ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится, в целом, к добыче углеводородов и/или текучих сред и, более конкретно, к способам и устройству для определения параметров насосной установки для использования в скважинах.
УРОВЕНЬ ТЕХНИКИ
[0002] Насосные установки используют для извлечения текучей среды (например, углеводородов) из скважины. Поскольку насосная установка работает циклически для извлечения текучей среды из скважины, к компонентам насосной установки прилагаются различные усилия. Из уровня техники известно, например, решение, раскрытое в источнике US 3029650, где описана конструкция механической насосной установки, предназначенной для выкачивания нефти. Кроме того, в источнике US 2014/0129037 описан способ, посредством которого можно определить положение кривошипа в системе насосно-штанговой установки без использования датчика положения кривошипа.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0003] Пример способа включает в себя определение первой нагрузки на полированный шток в насосной установке и оценку первого момента кручения двигателя насосной установки. Пример способа включает в себя определение первого коэффициента момента для насосной установки, при этом первый коэффициент момента включает в себя скорость изменения положения полированного штока относительно угла плеча кривошипа насосной установки. Пример способа включает в себя определение угла сдвига фаз противовеса в насосной установке или момента противовеса на основании первой нагрузки, первого момента кручения и первого коэффициента момента.
[0004] Пример способа включает в себя определение первого коэффициента момента насосной установки с помощью определения корреляции между значениями числа импульсов двигателя, используя первый датчик, и положением полированного штока, используя второй датчик. Коэффициент момента включает в себя скорость изменения положения полированного штока насосной установки относительно угла плеча кривошипа насосной установки.
[0005] Пример устройства содержит корпус и процессор, установленный в корпусе. Процессор выполнен с возможностью определения первой нагрузки на полированный шток насосной установки, для оценки первого момента кручения двигателя насосной установки и определения первого коэффициента момента для насосной установки. Процессор выполнен с возможностью определения угла сдвига фаз противовеса насосной установки или момента противовеса на основании первой нагрузки, первого момента кручения и первого коэффициента момента.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
[0006] Фиг. 1 представляет пример насосной установки для использования в скважине, в которой могут быть реализованы примеры, раскрытые в настоящем документе.
[0007] Фиг. 2 представляет другой пример насосной установки для использования в скважине, в которой могут быть реализованы примеры, раскрытые в настоящем документе.
[0008] Фиг. 3 представляет другой пример насосной установки для использования в скважине, в которой могут быть реализованы примеры, раскрытые в настоящем документе.
[0009] Фиг. 4А и 4В представляют пример справочной таблицы, созданной в процессе примерного процесса калибровки в соответствии с принципами настоящего изобретения.
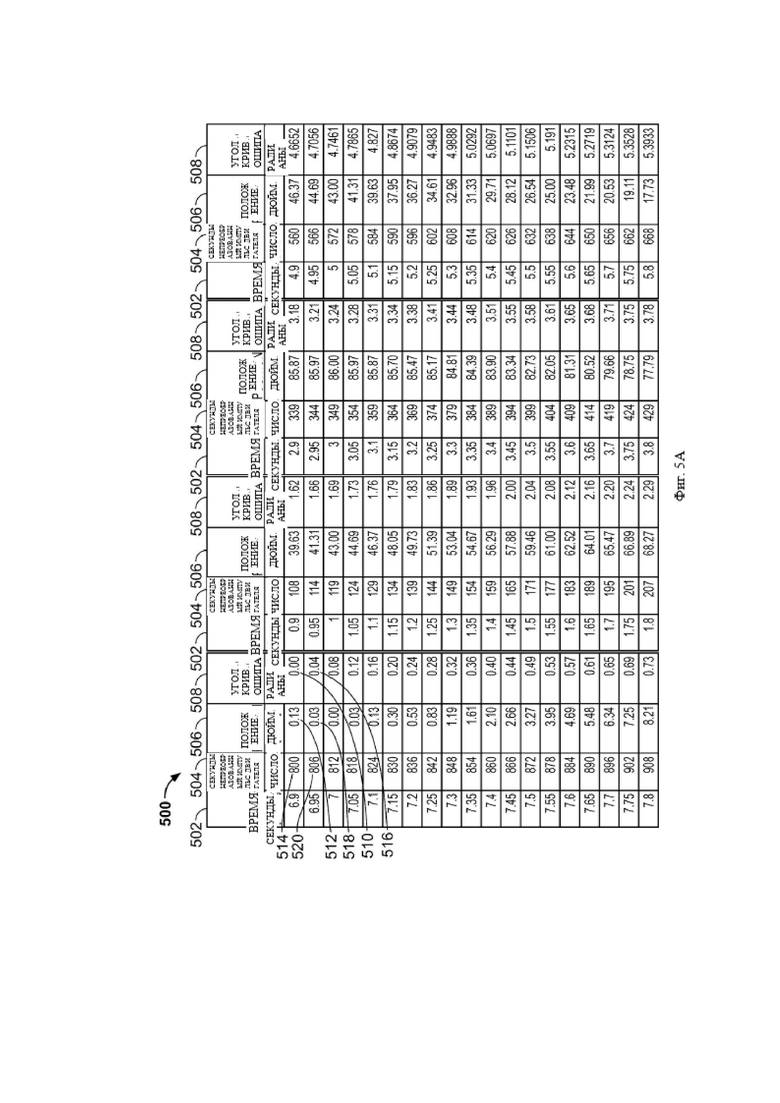
[0010] Фиг. 5А и 5В представляют другой пример справочной таблицы, созданной с использованием раскрытых в настоящем документе примеров.
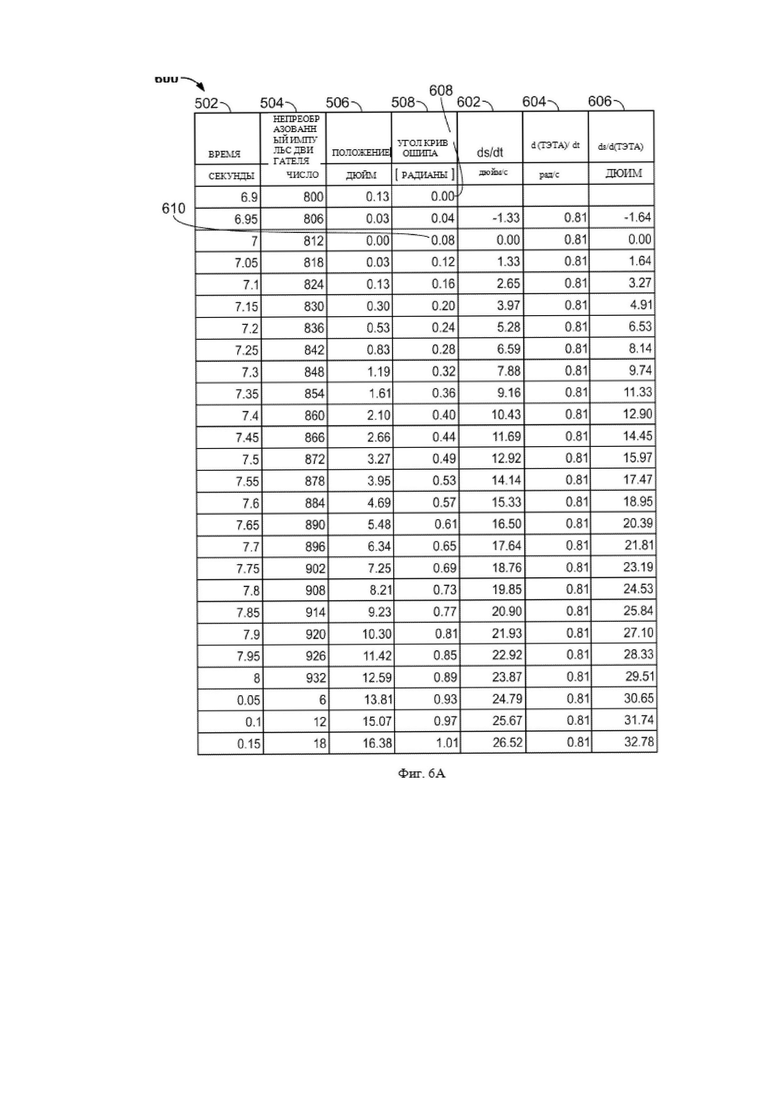
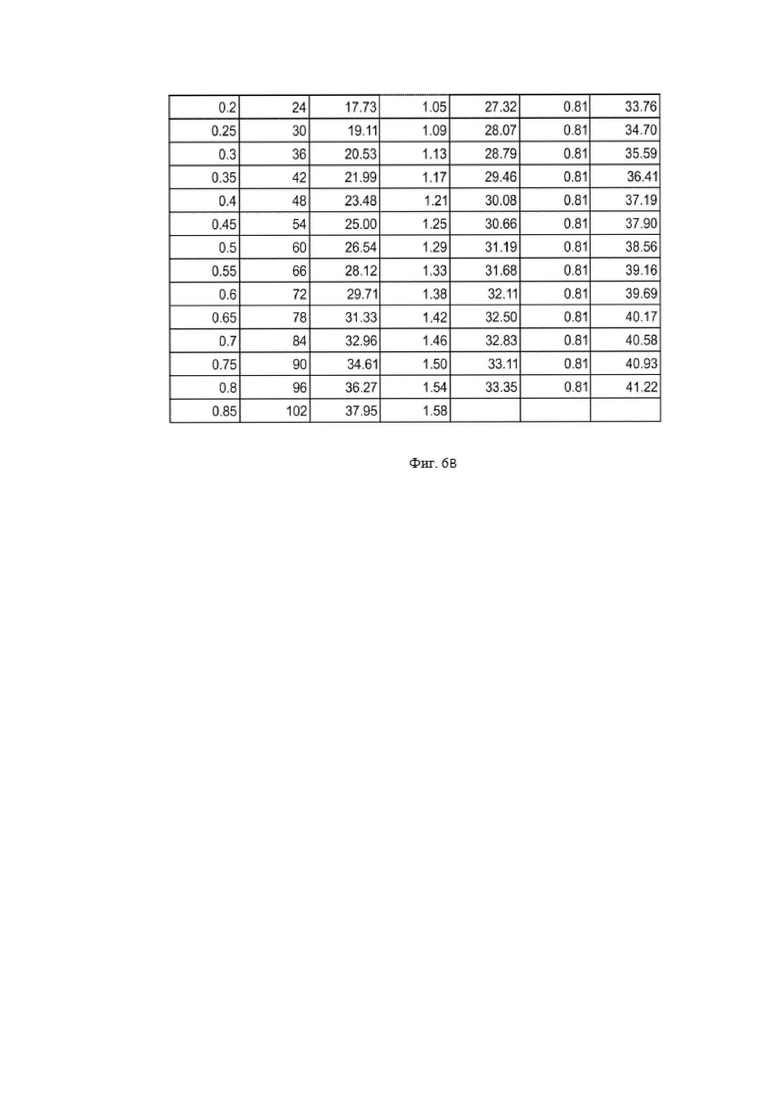
[0011] Фиг. 6А и 6В представляют другой пример справочной таблицы, созданной с использованием раскрытых в настоящем документе примеров.
