ИНФОРМАЦИЯ О РОДСТВЕННЫХ ЗАЯВКАХ
Настоящая заявка испрашивает приоритет по предварительной заявке США порядковый № 61/978,222, поданной 11 апреля 2014 г., включенной сюда посредством ссылки во всей своей полноте.
УРОВЕНЬ ТЕХНИКИ:
Область техники, к которой относится изобретение
Это раскрытие относится к медицинским инструментам и, более конкретно, к системе и способу для отслеживания кончика устройства под ультразвуковым управлением с использованием нескольких ультразвуковых датчиков, соединенных параллельно с помощью единого межсоединения (дорожки).
Описание предшествующего уровня техники
При ультразвуковой визуализации видимость иглы часто является очень плохой из-за зеркальной природы поверхности иглы, которая отражает лучи в сторону от зонда визуализации. Для смягчения упомянутой проблемы некоторые производители игл создали иглы со специальными эхогенными покрытиями, но улучшение визуализации ограничено. Производители систем ультразвуковой визуализации разработали алгоритмы, которые используют несколько визуализирующих пучков под различными углами, но улучшение ограничено, и такая стратегия подходит, главным образом, только для линейных матриц. Обе стратегии не помогают, когда иглу вводят перпендикулярно плоскости визуализации, или путь иглы имеет небольшое смещение относительно плоскости визуализации.
Одно решение, которое было предложено для визуализации кончика интервенционных инструментов, таких как иглы, а также катетеров, состоит в присоединении ультразвуковых приемников вблизи кончика инструмента. Хотя визуализирующий пучок охватывает поле зрения, сигналы от датчиков указывают на то, как близко пучки доходят до датчика. Данная информация используется для вычисления положения датчика относительно ультразвукового изображения с точностью позиционирования, превышающей 0,5 мм, даже в условиях, когда игла невидима в ультразвуковом изображении. Датчик не должен создавать помех функционированию устройства (например, в автоматическом устройстве для биопсии), то есть не блокировать просвет, не создавать помех механизмам и т.п.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В соответствии с настоящими принципами медицинское устройство включает в себя удлиненное тело и множество датчиков, конформно сформированных на удлиненном теле во множестве продольных положений вдоль удлиненного тела. Множество датчиков выполнено с возможностью генерирования сигналов в соответствии с детектированной энергией для системы визуализации. Единая электрическая дорожка соединяется с каждым из множества датчиков, подключенных параллельно с образованием матрицы датчиков вдоль удлиненного тела.
Другое медицинское устройство включает в себя удлиненное тело и три или более датчиков, конформно сформированных на удлиненном теле во множестве продольных положений вдоль удлиненного тела. Три или более датчиков отделены зазором от соседних датчиков. Каждый зазор имеет расстояние, предназначенное для содействия в вычислении того, какой датчик принял измеренный сигнал. Три или более датчиков выполнены с возможностью генерирования сигналов в соответствии с детектированной энергией для системы визуализации. Электрическая дорожка соединяется с тремя или более датчиками. Три или более датчиков подключены параллельно с образованием матрицы датчиков вдоль удлиненного тела.
