ОБЛАСТЬ ТЕХНИКИ
[001] Данное изобретение относится в целом к контроллерам штанговых глубинных насосов и, более конкретно, к способам и устройству для попарного сопоставления положения контроллера штангового глубинного насоса и значений нагрузки.
УРОВЕНЬ ТЕХНИКИ
[002] Насосные установки используются для обеспечения функционирования скважинных насосов, которые откачивают нефть из нефтяной скважины. В некоторых случаях контроллер штангового глубинного насоса собирает данные во время работы насосной установки для создания динамометрических карт, которые помогают определять характеристики насосных установок и связанных с ними компонентов.
КРАТКОЕ ОПИСАНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[003] Типовой способ, описанный в данном документе, включает в себя определение, с помощью контроллера штангового глубинного насоса, первого значения положения полированного штока насосной установки, присваивание первого значения времени определенному первому значению положения, получение первых значений нагрузки на полированный шток, присваивание вторых значений времени соответствующим первым значениям нагрузки, корректирование каждого из вторых значений времени до соответствующих третьих значений времени на основании значения задержки беспроводной связи и определение второго значения нагрузки, связанного с первым значением положения при первом значении времени на основании первых значений нагрузки и третьих значений времени.
[004] Типовой контроллер штангового глубинного насоса включает в себя первый процессор для того, чтобы: определить, с помощью контроллера штангового глубинного насоса, первое значение положения полированного штока насосной установки; присвоить первое значение времени первому значению положения; получить первые значения нагрузки на полированный шток; присвоить вторые значения времени соответствующим первым значениям нагрузки; скорректировать каждое из вторых значений времени до соответствующих третьих значений времени на основании значения задержки беспроводной связи; и определить второе значение нагрузки, связанное с первым значением положения при первом значении времени на основании первых значений нагрузки и третьих значений времени.
[005] Типовой материальный считываемый компьютером носитель данных содержит команды, которые при выполнении заставляют машину: определить, с помощью контроллера штангового глубинного насоса, первое значение положения полированного штока насосной установки; присвоить первое значение времени первому значению положения; получить первые значения нагрузки на полированный шток; присвоить вторые значения времени соответствующим первым значениям нагрузки; скорректировать каждое из вторых значений времени до третьих значений времени на основании значения задержки беспроводной связи и определить вторые значения нагрузки, связанные с первым значением положения при первом значении времени на основании первых значений нагрузки и третьих значений времени.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
[006] На Фиг. 1 изображена насосная установка, включающий в себя типовое устройство в соответствии с принципами данного изобретения.
[007] На Фиг. 2 изображена типовая временная последовательность для проведения выборочных замеров и получения значений нагрузки и значений положения полированного штока известной насосной установки.
[008] На Фиг. 3А изображена типовая таблица справочных данных, сгенерированная до того, как типовое устройство, изображенное на Фиг. 1, синхронизировано и значения нагрузки и положения полированного штока сопряжены.
[009] На Фиг. 3В изображена другая типовая таблица справочных данных, сгенерированная типовым устройством, показанным на Фиг. 1, с учетом задержки беспроводной связи.
[0010] На Фиг. 3С изображена типовая таблица справочных данных, сгенерированная типовым устройством, показанным на Фиг. 1, в соответствии с принципами данного изобретения.
[0011] На Фиг. 4-7 изображены блок-схемы, представляющие типовые способы, которые могут быть использованы для реализации типового устройства, показанного на Фиг. 1.
[0012] На Фиг. 8 изображена процессорная платформа для реализации способов, показанных на Фиг. 4-7 и/или устройства, показанного на Фиг. 1.
[0013] Фигуры представлены не в реальном масштабе. Там, где это возможно, одни и те же ссылочные номера будут использоваться по всему графическому материалу (графическим материалам) и сопроводительному письменному описанию для обозначения тех же или подобных частей.
ПОДРОБНОЕ ОПИСАНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0014] Насосные установки или системы штанговых глубинных насосов с возвратно-поступательным движением часто используют диагностические устройства или динамометрические карты для определения или анализа эксплуатационных характеристик. Динамометрическая карта насоса предоставляет данные о положении в сопоставлении со временем, данные о нагрузке в сопоставлении со временем, а также данные о нагрузке в сопоставлении с положением, определяемые путем сбора данных, связанных с насосной установкой во время работы и/или путем использования математической модели или волнового уравнения. Для повышения точности динамометрических карт насоса значения нагрузки на полированный шток и значения положения полированного штока измеряются при относительно высокой частоте (например, более 20 Гц). Кроме того, для обеспечения точности генерируемых динамометрических карт, определенная измеренная нагрузка (например, сила), переданная на полированный шток, должна коррелировать или быть сопряжена (например, синхронизирована) с измеренным положением хода полированного штока. Несоблюдение соотношения или попарного сопоставления измеренной нагрузки с положением хода полированного штока, при котором измерялась нагрузка, может привести к неточным данным и, следовательно, к неточным динамометрическим картам. Таким образом, синхронизация значений нагрузки и значений положения полированного штока значительно повышает точность динамометрической карты насоса.
[0015] В некоторых насосных установках используется тензометрический динамометр, установленный на полированном штоке, для измерения нагрузки на полированном штоке, и датчик положения для определения положения полированного штока. Тензометрический динамометр и/или датчик положения часто соединяется с контроллером штангового глубинного насоса с помощью проводное соединение с использованием кабеля передачи данных. В результате проводного соединения контроллер штангового глубинного насоса получает измеренное значение нагрузки по существу одновременно с обнаружением положения полированного штока, соответствующего измеренному значению нагрузки. В результате первое значение положения полированного штока при первом времени проведения выборочных замеров и первое значение нагрузки на полированном штоке при первом времени проведения выборочных замеров должным образом попарно сопоставляются, так как фактически нет запаздывания, что связанно с проводным соединением. Кроме того, при проводном соединении контроллер штангового глубинного насоса определяет частоту проведения выборочных замеров значений нагрузки и значений положения с использованием отдельного таймера, тем самым устраняя проблемы, связанные со смещением характеристик таймера. Однако проводное соединение или кабель часто повреждаются, так как кабель проводного соединения подвергается повторяющемуся перемещению, которое может привести к излому кабеля. В результате, тензометрические динамометры полированного штока, соединенные с контроллером штангового глубинного насоса с помощью проводного соединения часто требуют более тщательного технического обслуживания.
[0016] Для того чтобы облегчить техническое обслуживание, связанное с проводным соединением между тензометрическим динамометром и контроллером штока насоса, некоторые известные насосные установки используют канал беспроводной связи для передачи значений нагрузки, измеренных тензометрическим динамометром, контроллеру штока насоса. Однако беспроводная передача сигнала тензометрического динамометра вводит временные задержки (например, задержку беспроводной связи и смещение характеристик таймера). Например, беспроводная связь часто включает в себя задержку беспроводной связи между временем, когда сигнал передается по каналу беспроводной связи, и временем, когда сигнал принимается контроллером штангового глубинного насоса. В результате первое значение нагрузки на полированный шток при первом времени проведения выборочных замеров принимается контроллером штангового глубинного насоса в момент времени, который смещен относительно момента времени, в который измеряется или определяется значение положения полированного штока. Кроме того, в некоторых примерах частота проведения выборочных замеров для получения значений положения полированного штока управляется первым таймером, а частота проведения выборочных замеров для получения значений нагрузки на полированный шток управляется вторым таймером. Хотя первый и второй таймеры могут быть первоначально синхронизированы, смещение характеристик первого таймера часто отличается от смещения характеристик второго таймера, что приводит к тому, что частота проведения выборочных замеров первого таймера отличается от частоты проведения выборочных замеров второго таймера. Смещение характеристик может привести к тому, что полученные выборочные замеры будут более смещенными (например, переменное смещение по сравнению с постоянным смещением), чем если бы они были смещены в ином случае - из-за задержки беспроводной связи между каналом беспроводной связи и контроллером штангового глубинного насоса. Таким образом, смещение характеристик таймеров может привести к смещению переменной, которое может быть трудно определить при сопряжении значений положения полированного штока с значениями нагрузки на полированный шток.
[0017] В результате сигнал тензометрического динамометра, создаваемый тензометрическим динамометром, когда полированный шток находится в конкретном положении хода, может не соответствовать положению хода полированного штока, определяемому контроллером штангового глубинного насоса. Другими словами, контроллер штангового глубинного насоса может получать или определять значение положения полированного штока в первый момент времени, а контроллер штангового глубинного насоса может принимать измеренное значение нагрузки с помощью канала беспроводной связи, соответствующее положению полированного штока во второй момент времени, иное, чем в первый момент времени. В результате измеренные значения нагрузки не синхронизированы или не сопряжены с истинными значениями положения полированного штока. Как отмечалось выше, неспособность правильно согласовать измеренные значения нагрузки с соответствующим значением положения полированного штока вызывает неточности при создании динамометрической карты насоса. Чтобы уменьшить задержку между сигналами тензометрического динамометра и сигналами положения, соответствующими сигналам нагрузки, некоторые типовые устройства оцифровывает аналоговый сигнал тензометрического динамометра (например, милливольтовый уровневый сигнал) и передают цифровой сигнал на приемник контроллера штока насоса. Получение может преобразовать цифровой сигнал обратно в аналоговый сигнал. Однако такой подход может привести к неточностям, обусловленным, например, коэффициентом преобразования (например, коэффициентом преобразования мощности).
[0018] Способы и устройство, описанные в данном документе, идентифицируют или определяют положения полированного штока на протяжении всего хода насосной установки и коррелируют и/или определяют соответствующие нагрузки, переданные на полированный шток при положениях полированного штока. Другими словами, описанные в данном документе типовые способы и устройство синхронизируют и/или попарно сопоставляют определенные значения положения полированного штока с истинными соответствующими или соответственными значениями измеренных нагрузок, передаваемых на полированный шток в положениях полированного штока. В частности, описанные в данном документе типовые способы и устройство учитывают временные задержки между переданным по беспроводному каналу сигналом нагрузки (например, который соответствует силе, переданной на полированный шток) и соответствующим сигналом положения (например, который соответствует положению полированного штока, при измерении нагрузки на полированный шток). Таким образом, описанные в данном документе типовые способы и устройство синхронизируют и/или попарно сопоставляют значения нагрузки на полированный шток и значения положения полированного штока. Без компенсации задержки передачи, как описано в данном документе для данного положения полированного штока, измеренное значение положения полированного штока может быть неточно связано с измеренной нагрузкой.
[0019] Чтобы синхронизировать и/или попарно сопоставить значения нагрузки и значения положения, описанные в данном документе типовые способы и устройство получают значения положения и значения нагрузки на полированный шток с одинаковой частотой проведения выборочных замеров (например, 20 Гц). Например, датчик положения обеспечивает значения измерений положения полированного штока при частоте проведения выборочных замеров, которая аналогична частоте проведения выборочных замеров, при которой тензодатчик или тензометрический динамометр получает значения нагрузки на полированный шток. Чтобы обеспечить аналогичную частоту проведения выборочных замеров, описанные в данном документе типовые способы и устройство используют первый таймер, связанный с датчиком положения, и второй таймер, связанный с датчиком нагрузки. Чтобы значительно уменьшить смещение характеристик, связанное с таймерами, описанные в данном документе типовые способы и устройство через определённые промежутки времени (например, примерно каждые 100 миллисекунд) синхронизируют таймеры. Кроме того, описанные в данном документе типовые способы и устройство оценивают среднюю задержку времени, вызванную каналом беспроводной связи (например, системой передачи радиосигналов).
[0020] Во время работы типовой контроллер штангового глубинного насоса определяет и/или принимает значения измерений положения полированного штока в сопоставлении со временем и значения измерений нагрузки в сопоставлении со временем. Контроллер штангового глубинного насоса смещает или изменяет значения измерений нагрузки в сопоставлении со временем на расчетную среднюю задержку времени, вызванную каналом беспроводной связи. Когда скорректированные значения времени принятых значений нагрузки не соответствуют значениям времени принятых значений положения, описанные в данном документе примеры и устройство определяют значения нагрузки, связанные со значениями положения в сопоставлении со временем. Альтернативно, описанные в данном документе типовые способы и устройство определяют значения положения, связанные с нагрузкой в сопоставлении со смещенные значениями времени.
[0021] Принимая во внимание задержку передачи по беспроводному каналу и смещение характеристик таймера, описанные в данном документе типовые способы и устройство математически определяют или попарно сопоставляют значения измерений нагрузки и значения измерений положения на основании принятых значений нагрузки в сопоставлении со временем корректировки и значений положения в сопоставлении со временем. Некоторые типовые способы и устройства, описанные в данном документе, для связывания измеренной нагрузки на полированном штоке с положением полированного штока используют интерполяцию. Например, типовой контроллер штангового глубинного насоса, описанный в данном документе, математически определяет значения нагрузки, соответствующие соответственным значениям положения полированного штока, которые определяются или принимаются контроллером насосной установки. В некоторых примерах типовой контроллер штангового глубинного насоса, описанный в данном документе, математически определяет значения положения, соответствующие соответственным значениям нагрузки на полированный шток, которые принимаются контроллером штангового глубинного насоса.
[0022] На Фиг. 1 показана насосная установка 100, которая может быть использована для добычи нефти из нефтяной скважины 102. Насосная установка 100 включает в себя раму 104, стойку 106 станка-качалки и качающуюся штангу 108 станка-качалки. Качающаяся штанга 108 станка-качалки может использоваться для возвратно-поступательного перемещения полированного штока 110 относительно нефтяной скважины 102 с помощью подвески 112. Насосная установка 100 включает в себя двигатель или мотор 114, который приводит в движение систему 116 ремня и шкива, чтобы вращать зубчатый привод 118 и, в свою очередь, поворачивать плечо 120 кривошипа и противовес 121. Шатун 122 станка-качалки соединен между плечом 120 кривошипа и качающейся штангой 108 станка-качалки таким образом, что вращение плеча 120 кривошипа перемещает шатун 122 станка-качалки и качающуюся штангу 108 станка-качалки. Когда качающаяся штанга 108 станка-качалки поворачивается вокруг точки поворота и/или опорного подшипника 124, качающаяся штанга 108 станка-качалки перемещает балансир 126 штангового насоса и полированный шток 110.
[0023] Чтобы обнаружить, когда плечо 120 кривошипа завершает цикл и/или проходит конкретное угловое положение, первый датчик 128 подсоединен в непосредственной близости к плечу 120 кривошипа. Для обнаружения и/или контроля количества оборотов двигателя 114 за единицу времени, второй датчик 130 подсоединен в непосредственной близости к двигателю 114. Данные, полученные от первого датчика 128 и/или второго датчика 130, могут использоваться для определения (например, измерения или получения) положения полированного штока 110 на протяжении всего хода насосной установки 100.