[0012] Фиг. 7-10 отображают схемы последовательности операций примеров способов, которые могут быть использованы для реализации примеров насосных установок по фиг. 1-3.
[0013] Фиг. 11 отображает процессорную платформу для реализации способов по фиг. 7-10 и/или устройства по фиг. 1-3.
[0014] Чертежи не обязательно выполнены в масштабе. Там, где это возможно, для обозначения одних и тех же или подобных деталей на всем чертеже (чертежах) и в сопровождающем их письменном описании будут использоваться одни и те же номера позиций.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0015] Поскольку насосная установка скважины проходит цикл, усилия и/или моменты кручения прилагаются к различным компонентам насосной установки. В некоторых случаях, если по меньшей мере некоторые из этих усилий и/или моментов кручения постоянно отслеживают и/или поддерживают ниже конкретного значения, срок службы насосной установки и/или ее компонентов может быть продлен. Примеры, раскрытые в настоящем документе, относятся к примерам контроллеров вставного штангового насоса и связанным с этим способам, которые постоянно отслеживают нагрузки и/или усилия, прилагаемые к редуктору насосной установки по существу в режиме реального времени. На основании постоянно отслеживаемых нагрузок и/или усилий контролер вставного штангового насоса может принуждать насосную установку работать таким образом, чтобы пиковые нагрузки редуктора поддерживались ниже заданного значения (например, расчетного предела) для продления срока службы, например, редуктора. Кроме того или в качестве альтернативы, примеры, раскрытые в настоящем документе, могут быть использованы для определения коэффициентов момента, угла сдвига фаз противовеса и/или моментов противовеса для насосной установки.
[0016] В некоторых случаях большая часть нагрузок, испытываемых редуктором, связана с моментом кручения противовеса и моментом кручения из-за нагрузки полированного штока. Момент кручения противовеса может быть равен минимальному значению (например, приблизительно нулю), когда плечо кривошипа находится в вертикальном положении, и максимальному значению, когда плечо кривошипа находится в горизонтальном положении. В некоторых случаях момент кручения полированного штока может быть определен на основании нагрузки полированного штока и коэффициента (коэффициентов) момента, который связан с нагрузкой полированного штока и моментом кручения полированного штока.
[0017] Коэффициенты момента для насосной установки могут быть определены различными способами. Например, коэффициенты момента могут быть определены на основании геометрии насосной установки и известных уравнений и/или примера процесса калибровки. Если коэффициент (коэффициенты) момента определяют, используя пример процесса калибровки и последующую обработку, коэффициент (коэффициенты) момента могут быть определены, используя конечно-разностное приближение и значения, определенные в ходе процесса калибровки и/или значения, определенные впоследствии. Независимо от способа определения коэффициента (коэффициентов) момента, коэффициент (коэффициенты) момента может быть использован для определения эффективного крутящего момента, испытываемого редуктором, угла сдвига фаз противовеса и/или максимального момента кручения противовеса. Во время эксплуатации насосная установка может действовать в режиме, по существу обеспечивающем, чтобы эффективный крутящий момент, испытываемый редуктором, и/или момент кручения противовеса поддерживался ниже их максимального (максимальных) и/или заданного значения (значений), для значительного увеличения срока службы компонентов насосной установки. Кроме того, или в качестве альтернативы, угол сдвига фаз и/или компоненты насосной установки могут быть отрегулированы таким образом, чтобы снижать эффективный крутящий момент, испытываемый редуктором.
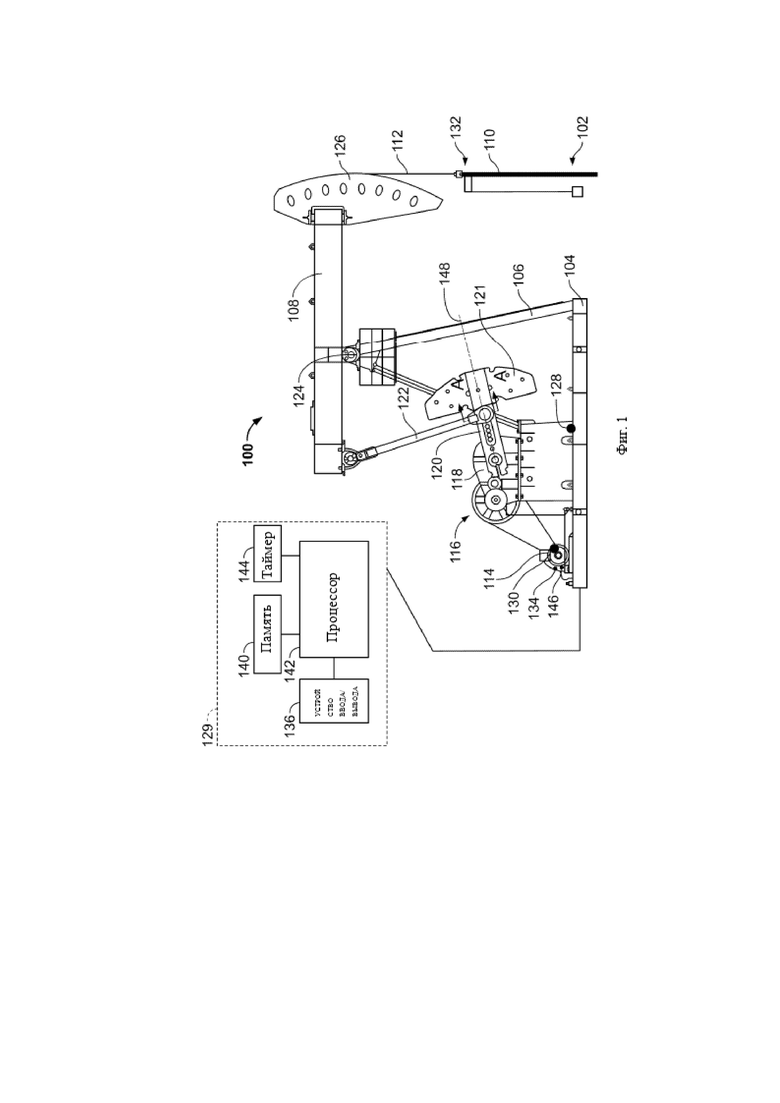
[0018] Фиг. 1 изображает пример штанговой насосной установки с кривошипным уравновешиванием, и/или насосную установку 100, которая может быть использована для добычи нефти из нефтяной скважины 102. Насосная установка 100 содержит основание 104, стойку 106 станка-качалки и балансир 108. Балансир 108 может быть использован для возвратно-поступательного движения полированного штока 110 относительно нефтяной скважины 102 через подвеску 112.
[0019] Насосная установка 100 содержит двигатель 114, приводящий в действие ременную передачу 116 для вращения редуктора 118 и, в свою очередь, вращения плеча 120 кривошипа и противовеса и/или уравновешивающего механизма 121. Шатун 122 присоединен между плечом 120 кривошипа и балансиром 108, так что при вращении плеча 120 кривошипа движется шатун 122 и балансир 108. Поскольку балансир 108 поворачивается вокруг оси поворота и/или опоры балансира 124, балансир 108 перемещает балансир 126 штангового насоса и полированный шток 110.
[0020] Для обнаружения того, когда плечо 120 кривошипа завершает цикл и/или проходит конкретное угловое положение, первый датчик 128 подсоединен рядом с плечом 120 кривошипа. Для обнаружения и/или мониторинга числа оборотов двигателя 114, второй датчик 130 подсоединен рядом с двигателем 114. Третий датчик (например, потенциометр колонны, датчик линейного перемещения, использующий радар, лазер и т.п.) 132 подсоединен к насосной установке 100 и используется в сочетании с первым и вторым датчиками (например, датчиками приближения) 128, 130 для калибровки контроллера вставного штангового насоса и/или устройства 129 в соответствии с принципами настоящего изобретения. В отличие от некоторых известных способов калибровки, которые основаны на измерении насосной установки и определении смещения плеча кривошипа / полированного штока, пример устройства 129 калибруют путем измерения непосредственно положения полированного штока 110 и вращения двигателя 114 на протяжении цикла плеча 120 кривошипа.
[0021] В некоторых случаях для калибровки устройства 129 по фиг. 1 первый датчик 128 обнаруживает завершение цикла плеча 120 кривошипа, второй датчик 130 обнаруживает одну или более мишеней, 134 соединенных с двигателем 114 и/или валом двигателя 114, когда двигатель 114 вращается, и третий датчик 132 измеряет непосредственно положение полированного штока 110 на протяжении его хода. Данные, полученные от первого, второго и третьего датчиков 128, 130 и 132, принимаются устройством 136 ввода/вывода (input/out, I/O) устройства 129 и сохраняются в памяти 140, доступ к которой выполняется с помощью процессора 142, расположенного в корпусе устройства 129. Например, в ходе процесса калибровки процессор 142 многократно принимает и/или по существу одновременно принимает (например, каждые 50 миллисекунд, каждые 5 секунд, между примерно 5 секундами и 60 секундами) число импульсов кривошипа и/или импульс от первого датчика 128, число импульсов двигателя в сравнении со временем и/или импульс от второго датчика 130, и положение полированного штока 110 в сравнении со временем от третьего датчика 132. В некоторых случаях таймер 144 используется процессором 142 и/или первым, вторым и/или третьим датчиками 128, 130 и/или 132 для определения периода выборки и/или для определения того, когда запрашивать, отправлять и/или принимать данные (например, значения измеренных параметров) от первого, второго и третьего датчиков 128, 130 и 132. Кроме того, в некоторых случаях входной сигнал (например, входной сигнал датчика, ввод данных оператором) может быть принят устройством 136 ввода/вывода, указывающим, когда плечо 120 кривошипа занимает вертикальное положение. Момент кручения противовеса может быть равен минимальному значению (например, примерно нулю), когда плечо 120 кривошипа занимает вертикальное положение. На основе входного сигнала может быть определено число импульсов двигателя от точки в цикле насосной установки 100 до вертикального положения.