Способ определения расшифровки принятых сигналов в медицинском устройстве включает в себя обеспечение медицинского устройства, содержащего удлиненное тела, множество датчиков, конформно сформированных на удлиненном теле во множестве продольных положений вдоль удлиненного тела, электрическую дорожку, соединяющуюся со множеством датчиков, подключенных параллельно с образованием матрицы датчиков вдоль удлиненного тела; генерирование сигналов в некотором положении системой визуализации; прием сигналов множеством датчиков; и разделение сигналов, принятых множеством датчиков, посредством использования изменяемых интервалов между множеством датчиков и их геометрических положений для определения, какой датчик какие сигналы принял.
Эти и другие цели, признаки и преимущества настоящего раскрытия будут очевидны из следующего подробного описания его примерных вариантов осуществления, которые следует изучать в связи с прилагаемыми чертежами.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Это раскрытие представит подробнее последующее описание предпочтительных вариантов осуществления со ссылкой на следующие фигуры, на которых:
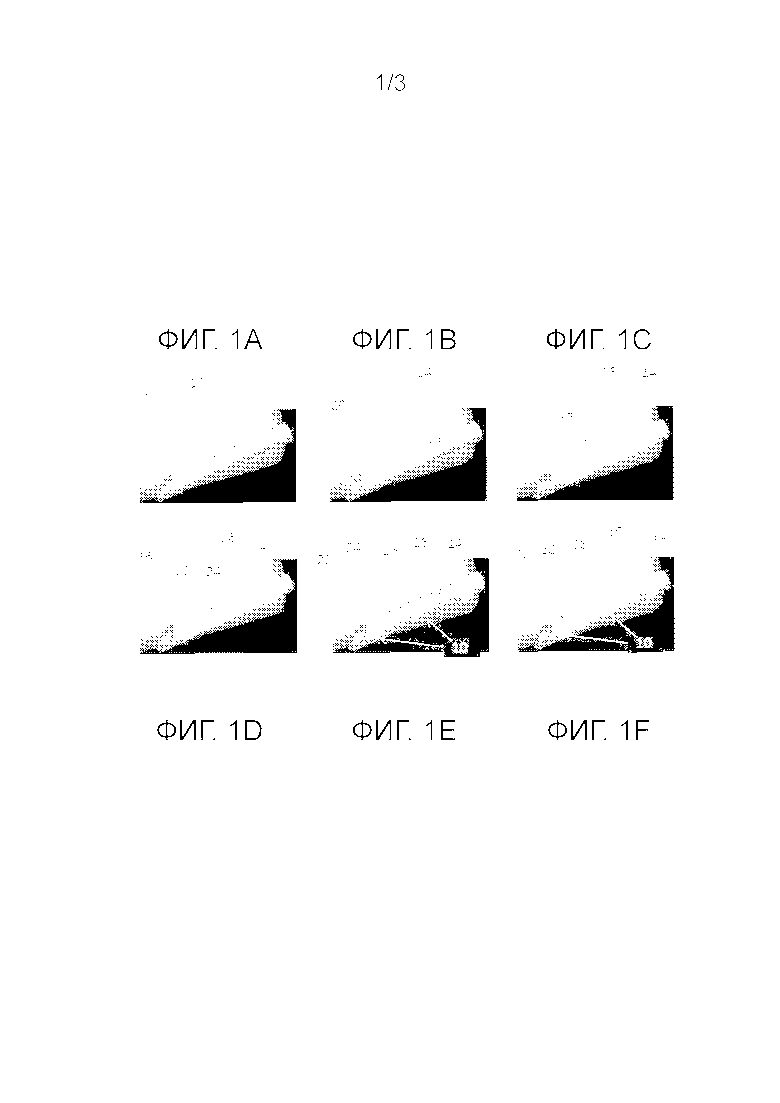
Фиг. 1A - вид в перспективе, представляющий иглу, где будет сформировано множество датчиков, в соответствии с настоящими принципами;
Фиг. 1B - вид в перспективе, представляющий иглу по фиг. 1A с сополимером (пьезоэлектрическим полимером), сформированным на ней в соответствии с настоящими принципами;
Фиг. 1C - вид в перспективе, представляющий иглу по фиг. 1B с диэлектрическим слоем (изолятором), сформированным на ней, в соответствии с настоящими принципами;
Фиг. 1D - вид в перспективе, представляющий иглу по фиг. 1C с верхними электродами, сформированными на сополимере, и единой дорожкой, сформированной на диэлектрическом слое, в соответствии с настоящими принципами;
Фиг. 1E - вид в перспективе, представляющий иглу по фиг. 1D с другим диэлектрическим слоем (изолятором), сформированным на дорожке, в соответствии с настоящими принципами;
Фиг. 1F - вид в перспективе, представляющий иглу по фиг. 1E с проводящим экраном, сформированным на ней, в соответствии с настоящими принципами;
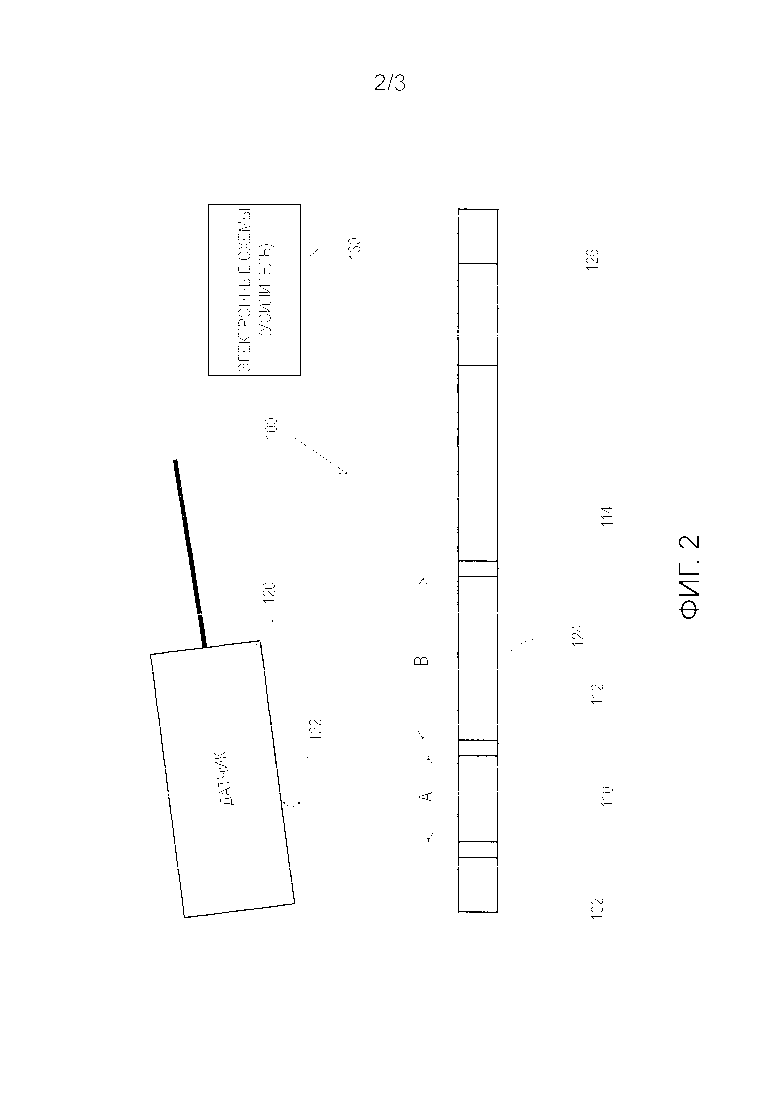
Фиг. 2 - схематический вид сбоку, представляющий иглу, где сформированы три или более датчиков, в соответствии с настоящими принципами; и
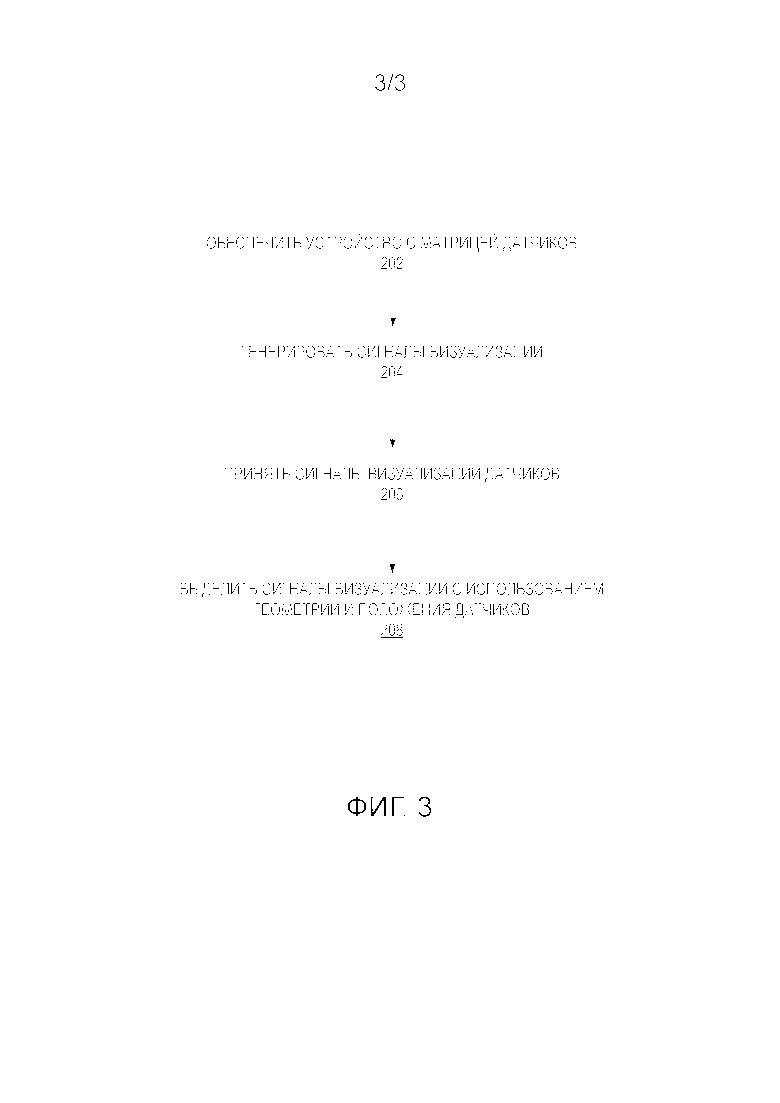
Фиг. 3 - блок-схема последовательности операций способа разделения сигналов, принятых медицинским устройством, имеющим множество датчиков, в соответствии с примерными вариантами осуществления.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
В соответствии с настоящими принципами предлагаются системы, устройства и способы для отслеживания иглы (или другого устройства) под ультразвуковым контролем посредством прикрепления небольших ультразвуковых приемников на устройстве. Настоящие принципы обеспечивают иглу, устройство или систему, которая(ое) включает в себя два 0 низкопрофильных датчиков с очень низкой стоимостью устройства и допускает масштабирование для массового производства с поддержанием низкой стоимости.
