Изобретение относится к области бронетанкового вооружения и может быть использовано для автоматизации выверки нулевых линий прицеливания прицелов с вооружением на танках, боевых машинах пехоты, бронетранспортерах, артиллерийских системах и наземных роботизированных, в том числе автономных и дистанционно управляемых разведывательно-ударных комплексах военного назначения, и т.п. Изобретение рассчитано прежде всего на современные прицелы с цифровыми оптико-электронными каналами.
Прицелы современных образцов бронетанкового вооружения как правило имеют оптико-электронную часть, предназначенную для преобразования невидимого для человеческого глаза излучения в электрический сигнал, на основании которого затем формируется видимое для оператора изображение. На сегодняшний день в составе прицелов бронетанкового вооружения наиболее распространены тепловизионные оптико-электронные части (тепловизоры), также активно применяются приборы ночного видения и телевизионные камеры.
При этом независимо от спектрального диапазона, в котором работает прицел, любая его оптико-электронная часть имеет объектив, предназначенный для формирования резкого изображения и фотоприемное устройство (ФПУ) для преобразования излучения в электрический сигнал. В современном исполнении роль ФПУ как правило выполняют фото-матрицы, например, ПЗС, ПЗИ, или болометрические.
Это позволяет оптико-электронную часть любого прицела рассматривать как некоторую j-ю видеокамеру (Фиг. 1) Кj, где j - индекс, указывающий на принадлежность к соответствующим прицелам, например, j=К для прицела командира (ПК), j=Н для прицела наводчика (ПН) или j=КН для прицела-дублера наводчика (ПДН) КНД, j=П для камеры КП, закрепляемой на срезе вооружения (пушки) и т.д., в которой получаемое с нее цифровое изображение Imgj может быть отождествлено с реальным физическим изображением, сфокусированным ее объективом в задней фокальной плоскости на ФПУ (фото-матрице).
Цифровые изображения Imgj получаемые с камеры пушки и камер прицелов, состоят из пикселей. Каждый пиксель характеризуется значением, которое состоит из полутонового значения или цветового значения. В полутоновых изображениях значение пикселя представляет собой одну величину, которая характеризует яркость пикселя. Наиболее общим форматом описания пикселя является байт изображения, в котором значение пикселя представлено восьмиразрядным целым числом, лежащим в диапазоне возможных значений от 0 до 255. Как правило, значение пикселя, равное нулю, используют для обозначения черного пикселя, а значение 255 используют для обозначения белого пикселя. Промежуточные значения описывают различные оттенки полутонов. В цветных изображениях для описания каждого пикселя (расположенного в цветовом пространстве размерности RGB - красный, зеленый, синий) должны быть отдельно определены красная, зеленая и синяя компоненты. Иными словами, значение пикселя фактически представляет собой вектор, описанный тремя числами. Три различные компоненты могут быть сохранены как три отдельных полутоновых изображения, известные как цветовые плоскости (по одной для красного, зеленого и синего цветов), которые можно воссоединять при отображении или при обработке.
При этом размеры пикселей изображения Imgj (Фиг. 1) принимают равными в соответственно в горизонтальной и вертикальной плоскостях физическим размерам  и
и  фотоячеек (пикселей) ФПУ (например, ПЗС- или ПЗИ-матриц) j-ой камеры прицела или камеры пушки, при этом значения
фотоячеек (пикселей) ФПУ (например, ПЗС- или ПЗИ-матриц) j-ой камеры прицела или камеры пушки, при этом значения  и
и  задают из технических данных ФПУ камеры Кj, или определяют в процессе ее внутренней калибровки. Изображения Imgj принимают размещенными на фокусных расстояниях ƒj объективов этих камер (соответственно, в положительных направлениях осей OjZj систем координат OjXjYjZj этих камер), при этом значение ƒj задают из технических данных объектива, применяемой камеры, или определяют в процессе ее внутренней калибровки. Геометрические размеры изображения Imgj и его горизонтальное Nj и вертикальное Mj разрешение, приравниваемое к размерам ФПУ (фото-матрицы), задают из технических данных используемого ФПУ или определяют в результате внутренней калибровки камеры.
задают из технических данных ФПУ камеры Кj, или определяют в процессе ее внутренней калибровки. Изображения Imgj принимают размещенными на фокусных расстояниях ƒj объективов этих камер (соответственно, в положительных направлениях осей OjZj систем координат OjXjYjZj этих камер), при этом значение ƒj задают из технических данных объектива, применяемой камеры, или определяют в процессе ее внутренней калибровки. Геометрические размеры изображения Imgj и его горизонтальное Nj и вертикальное Mj разрешение, приравниваемое к размерам ФПУ (фото-матрицы), задают из технических данных используемого ФПУ или определяют в результате внутренней калибровки камеры.
В случае допущения погрешностей при производстве оптико-электронной части прицела (камеры), при которых ФПУ может своим геометрическим центром не совпадать с оптической осью Ij объектива камеры (Фиг. 1), различают следующие величины  ,
,  - это расстояния, соответственно в горизонтальной и вертикальной плоскостях, между геометрическим центрами ФПУ
- это расстояния, соответственно в горизонтальной и вертикальной плоскостях, между геометрическим центрами ФПУ  и центром изображения
и центром изображения  , формируемого объективом камеры Кj, при этом значения
, формируемого объективом камеры Кj, при этом значения  и
и  задают из технических данных камеры, или определяют в процессе ее внутренней калибровки.
задают из технических данных камеры, или определяют в процессе ее внутренней калибровки.
Если в поле зрения камеры (камеры прицела или камеры пушки) находится объект Р (Фиг. 1), то на цифровом изображении Imgj изображению  этого объекта будет соответствовать пиксель, положение которого на изображении Imgj будет характеризоваться номером строки nj и столбца mj в пиксельной системе координат.
этого объекта будет соответствовать пиксель, положение которого на изображении Imgj будет характеризоваться номером строки nj и столбца mj в пиксельной системе координат.
Прицелы, применяемые на образцах бронетанкового вооружения, как правило, применяются модульной или перископической конструкции.
В прицелах модульной конструкции камера располагается в надброневом пространстве боевой машины в блоке прицела. Изменение поля зрения, а также стабилизация в них реализуется за счет приводов самой камеры или всего блока целиком. Например, на фигурах 2…6 прицел командира представлен в модульном исполнении, где предполагается в горизонтальной плоскости поворот всего блока с камерой, а в вертикальной - только камеры за счет ее приводов внутри блока прицела.
Классическая конструкция перископического прицела с оптико-электронным каналом предполагает размещение камеры таким образом, чтобы оптическая ось ее объектива была направлена снизу-вверх на качающееся головное зеркало (ГЗ) прицела. ГЗ располагается внутри головного блока прицела в надброневом пространстве (Фиг. 5). Камера располагается под углом (как правило 45°) к плоскости зеркала в заброневом пространстве образца вооружения на глубине hj (для прицелов модульной конструкции величина hj равна нулю). Изображение Imgj камеры прицела располагается вдоль оптической оси ее объектива, отраженной в точке  плоскости ГЗ на расстоянии ƒ'j. При чем сумма величины глубины размещения камеры hj и расстояния ƒ'j определяется фокусным расстоянием объектива камеры, т.е.
плоскости ГЗ на расстоянии ƒ'j. При чем сумма величины глубины размещения камеры hj и расстояния ƒ'j определяется фокусным расстоянием объектива камеры, т.е.