[0024] Для измерения или обнаружения нагрузки (например, силы), приложенной к полированному штоку 110 во время работы, типовая насосная установка 100 использует узел 132 измерения нагрузки. Узел 132 измерения нагрузки включает в себя тензодатчик 134 (например, тензометрический динамометр) и устройство 136 беспроводной связи (например, соединенное с помощью кабеля 164). Тензометрический динамометр 134 расположен или соединен с полированным штоком 110, а устройство 136 беспроводной связи передает информацию о нагрузках, измеренных тензодатчик 134, к контроллеру 138 штангового глубинного насоса. В проиллюстрированном примере передача информации между контроллером 138 штангового глубинного насоса и устройством 136 беспроводной связи может быть выполнена, например, с помощью радиочастотной связи. Например, приемопередатчики 156 и 146 соответствующего контроллера 138 штангового глубинного насоса и устройство 136 беспроводной связи обеспечивают передачу информации между контроллером 138 штангового глубинного насоса и устройством 136 беспроводной связи. Например, передача информации между устройством 136 беспроводной связи и контроллером 138 штангового глубинного насоса может быть установлена с помощью 2-канальной беспроводной сети с высокой скоростью пропускания (например, 57600 Бод или выше) или коммуникационного канала. В некоторых примерах передача информации между устройством 136 беспроводной связи и контроллером 138 штангового глубинного насоса может быть установлена с помощью одноканальной беспроводной сети с высокой скоростью пропускания или коммуникационного канала, когда, например, устройство 136 беспроводной связи включает в себя главный таймер 152, а контроллер 138 штангового глубинного насоса включает в себя синхронизируемый таймер 142.
[0025] Устройство 136 беспроводной связи проиллюстрированного примера включает в себя процессор 140, синхронизируемый таймер 142, интерфейс 144 ввода/вывода, приемопередатчик 146 и интерфейс хранения или запоминающее устройство 148. Данные, полученные от тензодатчика 134 (например, тензометрического динамометра), принимаются устройством 144 ввода/вывода (I/O) и могут быть сохранены в запоминающем устройстве 148, доступном процессору 140. Например, во время работы процессор 140 получает значения нагрузки от тензодатчика 134 в течение периода проведения выборочных замеров (например, каждые 50 миллисекунд, каждую секунду и т.д.). В некоторых примерах процессор 140 и/или тензодатчик 134 используют синхронизируемый таймер 142 для определения периода проведения выборочных замеров и/или для определения того, когда запрашивать, отправлять и/или получать данные (например, измеренные значения нагрузки) от тензодатчика 134. В некоторых примерах процессор 140 также использует синхронизируемый таймер 142, чтобы определить, когда отправлять данные (например, измеренные значения нагрузки) в контроллер 138 штангового глубинного насоса.
[0026] Контроллер 138 штангового глубинного насоса проиллюстрированного примера включает в себя процессор 150, главный таймер 152, интерфейс 154 ввода/вывода, приемопередатчик 156, интерфейс хранения или запоминающее устройство 158 и тактовый генератор 159. Данные, полученные от первого и второго датчиков 128 и 130, принимаются устройством 154 ввода/вывода (I/O) контроллера 138 штангового глубинного насоса и сохраняются в запоминающем устройстве 158, доступном процессору 150. Например, во время работы процессор 150 получает и/или практически одновременно получает в течение периода проведения выборочных замеров (например, каждые 50 миллисекунд, каждую секунду и т.д.) количество импульсов кривошипа и/или ритм от первого датчика 128, количество импульсов двигателя в сопоставлении со временем и/или ритм от второго датчика 130. В некоторых примерах процессор 150 и/или первый и второй датчики 128 и 130 используют главный таймер 152 для определения периода проведения выборочных замеров и/или для определения, когда запрашивать, отправлять и/или принимать данные (например, измеренные значения параметров) от первого и второго датчиков 128 и 130.
[0027] В процессе работы контроллер 138 штангового глубинного насоса измеряет или делает заключение про положение полированного штока 110, когда насосная установка 100 перемещается на протяжении цикла хода, на основании значений сигнала, обеспечиваемых первым датчиком 128 и/или вторым датчиком 130. Контроллер 138 штангового глубинного насоса принимает значения нагрузки на полированный шток 110, когда полированный шток 110 перемещается на протяжении цикла хода. Однако временная задержка между передачей значения нагрузки от устройства 136 беспроводной связи и получением переданного значения нагрузки контроллером 138 штангового глубинного насоса может привести к тому, что временная отметка соответствующего значения положения будет отличаться от временной отметки принятого значения нагрузки, что приводит к неточному попарному сопоставлению значения положения и значения нагрузки.
[0028] Например, Фиг. 2 изображает временную последовательность 200 для проведения выборочных замеров и получения значений нагрузки и значений положения в контроллере 138 штангового глубинного насоса. Первый набор протоколов 202, 204 и 206 может быть получен в конкретный день или конкретное время. В последовательности, представленной протоколами 202, 204 и 206, нагрузка 208 измеряется устройством 136 беспроводной связи в момент времени TML. Как отмечено выше, устройство 136 беспроводной связи запрограммировано на считывание и передачу замеров с определенной частотой, например, каждые 50 миллисекунд. Контроллер 138 штангового глубинного насоса измеряет положение 210 полированного штока 110 в момент времени TMP. После определенного промежутка времени (например, задержки 212 беспроводной связи или задержки передачи) контроллер 138 штангового глубинного насоса принимает измеренную нагрузку 214 от устройства 136 беспроводной связи в момент времени TRL.
[0029] Второй набор протоколов 216, 218 и 220 представляет собой набор, соответствующий другому дню и/или моменту времени по отношению к первому набору протоколов 202, 204 и 206. В последовательности, представленной протоколами 216-220, нагрузка 208 измеряется устройством 136 беспроводной связи, положение 210 полированного штока 110 измеряется контроллером 138 штангового глубинного насоса, а измеренная нагрузка 214 принимается контроллером 138 штангового глубинного насоса. В проиллюстрированном примере частота проведения выборочных замеров для положения и нагрузки одинакова или по существу аналогична (например, каждые 50 миллисекунд). Как показано сравнением протоколов 202-206 и 216-220, смещение характеристик и/или ошибка 222 в таймерах 142 и 152 соответственно устройства 136 беспроводной связи и контроллера 138 штангового глубинного насоса могут привести к тому, что время измеренного положения TMP и время измеренной нагрузки TML (например, частота проведения выборочных замеров), будет колебаться или значительно смещаться с течением времени. Таким образом, несмотря на то, что задержка 212 беспроводной связи может быть постоянной, смещение характеристик 222 таймера является переменным значением, которое влияет на задержку 212 беспроводной связи. Например, хотя смещение характеристик таймера может быть постоянным в течение нескольких последовательных циклов хода насосной установки 100, смещение 222 характеристик таймера между главным таймером 152 и синхронизируемым таймером 142 может значительно смещаться с течением времени (например, после четырех или шести последовательных циклов хода насосной установки 100), тем самым вызывая неточности в периоде проведения выборочных замеров или частоте. Например, смещение 222 характеристик таймера для известных кварцевых генераторов может привести к смещению характеристик часов в 10 миллионных долей (м.д.) или более. Такое смещение характеристик таймера может происходить в главном таймере 152, синхронизируемом таймере 142 и/или как в главном таймере 152, так и в синхронизируемом таймере 142. Например, погрешность величины в 10 м.д. может привести к смещению характеристик таймера в 0,85 секунды/день. В некоторых таких примерах период проведения выборочных замеров в 50 миллисекунд может приводить к смещению характеристик таймера в 1 миллисекунду каждые 100 секунд.
[0030] Типовой контроллер 138 штангового глубинного насоса, показанный на Фиг. 1, выполнен с возможностью учета временных задержек, таких как показанные, например, на Фиг. 2. Для учета вышеупомянутой задержки 212 беспроводной связи и смещения 222 характеристик таймера, показанных на Фиг. 2, типовой контроллер 138 штангового глубинного насоса выполнен с возможностью учета смещения времени между значением нагрузки, принятым контроллером 138 штангового глубинного насоса, и момента времени, в которое положение измеряется контроллером 138 штангового глубинного насоса. Типовое определение смещения может быть описано с использованием уравнения (1), приведенного ниже.
Уравнение (1): (TRL - TMP ) = (TRL - TML ) - (TMP - TML );
где TRL - момент времени, в котором результат измерения нагрузки принимается контроллером 138 штангового глубинного насоса; TMP - момент времени, когда положение измеряется контроллером 138 штангового глубинного насоса; и TML - момент времени, когда значение нагрузки было измерено устройством 136 беспроводной связи. Значение (TRL - TML) представляет собой значение, соответствующее задержке беспроводной связи или задержке передачи. Задержка беспроводной связи, например, может быть определенным значением задержки, вызванной временем передачи и трансляции между контроллером 138 штангового глубинного насоса и устройством 136 беспроводной связи. Значение (TMP - TML) представляет собой значение, соответствующее значению смещения характеристик таймера (например, значение между приблизительно нулем и частотой проведения выборочных замеров (например, 50 миллисекунд)) между главным таймером 152 и синхронизируемым таймером 142.
[0031] Для синхронизации и/или попарного сопоставления соответствующих значений положения и соответствующих значений нагрузки задержка беспроводной связи (TRL - TML) определяется как постоянное значение (например, с помощью процесса калибровки), а задержки смещения характеристик таймера (TMP - TML) корректируется с помощью периодической синхронизации (например, каждые 100 секунд) между главным таймером 152 и синхронизируемым таймером 142.
[0032] Задержка беспроводной связи (TRL - TML) может быть получена с помощью экспериментальных данных, калибровки и/или других способов. Согласно Фиг. 1, в некоторых примерах задержка беспроводной связи может быть определена с помощью процесса калибровки. В некоторых примерах устройство 136 беспроводной связи, показанное на Фиг. 1, может быть откалибровано со ссылкой на вспомогательный тензодатчик 160 (например, устройство тензометрического динамометра), который временно подключен с помощью кабеля 162 к контроллеру 138 штангового глубинного насоса (например, до нормального режима эксплуатации насосной установки 100). Например, контроллер 138 штангового глубинного насоса принимает и/или считывает значения нагрузки на полированный шток от вспомогательного тензодатчика 160 с помощью проводного соединения, обеспечиваемого кабелем 162, и принимает и/или считывает значения нагрузки на полированный шток от тензодатчика 134, предоставленные устройством 136 беспроводной связи, в течение определенного периода времени (например, один или два полных цикла хода насосной установки 100). Данные нагрузки, предоставленные тензодатчиком 134, анализируются или сравниваются с данными нагрузки, предоставленными вспомогательным тензодатчиком 160 (например, либо процессором 150 контроллера 138 штангового глубинного насоса, либо удаленным компьютером диспетчерского пункта, связанным с возможностью передачи информации с контроллером 138 штангового глубинного насоса) для определения фазового сдвига между показаниями тензодатчика 134 и соответствующими показаниями нагрузки, предоставленными вспомогательным тензодатчиком 160. По завершении процесса калибровки вспомогательный тензодатчик 160 и кабель 162 отсоединяются от насосной установки 100 и/или полированного штока 110 и может начаться нормальный режим эксплуатации и/или непрерывный режим эксплуатации насосной установки 100.
[0033] В некоторых примерах устройство 136 беспроводной связи, показанное на Фиг. 1, может быть откалибровано без использования вспомогательного тензодатчика 160 (например, устройства тензометрического динамометра). В некоторых таких примерах устройство 136 беспроводной связи соединено с возможностью передачи информации с тензодатчиком 134 с помощью провода или кабеля 164 и интерфейса 144 ввода/вывода, а устройство 136 беспроводной связи соединено с возможностью передачи информации с контроллером 138 штангового глубинного насоса с помощью временного кабеля или провода 166 (например, «временного» означает - до нормального режима эксплуатации насосной установки 100) и интерфейса 154 ввода-вывода. В некоторых таких примерах устройство 136 беспроводной связи может быть выполнено с возможностью излучать сигнал, принятый от тензодатчика 134, с помощью устройства вывода интерфейса 144 ввода/вывода и приемопередатчика 146. Для завершения процесса калибровки устройство 136 беспроводной связи передает сигнал, предоставляемый тензодатчиком 134, на контроллер 138 штангового глубинного насоса по беспроводной сети с помощью приемопередатчика 146 и проводного устройства вывода с помощью проводного соединения, обеспечиваемого временным кабелем 166. Например, контроллер 138 штангового глубинного насоса принимает и/или считывает одно и то же значение нагрузки на полированный шток от тензодатчика 134, предоставляемое с помощью проводное соединения, обеспечиваемого кабелем 166, и приемопередатчика 146. Временное различие между данными нагрузки, представленными тензодатчиком 134 с помощью проводного соединения, обеспечиваемого кабелем 166, и беспроводным сигналом, обеспечиваемым приемопередатчиком 146, анализируется или сравнивается для определения задержки беспроводной связи, имеющейся между устройством беспроводной связи 136 и контроллером 138 штангового глубинного насоса. По завершении процесса калибровки кабель 166 отсоединяется от насосной установка 100 и может начаться нормальный режим эксплуатации и/или непрерывный режим эксплуатации насосной установки 100.
[0034] В некоторых примерах устройство 136 беспроводной связи, показанное на Фиг. 1, может быть откалибровано без использования тензометрического динамометра 134 и/или вспомогательного тензодатчика 160 (например, устройства тензометрического динамометра). Таким образом, в некоторых таких примерах временный кабель 162 не требуется, когда вспомогательный тензодатчик 160 не используется. Во время процесса калибровки устройство 136 беспроводной связи может быть переведено в режим калибровки с помощью, например, кнопки в устройстве 136 беспроводной связи и/или калибровочного сигнала, подаваемого контроллером 138 штангового глубинного насоса. Устройство 136 беспроводной связи может быть выполнено с возможностью излучать (например, как норма) сигнал по беспроводной сети с помощью приемопередатчика 146 и с помощью проводного соединения, обеспечиваемого временным проводом или кабелем 166 (то есть без использования временного провода или кабеля 162). Например, устройство 136 беспроводной связи может излучать колебательный сигнал (например, стандартный колебательный сигнал, синусоидальный волновой сигнал с частотой от 30 Гц до 60 Гц, пилообразный волновой сигнал, прямоугольный волновой сигнал и т.д.). Такой сигнал может излучаться или посылаться одновременно контроллеру 138 штангового глубинного насоса по беспроводной сети с помощью приемопередатчика 146 и с помощью проводного соединения, обеспечиваемого временным кабелем 166, соединяющим интерфейс 144 ввода/вывода устройства 136 беспроводной связи и интерфейс 154 ввода/вывода контроллера 138 штангового глубинного насоса. Для определения задержки беспроводной передачи контроллер 138 штангового глубинного насоса может анализировать, например, сдвиг фазы (например, в секундах) или разницу между моментом времени, в который сигнал принимается с помощью приемопередатчика 156 и моментом временем, в который сигнал принимается с помощью проводного соединения, обеспечиваемого временным кабелем 166. По завершении процесса калибровки кабель 166 отсоединяется от насосной установка 100 и может начаться нормальный режим эксплуатации и/или непрерывный режим эксплуатации насосной установки 100.