Выведение всех сигналов из отдельных датчиков на игле требует более сложного межсоединения между датчиками вдоль иглы и соединительными структурами на стыковочном концевом участке (проксимальном (ближайшем) концевом участке). Это особенно верно, если применяют дешевые пьезоэлектрические материалы, так как каждый датчик нуждается в собственном межсоединении типа микрополосковых линий, чтобы исключить сильные перекрестные помехи между датчиками.
Чтобы избежать такого усложнения и снизить стоимость изготовления иглы, датчики подключают вместе (параллельно) с использованием единой совместной сигнальной дорожки. Сильный сигнал будет наблюдаться, когда визуализирующий пучок падает на один из датчиков. Таким образом, когда игла находится, приблизительно, в плоскости визуализации, сильные сигналы должны наблюдаться в течение кадра визуализации. Знание порядка сканирования пучка дает возможность определения, какой сильный сигнал каким датчиком был получен.
В особенно полезных вариантах осуществления единая сигнальная дорожка совместно используется несколькими датчиками вдоль иглы или другого устройства. Знание схемы сканирования пучка применяется для выделения сигналов отдельных датчиков.
Ультразвуковые датчики могут быть сформированы на игле или другом устройстве и изготовлены с использованием пьезоэлектрического полимера, например, поливинилиденфторида (ПВДФ) или поливинилиденфторида-трифторэтилена (П(ВДФ-ТрФЭ)). П(ВДФ-ТрФЭ), который можно растворять в ацетоне и наносить на иглу по технологии испарения. Датчики являются высокоимпедансными и могут моделироваться по-отдельности в виде источника напряжения, включенного последовательно с небольшим конденсатором (например, 2,2 пФ). Такой датчик очень чувствителен к емкостной нагрузке электрической цепи межсоединения, и можно применять специальные электронные цепи компенсации емкости (подобно, например, методу экранированного возбуждения), чтобы избежать значительных потерь сигнала. Провод, проводящий сигнал, предпочтительно экранирован (например, включает в себя электрический экран вокруг проводника). Это можно обеспечить с использованием конфигурации микрополосковых линий.
Следует понимать, что настоящее изобретение будет описано применительно к медицинским инструментам; однако, принципы настоящего изобретения намного шире и применимы к любому инструменту, который может вмещать несколько низкопрофильных датчиков. В некоторых вариантах осуществления настоящие принципы применяют при отслеживании или анализе комплексных биологических или механических систем. В частности, настоящие принципы применимы к процедурам внутреннего отслеживания биологических систем и применимы к процедурам во всех областях тела, таких как легкие, желудочно-кишечный тракт, экскреторные органы, кровеносные сосуды и т.п. Элементы, изображенные на фигурах, можно реализовать в различных комбинациях аппаратного и программного обеспечения и обеспечивают функции, которые можно объединить в единственном элементе или нескольких элементах.
Кроме того, все утверждения здесь, излагающие принципы, аспекты и варианты осуществления изобретения, а также конкретные их примеры, предназначены для охвата их и структурных, и функциональных эквивалентов. Кроме того, предполагается, что такие эквиваленты включают в себя как известные в настоящее время эквиваленты, так и эквиваленты, которые будут разработаны в будущем (т.е. любые разработанные элементы, которые выполняют такую же функцию, независимо от структуры). Таким образом, например, специалистам в данной области техники будет очевидно, что блок-схемы, приведенные здесь, представляют концептуальные представления примерных системных компонентов и/или схемы, осуществляющей принципы изобретения. Аналогично, будет понятно, что блок-схемы последовательностей операций и тому подобное представляют различные процессы, которые могут быть по существу представлены на машиночитаемом носителе и, поэтому, выполнены компьютером или процессором, независимо от того, показан ли прямо или нет данный компьютер или процессор.
Кроме того, будет очевидно также, что когда элемент, такой как слой, область или материал, упоминается как находящийся «на» другом элементе или «поверх» него, он может находиться непосредственно на другом элементе, или могут также присутствовать промежуточные элементы. Напротив, когда элемент упоминается как находящийся «непосредственно на» другом элементе или «непосредственно поверх» него, никаких промежуточных элементов не присутствует. Будет также понятно, что, когда элемент упоминается как «соединенный (подключенный)» или «связанный» с другим элементом, он может быть непосредственно соединен (подключен) или связан с другим элементом или могут присутствовать промежуточные элементы. Напротив, когда элемент упоминается как «непосредственно соединенный (подключенный)» или «непосредственно связанный» с другим элементом, никаких промежуточных элементов не присутствует.
Ссылка в описании на «один вариант осуществления» или «вариант осуществления» настоящих принципов, а также другие его варианты, означает, что конкретный признак, структура, характеристика и так далее, описанные в связи с вариантом осуществления, содержатся в по меньшей мере одном варианте осуществления настоящих принципов. Таким образом, появления фразы «в одном варианте осуществления» или «в варианте осуществления», а также любые другие варианты, появляющиеся в различных местах по всему описанию, не обязательно все относятся к одному и тому же варианту осуществления.
Следует понимать, что использование любых из следующих символов или формулировок, как то «/», «и/или» и «по меньшей мере один из», например, в случаях «A/B», «A и/или B» и «по меньшей мере один из A и B», предназначено для охвата выбора только первого перечисленного элемента (A) или выбора только второго перечисленного элемента (B), или выбора обоих вариантов (A и B). В качестве дополнительного примера, в случаях «A, B и/или C» и «по меньшей мере один из A, B и C», данная формулировка предназначена для охвата выбора только первого перечисленного элемента (A) или выбора только второго перечисленного элемента (B), или выбора только третьего перечисленного элемента (C), или выбора только первого и второго перечисленных элементов (A и B), или выбора только первого и третьего перечисленных элементов (A и C), или выбора только второго и третьего перечисленных элементов (B и C), или выбора всех трех элементов (A и B, и C). Это может распространяться, как должно быть очевидно обычному специалисту в данной и связанных областях техники, на такое же множество перечисленных элементов.