В качестве примера прицел наводчика ПН на фигурах 2…6 представлен в виде прицела с перископической конструкцией.
На изображениях Imgj j-ых прицелов (Фиг. 2), получаемых с камер прицелов, для ведения огня формируются (наносятся, отображаются) центральные прицельные марки (ЦПМ). Оси, проходящие через оптические центры объективов камер j-ых прицелов и ЦПМ на их изображениях Imgj, являются осями прицеливания OПj.
Положение ЦПМ на изображениях Imgj задается точками sj (Фиг. 2). В свою очередь положение (координаты) точек sj в плоскости изображений Imgj задаются относительно их физических центров  .
.
В процессе эксплуатации танков и боевых машин от дорожно-транспортных и стрельбовых возмущений происходит сбивание выверки (рассогласование) прицела с пушкой. Рассогласование иногда может достигать 1,5 мрад. Такое сбивание выверки составляет большую погрешность технической подготовки стрельбы.
С целью исключения такой погрешности, во всех случаях перед стрельбой проводится подготовка комплекса вооружения, составляющей частью которой является подготовка к работе и выверка приборов прицеливания и наблюдения (далее выверка).
Качественно проведенная выверка обеспечивает точность стрельбы из вооружения по целям на разных дистанциях. В современных бронированных боевых машинах в зависимости от измеренной дальности до цели баллистический вычислитель рассчитывает поправки и формирует команды управления для ориентации вооружения таким образом, чтобы обеспечить наведения вооружения на данную цель. При этом в алгоритм расчета заложены соответствующие характеристикам прицелов дальности  выверки прицелов. Если выверка была проведена неточно, и в ее результате значения дальности
выверки прицелов. Если выверка была проведена неточно, и в ее результате значения дальности  отличались от требуемых или положение точек sj на изображениях Imgj были заданы с погрешностью, то при вычислении поправок для стрельбы будут присутствовать ошибки, что неминуемо приведет к снижению точности стрельбы.
отличались от требуемых или положение точек sj на изображениях Imgj были заданы с погрешностью, то при вычислении поправок для стрельбы будут присутствовать ошибки, что неминуемо приведет к снижению точности стрельбы.
Таким образом качество приведения выверки прицелов оказывает существенное влияние на результаты стрельбы. Поэтому все вооружение, находящееся в подразделениях, должно быть всегда приведено к нормальному бою и иметь выверенные прицелы.
Выверка осуществляется при поступлении вооружения в подразделение, после ремонта, замены частей, которые могли бы изменить бой вооружения, при обнаружении во время стрельбы отклонений снарядов, пуль, не удовлетворяющие требованиям нормального боя.
В боевой обстановке должны быть использованы все возможности для выверки прицелов и приведения вооружения к нормальному бою. Поэтому важным является обеспечение максимальной простоты и быстроты процесса выверки, что может быть достигнуто за счет автоматизации этого процесса.
Сущность выверки заключается в согласовании оси прицеливания ОПj, каждого j-го прицела с действительной осью канала ствола (ДОКС) IП в точках Sj находящихся на дальностях  выверки, задаваемых исходя из дальности эффективной стрельбы для каждого прицела отдельно. Для примера на фигуре 2 для прицелов наводчика ПН и командира ПК, дальностям их выверки соответствуют величины
выверки, задаваемых исходя из дальности эффективной стрельбы для каждого прицела отдельно. Для примера на фигуре 2 для прицелов наводчика ПН и командира ПК, дальностям их выверки соответствуют величины  и
и  .
.
Известными способами выверки нулевой линии прицелов образцов бронетанкового вооружения являются: по удаленной точке, по контрольно-выверочной мишени (КВМ). Кроме того, для контроля выверки применяют устройство встроенного контроля по индексу пушки.
Аналогом к изобретению является способ выверки нулевой линий прицелов по КВМ или удаленной точке с использованием оптической трубки (специальной конструкции для различного вооружения) [Приведение вооружения танков, БМП, БТР и стрелкового оружия к нормальному бою [Текст]: Учебное пособие / И.Ю. Слесаренко, Ю.С.Мальцев, А.В. Елизаров. - Омск: ОАБИИ, 2015. - 153 с.], которую перед проведением выверки устанавливают в ствол со стороны среза канала ствола или со стороны казенника так, чтобы ее оптическая ось после размещения была совмещена с осью канала ствола. При этом если оптическую трубку устанавливают в казенной части ствола, то на его срезе дополнительно закрепляют по специальным рискам перекрестие из нитей для определения направления ДОКС IП.
Выверка проводится для каждого прицела отдельно. При этом выбирают в поле зрения выверяемого прицела хорошо видимую с четким контуром точку Sj, удаленную от среза канала ствола вооружения на расстоянии  (например, для танковых прицелов наводчика ПН
(например, для танковых прицелов наводчика ПН  ), воздействуя на приводы вертикального и горизонтального наведения (как правило - наводчик), осуществляют ориентацию ДОКС IП на нее (фиг. 2).
), воздействуя на приводы вертикального и горизонтального наведения (как правило - наводчик), осуществляют ориентацию ДОКС IП на нее (фиг. 2).
Осуществляют визирование через оптическую трубку (как правило командир), при этом подают речевые команды или жесты (наводчику) для точной ориентации вооружения на выбранную удаленную точку путем совмещения перекрестия оптической трубки с данной точкой.
Если ЦПМ выверяемого прицела смотрит точно в туже точку (находящуюся на расстоянии от среза канала ствола  , соответствующей дальности выверки данного прицела
, соответствующей дальности выверки данного прицела  ), что и оптическая трубка, то прицел в выверке не нуждается.
), что и оптическая трубка, то прицел в выверке не нуждается.
Если присутствует рассогласование, то с помощью выверочного ключа, воздействуя на механизмы прицела, выводят его ЦПМ на выбранную удаленную точку.
Если выверка осуществляется в условиях ограниченной видимости, когда нет возможности использовать удаленную точку, то во время выверки используют предварительно изготовленную оригинальную по исполнению для каждой модели бронетанкового вооружения КВМ. При этом размещают КВМ на определенной дистанции от канала ствола вооружения  (в этом случае как правило
(в этом случае как правило  в зависимости от марки прицела и выверяемого вооружения). Выполняют все те же действия, как и при выверке по удаленной точке, но с той особенностью, что линии визирования прицелов и ДОКС наводятся не на одну точку, а строго на свои маркеры КВМ (фиг. 3).
в зависимости от марки прицела и выверяемого вооружения). Выполняют все те же действия, как и при выверке по удаленной точке, но с той особенностью, что линии визирования прицелов и ДОКС наводятся не на одну точку, а строго на свои маркеры КВМ (фиг. 3).
Очевидными недостатками аналога являются следующие:
привлечение для проведения выверки по крайней мере двух заранее обученных порядку проведения выверки членов экипажа;
все мероприятия выполняются человеком, требуют определенных навыков и квалификации, команды подаются голосом или жестами, в связи с чем достаточно велики временные затраты на проведение выверки, а также имеет место влияние на точность результата субъективных ошибок привлекаемых специалистов;
необходимость предварительного создания условий проведения выверки, заключающегося в поиске удаленной точки на местности, находящейся четко на заданной для данного прицела дальности или установки КВМ на определенной дистанции;
выверки всех прицелов образца вооружения, только частично могут допускать параллельное проведение операций.
Все это затрудняет проведение выверки нулевой линии прицеливания на привалах, коротких остановках и т.д.
В качестве прототипа выбран способ выверки нулевой линии прицела танка [Патент RU 2231731 C1, F41G 3/32, 2003 г.], включающий наведение ДОКС пушки на КВМ или удаленную точку и визирование этого положения через зрительную трубку с последующей регулировкой положения оси прицела винтами выверки, отличающийся тем, что зрительную трубку постоянно и жестко закрепляют на дульной части пушки и ось которой предварительно, при монтаже пушки в танк, согласуют с ДОКС пушки, при этом изображение ДОКС через оптоволоконный кабель и призму подают в прицел с возможностью включения и выключения выверки поворотом призмы.
Данный способ позволяет существенно сократить время на проведение выверки. Выверка может проводится одним членом экипажа, без использования дополнительного специального оборудования. Повышается точность выверки без всяких предварительных настроек и регулировок.
Однако, как и в аналоге все мероприятия при проведении выверки выполняет человек, соответственно время и точность выверки будет определяться его навыками и субъективными ошибками. Также не устранена необходимость предварительного создания условий проведения выверки, заключающаяся в выборе удаленной точки и установке КВМ на требуемых дистанциях.
Таким образом, задачами, на решение которых направлено заявляемое изобретение, являются:
во-первых, исключение из процесса выверки прицелов операций, выполняемых «вручную» привлекаемыми специалистами по пространственной ориентации ДОКС пушки и ЦПМ;
во-вторых, исключения из процесса выверки требований по соблюдению определенной дистанции до удаленной точки и КВМ;
в-третьих, одновременность проведения выверки для всех прицелов образца вооружения.
Решение первой задачи обеспечивается за счет автоматизации процесса выверки, при которой после команды оператора (члена экипажа боевой машины) на проведение выверки все действия по наведению ДОКС вооружения (пушки), расчету поправок на положение ЦПМ выверяемых прицелов и перемещению ЦПМ на расчетные положения реализуются в обрабатывающей системе без участия человека.
Решение второй задачи обеспечивается вычислением векторов поправок  для выверяемых прицелов согласно выражений:
для выверяемых прицелов согласно выражений:


где  - первые координаты,
- первые координаты,  - вторые координаты векторов поправок
- вторые координаты векторов поправок  ;
;
 - горизонтальные и вертикальные базы прицелов относительно выверяемого вооружения, берутся как кратчайшие расстояние в горизонтальной и вертикальной плоскостях между IП и соответствующими оптическими осями Ij, объективов прицелов (Фиг. 4…6);
- горизонтальные и вертикальные базы прицелов относительно выверяемого вооружения, берутся как кратчайшие расстояние в горизонтальной и вертикальной плоскостях между IП и соответствующими оптическими осями Ij, объективов прицелов (Фиг. 4…6);
 - первые координаты,
- первые координаты, - вторые координаты векторов начального (на момент осуществления выверки) положения ЦПМ
- вторые координаты векторов начального (на момент осуществления выверки) положения ЦПМ  ;
;
 - расстояние от среза канала ствола вооружения (пушки) до объекта Р или КВМ, по которым осуществляется выверка (Фиг. 4…6);
- расстояние от среза канала ствола вооружения (пушки) до объекта Р или КВМ, по которым осуществляется выверка (Фиг. 4…6);
 - расчетные (требуемые заводскими инструкциями) дальности выверки для каждого из j-ых прицелов (Фиг. 4…6);
- расчетные (требуемые заводскими инструкциями) дальности выверки для каждого из j-ых прицелов (Фиг. 4…6);
 - конструктивные расстояния (в продольной плоскости параллельно ДОКС вооружения (пушки)) от среза канала ствола вооружения (пушки) до оптических центров объектива Oj камеры j-го прицела, если он имеет модульную
- конструктивные расстояния (в продольной плоскости параллельно ДОКС вооружения (пушки)) от среза канала ствола вооружения (пушки) до оптических центров объектива Oj камеры j-го прицела, если он имеет модульную
конструкцию, и до геометрического центра его ГЗ, если он имеет перископическую конструкцию (Фиг. 4…6).
Суть данных поправок заключается в том, что в независимости от того на каком расстоянии  от боевой машины расположен объект Р, по которому проводится выверка (фиг. 2…3), ЦПМ j-го выверяемого прицела будет перемещена в такое (расчетное) положение (точка sj) в поле зрения прицела, в которое бы нужно было переместить ЦПМ при выверке по объекту Sj, точно расположенному на установленной требованиями (заводом) дальности
от боевой машины расположен объект Р, по которому проводится выверка (фиг. 2…3), ЦПМ j-го выверяемого прицела будет перемещена в такое (расчетное) положение (точка sj) в поле зрения прицела, в которое бы нужно было переместить ЦПМ при выверке по объекту Sj, точно расположенному на установленной требованиями (заводом) дальности  .
.
Решение третьей задачи реализуется за счет приема с камер всех выверяемых прицелов и камеры пушки цифровых изображений и одновременной их обработкой с вычислением для всех j-ых прицелов векторов поправок  .
.
Основным техническим результатом, обеспечиваемым приведенной совокупностью признаков, является:
повышение точности выверки прицелов, уменьшение затрачиваемого времени и устранение возможности влияния на процесс выверки субъективных ошибок, свойственных человеку;
обеспечение возможности проведения выверки по любой удаленной точке и по произвольно расположенной КВМ;
существенное сокращение суммарного времени на выверку всех прицелов образца вооружения.
В качестве дополнительных результатов можно указать снижение требований к уровню квалификации специалистов, привлекаемых для осуществления выверки, а также упрощение исполненияя КВМ.
Для осуществления заявленного способа в качестве задающего элемента, определяющего положение ДОКС вооружения, используют цифровую видеокамеру КП (Фиг. 4…6), выполненную с возможностью захвата и передачи в обрабатывающую систему цифровых изображений ImgП окружающей местности, через кабели (например, кабели универсальной последовательной шины USB) или по беспроводной связи (например, Wi-Fi).
Боевую машину предварительно рекомендуется разместить на ровной площадке по возможности с минимальными углами наклона.
Камеру КП устанавливают неподвижно на дульном срезе канала ствола на его внешней или внутренней стороне с помощью устройства крепления камеры (УКК) с таким исполнением, чтобы ДОКС и оптическую ось объектива камеры КП были параллельными, а оптический центр ее объектива находился на уровне среза канала ствола вооружения (пушки) (Фиг. 4…6). При чем камера КП может быть выполненной и в стационарном исполнении, т.е. быть постоянно закрепленной на срезе канала ствола (с внешней стороны) вооружения (пушки), если ее конструкция будет обеспечивать функционирование при высоких динамических и температурных нагрузках во время осуществления стрельбы. Возможен вариант крепления на срезе канала ствола вооружения (пушки) оптической трубки, выполненной с возможностью передачи изображения в камеру КП (находящуюся в месте, менее подвергаемом динамическим и температурным нагрузкам) через оптоволоконный кабель. Также возможен вариант размещения камеры КП на люльке вооружения (пушки), при обеспечении жесткой и точной соосности оптической оси камеры КП с ДОКС вооружения (пушки) при пересчете соответствующих величин. Камера КП может входить в комплект ЗИП. Кроме этого в качестве камеры КП может использоваться одна из камер внешнего видеонаблюдения образца бронетанкового вооружения. Камера КП может быть оптического или инфракрасного диапазонов. При этом рекомендуется, чтобы не осуществлять дополнительные преобразования с цифровыми изображениями, данную камеру использовать именно в таком исполнении, при котором диапазон ее работы будет совпадать с диапазоном выверяемых прицелов.
Предполагается два варианта осуществления автоматической выверки нулевых линий прицеливания оптико-электронных каналов прицелов образцов бронетанкового вооружения заявленным способом - по удаленной точке и по КВМ.
При коррекции по удаленной точке в качестве опорной точки Р принимается объект или участок местности, расположенные на некотором удалении  от оси канала ствола вооружения бронированной боевой машины, с учетом обеспечения визирования этой точки с камеры Kj и выверяемого прицела и возможности измерения дальности до нее любым доступным способом, в том числе и с помощью встроенного в прицел лазерного дальномера (ЛД) (Фиг. 4…6).