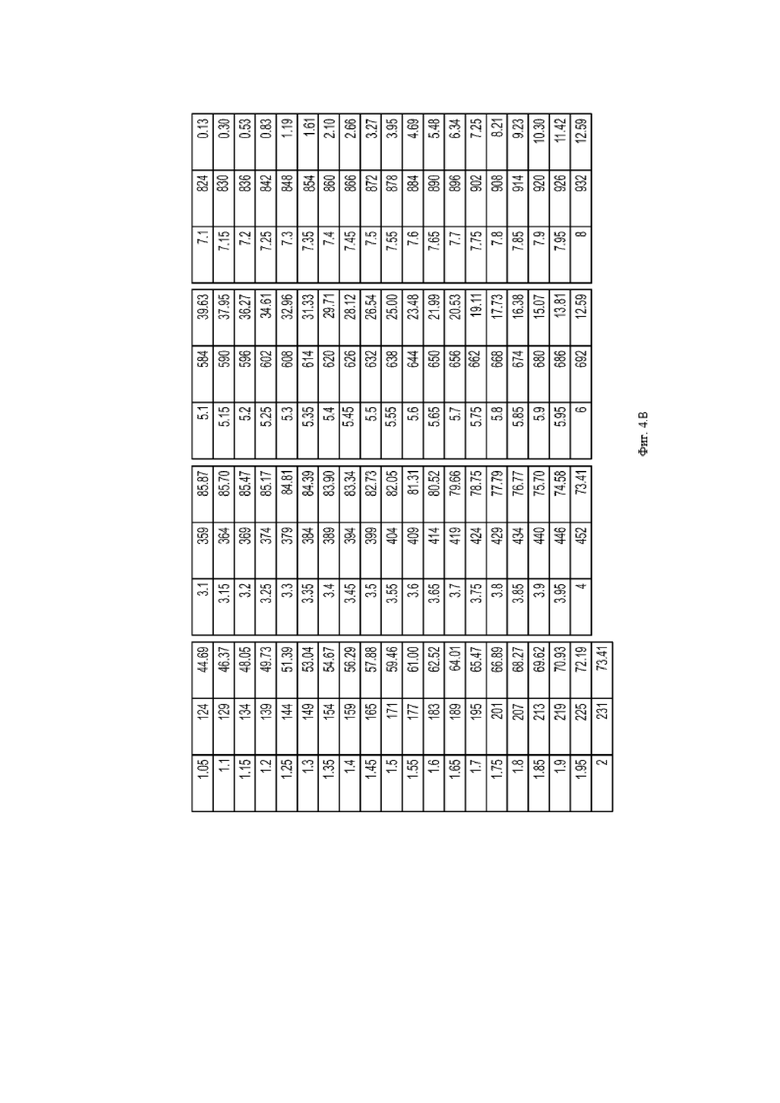
[0022] В некоторых случаях процессор 142 создает справочную и/или калибровочную таблицу 400 (фиг. 4А и 4В), отображающую связь (связи) между этими измеренными значениями параметров (например, время, число импульсов двигателя, и положение полированного штока) для полного цикла (циклов) насосной установки 100 на основании положения полированного штока 110 в зависимости от времени, и число импульсов двигателя в зависимости от времени между двумя последовательными отсчетами импульса кривошипа (например, оборот плеча 120 кривошипа). В некоторых случаях время может быть измерено в секундах, а положение полированного штока 110 может быть измерено в дюймах.
[0023] После того как процесс калибровки завершен, и соответствующая справочная таблица 400 создана, определенные данные положения (например, положения полированного штока 110 в зависимости от данных времени) сохраняются в памяти 140 и/или используются процессором 142 для создания динамограммы, такой как, например, динамограмма штока насоса, динамограмма поверхности, динамограмма насоса, и т.п. Динамограммы могут быть использованы для идентификации нагрузки, F, например, на полированный шток 110. Дополнительно или в качестве альтернативы, значения, включенные в справочную таблицу 400, могут быть использованы для определения числа импульсов двигателя за оборот плеча 120 кривошипа.
[0024] Как показано в справочной таблице 500 по фиг. 5А и 5В, значения справочной таблицы 400 по фиг. 4А и 4В могут быть отрегулированы таким образом, чтобы измерения основывались на вертикальном положении плеча 120 кривошипа, а масштабирование было связано с угловыми смещениями кривошипа (т.е. углом кривошипа). В некоторых случаях уравнение 1 может быть использовано для определения угла кривошипа на основании значений, включенных в справочную таблицу 400, где MP соответствует числу импульсов двигателя, обнаруженных вторым датчиком 130, MPPCZ соответствует числу импульсов двигателя, обнаруженных вторым датчиком 130, когда плечо 120 кривошипа находится в нулевом положении, a MPPCR соответствует числу импульсов двигателя, обнаруженных вторым датчиком 130 в процессе одного оборота плеча 120 кривошипа.
[0025] Уравнение 1: 
[0026] Уравнение 2 может быть использовано для определения крутящего момента, созданного за счет нагрузки полированного штока, TPRL(θ), когда плечо 120 кривошипа находится под углом, θ, где F соответствует нагрузке полированного штока, а  соответствует скорости изменения положения полированного штока 110 по отношению к изменению угла плеча 120 кривошипа (например, коэффициента момента). Уравнение 3 может быть использовано для определения коэффициента момента,
соответствует скорости изменения положения полированного штока 110 по отношению к изменению угла плеча 120 кривошипа (например, коэффициента момента). Уравнение 3 может быть использовано для определения коэффициента момента,  где
где  соответствует изменению положения полированного штока 110 относительно времени (например, скорости полированного штока), а
соответствует изменению положения полированного штока 110 относительно времени (например, скорости полированного штока), а  соответствует угловой скорости плеча 120 кривошипа. В частности, в некоторых случаях и, как показано в справочной таблице 600 по фиг. 6А и 6В, центральная разностная аппроксимация первого порядка может быть использована для определения
соответствует угловой скорости плеча 120 кривошипа. В частности, в некоторых случаях и, как показано в справочной таблице 600 по фиг. 6А и 6В, центральная разностная аппроксимация первого порядка может быть использована для определения  и
и  а взаимосвязь, показанная в уравнении 3, может быть использована для определения коэффициента момента,
а взаимосвязь, показанная в уравнении 3, может быть использована для определения коэффициента момента,  В некоторых случаях, описанных в настоящем документе, коэффициент момента может быть представлен в виде TF(θ) или
В некоторых случаях, описанных в настоящем документе, коэффициент момента может быть представлен в виде TF(θ) или
[0027] Уравнение 2: 
[0028] Уравнение 3: 
[0029] Уравнение 4 показывает взаимосвязь между эффективным крутящим моментом, TNet(θ), испытываемым валом редуктора 118, когда плечо 120 кривошипа находится под углом, θ, моментом кручения противовеса, TGB(θ), когда плечо 120 кривошипа находится под углом, θ, и моментом кручения, TPRL(θ), от нагрузки полированного штока 110, когда плечо 120 кривошипа находится под углом, θ. В уравнении 4, вращающим моментом сил инерции насосной установки 100 пренебрегают. Уравнение 5 может быть использовано для определения эффективного крутящего момента, TNet(θ), на редукторе 118. Обращаясь к уравнению 5, TNP(θ), соответствует моменту кручения двигателя, MPPCR соответствует числу импульсов двигателя 114, зарегистрированному в продолжение одного оборота плеча 120 кривошипа, и Targets соответствует числу мишеней 134, соединенных с двигателем 114 и/или его валом. В некоторых случаях момент кручения двигателя определяют с помощью четвертого датчика (например, привода с бесступенчатым регулированием скорости) 146, соединенного с двигателем 114. Эффективный крутящий момент, TNet(θ), на редукторе 118 может быть представлен в показателях фунто-дюймов, а не фунто-футов. Таким образом, число двенадцать может быть включено в уравнение 5 для представления эффективного крутящего момента в показателях фунто-дюймов. Уравнение 6 отображает взаимосвязь между моментом кручения противовеса, TGB(θ), при угле, θ, максимальным моментом кручения противовеса, М, и углом сдвига фаз, τ, противовеса, в радианах.
[0030] Уравнение 4: TNet(θ)=TGB(θ)+TPRL(θ)
[0031] Уравнение 5: 
[0032] Уравнение 6: TGB(θ)=-М*sin(θ+τ)
[0033] Уравнение 7 представляет комбинацию уравнений 2, 4 и 6, где TNet(θ) соответствует эффективному крутящему моменту на редукторе 118 и/или его вале, М соответствует максимальному моменту кручения противовеса, θ соответствует угловому смещению плеча 120 кривошипа от вертикали, τ соответствует углу сдвига фаз противовеса в радианах, F соответствует мгновенной нагрузке полированного штока 110 и TF(θ) соответствует коэффициенту момента при угле, θ, плеча 120 кривошипа.
[0034] Уравнение 7: TNet(θ)=[-М*sin(θ+τ)]+F*TF(θ)
[0035] Уравнение 8 может быть использовано для определения угла сдвига фаз противовеса с использованием коэффициентов момента, TNet(θ), при различных углах кривошипа. Например, используя уравнения 9, 10, 11 и 12, могут быть определены соответствующие коэффициенты момента, когда угол кривошипа равен 0,  π and
π and  В некотор и случаях коэффициенты момента между каждым из углов кривошипа 0,
В некотор и случаях коэффициенты момента между каждым из углов кривошипа 0,  π and
π and  могли быть интерполированы. Уравнение 10 также может быть переписано для решения для максимального момента кручения противовеса, М, как показано в уравнении 13.
могли быть интерполированы. Уравнение 10 также может быть переписано для решения для максимального момента кручения противовеса, М, как показано в уравнении 13.