Обратимся теперь к чертежам, на которых подобные числовые позиции представляют одни и те же или подобные элементы, и первоначально к фиг. 1A-1F, на которых приведены для наглядности перспективные виды, представляющие изготовление нескольких кольцевых датчиков 10 на кончике 12 иглы 14 в соответствии с одним вариантом осуществления. На оголенную иглу 14 (фиг. 1A), осаждают (пьезоэлектрический) слой 20 сополимера (фиг. 1B) поверх области, где предполагается сформировать датчики 10. Наносят диэлектрический слой 16 (фиг. 1C) с разрывами, секциями или промежутками 17, оставленными непокрытыми там, где предполагается сформировать датчики 10. Формируют верхние электроды 22 и соединительную дорожку 24 для датчиков 10 (фиг. 1D). На фиг. 1E сформирован другой диэлектрический слой 26, а на фиг. 1F показан нанесенный проводящий внешний экран 28.
Обратимся к фиг. 1A, на котором изображена игла 14 до формирования датчиков 10. Игла 14 предпочтительно включает в себя металл, такой как нержавеющая сталь, хотя возможно применение других хирургически совместимых материалов.
Обратимся к фиг. 1B, на которой участок кончика (дистальный концевой участок) иглы 14 покрыт пьезоэлектрическим сополимером 20. Это можно получить за счет применения технологического процесса покрытия погружением или аддитивного процесса нанесения материала (например, способа испарения или другого осаждения). После этого металлическая игла 14 служит в качестве нижнего электрода для сополимерных датчиков 10. В одном варианте осуществления сополимер включает в себя материал П(ВДФ-ТрФЭ), хотя возможно применение других подходящих материалов.
Обратимся к фиг. 1C, на которой диэлектрический слой или изолятор 16 осажден или напечатан на игле 14. Изолятор 16 может включать в себя любой подходящий диэлектрический материал, который сцепляется с иглой 14. Изолятор 16 может быть примерно 25-50 микрометров в толщину, хотя возможно применение других толщин. Изолятор 16 осаждают на иглу 14, оставляя непокрытыми секции 17 предпочтительно вблизи области кончика и на заданном проксимальном расстоянии от области кончика. Это можно выполнить множеством способом. Например, можно маскировать участок, и материал на секции 17 можно стравливать.
Обратимся к фиг. 1D, на которой нанесены верхний электрод 22 и сигнальная дорожка 24, соединяющаяся с верхними электродами 22. Верхние электроды 22 сформированы поверх сополимера 20 на дистальном концевом участке, а дорожка 24 сформирована поверх участка изолятора 16. Верхние электроды 22 соединены между собой дорожкой 24. Поэтому верхние электроды 22 подключены в параллельной конфигурации. Дорожка 24 может продолжаться проксимально вдоль иглы 14 (на изоляторе 16) и соединяться со стыковочным контактом или контактной площадкой (не показаны), которые также могут быть сформированы с использованием такого же технологического процесса, как для верхнего электрода 22 и дорожки 24. Верхние электроды 22, стыковочный контакт и дорожка 24 могут быть напечатаны с использованием проводящей краски. Можно также применять другие технологические процессы, такие как, например, осаждение из паровой фазы с маскированием или осаждение из паровой фазы и травление. Материал для верхнего электрода 22, стыковочного контакта и дорожки 24 также может включать в себя такие осажденные металлы, как серебро, золото и т.п. Верхний электрод 22, стыковочный контакт и дорожка 24 могут иметь толщину от менее чем один микрометр до нескольких микрометров.
Обратимся к фиг. 1E, на которой поверх дорожки 24 и слоя 16 изолятора сформирован другой изолятор 26. Данный изолятор 26 может быть изготовлен методом покрытия погружением от проксимального конца на игле 14. Изолятор 26 осаждают или печатают на игле 14. Изолятор 26 может включать в себя любой подходящий диэлектрический материал, который сцепляется с нижележащими материалами. Изолятор 26 может быть приблизительно 25-50 микрометров в толщину, хотя возможно применение других толщин. Изолятор 26 не формируют поверх крайнего дистального верхнего электрода 22.
Обратимся к фиг. 1F, на которой проводящий экран 28 нанесен поверх изолятора 26. Проводящий экран 28 может быть изготовлен осаждением из паровой фазы или покрытием погружением в проводящую краску. Требуется соблюдать осторожность, чтобы не покрыть кончик (дистальный концевой участок) иглы 14. Игла 14 и внешний экран 28 будут связаны друг с другом, так как они образуют возбуждаемый экран. Чтобы электрически изолировать верхний электрод 22 от окружения и обеспечить биосовместимость, всю иглу можно покрыть, например, париленом или другим внешним диэлектрическим материалом (не показан). Если париленовое покрытие (внешний диэлектрик) является очень тонким, то с верхнего электрода 22 до тела (где будет вводиться игла 14) и от тела до внешнего экрана 28 будет существовать емкостная связь. С помощью проводящего тела данная связь может создавать шунтирующую цепь через датчики 10 и тем самым формировать фильтр нижних частот. Требуется соблюдать осторожность, чтобы граничная частота (частота среза) была значительно выше представляющей интерес частоты ультразвука. В качестве альтернативы, диэлектрик 26 и внешний экран 28 могут быть выполнены находящимися поверх кончика, изолируя тем самым крайний дистальный верхний электрод 22 (но, возможно, немного ухудшают чувствительность, так как акустическая волна должна проходить сквозь них). При правильном выборе акустических свойств и толщины внешний диэлектрик (и/или изолятор 26) может служить в качестве акустического согласующего слоя.
Для диэлектрических слоев, например, изоляторов 16, 26 и внешнего диэлектрика полезно подобрать материал с относительно низкой диэлектрической постоянной (проницаемостью). Например, можно выбрать политетрафторэтилен (ПТФЭ) с диэлектрической постоянной примерно 2,1. Однако, проблему может составлять адгезия ПТФЭ к другим материалам. Можно применить другие материалы, такие как биосовместимый полипропилен (диэлектрическая постоянная 2,2). Многие пластики/полимеры имеют диэлектрическую постоянную близкую к 3,0 и также могут применяться. Полиуретан имеет значение немного выше 3,5 и перспективен для использования в настоящих применениях, так как существуют его версии для медицинского использования (применяемые для покрытия имплантируемых кардиостимуляторов). Кроме того, полиуретан обеспечивает хорошую адгезию ко многим материалам с высокой гладкостью и долговечностью и может осаждаться тонкими слоями с использованием подходящих растворителей. Можно также применять другие материалы.
