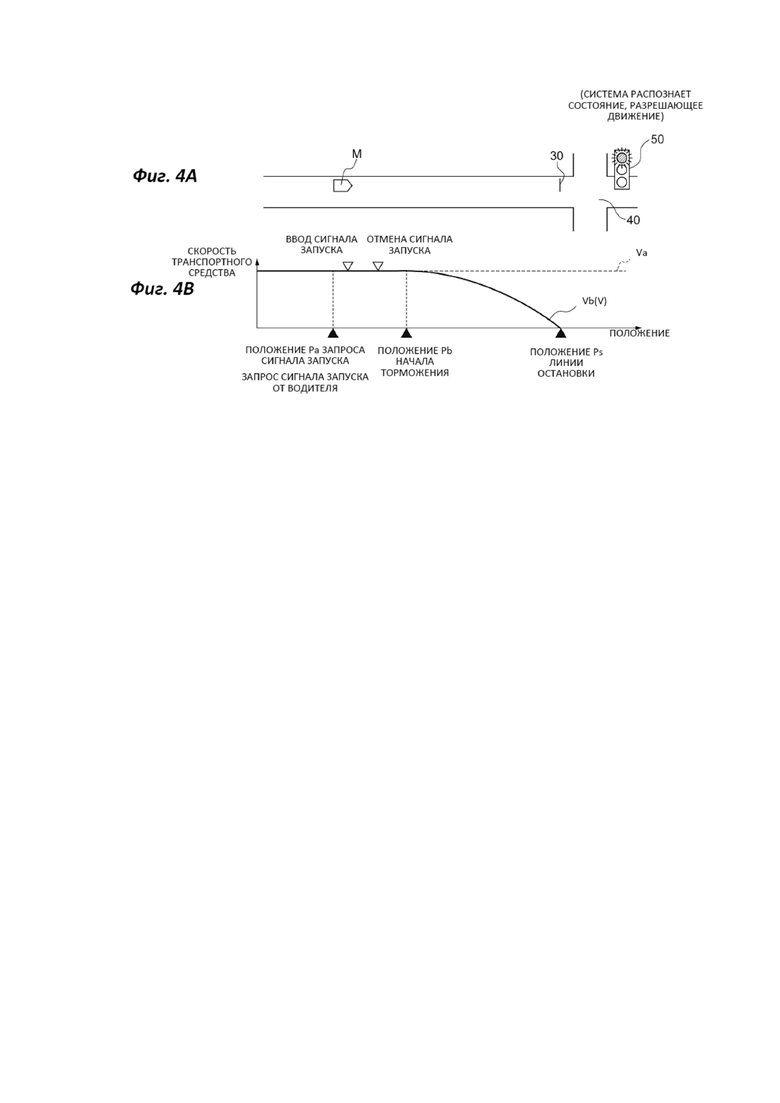
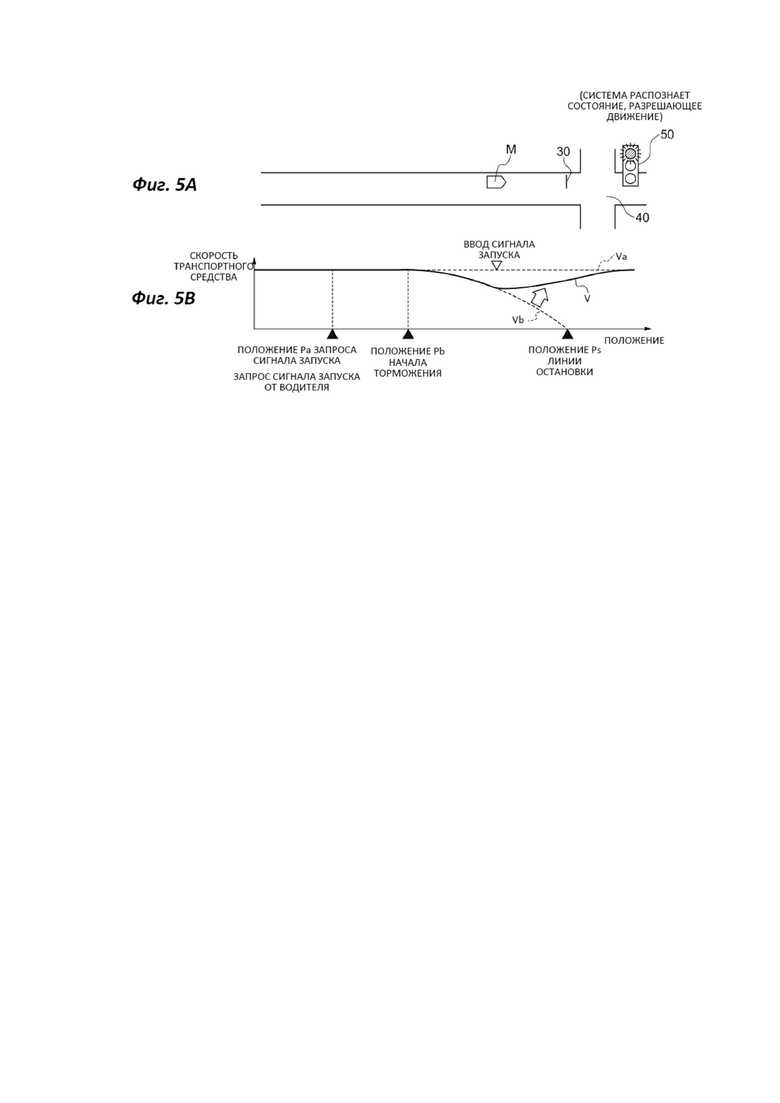
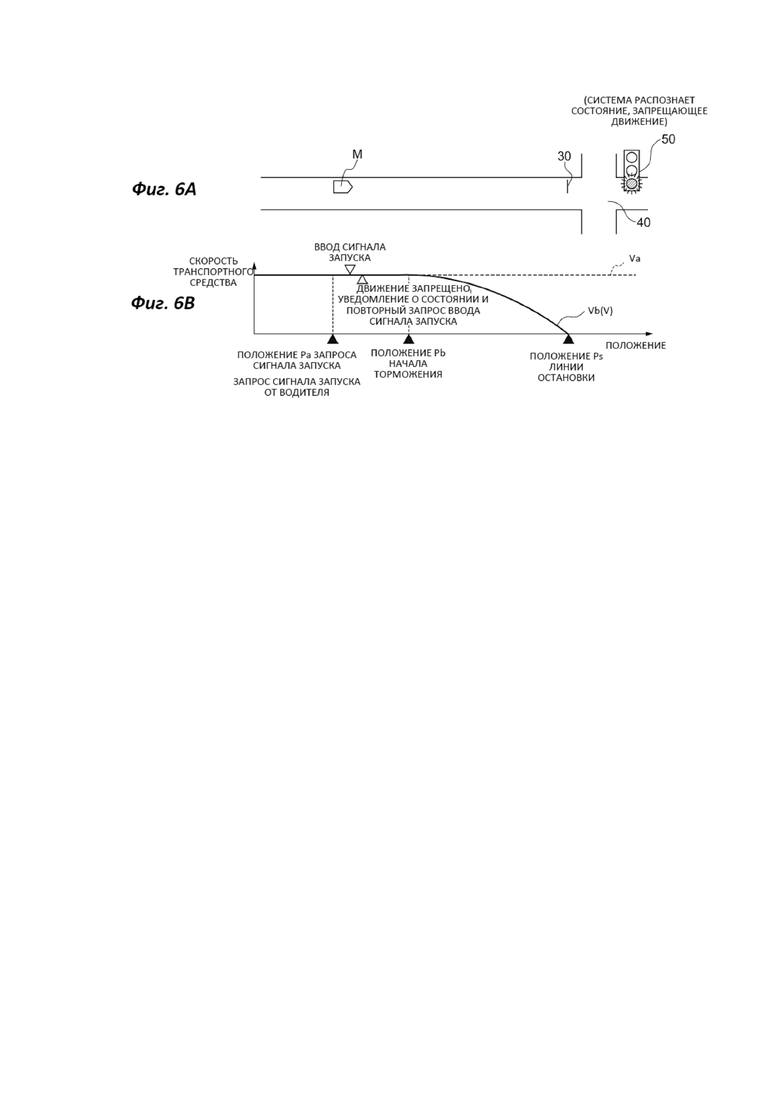
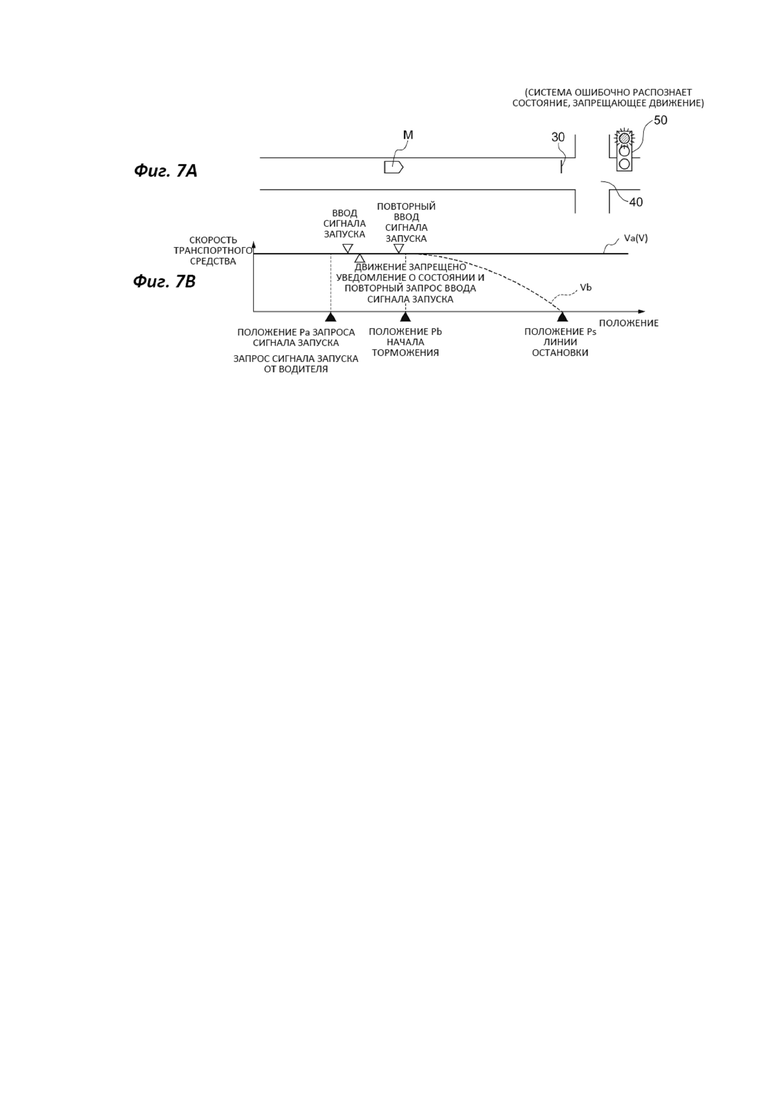
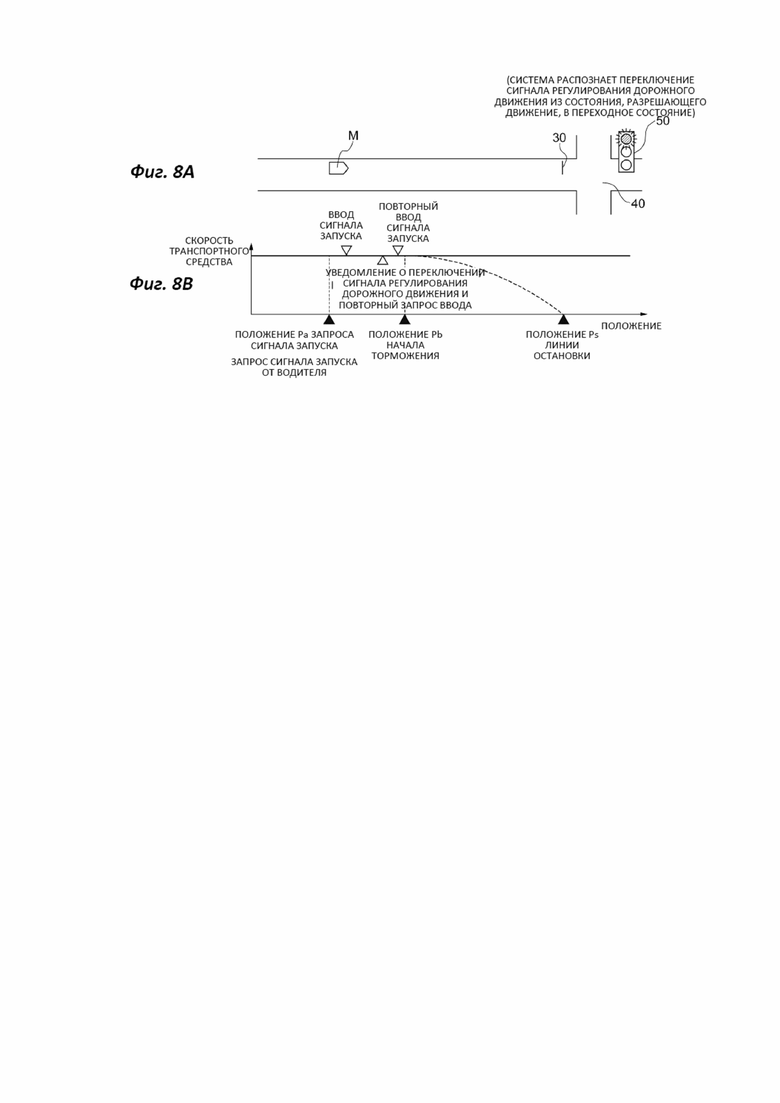
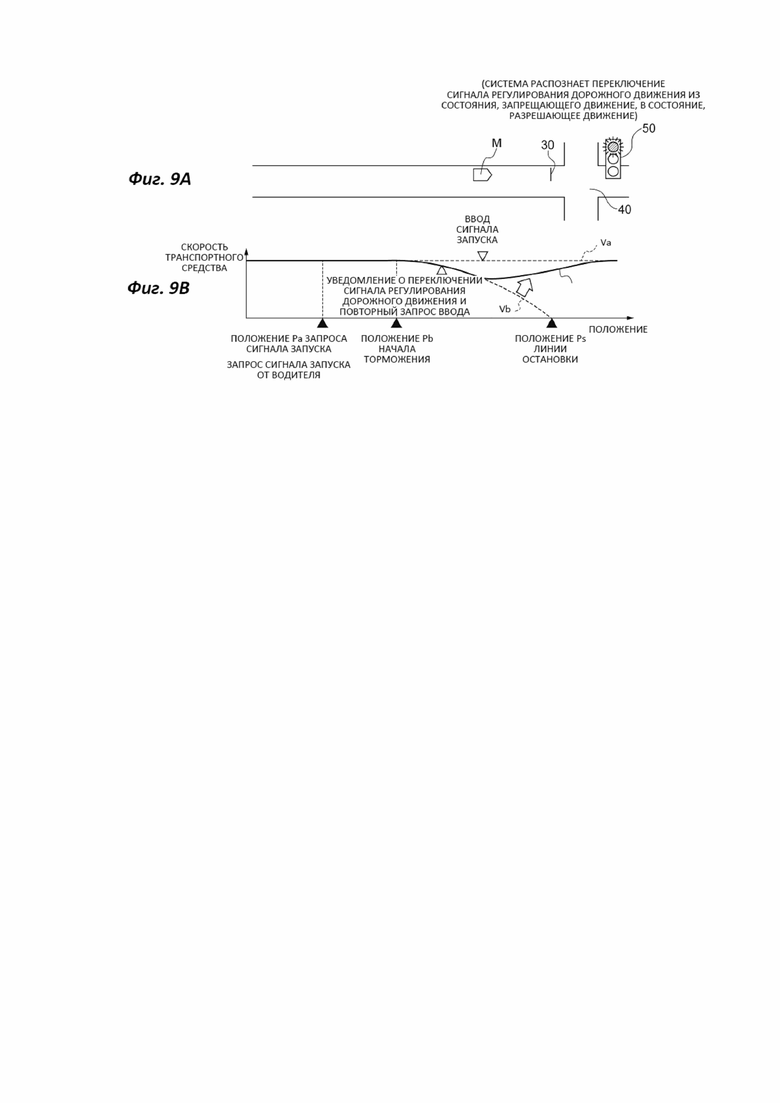
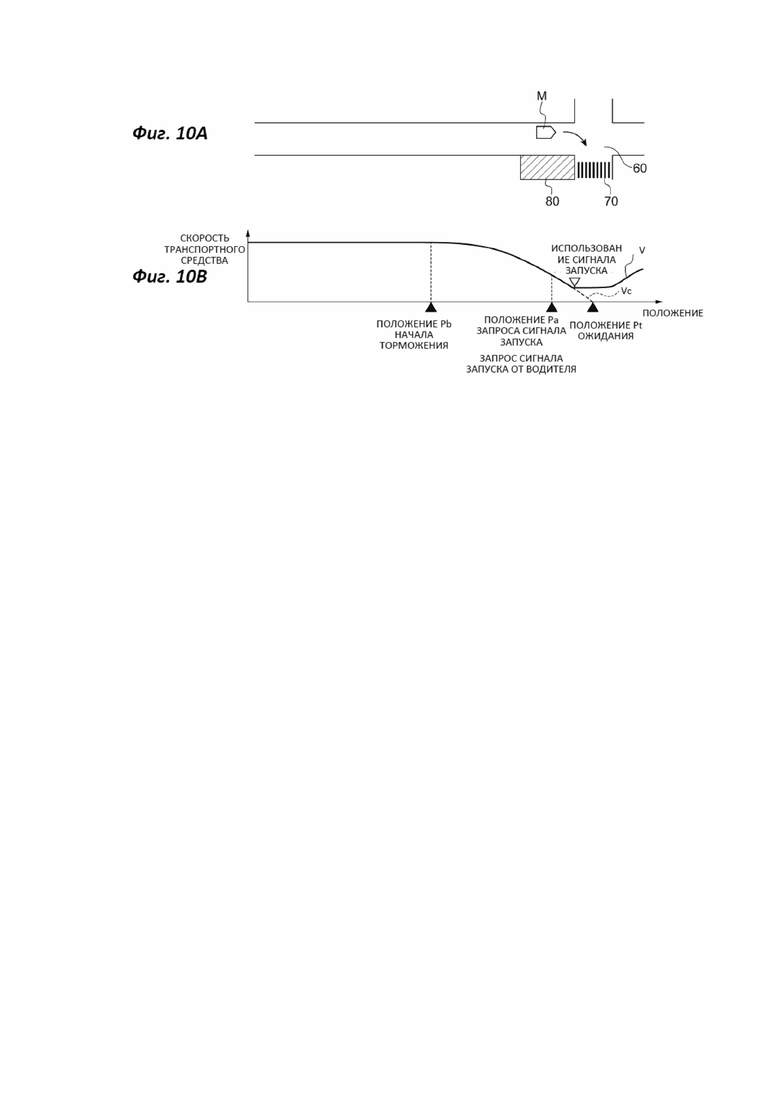
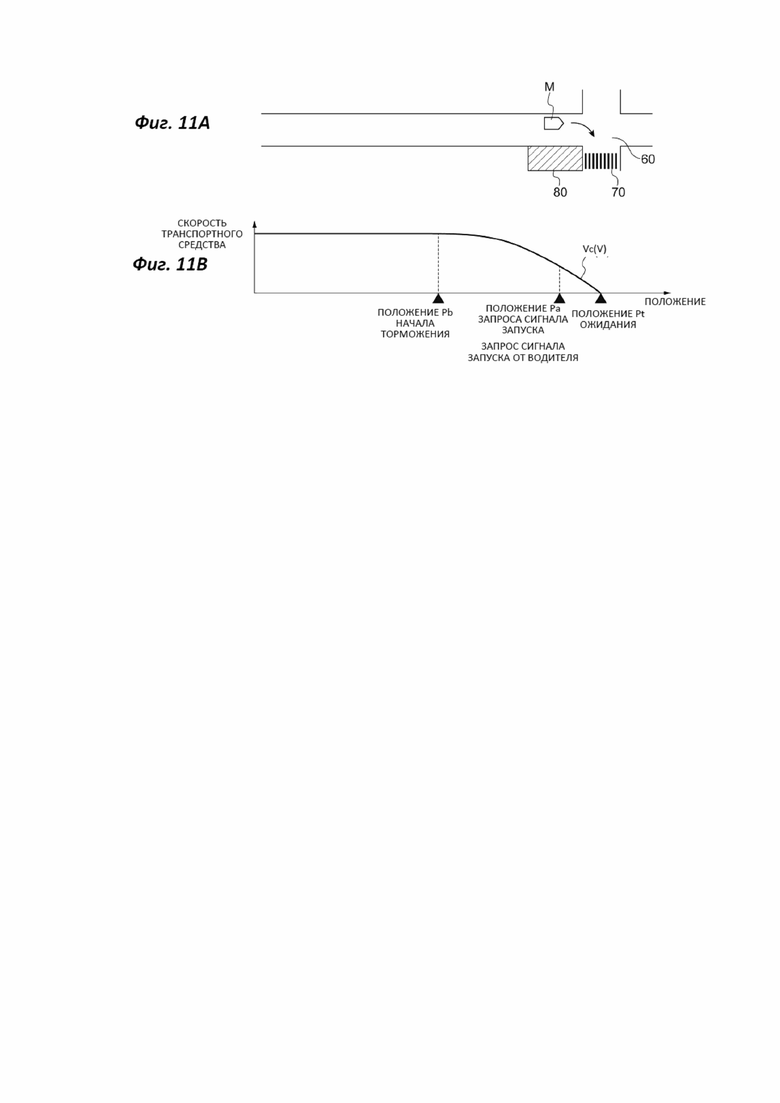
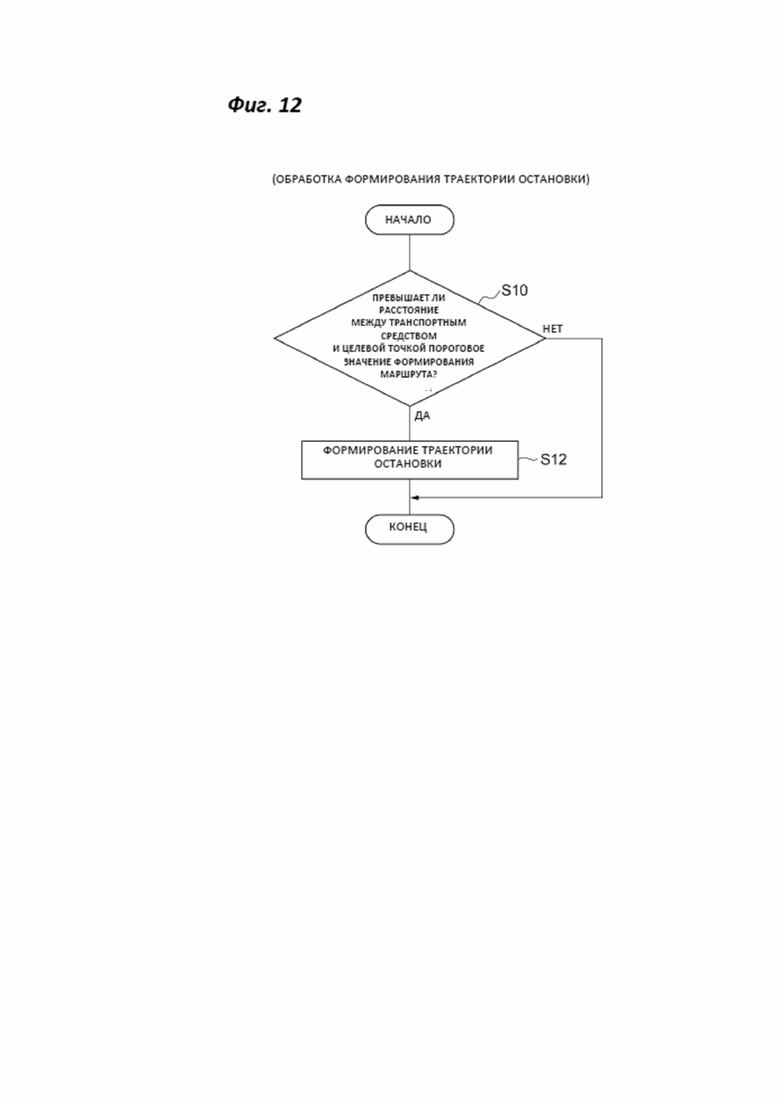
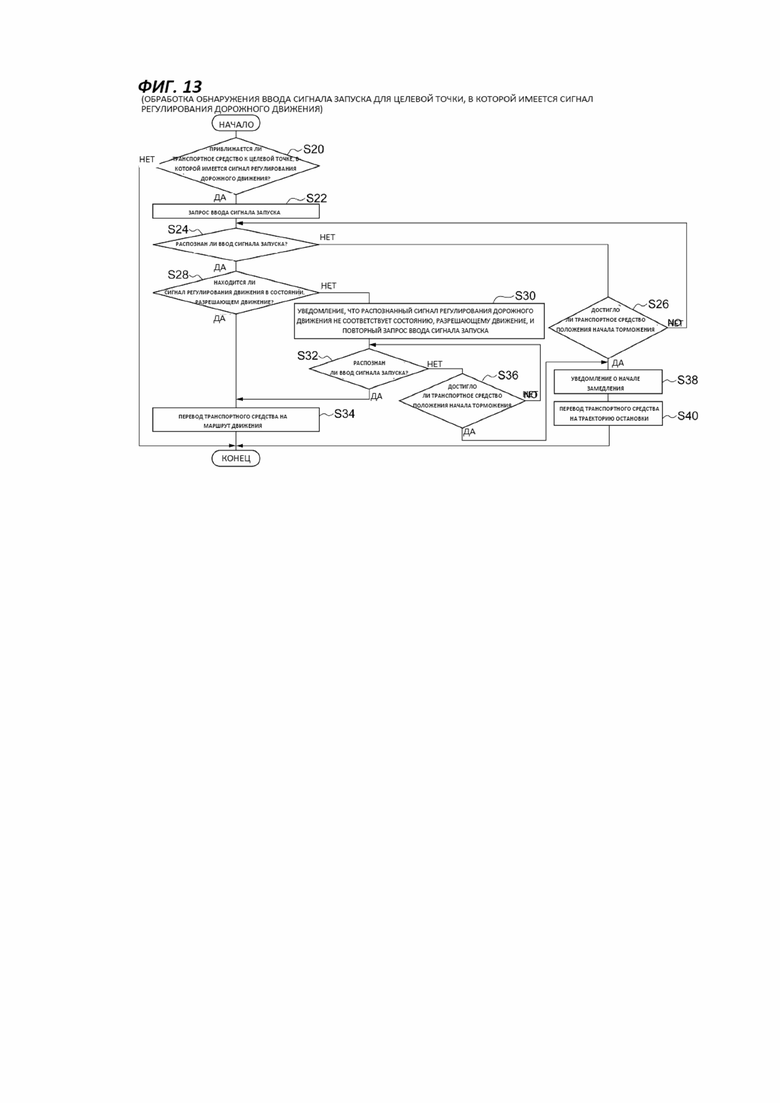
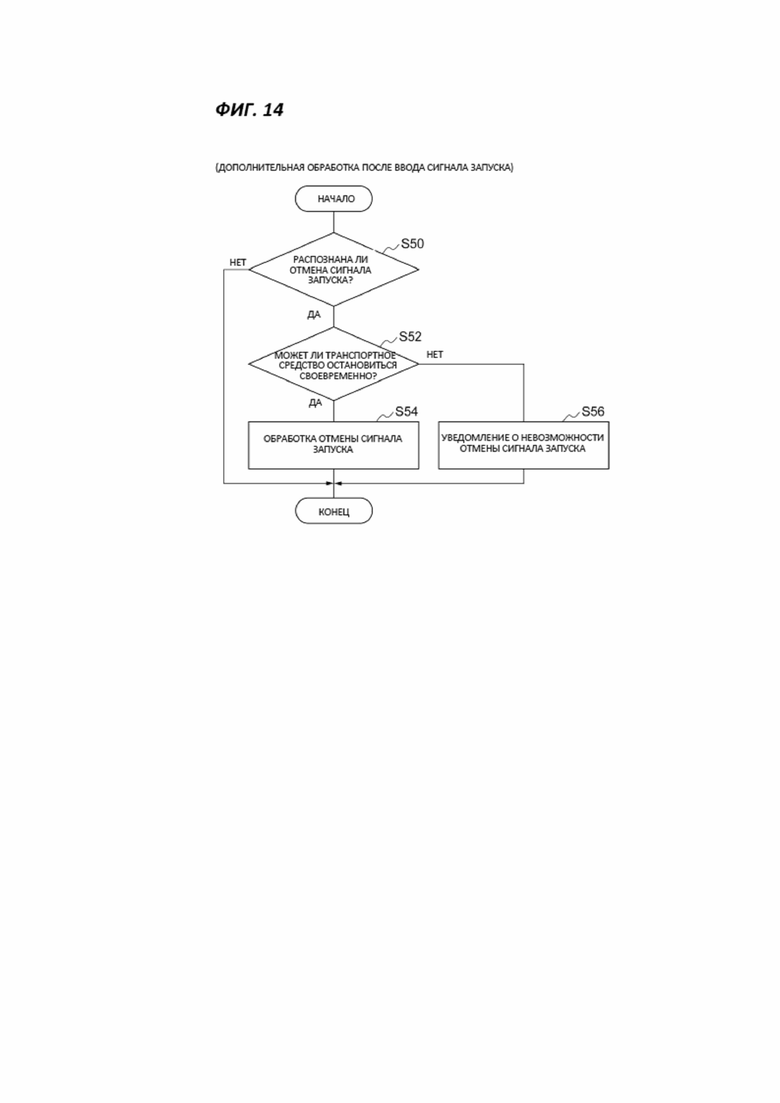
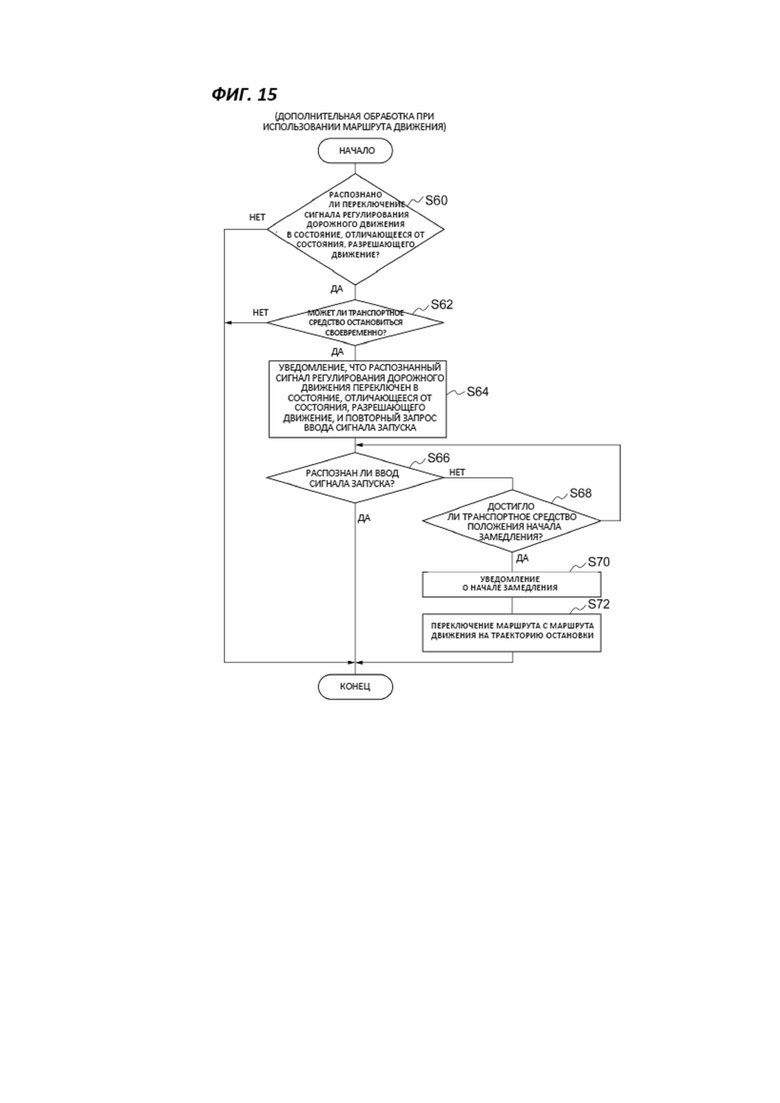
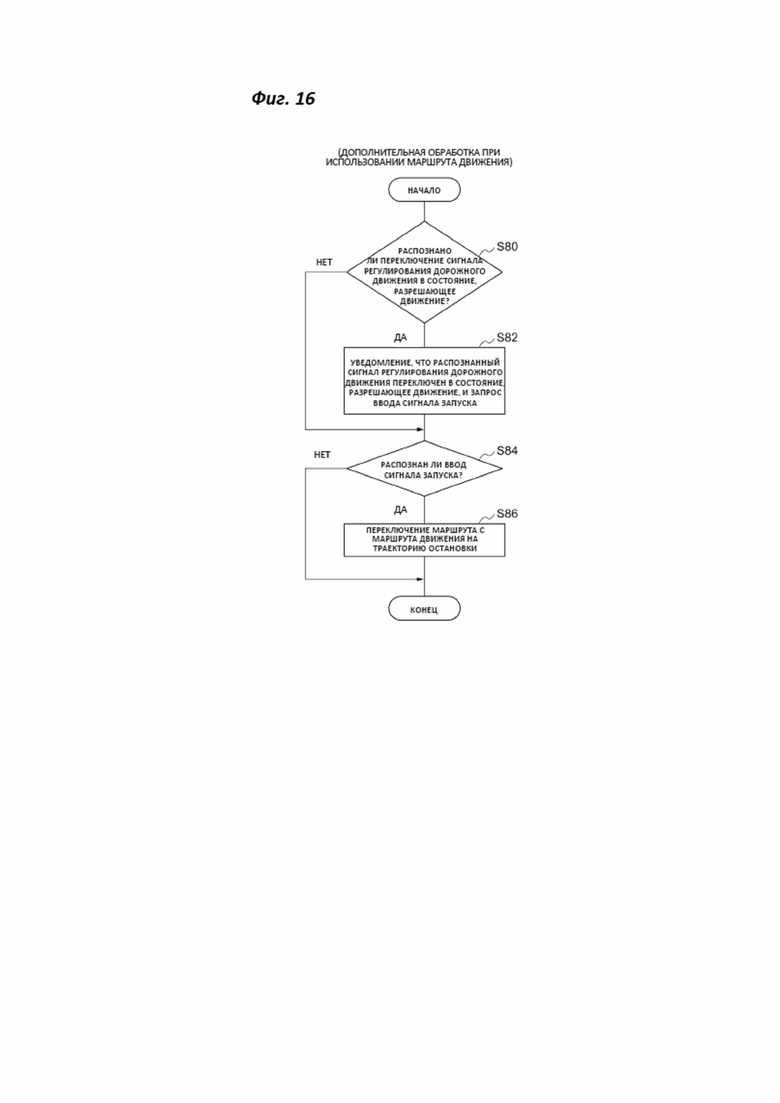
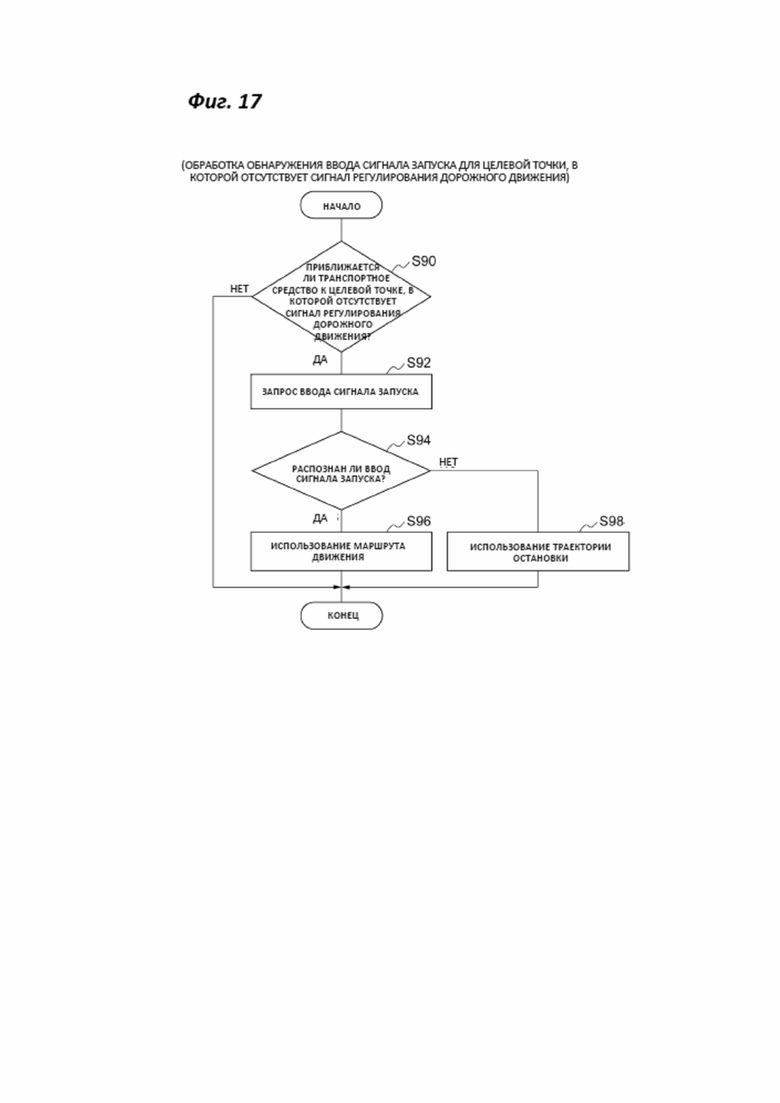
Заявленное изобретение относится к автономной системе вождения, которая выполнена с возможностью автономного управления транспортным средством и содержит блок запроса сигнала запуска, выполненный с возможностью запроса ввода сигнала запуска от водителя транспортного средства с целью обеспечения прохождения транспортного средства через целевую точку, если автономно управляемое транспортное средство приближается к предварительно заданной целевой точке, расположенной на маршруте движения транспортного средства, блок обнаружения ввода сигнала запуска, выполненный с возможностью обнаружения ввода сигнала запуска водителем, и блок управления транспортным