Изобретение относится к области бронетанкового вооружения и может быть использовано для автоматизации процессов проведения внутреннего (от командира наводчику) целеуказания и индикации целей и важных объектов на танках, боевых машинах пехоты и десанта, бронетранспортерах, артиллерийских системах и т.п. Изобретение рассчитано прежде всего на современные образцы бронетанкового вооружения (ОБТВ) с системами управления огнем (СУО), оснащенными электронно-вычислительными машинами и прицелами с цифровыми оптико-электронными каналами.
Модернизация и разработка новых ОБТВ неминуемо связаны с появлением новых, более совершенных, развитых, высокоавтоматизированных СУО, эффективность которых определяется в том числе и тем, сколько времени тратится на разведку, обнаружение целей и подготовку выстрелов. В свою очередь время на данные этапы подготовки к огневому воздействию в значительной степени определяется применяемым способом целеуказания.
Различают способы внутреннего и внешнего целеуказания. Под способами внутреннего целеуказания (ВнЦУ) понимается процессы получения, обработки и передачи информации о целях и важных объектах в системе «обнаруживший-стреляющий», когда обнаруживший и стреляющий являются членами одного экипажа. Способы внешнего целеуказания наоборот характеризуются тем, что информация о целях и важных объектах поступает извне, от другого ОБТВ, например, командирской бронемашины (БМ), а также системы разведки, системы управления звеном и т.д., и т.п.
В настоящее время существующими способами ВнЦУ, применяемыми на ОБТВ, являются «ориентирный», «полуавтоматический» и «автоматический» способы.
Сущность «ориентирного» способа заключается в определении направления на цель или важный объект командиром для наводчика относительно корпуса БМ («Огневая подготовка мотострелковых подразделений» г. Москва, МО РФ, ГУ БП СВ; «Учебник сержанта ВДВ», кн. 2, стр. 515-525). При этом направление на цель или важный объект задают от хорошо заметных ориентиров на местности, по часам, а также от направления движения БМ (например, по азимутальному указателю) и т.п. Как правило для осуществления данного способа команды целеуказания передают голосом или по радиоканалу.
Недостатками «ориентирного» способа ВЦУ являются:
низкая пропускная способность в связи с подачей команд голосом;
зависимость временных затрат на прием целеуказания от обученности и выучки экипажа БМ;
необходимость после проведения ВнЦУ командиром БМ на каждую цель или важный объект осуществления их визуального поиска, обнаружения в поле зрения прицела наводчиком и наведения вооружения.
На сегодня практически на всех отечественных ОБТВ применяется «полуавтоматический» способ ВнЦУ (Автоматические системы управления вооружением: учебник /В.А. Галаган, В.П. Пивоваров, Г.А. Аппинг, С.А. Тишин, К.В. Кайков. - Омск: ОТИИ, 2008. с. 214-218), который выбран в качестве аналога к изобретению. Сущность данного способа заключается в наведении командиром БМ центральной прицельной марки (ЦПМ) своего прицела на цель и подачей сигнала на целеуказание, при этом командирская башенка (люк) стопорится на корпус танка, а на привод горизонтального наведения подается сигнал наведения. За окончание ВнЦУ принимается момент прекращения подачи командиром сигнала на целеуказание, или момент срабатывания датчика согласования, означающий, что башня танка развернулась в сторону цели до согласования линии визирования наводчика с направлением на цель, указанным командиром. После этого управление башней снова передается наводчику, а командир БМ может далее продолжать разведку поля боя.
Недостатки «полуавтоматического» способа ВнЦУ заключаются в следующем:
в данном способе не учтен параллакс между прицелами командира и наводчика, из-за чего наводчику необходимо в ручном режиме «донаводить» ЦПМ своего прицела на цель в горизонтальной плоскости;
целеуказание проводится только в горизонтальной плоскости, в вертикальной плоскости наводчик наводит ЦПМ на цель в ручном режиме;
при целеуказании данным способом предусмотрено стопорении командирской башенки (люка) на корпус БМ, что снижает точность целеуказания при малоскоростном маневрировании БМ, а при интенсивном маневрировании делает целеуказание вовсе невозможным.
В качестве прототипа выбран «автоматический» способ ВнЦУ. Данный способ основывается на применении автомата сопровождения целей (АСЦ). На сегодняшний день этот способ более известен в качестве реализация режима «охотник-стрелок» на современных ОБТВ (Патент RU 136148 U1, F41G 5/06, 2013 г.). Сущность его заключается в том, что после обнаружения и распознавания цели 10 командир наводит на нее ЦПМ 9 своего прицела 4 и подает команды на целеуказание и на захват цели в АСЦ. При этом на приводы башни 6 ОБТВ подается сигнал наведения, и она начинает вращаться в сторону командирского прицела 4. А сам командирский прицел 4 поворачивается относительно вращающейся башни 6 под действием сигналов с АСЦ, удерживая свою ЦПМ 9 на находящейся в рамке захвата 3 цели 10 (фиг. 1). По сигналу с датчика наведения, т.е. в момент согласования действующей оси канал ствола с направлением на цель 10, указанным командиром (фиг. 2), АСЦ переключается на прицел наводчика, продолжая ее автосопровождение (фиг. 3). Тем самым обеспечивается точное наведение ЦПМ 8 прицела наводчика на указанную цель 10 (фиг. 4). После чего целеуказание считается завершенным, командир БМ может далее проводить разведку поля боя.
Применение АСЦ в данном способе ВнЦУ позволило нивелировать практически все недостатки аналога, но вместе с тем:
- данный способ не может быть применен на ОБТВ, на которых не установлен АСЦ, а также при неисправном АСЦ или в случаях, когда АСЦ не может выполнять задачу по захвату цели и ее автоматическому сопровождению, например, из-за ее малой контрастности, ниже минимальной пороговой для надежного ее захвата;
- при поступлении командиру целеуказания в виде координат целей от другого ОБТВ, например, командирской БМ, системы разведки, системы управления звеном и т.д., и т.п., командир должен сначала осуществить визуальный поиск, обнаружение и распознавание этих целей, а только затем проводить ВнЦУ наводчику.
Таким образом заявленное изобретение направлено на решение следующих задач:
1. Обеспечение технической возможности реализации режима «автоматического» ВнЦУ на ОБТВ не имеющих в своем составе АСЦ.
Техническим результатом в данном случае является расширение перечня ОБТВ, на которых возможна реализация автоматического ВнЦУ.
2. Реализация режима «автоматического» ВнЦУ на ОБТВ, оснащенных АСЦ в случаях выхода АСЦ из строя, или при обнаружении целей или объектов, контраст которых (тепловой или визуальный) не позволяет их надежно захватывать на автосопровождение.
В этом случае техническим результатом является повышение надежности СУО ОБТВ в целом.
3. Обеспечение для командира ОБТВ возможности проведения целеуказания по целям, поступившим по каналу системы управления боем (в виде типов и координат целей во внешней системе координат) в автоматическом режиме без проведения командиром БМ их визуального поиска, обнаружения и распознавания.
Техническим результатом при выполнении данной задачи является сокращение времени для командира ОБТВ на проведение процедур приема цели (от другого ОБТВ, например, командирской БМ, системы разведки, системы управления боем и т.д., и т.п.) и передачи ее наводчику.
Решение данных задач определяется тем, что порядок передачи цели от командира наводчику реализуется за счет непосредственного вычисления положения цели на изображении наводчика по данным с прицела командира и датчиков ОБТВ. Данные вычисления основаны на описании текущего взаимного пространственного и углового положений оптико-электронных систем (ОЭС) прицелов командира и наводчика в системе координат ОБТВ в том числе и описания положения системы координат ОБТВ во внешней (мировой) системе координат.
Прицелы современных ОБТВ как правило имеют ОЭС, предназначенные для преобразования невидимого для человеческого глаза излучения в электрический сигнал, на основании которого затем формируется видимое для оператора изображение. На сегодняшний день в составе прицелов ОБТВ наиболее распространены тепловизионные ОЭС (тепловизоры), также активно применяются приборы ночного видения, телевизионные камеры и пр.
При этом независимо от спектрального диапазона, в котором работает прицел, любая его ОЭС имеет объектив, предназначенный для формирования резкого изображения и фотоприемное устройство (ФПУ) для преобразования излучения в электрический сигнал. В современном исполнении роль ФПУ как правило выполняют фото-матрицы, например, ПЗС, ПЗИ, болометрические и т.п. Это позволяет ОЭС любого прицела рассматривать как видеокамеру j-го прицела, где j - индекс, указывающий на принадлежность к соответствующему прицелу, например, j=ПК для прицела командира (ПК), j=ПН для прицела наводчика (ПН) или j=ПДН для прицела-дублера наводчика (ПДН) и т.п., в которой получаемое с нее цифровое изображение может быть отождествлено с реальным физическим изображением, сфокусированным ее объективом в задней фокальной плоскости на ФПУ.
Цифровые изображения, получаемые с камер прицелов, состоят из пикселей. Каждый пиксель характеризуется значением, которое состоит из полутонового значения или цветового значения. В полутоновых изображениях значение пикселя представляет собой одну величину, которая характеризует яркость пикселя. Наиболее общим форматом описания пикселя является байт изображения, в котором значение пикселя представлено восьмиразрядным целым числом, лежащим в диапазоне возможных значений от 0 до 255. Как правило, значение пикселя, равное нулю, используют для обозначения черного пикселя, а значение 255 используют для обозначения белого пикселя. Промежуточные значения описывают различные оттенки полутонов. В цветных изображениях для описания каждого пикселя (расположенного в цветовом пространстве размерности RGB - красный, зеленый, синий) должны быть отдельно определены красная, зеленая и синяя компоненты. Иными словами, значение пикселя фактически представляет собой вектор, описанный тремя числами. Три различные компоненты могут быть сохранены как три отдельных полутоновых изображения, известные как цветовые плоскости (по одной для красного, зеленого и синего цветов), которые можно воссоединять при отображении или при обработке.
Прицелы, применяемые на ОБТВ, как правило, применяются модульной или перископической конструкции.
В прицелах модульной конструкции камера располагается в надброневом пространстве БМ в головном блоке прицела. Изменение поля зрения, а также стабилизация в них реализуется за счет приводов самой камеры или всего блока целиком.
Классическая конструкция перископического прицела с ОЭС предполагает размещение камеры таким образом, чтобы оптическая ось ее объектива была направлена снизу-вверх на качающееся головное зеркало прицела. Головное зеркало располагается внутри головного блока прицела в надброневом пространстве. Камера располагается под углом (как правило 45°) к плоскости зеркала в заброневом пространстве образца вооружения.
СК 11 БМ 