Датчики 10 обеспечивают максимальную чувствительность благодаря большой разности импедансов датчика 10 и материала основы (например, пьезоэлектрического материала). Обеспечивают узкую дорожку 24, которая минимизирует емкостную нагрузку датчиков 10. Тонкая соединительная дорожка (межсоединение) 24 экранирована аналогично конфигурации микрополосковых линий, подлежащей оптимизации для снижения емкостного сопротивления. Датчики 10 могут быть чувствительными к привносимому шуму, так как игла 14, которая находится в электрическом контакте с тканью (когда наполнена жидкостью или содержит стилет), является частью межсоединения.
Датчики 10 могут включать в себя кольцо 20 из сополимера П(ВДФ-ТрФЭ), сформированное на игле 14. Стыковочный контакт или контактная площадка (не показаны, смотри фиг. 2) соединен(а) с верхним электродом 22 и сформирован(а) на стыковочном концевом участке (проксимальном концевом участке) и обеспечивает возможность подключения с низкой стоимостью утилизации. Для уменьшения потерь сигнала, обусловленных емкостной нагрузкой межсоединения, можно обеспечить специализированные электронные цепи.
На одной игле обеспечиваются несколько датчиков 10, которые используют общую дорожку 24. Хотя показано два датчика 10, вдоль иглы или другого устройства может быть сформировано более чем два датчика 10. Это обеспечивает возможность определения ориентации иглы, а также определения местоположения кончика иглы без необходимости размещения датчика очень близко к кончику. Вычисление местоположения кончика на основе сигналов из нескольких датчиков 10 должно также повысить точность измерения, а также обеспечить указание на достоверность при измерении. В результате немного усложняется производственный процесс, и возникают небольшие потери сигнала из-за дополнительной емкостной нагрузки нескольких датчиков.
Когда иглу 14 немного вводят в плоскость визуализации ультразвукового преобразователя (передающего устройства) или зонда, сначала в плоскости визуализации будет только датчик 10 на кончике иглы 14 (крайний дистальный датчик 10), и крайним дистальным датчиком 10 принимается единственный сильный сигнал для каждого кадра визуализации. Этот сигнал соотносится (ассоциирован) с кольцевым датчиком 10 на кончике (например, крайним дистальным датчиком 10). Затем, по мере того, как иглу 14 вводят глубже, временной сдвиг данного сигнала можно отслеживать, и можно поддерживать ассоциацию между сигналом и датчиком 10 на кончике. Когда второй датчик 10 входит в плоскость визуализации, и начинает появляться второй сигнал, данный сигнал происходит из датчика 10, расположенного ближе к стыковочному концу (проксимальному концу). Теперь этот сигнал можно также отслеживать от кадра к кадру, чтобы поддерживать ассоциацию между данным пиком и датчиком на стыковочной стороне.
В качестве альтернативы для выделения сигналов можно использовать некоторые физические характеристики или допущения. В большинстве случаев применения иглу 14 будут вводить относительно близко к сканирующей поверхности преобразователя, и ее ориентация будет иметь составляющую вдоль направления визуализирующего луча. Когда в течение кадра принимаются два сигнала, можно предположить, что сигнал датчика на кончике находится дальше от зонда (преобразователя), чем сигнал датчика на стыковочной стороне. Таким образом, сигнал, который имеет более длительную задержку относительно линейного триггера, является сигналом, который принадлежит датчику 10 на кончике.
Обратимся к фиг. 2, на которой показан схематический вид сбоку иглы 102 с множеством датчиков 110, 112, 114, соединенных единой дорожкой 124, в соответствии с одним вариантом осуществления. Хотя показаны три датчика 110, 112, 114, к единой дорожке 124 можно подсоединять большее число датчиков. Для выделения сигналов можно применять те же способы, которые описаны выше.
Кроме того, существуют другие механизмы, которые можно применять для выделения сигналов. Например, если датчики разнесены на конкретные расстояния или с конкретными отношениями, для выделения сигналов можно использовать изменяемый интервал. В конструкции 100 иглы с тремя датчиками интервал между датчиком 110 на кончике и средним датчиком 112 равен A (например, 5 мм), а между средним датчиком 112 и датчиком 114 со стыковочной стороны равен B (например, 10 мм). Возможна оценка задержки между сигналом линейного триггера (для системы ультразвуковой визуализации) и сигналом от каждого сильного сигнала. Упомянутая задержка пропорциональна расстоянию между датчиком 110, 112 или 114 и датчиком 120. Разность в этой задержки для линейной матрицы пропорциональна как интервалу A или B между датчиками 110, 112, 114, так и углу 122 иглы 114 относительно зонда 120. В предположении жесткой иглы угол является одинаковым для всех датчиков 110, 112, 114. Таким образом, разность в задержке между датчиками 110 и 112, очевидно, должна составлять половину от разности в задержке между датчиками 112 и 114 (например, при равномерном разнесении), и данную информацию можно использовать для выделения сигнала.
На проксимальном концевом участке иглы 102 (или другого удлиненного устройства сформирован стыковочный контакт 126. Дорожка 124 соединяется со стыковочным контактом 126, и стыковочный контакт 126 соединяется с электронными цепями 130, например, усилителем или другими приемными цепями. Электронные цепи 130 могут также соединяться с экраном (не показан) поверх дорожки 124 и иглы 102 с использованием соединителя или соединителей. Электрические соединения могут изменяться в зависимости от применяемых цепей и конструкции иглы.
В случае множества (>3) датчиков, разность по времени между всеми возможными комбинациями датчиков можно использовать для выделения сигналов. Обычному специалисту в данной области техники будет очевидно многообразие альтернативных вариантов осуществления в пределах существенных элементов раскрытия. Например, датчики не должны осаждаться непосредственно на поверхность иглы. В одном примере можно сформировать изолятор и слой металлизации, формирующий внутренний экран, на которые (сверху) осаждают датчики, так что они изолированы от стержня иглы. В другом примере, на иглу можно осаждать изолирующий слой, затем на изоляторе формируют совместно используемую сигнальную дорожку и нижние электроды, с последующим формированием пьезоэлектрического материала для датчиков. Можно обеспечить внешний проводящий экран, который также образует верхний электрод для всех датчиков.
В одном варианте осуществления на игле можно применять более чем одну совместно используемую дорожку, например, датчики под номерами один, три, пять совместно используют одну дорожку, а датчики под номерами два, четыре, шесть совместно используют другую дорожку. Это может увеличить расстояния между датчиками в наборе и сделать разделение сигналов более надежным. Датчики не обязательно должны быть выполнены из ПВДФ или сополимера. Датчики могут, например, включать в себя PZT (цирконат-титанат свинца) или другой пьезоэлектрический материал, или могут относиться к совершенно другому типу датчиков, например, емкостным ультразвуковым преобразователям, получаемым методом микрообработки (CMUT).