[0035] Типовые способы калибровки контроллера 138 штангового глубинного насоса и устройства 136 беспроводной связи описаны прилагаемыми блок-схемами, показанными на Фиг. 6 и 7. Способы 600 калибровки, показанные на Фиг. 6 и/или 700, показанные на Фиг. 7, могут давать согласованные значения задержки беспроводной связи беспроводного устройство связи (например, устройство беспроводной связи 136) одного и того же производителя/модели при использовании с конкретным контроллером штангового глубинного насоса (например, контроллером 138 штангового глубинного насоса). Таким образом, калибровка может потребоваться только один раз, и задержка беспроводной связи может быть стандартным значением, применимым к одному и тому же производителю/модели устройства беспроводной связи и контроллерам штанговых глубинных насосов. Кроме того, другие насосные установки, которые используют контроллеры штанговых глубинных насосов и устройства беспроводной связи, аналогичные контроллерам 138 штанговых глубинных насосов и устройству 136 беспроводной связи, могут претерпевать такую же задержку беспроводной связи, и, таким образом, задержка беспроводной связи может быть получена с использованием предварительно откалиброванных данных от аналогичных насосных установок.
[0036] Смещение характеристик таймера (TRL - TMP) между результатом измерения нагрузки, предоставляемым тензодатчиком 134, и результатом измерения положения, предоставляемым контроллером 138 штангового глубинного насоса, учитывается при нормальном режиме эксплуатации насосной установки 100. В режиме эксплуатации процессор 150 и/или главный таймер 152 через определённые промежутки времени генерируют сигнал синхронизации и сообщают сигнал синхронизации устройству 136 беспроводной связи с помощью приемопередатчика 156. Например, процессор 150 может обеспечивать или транслировать сигнал синхронизации устройству 136 беспроводной связи каждые 100 секунд. Сигнал синхронизации приводит к возврату синхронизируемого таймера 142 в исходное состояние. Типовой способ синхронизации главного таймера 152 и синхронизируемого таймера 142 проиллюстрирован в типовой блок-схеме, показанной на Фиг. 5. В проиллюстрированном примере контроллер 138 штангового глубинного насоса включает в себя главный таймер 152, а устройство 136 беспроводной связи включает в себя синхронизируемый таймер 142. Однако в некоторых примерах контроллер 138 штангового глубинного насоса включает в себя синхронизируемый таймер 142, а устройство 136 беспроводной связи включает в себя главный таймер 152. Например, реализация устройства 136 беспроводной связи с главный таймером 152 требует одноканальной передача информации между устройством 136 беспроводной связи и контроллером 138 штангового глубинного насоса вместо двухканальной связи, как показано на Фиг. 1.
[0037] С определением задержки беспроводной связи и значительным уменьшением или устранением смещения характеристик таймера описанные в данном документе типовые способы и устройство учитывают временные задержки между моментом времени, когда измеренные значения нагрузки передаются устройством 136 беспроводной связи и моментом времени, когда контроллер штангового глубинного насоса 138 принимает переданные измеренные значения нагрузки, тогда как в противном случае такая временная задержка вызывает неправильное попарное сопоставление значений нагрузки и соответствующих измеренных значений положения. Как отмечалось выше, такое неправильное попарное сопоставление может привести к неточным динамометрическим картам насоса. В частности, контроллер 138 штангового глубинного насоса иллюстрируемого примера соотносит, синхронизирует и/или попарно сопоставляет математически определенные значения нагрузки на полированный шток 110 с соответствующими измеренными или полученными значениями положения полированного штока 110. Конкретно, типовой контроллер 138 штангового глубинного насоса использует измеренные значения нагрузки (например, первые значения нагрузки), предоставляемые устройством 136 беспроводной связи и (например, математически) определяет значения нагрузки (например, вторые значения нагрузки), связанные с определенными положениями полированного штока когда временные отметки принятых измеренных значений нагрузки от устройства 136 беспроводной связи не соответствуют или не коррелируют с временными отметками определенных значений положения. Например, в режиме эксплуатации контроллер 138 штангового глубинного насоса определяет (например, измеряет или получает) положение полированного штока 110 на основании сигнала, предоставляемого датчиком 128 и/или 130, и связывает определенное значение нагрузки на полированный шток 110 соответственно со значением положения полированного штока 110, когда принятое значение нагрузки не соответствует измеренному значению положения.
[0038] Например, Фиг. 3А иллюстрирует типовую таблицу 300 справочных данных справочных данных, содержащую данные о положении, предоставленные контроллером 138 штангового глубинного насоса, с использованием периода проведения выборочных замеров в 50 миллисекунд (например, частота 20 Гц) и момент времени, в котором контроллер 138 штангового глубинного насоса получает значения измерений нагрузки на полированный шток (например, первый набор значений нагрузки), переданный устройством 136 беспроводной связи, без учета задержки смещения, предоставляемого, например, уравнением (1). Подобно контроллеру 138 штангового глубинного насоса устройство 136 беспроводной связи измеряет и передает значения нагрузки на полированный шток, используя период проведения выборочных замеров в 50 миллисекунд (например, частота 20 Гц). В проиллюстрованном примере, показанном на Фиг. 3А, сигналы нагрузки на полированный шток, предоставляемые устройством 136 беспроводной связи, считываются/принимаются контроллером 138 штангового глубинного насоса приблизительно пять миллисекунд после того, как значения положения полированного штока измеряются или выводятся контроллером 138 штангового глубинного насоса.
[0039] Согласно Фиг. 3А, таблица 300 справочных данных включает в себя первый или левый столбец 302 (в ориентации, показанной на Фиг. 3А), соответствующий моменту времени в секундах измеренных или полученных значений положения полированного штока и значений нагрузки на полированные штоки, принимаемые контроллером 138 штангового глубинного насоса, второй или средний столбец 304 соответствует значениям положения полированного штока, полученным и/или определенным первым и вторым датчиками 128 и 130, а третий или правый столбец 306 соответствуют значениям нагрузки на полированный шток, полученным от и/или определенным тензодатчиком 134.
[0040] Хотя каждое из значений нагрузки на полированный шток считывается или принимается контроллером 138 штангового глубинного насоса приблизительно 5 миллисекунд после получения соответствующего значения измерения положения, временная задержка между фактической нагрузкой на полированный шток, измеренной устройством 136 беспроводной связи и значением нагрузки на полированный шток, принятым контроллером 138 штангового глубинного насоса, может быть больше или меньше чем пять миллисекунд, как показано в таблице 300 справочных данных. Если измеренное значение нагрузки (например, нагрузка 10234 фунта (4642 кг) на полированного штока 110 присваивается ближайшему «во времени» значению положения (например, 0,05 миллисекунды) полированного штока 110 для того, чтобы определить пару измеренных точек при определении, например, динамометрической карты насоса, может быть введена значительная ошибка.
[0041] Чтобы определить или точно попарно сопоставить измеренные или полученные значения положения полированного штока и значения нагрузки на полированный штока без значительной ошибки, типовой контроллер 138 штангового глубинного насоса приведенного примера смещает каждую временную отметку полученных значений нагрузки на полированный шток на величину смещения (например, задержку беспроводной связи, определенную уравнением (1)). Например, Фиг. 3B представляет собой таблицу 308 справочных данных, аналогичную таблице 300 справочных данных, показанной на Фиг. 3А, но с временными отметками каждого из принятых значений нагрузки на полированный шток, измененными с учетом значения смещения и/или значением задержки беспроводной связи (например, определяемых с помощью уравнения (1)). Например, таблица 308 справочных данных, показанная на Фиг. 3B, включает в себя четвертый столбец 310, иллюстрирующий значения нагрузки на полированный шток, предоставляемые устройством 136 беспроводной связи, на основании скорректированных временных отметок, определяемых смещением или задержкой беспроводной связи. Например, каждая временная отметка принятых значений нагрузки на полированный шток изменяется или корректируется с учетом значения смещения (например, третьи значения времени). Чтобы отобразить полученную временную отметку на основании смещения, первый столбец 312 типовой таблицы 308 справочных данных, показанной на Фиг. 3B, включает в себя временную отметку, скорректированную с учетом значения задержки беспроводной связи. Например, если задержка передачи между контроллером 138 штангового глубинного насоса и устройством 136 беспроводной связи (например, задержка беспроводной связи) составляет 20 миллисекунд, записи первого столбца 312 таблицы 308 справочных данных отображают временные отметки значений нагрузки на полированный шток, которые получены и скорректированы с учетом значения задержки беспроводной связи (например, третьи значения временной отметки). Например, в таблице 300 справочных данных, показанной на Фиг. 3А, значение нагрузки на полированный шток, полученное на 0,55 секунды, составляет приблизительно 10234 фунта (4642 кг). Однако значение задержки беспроводной связи в 20 миллисекунд, определенное, например, уравнением (1), указывает, что время, в котором значение нагрузки на полированный шток получено при 0,55 секунды, было принято или измерено тензодатчиком 134 устройства 136 беспроводной связи на отметке времени 0,035 секунды (например, 0,055 секунды - 0,020 секунды). Поэтому первый столбец 312 типовой таблицы 308 справочных данных представляет собой скорректированный таким образом, чтобы включать в себя дополнительные записи временной отметки (по сравнению с таблицей 300 справочных данных, показанной на Фиг. 3А), а четвертый столбец 310 включает в себя значения нагрузки на полированный шток, связанные со смещенной или скорректированной временной отметкой. Однако, как показано в таблице 308 справочных данных, представленной на Фиг. 3B, смещенные значения измерений нагрузки в четвертом столбце 310 не выравнены, не скоррелированы, не синхронизированы, попарно не соединены и не совпадают с моментами времени, в которых положения полированного штока были измерены или выведены контроллером 138 штангового глубинного насоса.
[0042] Фиг. 3С иллюстрирует таблицу 314 справочных данных, которая может быть создана в связи с и/или использована для реализации примеров, описанных в данном документе. Используя смещенные данные о нагрузке, показанные на Фиг. 3B, процессор 150 контроллера 138 штангового глубинного насоса определяет значения нагрузки на полированный шток (например, второй набор значений нагрузки), связанные со значениями положения полированного штока и/или значениями времени значений положения полированного штока. Например, процессор 150 и/или, в более общем случае, контроллер 138 штангового глубинного насоса определяет значения нагрузки на полированный шток, которые соответствуют значениям положения полированного штока, принятым контроллером 138 штангового глубинного насоса, например, путем интерполяции. Согласно Фиг. 3С, типовая таблица 314 справочных данных включает в себя определенные значения нагрузки на полированный шток (например, вторые значения нагрузки, определенные с помощью интерполяции), которые соответствуют измеренным или полученным значениям положения, полученным в конкретный момент времени или временной отметки. Типовая таблица 314, показанная на Фиг. 3С, аналогична таблице 308, показанной на Фиг. 3В, но включает в себя пятый столбец 316, чтобы проиллюстрировать определенные значения нагрузки на полированный шток. В частности, процессор 150 и/или, в более общем случае, контроллер 138 штангового глубинного насоса использует значения временной отметки, значения положения полированного штока и значения нагрузки на полированный шток, например, показанные в таблице 308 справочных данных, представленной на Фиг. 3B, для интерполирования значений нагрузки на полированный. Таким образом, типовой контроллер 138 штангового глубинного насоса попарно сопоставляет значение положения (например, 14,75 дюйма), полученное контроллером 138 штангового глубинного насоса в конкретный момент времени (например, 0,05 секунды) с интерполированным значением нагрузки (например, 10301 фунтов (4672,5)), связанным с конкретным моментом времени (например, 0,05 секунды).
[0043] В проиллюстрированном примере процессор 150 контроллера 138 штангового глубинного насоса использует алгоритм линейной интерполяции для определения интерполированной нагрузки, показанной в пятом столбце 316. В проиллюстрированном примере интерполированное значение нагрузки (например, 10816 фунтов (4906,1 кг)) определяется на основании первого значения нагрузки (например, 10456 фунтов (4742,8 кг)) с корректировкой по времени на 0,085 секунды (т.е. полученное в момент времени 0,105 и скорректированное на основании времени задержки беспроводной связи в 20 миллисекунд) и второго значения нагрузки (например, 11657 фунтов (5287,5 кг), скорректированное по времени на 0,135 секунды (т. е. полученное в момент времени 0,155, которое было скорректировано с учетом времени задержки беспроводной связи в 20 миллисекунд). Например, линейная интерполяция может быть определена следующим уравнением:
Уравнение (2): y = y0 + (y1 – y0)[ ];
];
где y - определенное значение нагрузки на полированный шток, y0 - первое принятое измеренное значение нагрузки, y1 - второе принятое измеренное значение нагрузки, x - значение времени, связанное со значением нагрузки, которое должно быть определено, x0 - значение времени, при котором первое измеренное значение нагрузки было получено контроллером 138 штангового глубинного насоса, а x1 - значение времени, при котором второе измеренное значение нагрузки было получено контроллером 138 штангового глубинного насоса. Например, для определения значения нагрузки, связанного со значением времени 0,1 секунды и значением положения 15,78 дюймов, как показано в таблице 314 справочных данных, процессор 150 может использовать уравнение 2 для определения значения нагрузки (y) в 10816 фунтов (4906 кг), связанного или коррелирующего со значением времени 0,1 секунды и значением положения 15.78, используя измеренное значение нагрузки 10456 фунтов (4742,8 кг) как y0, измеренное значение нагрузки 11657 фунтов (5287,5 кг) как y1, 0,1 секунды как x, 0,085 секунды как  и 0,135 секунды как
и 0,135 секунды как  . В некоторых примерах любая другая информация, проиллюстрированная в таблице 314 справочных данных и/или других собранных данных может использоваться для определения значений нагрузки, связанных с соответствующими значениями положения. В некоторых примерах могут использоваться другие способы интерполяции, включающие в себя, но не ограничиваясь перечисленными, квадратичную интерполяцию, полиномиальную интерполяцию, интерполяцию Лагранжа, интерполяция на основе сплайн-функции и т.д.