Положение и ориентация СК 11 БМ 












Положение каждого прицела относительно ОБТВ описано соответствующими матрицами положения 
Под СК j-го прицела (Фиг. 6, Фиг. 7), понимается СК 
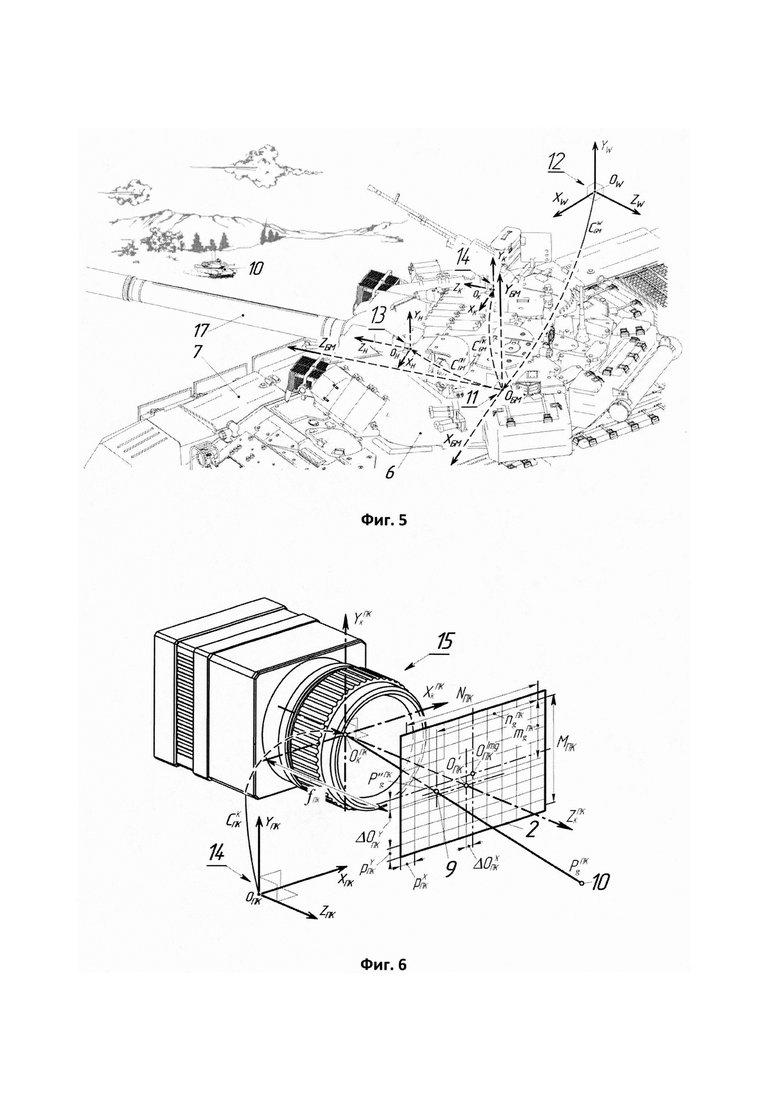
Например, на фиг. 5 СК ПК соответствует СК 14, а СК ПН - СК 13.
Для описания положения камеры в j-ом прицеле может применена матрица положения (эвклидово преобразование) 
где 

Под СК камеры понимается СК 




Размеры пикселей цифровых изображений (Фиг. 6, 7) принимают равными в соответственно в горизонтальной и вертикальной плоскостях физическим размерам 