Если применяются аддитивные методы изготовления, такие как методы конформного микродозирования, нанесения краски распылением, струйной печати, возможно, было бы полезно осаждать материалы для микрополосок (дорожек) межсоединений поверх небольшой секции окружности (периферии). Например, если диэлектрик наносят с использованием метода распыления краски или аэрографом, то широкий рисунок распыления может приводить к осаждению на нескольких иглах одновременно и будет естественным образом создавать конусообразное покрытие, охватывающее 180 градусов по окружности. В качестве альтернативы, узкий рисунок распыления с помощью аэрографа может создавать конусообразный диэлектрический слой поверх намного меньшей зоны по окружности, например, 45 градусов. Другими словами, кольцевая структура не будет охватывать всю иглу или устройство, а будет занимать секцию на окружности.
В одном варианте осуществления, как, например, на фиг. 1A-1F, можно нанести первый диэлектрик, охватывающий 45 градусов, затем можно нанести узкую дорожку с помощью, например, микродозирующей форсунки. Затем можно нанести другой диэлектрик, охватывающий едва лишь 30 градусов. И, наконец, можно нанести проводящий внешний экран, охватывающий едва лишь 90 градусов и занимающий кромки для электрического контакта с иглой. Это может создать микрополосковую структуру, заключенную в гладкую оболочку и охватывающую 90 градусов по окружности, обеспечивая надежное экранирование при одновременной экономии материала и сокращении времени осаждения.
На стыковочном концевом участке оголенная поверхность иглы, стыковочный контакт или электрод и внешний экран могут формировать три кольцевых контактных площадки, на которых может фиксироваться небольшой соединитель. Данная конструкция минимизирует стоимость соединителя на одноразовую иглу и переносит более дорогую часть соединения на фиксатор многоразового использования (не показан), который будет соединяться с иглой и другими контактами. Данный вариант осуществления можно реализовать с использованием аддитивных технологий изготовления, таких как, например, системы конформного микродозирования или методы струйного осаждения.
Для сохранения низкой стоимости изделия, применяемые материалы должны быть дешевыми, а процесс изготовления должен быть высокоавтоматизированным и крупносерийным для исключения повышения стоимости рабочей силы и оборудования. С учетом приведенных целей, подходящими материалами для производства датчиков являются такие пьезоэлектрические полимеры, как ПВДФ и П(ВДФ-ТрФЭ). Способность прилагаемого напряжения вызывать движение в образце ПВДФ используется для получения ультразвуковых волн, которые можно детектировать с использованием гидрофона на основе ПВДФ. Существует множество факторов, подлежащих рассмотрению при принятии решения о том, использовать ли пьезоэлектрический материал на основе керамики или ПВДФ в данном случае медицинского применения. На низких частотах следует применять более толстые мембраны из ПВДФ для учета резонанса. Датчик на ПВДФ можно моделировать как источник напряжения, включенный последовательно с емкостью, и для более толстых датчиков с небольшой площадью поверхности это может приводить к небольшому емкостному сопротивлению. Следовательно, в общем представляется, что ПВДФ имеет преимущества для медицинского ультразвукового исследования, выполняемого в частотном диапазоне 25-100 МГц. По сравнению с PZT, ПВДФ ограничен с точки зрения способности передавать высокие интенсивности ультразвука.
ПВДФ обладает подходящей характеристикой даже на пониженных частотах, например, в случае гидрофонов на основе ПВДФ для детектирования ультразвуковых волн. По сравнению с PZT, который также можно применять в некоторых вариантах осуществления, ПВДФ имеет намного большую полосу частот и поэтому не будет настолько сильно искажать переходную характеристику волны. В данном случае проблему низкой выходной емкости можно решить встраиванием предусилителя на полевом транзисторе (FET) с высоким входным импедансом в непосредственной близости от датчика. Постоянная d33, деформация в направлении толщины, образующаяся при приложении напряжения, для пьезоэлектрической керамики примерно на порядок величины больше, чем для пьезоэлектрических полимеров. Один недостаток пьезоэлектрической керамики заключается в ее высоком акустическом импедансе, примерно 30 МРэл (1 МРэл=106 кг/м2с) по сравнению с примерно 1,5 МРэл для ткани тела. Это несоответствие импедансов можно компенсировать с помощью четвертьволновых согласующих слоев, но они могут ослабить ультразвуковой импульс из-за адгезивных слоев и способов конструирования. Акустический импеданс пьезоэлектрической пленки составляет примерно 4 МРэл, т.е. обеспечивает намного лучшее согласование. Кроме того, керамика является хрупкой и не может принимать требуемые геометрические формы. ПВВДФ является конформным и гибким дешевым материалом с акустическим импедансом, близким к ткани, который не требует согласующих слоев, в отличие от PZT.
Производство пьезоэлектрических пленок ПВДФ осуществляют в условиях чистой комнаты и начинают с экструзии расплава гранул полимера ПВДФ в форму листов. Затем выполняют этап вытяжки, на котором толщину листа уменьшают примерно в 5 раз. Данная вытяжка, выполняемая при температуре намного ниже температуры плавления полимера, приводит к упаковке цепей молекул в параллельные кристаллографические плоскости, называемой «бета-фазой». Затем, для получения высоких уровней пьезоэлектрической активности, полимер в бета-фазе подвергают воздействию очень сильных электрических полей для выравнивания кристаллитов относительно поляризующего поля. На этапе вытяжки пленку можно вытягивать только вдоль одного направления (одноосная пленка) или в обоих направлениях (двухосная пленка). Двухосные пленки будут обладать пьезоэлектрической чувствительностью, главным образом, только в направлении толщины, в то время как одноосная пленка будет чувствительной к деформации как в направлении толщины, так и в нерастянутом планарном направлении.
Разработаны новые сополимеры ПВДФ, которые допускают использование при более высоких температурах (например, вплоть до 135 градусов Цельсия для некоторых сополимеров, в отличие от 100 градусов Цельсия для обычного ПВДФ). Хотя данные температуры не имеют места при клиническом использовании, более высокие допустимые температуры могут быть преимуществом при упрощении процесса изготовления и стерилизации. Сополимеры ПВДФ являются поляризуемыми без вытяжки, и можно изготавливать очень тонкие пленки до 200 Ангстрем (20 нм) с использованием методов нанесения покрытий центробежным литьем, и такие тонкие пленки невозможно получить со стандартным ПВДФ. Кроме того, сополимер имеет немного более высокую пьезоэлектрическую постоянную для моды колебаний по толщине, что приводит к примерно на 10% более высокой чувствительности по сравнению с ПВДФ.