средством, выполненный с возможностью обеспечения прохождения транспортного средства через целевую точку, если будет распознан ввод сигнала запуска, или замедления и остановки транспортного средства без прохождения через целевую точку, если ввод сигнала запуска не будет распознан. Заявленная система обеспечивает прохождение транспортного средства через целевую точку после получения от водителя решения о прохождении целевой точки или остановке, что минимизирует аварийные риски при перемещении автомобиля. 2 н. и 13 з.п. ф-лы, 27 ил.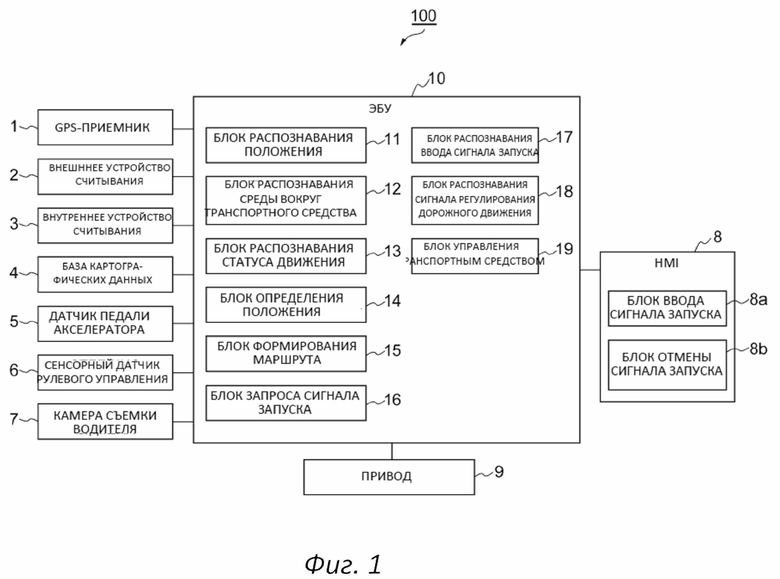
1. Автономная система вождения, выполненная с возможностью автономного управления транспортным средством и содержащая: блок запроса сигнала запуска, выполненный с возможностью запроса ввода сигнала запуска от водителя транспортного средства с целью обеспечения прохождения транспортного средства через целевую точку, если автономно движущееся транспортное средство приближается к предварительно заданной целевой точке, расположенной на маршруте движения транспортного средства; блок распознавания ввода сигнала запуска, выполненный с возможностью распознавания сигнала запуска, поданного водителем, и блок управления транспортным средством, выполненный