В случае допущения погрешностей при производстве ОЭС прицела, при которых ФПУ может своим геометрическим центром не совпадать с оптической осью объектива камеры (Фиг. 2), различают следующие величины 





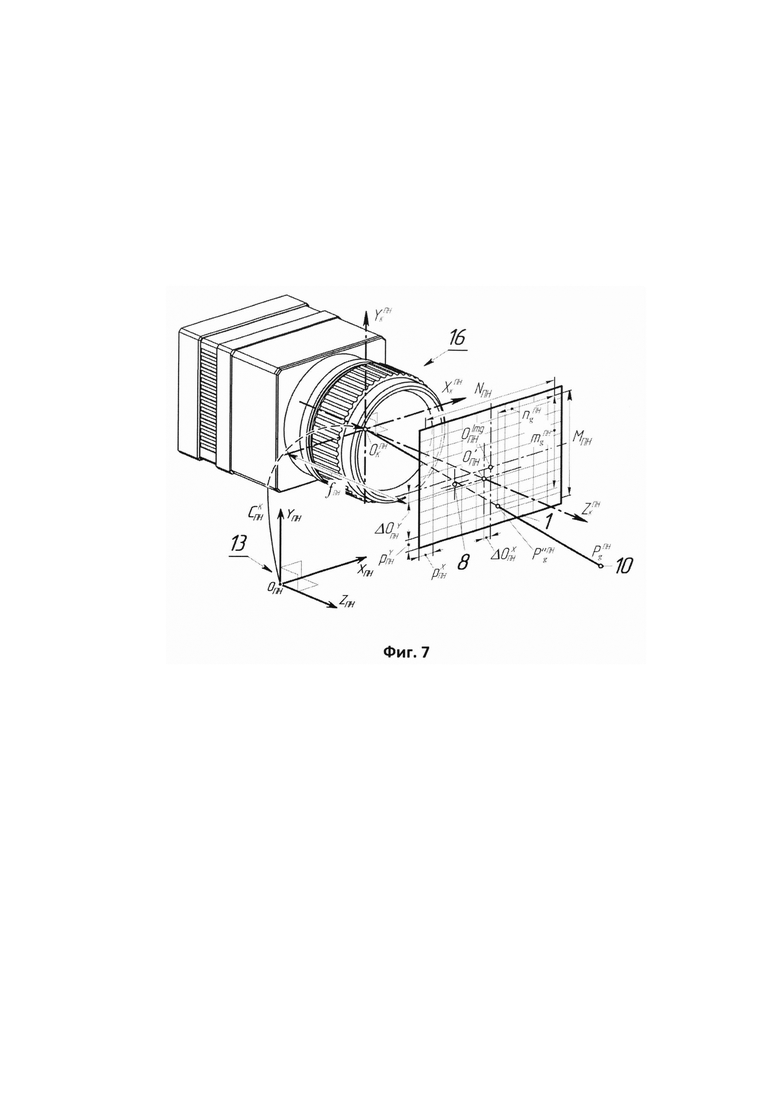
Например, на фиг. 6 и 7 СК камеры ПК соответствует СК 15, а СК камеры ПН - СК 16, в которых указанным порядком размещены изображение 1 ПН и изображение 2 ПК.
Если в поле зрения камеры j-го прицела находится объект 10 (Фиг. 6, 7), то на цифровых изображениях 1 и 2, соответственно, ПН и ПК изображению 