Существует несколько электронных стратегий для уменьшения влияния паразитной емкости на функциональные характеристики. Один такой метод называется «возбуждаемым экраном». Ключевым элементом данного способа является уменьшение потока паразитного тока из провода, проводящего представляющий интерес сигнал, посредством минимизации электрического поля, окружающего упомянутый провод. При этом используют в общей сложности три проводника в межсоединении, заземляющее соединение, сигнальный провод и экран, окружающий сигнальный провод. Напряжение на сигнальном проводе измеряют, и экран возбуждается точной копией данного напряжения. Даже несмотря на то, что сигнальный провод имеет паразитную емкость относительно экрана, паразитный ток в данном случае отсутствует, так как отсутствуют изменения напряжения на паразитной емкости. Провод заземления поддерживается под постоянным напряжением посредством источника питания усилителя и не возбуждается датчиком, следовательно, его паразитная емкость относительно других структур не оказывает вредного влияния. Другой метод включает в себя применение усилителя с компенсацией емкости (CCA).
Настоящие принципы описаны в отношении иглы, а более конкретно иглы для биопсии. Однако, настоящие принципы можно применить к любому инструменту, где требуется датчик (приемник), передающее устройство или преобразователь. Такие устройства могут включать в себя катетеры, проволочные направители, эндоскопы, имплантируемые устройства и т.п. Настоящие принципы могут обеспечить относительно дешевое устройство со встроенным датчиком, конформно накладываемым на внешнюю поверхность. Для сохранения низкой стоимости изделия, применяемые материалы должны быть дешевыми, и процесс изготовления должен быть высокоавтоматизированным и крупносерийным для исключения повышения стоимости рабочей силы и оборудования. Устройства в соответствии с настоящими принципами обеспечивают низкий форм-фактор, который конформно образуется и накладывается на медицинское устройство или инструмент. В особенно полезных вариантах осуществления настоящие принципы применяются для интервенций иглой под ультразвуковым контролем, например, для РЧ (радиочастотной) абляции, биопсии печени, блокады нервов, доступа к сосудам, дренажа абсцессов и т.п.
Обратимся к фиг. 3, на которой показан способ расшифровки принятых сигналов в медицинском устройстве в соответствии с примерными вариантами осуществления. На этапе 202 обеспечивают медицинское устройство, имеющее удлиненное тело, множество датчиков, конформно сформированных на удлиненном теле во множестве продольных положений вдоль удлиненного тела, электрическую дорожку, соединяющуюся с множеством датчиков, подключенных параллельно с образованием матрицы датчиков вдоль удлиненного тела. Число датчиков может составлять два или более или три или более. На этапе 204 системой визуализации генерируют сигналы в некотором положении. Система визуализации предпочтительно включает в себя ультразвуковую систему, хотя настоящие принципы могут принести пользу в других системах визуализации. На этапе 206 сигналы принимаются множеством датчиков. На этапе 208 сигналы, принятые множеством датчиков, разделяют с использованием изменяемых интервалов между множеством датчиков и их геометрических положений для определения, какой датчик какие сигналы принял. Изменяемые интервалы между датчиками и геометрические положения датчиков обеспечивают разные задержки, по которым определяют датчики в сигналах. В одном варианте осуществления удлиненное тело включает в себя иглу, и для определения, какой датчик какие сигналы принял, используется расстояние введения иглы.
При интерпретации прилагаемой формулы изобретения следует понимать, что:
a) формулировка «содержащий» не исключает присутствия других элементов или операций, кроме перечисленных в данном пункте формулы изобретения;
b) признак единственного числа элемента не исключает присутствия множества таких элементов;
c) никакие ссылочные позиции в формуле изобретения не ограничивают его объем;
d) несколько «средств» могут быть представлены одними и теми же элементом или аппаратно- или программно-реализованными структурой или функцией; и
e) никакая конкретная последовательность операций не предполагается обязательной, если не указано конкретно.
Описав предпочтительные варианты осуществления для иглы с несколькими датчиками (которые подразумеваются как примерные и неограничивающие), следует отметить, что специалистами в данной области техники в свете указанных сведений могут быть выполнены модификации и варианты. Поэтому, следует понимать, что в конкретные варианты осуществления раскрытия могут быть внесены изменения, которые находятся в пределах объема вариантов осуществления, раскрытых здесь, как очерчено прилагаемой формулой изобретения. Таким образом, описав детали и особенности, требуемые патентными законами, то, что заявлено и нуждается в защите патентом, излагается в прилагаемой формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИГЛА С ДАТЧИКАМИ НА ОСНОВЕ ПЬЕЗОЭЛЕКТРИЧЕСКИХ ПОЛИМЕРОВ | 2015 |
|
RU2690616C2 |
| СПОСОБ НАНЕСЕНИЯ ПОКРЫТИЯ НА МЕДИЦИНСКОЕ УСТРОЙСТВО, ВХОДЯЩЕЕ В КОНТАКТ С ТКАНЯМИ ТЕЛА | 2019 |
|
RU2761440C2 |
| Определение и калибровка длины иглы для системы наведения иглы | 2012 |
|
RU2609203C2 |
| СЛОИСТОЕ ИЗДЕЛИЕ С ПРЕОБРАЗОВАТЕЛЕМ | 2016 |
|
RU2657114C1 |
| МЕДИЦИНСКОЕ ЗОНДОВОЕ УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОЙ ВИЗУАЛИЗАЦИИ | 2016 |
|
RU2723941C2 |
| Узел иглы, включающий выровненный магнитный элемент | 2013 |
|
RU2669621C2 |
| ФОРМИРОВАНИЕ КОНТАКТА УЛЬТРАЗВУКОВОГО УСТРОЙСТВА | 2017 |
|
RU2742967C2 |
| УСТРОЙСТВО, СИСТЕМА И СПОСОБ ДЛЯ ВИЗУАЛИЗАЦИИ И ЛЕЧЕНИЯ С ИСПОЛЬЗОВАНИЕМ ОПТИЧЕСКОГО ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ | 2011 |
|
RU2589625C2 |
| УЛЬТРАЗВУКОВОЕ ПРЕОБРАЗОВАТЕЛЬНОЕ УСТРОЙСТВО И СПОСОБ ПЕРЕДАЧИ И ПРИЕМА УЛЬТРАЗВУКОВЫХ ВОЛН | 2014 |
|
RU2658127C2 |
| МЕДИЦИНСКОЕ УЛЬТРАЗВУКОВОЕ УСТРОЙСТВО С ОПРЕДЕЛЕНИЕМ УСИЛИЯ | 2010 |
|
RU2556975C2 |
Группа изобретений относится к медицине. Способ определения расшифровки принятых сигналов в медицинском устройстве для ультразвуковой визуализации организма осуществляют с помощью устройства. Медицинское устройство для ультразвуковой визуализации организма содержит удлиненное тело, электрический изолятор, множество датчиков и единую электрическую дорожку. Электрический изолятор размещен поверх удлиненного тела и имеет множество разрывов по своей длине. Датчики конформно размещены на удлиненном теле во множестве продольных положений вдоль удлиненного тела и выполнены с возможностью генерирования сигналов в соответствии с детектированной энергией для системы визуализации. Каждый датчик расположен в соответствующем одном из упомянутых разрывов и включен в матрицу датчиков вдоль удлиненного тела. Электрическая дорожка соединяется с каждым из множества датчиков. Способ содержит обеспечение медицинского устройства, генерирование сигналов в некотором положении системой визуализации, прием сигналов упомянутым множеством датчиков и разделение сигналов, принятых упомянутым множеством датчиков, путем использования изменяемых интервалов между датчиками упомянутого множества и их геометрических положений для определения того, какой датчик какие сигналы принял. Обеспечивается устройство и способ определения расшифровки принятых сигналов в медицинском устройстве для ультразвуковой визуализации организма с использованием ультразвуковых датчиков, соединенных параллельно с помощью единой дорожки и не создающих помех функционированию устройства. 3 н. и 17 з.п. ф-лы, 3 ил.