[0036] Уравнение 8: 
[0037] Уравнение 9: TNet(θ)=[-М*sin(τ)]+F(0)*TF(0)
[0038] Уравнение 10: 
[0039] Уравнение 11: TNet(π)=[М*sin(τ)]+F(π)*TF(π)
[0040] Уравнение 12: 
[0041] Уравнение 13: 
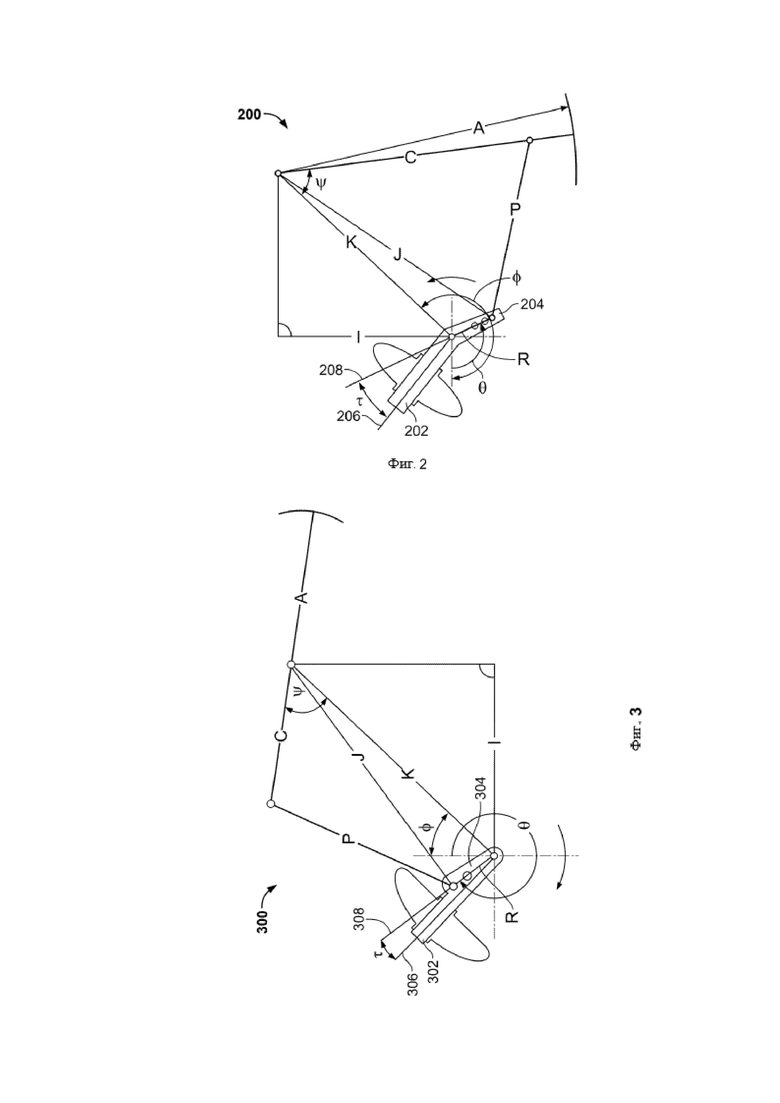
[0042] Фиг. 2 изображает насосную установку типа Mark II и/или насосную установку 200, которая может быть использована для реализации примеров, раскрытых в настоящем документе. В отличие от штанговой насосной установки 100 с кривошипным уравновешиванием по фиг. 1, в которой пальцы плеча 120 кривошипа и противовес используют общую ось 148, насосная установка 200 типа Mark II содержит плечо 202 противовеса и плечо 204 пальца, имеющие смещенные оси 206 и 208. Смещенные оси 206 и 208 обеспечивают насосной установке 200 положительный угол сдвига фаз, τ.
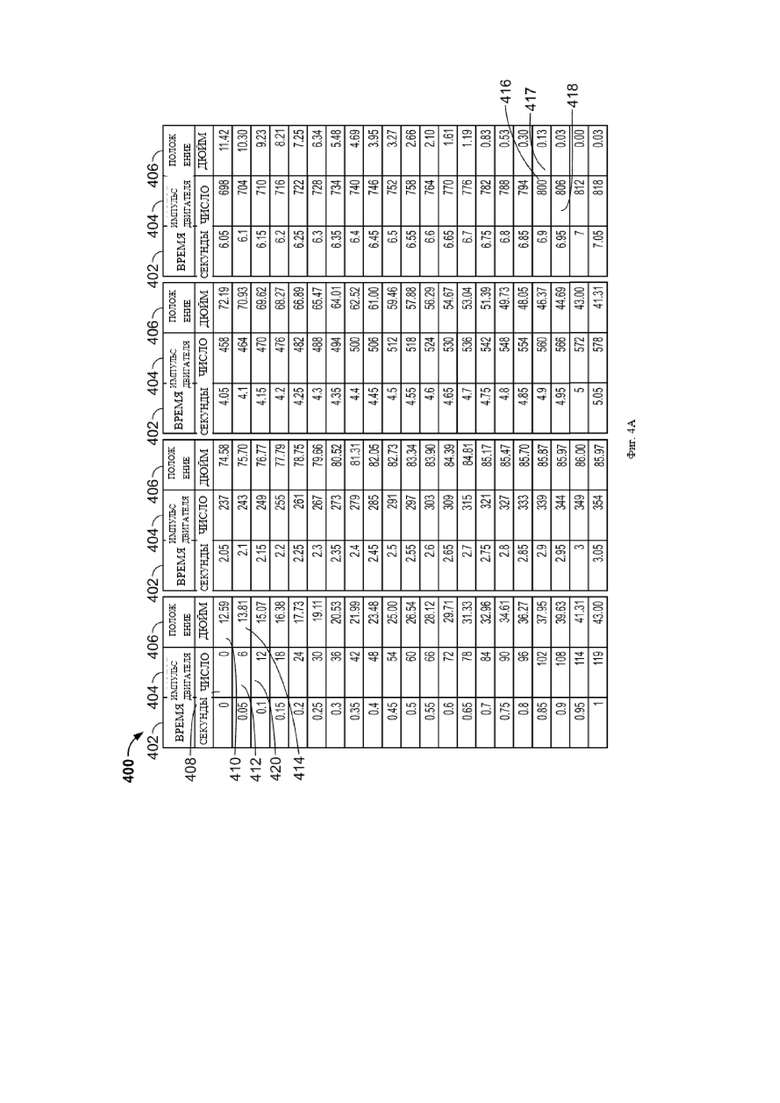
[0043] Фиг. 3 изображает насосную установку с усовершенствованной геометрией и/или насосную установку 300, которая может быть использована для реализации примеров, раскрытых в настоящем документе. В отличие от штанговой насосной установки 100 с кривошипным уравновешиванием по фиг. 1, в которой пальцы плеча 120 кривошипа и противовес используют общую ось 148, насосная установка 300 с усовершенствованной геометрией содержит плечо 302 противовеса и плечо 304 пальца, имеющие смещенные оси 306 и 308. Смещенные оси 306 и 308 обеспечивают насосной установке 300 отрицательный угол сдвига фаз, τ.
[0044] Фиг. 4А и 4В изображают пример справочной таблицы 400, которая может быть создана в связи с реализацией примеров, раскрытых в настоящем документе, и/или может быть использована для такой реализации. Пример справочной таблицы 400 включает в себя первые столбцы 402, соответствующие времени, принятому от таймера 144, и/или определенному им, вторые столбцы 404, соответствующие числу импульсов двигателя 114, принятому от второго датчика 130, и/или определенному им, и третьи столбцы 406, соответствующие положению полированного штока 110, полученному от третьего датчика 132, и/или определенному им. В некоторых случаях данные, включенные в справочную таблицу 400, относятся к одному обороту плеча 120 кривошипа
[0045] Фиг. 5А и 5В изображают пример справочной таблицы 500, которая может быть создана в связи с реализацией примеров, раскрытых в настоящем документе, и/или может быть использована для такой реализации. В некоторых случаях справочная таблица 500 создается путем регулирования значений справочной таблицы 400 по фиг. 4А и 4В таким образом, чтобы измерения основывались на вертикальном положении плеча 120 кривошипа, а масштабирование было связано с угловыми смещениями кривошипа (т.е. углом кривошипа в радианах). Пример справочной таблицы 500 включает в себя первые столбцы 502, соответствующие времени, принятому от таймера 144, и/или определенному им, вторые столбцы 504, соответствующие числу импульсов двигателя 114, принятому от второго датчика 130, и/или определенному им, и третьи столбцы 506, соответствующие положению полированного штока 110, полученному от третьего датчика 132, и/или определенному им, и четвертые столбцы 508, соответствующие углу кривошипа.
[0046] Фиг. 6А и 6В изображают пример справочной таблицы 600, которая может быть создана в связи с реализацией примеров, раскрытых в настоящем документе, и/или может быть использована для такой реализации. В некоторых случаях справочная таблица 600 создается, используя центральную разностную аппроксимацию первого порядка для определения  и
и  а взаимосвязь, показанная в уравнении 3, может быть использована для определения коэффициента момента,
а взаимосвязь, показанная в уравнении 3, может быть использована для определения коэффициента момента,  Пример справочной таблицы 600 включает в себя первый столбец 502, соответствующий времени, принятому от таймера 144, и/или определенному им, второй столбец 504, соответствующий числу импульсов двигателя 114, принятому от второго датчика 130, и/или определенному им, третий столбец 506, соответствующий положению полированного штока 110, полученному от третьего датчика 132, и/или определенному им, и четвертый столбец 508, соответствующий углу кривошипа. Справочная таблица 600 также содержит пятый столбец 602, соответствующий
Пример справочной таблицы 600 включает в себя первый столбец 502, соответствующий времени, принятому от таймера 144, и/или определенному им, второй столбец 504, соответствующий числу импульсов двигателя 114, принятому от второго датчика 130, и/или определенному им, третий столбец 506, соответствующий положению полированного штока 110, полученному от третьего датчика 132, и/или определенному им, и четвертый столбец 508, соответствующий углу кривошипа. Справочная таблица 600 также содержит пятый столбец 602, соответствующий  шестой столбец 604, соответствующий
шестой столбец 604, соответствующий  и седьмой столбец 606, соответствующий
и седьмой столбец 606, соответствующий 
[0047] Тогда как в виде примера вариант реализации устройства 129 показан на фиг. 1, один или больше из элементов, процессов и/или устройств, показанных на фиг. 1, могут быть объединены, разделены, перегруппированы, опущены, исключены и/или реализованы другим способом. Кроме того, устройство 136 ввода/вывода, память 140, процессор 142 и/или, вообще, пример устройства 129 по фиг. 1 может быть реализован с помощью аппаратных средств, программного обеспечения, программно-аппаратного обеспечения и/или любого сочетания аппаратных средств, программного обеспечения и/или программно-аппаратного обеспечения. Таким образом, например, любой элемент из устройства 136 ввода/вывода, памяти 140, процессора 142, таймера 144 и/или, вообще, пример устройства 129 по фиг. 1 может быть реализован с помощью одной или больше аналоговой или цифровой схемы (схем), логических схем, программируемого процессора (процессоров), интегральной схемы (схем) специального назначения (application specific integrated circuit(s) (ASIC(s)), программируемого логического устройства (устройств) (programmable logic device(s) (PLD(s)) и/или программируемого пользователем логического устройства (устройств) (field programmable logic device(s) (FPLD(s)). При чтении любых из пунктов формулы настоящего патента относительно устройства или системы для охвата чисто программной и/или программно-аппаратной реализации по меньшей мере один из примеров устройства 136 ввода/вывода, памяти 140, процессора 142, таймера 144 и/или, вообще, пример устройства 129 по фиг. 1 здесь является/являются четко определенными, включая в себя материальное компьютерное запоминающее устройство или запоминающий диск, такой как память, цифровой универсальный диск (digital versatile disk (DVD)), компакт-диск (compact disk (CD),) диск Blu-ray, и т.п., сохраняющий программное обеспечение и/или программно-аппаратное обеспечение. Кроме того, пример устройства 129 по фиг. 1 может включать в себя один или больше элементов, процессов и/или устройств в дополнение к тем, или вместо тех, которые показаны на фиг. 1, и/или может включать в себя больше, чем один из любых или все из показанных элементов, процессов и устройств.