В целом значения
Обрабатывающая система, являющаяся, например, удаленным компьютером, таким как ноутбук или персональный компьютер (рабочая станция), должна обеспечивать выбор пользователем изображений и/или ввод команд обработки, прием изображений с камер (ОЭС) прицелов, дальнейшую их автоматическую обработку с вычислением положения графических маркеров в полях зрения прицелов, а также выработку соответствующих сигналов наведения для каналов вертикального и горизонтального наведения (ВН и ГН) стабилизатора вооружения и сигналов управления для наведения ЦПМ прицелов на цель. Кроме этого она должна обеспечивать прием и обработку сигналов с навигационной системы, датчиков углов прицелов, датчиков курса, крена, тангажа, и датчика ориентации, а также прием сигналов с информацией о координатах целей от приемно-передающею аппаратуру.
Обрабатывающая система может быть выполнена как отдельное (съемное) оборудование для ВнЦУ, а также может быть встроена в СУО или комплекс вооружения и являться, например, частью прицельно-наблюдательного комплекса СУО ОБТВ. Обрабатывающая система должна содержать исполняемые модули или команды с возможностью выполнения по меньшей мере одним процессором, память для хранения данных, пользовательский интерфейс, содержащий один несколько дисплеев, таких как жидкокристаллические мониторы для просмотра видеоданных и устройство управления и ввода данных, такое как клавиатура или указательное устройство (например, манипулятор типа «мышь», шаровой указатель, стилус, сенсорная панель или другое устройство), для обеспечения взаимодействия пользователя (оператора) с видеоданными. В качестве дисплеев также могут использоваться ВСУ прицела ОБТВ. Введение наведения управления с обрабатывающей системы в приводы ВН и ГН стабилизатора вооружения СУО может быть реализовано путем подачи этих сигналов в блок управления стабилизатора вооружения или непосредственно в цепи пультов управления наводчика или командира в режиме дублирования.
Сущность изобретения поясняется чертежами, которые не охватывают и тем более не ограничивают весь объем притязаний данного изобретения, а являются лишь иллюстрирующими материалами частного случая выполнения, на которых:
на фиг. 1, 2, 3, 4 иллюстрируются этапы выполнения «автоматического» способа ВнЦУ, выбранного в качестве прототипа;
на фиг. 5 иллюстрируется взаимосвязь и вариант размещения СК j-ых прицелов с СК БМ и внешней (мировой) СК, в которой определены координаты цели;
на фиг. 6 и 7 показано взаимное положение СК камер, соответственно, ПК и ПН относительно их оснований, показано размещение снимаемых с камер цифровых изображений, а также иллюстрируются взаимосвязи между положением объекта в СК камер и их цифровыми изображениями в пиксельных СК изображений.
Осуществляют заявленный способ следующим образом.
Принимают с камер (ОЭС) ПК и ПН цифровые изображения 2 и 1 (фиг. 6, 7).
Принимают с навигационной системы БМ данные, содержащие трехмерные координаты (