1. Медицинское устройство для ультразвуковой визуализации организма, содержащее:
удлиненное тело (14);
электрический изолятор, размещенный поверх удлиненного тела и имеющий множество разрывов по своей длине;
множество датчиков (10), конформно размещенных на удлиненном теле во множестве продольных положений вдоль удлиненного тела, при этом упомянутое множество датчиков выполнено с возможностью генерирования сигналов в соответствии с детектированной энергией для системы визуализации, причем каждый из множества датчиков расположен в соответствующем одном из упомянутого множества разрывов; и
единую электрическую дорожку (24), соединяющуюся с каждым из множества датчиков, подключенных параллельно с образованием матрицы датчиков вдоль удлиненного тела.
2. Устройство по п. 1, в котором датчики упомянутого множества включают в себя датчики на основе пьезоэлектрического полимера.
3. Устройство по п. 1, в котором каждый из упомянутого множества датчиков конформно размещен вокруг по меньшей мере части окружности устройства.
4. Устройство по п. 1, дополнительно содержащее проводящий экран (28), размещенный поверх упомянутой единой электрической дорожки на диэлектрическом материале.
5. Устройство по п. 4, в котором проводящий экран образует общий электрод для упомянутого множества датчиков.
6. Устройство по п. 1, в котором удлиненное тело (14) включает в себя иглу, и эта игла образует электрод для упомянутого множества датчиков.
7. Устройство по п. 1, в котором единая электрическая дорожка (24) соединяется со стыковочным контактом (126), обеспечивающим электрический контакт для подключения к электронным цепям для обработки и измерения сигналов от упомянутого множества датчиков.
8. Устройство по п. 1, в котором упомянутая единая электрическая дорожка включает в себя одно из проводящей краски или нанесенного слоя.
9. Медицинское устройство для ультразвуковой визуализации организма, содержащее:
удлиненное тело (102);
электрический изолятор, размещенный поверх удлиненного тела и имеющий множество разрывов по своей длине;
три или более датчиков (110, 112, 114), конформно размещенных на удлиненном теле во множестве продольных положений вдоль удлиненного тела, причем упомянутые три или более датчиков отделены от соседних датчиков соответствующим одним из множества зазоров (A, B), причем каждый из множества зазоров имеет расстояние, предназначенное для содействия в вычислении того, какой датчик принял измеренный сигнал, при этом упомянутые три или более датчиков выполнены с возможностью генерирования сигналов в соответствии с детектированной энергией для системы визуализации, причем каждый из упомянутых трех или более датчиков расположен в соответствующем одном из упомянутого множества разрывов; и
электрическую дорожку (124), соединяющуюся с упомянутыми тремя или более датчиками, подключенными параллельно с образованием матрицы датчиков вдоль удлиненного тела.
10. Устройство по п. 9, в котором упомянутые три или более датчиков включают в себя датчики на основе пьезоэлектрического полимера.
11. Устройство по п. 9, в котором каждый из упомянутых трех или более датчиков конформно размещен вокруг по меньшей мере части окружности устройства.
12. Устройство по п. 9, дополнительно содержащее проводящий экран (28), размещенный поверх упомянутой электрической дорожки на диэлектрическом материале.
13. Устройство по п. 12, в котором проводящий экран образует общий электрод для упомянутых трех или более датчиков.
14. Устройство по п. 9, в котором удлиненное тело (102) включает в себя иглу, и эта игла образует электрод для упомянутых трех или более датчиков.
15. Устройство по п. 9, в котором упомянутая электрическая дорожка (124) соединяется со стыковочным контактом (126), обеспечивающим электрический контакт для подключения к электронным цепям для обработки и измерения сигналов от упомянутых трех или более датчиков.
16. Устройство по п. 9, в котором зазоры (A, B) между соседними датчиками не равны по длине.
17. Устройство по п. 9, в котором упомянутая электрическая дорожка включает в себя одно из проводящей краски или нанесенного слоя.
18. Способ определения расшифровки принятых сигналов в медицинском устройстве для ультразвуковой визуализации организма, содержащий:
обеспечение (202) медицинского устройства, имеющего удлиненное тело, множество датчиков, конформно размещенных на удлиненном теле во множестве продольных положений вдоль удлиненного тела, электрическую дорожку, соединяющуюся со множеством датчиков, подключенных параллельно с образованием матрицы датчиков вдоль удлиненного тела;
генерирование (204) сигналов в некотором положении системой визуализации;
прием (206) сигналов упомянутым множеством датчиков; и
разделение (208) сигналов, принятых упомянутым множеством датчиков, путем использования изменяемых интервалов между датчиками упомянутого множества и их геометрических положений для определения того, какой датчик какие сигналы принял.
19. Способ по п. 18, в котором изменяемые интервалы (A, B) между датчиками упомянутого множества и их геометрические положения обеспечивают разные задержки, по которым определяют датчики в упомянутых сигналах.
20. Способ по п. 18, в котором удлиненное тело (102) включает в себя иглу, и для определения того, какой датчик какие сигналы принял, применяют расстояние введения иглы.
| WO 2004069030 A2, 19.08.2004 | |||
| US 4706681 A, 17.11.1987 | |||
| US 2003060700 A1, 27.03.2003 | |||
| US 4697595 A, 06.10.1987 | |||
| WO 2011085180 A2, 14.07.2011 | |||
| СПОСОБ ДИАГНОСТИКИ СТАДИИ ИНВАЗИИ РАКА МОЧЕВОГО ПУЗЫРЯ | 2007 |
|
RU2332168C1 |
| СПОСОБ ИНЪЕКЦИИ В МЯГКИЕ ТКАНИ | 2007 |
|
RU2328318C1 |