от оси канала ствола вооружения бронированной боевой машины, с учетом обеспечения визирования этой точки с камеры Kj и выверяемого прицела и возможности измерения дальности до нее любым доступным способом, в том числе и с помощью встроенного в прицел лазерного дальномера (ЛД) (Фиг. 4…6).
Коррекция по КВМ предпочтительна в заводских и парковых условиях, когда прямая видимость ограничена местностью или различными строениями, а минимальная дальность работы дальномера не позволяет найти расстояние до объекта Р.
КВМ представляет собой ровную поверхность (Фиг. 7), на которой на фиксированном расстоянии L друг от друга нанесены четко видимые маркеры в виде геометрических примитивов (например, на фиг. 7 на КВМ нанесено четыре квадрата). Связано это с достаточной простотой организации алгоритмов автоматического распознавания на изображении подобных форм, например, на основе алгоритмов математической морфологии. В любом случае и количество и форма маркеров могут иметь и другое число, и более сложные формы, а определяться это будет только требованиями по точности к результату измерений и ограничениями по производительности применяемых вычислительных ресурсов.
Обрабатывающая система, являющаяся, например, удаленным компьютером, таким как ноутбук или персональный компьютер (рабочая станция), должна обеспечивать выбор пользователем изображений и/или ввод команд обработки, прием изображений с камеры Кj, дальнейшую их автоматическую обработку с вычислением поправок на положение ЦПМ, и выработку соответствующих сигналов наведения для каналов вертикального и горизонтального наведения (ВН и ГН) стабилизатора вооружения (СВ) и сигналов управления для перемещения ЦПМ прицелов.
Обрабатывающая система может быть выполнена как отдельное (съемное) оборудование для выверки, а также может быть встроена в СУО или комплекс вооружения и являться, например, частью прицельно-наблюдательного комплекса системы управления огнем боевой машины.
Обрабатывающая система должна содержать исполняемые модули или команды с возможностью выполнения по меньшей мере одним процессором, память для хранения данных, пользовательский интерфейс, содержащий дисплей, такой как жидкокристаллический монитор, для просмотра видеоданных и устройство управления и ввода данных, такое как клавиатура или указательное устройство (например, манипулятор типа «мышь», шаровой указатель, стилус, сенсорная панель или другое устройство), для обеспечения взаимодействия пользователя (оператора) с видеоданными. В качестве дисплея также может выступать видео-смотровое устройство прицела образца бронетанкового вооружения.
Введение сигналов управления с обрабатывающей системы в приводы вертикального и горизонтального наведения СУО может быть реализовано путем подачи этих сигналов в блок управления стабилизатора вооружения или непосредственно в цепи пультов управления наводчика или командира в режиме дублирования.
Сущность изобретения поясняется чертежами, которые не охватывают и тем более не ограничивают весь объем притязаний данного изобретения, а являются лишь иллюстрирующими материалами частного случая выполнения, на которых:
на фиг. 1 отражена взаимная геометрическая связь между системой координат камеры, цифровым изображением, его элементами и объектом в пространстве;
на фиг. 2 отображена схема проведения выверки нулевых линий прицеливания оптико-электронных каналов прицелов образцов бронетанкового вооружения существующим способом по удаленной точке;
на фиг. 3 отображена схема проведения выверки нулевых линий прицеливания оптико-электронных каналов прицелов образцов бронетанкового вооружения существующим способом по КВМ;
на фиг. 4…6 отображена схема проведения выверки нулевых линий прицеливания оптико-электронных каналов прицелов образцов бронетанкового вооружения заявленным способом;
на фиг. 7 показан вариант выполнения КВМ;
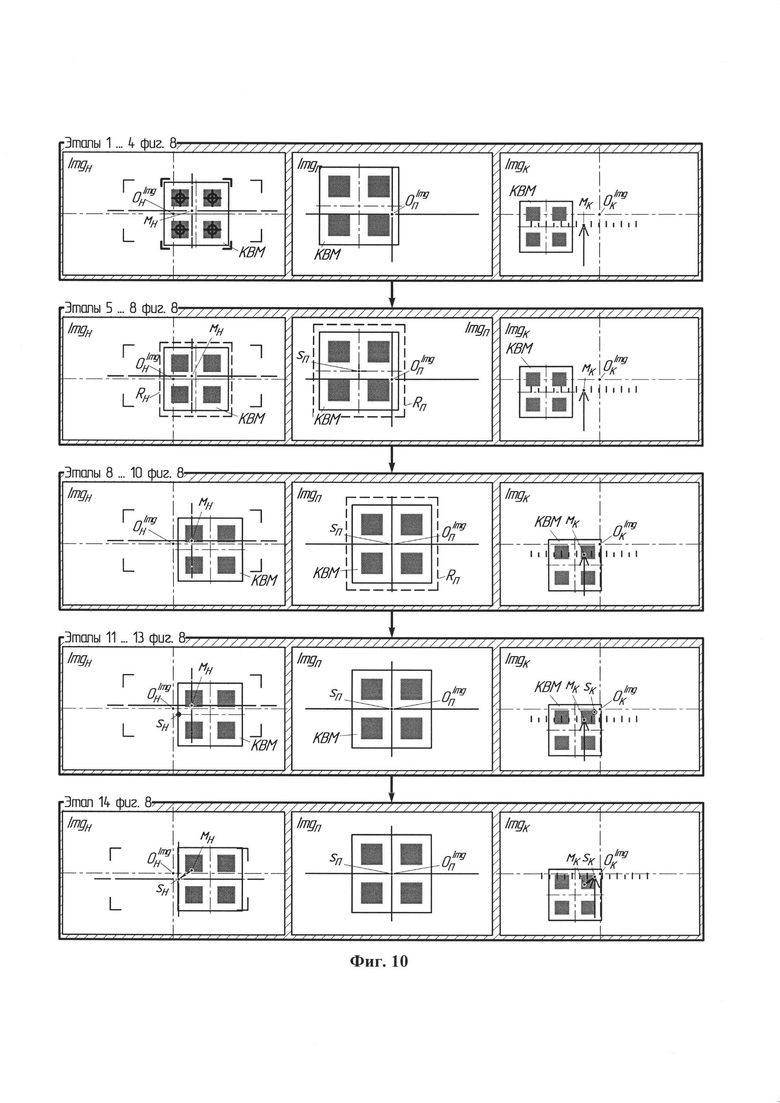
на фиг. 8 иллюстрируется порядок выполнения заявленного способа;
на фиг. 9 дополнительно иллюстрируется в качестве примера (представлены варианты полей зрения прицелов наводчика (слева), камеры пушки (в центре) и прицела командира (справа)) этапы порядка выполнения заявленного способа, представленные на фиг. 8, при выверке по удаленной точке;
на фиг. 10 дополнительно иллюстрируется в качестве примера (представлены варианты полей зрения прицелов наводчика (слева), камеры пушки (в центре) и прицела командира(справа)) этапы порядка выполнения заявленного способа, представленные на фиг. 8, при выверке по КВМ.
Осуществляют заявленный способ следующим образом.
Вычисляют матрицы внутренних параметров Kamj для j-ых камер (а именно, камеры пушки и камер (оптико-электронных частей) участвующих в выверке прицелов) (этап 1 фиг. 8)
Принимают с задействованных для проведения выверки j-ых камер, например, камер пушки, ПН и ПК, цифровые изображения Imgj (этап 2 фиг. 8).
В поле зрения одного из прицелов, в зависимости, кто из членов экипажа будет осуществлять выверку, в ручном, или автоматическом режиме с помощью встроенных алгоритмов, например, алгоритмов поиска особых точек, выбирают объект Р или участок местности, по которому будут осуществлять выверку.
Выбирают режим проведения выверки. При проведении выверки по удаленной точке измеряют дальность  (этап 3 фиг. 8) до объекта Р любым из доступных способов, например, с помощью, встроенного в прицел лазерного дальномера (ЛД) (этап 3.1 на фиг. 8).
(этап 3 фиг. 8) до объекта Р любым из доступных способов, например, с помощью, встроенного в прицел лазерного дальномера (ЛД) (этап 3.1 на фиг. 8).
В случае если в поле зрения нет объектов, находящихся в рабочей зоне штатного ЛД j-го прицела, то выбирают режим автоматической выверки по КВМ (этап 3.2 на фиг. 8).
При этом размещают КВМ перед боевой машиной на произвольном расстоянии с обеспечением ее одновременной видимости камерой пушки и камерами выверяемых прицелов;
рассчитывают расстояние  до КВМ относительно оптического центра объектива камеры Кj, например, путем:
до КВМ относительно оптического центра объектива камеры Кj, например, путем:
распознавания на изображении Imgj j-го прицела изображения маркеров;
формирования для каждого из распознанных на изображении Imgj маркеров векторов положений