С датчика ориентации принимают данные (угол 
С датчиков курса, тангажа и крена БМ принимают данные, содержащие значения углов (соответственно, 

С датчиков прицелов принимают данные о действующих значениях фокусных расстояний fj объективов камер j-ых прицелов БМ, данных датчиков угла об ориентации головных блоков прицелов (если прицелы имеют модульную конструкцию) или рам головных зеркал (если прицелы имеют перископическую конструкцию) в горизонтальной плоскости 

Из памяти обрабатывающей системы принимают данные о внутренних параметрах камер прицелов, а именно значения горизонтальных и вертикальных разрешений фотоприемных устройств в горизонтальной Nj и вертикальной Mj плоскостях, расстояние между геометрическим центрами фотоприемных устройств и центрами изображений, формируемых объективами камер j-ых прицелов в горизонтальной 


На основе полученных данных вычисляют матрицы внутренних параметров камер прицелов

Кроме этого принимают из памяти обрабатывающей системы данные о положении ЦПМ 8 и 9 на изображениях 1 и 2, соответственно, ПН и ПК, согласно которых записывают векторы:

где 

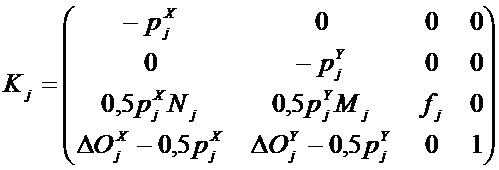
Для камер (ОЭС) j-ых прицелов рассчитывают матрицы положения 
Например, (фиг. 6, 7) для ПК вычисляется матрица 

В общем случае матрица положения 
содержит матрицу поворота 

При этом для вычисления всех коэффициентов матриц 


где 









Если прицел имеет перископическую конструкцию, предусматривающую неподвижное размещение камеры внутри прицела, и изменение ориентации поля зрения прицела за счет прокачки ГЗ в вертикальной и горизонтальной плоскостях на углы 


где 







Для каждого j-го прицела, для которого может быть проведено целеуказание, вычисляют матрицы 

где 







Например, (фиг. 5) для ПК вычисляется матрица 

Вычисляют матрицу 

где 







Например, (фиг. 5) для БМ вычисляется матрица 
После обнаружения g-ой цели или важного объекта 10 в прицеле, с которого ведется разведка и целеуказание, например, с ПК, наводят на нее ЦПМ 9 этого прицела, тем самым совмещая точку 


где 



Подают команду на проведение ВнЦУ на прицел наводчика-оператора, при этом измеряют дальность 
Вычисляют коэффициенты центральной проекции 
Записывают проекционную матрицу 

Вычисляют вектор координат g-й цели или важного объекта 10 в СК 15 камеры ПК

где 


Преобразуют координаты g-й цели (объекта) 10 из СК 15 камеры ПК в СК 11 БМ

При приеме целеуказания командиром БМ от внешнего источника (другой БМ подразделения, например, командирской, или системы управления звеном, системы или средства разведки) в виде трехмерных координат (



Преобразуют координаты g-й цели (объекта) из СК 12 в СК 11

Вычисляют углы на цель относительно действующего положения вооружения в вертикальной и горизонтальной плоскостях


где 


Вычисляют вектор 

Масштабируют координаты g-ой цели или важного объекта 10 из СК 16 камеры ПН в плоскость изображения 1 ПН, для чего:
рассчитывают коэффициент проекции sПН
составляют проекционную матрицу SПН
пересчитывают значения координат вектора 

Вычисляют пиксельные (плоские) координаты g-ой цели (объекта) 10 на изображении 1 ПН

где 


Для каждой g-ой цели или важного объекта отображают на изображениях прицелов соответствующий типу цели графический маркер, например, в форме рамки, выделяющей местоположение изображения цели в поле зрения прицела. При этом если пиксельные координаты g-ой цели или важного объекта выходят за границы изображений, т.е. 
Подают сигналы наведения на привод ГН стабилизатора вооружения до момента отработки углов 


После чего, ЦПМ 8 ПН оказывается наведенной на указанную командиром цель (объект) 10, процесс ВнЦУ считается завершенным.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВНЕШНЕГО ЦЕЛЕУКАЗАНИЯ С ИНДИКАЦИЕЙ ЦЕЛЕЙ ДЛЯ ОБРАЗЦОВ БРОНЕТАНКОВОГО ВООРУЖЕНИЯ | 2019 |
|
RU2697047C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ВЫВЕРКИ НУЛЕВЫХ ЛИНИЙ ПРИЦЕЛИВАНИЯ ОПТИКО-ЭЛЕКТРОННЫХ КАНАЛОВ ПРИЦЕЛОВ БРОНЕТАНКОВОГО ВООРУЖЕНИЯ | 2018 |
|
RU2695141C2 |
| Информационная обзорно-панорамная система наблюдения | 2020 |
|
RU2757061C1 |
| Способ текущей цифровой выверки прицелов с компенсацией положения прицельной марки на величину изгиба канала ствола | 2020 |
|
RU2725677C2 |
| Комплекс вооружения боевой машины с информационно-управляющей системой | 2016 |
|
RU2628027C1 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ | 2007 |
|
RU2351876C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ С ЗАКРЫТЫХ ПОЗИЦИЙ ПО НЕНАБЛЮДАЕМОЙ ЦЕЛИ И СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ ДЛЯ ЕЕ ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2444693C2 |
| СПОСОБ КОМПЛЕКСНОГО ПРИМЕНЕНИЯ ЗЕНИТНО-РАКЕТНОГО ВООРУЖЕНИЯ СО СРЕДСТВАМИ ВНЕШНЕГО ЦЕЛЕУКАЗАНИЯ | 2023 |
|
RU2830505C1 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ И СТАБИЛИЗАТОР ВООРУЖЕНИЯ | 2007 |
|
RU2360208C2 |
| Способ согласования оптических осей прицелов и оружия комплекса вооружения боевых машин и система для их осуществления | 2020 |
|
RU2739331C1 |

Изобретение относится к области бронетанкового вооружения и может быть использовано для автоматизации процессов проведения внутреннего от командира наводчику целеуказания и индикации целей и важных объектов на танках, боевых машинах пехоты и десанта, бронетранспортерах, артиллерийских системах и т.п. Обеспечивается техническая возможность реализации режима «автоматического» целеуказания от командира наводчику на образцах бронетанкового вооружения, не имеющих в своем составе автомата сопровождения целей, реализация режима «автоматического» целеуказания наводчику на образцах бронетанкового вооружения, оснащенных автоматом сопровождения целей в случаях выхода его из строя, или при обнаружении целей или объектов, контраст которых (тепловой или визуальный) не позволяет их надежно захватывать на автосопровождение, возможности проведения целеуказания наводчику по целям, поступившим по каналу системы управления боем в виде типов и координат целей во внешней системе координат в автоматическом режиме без проведения их визуального поиска, обнаружения и распознавания. 7 ил.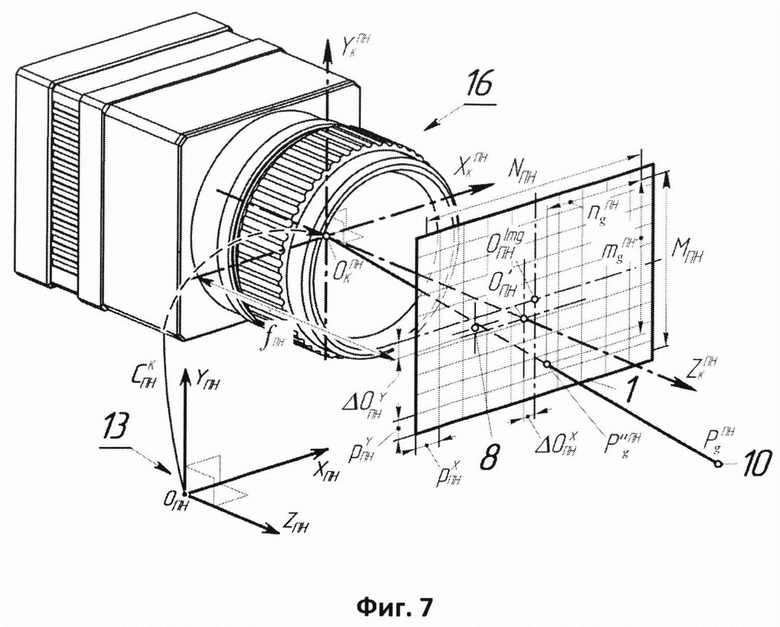
Способ внутреннего целеуказания с индикацией целей для образцов бронетанкового вооружения, заключающийся в наведении на цель или важный объект центральной прицельной марки - ЦПМ прицела командира - ПК, подаче сигналов наведения на приводы вертикального - ВН и горизонтального наведения - ГН для образца бронетанкового вооружения - ОБТВ до момента согласования ЦПМ прицела наводчика - ПН с указанной командиром бронемашины - БМ целью – объектом, отличающийся тем, что до проведения целеуказания от командира БМ наводчику-оператору принимают с камер - оптико-электронных систем ПК и ПН цифровые изображения, принимают с навигационной системы БМ данные, содержащие трехмерные координаты 