. В некоторых примерах любая другая информация, проиллюстрированная в таблице 314 справочных данных и/или других собранных данных может использоваться для определения значений нагрузки, связанных с соответствующими значениями положения. В некоторых примерах могут использоваться другие способы интерполяции, включающие в себя, но не ограничиваясь перечисленными, квадратичную интерполяцию, полиномиальную интерполяцию, интерполяцию Лагранжа, интерполяция на основе сплайн-функции и т.д.
[0044] Хотя типовой способ реализации устройства 136 беспроводной связи и/или контроллер 138 штангового глубинного насоса проиллюстрированы на Фиг. 1, один или несколько элементов, процессов и/или устройств, проиллюстрированных на Фиг. 1, могут быть объединены, разделены, переустроены, пропущены, исключены и/или реализованы любым другим способом. Кроме того, процессор 140, синхронизируемый таймер 142, интерфейс 144 ввода/вывода, приемопередатчик 146, запоминающее устройство 148 и/или, в более общем случае, типовое устройство 136 беспроводной связи, показанные на Фиг. 1, могут быть реализованы с помощью аппаратного обеспечения, программного обеспечения, встроенного программного обеспечения и/или любой комбинации аппаратного обеспечения, программного обеспечения и/или встроенного программного обеспечения. Кроме того, процессор 150, главный таймер 152, интерфейс 154 ввода/вывода, приемопередатчик 156, запоминающее устройство 158, тактовый генератор 159 и/или, в более общем случае, типовой контроллер 138 штангового глубинного насоса, показанные на Фиг. 1, могут быть реализованы с помощью аппаратного обеспечения, программного обеспечения, встроенного программного обеспечения и/или любой комбинации аппаратного обеспечения, программного обеспечения и/или встроенного программного обеспечения. Таким образом, например, любой из перечисленного: процессор 140, синхронизируемый таймер 142, интерфейс 144 ввода/вывода, приемопередатчик 146, запоминающее устройство 148 и/или, в более общем случае, типовое устройство 136 беспроводной связи и/или любой из перечисленного: процессор 150, главный таймер 152, интерфейс 154 ввода/вывода, приемопередатчик 156, запоминающее устройство 158, тактовый генератор 159 и/или, в более общем случае, типовой контроллер 138 штангового глубинного насоса могут быть реализованы одной или несколькими аналоговой или цифровой схемой (схемами), логическими схемами, программируемым процессором (процессорами), специализированной интегральной схемой (схемами) (СИС), программируемым логическим устройством (устройствами) (ПЛУ) и/или программируемой логической интегральной схемой (схемами) (ПЛИС). При чтении любого из пунктов формулы изобретения на устройство или систему данного патента, охватывающие исключительно реализацию программного обеспечения и/или встроенного программного обеспечения по меньшей мере один из примеров любого из перечисленного: процессор 140, синхронизируемый таймер 142, интерфейса 144 ввода/вывода, приемопередатчик 146, запоминающее устройство 148 и/или, в более общем случае, типовое устройство 136 беспроводной связи и/или любой из перечисленного: процессор 150, главный таймер 152, интерфейс 154 ввода-вывода, приемопередатчик 156, запоминающее устройство 158, тактовый генератор 159 и/или, в более общем случае, типовой контроллер 138 штангового глубинного насоса четко определен таким образом, чтобы включать в себя материальное считываемое компьютером устройство хранения данных или диск для хранения данных, такое как запоминающее устройство, цифровой универсальный диск (DVD), компакт-диск (CD) диск Blu-ray и т. д., хранящее программное обеспечение и/или встроенное программное обеспечение. Кроме того, типовое устройство 136 беспроводной связи и/или контроллер 138 штангового глубинного насоса, показанные на Фиг. 1, могут включать в себя один или несколько элементов, процессов и/или устройств в дополнение к показанным на Фиг. 1 или вместо тех, которые показаны на Фиг. 1, и/или могут включать в себя более одного из любых или всех проиллюстрированных элементов, процессов и устройств. В то время как Фиг. 1 изображает обычную кривошипно-балансированную насосную установку, примеры, описанные в данном документе, могут быть реализованы в связи с любой другой насосной установкой.
[0045] Блок-схемы, представляющие типовые способы для реализации устройства 136 беспроводной связи и/или контроллера 138 штангового глубинного насоса, показанных на Фиг. 1, показаны на Фиг. 4-7. В этом примере способы, показанные на Фиг. 4-7 могут быть реализованы считываемыми машиной командами, которые содержат программу для выполнения процессором, таким как процессор 812, показанный на примере процессорной платформы 800, объясненной ниже в связи с Фиг. 8. Программа может быть воплощена в программном обеспечении, хранящемся на материальном считываемом компьютером носителе данных, таком как CD-ROM, гибкий диск, жесткий диск, цифровой универсальный диск (DVD), диск Blu-ray или запоминающее устройство, связанным с процессором 812, но вся программа и/или ее части могут альтернативно выполняться устройством, отличным от процессора 812 и/или воплощаться во встроенном программном обеспечении или выделенном аппаратном обеспечении. Кроме того, хотя типовая программа описана со ссылкой на блок-схемы, проиллюстрированные на Фиг. 4-7, в качестве альтернативного варианта можно использовать множество других способов реализации типового устройства 136 беспроводной связи и/или типового контроллера 138 штангового глубинного насоса. Например, порядок выполнения блоков может быть изменен и/или некоторые из описанных блоков могут быть изменены, исключены или объединены.
[0046] Как упоминалось выше, типовые способы, показанные на Фиг. 4-7, могут быть реализованы с использованием запрограммированных команд (например, считываемых компьютером и/или машиной команд), хранящихся на материальном считываемом компьютером носителе данных, таком как жесткий диск, флэш-память, постоянное запоминающее устройство (ПЗУ), компакт-диск (CD), цифровой универсальный диск (DVD), кэш, оперативное запоминающее устройство (ОЗУ) и/или любое другое запоминающее устройство или диск для хранения данных, в котором информация хранится с любой продолжительностью (например, в течение длительных периодов времени, постоянно, в течение недолгих отдельных случаев, в течение временной буферизации и/или в течение кэширования информации). Как используется в данном документе, термин материальный считываемый компьютером носитель данных явно определен, чтобы включать в себя любой тип считываемого компьютером устройства хранения данных и/или диска для хранения данных и не допускать распространение сигналов и не допускать среду передачи данных. Используемые в данном документе термины «материальный считываемый компьютером носитель данных» и «материальный считываемый машиной носитель данных» используются взаимозаменяемо. Дополнительно или альтернативно, типовые способы, показанные на Фиг. 4-7 могут быть реализованы с использованием запрограммированных команд (например, считываемых компьютером и/или машиной команд), хранящихся на долговременном считываемом компьютером и/или машиной носителе данных, таком как жесткий диск, флэш-память, постоянное запоминающее устройство, компакт-диск, цифровой универсальный диск, кэш, оперативное запоминающее устройство и/или любое другое запоминающее устройство или диск для хранения данных, в котором информация хранится с любой продолжительностью (например, в течение длительных периодов времени, постоянно, в течение недолгих отдельных случаев, в течение временной буферизации и/или в течение кэширования информации). Как используется в данном документе, термин долговременный считываемый компьютером носитель данных четко определен, чтобы включать в себя любой тип считываемого компьютером устройства хранения данных и/или диска для хранения данных и не допускать распространение сигналов и не допускать среду передачи данных. Используемый в данном документе термин «по меньшей мере», при использовании в качестве переходного термина в преамбуле пункта формулы изобретения, является открытым, таким же образом, как термин «содержащий» является открытым.
[0047] Фиг. 4 иллюстрирует типовой способ 400 реализации типового контроллера 138 штангового глубинного насоса, показанного на Фиг. 1. Контроллер 138 штангового глубинного насоса обеспечивает выполнение способа 400, представленного на Фиг. 4, для определения или попарного сопоставления значения нагрузки на полированный шток со значением положения полированного штока в заданный момент времени. В блоке 402 процессор 150 определяет, нужно ли отправлять сигнал синхронизации в устройство 136 беспроводной связи (блок 402). Сигнал синхронизации инициирует возвращение главного таймера 152 и синхронизируемого таймера 142 в исходное состояние, чтобы уменьшить и/или исключить смещение характеристик таймера (например, смещение 222 характеристик таймера, показанное на Фиг. 2) между главным таймером 152 и синхронизируемым таймером 142. Например, процессор 150 проиллюстрированного примера определяет, нужно ли отправлять сигнал синхронизации в блоке 402 путем определения того, истекает ли заданный период времени синхронизации (например, с использованием тактового генератор 159 основного контроллера 138). Например, сигнал синхронизации может посылаться через определённые промежутки времени (например, каждые 100 секунд). Если процессор 150 определяет, что сигнал синхронизации должен быть отправлен, процессор 150 транслирует или передает сигнал устройству 136 беспроводной связи с помощью приемопередатчика 156 (блок 404). Как только сигнал синхронизации отправляется в блоке 404, процессор 150 возвращает главный таймер 152 в исходное состояние (блок 406). В некоторых примерах, чтобы помочь в процессе синхронизации, процессор 150 не возвращает главный таймер 152 в исходное состояние до истечения периода времени, эквивалентного задержке беспроводной связи с момента отправки сигнала синхронизации.
[0048] После того как главный таймер 152 возвращается в исходное состояние в блоке 406 или если сигнал синхронизации не отправляется в блоке 402, процессор 150 контроллера 138 штангового глубинного насоса инициирует сбор данных на основании заранее заданной частоты (блок 408). Например, процессор 150 извлекает из запоминающего устройства 158 заданную частоту проведения выборочных замеров или период проведения выборочных замеров (например, 20 Гц или 50 миллисекунд) для получения данных от первого и второго датчиков 128 и 130 для того, чтобы измерить или получить значения положения полированного штока или для того, чтобы получить значения нагрузки на полированный шток из устройства 136 беспроводной связи. Заранее заданная частота или период проведения выборочных замеров могут быть предоставлены или изменены с помощью пользовательского интерфейса ввода контроллера 138 штангового глубинного насоса. В некоторых примерах процессор 150 инициирует и/или инициализирует главный таймер 152 и определяет, с помощью главного таймера 152, время, прошедшее с момента инициализации главного таймера 152. Процессор 150 определяет, равно ли прошедшее время заранее заданному или больше заранее заданного времени, такого как, например, пятьдесят миллисекунд (например, период проведения выборочных замеров).
[0049] Если процессор 150 определяет, что прошедшее время равно или больше заранее заданному значению частоты, на основании данных от первого датчика 128 и второго датчика 130 процессор 150 получает значение положения полированного штока (блок 410). Например, процессор 150 измеряет или получает значение положения полированного штока на основании сигналов, предоставляемых первым датчиком 128 и/или вторым датчиком 130. Процессор 150 также присваивает значение момента времени (например, временную отметку) принятому значению положения полированного штока (блок 412). Например, процессор 150 может определять момент времени, в который было принято значение положения полированного штока с использованием, например, тактового генератора 159 контроллера 138 штангового глубинного насоса.
[0050] Процессор 150 получает измеренное значение нагрузки на полированный шток от устройства 136 беспроводной связи (блок 414). Используя тактовый генератор 159 контроллера 138 штангового глубинного насоса, процессор 150 присваивает значение момента времени (например, временную отметку) принятому измеренному значению нагрузки на полированный шток (блок 416). Значение положения полированного штока и присвоенный ему момент времени, а также измеренное значение нагрузки на полированный шток и присвоенный ему момент времени сохраняются в запоминающем устройстве 158 (блок 418). В некоторых примерах процессор 150 генерирует таблицу справочных данных, аналогичную таблице 300 справочных данных.
[0051] Затем процессор 150 получает значение задержки беспроводной связи, например, из запоминающего устройства 158 (блок 420). Процессор 150 корректирует значение момента времени или временную отметку, присвоенную измеренному значению нагрузки на полированное шток, на величину, эквивалентную задержке беспроводной связи (блок 422). Например, ссылаясь на таблицу 308 справочных данных, представленную на Фиг. 3B и/или таблицу 316 справочных данных, представленную на Фиг. 3C, каждая временная отметка, записанная, когда контроллер 138 штангового глубинного насоса принимает измеренные значения нагрузки на полированный шток, корректируется с учетом значения задержки беспроводной связи. В некоторых примерах присвоенная временная отметка принятого измеренного значения нагрузки на полированный шток уменьшается на значение задержки беспроводной связи.
[0052] Процессор 150 определяет, совпадает ли скорректированное значение момента времени принятого измеренного значения нагрузки на полированный шток со значением момента времени значения положения полированного штока (блок 424). Если скорректированное значение момента времени измеренного значения нагрузки на полированный шток совпадает или соотносится с (например, равно) величине момента времени значения положения в блоке 424, процессор 150 присваивает или соотносит измеренное значение нагрузки на полированный шток и значение положения полированного штока. (блок 426).
[0053] Если скорректированное значение момента времени измеренного значения нагрузки на полированный шток не соответствует (например, не равно) значению момента времени значения положения полированного штока в блоке 424 (например, см. таблицу 308 справочных данных), то процессор 150 определяет значение нагрузки на полированный шток, связанное со значением момента времени значения положения полированного штока (например, см. Фиг. 3C) (блок 428). Например, чтобы определить второе значение нагрузки на полированный шток, процессор 150 математически определяет (например, интерполирует) значение нагрузки на полированный шток, используя значение положения полированного штока и его временную отметку, измеренное значение нагрузки на полированный шток и скорректированную временную отметку значения измеренных значений нагрузки на полированный шток для того, чтобы получить, синтезировать или определить значение нагрузки на полированный шток для того же значения момента времени (например, временной отметки), что и для значения положения полированного штока (например, полученного в блоках 410 и 412). Процессор 150 соотносит или попарно сопоставляет значение положения полированного штока с определенным значением нагрузки на полированный шток при значении момента времени значения положения полированного штока. В некоторых примерах попарно сопоставленное значение положения полированного штока и определенное значение нагрузки на полированный шток используется для создания динамометрической карты насосной установки 100.