где λ - порядковый номер маркера КВМ;
nλ, mλ - номера строк и столбцов центров изображений распознанных λ-ых маркеров на изображении Imgj;
вычисления для каждого из λ-ых маркеров векторов координат Аλ с применением матрицы Kj внутренних параметров j-го (применяемого для определения дальности) прицела

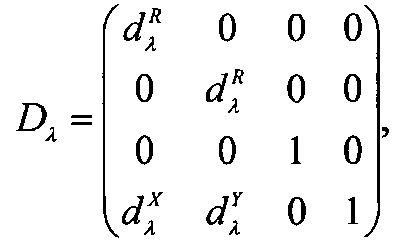
вычислении по результатам внутренней калибровки (или техническим данным камер) и значениям матриц Аλ для каждого λ-го маркера матрицы коррекции дисторсии Dλ

где  - величина коррекции радиальной дисторсии;
- величина коррекции радиальной дисторсии;
 - величина коррекции тангенциальной дисторсии в горизонтальной плоскости;
- величина коррекции тангенциальной дисторсии в горизонтальной плоскости;
 - величина коррекции тангенциальной дисторсии в вертикальной плоскости;
- величина коррекции тангенциальной дисторсии в вертикальной плоскости;
 - расстояние от центра изображения до корректируемого пикселя;
- расстояние от центра изображения до корректируемого пикселя;
k1, k2, k3 … ki - коэффициенты радиальной дисторсии (i - количество учитываемых коэффициентов);
р1, р2 - коэффициенты тангенциальной дисторсии,
при этом значения коэффициентов радиальной дисторсии k1, k2, k3 … ki, применяемых при нахождении  и значения коэффициентов тангенциальной дисторсии р1, р2, применяемых при нахождении
и значения коэффициентов тангенциальной дисторсии р1, р2, применяемых при нахождении  и
и  , задают из технических данных применяемых камер, или определяют в процессе внутренней их калибровки;
, задают из технических данных применяемых камер, или определяют в процессе внутренней их калибровки;
вычисления для каждого из λ-ых маркеров векторов скорректированных координат

где D - индекс, обозначающий скорректированные на величины дисторсии координаты изображений λ-ых маркеров изображении Imgj;
вычисления по закону центральной проекции с учетом значений расстояний L между центрами маркеров на КВМ расстояний  до каждой пары λ-го и λ+1-го маркеров,
до каждой пары λ-го и λ+1-го маркеров,

непосредственном вычислении величины  как среднеарифметического значения найденных значений
как среднеарифметического значения найденных значений  .
.
После измерения дальности  с j-го прицела рассчитывают расстояние
с j-го прицела рассчитывают расстояние  до объекта Р от среза выверяемого вооружения (пушки) по следующему выражению (этап 4 фиг. 8):
до объекта Р от среза выверяемого вооружения (пушки) по следующему выражению (этап 4 фиг. 8):

Считывают с изображений камер j-ых прицелов начальные положения (координаты) ЦПМ (за исключением камеры пушки), т.е. точек мj, в пиксельной системе координат, по которым записывают расширенные векторы начального положения ЦПМ (этап 5 фиг. 8)

где  - номера столбцов точек мj в горизонтальных плоскостях изображений Imgj, а
- номера столбцов точек мj в горизонтальных плоскостях изображений Imgj, а  - номера строк точек мj в вертикальных плоскостях изображений Imgj.
- номера строк точек мj в вертикальных плоскостях изображений Imgj.
Рассчитывают векторы координат точек мj на изображениях Imgj (за исключением камеры пушки) (этап 6 фиг. 8)

где  - координаты точек мj в горизонтальных плоскостях изображений Imgj, а
- координаты точек мj в горизонтальных плоскостях изображений Imgj, а  - координаты точек мj в вертикальных плоскостях изображений Imgj, найденные относительно оптических центров Oj объективов камер j-ых прицелов в их системах координат OjXjYjZj.
- координаты точек мj в вертикальных плоскостях изображений Imgj, найденные относительно оптических центров Oj объективов камер j-ых прицелов в их системах координат OjXjYjZj.
В автоматическом (или, как вариант, ручном режиме) вокруг изображения объекта Р на изображении Imgj прицела, с которого проводят выверку, формируют рамку захвата Rj (этап 7 фиг. 8) прямоугольной или произвольной формы. При этом кадрируют с изображения Imgj, с которого проводят выверку, охватываемый рамкой Rj участок, приводят его разрешение к разрешению изображения ImgП камеры пушки, например, путем интерполяции. С применением существующих алгоритмов осуществляют поиск изображений объекта Р на изображении камеры пушки. По завершению поиска вокруг найденных изображений объекта Р на изображении ImgП камеры пушки формируют соответствующую по размеру рамку захвата RП.
На изображении ImgП камеры пушки вычисляют координаты точки sП центра рамки RП относительно геометрического центра изображения  . Для точки sП записывают вектор положения (этап 8 фиг. 8)
. Для точки sП записывают вектор положения (этап 8 фиг. 8)

Далее для точки sП рассчитывают вектор координат (этап 9 фиг. 8)

Рассчитывают (этапы 9.1.1 и 9.2.1 фиг. 8) значения углов отклонения ДОКС пушки (вооружения), соответственно, αП в вертикальной и βП в горизонтальной плоскостях, от направления на объект Р


где ZП - расстояние от цапф вооружения (пушки) до его дульного среза;
ZБ - расстояние от дульного среза вооружения (пушки) до центра вращения башни образца бронетанкового вооружения.
За окончание наведения ДОКС пушки (вооружения) принимают момент, когда точка sП на изображении ImgП камеры пушки совпадет с центром изображения  , а ее первая и вторая координаты на изображении ImgП станут равны нулю (этапы 9.1 и 9.2 фиг. 8), т.е.
, а ее первая и вторая координаты на изображении ImgП станут равны нулю (этапы 9.1 и 9.2 фиг. 8), т.е.  . По завершению наведения останавливают приводы наведения.
. По завершению наведения останавливают приводы наведения.
Передают значения углов αП и βП (этапы 10.1 и 10.2 фиг. 8) для дальнейшего преобразования в сигналы наведения для приводов ВН и ГН СВ.
Рассчитывают первые и вторые координаты векторов поправок  для выверяемых прицелов согласно выражений (2) и (3) (этап 11 фиг. 8).
для выверяемых прицелов согласно выражений (2) и (3) (этап 11 фиг. 8).
Рассчитывают соответствующие установленным заводскими требованиями дальностям  выверки координаты ЦПМ на изображениях Imgj выверяемых прицелов (этап 12 фиг. 8)
выверки координаты ЦПМ на изображениях Imgj выверяемых прицелов (этап 12 фиг. 8)

где  - координаты расчетных положений ЦПМ (на фиг. 2 и 3 точки sj) на изображениях прицелов Imgj в системах координат их камер.
- координаты расчетных положений ЦПМ (на фиг. 2 и 3 точки sj) на изображениях прицелов Imgj в системах координат их камер.
Преобразуют значения (метрических трехмерных) координат векторов  в пиксельные (плоские) системы координат их изображений (этап 13 фиг. 8)
в пиксельные (плоские) системы координат их изображений (этап 13 фиг. 8)