на основе полученных данных вычисляют матрицы внутренних параметров камер прицелов
кроме этого принимают из памяти обрабатывающей системы данные о положении ЦПМ на изображениях ПН и ПК, согласно которым записывают векторы:

где 

для каждой камеры оптико-электронной системы j-го прицела рассчитывают матрицу положения 


где q - количество промежуточных матриц, определяемое конструкцией прицела, а в каждую промежуточную матрицу 






где 








для перископической конструкции, предусматривающей неподвижное размещение камеры внутри прицела, и изменение ориентации поля зрения прицела за счет прокачки ГЗ в вертикальной и горизонтальной плоскостях на углы 

где 







для каждого j-го прицела, для которого может быть проведено целеуказание, вычисляют матрицу 

где 









вычисляют матрицу 
где 







при проведении внутреннего целеуказания после обнаружения g-й цели или важного объекта в прицеле, с которого ведется разведка и целеуказание, наводят на нее ЦПМ этого прицела, тем самым совмещая точку 


где 



подают команду на проведение целеуказания на прицел наводчика-оператора, при этом измеряют дальность 
вычисляют коэффициенты центральной проекции 

записывают проекционную матрицу 

вычисляют вектор координат g-й цели или важного объекта в СК камеры ПК

где 


преобразуют координаты g-й цели - объекта из СК камеры ПК в СК БМ

при приеме целеуказания командиром БМ от внешнего источника другой БМ подразделения, - командирской, или системы управления звеном, системы или средства разведки в виде трехмерных координат 



преобразуют координаты g-й цели - объекта из внешней - мировой СК в СК БМ

вычисляют углы на цель относительно действующего положения вооружения в вертикальной и горизонтальной плоскостях

где 


вычисляют вектор 

масштабируют координаты g-й цели или важного объекта из СК камеры ПН в плоскость изображения ПН, для чего:
рассчитывают коэффициент проекции sПН

составляют проекционную матрицу SПН
пересчитывают значения координат вектора 

вычисляют пиксельные - плоские координаты g-й цели - объекта на изображении ПН

где 


для каждой g-й цели или важного объекта отображают на изображениях прицелов соответствующий типу цели графический маркер, выделяющий местоположение изображения цели в поле зрения прицела, при этом если пиксельные координаты g-й цели или важного объекта выходят за границы изображений, т.е. 

подают сигналы наведения на привод ГН стабилизатора вооружения до момента отработки углов 


после чего процесс внутреннего целеуказания считают завершенным.
| Способ пассивации стальных и железных деталей перед нанесением гальванических покрытий | 1959 |
|
SU136148A1 |
| СПОСОБ УПРАВЛЕНИЯ ОГНЕМ БРОНЕТАНКОВОЙ ТЕХНИКИ | 2014 |
|
RU2603750C2 |
| КОМПЬЮТЕРНО-ТЕЛЕВИЗИОННАЯ СИСТЕМА УПРАВЛЕНИЯ СТРЕЛЬБОЙ | 2002 |
|
RU2226319C2 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| US 5686690 A, 11.11.1997. | |||