с возможностью обеспечения прохождения транспортного средства через целевую точку, если будет распознан ввод сигнала запуска, или замедления и остановки транспортного средства без прохождения через целевую точку, если ввод сигнала запуска не будет распознан, в которой блок управления транспортным средством выполнен с возможностью инициации прохождения транспортного средства через целевую точку без замедления транспортного средства, если перед началом замедления транспортного средства, выполняемого с целью остановки транспортного средства без прохождения через целевую точку, будет распознан ввод сигнала запуска, в которой блок управления транспортным средством выполнен с возможностью прекращения замедления транспортного средства и инициации прохождения через целевую точку, если после начала замедления транспортного средства, выполняемого с целью остановки транспортного средства без прохождения через целевую точку, будет распознан ввод сигнала запуска.
2. Автономная система вождения по п. 1, дополнительно содержащая: блок распознавания сигнала регулирования дорожного движения, выполненный с возможностью распознавания состояния работы сигнала регулирования дорожного движения, расположенного в целевой точке и соответствующего маршруту движения транспортного средства,
в которой блок запроса сигнала запуска выполнен с возможностью уведомления водителя о том, что распознан сигнал регулирования дорожного движения, не разрешающий движение, и с возможностью повторного запроса ввода сигнала запуска, если распознан сигнал регулирования дорожного движения, не разрешающий движение, и ввод сигнала запуска, и
в которой блок управления транспортным средством выполнен с возможностью инициации прохождения транспортного средства через целевую точку, если будет распознан ввод сигнала запуска после повторного запроса ввода сигнала запуска, и с возможностью инициации замедления и остановки автономно управляемого транспортного средства без прохождения через целевую точку, если ввод сигнала запуска не будет распознан после повторного запроса ввода сигнала запуска.
3. Автономная система вождения по п. 2,
в которой блок запроса сигнала запуска выполнен с возможностью уведомления водителя о том, что распознано переключение сигнала регулирования дорожного движения в состояние, отличающееся от состояния разрешения движения, и с возможностью повторного запроса ввода сигнала запуска, если будет распознано переключение сигнала