где  и
и  - номера столбцов и строк на изображениях Imgj выверяемых прицелов, в которые должны быть перемещены ЦПМ.
- номера столбцов и строк на изображениях Imgj выверяемых прицелов, в которые должны быть перемещены ЦПМ.
Перемещают ЦПМ выверяемых прицелов на рассчитанные положения (согласно значений векторов ) (этап 14 фиг. 8). При чем, если ЦПМ формируются электронным способом, то ЦПМ перемещают также электронным способом. Если ЦПМ формируется на изображении прицела в его оптико-электронной части, и изменение положения ЦПМ в поле зрения прицела связано с механическим перемещением какого-то элемента, то перемещение ЦПМ должно быть осуществлено механическим способом, например, через сервоприводы, путем воздействия на соответствующий оптический элемент прицела.
) (этап 14 фиг. 8). При чем, если ЦПМ формируются электронным способом, то ЦПМ перемещают также электронным способом. Если ЦПМ формируется на изображении прицела в его оптико-электронной части, и изменение положения ЦПМ в поле зрения прицела связано с механическим перемещением какого-то элемента, то перемещение ЦПМ должно быть осуществлено механическим способом, например, через сервоприводы, путем воздействия на соответствующий оптический элемент прицела.
Реализация предлагаемого способа возможна при разработке новых и в ходе модернизации комплекса вооружения образцов бронетанкового вооружения и в целом повысит их боеготовность.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ текущей цифровой выверки прицелов с компенсацией положения прицельной марки на величину изгиба канала ствола | 2020 |
|
RU2725677C2 |
| СПОСОБ ВНУТРЕННЕГО ЦЕЛЕУКАЗАНИЯ С ИНДИКАЦИЕЙ ЦЕЛЕЙ ДЛЯ ОБРАЗЦОВ БРОНЕТАНКОВОГО ВООРУЖЕНИЯ | 2019 |
|
RU2712367C2 |
| СПОСОБ ВНЕШНЕГО ЦЕЛЕУКАЗАНИЯ С ИНДИКАЦИЕЙ ЦЕЛЕЙ ДЛЯ ОБРАЗЦОВ БРОНЕТАНКОВОГО ВООРУЖЕНИЯ | 2019 |
|
RU2697047C2 |
| Информационная обзорно-панорамная система наблюдения | 2020 |
|
RU2757061C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ КОРРЕКЦИИ ПАРАМЕТРОВ СТАБИЛИЗАТОРА ВООРУЖЕНИЯ | 2017 |
|
RU2667664C1 |
| Способ определения оси канала ствола для выверки прицелов и устройство для его осуществления | 2024 |
|
RU2836658C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТЕЙ ДО ОБЪЕКТОВ ПО ИЗОБРАЖЕНИЯМ С ЦИФРОВЫХ ВИДЕОКАМЕР | 2016 |
|
RU2626051C2 |
| Командирский прицельно-наблюдательный комплекс | 2015 |
|
RU2613767C2 |
| СПОСОБ ВЫВЕРКИ НУЛЕВОЙ ЛИНИИ ПРИЦЕЛА ТАНКА | 2003 |
|
RU2231731C1 |
| Способ выявления и компенсации ошибки прицеливания ствольного оружия | 2022 |
|
RU2787320C1 |


Изобретение относится к области бронетанкового вооружения и может быть использовано для автоматизации выверки нулевых линий прицеливания прицелов образцов бронетанкового вооружения с вооружением на танках, боевых машинах пехоты, артиллерийских системах и наземных роботизированных, в том числе автономных и дистанционно управляемых разведывательно-ударных комплексах военного назначения. Для автоматической выверки нулевых линий прицеливания оптико-электронных каналов прицелов наводят действительную ось канала ствола вооружения на удаленную точку или контрольно-выверочную мишень - КВМ. Согласуют оси прицеливания прицелов с действительной осью канала ствола в точках, находящихся на дальностях выверки, задаваемых исходя из дальности эффективной стрельбы для каждого прицела отдельно. При этом для определения направления действительной оси канала ствола используют предварительно установленную неподвижно на дульном срезе или в казенной части канала ствола цифровую видеокамеру с таким исполнением, чтобы действительная ось канала ствола и оптическая ось объектива камеры были параллельными, а оптический центр ее объектива находился на уровне среза канала ствола пушки. По техническим данным камеры пушки и оптико-электронных частей - камер выверяемых прицелов вычисляют матрицы их внутренних параметров. Принимают с задействованных для проведения выверки камер прицелов и пушки цифровые изображения. В поле зрения одного из прицелов с помощью встроенных алгоритмов выбирают объект (Р) или участок местности, по которому будут осуществлять выверку. Измеряют дальность до объекта (Р) штатным дальномером или выбирают режим автоматической выверки по КВМ. При этом на КВМ предварительно наносят на фиксированном расстоянии друг от друга четко видимые маркеры в виде геометрических примитивов на произвольном расстоянии перед боевой машиной с обеспечением ее одновременной видимости камерой пушки и камерами выверяемых прицелов. Рассчитывают расстояние до КВМ относительно оптического центра объектива камеры. Формируют для каждого из распознанных на изображении маркера вектор его положения и скорректированные координаты. Считывают с изображений камер прицелов начальные координаты центральных прицельных марок (за исключением камеры пушки) в пиксельной системе координат, по которым записывают расширенные векторы начального положения центральных прицельных марок. Кадрируют изображение, с которого проводят выверку охватываемого рамкой участка. Приводят его разрешение к разрешению изображения камеры пушки. Осуществляют поиск изображений объекта (Р) на изображении камеры пушки и по завершении поиска вокруг найденных изображений объекта (Р) на изображении камеры пушки формируют соответствующую по размеру рамку захвата (RП.) на изображении камеры пушки, вычисляют координаты точки (sП) центра рамки (RП) относительно геометрического центра изображения ( ). Для точки (sП) записывают вектор положения, рассчитывают вектор координат, рассчитывают значения углов отклонения действительной оси канала ствола вооружения, в вертикальной и в горизонтальной плоскостях, от направления на объект (Р). За окончание наведения пушки принимают момент, когда точка (sП) на изображении камеры пушки совпадет с центром изображения (), а ее первая и вторая координаты на изображении станут равны нулю. По завершении наведения останавливают приводы наведения и передают значения углов для дальнейшего преобразования в сигналы наведения для приводов вертикального и горизонтального наведения стабилизатора вооружения боевой машины. Рассчитывают первые и вторые координаты векторов поправок для выверяемых прицелов. Рассчитывают соответствующие заводским требованиям по дальностям выверки координаты центральных прицельных марок на изображениях выверяемых прицелов. Перемещают центральные прицельные марки выверяемых прицелов на рассчитанные положения. Обеспечивается повышение точности выверки прицелов, уменьшение затрачиваемого времени и устранение возможности влияния на процесс выверки субъективных ошибок, свойственных человеку, реализуется возможность проведения выверки по любой удаленной точке и по произвольно расположенной КВМ. 10 ил.
). Для точки (sП) записывают вектор положения, рассчитывают вектор координат, рассчитывают значения углов отклонения действительной оси канала ствола вооружения, в вертикальной и в горизонтальной плоскостях, от направления на объект (Р). За окончание наведения пушки принимают момент, когда точка (sП) на изображении камеры пушки совпадет с центром изображения (), а ее первая и вторая координаты на изображении станут равны нулю. По завершении наведения останавливают приводы наведения и передают значения углов для дальнейшего преобразования в сигналы наведения для приводов вертикального и горизонтального наведения стабилизатора вооружения боевой машины. Рассчитывают первые и вторые координаты векторов поправок для выверяемых прицелов. Рассчитывают соответствующие заводским требованиям по дальностям выверки координаты центральных прицельных марок на изображениях выверяемых прицелов. Перемещают центральные прицельные марки выверяемых прицелов на рассчитанные положения. Обеспечивается повышение точности выверки прицелов, уменьшение затрачиваемого времени и устранение возможности влияния на процесс выверки субъективных ошибок, свойственных человеку, реализуется возможность проведения выверки по любой удаленной точке и по произвольно расположенной КВМ. 10 ил.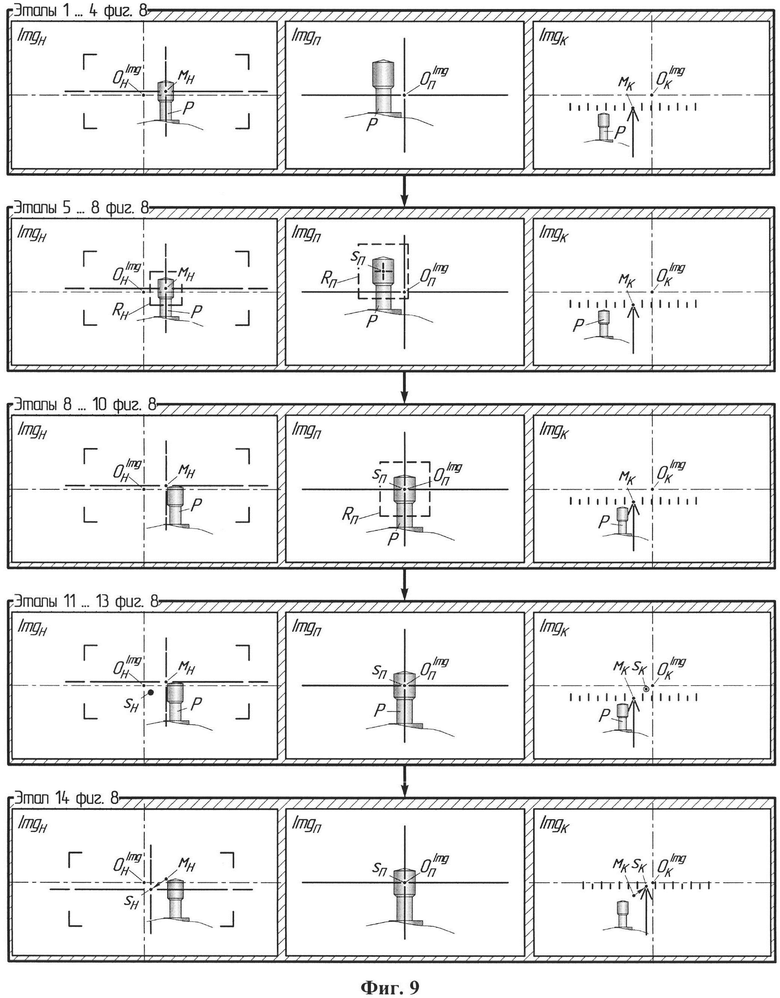
Способ автоматической выверки нулевых линий прицеливания оптико-электронных каналов прицелов бронетанкового вооружения, заключающийся в наведении действительной оси канала ствола вооружения - пушки образца бронетанкового вооружения на удаленную точку или контрольно-выверочную мишень с последующим согласованием осей прицеливания прицелов с действительной осью канала ствола в точках, находящихся на дальностях выверки, задаваемых исходя из дальности эффективной стрельбы для каждого прицела отдельно, отличающийся тем, что для определения направления действительной оси канала ствола вооружения - пушки используют предварительно установленную или стационарно размещенную неподвижно на дульном срезе или в казенной части вооружения - канала ствола пушки на его внешней или внутренней стороне цифровую видеокамеру - камеру пушки с таким исполнением, чтобы действительная ось канала ствола и оптическая ось объектива камеры были параллельными, а оптический центр ее объектива находился на уровне среза канала ствола вооружения - пушки,
по техническим данным камеры пушки и оптико-электронных частей - камер выверяемых j-х прицелов вычисляют матрицы внутренних параметров Kamj