[0048] В то время как на фиг. 1 изображена обычная штанговая насосная установка с кривошипным уравновешиванием, примеры, раскрытые в настоящем документе, могут быть реализованы в связи с любой другой насосной установкой. Например, пример устройства 129 и/или датчиков 128, 130, 132 и/или 146 может быть реализован в насосной установке 200 по фиг. 2 и/или в насосной установке 300 по фиг. 3.
[0049] Схемы последовательности операций, представляющие примеры способов для реализации устройства 129 по фиг. 1, изображены на фиг. 7-10. В данном примере способы по фиг. 7-10 могут быть реализованы в виде машиночитаемых команд, которые содержат программу для выполнения процессором, таким как процессор 1112, показанный в примере процессорной платформы 1100, описанной ниже в связи с фиг. 11. Программа может быть реализована в программном обеспечении, сохраняемом на материальном читаемом компьютером запоминающем носителе данных, таком как компакт-диск (CD-ROM), гибкий диск, накопитель на жестком диске, цифровой универсальный диск (DVD), диск Blu-ray, или память, связанная с процессором 1112, но вся программа и/или часть ее может альтернативно выполняться с помощью устройства, иного, чем процессор 1112, и/или реализоваться в программно-аппаратном обеспечении или выделенном аппаратном обеспечении. Кроме того, хотя примерная программа описана со ссылками на схему последовательности операций, показанную на фиг. 7-10, альтернативно могут быть использованы многие другие способы реализации варианта устройства 129. Например, порядок выполнения этапов может быть изменен, и/или некоторые описанные этапы могут быть изменены, пропущены или скомбинированы.
[0050] Как упомянуто выше, примеры способов действия по фиг. 7-10 могут быть реализованы с использованием кодированных команд (например, компьютеро- и/или машиночитаемых команд), сохраняемых на материальном читаемом компьютером запоминающем носителе данных, таком как накопитель на жестком диске, флеш-память, постоянное запоминающее устройство (ROM), компакт-диск (CD), цифровой универсальный диск (DVD), кэш-память, оперативное запоминающее устройство (RAM) и/или любое другое запоминающее устройство или запоминающий диск, в котором данные сохраняются в течение любого времени (например, в течение длительных периодов времени, постоянно, для кратких примеров, для временной буферизации, и/или для кэширования данных). Используемый в данном документе термин «материальный читаемый компьютером запоминающий носитель данных» четко определен, чтобы включать любой тип машиночитаемого носителя данных и/или запоминающего диска, и чтобы исключать распространяющиеся сигналы, и чтобы исключать передающую среду. Используемые в данном документе термины «материальный читаемый компьютером запоминающий носитель данных» и «материальный машиночитаемый запоминающий носитель данных», используются как взаимозаменяемые. Дополнительно или альтернативно, примеры способов действия по фиг. 7-10 могут быть реализованы с использованием кодированных команд (например, компьютеро- и/или машиночитаемых команд), сохраняемых на энергонезависимом компьютеро- и/или машиночитаемом запоминающем носителе данных, таком как накопитель на жестком диске, флеш-память, постоянное запоминающее устройство, компакт-диск, цифровой универсальный диск, кэш-память, оперативное запоминающее устройство и/или любое другое запоминающее устройство или запоминающий диск, в котором данные сохраняются в течение любого времени (например, в течение длительных периодов времени, постоянно, для кратких примеров, для временной буферизации, и/или для кэширования данных). Используемый в данном документе термин «энергонезависимый читаемый компьютером запоминающий носитель данных» четко определен, чтобы включать любой тип читаемого компьютером носителя данных и/или запоминающего диска, и чтобы исключать распространяющиеся сигналы, и чтобы исключать передающую среду. В данном контексте, использование фразы «по меньшей мере» в качестве переходного термина в преамбуле формулы изобретения означает возможность изменения, точно так же, как и термин «содержит» означает возможность изменения.
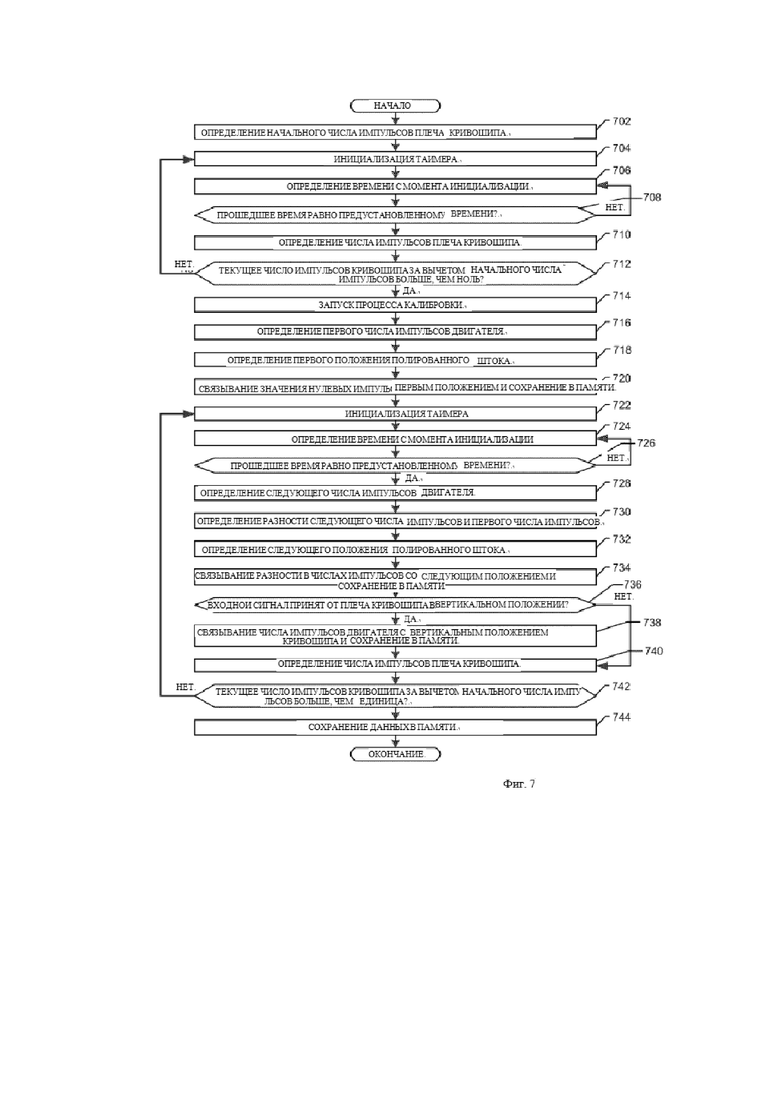
[0051] Способ по фиг. 7 может быть использован для создания справочной таблицы 400, и начинается в режиме подготовки калибровки, которая включает в себя определение начального числа импульсов плеча 120 кривошипа (этап 702). На этапе 704, процессор 142 запускает и/или инициализирует таймер 144 (этап 704). На этапе 706 процессор 142 определяет, с помощью таймера 144, количество времени, прошедшее с момента инициализации таймера 144 (этап 706). На этапе 708 процессор 142 определяет, равно ли прошедшее время заданному времени, например, пятьдесят миллисекунд, или превосходит его (этап 708). Таймер 144 может быть использован для установки периода выборки и/или по существу обеспечивает получение данных от первого, второго и/или третьего датчиков 128, 130, 132 при равных частотах. Если процессор 142 определяет, что прошедшее время равно заданному времени или превосходит его, на основании данных от первого датчика 128, процессор 142 определяет число импульсов плеча 120 кривошипа (этап 710). На этапе 712 процессор 142 определяет, на основании данных от первого датчика 128, является ли разность между текущим числом импульсов плеча 120 кривошипа и начальным числом импульсов плеча 120 кривошипа большей, чем ноль (этап 712). В некоторых случаях число импульсов плеча 120 кривошипа изменяется от нуля до единицы, после того как цикл плеча 120 кривошипа завершен. В некоторых примерах, в которых число импульсов начинается с одного, процессор 142 определяет, изменилось ли число импульсов плеча 120 кривошипа.
[0052] Если разность числа импульсов на этапе 712 равна нулю, на основании данных от первого датчика 128, процессор 142 снова инициализирует таймер 144 (этап 704). Однако если разность числа импульсов на этапе 712 больше нуля, инициируется процесс калибровки (этап 714). На этапе 716, второй датчик 130 определяет первое число импульсов двигателя 114 (этап 716). В других примерах, сразу же после инициирования процесса калибровки число импульсов двигателя 114 не получается. На этапе 718, на основании данных от третьего датчика 132, процессор 129 определяет первое положение полированного штока 110 (этап 718). Затем процессор 142 связывает значение нулевых импульсов с первым положением полированного штока 110 и сохраняет эти данные в памяти 140 (этап 720). Например, число импульсов может быть сохранено в первом вводе данных 408 второго столбца 404 справочной таблицы 400, а первое положение полированного штока ПО может быть сохранено в первом вводе данных 410 третьего столбца 406 справочной таблицы 400.