регулирования дорожного движения в состояние, отличающееся от состояния разрешения движения, после распознавания ввода сигнала запуска, и в которой блок управления транспортным средством выполнен с возможностью инициации прохождения транспортного средства через целевую точку, если будет распознан ввод сигнала запуска после повторного запроса ввода сигнала запуска, и с возможностью инициации замедления и остановки автономно управляемого транспортного средства без прохождения через целевую точку, если ввод сигнала запуска не будет распознан после повторного запроса ввода сигнала запуска.
4. Автономная система вождения по п. 2, в которой блок распознавания ввода сигнала запуска выполнен с возможностью распознавания в качестве ввода сигнала запуска, по меньшей мере, двух из следующих операций: осуществление водителем ручного управления блоком ввода сигнала запуска в транспортном средстве, нажатие водителем педали акселератора транспортного средства и прикосновение водителя к сенсорному датчику транспортного средства, и в которой при повторном запросе ввода сигнала запуска блок запроса сигнала запуска выполнен с возможностью запроса от водителя управляющего действия, отличающегося от ввода сигнала запуска перед повторным запросом.
5. Способ управления автономной системой вождения, осуществляющей автономное вождение транспортного средства, содержащий: этап запроса ввода сигнала запуска от водителя транспортного средства с целью обеспечения прохождения транспортного средства через целевую точку, если автономно движущееся транспортное средство приближается к предварительно заданной целевой точке; этап распознавания сигнала запуска, поданного водителем; и этап управления автономным вождением транспортного средства для обеспечения прохождения транспортного средства через целевую точку, если будет распознан ввод сигнала запуска, или замедления и остановки транспортного средства без прохождения через целевую точку, если ввод сигнала запуска не будет распознан, в котором на этапе управления транспортным средством происходит инициация прохождения транспортного средства через целевую точку без замедления транспортного средства, если перед началом замедления транспортного средства, выполняемого с целью остановки транспортного средства без прохождения через целевую точку, распознан ввод сигнала запуска.
6. Способ управления автономной системой вождения по п. 5, в котором на этапе управления транспортным средством происходит прекращение замедления транспортного средства и инициация прохождения через целевую точку, если после начала замедления транспортного средства, выполняемого с целью остановки транспортного средства без прохождения через целевую точку, распознан ввод сигнала запуска.
7. Способ управления автономной системой вождения по п. 5, дополнительно содержащий: этап распознавания состояния работы сигнала регулирования дорожного движения, расположенного в целевой точке и соответствующего маршруту движения транспортного средства; и этап первого повторного запроса для уведомления водителя о том, что распознан сигнал регулирования дорожного движения, не разрешающий движение, и осуществление повторного запроса ввода сигнала запуска, если распознан сигнал регулирования дорожного движения, не разрешающий движение, и ввод сигнала запуска, в котором на этапе управления транспортным средством инициируется прохождение транспортного средства через целевую точку, если ввод сигнала запуска распознан после повторного запроса ввода сигнала запуска, и замедление и остановка автономно управляемого транспортного средства без прохождения через целевую точку, если ввод сигнала запуска не распознан после повторного запроса ввода сигнала запуска.