где j - индекс, указывающий на принадлежность к соответствующим камерам, например j=К для прицела командира, j=Н для прицела наводчика или j=КН для прицела-дублера наводчика, j=П для камеры пушки и т.д.;
ƒj - величины фокусных расстояний объективов камеры пушки и камер прицелов, задаваемые из технических данных их объективов или определяемые в процессе их внутренних калибровок, причем если какой-либо из прицелов имеет перископическую конструкцию, то величину ƒj задают равной сумме величины глубины размещения hj камеры в прицеле относительно центра отражающей плоскости головного зеркала - призмы и расстояния ƒ'j от центра отражающей плоскости головного зеркала - призмы до формируемого камерой данного j-го прицела цифрового изображения Imgj, т.е.
ƒj=hj+ƒ'j;
 и
и  - физические размеры фотоячеек - пикселей фотоприемных устройств высокого разрешения соответственно в горизонтальной и вертикальной плоскостях камеры пушки j=П и камер j-х прицелов, при этом значения
- физические размеры фотоячеек - пикселей фотоприемных устройств высокого разрешения соответственно в горизонтальной и вертикальной плоскостях камеры пушки j=П и камер j-х прицелов, при этом значения  и
и  задают из технических данных фотоприемных устройств применяемых камер или определяют в процессе их внутренних калибровок;
задают из технических данных фотоприемных устройств применяемых камер или определяют в процессе их внутренних калибровок;
 - это расстояния соответственно в горизонтальной и вертикальной плоскостях между геометрическими центрами фотоприемных устройств и центрами изображений Imgj, формируемых объективами камеры Кj, при этом значения
- это расстояния соответственно в горизонтальной и вертикальной плоскостях между геометрическими центрами фотоприемных устройств и центрами изображений Imgj, формируемых объективами камеры Кj, при этом значения  и
и  задают из технических данных камер или определяют в процессе ее внутренней калибровки;
задают из технических данных камер или определяют в процессе ее внутренней калибровки;
Nj, Mj - количество столбцов и строк фотоприемных устройств высокого разрешения j-х камер, при этом значения Nj и Mj задают из технических данных используемых фотоприемных устройств или определяют в результате внутренней калибровки j-х камер,
принимают с задействованных для проведения выверки камер j-х прицелов и камеры пушки j=П цифровые изображения Imgj,
в поле зрения одного из прицелов, в зависимости, кто из членов экипажа будет осуществлять выверку, в ручном или автоматическом режиме с помощью встроенных алгоритмов, например алгоритмов поиска особых точек, выбирают объект Р или участок местности, по которому будут осуществлять выверку,
выбирают режим проведения выверки, при этом если выверку проводят по удаленной точке, то дальность  до объекта Р с j-го прицела могут измерять любым из доступных способов, например с помощью встроенного в прицел штатного, например лазерного дальномера, если же в поле зрения прицела нет объектов, находящихся в рабочей зоне дальномера j-го прицела, то выбирают режим автоматической выверки по КВМ,
до объекта Р с j-го прицела могут измерять любым из доступных способов, например с помощью встроенного в прицел штатного, например лазерного дальномера, если же в поле зрения прицела нет объектов, находящихся в рабочей зоне дальномера j-го прицела, то выбирают режим автоматической выверки по КВМ,
при этом размещают контрольно-выверочную мишень, на которую предварительно наносят на фиксированном расстоянии L друг от друга четко видимые маркеры в виде геометрических примитивов, перед боевой машиной на произвольном расстоянии с обеспечением ее одновременной видимости камерой пушки и камерами выверяемых прицелов и рассчитывают расстояние  до контрольно-выверочной мишени относительно оптического центра объектива камеры Кj, например, путем:
до контрольно-выверочной мишени относительно оптического центра объектива камеры Кj, например, путем:
распознавания на изображении Imgj j-го прицела изображения маркеров;
формирования для каждого из распознанных на изображении Imgj маркеров векторов положений

где λ - порядковый номер маркера КВМ;
nλ, mλ - номера строк и столбцов центров изображений распознанных λ-х маркеров на изображении Imgj;
вычисления для каждого из λ-х маркеров векторов координат Аλ с применением матрицы Kj внутренних параметров j-го, применяемого для определения дальности прицела

вычисления по результатам внутренней калибровки или техническим данным камер и значениям матриц Аλ для каждого λ-го маркера матрицы коррекции дисторсии Dλ
где  - величина коррекции радиальной дисторсии;
- величина коррекции радиальной дисторсии;
 - величина коррекции тангенциальной дисторсии в горизонтальной плоскости;
- величина коррекции тангенциальной дисторсии в горизонтальной плоскости;
 - величина коррекции тангенциальной дисторсии в вертикальной плоскости;
- величина коррекции тангенциальной дисторсии в вертикальной плоскости;
 - расстояние от центра изображения до корректируемого пикселя;
- расстояние от центра изображения до корректируемого пикселя;
k1, k2, k3 … ki - коэффициенты радиальной дисторсии, i - количество учитываемых коэффициентов;
p1, p2 - коэффициенты тангенциальной дисторсии,
при этом значения коэффициентов радиальной дисторсии k1, k2, k3 … ki, применяемых при нахождении  и значения коэффициентов тангенциальной дисторсии р1, р2, применяемых при нахождении
и значения коэффициентов тангенциальной дисторсии р1, р2, применяемых при нахождении  и
и  , задают из технических данных применяемых камер или определяют в процессе внутренней их калибровки;
, задают из технических данных применяемых камер или определяют в процессе внутренней их калибровки;
вычисления для каждого из λ-х маркеров векторов скорректированных координат