[0054] Чтобы определить значение нагрузки на полированный шток с помощью интерполяции, процессор 150 определяет, что интерполяция должна выполняться, когда контроллер 138 штангового глубинного насоса получает по меньшей мере два измеренных значения нагрузки на полированный шток. В некоторых примерах определение того, следует ли выполнять интерполяцию, может быть основано на заранее заданном периоде времени. Например, заранее заданный период времени может быть установлен в 1 секунду, 10 секунд и/или любой другой требуемый временной интервал или период. Например, после каждого заранее заданного периода времени процессор 150 может выполнять интерполяцию на основании полученных значений положения полированного штока и измеренных значений нагрузки на полированный шток, значений временной отметки значений положения полированного штока и скорректированных значений временной отметки измеренных значений нагрузки на полированный шток. Процессор 150 может использовать главный таймер 152, тактовый генератор 159 и/или другой таймер контроллера 138 штангового глубинного насоса, чтобы определить, истек ли заранее заданный период времени. В некоторых примерах интерполяция выполняется после того, как будет получено или собрано определенное количество значений положения полированного штока (например, между двумя и четырьмя значениями) и определенное количество измеренных значений нагрузки на полированный шток (например, между двумя и четырьмя значениями). Например, процессор 150 может определять количество значений положения полированного штока и количество измеренных значений нагрузки на полированный шток, полученных контроллером 138 штангового глубинного насоса. В некоторых примерах процессор 150 выполняет интерполяцию каждый раз, когда значение положения полированного штока и измеренное значение нагрузки на полированный шток получено или принято контроллером 138 штангового глубинного насоса. В некоторых таких примерах нехватка достаточного количества точек данных (например, двух измеренных значений нагрузки на полированный шток), необходимых для выполнения интерполяции приводит к тому, что процессор 150 возвращается к блоку 402 для дополнительного сбора данных.
[0055] После того, как измеренное значение нагрузки на полированный шток соотнесено со значением положения полированного штока в блоке 426 или значение нагрузки определяется при том же моменте времени, что и значение положения полированного штока в блоке 428, процессор 150 определяет, нужно ли прекращать получение значений положения полированного штока и измеренных значений нагрузки на полированный шток (блок 430). Если в блоке 430 определено, что процесс должен продолжаться, процесс возвращается к блоку 402. Если в блоке 430 процессор 150 определяет, что процесс прекращается, то процесс 400 завершается. Процессор 150 в блоке 430 определяет, должен ли процесс прекращаться, когда контроллер 138 штангового глубинного насоса больше не получает значений положения полированного штока и/или измеренных значений нагрузки на полированный шток. Например, контроллер 138 штангового глубинного насоса перестает получать значения положения полированного штока и/или измеренные значения нагрузки на полированный шток, когда, например, двигатель 114 выключен. В некоторых примерах процесс прекращается после истечения заранее заданного периода времени, такого как, например, 1 час, 24 часа, 48 часов и/или любое другое требуемое время.
[0056] Фиг. 5 иллюстрирует типовой способ 500 для реализации типового устройства 136 беспроводной связи в соответствии с принципами данного изобретения. Согласно Фиг. 5, процессор 140 устройства 136 беспроводной связи инициирует синхронизируемый таймер 142 (блок 502). Например, синхронизируемый таймер 142 осуществляет обратный отсчет от начального значения, представляющего время проведения выборочных замеров (например, 50 миллисекунд), до нулевого значения, чтобы указывать, когда нужно измерять значение нагрузки на полированный шток. Синхронизируемый таймер 142 может использоваться для установки периода проведения выборочных замеров и/или по существу обеспечения получения данных от тензодатчика 134 на частоте, которая равна частоте, предоставляемой главный таймером 152 для получения значений положения полированного штока.
[0057] Процессор 140 определяет, принят ли сигнал синхронизации (блок 504). Например, процессор 140 принимает сигнал синхронизации, инициированный или отправленный контроллером 138 штангового глубинного насоса в блоке 404, показанном на Фиг. 4. В других примерах сигнал синхронизации может быть инициирован или отправлен с удаленного устройства (например, контроллер диспетчерской, контроллер полевого устройства и т.д.). Если процессор 140 определяет, что сигнал синхронизации принят в блоке 504, процессор 140 определяет и сохраняет значение момента времени или временную отметку синхронизируемого таймера 142, когда принят сигнал синхронизации (блок 506). Например, процессор 140 сохраняет временную отметку в запоминающем устройстве 148.
[0058] Если в блоке 504 сигнал синхронизации не принят, или процессор 140 сохраняет значение момента времени синхронизируемого таймера 142, когда сигнал синхронизации принят в блоке 506, процессор 140 определяет, следует ли измерять нагрузку на полированный шток 110 (блок 508). Например, процессор 140 типового устройства 136 беспроводной связи измеряет значение нагрузки на полированный шток по истечении срока отсчета синхронизируемого таймера 142. Например, если частота или время проведения выборочных замеров синхронизируемого таймера 142 установлены для измерения значений нагрузки на полированный шток через определённые промежутки времени (например, каждые 50 миллисекунд), процессор 140 получает измеренное значение нагрузки на полированный шток от тензодатчика 134 (блок 510). Если процессор 140 в блоке 508 определяет, что период проведения выборочных замеров еще не истек, процессор 140 ждет до истечения периода проведения выборочных замеров, чтобы получить измеренное значение нагрузки на полированный шток.
[0059] Когда измеренное значение нагрузки на полированный шток измерено тензодатчиком 134, процессор 140 передает сигнал, соответствующий значению нагрузки на полированный шток, на контроллер 138 штангового глубинного насоса с помощью приемопередатчика 146 (блок 512). Процессор 140 определяет значение расхождения между начальным значением времени синхронизируемого таймера 142 и временной отметкой синхронизируемого таймера 142, когда был принят сигнал синхронизации (блок 514). Процессор 140 возвращает синхронизируемый таймер 142 в исходное состояние или корректирует его до значения, которое равно начальному значению времени плюс определенное значение расхождения (блок 516). Например, если начального значение синхронизируемого таймера или время проведения выборочных замеров установлено на 50 миллисекунд, синхронизируемый таймер 142 осуществляет обратный отсчет от 50 миллисекунд до нуля, в это время процессор 140 измеряет значение нагрузки на полированный шток в блоке 508. Однако, если процессор 140 принимает сигнал синхронизации от контроллера 138 штангового глубинного насоса когда показание синхронизируемого таймера составляет 48 миллисекунд, синхронизируемый таймер 142 работает на 2 миллисекунды быстрее, чем главный таймер 152. Однако процессор 140 иллюстрируемого примера продолжает допускать, чтобы ведомый таймер 142 вел отсчет до нуля и измерять значение нагрузки на полированный шток в блоке 510. Затем процессор 140 возвращает синхронизируемый таймер 142 к значению 52 миллисекунды вместо 50 миллисекунд (например, {(начальное значение возвращения в исходное состояние (50 миллисекунд) + 2} – время синхронизируемого таймера 142 в момент времени, когда принят сигнал синхронизации (48 миллисекунд)).
[0060] Фиг. 6 иллюстрирует типовой способ 600 определения значения задержки беспроводной связи или задержки передачи в соответствии с принципами данного изобретения. Процесс 600 начинается с режима подготовки калибровки (блок 602). Режим калибровки может быть инициирован с помощью кнопки на контроллере 138 штангового глубинного насоса и/или устройстве 136 беспроводной связи и/или калибровочного сигнала, переданного контроллеру 138 штангового глубинного насоса и/или устройству 138 беспроводной связи. Если процессор 150 определяет, что контроллер 138 штангового глубинного насоса не находится в режиме калибровки, процесс возвращается к блоку 602. В режиме 602 калибровки типовой вспомогательный тензодатчик 160 соединен с интерфейсом 154 ввода/вывода контроллера 138 штангового глубинного насоса с помощью проводного кабеля 162, как показано, например, на Фиг. 1. Кроме того, тензодатчик 134 и устройство 136 беспроводной связи соединены с возможностью передачи информации с контроллером 138 штангового глубинного насоса.
[0061] В режиме калибровки процессор 150 контроллера 138 штангового глубинного насоса получает первый набор значений нагрузки на полированный шток с помощью тензодатчика 134 и устройства 136 беспроводной связи (блок 604). Первый набор значений нагрузки на полированный шток может быть определен в период проведения выборочных замеров в 50 миллисекунд (например, частота 20 Гц) в течение одного цикл хода насосной установки 100. Процессор 150 использует главный таймер 152 для определения периода или частоты проведения выборочных замеров. Кроме того, процессор 150 может использовать тактовый генератор 159 для определения временной отметки, при которой от устройства 136 беспроводной связи принимается каждое значение нагрузки на полированный шток. В некоторых примерах первый набор значений нагрузки на полированный шток получают с помощью двух или более циклов хода насосной установки 100 и/или в любой другой требуемый период проведения выборочных замеров (например, каждые 10 миллисекунд, каждую секунду и т.д.). В некоторых примерах первый набор значений нагрузки на полированный шток хранится в запоминающем устройстве 158.
[0062] Кроме того, процессор 150 контроллера 138 штангового глубинного насоса получает второй набор значений нагрузки на полированный шток с помощью вспомогательного тензодатчика 160 и проводного кабеля 162 (блок 606). Второй набор значений нагрузки на полированный шток может быть определен по существу одновременно (например, в то же время) с тем, как первый набор значений нагрузки на полированный шток предоставляется устройством 136 беспроводной связи. Например, второй набор значений нагрузки на полированный шток может быть определен в тот же период проведения выборочных замеров в 50 миллисекунд в течение цикл хода насосной установки 100. Например, главный таймер 152 и/или синхронизируемый таймер 142 могут использоваться для установки периода проведения выборочных замеров и/или по существу обеспечения получения данных от тензодатчика 134 и вспомогательного тензодатчика 160 на равных частотах. Кроме того, процессор 150 может использовать тактовый генератор 159 для определения временной отметки, при которой от вспомогательного тензодатчика 160 принимается каждое значение нагрузки на полированный шток. В некоторых примерах второй набор значений нагрузки на полированный шток хранится в запоминающем устройстве 158. В некоторых примерах главный таймер 152 и синхронизируемый таймер 142 синхронизируются (например, с помощью метода 500, представленного на Фиг. 5) до инициализации метода 400 калибровки.
[0063] После получения первого и второго набора значений нагрузки на полированный шток процессор 150 анализирует первый и второй наборы значений нагрузки на полированный шток (блок 608). Например, процессор 150 может использовать сравнивающее устройство для сравнения первого набора значений нагрузки на полированный шток и второго набора значений нагрузки на полированный шток, чтобы определить, какие значения по существу равны или имеют одинаковые значения (например, в пределах 1%). Затем процессор 150 сравнивает временные отметки равных или практически одинаковых значений нагрузки на полированный шток первого набора значений нагрузки на полированный шток и второго набора значений нагрузки на полированный шток. Например, определяется или рассчитывается среднее временное различие между каждой временной отметкой равных или практически одинаковых значений нагрузки на полированный шток. В некоторых примерах первый и второй наборы значений нагрузки на полированный шток в отдельности стандартизируются, так что значения нагрузки варьируются от нуля до единицы. Затем стандартизованные данные анализируются для определения среднего сдвига фазы между каждым из показаний. В некоторых примерах первый и второй наборы значений нагрузки на полированный шток преобразуют в различные пороговые значения нагрузки в относительных единицах (например, между 0,1 и 0,9) и интерполируют все точки из каждого набора данных, где значения нагрузки в относительных единицах пересекают эти линии. Процессор 150 устанавливает результирующий сдвиг фаз (например, в секундах) в качестве задержки беспроводной связи (TRL - TML) (блок 610). В некоторых примерах значение задержки беспроводной связи сохраняется в запоминающем устройстве 158 для последующей работы контроллера 138 штангового глубинного насоса. После завершения калибровки вспомогательный тензодатчик 160 и проводной кабель 162 удаляются.
[0064] Фиг. 7 иллюстрирует другой типовой способ 700 определения значения задержки беспроводной связи или задержки передачи в соответствии с принципами данного изобретения. Способ 700 начинается с режима подготовки калибровки (блок 702). Режим калибровки может быть инициирован с помощью кнопки на контроллере 138 штангового глубинного насоса и/или устройстве 136 беспроводной связи. В некоторых примерах режим калибровки может быть инициирован с помощью калибровочного сигнала, передаваемого контроллеру 138 штангового глубинного насоса и/или устройству 138 беспроводной связи. Если процессор 150 определяет, что контроллер 138 штангового глубинного насоса и/или устройство 136 беспроводной связи не находятся в режиме калибровки, процесс возвращается к блоку 702. В режиме калибровки устройство 136 беспроводной связи генерирует сигнал (блок 704). В некоторых примерах сигнал может быть стандартным сигналом (например, стандартным колебательным сигналом, таким как, например, синусоидальный волновой сигнал с частотой от 30 Гц до 60 Гц и т.д.). В некоторых примерах сигнал может представлять собой сигнал, предоставляемый тензодатчиком 134, соответствующий значению измерения нагрузки на полированный шток 110.
[0065] После генерирования сигнала устройство 136 беспроводной связи передает сигнал (например, тот же сигнал) с помощью беспроводной связи и временного проводного соединения (блок 706). Например, устройство 136 беспроводной связи передает сигнал по беспроводной сети с помощью приемопередатчика 146 и передает сигнал с помощью временного проводного соединения с использованием временного провода 166. В свою очередь, контроллер 138 штангового глубинного насоса получает сигнал с помощью беспроводной связи (блок 708). Например, контроллер 138 штангового глубинного насоса получает сигнал, переданный приемопередатчиком 146 устройства 136 беспроводной связи с помощью приемопередатчика 156. В некоторых примерах процессор 150 использует тактовый генератор 159 для того, чтобы поставить временную отметку сигналу, принятому беспроводной связью. Кроме того, контроллер 138 штангового глубинного насоса получает сигнал с помощью временного проводного соединения (блок 710). Например, процессор 150 контроллера 138 штангового глубинного насоса принимает сигнал от временного проводного соединения с помощью интерфейса 154 ввода-вывода. В некоторых примерах процессор 150 использует тактовый генератор 159 для того, чтобы поставить временную отметку сигналу, полученному с использованием временного проводного соединения.