8. Способ управления автономной системой вождения по п. 7, дополнительно содержащий: этап второго повторного запроса для уведомления водителя о том, что распознано переключение сигнала регулирования дорожного движения в состояние, отличающееся от состояния разрешения движения, и повторного запроса ввода сигнала запуска, если будет распознано переключение сигнала регулирования дорожного движения в состояние, отличающееся от состояния разрешения движения, после распознавания ввода сигнала запуска, в котором на этапе управления транспортным средством инициируется прохождение транспортного средства через целевую точку, если ввод сигнала запуска распознан после повторного запроса ввода сигнала запуска, и замедление и остановка автономно управляемого транспортного средства без прохождения через целевую точку, если ввод сигнала запуска не распознан после повторного запроса ввода сигнала запуска.
9. Способ управления автономной системой вождения по п. 7, в котором на этапе распознавания ввода сигнала запуска происходит распознавание в качестве ввода сигнала запуска, по меньшей мере, двух из следующих операций: осуществление водителем ручного управления блоком ввода сигнала запуска в транспортном средстве, нажатие водителем педали акселератора транспортного средства и прикосновение водителя к сенсорному датчику транспортного средства, и в котором на этапе запроса ввода сигнала запуска при повторном запросе ввода сигнала запуска от водителя запрашивается управляющее действие, отличающееся от ввода сигнала запуска перед повторным запросом.
10. Автономная система вождения по п. 1, дополнительно содержащая: блок распознавания сигнала регулирования дорожного движения, выполненный с возможностью распознавания состояния работы сигнала регулирования дорожного движения, расположенного в целевой точке и соответствующего маршруту движения транспортного средства, в которой блок запроса сигнала запуска выполнен с возможностью уведомления водителя о том, что распознан сигнал регулирования дорожного движения, не разрешающий движение, и с возможностью повторного запроса ввода сигнала запуска, если распознан сигнал регулирования дорожного движения, не разрешающий движение, и ввод сигнала запуска, и в которой блок управления транспортным средством выполнен с возможностью инициации прохождения транспортного средства через целевую точку, если будет распознан ввод сигнала запуска после повторного запроса ввода сигнала запуска, и с возможностью инициации замедления и остановки автономно управляемого транспортного средства без прохождения через целевую точку, если ввод сигнала запуска не будет распознан после повторного запроса ввода сигнала запуска.
11. Автономная система вождения по п. 1, дополнительно содержащая: блок распознавания сигнала регулирования дорожного движения, выполненный с возможностью распознавания состояния работы сигнала регулирования дорожного движения, расположенного в целевой точке и соответствующего маршруту движения транспортного средства, в которой блок запроса сигнала запуска выполнен с возможностью уведомления водителя о том, что распознан сигнал регулирования дорожного движения, не разрешающий движение, и с возможностью повторного запроса ввода сигнала запуска, если распознан сигнал регулирования дорожного движения, не разрешающий движение, и ввод сигнала запуска, и
в которой блок управления транспортным средством выполнен с возможностью инициации прохождения транспортного средства через целевую точку, если будет распознан ввод сигнала запуска после повторного запроса ввода сигнала запуска, и с возможностью инициации замедления и остановки автономно управляемого транспортного средства без прохождения через целевую точку, если ввод сигнала запуска не будет распознан после повторного запроса ввода сигнала запуска.
12. Автономная система вождения по п. 3, в которой блок распознавания ввода сигнала запуска выполнен с возможностью распознавания в качестве ввода сигнала запуска, по меньшей мере, двух из следующих операций: осуществление водителем ручного управления блоком ввода сигнала запуска в транспортном средстве, нажатие водителем педали акселератора транспортного средства и прикосновение водителя к сенсорному датчику транспортного средства, и в которой при повторном запросе ввода сигнала запуска блок запроса сигнала запуска выполнен с возможностью запроса от водителя управляющего действия, отличающегося от ввода сигнала запуска перед повторным запросом.
13. Способ управления автономной системой вождения по п. 7, дополнительно содержащий: этап распознавания состояния работы сигнала регулирования дорожного движения, расположенного в целевой точке и соответствующего маршруту движения транспортного средства; и этап первого повторного запроса для уведомления водителя о том, что распознан сигнал регулирования дорожного движения, не разрешающий движение, и осуществление повторного запроса ввода сигнала запуска, если распознан сигнал регулирования дорожного движения, не разрешающий движение, и ввод сигнала запуска, в котором на этапе управления транспортным средством инициируется прохождение транспортного средства через целевую точку, если ввод сигнала запуска распознан после повторного запроса ввода сигнала запуска, и замедление и остановка автономно управляемого транспортного средства без прохождения через целевую точку, если ввод сигнала запуска не распознан после повторного запроса ввода сигнала запуска.
14. Способ управления автономной системой вождения по п. 6, дополнительно содержащий: этап распознавания состояния работы сигнала регулирования дорожного движения, расположенного в целевой точке и соответствующего маршруту движения транспортного средства; и этап первого повторного запроса для уведомления водителя о том, что распознан сигнал регулирования дорожного движения, не разрешающий движение, и осуществление повторного запроса ввода сигнала запуска, если распознан сигнал регулирования дорожного движения, не разрешающий движение, и ввод сигнала запуска, в котором на этапе управления транспортным средством инициируется прохождение транспортного средства через целевую точку, если ввод сигнала запуска распознан после повторного запроса ввода сигнала запуска, и замедление и остановка автономно управляемого транспортного средства без прохождения через целевую точку, если ввод сигнала запуска не распознан после повторного запроса ввода сигнала запуска.
15. Способ управления автономной системой вождения по п. 8,
в котором на этапе распознавания ввода сигнала запуска происходит распознавание в качестве ввода сигнала запуска, по меньшей мере, двух из следующих операций: осуществление водителем ручного управления блоком ввода сигнала запуска в транспортном средстве, нажатие водителем педали акселератора транспортного средства и прикосновение водителя к сенсорному датчику транспортного средства, и в котором на этапе запроса ввода сигнала запуска при повторном запросе ввода сигнала запуска от водителя запрашивается управляющее действие, отличающееся от ввода сигнала запуска перед повторным запросом.
| US 2017220045 A1, 03.08.2017 | |||
| US 2006167784 A1, 27.07.2006 | |||
| US 2007087756 A1, 19.04.2007 | |||
| US 2008109343 A1, 08.05.2008. |