где D - индекс, обозначающий скорректированные на величины дисторсии координаты изображений λ-х маркеров на изображении Imgj;
вычисления по закону центральной проекции с учетом значений расстояний L между центрами маркеров на КВМ расстояний  до каждой пары λ-го и λ+1-го маркеров,
до каждой пары λ-го и λ+1-го маркеров,

непосредственного вычисления величины  как среднеарифметического значения найденных значений
как среднеарифметического значения найденных значений  ,
,
после измерения дальности  с j-го прицела рассчитывают расстояние
с j-го прицела рассчитывают расстояние  до объекта Р от среза выверяемого вооружения - пушки по следующему выражению:
до объекта Р от среза выверяемого вооружения - пушки по следующему выражению:
считывают с изображений камер j-х прицелов начальные положения - координаты центральных прицельных марок, за исключением камеры пушки, т.е. точек мj, в пиксельной системе координат, по которым записывают расширенные векторы начального положения центральных прицельных марок
где  - номера столбцов точек мj в горизонтальных плоскостях изображений Imgj, а
- номера столбцов точек мj в горизонтальных плоскостях изображений Imgj, а  - номера строк точек мj в вертикальных плоскостях изображений Imgj,
- номера строк точек мj в вертикальных плоскостях изображений Imgj,
рассчитывают векторы координат точек мj на изображениях Imgj, за исключением камеры пушки

где  - координаты точек мj в горизонтальных плоскостях изображений Imgj, а
- координаты точек мj в горизонтальных плоскостях изображений Imgj, а  - координаты точек мj в вертикальных плоскостях изображений Imgj, найденные относительно оптических центров Oj объективов камер j-х прицелов в их системах координат OjXjYjZj,
- координаты точек мj в вертикальных плоскостях изображений Imgj, найденные относительно оптических центров Oj объективов камер j-х прицелов в их системах координат OjXjYjZj,
вокруг изображения объекта Р на изображении Imgj прицела, с которого проводят выверку, формируют рамку захвата Rj прямоугольной или произвольной формы, при этом кадрируют с изображения Imgj, с которого проводят выверку, охватываемый рамкой Rj участок, приводят его разрешение к разрешению изображения ImgП камеры пушки, например, путем интерполяции, с применением существующих алгоритмов осуществляют поиск изображений объекта Р на изображении ImgП камеры пушки и по завершении поиска вокруг найденных изображений объекта Р на изображении ImgП камеры пушки формируют соответствующую по размеру рамку захвата RП,
на изображении ImgП камеры пушки вычисляют координаты точки sП центра рамки RП относительно геометрического центра изображения  , после чего для точки sП записывают вектор положения
, после чего для точки sП записывают вектор положения

далее для точки sП рассчитывают вектор координат

рассчитывают значения углов отклонения действительной оси канала ствола вооружения - пушки, соответственно αП в вертикальной и βП в горизонтальной плоскостях, от направления на объект Р


где ZП - расстояние от цапф вооружения - пушки до его дульного среза;
ZБ - расстояние от дульного среза вооружения - пушки до центра вращения башни образца бронетанкового вооружения,
при этом за окончание наведения пушки - вооружения принимают момент, когда точка sП на изображении ImgП камеры пушки совпадет с центром изображения  , а ее первая и вторая координаты на изображении ImgП станут равны нулю, т.е.
, а ее первая и вторая координаты на изображении ImgП станут равны нулю, т.е. 
по завершении наведения останавливают приводы наведения и передают значения углов αП и βП для дальнейшего преобразования в сигналы наведения для приводов вертикального и горизонтального наведения стабилизатора вооружения боевой машины, рассчитывают первые и вторые координаты векторов поправок
 для выверяемых прицелов согласно выражений
для выверяемых прицелов согласно выражений


где  - первые координаты,
- первые координаты,  - вторые координаты векторов поправок
- вторые координаты векторов поправок 
 - горизонтальные и вертикальные базы прицелов относительно выверяемого вооружения, берутся как кратчайшие расстояния в горизонтальной и вертикальной плоскостях между IП и соответствующими оптическими осями Ij, объективов прицелов - фиг. 4…6;
- горизонтальные и вертикальные базы прицелов относительно выверяемого вооружения, берутся как кратчайшие расстояния в горизонтальной и вертикальной плоскостях между IП и соответствующими оптическими осями Ij, объективов прицелов - фиг. 4…6;
 - первые координаты,
- первые координаты,  - вторые координаты векторов начального на момент осуществления выверки положения центральных прицельных марок
- вторые координаты векторов начального на момент осуществления выверки положения центральных прицельных марок  ;
;
 - расстояние от среза канала ствола вооружения - пушки до объекта Р или контрольно-выверочной мишени;
- расстояние от среза канала ствола вооружения - пушки до объекта Р или контрольно-выверочной мишени;
 - расчетные, требуемые заводскими инструкциями дальности выверки для каждого из j-х прицелов;
- расчетные, требуемые заводскими инструкциями дальности выверки для каждого из j-х прицелов;
 - конструктивные расстояния в продольной плоскости параллельно действительной оси канала ствола вооружения - пушки от среза канала ствола вооружения - пушки до оптических центров объектива Оj камеры j-го прицела, если он имеют модульную конструкцию, и до геометрического центра его головного зеркала, если он имеет перископическую конструкцию,
- конструктивные расстояния в продольной плоскости параллельно действительной оси канала ствола вооружения - пушки от среза канала ствола вооружения - пушки до оптических центров объектива Оj камеры j-го прицела, если он имеют модульную конструкцию, и до геометрического центра его головного зеркала, если он имеет перископическую конструкцию,
рассчитывают соответствующие заводским требованиям дальности  выверки координаты центральных прицельных марок на изображениях Imgj выверяемых прицелов
выверки координаты центральных прицельных марок на изображениях Imgj выверяемых прицелов

где  - координаты расчетных положений центральных прицельных марок - точки sj на изображениях прицелов Imgj в системах координат их камер,
- координаты расчетных положений центральных прицельных марок - точки sj на изображениях прицелов Imgj в системах координат их камер,
преобразуют значения метрических трехмерных координат векторов  в пиксельные - плоские системы координат их фотоприемных устройств
в пиксельные - плоские системы координат их фотоприемных устройств

где  и
и  - номера столбцов и строк на изображениях Imgj выверяемых прицелов, в которые должны быть перемещены центральные прицельные марки,
- номера столбцов и строк на изображениях Imgj выверяемых прицелов, в которые должны быть перемещены центральные прицельные марки,
перемещают центральные прицельные марки выверяемых прицелов на рассчитанные положения согласно значениям векторов  , причем если центральные прицельные марки формируются электронным способом, то их перемещают также электронным способом, если центральные прицельные марки формируется на изображении прицела в его оптико-электронной части и изменение их положения в поле зрения прицела связано с механическим перемещением какого-то элемента, то перемещение центральных прицельных марок осуществляют механическим способом, например через сервоприводы, путем воздействия на соответствующий оптический элемент прицела.
, причем если центральные прицельные марки формируются электронным способом, то их перемещают также электронным способом, если центральные прицельные марки формируется на изображении прицела в его оптико-электронной части и изменение их положения в поле зрения прицела связано с механическим перемещением какого-то элемента, то перемещение центральных прицельных марок осуществляют механическим способом, например через сервоприводы, путем воздействия на соответствующий оптический элемент прицела.
| СПОСОБ ВЫВЕРКИ НУЛЕВОЙ ЛИНИИ ПРИЦЕЛА ТАНКА | 2003 |
|
RU2231731C1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Расходомер | 1948 |
|
SU92324A1 |
| US 3588108 A, 28.06.1971. | |||