[0066] Процессор 150 или, в более общем случае, контроллер 138 штангового глубинного насоса, анализирует разницу между моментом времени, в который сигнал принимается с помощью беспроводной связи, и моментом времени, в который сигнал принимается с помощью временного проводного соединения (блок 712). Например, процессор 150 или, в более общем случае, контроллер 138 штангового глубинного насоса может использовать сравнивающее устройство для сравнения и/или определения разницы между моментом времени, в который сигнал был принят с помощью беспроводной связи, и моментом времени, в который был получен сигнал с помощью временного проводного соединения. Контроллер 138 штангового глубинного насоса устанавливает временное различие (например, в секундах) в качестве задержки беспроводной связи (TRL - TML) (блок 714). В некоторых примерах значение задержки беспроводной связи сохраняется в запоминающем устройстве 158 для последующей работы контроллера 138 штангового глубинного насоса. После завершения калибровки проводной кабель 166 отсоединяют.
[0067] Фиг. 8 представляет собой блок-схему типовой процессорной платформы 800, способной исполнять команды для реализации способов, представленных на Фиг. 4-7 и/или контроллера 138 штангового глубинного насоса и устройства 136 беспроводной связи, показанных на Фиг. 1. Процессорной платформой 800 может быть, например, сервер, персональный компьютер, мобильное устройство (например, мобильный телефон, смартфон, планшет, такой как iPadTM), карманный персональный компьютер (КПК), интернет-устройство или вычислительное устройство любого другого типа.
[0068] Процессорная платформа 800 проиллюстрированного примера включает в себя процессор 812. Процессор 812 проиллюстрированного примера представляет собой аппаратное обеспечение. Например, процессор 812 может быть реализован одной или несколькими интегральными схемами, логическими схемами, микропроцессорами или контроллерами любого требуемого модельного ряда или любого производителя.
[0069] Процессор 812 проиллюстрированного примера включает в себя локальное запоминающее устройство 813 (например, кэш). С помощью шины 818 процессор 812 проиллюстрированного примера находится в режиме обмена информацией с основным запоминающим устройством, в том числе с кратковременным запоминающим устройством 814 и долговременным запоминающим устройством 816. Кратковременное запоминающее устройство 814 может быть реализовано синхронным динамическим запоминающим устройство с произвольной выборкой (SDRAM), динамическим оперативным запоминающим устройством (DRAM), динамическим оперативным запоминающим устройством RAMBUS (RDRAM) и/или любым другим оперативным запоминающим устройством. Долговременное запоминающее устройство 816 может быть реализовано флэш-памятью и/или любым другим требуемым типом запоминающего устройства. Доступ к основному запоминающему устройству 814, 816 управляется контроллером запоминающего устройства.
[0070] Процессорная платформа 800 проиллюстрированного примера также включает в себя схему 820 интерфейса. Схема 820 интерфейса может быть реализована любым стандартом интерфейса, таким как интерфейс Ethernet, универсальная последовательная шина (USB) и/или интерфейс PCI Express.
[0071] В проиллюстрированном примере одно или несколько устройств 822 ввода соединены со схемой 820 интерфейса. Устройство (устройства) 822 ввода позволяет (позволяют) пользователю вводить данные и команды в процессор 812. Устройство (устройства) ввода может быть реализовано, например, с помощью аудиодатчика, микрофона, клавиатуры, кнопки, мыши, сенсорного экрана, трекпада и/или трекбола.
[0072] Одно или несколько устройств 824 вывода также подключены к схеме 820 интерфейса проиллюстрированного примера. Устройства 824 вывода могут быть реализованы, например, устройствами отображения (например, светоизлучающим диодом (LED), органическим светоизлучающим диодом (OLED), жидкокристаллическим дисплеем, дисплеем на электронно-лучевой трубке (CRT), сенсорным экраном, тактильным устройством вывода, светоизлучающим диодом (LED). Таким образом, схема 820 интерфейса проиллюстрированного примера обычно включает в себя плату графического драйвера, чип графического драйвера или процессор графического драйвера.
[0073] Схема 820 интерфейса проиллюстрированного примера также включает в себя устройство связи, такое как передатчик, приемник, приемопередатчик, модем и/или плату сетевого интерфейса для облегчения обмена данными с внешними машинами (например, вычислительными устройствами любого типа) с помощью сети 826 (например, Ethernet-соединение, цифровая абонентская линия (DSL), телефонная линия, коаксиальный кабель, сотовая телефонная система и т. д.).
[0074] Процессорная платформа 800 проиллюстрированного примера также включает в себя одно или несколько запоминающих устройств 828 большой емкости для хранения программного обеспечения и/или данных. Примеры таких запоминающих устройств 828 большой емкости включают накопители на гибких дисках, накопители на жестких дисках, накопители на компакт-дисках, накопители на дисках Blu-ray, RAID-системы и накопители на цифровых универсальных дисках (DVD).
[0075] Запрограммированные команды 832 для реализации способов, представленных на Фиг. 4-8, могут быть сохранены в запоминающем устройстве 828 большой емкости, в кратковременном запоминающем устройстве 814, в долговременном запоминающем устройстве 816 и/или на съемном материальном считываемом компьютером носителе данных, таком как CD или DVD.
[0076] По меньшей мере некоторые из вышеупомянутых примеров включают в себя одну или несколько конструктивных особенностей и/или преимуществ, включающих в себя, но не ограничиваясь перечисленным, следующее:
[0077] В некоторых примерах способ включает в себя определение, с помощью контроллера штангового глубинного насоса первого значения положения полированного штока насосной установки; присваивание первого значения времени первому значению положения; получение первых значений нагрузки на полированный шток, присваивание вторых значений времени соответствующим первым значениям нагрузки, корректирование каждого из вторых значений времени до соответствующих третьих значений времени на основании значения задержки беспроводной связи и определение второго значения нагрузки, связанного с первым значением положения при первом значении времени на основании первых значений нагрузки и третьих значений времени.
[0078] В некоторых примерах определение второго значения нагрузки включает в себя интерполяцию второго значения нагрузки на основании первого значения времени, первых значений нагрузки и третьих значений времени.
[0079] В некоторых примерах способ включает в себя создание таблицы справочных данных с использованием первого значения положения, первого значения времени и второго значения нагрузки.
[0080] В некоторых примерах определение значения задержки беспроводной связи включает в себя определение задержки передачи между контроллером штангового глубинного насоса и устройством беспроводной связи.
[0081] В некоторых примерах определение задержки передачи включает в себя определение временного различия между получением первого сигнала от первого тензодатчика, предоставляемого устройством беспроводной связи, и вторым сигналом от второго тензодатчика, обеспечиваемого проводным соединением, первым сигнал и второй сигнал соответствуют нагрузке на полированный шток в одно и то же время.
[0082] В некоторых примерах определение задержки передачи включает в себя определение временного различия между получением сигнала, предоставляемого устройством беспроводной связи с помощью беспроводной связи и получением сигнала, предоставляемого устройством беспроводной связи с помощью проводного соединения.
[0083] В некоторых примерах способ включает в себя трансляцию сигнала синхронизации в устройство беспроводной связи через определённые промежутки времени.
[0084] В некоторых примерах способ включает в себя возвращение главного таймера в исходное состояние после трансляции сигнала синхронизации.
[0085] В некоторых примерах способ включает в себя передачу первых значений нагрузки на полированный шток контроллеру штангового глубинного насоса с помощью устройства беспроводной связи.
[0086] В некоторых примерах способ включает в себя инициирование синхронизируемого таймера к начальному значению и передачу измеренного значения нагрузки первых значений нагрузки, когда синхронизируемый таймер ведет отсчет от начального значения до нулевого значения, начальное значение определяется частотой, при которой первые значения нагрузки на полированный шток должны передаваться на контроллер штангового глубинного насоса.
[0087] В некоторых примерах способ включает в себя определение значения временной отметки возвращения в исходное состояние, когда устройство беспроводной связи принимает сигнал синхронизации.
[0088] В некоторых примерах способ включает в себя возвращение синхронизируемого таймера устройства беспроводной связи на значение, эквивалентное начальному значению плюс разница между начальным значением и значением временной отметки возвращения в исходное состояние.
[0089] В некоторых примерах, контроллер штангового глубинного насоса для использования с насосной установкой включает в себя первый процессор для того, чтобы определить, с помощью контроллера штангового глубинного насоса, первое значение положения полированного штока насосной установки; присвоить первое значение времени первому значению положения; получить первые значения нагрузки на полированный шток; присвоить вторые значения времени соответствующим первым значениям нагрузки; скорректировать каждое из вторых значений времени до соответствующих третьих значений времени на основании значения задержки беспроводной связи и определить второе значение нагрузки, связанное с первым значением положения при первом значении времени на основании первых значений нагрузки и третьих значений времени.
[0090] В некоторых примерах процессор интерполирует второе значение нагрузки на основании первого значения времени, первых значений нагрузки и третьего времени.
[0091] В некоторых примерах первый процессор генерирует таблица справочных данных, используя первое значение положения, первое значение времени и второе значение нагрузки.
[0092] В некоторых примерах контроллер штангового глубинного насоса включает в себя устройство беспроводной связи, которое соединено с возможностью передачи информации с контроллером штангового глубинного насоса, устройство беспроводной связи используется для передачи первых значений нагрузки на полированный шток в контроллер штангового глубинного насоса.
[0093] В некоторых примерах первый процессор определяет задержку передачи между контроллером штангового глубинного насоса и устройством беспроводной связи для определения значения задержки беспроводной связи во время процесса калибровки.
[0094] В некоторых примерах второй тензометрический динамометр соединен с возможностью передачи информации с контроллером штангового глубинного насоса с помощью временного проводного соединения во время процесса калибровки, и первый процессор определяет временное различие между получением первого сигнала от первого тензодатчика, предоставляемого устройством беспроводной связи и второго сигнала от второго тензодатчика, обеспечиваемого временным проводным соединением, предоставляемого во время процесса калибровки, первый сигнал и второй сигнал представляют собой нагрузку на полированный шток в одно и то же время.
[0095] В некоторых примерах первый процессор определяет значение задержки передачи путем определения временного различия между получением сигнала с помощью беспроводного соединения, предоставляемым устройством беспроводной связи, и получением сигнала от устройства беспроводной связи с помощью временного проводного соединения, предоставленного в течение процесса калибровки.
[0096] В некоторых примерах первый процессор должен транслировать сигнал синхронизации в устройство беспроводной связи через определённые промежутки времени.
[0097] В некоторых примерах первый процессор возвращает главный таймер в исходное состояние после трансляции сигнала синхронизации.
[0098] В некоторых примерах второй процессор устройства беспроводной связи инициирует синхронизируемый таймер к начальному значению, и второй процессор передает измеренное значение нагрузки первых значений нагрузки, когда синхронизируемый таймер ведет отсчет от начального значения до нулевого значения, начальное значение определяется частотой, при которой первые значения нагрузки на полированный шток должны передаваться на контроллер штангового глубинного насоса.
[0099] В некоторых примерах второй процессор определяет значение временной отметки возвращения в исходное состояние, когда устройство беспроводной связи принимает сигнал синхронизации.
[00100] В некоторых примерах второй процессор возвращает синхронизируемый таймер устройства беспроводной связи на значение, эквивалентное начальному значению плюс разница между начальным значением и значением временной отметки возвращения в исходное состояние.
[00101] В некоторых примерах материальный считываемый компьютером носитель данных включает в себя команды, которые при выполнении заставляют машину: определить, с помощью контроллера штангового глубинного насоса, первое значение положения полированного штока насосной установки; присвоить первое значение времени первому значению положения; получить первые значения нагрузки на полированный шток; присвоить вторые значения времени соответствующим первым значениям нагрузки; скорректировать каждое из вторых значений времени до третьих значений времени на основании значения задержки беспроводной связи и определить вторые значения нагрузки, связанные с первым значением положения при первом значении времени на основании первых значений нагрузки и третьих значений времени.
[00102] В некоторых примерах считываемый компьютером носитель данных включает в себя команды, которые при их исполнении, заставляют машину интерполировать второе значение нагрузки на основании первого значения времени, первых значений нагрузки и третьего времени.
[00103] В некоторых примерах считываемый компьютером носитель данных включает в себя команды, которые при их исполнении заставляют машину генерировать таблицу справочных данных с использованием первого значения положения, первого значения времени и второго значения нагрузки.
[00104] В некоторых примерах считываемый компьютером носитель данных включает в себя команды, которые при их исполнении заставляют машину определять временное различие между получением первого сигнала от первого тензодатчика, предоставленного устройством беспроводной связи, и вторым сигналом от второго тензодатчика, предоставленного по проводному соединению, для определения значения задержки беспроводной связи.
[00105] В некоторых примерах считываемый компьютером носитель данных включает в себя команды, которые при их исполнении заставляют машину генерировать и передавать первый сигнал в том же варианте, что и второй сигнал.
[00106] В некоторых примерах считываемый компьютером носитель данных включает в себя команды, которые при их исполнении заставляют машину определять временное различие между получением сигнала от устройства беспроводной связи, предоставленного беспроводной связью, и получением сигнала от устройства беспроводной связи, предоставленного проводным соединением, для определения значения задержки беспроводной связи.
[00107] В некоторых примерах считываемый компьютером носитель данных включает в себя команды, которые при их исполнении заставляют машину транслировать сигнал синхронизации через определённые промежутки времени.
[00108] В некоторых примерах считываемый компьютером носитель данных включает в себя команды, которые при их исполнении заставляют машину возвращать главный таймер в исходное состояние после трансляции сигнала синхронизации.
[00109] Несмотря на то, что в данном документе описаны некоторые примеры способов, устройств и изделий, объем защиты данным патентом не ограничивается ими. Напротив, этот патент охватывает все способы, устройства и изделия, должным образом подпадающие под объем формулы изобретения данного патента.