[0053] На этапе 722 процессор 142 снова запускает и/или инициализирует таймер 144. На этапе 724 процессор 142 определяет, с помощью таймера 144, количество времени, прошедшее с момента инициализации таймера 144 (этап 724). На этапе 726 процессор 142 определяет, равно ли прошедшее время заданному времени, например, пятьдесят миллисекунд, или превосходит его (этап 726). Если процессор 142 определяет, что прошедшее время равно заданному времени или превосходит его, на основании данных от второго датчика 130, процессор 142 определяет второе и/или следующее число импульсов двигателя 114 (этап 728).
[0054] На этапе 730 процессор 142 определяет разность между вторым и/или следующим числом импульсов и первым числом импульсов (этап 730). На этапе 732, на основании данных от третьего датчика 200, процессор 142 определяет второе и/или следующее положение полированного штока 110 (этап 732). На этапе 734 процессор 142 связывает разность между первым и вторым числом импульсов со вторым положением и/или следующим положением полированного штока 110 и сохраняет данные в памяти 140. Например, разность числа импульсов может быть сохранена во втором вводе данных 412 второго столбца 404 справочной таблицы 400, а второе положение полированного штока 110 может быть сохранено во втором вводе данных 414 третьего столбца 406 справочной таблицы 400. На этапе 736 процессор 142 определяет, получен ли входной сигнал, связанный с плечом 120 кривошипа, находящимся в вертикальном и/или нулевом положении (этап 736). В некоторых случаях входной сигнал может быть входным сигналом, полученным от оператора и/или датчика, который определяет, когда плечо 120 кривошипа находится в вертикальном и/или нулевом положении. Если принимается входной сигнал относительно плеча 120 кривошипа, находящегося в вертикальном и/или нулевом положении, процессор 142 связывает второе или следующее число импульсов с плечом 120 кривошипа, находящимся в вертикальном и/или нулевом положении, и сохраняет эту информацию в памяти 140 (этап 738).
[0055] На этапе 740, на основании данных от первого датчика 128, процессор 142 определяет число импульсов плеча 120 кривошипа (этап 740). На этапе 742 процессор 142 определяет, является ли разность между текущим числом импульсов плеча 120 кривошипа и начальным числом импульсов плеча 120 кривошипа большей, чем единица (этап 742). В некоторых случаях число импульсов плеча 120 кривошипа изменяется, если плечо 120 кривошипа завершает цикл. На этапе 744 полученные данные, созданная справочная таблица 400 и/или обработанные данные сохраняются в памяти 140 (этап 744). Созданная справочная таблица 400 может быть использована в сочетании с данными от первого и/или второго датчиков 128, 130 для определения положения полированного штока 110, когда насосная установка 100 работает непрерывно. В некоторых случаях данные, включенные в справочную таблицу 400, могут быть использованы для создания динамограммы, которая идентифицирует нагрузку, F, например, на полированный шток 110. Кроме того, таблица 400 может быть использована для определения эффективного крутящего момента, TNet(θ), испытываемого редуктором 118, момента кручения противовеса, TGB(θ) когда плечо 120 кривошипа находится под углом, θ, и/или момента кручения, TPRL(θ),, обусловленного полированным штоком 110, когда плечо 120 кривошипа находится под углом, θ.
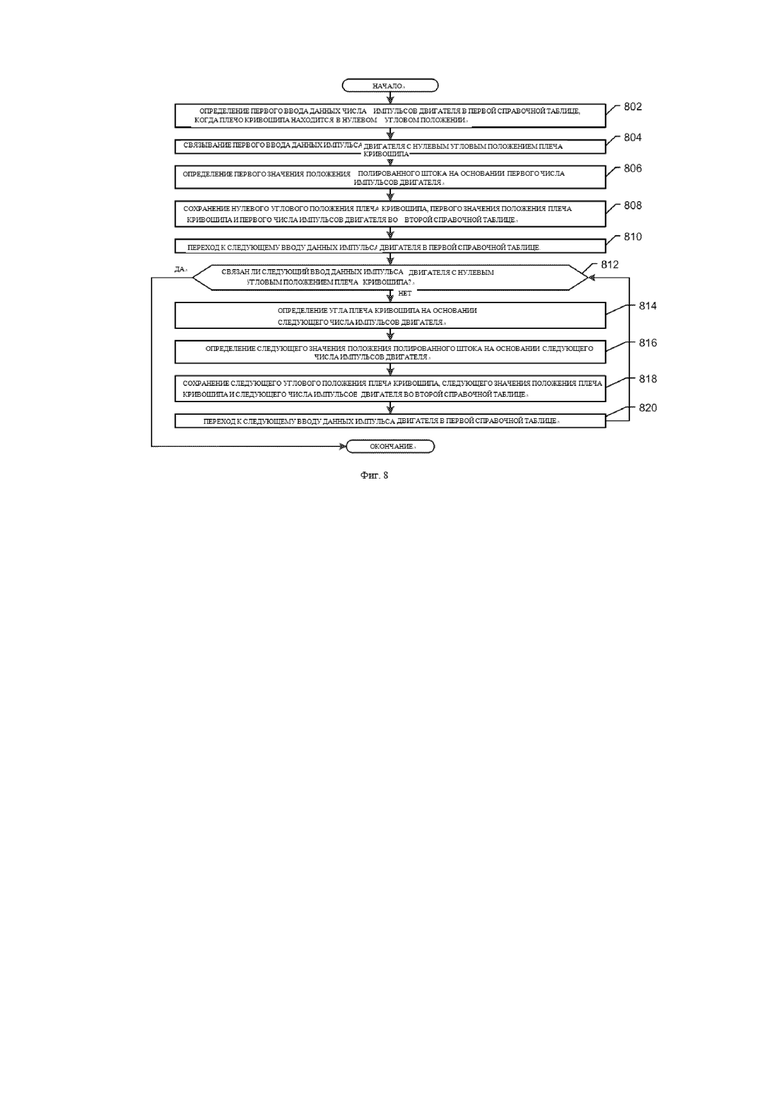
[0056] Способ по фиг. 8 может быть использован для создания справочной таблицы 500, и начинается с определения процессором 142 первого ввода данных импульса двигателя в справочной таблице 400, который связан с плечом 120 кривошипа, находящимся в вертикальном и/или нулевом угловом положении (этап 802). Плечо 120 кривошипа может быть связано с нахождением в вертикальном и/или нулевом положении на основании входного сигнала, полученного процессором 142. Входной сигнал может быть получен от датчика и/или от оператора. В справочной таблице 400 по фиг. 4А и 4В, плечо 120 кривошипа было идентифицировано как пребывающее в нулевом угловом положении (например, вертикальном положении), когда число импульсов двигателя равно 800 при вводе данных 416.
[0057] На этапе 804, процессор 142 связывает первый ввод данных числа импульсов двигателя с нулевым угловым положением плеча 120 кривошипа (этап 804). Процессор 142 также идентифицирует первое положение 110 полированного штока при вводе данных 417, которое связано с первым числом импульсов двигателя (этап 806). На этапе 808, процессор 142 сохраняет нулевое положение плеча 120 кривошипа при вводе данных 510, первое положение полированного штока 110 при вводе данных 512 и первое число импульсов двигателя при вводе данных 514 во второй справочной таблице 500 (этап 808).
[0058] На этапе 810, процессор 142 переходит к следующему вводу данных импульса двигателя в первой справочной таблице 400 (этап 810). Например, если следующий ввод данных импульса двигателя происходит непосредственно после первого ввода данных импульса двигателя, процессор 142 будет переходить от ввода данных 416 к вводу данных 418. Затем процессор 142 определяет, связан ли следующий ввод данных импульса двигателя с нулевым угловым положением плеча 120 кривошипа (этап 812). В некоторых случаях следующий ввод данных импульса двигателя связан с нулевым угловым положением плеча 120 кривошипа на основании возврата плеча 120 кривошипа в нулевое угловое положение после полного цикла. Если следующий ввод данных импульса двигателя связан с нулевым угловым положением плеча 120 кривошипа, способ по фиг. 8 заканчивается. Однако, если следующий ввод данных импульса двигателя не связан с нулевым угловым положением плеча 120 кривошипа, управление переходит на этап 814.
[0059] На этапе 814, процессор определяет угол плеча 120 кривошипа на основании следующего ввода данных импульса двигателя (этап 814). Если следующий ввод данных числа импульсов двигателя представляет собой первый ввод данных 408 в справочной таблице 400, процессор 142 может использовать уравнение 14 для определения угла плеча 120 кривошипа. Если следующий ввод данных числа импульсов двигателя не представляет собой первый ввод данных 408 в справочной таблице 400, процессор 142 может использовать уравнение 15 для определения угла плеча 120 кривошипа.


[0062] Процессор 142 также определяет следующее положение полированного штока 110, связанное со следующим числом импульсов двигателя (этап 816). На этапе 818, процессор 142 сохраняет следующее положение плеча 120 кривошипа, например, при вводе данных 516, следующее положение полированного штока 110, например, при вводе данных 518 и следующее число импульсов двигателя, например, при вводе данных 520, во второй справочной таблице 500 (этап 818). На этапе 820, процессор 142 переходит к следующему вводу данных импульса двигателя в первой справочной таблице 400 (этап 820). Например, если следующий ввод данных импульса двигателя происходит непосредственно после второго ввода данных импульса двигателя, процессор 142 переходит от ввода данных 412 к вводу данных 420.