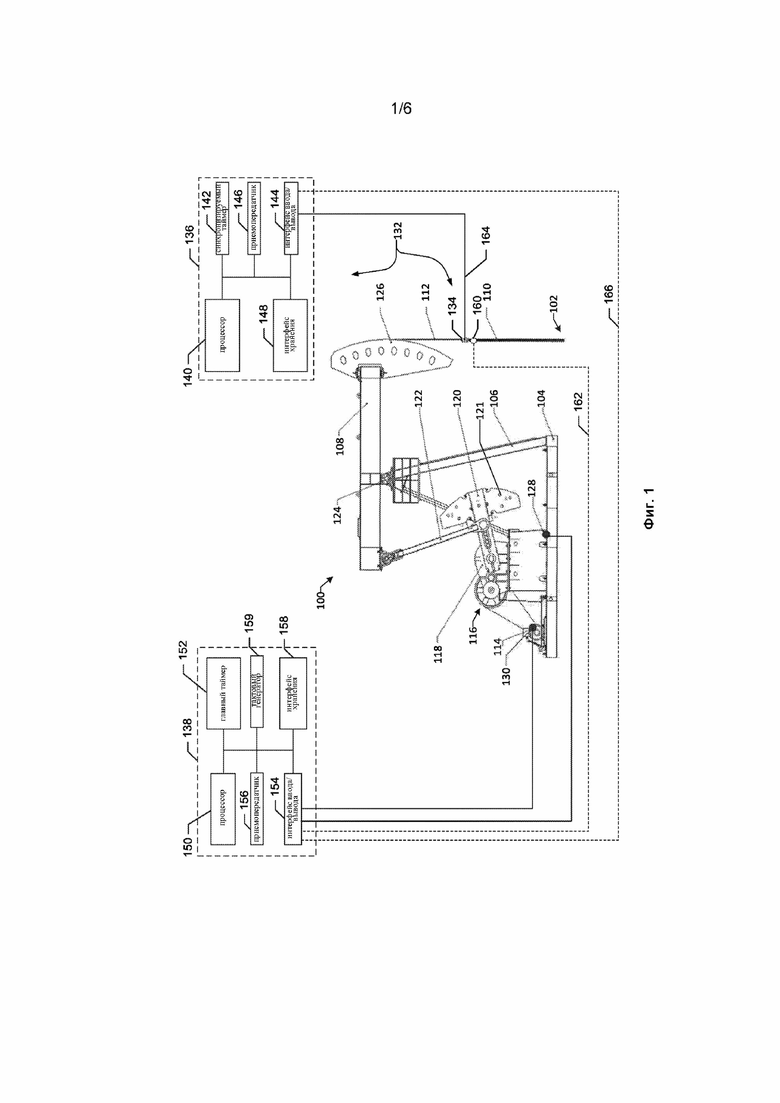
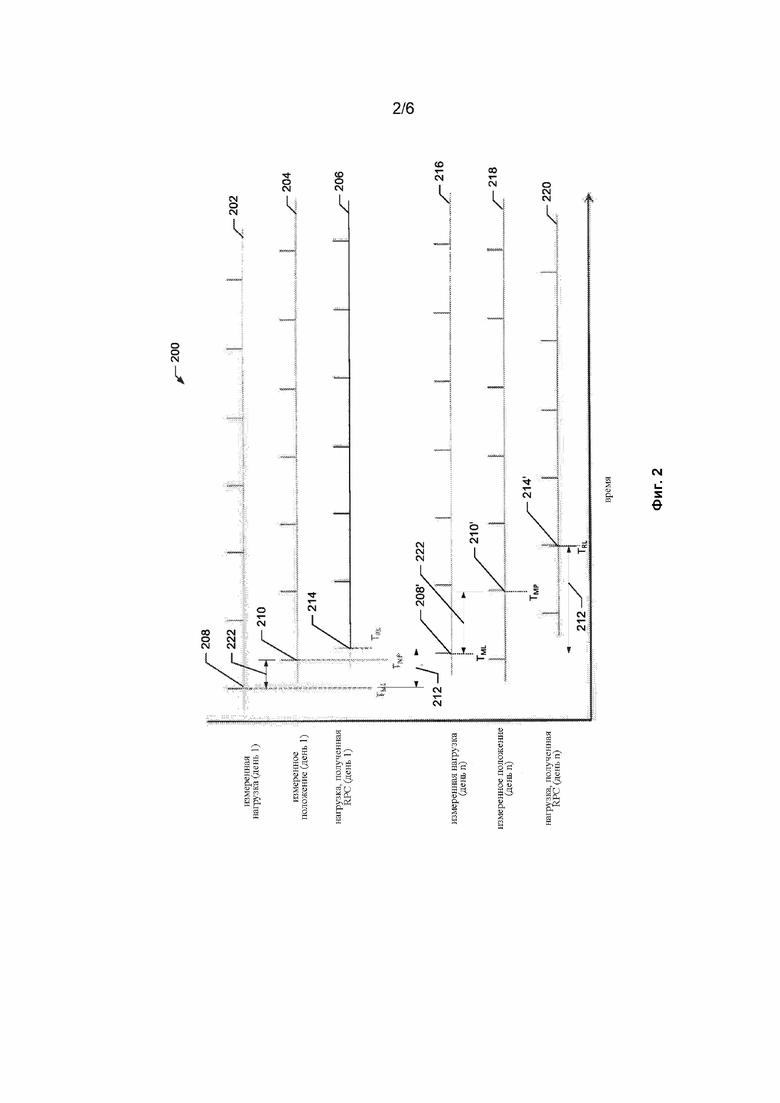
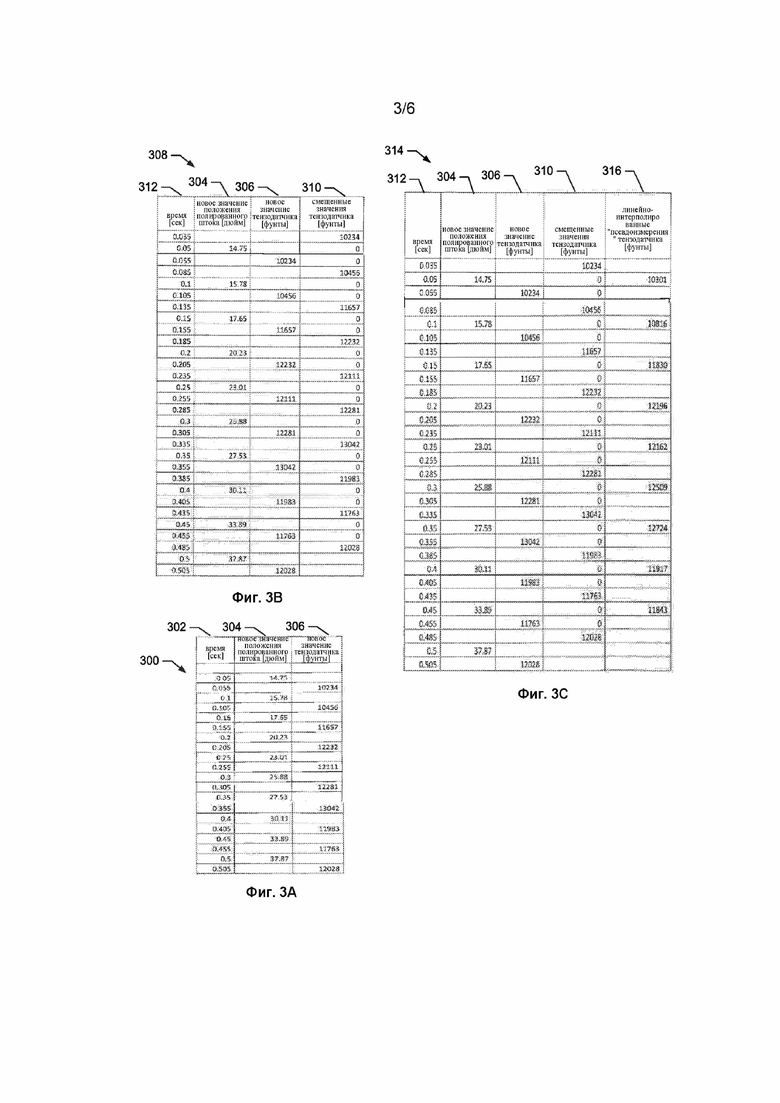
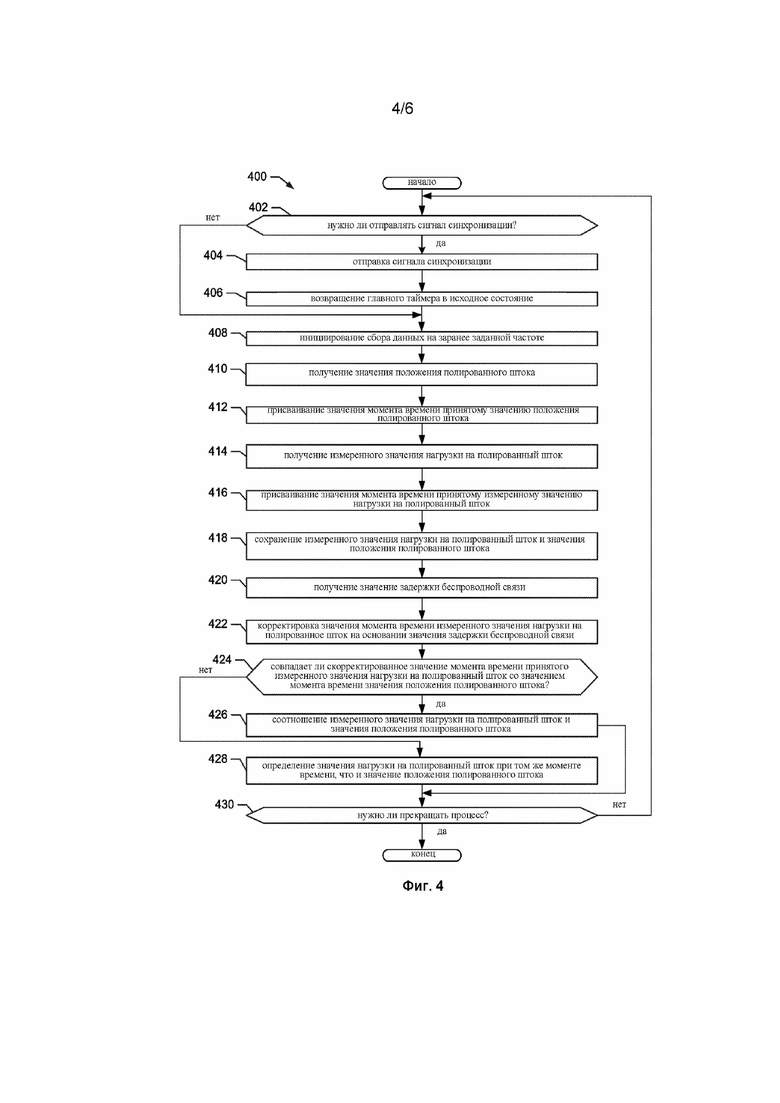
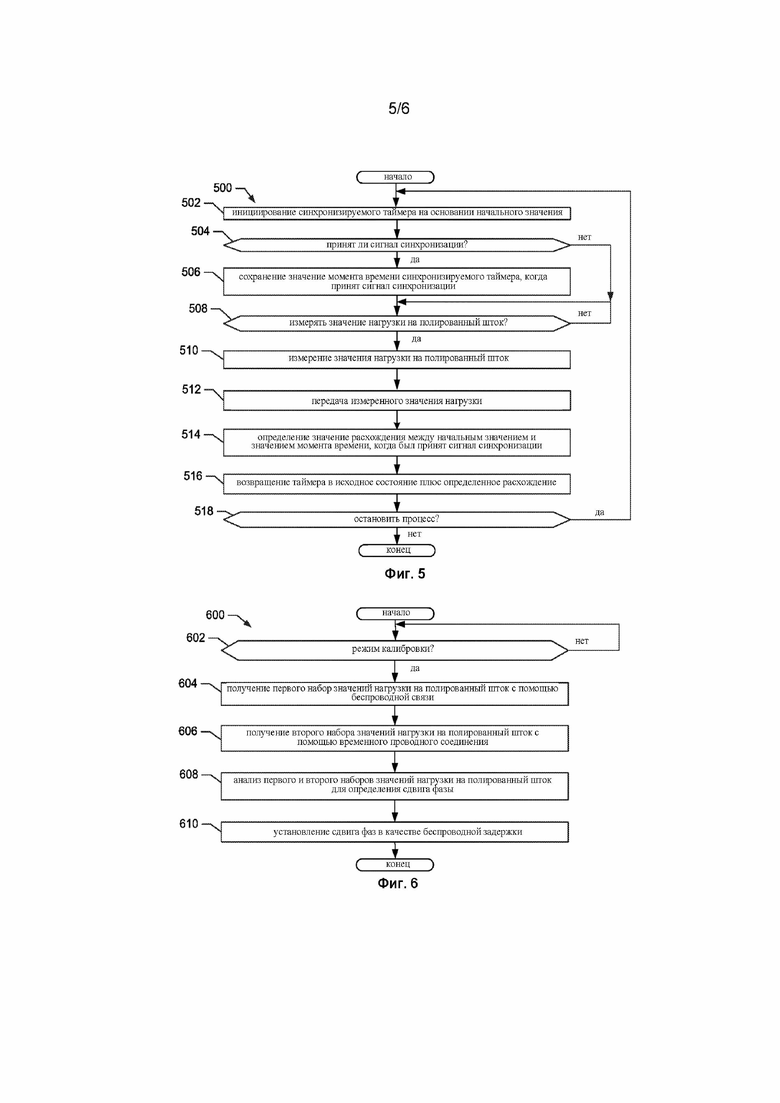
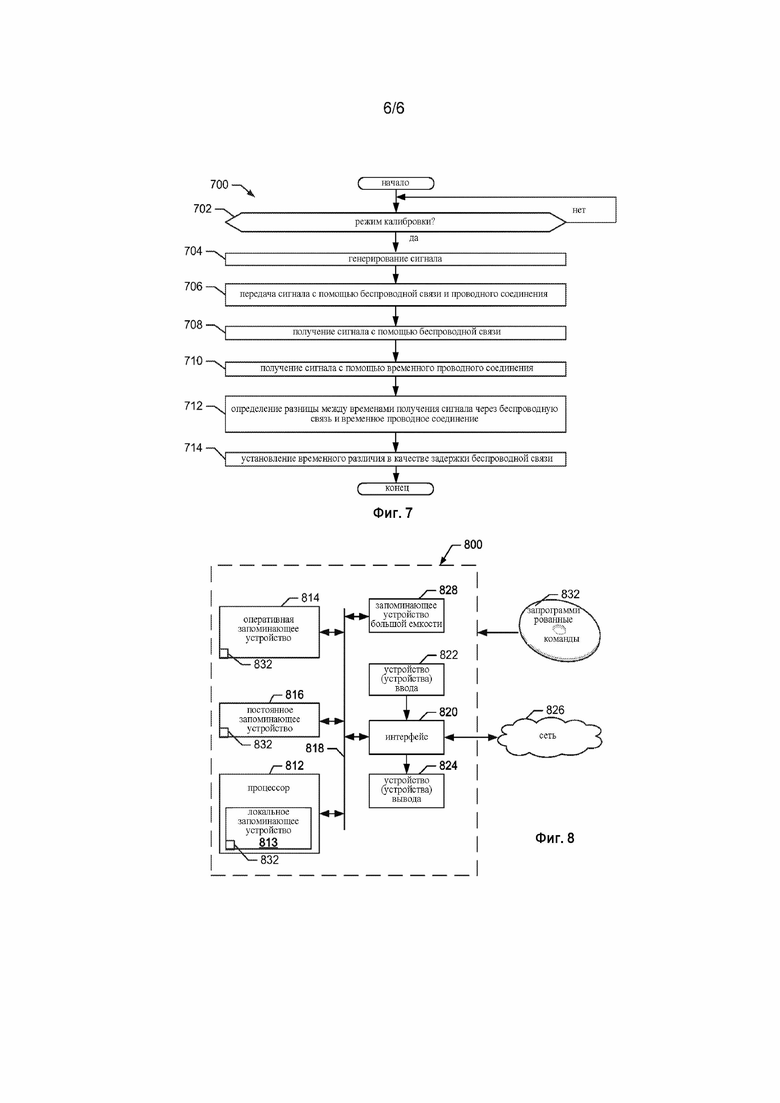
Группа изобретений относится к способу диагностики насосной установки путем попарного сопоставления значений положения полированного штока и нагрузки на него, контроллер штангового глубинного насоса для использования с насосной установкой, материальный считываемый компьютером носитель данных. Технический результат заключается в повышении эффективности насосной установки и точности динамометрической карты. Способ диагностики насосной установки путем попарного сопоставления значений положения полированного штока и нагрузки на него включает в себя: контроль посредством датчика положения по меньшей мере одного из углового положения плеча кривошипа насосной установки и количества оборотов за единицу времени двигателя насосной установки, при этом указанный датчик связан с возможностью передачи информации с контроллером штангового глубинного насоса насосной установки, определение с помощью контроллера штангового глубинного насоса первого значения положения полированного штока насосной установки на основании указанного по меньшей мере одного из углового положения плеча кривошипа и количества оборотов за единицу времени двигателя, присваивание первого значения времени первому значению положения, получение первых значений нагрузки на полированный шток от первого датчика нагрузки, связанного с полированным штоком, посредством контроллера штангового насоса и передающего устройства беспроводной связи, связанного с этим контроллером с возможностью передачи информации, присваивание вторых значений времени соответствующим значениям первых значений нагрузки, корректирование каждого из вторых значений времени до соответствующих третьих значений времени на основании значения задержки беспроводной связи указанного передающего устройства беспроводной связи, определение второго значения нагрузки, связанного с первым значением положения при первом значении времени на основании первых значений нагрузки и третьих значений времени, сопоставление второго значения нагрузки с первым значением положения с обеспечением контроллеру штангового насоса возможности получения динамометрической карты насоса, и эксплуатацию насосной установки, основанную на динамометрической карте насоса, полученной с использованием второго значения нагрузки и первого значения положения. 3 н. и 29 з.п. ф-лы, 8 ил.
1. Способ диагностики насосной установки путем попарного сопоставления значений положения полированного штока и нагрузки на него, включающий в себя:
контроль посредством датчика положения по меньшей мере одного из углового положения плеча кривошипа насосной установки и количества оборотов за единицу времени двигателя насосной установки, при этом указанный датчик связан с возможностью передачи информации с контроллером штангового глубинного насоса насосной установки,
определение с помощью контроллера штангового глубинного насоса первого значения положения полированного штока насосной установки на основании указанного по меньшей мере одного из углового положения плеча кривошипа и количества оборотов за единицу времени двигателя,
присваивание первого значения времени первому значению положения,
получение первых значений нагрузки на полированный шток от первого датчика нагрузки, связанного с полированным штоком, посредством контроллера штангового насоса и передающего устройства беспроводной связи, связанного с этим контроллером с возможностью передачи информации,
присваивание вторых значений времени соответствующим значениям первых значений нагрузки,
корректирование каждого из вторых значений времени до соответствующих третьих значений времени на основании значения задержки беспроводной связи указанного передающего устройства беспроводной связи,
определение второго значения нагрузки, связанного с первым значением положения при первом значении времени на основании первых значений нагрузки и третьих значений времени,
сопоставление второго значения нагрузки с первым значением положения с обеспечением контроллеру штангового насоса возможности получения динамометрической карты насоса,
и эксплуатацию насосной установки, основанную на динамометрической карте насоса, полученной с использованием второго значения нагрузки и первого значения положения.
2. Способ по п.1, отличающийся тем, что определение второго значения нагрузки включает в себя интерполяцию второго значения нагрузки на основании первого значения времени, первых значений нагрузки и третьих значений времени.
3. Способ по любому из предшествующих пунктов, дополнительно включающий в себя создание таблицы справочных данных с использованием первого значения положения, первого значения времени и второго значения нагрузки.
4. Способ по любому из предшествующих пунктов, отличающийся тем, что определение значения задержки беспроводной связи включает в себя определение задержки передачи между контроллером штангового глубинного насоса и указанным устройством беспроводной связи.
5. Способ по п.4, отличающийся тем, что определение задержки передачи включает в себя определение временного различия между получением первого сигнала от первого тензодатчика, предоставляемого устройством беспроводной связи, и вторым сигналом от второго тензодатчика, обеспечиваемого проводным соединением, первый сигнал и второй сигнал соответствуют нагрузке на полированный шток в одно и то же время.
6. Способ по п.4, отличающийся тем, что определение задержки передачи включает в себя определение временного различия между получением сигнала, предоставляемого устройством беспроводной связи с помощью беспроводной связи и получением сигнала, предоставляемого устройством беспроводной связи с помощью проводного соединения.
7. Способ по любому из предшествующих пунктов, дополнительно включающий в себя трансляцию сигнала синхронизации через определённые промежутки времени на устройство беспроводной связи.
8. Способ по п.7, дополнительно включающий в себя возвращение главного таймера в исходное состояние после трансляции сигнала синхронизации.
9. Способ по п.8, дополнительно включающий в себя передачу первых значений нагрузки на полированный шток контроллеру штангового глубинного насоса с помощью устройства беспроводной связи.
10. Способ по п.9, дополнительно включающий в себя инициирование синхронизируемого таймера к начальному значению и передачу измеренного значения нагрузки первых значений нагрузки, когда синхронизируемый таймер ведет отсчет от начального значения до нулевого значения, начальное значение определяется частотой, при которой первые значения нагрузки на полированный шток должны передаваться на контроллер штангового глубинного насоса.
11. Способ по п.10, дополнительно включающий в себя определение значения временной отметки возвращения в исходное состояние, когда устройство беспроводной связи принимает сигнал синхронизации.
12. Способ по п.11, дополнительно включающий в себя возвращение синхронизируемого таймера устройства беспроводной связи на значение, эквивалентное начальному значению плюс разница между начальным значением и значением временной отметки возвращения в исходное состояние.
13. Контроллер штангового глубинного насоса для использования с насосной установкой, причем этот контроллер содержит:
первый процессор, выполненный с возможностью:
контроля посредством датчика положения по меньшей мере одного из углового положения плеча кривошипа насосной установки и количества оборотов за единицу времени двигателя насосной установки, при этом указанный датчик связан с возможностью передачи информации с контроллером штангового глубинного насоса насосной установки,
определения с помощью контроллера штангового глубинного насоса первого значения положения полированного штока насосной установки на основании указанного по меньшей мере одного из углового положения плеча кривошипа и количества оборотов за единицу времени двигателя,
присваивания первого значения времени первому значению положения,
получения первых значений нагрузки на полированный шток от первого датчика нагрузки, связанного с полированным штоком, посредством передающего устройства беспроводной связи, связанного с контроллером штангового насоса,
присваивания вторых значений времени соответствующим значениям первых значений нагрузки,
корректирования каждого из вторых значений времени до соответствующих третьих значений времени на основании значения задержки беспроводной связи указанного передающего устройства беспроводной связи,
определения второго значения нагрузки, связанного с первым значением положения при первом значении времени на основании первых значений нагрузки и третьих значений времени,
сопоставления второго значения нагрузки с первым значением положения с получением динамометрической карты насоса,
и эксплуатации насосной установки, основанной на динамометрической карте насоса, полученной с использованием второго значения нагрузки и первого значения положения.
14. Контроллер штангового глубинного насоса по п.13, отличающийся тем, что процессор интерполирует второе значение нагрузки на основании первого значения времени, первых значений нагрузки и третьего времени.
15. Контроллер штангового глубинного насоса по п.13 или 14, отличающийся тем, что первый процессор генерирует таблицу справочных данных с использованием первого значения положения, первого значения времени и второго значения нагрузки.
16. Контроллер штангового глубинного насоса по любому из предшествующих пунктов, отличающийся тем, что устройство беспроводной связи выполнено с возможностью передачи первых значений нагрузки на полированный шток в контроллер штангового глубинного насоса.
17. Контроллер штангового глубинного насоса по любому из предшествующих пунктов, отличающийся тем, что первый процессор определяет задержку передачи между контроллером штангового глубинного насоса и устройством беспроводной связи для определения значения задержки беспроводной связи во время процесса калибровки.
18. Контроллер штангового глубинного насоса по п.17, отличающийся тем, что второй тензометрический динамометр соединен с возможностью передачи информации с контроллером штангового глубинного насоса с помощью временного проводного соединения во время процесса калибровки, и при этом первый процессор определяет временное различие между получением первого сигнала от первого тензодатчика, предоставляемого устройством беспроводной связи и второго сигнала от второго тензодатчика, обеспечиваемого временным проводным соединением, предоставляемого во время процесса калибровки, первый сигнал и второй сигнал представляют собой нагрузку на полированный шток в одно и то же время.
19. Контроллер штангового глубинного насоса по п.18, отличающийся тем, что первый процессор определяет значение задержки передачи путем определения временного различия между получением сигнала от беспроводного соединения, предоставляемого устройством беспроводной связи, и получением сигнала от устройства беспроводной связи с помощью временного проводного соединения, предоставленного в течение процесса калибровки.
20. Контроллер штангового глубинного насоса по любому из предшествующих пунктов, отличающийся тем, что первый процессор через определённые промежутки времени транслирует сигнал синхронизации на устройство беспроводной связи.
21. Контроллер штангового глубинного насоса по п.20, отличающийся тем, что первый процессор возвращает главный таймер в исходное состояние после трансляции сигнала синхронизации.
22. Контроллер штангового глубинного насоса по п.21, отличающийся тем, что второй процессор устройства беспроводной связи инициирует синхронизируемый таймер к начальному значению, и второй процессор передает измеренное значение нагрузки первых значений нагрузки, когда синхронизируемый таймер ведет отсчет от начального значения до нулевого значения, начальное значение определяется частотой, при которой первые значения нагрузки на полированный шток должны передаваться на контроллер штангового глубинного насоса.
23. Контроллер штангового глубинного насоса по п.22, отличающийся тем, что второй процессор определяет значение временной отметки возвращения в исходное состояние, когда устройство беспроводной связи принимает сигнал синхронизации.
24. Контроллер штангового глубинного насоса по п.23, отличающийся тем, что второй процессор возвращает синхронизируемый таймер устройства беспроводной связи на значение после сброса, эквивалентное начальному значению плюс разница между начальным значением и значением временной отметки возвращения в исходное состояние.
25. Материальный считываемый компьютером носитель данных, содержащий команды, которые при их выполнении приводят к тому, что машина выполняет:
контроль посредством датчика положения по меньшей мере одного из углового положения плеча кривошипа насосной установки и количества оборотов за единицу времени двигателя насосной установки, при этом указанный датчик связан с возможностью передачи информации с контроллером штангового глубинного насоса насосной установки,
определение с помощью контроллера штангового глубинного насоса первого значения положения полированного штока насосной установки на основании указанного по меньшей мере одного из углового положения плеча кривошипа и количества оборотов за единицу времени двигателя,
присваивание первого значения времени первому значению положения,
получение первых значений нагрузки на полированный шток от первого датчика нагрузки, связанного с полированным штоком, посредством контроллера штангового насоса и передающего устройства беспроводной связи, связанного с этим контроллером,
присваивание вторых значений времени соответствующим значениям первых значений нагрузки,
корректирование каждого из вторых значений времени до третьих значений времени на основании значения задержки беспроводной связи указанного передающего устройства беспроводной связи,
определение второго значения нагрузки, связанного с первым значением положения при первом значении времени на основании первых значений нагрузки и третьих значений времени,
сопоставление второго значения нагрузки с первым значением положения с обеспечением контроллеру штангового насоса возможности получения динамометрической карты насоса,
и эксплуатацию насосной установки, основанную на динамометрической карте насоса, полученной с использованием второго значения нагрузки и первого значения положения.
26. Считываемый компьютером носитель данных по п.25, содержащий команды, которые при их исполнении заставляют машину интерполировать второе значение нагрузки на основании первого значения времени, первых значений нагрузки и третьего времени.
27. Считываемый компьютером носитель данных по любому из предшествующих пунктов, содержащий команды, которые при их исполнении заставляют машину генерировать таблицу справочных данных с использованием первого значения положения, первого значения времени и второго значения нагрузки.
28. Считываемый компьютером носитель данных по любому из предшествующих пунктов, содержащий команды, которые при их исполнении заставляют машину определять временное различие между получением первого сигнала от первого тензодатчика, предоставленного устройством беспроводной связи, и вторым сигналом от второго тензодатчика, предоставленного по проводному соединению, для определения значения задержки беспроводной связи.
29. Считываемый компьютером носитель данных по любому из предшествующих пунктов, содержащий команды, которые при их исполнении заставляют машину генерировать и передавать первый сигнал в том же варианте, что и второй сигнал.
30. Считываемый компьютером носитель данных по любому из предшествующих пунктов, содержащий команды, которые при их исполнении заставляют машину определять временное различие между получением сигнала от устройства беспроводной связи, предоставленным беспроводной связью, и получением сигнала от устройства беспроводной связи, обеспечиваемым проводным соединением, для определения значения задержки беспроводной связи.
31. Считываемый компьютером носитель данных по любому из предшествующих пунктов, содержащий команды, которые при их выполнении заставляют машину через определённые промежутки времени транслировать сигнал синхронизации.
32. Считываемый компьютером носитель данных по п.31, содержащий команды, которые при их выполнении заставляют машину возвращать главный таймер в исходное состояние после трансляции сигнала синхронизации.
| Колосоуборка | 1923 |
|
SU2009A1 |
| US 9080438 B1, 14.07.2015 | |||
| УСТРОЙСТВО ДЛЯ АНАЛИЗА И УПРАВЛЕНИЯ СИСТЕМОЙ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО НАСОСА ПУТЕМ ОПРЕДЕЛЕНИЯ КАРТЫ НАСОСА | 2009 |
|
RU2556781C2 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |