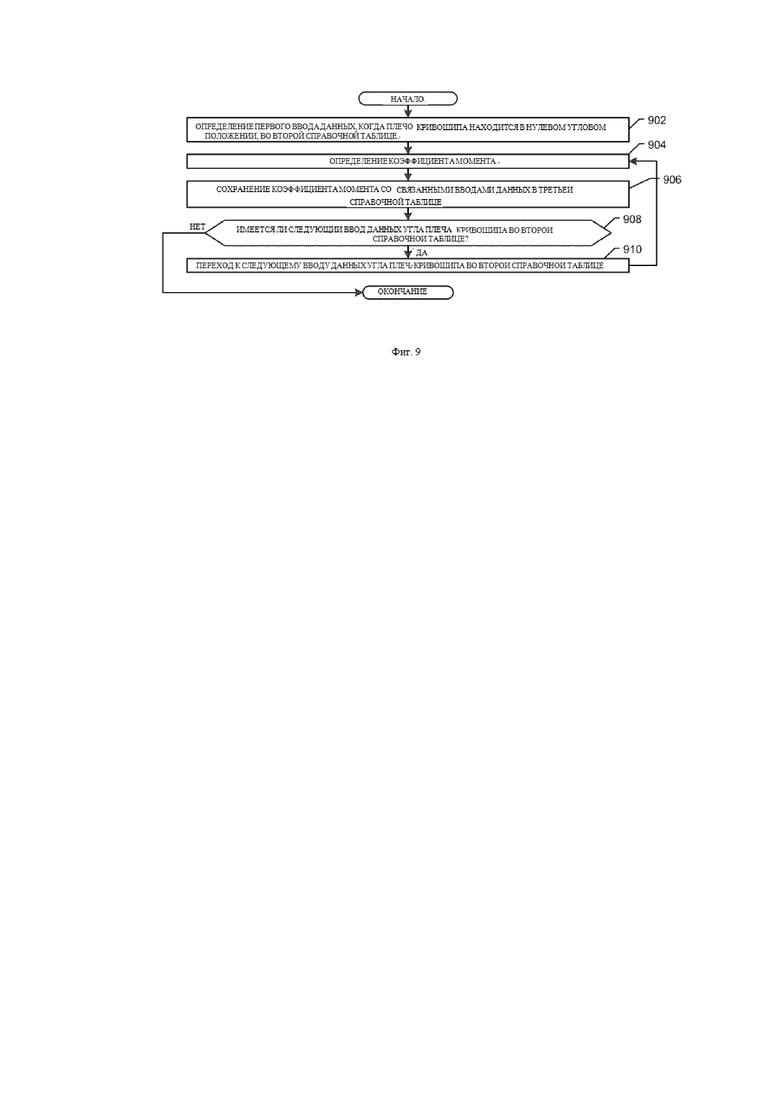
[0063] Способ по фиг. 9 может быть использован для создания справочной таблицы 500, и начинается с определения процессором 142 первого ввода данных 608 в справочной таблице 500, когда плечо 120 кривошипа находится в вертикальном и/или нулевом угловом положении (этап 902). На этапе 904 определяется коэффициент момента на основании связанного угла плеча 120 кривошипа (этап 904). В некоторых случаях центральная разностная аппроксимация первого порядка может быть использована для определения  и
и  а взаимосвязь, показанная в уравнении 3, может быть использована для определения коэффициента момента,
а взаимосвязь, показанная в уравнении 3, может быть использована для определения коэффициента момента,  Затем процессор 142 сохраняет
Затем процессор 142 сохраняет  в связанном вводе данных в пятом столбце 602,
в связанном вводе данных в пятом столбце 602,  в связанном вводе данных в шестом столбце 604, и
в связанном вводе данных в шестом столбце 604, и  в связанном вводе данных в седьмом столбце 606 (этап 906).
в связанном вводе данных в седьмом столбце 606 (этап 906).
[0064] Затем процессор 142 определяет, включает ли справочная таблица 500 другой ввод данных угла плеча 120 кривошипа (этап 908). Например, если больше нет вводов данных угла плеча 120 кривошипа (например, нет последующих вводов данных угла плеча 120 кривошипа), способ по фиг. 6А и 6В заканчивается. Однако если следующий ввод данных угла плеча 120 кривошипа находится, например, при вводе данных 610, процессор 142 затем переходит к следующему вводу данных угла плеча 120 кривошипа во второй справочной таблице 500 и (этап 910).
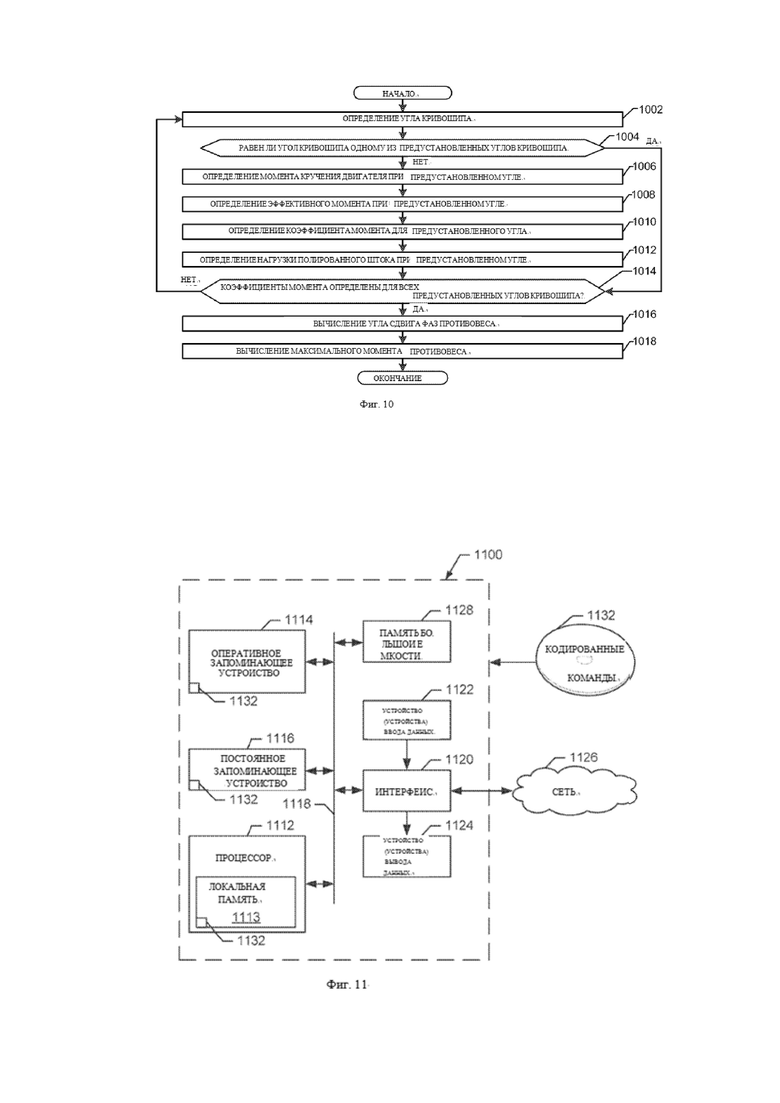
[0065] Способ по фиг. 10 может быть использован для определения угла сдвига фаз, τ, противовеса и/или максимального момента кручения противовеса, М, и начинается с определения процессором 142 угла плеча 120 кривошипа с использованием, например, одной или более справочных таблиц 500, 600 и 700 и/или ввода данных от одного или более датчиков 128, 130, 132 и/или 146 (этап 1002). Затем процессор 142 определяет, равен ли угол плеча 120 кривошипа одному из заданных углов плеча 120 кривошипа (этап 1004). В некоторых случаях заданные углы плеча 120 кривошипа составляют 0,  π,
π,  Если угол плеча 120 кривошипа равен одному из заданных углов плеча 120 кривошипа, процессор 142 определяет момент кручения двигателя 114 при заданном угле, используя, например, четвертый датчик 146 (этап 1006). В некоторых примерах четвертый датчик 146 представляет собой привод с бесступенчатым регулированием скорости (variable speed drive, VSD). На основании равенства угла плеча 120 кривошипа одному из TNP заданных углов плеча 120 кривошипа, процессор 142 определяет эффективный крутящий момент,, испытываемый редуктором 116, как функцию угла плеча 120 кривошипа при заданном угле (1008). На основании равенства угла плеча 120 кривошипа одному из TF(θ) заданных углов плеча 120 кривошипа, процессор 142 определяет связанный коэффициент момента,, справляясь с третьей таблицей 600 (этап 1010). На основании равенства угла плеча 120 кривошипа одному из заданных углов плеча 120 кривошипа, процессор 142 определяет нагрузку на полированный шток 110, используя, например, одну или более таблиц 500, 600 и 700 (этап 1012).
Если угол плеча 120 кривошипа равен одному из заданных углов плеча 120 кривошипа, процессор 142 определяет момент кручения двигателя 114 при заданном угле, используя, например, четвертый датчик 146 (этап 1006). В некоторых примерах четвертый датчик 146 представляет собой привод с бесступенчатым регулированием скорости (variable speed drive, VSD). На основании равенства угла плеча 120 кривошипа одному из TNP заданных углов плеча 120 кривошипа, процессор 142 определяет эффективный крутящий момент,, испытываемый редуктором 116, как функцию угла плеча 120 кривошипа при заданном угле (1008). На основании равенства угла плеча 120 кривошипа одному из TF(θ) заданных углов плеча 120 кривошипа, процессор 142 определяет связанный коэффициент момента,, справляясь с третьей таблицей 600 (этап 1010). На основании равенства угла плеча 120 кривошипа одному из заданных углов плеча 120 кривошипа, процессор 142 определяет нагрузку на полированный шток 110, используя, например, одну или более таблиц 500, 600 и 700 (этап 1012).
[0066] На этапе 1014 процессор 142 определяет, были ли определены коэффициенты момента для каждого из заданных углов плеча 120 кривошипа. Если определены не все из коэффициентов момента заданных углов плеча 120 кривошипа, способ по фиг. 10 возвращается к этапу 1002.
[0067] Если определены все из коэффициентов момента заданных углов плеча 120 кривошипа, процессор 142 вычисляет угол сдвига фаз противовеса, используя, например, уравнение 8 (этап 1016). Затем процессор 142 может вычислять максимальный момент кручения противовеса, М, используя, например, уравнение 13 (этап 1018). В некоторых случаях для определения угла сдвига фаз и/или максимального момента кручения противовеса постоянно отслеживается по меньшей мере один ход насосной установки 100.
[0068] Фиг. 11 представляет блок-схему примера процессорной платформы 1100, способной выполнять команды для осуществления способов по фиг. 7-10, для осуществления устройства 129 по фиг. 1. Процессорная платформа 1100 может быть, например, сервером, персональным компьютером, мобильным устройством (например, сотовым телефоном, смартфоном, планшетом, таким как iPad™), персональным цифровым секретарем (personal digital assistant, PDA), устройством для доступа к Интернету или любым другим типом вычислительного устройства.
[0069] Процессорная платформа 1100 в показанном примере содержит процессор 1112. Процессор 1112 в показанном примере представляет собой аппаратное средство. Например, процессор 1112 может быть реализован с помощью одной или более интегральных схем, логических схем, микропроцессоров или контроллеров любого желаемого семейства или производителя.
[0070] Процессор 1112 в показанном примере содержит локальную память 1113 (например, кэш-память). Процессор 1112 в показанном примере поддерживает связь с основной памятью, содержащей энергозависимую память 1114 и энергонезависимую память 1116, с помощью шины 1118. Энергозависимая память 1114 может быть реализована с помощью синхронной динамической оперативной памяти (SDRAM), динамической памяти с произвольным доступом (DRAM), динамической оперативной памяти RAMBUS (RDRAM) и/или с помощью любого другого типа оперативного запоминающего устройства. Энергонезависимая память 1116 может быть реализована с помощью флеш-памяти и/или любого другого типа запоминающего устройства. Доступ к основной памяти 1114, 1116 контролируется с помощью контроллера памяти.
[0071] Процессорная платформа 1100 показанного примера также содержит схему 1120 интерфейса. Схема 1120 интерфейса может быть реализована с помощью любого типа стандартного интерфейса, например, интерфейса Ethernet, универсальной последовательной шины (USB), и/или интерфейса PCI express.
[0072] В показанном примере одно или более устройств ввода 1122 соединено со схемой интерфейса 1120. Устройство (устройства) 1122 ввода позволяет (позволяют) пользователю вводить данные и команды в процессор 1012. Устройство (устройства) ввода могут быть реализованы, например, с помощью аудиосенсора, микрофона, клавиатуры, кнопки, мыши, сенсорного экрана, сенсорной площадки, шарового манипулятора, светового пера и/или системы распознавания речи.
[0073] Одно или больше устройств 1124 вывода также соединено со схемой интерфейса 1120 показанного примера. Устройства вывода 1024 могут быть реализованы, например, с помощью устройств отображения (например, светоизлучающего диода (LED), органического светоизлучающего диода (OLED), жидкокристаллического дисплея, дисплея с электронно-лучевой трубкой (CRT), сенсорного экрана, сенсорного устройства вывода, светоизлучающего диода (LED), принтера и/или динамиков). Схема 1120 интерфейса в показанном примере, таким образом, обычно содержит карту графического драйвера, микросхему графического драйвера или процессор графического драйвера.
[0074] Схема интерфейса 1120 в показанном примере также содержит устройство связи, такое как передатчик, приемник, приемопередатчик, модем и/или сетевая интерфейсная плата, для осуществления обмена данными с внешними машинами (например, вычислительными устройствами любого вида) через сеть 1126 (например, Ethernet-соединение, цифровую абонентскую линию связи (DSL), телефонную линию, коаксиальный кабель, систему сотовой телефонной связи, и др.).
[0075] Процессорная платформа 1100 в показанном примере также содержит одно или несколько запоминающих устройств 1128 для хранения программ и/или данных. Примеры таких запоминающих устройств 1128 содержат накопители на гибких дисках, накопители на жестких дисках, накопители на компакт-дисках, накопители на дисках Blu-ray, системы RAID и накопители на универсальных цифровых дисках (DVD).
[0076] Кодированные команды 1132 для осуществления способов по фиг. 7-10 могут храниться в запоминающем устройстве 1128, в энергозависимой памяти 1114, в энергонезависимой памяти 1116 и/или на съемном материальном читаемом компьютером носителе информации таком как CD или DVD.
[0077] Несмотря на то, что в данном документе раскрыты определенные примеры способов, устройств и готовых изделий, область действия данного патента ими не ограничивается. Напротив, настоящий патент охватывает все способы, устройства и изделия, объективно подпадающие в объем защиты, определяемый формулой настоящего изобретения.

Изобретение относится к добыче углеводородов и/или текучих сред и может быть использовано в способах и устройствах для определения параметров насосной установки при использовании в скважинах. Устройство содержит корпус и процессор, установленный в корпусе. Процессор выполнен с возможностью определения первой нагрузки на полированный шток насосной установки для оценки первого момента кручения двигателя насосной установки и определения первого коэффициента момента для насосной установки. Процессор может быть выполнен с возможностью определения угла сдвига фаз противовеса насосной установки или момента противовеса на основании первой нагрузки, первого момента кручения и первого коэффициента момента. Увеличивается срок службы. 3 н. и 17 з.п. ф-лы, 11 ил.
1. Устройство для определения эксплуатационных параметров насосной установки для использования в скважинах, содержащее:
средства определения нагрузки, выполненные с возможностью определения первой нагрузки на полированный шток насосной установки;
средства оценки момента кручения, выполненные с возможностью оценки первого момента кручения двигателя насосной установки;
средства определения коэффициента момента, выполненные с возможностью определения первого коэффициента момента для насосной установки, при этом первый коэффициент момента включает в себя скорость изменения положения полированного штока относительно угла плеча кривошипа насосной установки;
первые средства определения угла сдвига фаз, выполненные с возможностью определения угла сдвига фаз противовеса в насосной установке или момента противовеса на основании первой нагрузки, первого момента кручения и первого коэффициента момента.
2. Устройство по п. 1, дополнительно содержащее вторые средства определения угла сдвига фаз, выполненные с возможностью определения другого угла сдвига фаз противовеса в насосной установке или момента противовеса.
3. Устройство по п. 1, в котором средства определения коэффициента момента выполнены с возможностью определения коэффициента момента, используя справочную таблицу.
4. Устройство по п. 3, дополнительно содержащее:
средства перемещения, выполненные с возможностью перемещения полированного штока на протяжении первого цикла насосной установки, используя двигатель;
первые средства определения значений числа импульсов, выполненные с возможностью определения первых значений числа импульсов двигателя на протяжении первого цикла, используя первый датчик в первые моменты, при этом первые моменты распределены по существу с равными промежутками;
первые средства определения значений положения, выполненные с возможностью определения первых значений положения полированного штока на протяжении первого цикла, используя второй датчик в первые моменты;
средства связывания, выполненные с возможностью связывания первых значений числа импульсов с соответствующими значениями из первых значений положения для калибровки процессора насосной установки, и
средства создания, выполненные с возможностью создания справочной таблицы с использованием первых значений числа импульсов и первых значений положения, полученных в первые моменты, для отображения корреляции между первыми значениями числа импульсов и первыми значениями положения.
5. Устройство по п. 4, дополнительно содержащее средства определения нулевого углового положения, выполненные с возможностью определения по существу нулевого углового положения плеча кривошипа и определения соответствующих углов плеча кривошипа при первых значениях положения.
6. Устройство по п. 1, в котором первый коэффициент момента связан с первым заданным углом плеча кривошипа.
7. Устройство по п. 6, дополнительно содержащее вторые средства определения коэффициента момента, выполненные с возможностью определения второго коэффициента момента, связанного со вторым заданным углом плеча кривошипа, при этом угол сдвига фаз дополнительно определяется на основании второго коэффициента момента.
8. Устройство формирования эксплуатационного параметра насосной установки, содержащее:
контроллер, выполненный с возможностью определения первого коэффициента момента насосной установки путем определения корреляции между значениями числа импульсов двигателя, используя первый датчик, и положением полированного штока, используя второй датчик, при этом коэффициент момента включает в себя скорость изменения положения полированного штока насосной установки в отношении к углу плеча кривошипа насосной установки.
9. Устройство по п. 8, в котором контроллер дополнительно выполнен с возможностью определения первой нагрузки на полированный шток насосной установки на основании корреляции между значениями числа импульсов двигателя и положением полированного штока.
10. Устройство по п. 9, в котором контроллер дополнительно выполнен с возможностью оценки первого момента кручения двигателя насосной установки.
11. Устройство по п. 10, в котором контроллер выполнен с возможностью определения угла сдвига фаз противовеса в насосной установке на основании первой нагрузки, первого момента кручения и первого коэффициента момента или момента противовеса на основании угла сдвига фаз.
12. Устройство по п. 11, в котором контроллер дополнительно выполнен с возможностью определения другого угла сдвига фаз противовеса в насосной установке или момента противовеса.
13. Устройство по п. 10, в котором первый коэффициент момента основан на первом угле плеча кривошипа.
14. Устройство по п. 10, в котором контроллер выполнен с возможностью определения коэффициента момента, используя справочную таблицу.
15. Устройство по п. 14, в котором создание справочной таблицы включает в себя:
перемещение контроллером полированного штока на протяжении первого цикла насосной установки, используя двигатель;
определение контроллером первых значений числа импульсов двигателя на протяжении первого цикла, используя первый датчик в первые моменты, при этом первые моменты распределены по существу с равными промежутками;
определение контроллером первых значений положения полированного штока на протяжении первого цикла, используя второй датчик в первые моменты;
связывание контроллером первых значений числа импульсов с соответствующими значениями из первых значений положения для калибровки процессора насосной установки, и
создание контроллером справочной таблицы с использованием первых значений числа импульсов и первых значений положения, полученных в первые моменты, для отображения корреляции между первыми значениями числа импульсов и первыми значениями положения.
16. Устройство для определения эксплуатационных параметров насосной установки, содержащее:
корпус и
процессор, установленный в корпусе и выполненный с возможностью определения первой нагрузки на полированный шток насосной установки, для оценки первого момента кручения двигателя насосной установки, и определения первого коэффициента момента насосной установки, при этом процессор выполнен с возможностью определения угла сдвига фаз противовеса насосной установки или момента противовеса на основании первой нагрузки, первого момента кручения и первого коэффициента момента.
17. Устройство по п. 16, в котором процессор также выполнен с возможностью определения другого угла сдвига фаз противовеса или момента противовеса.
18. Устройство по п. 16, в котором процессор выполнен с возможностью определения коэффициента момента, используя справочную таблицу.
19. Устройство по п. 18, в котором процессор выполнен с возможностью создания таблицы на основании корреляции между значениями числа импульсов двигателя, используя первый датчик, и положением полированного штока.
20. Устройство по п. 16, в котором процессор выполнен с возможностью связывания первого коэффициента момента с первым заданным углом плеча кривошипа.
| US 3029650 A, 17.04.1962 | |||
| US 2014129037 A1, 08.05.2014 | |||
| US 5204595 A, 20.04.1993 | |||
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ ШТОКА В СИСТЕМЕ ОТКАЧКИ ФЛЮИДА ИЗ СКВАЖИНЫ | 2005 |
|
RU2381384C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ УРАВНОВЕШЕННОСТИ ПРИВОДА ШТАНГОВОГО ГЛУБИННОГО НАСОСА | 2007 |
|
RU2334897C1 |

