ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к устройствам для медицинской визуализации и, в частности, к системам для наблюдения с помощью ультразвука положения внутренних зондов, применяемых во время хирургической операции или исследования.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Ультразвук часто применяется как средство для направления таких хирургических устройств, как иглы или катетеры, во время минимально инвазивных процедур. Например, процедуры хирургической биопсии обычно выполняются с применением ультразвуковой визуализации, чтобы предоставлять врачу возможность видеть ткань, отбираемую на биопсию.
Одно из преимуществ ультразвуковой визуализации по сравнению с рентгеновской визуализацией, при использовании во время хирургической операции, состоит в том, что ультразвук обеспечивает контраст мягких тканей и информацию по глубине, и при этом не воздействует ионизирующим излучением. Однако, идентифицировать интервенционные устройства в ультразвуковом изображении часто бывает сложно, поскольку многие устройства типа игл являются зеркальными отражателями и не отражают ультразвуковой пучок обратно к преобразователям.
Кроме того, такие устройства, как катетеры, могут представляться на ультразвуковых изображениях подобно тканевым структурам, также в зависимости от установочных параметров визуализации. Для совершенствования визуализации устройств применяют различные методы, например, нанесение эхогенных покрытий или травление.
Известная концепция отслеживания иглы в ультразвуковом устройстве, например, посредством покрытия наконечника иглы пьезоэлектрическим материалом, который вырабатывает электрический сигнал при «активации» энергией ультразвука. В качестве альтернативы, ультразвуковой преобразователь можно закреплять к биопсийной игле, чтобы сделать иглу излучающей и/или принимающей ультразвуковые волны во взаимодействии с визуализирующей сканирующей головкой.
Альтернативой приведенным активным способам является пассивное наблюдение биопсийной иглы с использованием изображений в цветном допплеровском режиме. Как выяснилось, ручное манипулирование биопсийной иглой или проволочным направителем обеспечивает цветное изображение, которое соответствует стержню иглы. Однако, изображение иглы имеет высокую четкость только тогда, когда иглой манипулируют, и является крупнозернистым представлением всего стержня иглы.
Предлагалась непрерывная визуализация наконечника иглы посредством механического возвратно-поступательного перемещения иглы. Несинхронизированное возвратно-поступательное перемещение биопсийной иглы (или стилета) вызывает постоянное изменение муаровой картины, когда допплеровское представление наконечника иглы отображается в цвете. Система, использующая данный метод, описана в документе US 5 095 910.
Заявка US2010/0305432 описывает другую систему и способ для определения местоположения медицинских устройств in vivo с помощью ультразвуковой визуализации в трехмерном допплеровском режиме. В данном способе, трехмерная визуализация в допплеровском режиме применяется, чтобы обнаруживать медицинское устройство, связанное с колебательным элементом для возбуждения колебаний на дистальном конце устройства. Разные части медицинского устройства могут быть выполнены с возможностью колебаний с разными частотами. Это обеспечивают посредством сегментов материала с разными плотностями, которые ослабляют колебания, генерируемые колебательным модулем на проксимальном конце.
Концепция обнаружения колебательного устройства с использованием трехмерной цветной допплеровской визуализации в реальном времени предложена в IEEE Trans Ultrason Ferroelectr Freq Control. 2008; 55(6): 1355-1362.
Для систем допплеровской визуализации предложены различные применения колебательных элементов, например:
оборудование колебательного элемента на минимально инвазивном устройстве (катетере, игле, проволочном направителе) для обеспечения колебаний всего корпуса;
оборудование колебательного элемента на проксимальном конце (ex vivo) или дистальном конце (in vivo);
использование разных частот в разных местах, например, с частотой, изменяемой посредством изменений плотности материала или дополнительных колебательных элементов.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Вышеописанные известные колебательные элементы для минимально инвазивных медицинских устройств, работающих по принципу отслеживания методом допплеровской визуализации, возбуждают колебания всего сечения устройства. В результате, разные зоны влияют друг на друга, пространственная плотность информации в некоторой степени ограничивается вследствие перекрестных помех. Многие медицинские устройства являются симметричными (иглы, катетеры) и, если отслеживается только острие, то информация об ориентации устройства теряется.
Поэтому существует потребность в усовершенствованном методе визуализации зонда внутри ультразвукового изображения.
Вышеупомянутая цель, по меньшей мере, частично достигается с помощью изобретения, определяемого независимыми пунктами формулы изобретения. Зависимые пункты формулы изобретения определяют предпочтительные варианты осуществления.
В примерах в соответствии с аспектом изобретения предлагается зондовое устройство для введения в тело пациента, содержащее:
- удлиненный корпус;
- множество приводов на электроактивных полимерах (EAP-приводов), смонтированных на, или встроенных внутри поверхности удлиненного корпуса; и
- контроллер, выполненный с возможностью управления EAP-приводами, чтобы, тем самым, побуждать их обеспечивать колебание на частоте не выше 5 кГц.
В варианте выполнения колебание возбуждается локально в радиальном направлении относительно удлиненного корпуса зондового устройства в по меньшей мере двух или более из множества приводов на электроактивных полимерах.
В варианте выполнения колебание возбуждается локально в осевом направлении относительно удлиненного корпуса зондового устройства в по меньшей мере двух или более из множества приводов на электроактивных полимерах; и/или
В варианте выполнения колебание возбуждается локально в тангенциальном направлении относительно удлиненного корпуса зондового устройства в по меньшей мере двух или более из множества приводов на электроактивных полимерах.
В варианте выполнения первый поднабор приводов на электроактивных полимерах находится в одном угловом положении вокруг удлиненного корпуса, и второй поднабор приводов на электроактивных полимерах находится в другом угловом положении вокруг корпуса.
В варианте выполнения управление множеством приводов на электроактивных полимерах осуществляется с возможностью обеспечения колебания с частотой, которая выше резонансной частоты удлиненного корпуса.
В варианте выполнения по меньшей мере поднабор приводов на электроактивных полимерах покрыт по меньшей мере на одной поверхности слоем, демпфирующим колебания.
В варианте выполнения контроллер выполнен с возможностью подачи разных частот колебаний в по меньшей мере два разных привода на электроактивных полимерах.
В варианте выполнения контроллер выполнен с возможностью подачи кодированной последовательности колебаний в по меньшей мере один из приводов на электроактивных полимерах.
В варианте выполнения контроллер выполнен с возможностью управления приводами на электроактивных полимерах таким образом, чтобы вызывать изменение угла отклонения наконечника зонда. При этом, первый поднабор из множества приводов на электроактивных полимерах предназначен для управления углом отклонения, и второй поднабор множества приводов на электроактивных полимерах предназначен для обеспечения колебания. Альтернативно, по меньшей мере один из множества приводов на электроактивных полимерах предназначен как для изменения угла отклонения и для обеспечения колебания.
В варианте выполнения множество приводов на электроактивных полимерах встроено во внешнюю стенку устройства.
Изобретение предлагает систему и способ обеспечения колебаний зонда для применения при отслеживании колебаний с помощью допплеровской визуализации. Вместо фиксации колебательного элемента к зонду, к зондовому устройству закрепляют, или в него встраивают множество электроактивных полимерных элементов. Устройство может быть, так называемым, «внутренним» устройством для введения в тело субъекта. Субъект может быть живым субъектом или трупом. Субъект может быть любым субъектом, который может вмещать зондовое устройство в своем теле (т.е. который можно исследовать или изучать изнутри с помощью такого зондового устройства). Зондовое устройство предпочтительно является устройством для введения в тело человека или животного. Поэтому устройство может быть медицинским устройством, например, иглой, катетером, проводником, проволочным направителем, эндоскопом или подобным устройством. В таком случае, устройство можно соответственно контролировать или визуализировать с использованием ультразвукового устройства.
EAP-приводы могут быть встроены в стенку устройства и могут быть тонкими, гибкими и/или сгибаемыми.
При обеспечении локальных EAP-приводов, они могут возбуждать колебания только секции внешней стенки зондового устройства, а не всего устройства. Следовательно, они могут обеспечивать колебания только локально. При этом, упомянутые приводы могут работать независимо, с меньшими перекрестными помехами, что допускает более высокое пространственное разрешение и, следовательно, повышенную плотность информации.
При использовании приводов на электроактивных полимерах, тонкие, гибкие элементы с длинным ходом, работающие в диапазоне частот от нескольких Гц до МГц, можно встраивать в, или на стенку устройства. При этом, вместо всего устройства, колеблющимися могут быть сделаны сегменты по окружности. В сечение устройства может быть встроено большее число сегментов. Это дает ряд таких преимуществ, как возможность определения трехмерной ориентации зонда (например, вход в плоскость визуализации или выход из данной плоскости), а также определение расстояния от дистального и/или проксимального конца.
С помощью EAP-приводов можно возбуждать более крупные зоны, при сохранении гибкости устройства.
Контроллер выполнен с возможностью, например, подачи частоты колебаний в диапазоне от 5 Гц до 5 кГц. Данный диапазон частот подходит для EAP-приводов и применим для создания возможности обнаружения и визуализации удлиненного корпуса методом ультразвуковой визуализации в допплеровском режиме. Поскольку изобретение имеет целью визуализацию и/или отслеживание удлиненного корпуса методом ультразвуковой визуализации в допплеровском режиме, то частота колебаний должна быть во всех случаях подходящей для обеспечения возможности данной функции.
Максимальная рабочая частота около 5 кГц пригодна, например, при учете максимального разрешения (т.е. наименьшего смещения, которое можно визуализировать) и частоты отклика ультразвука.
Обычно, частоты могут быть в диапазоне от 5 Гц до 1 кГц, например, от 10 Гц до 1 кГц, или, например, от 50 Гц до 1 кГц. Высокие рабочие частоты могут быть также нежелательны с точки зрения обработки сигналов. Следовательно, в вышеприведенных диапазонах, верхним пределом вместо 1 кГц может быть 750 Гц или 500 Гц, или 250 Гц. Высокие частоты могут быть также нежелательны с точки зрения качества изображения.
В некоторых случаях, частота колебания может быть даже ниже, например, в диапазоне от 0,5 Гц до 10 Гц.
В соответствии с некоторыми примерами, приводами можно управлять для осуществления работы в импульсном режиме, при этом приводы производят одиночные или дискретные импульсы, за которыми следует некоторое время ожидания. В данном случае, «частота колебаний» может относиться к эффективной частоте колебаний, означающую частоту пульсации. В данных случаях, частота колебаний может быть ниже, например, даже ниже, чем 0,5 Гц.
Контроллер, например, выполнен с возможностью подачи разной частоты колебаний в, по меньшей мере, два разных EAP-привода. Разные частоты колебаний будут проявляться разными цветами в трехмерном изображении в цветном допплеровском режиме.
Колебания могут возбуждаться локально в радиальном направлении (относительно корпуса зондового устройство) в по меньшей мере некоторых из EAP-приводов. Например, EAP-привод может изгибаться радиально внутрь и наружу.
Колебания могут возбуждаться локально в аксиальном направлении (относительно корпуса зондового устройство) в по меньшей мере некоторых из EAP-приводов. Например, EAP-привод может растягиваться и сжиматься в аксиальном направлении.
Колебания могут возбуждаться локально в тангенциальном направлении (относительно корпуса зондового устройство) в по меньшей мере некоторых из EAP-приводов. Например, EAP-привод может растягиваться и сжиматься по окружности зонда.
Возможно также сочетание колебаний в любых из вышеупомянутых направлений. Возможны также многие другие отличающиеся конфигурации.
Первый поднабор EAP-приводов может находиться в одном угловом положении вокруг удлиненного корпуса, и второй поднабор EAP-приводов может находиться в другом угловом положении вокруг корпуса.
При размещении разных элементов с их собственными характеристическими частотами колебаний по окружности появляется возможность идентифицировать трехмерную ориентацию с использованием 2-мерной плоскости изображения, например, для определения направления наконечника.
Разные элементы можно также разместить на разном расстоянии от наконечника или от других областей интереса, так что определяется расстояние от наконечника или другой области.
Информация о поворотной ориентации также может обеспечиваться, и вновь на основе разных приводов в разных положениях по окружности.
Контроллер может быть выполнен с возможностью управления EAP-приводами, чтобы вызывать, тем самым, изменение угла отклонения наконечника зонда. Первый поднабор EAP-приводов может быть предназначен для управления углом отклонения, и второй поднабор EAP-приводов может быть предназначен для управления колебаниями. По меньшей мере, один EAP-привод может быть предназначен как для управления углом отклонения, так и для управления колебаниями.
При этом, EAP-приводы можно применять совместно для ультразвукового отслеживания (колебаний) в допплеровском режиме, а также для одновременного изменения угла отклонения (изгиба) устройства, что позволяет объединять обе функции в единственном элементе с использованием одной и той же технологии.
Устройство содержит, например, катетер. EAP-приводы могут быть встроены во внешнюю стенку устройства.
Примеры в соответствии с другим аспектом изобретения предлагают систему для наблюдения положения зондового устройства, содержащую:
- зондовое устройство вышеописанного типа;
- ультразвуковой сканер, выполненный с возможностью работы в трехмерном допплеровском режиме, при этом ультразвуковой сканер выполнен с возможностью генерации трехмерных допплеровских данных.
Следовательно, зондовое устройство выполнено с возможностью обеспечения колебаний, которые могут измеряться ультразвуковым сканером, при работе в трехмерном допплеровском режиме.
Система предпочтительно является системой визуализации и, даже предпочтительнее, системой медицинской визуализации для визуализации части тела человека или животного.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Примеры изобретения подробно описаны далее со ссылкой на прилагаемые чертежи, на которых:
Фигура 1 - изображение известного устройства на основе электроактивного полимера, которое не зафиксировано;
Фигура 2 - изображение известного устройства на основе электроактивного полимера, которое закреплено подложкой;
Фигура 3 - первый пример катетера с колебательными EAP-элементами;
Фигура 4 - второй пример катетера с колебательными EAP-элементами;
Фигура 5 - изображение возможных применений EAP-приводов для управления углом отклонения и для возбуждения колебаний; и
Фигура 6 - сечение примерного зонда, содержащего EAP-приводы, встроенные во внешнюю секцию стенки зонда в двух разных местах по окружности.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Изобретение предлагает внутреннее зондовое устройство для введения в тело пациента, содержащее удлиненный корпус с множеством EAP-приводов, смонтированных на поверхности корпуса. EAP-приводы выполнены с возможностью колебания таким образом, что их положение становится видным на ультразвуковом допплеровском изображении.
Выше упоминалось, что известно применение колебаний для визуализации элемента на ультразвуковом допплеровском изображении. Применение EAP-приводов с данной целью позволяет идентифицировать отдельные местоположения. В частности, перемещение EAP-привода, в основном, можно изолировать от основного корпуса зонда. Кроме того, EAP-приводы могут быть тонкими, легкими и достаточно компактными для закрепления на или внутри поверхности зонда, например, катетера, иглы или эндоскопа.
Далее сначала поясняется технология электроактивных полимеров (EAP).
Электроактивные полимеры (EAP) являются новым классом материалов в области электрочувствительных материалов. EAP могут работать как датчики или приводы и могут легко изготавливаться с различными формами, допускающими удобное встраивание во множество различных систем.
Материалы разработаны с такими характеристиками, как напряжение и деформация приведения в действие, которые значительно повышены за последние десять лет. Риски технологии снижены до приемлемых уровней для разработки изделий, так что EAP вызывают все возрастающий коммерческий и технический интерес. Преимущества EAP включают в себя низкое потребление мощности, небольшой форм-фактор, гибкость, бесшумную работу, точность, возможность высокого разрешения, высокое быстродействие и циклическое приведение в действие.
Усовершенствованные рабочие характеристики и особые преимущества EAP-материалов обуславливают применимость в новых областях.
EAP-устройство можно применить в любой области, где желательна небольшая величина перемещения компонента или характерного элемента на основе электропривода. Аналогично, технологию можно применять для измерения небольших перемещений. Однако, данная область применения использует только функцию привода.
Применение EAP делает возможными функции, которые были невозможными прежде, или обеспечивает значительное преимущество по сравнению с обычными решениями на основе датчиков/приводов, благодаря сочетанию относительно больших деформации и усилия в небольшом объеме или тонкой форме исполнения, по сравнению с обычными приводами. EAP характеризуются также бесшумной работой, точным электронным управлением, высоким быстродействием и широким диапазоном возможных частот привода, например, 0-1 МГц, обычно, ниже 20 кГц.
Устройства, использующие электроактивные полимеры, можно разделить на материалы диэлектрические и ионные.
Примеры диэлектрических EAP включают в себя пьезоэлектрические полимеры, электрострикционные полимеры (например, релаксорные полимеры на основе поливинилиденфторида (PVDF)) и диэлектрические эластомеры. Другие примеры включают в себя электрострикционные графт-полимеры, электрострикционную бумагу, электреты, электро-вязкоупругие эластомеры и жидкокристаллические эластомеры.
Примерами ионных EAP являются сопряженные/проводящие полимеры, ионные полимер-металлические композиты (IPMC) и углеродные нанотрубки (CNT). Другие примеры включают в себя ионные полимерные гели.
Диэлектрические EAP приводятся в действие электрическим полем при посредстве прямой электромеханической связи. Они обычно нуждаются в сильных полях (вольт на метр), но слабых токах. Полимерные слои обычно являются тонкими, чтобы поддерживать как можно более низким управляющее напряжение.
Ионные EAP активизируются посредством электрически вызываемого переноса ионов и/или растворителя. Они обычно требуют низких напряжений, но высоких токов. Они нуждаются в жидкой/гелеобразной электролитной среде (хотя некоторые системы материалов могут также работать с использованием твердых электролитов).
Оба класса EAP содержат несколько классов семейства, каждый с собственными преимуществами и недостатками.
Первый значительный подкласс диэлектрических EAP представляет собой пьезоэлектрические и электрострикционные полимеры. Хотя электромеханические характеристики традиционных пьезоэлектрических полимеров ограничены, резкое повышение упомянутых характеристик привело к созданию релаксорных полимеров на основе PVDF, которые проявляют спонтанную электрическую поляризацию (управляемую полем ориентацию). Данные материалы можно предварительно деформировать для повышения характеристик в направлении деформации (предварительная деформация приводит к улучшенному молекулярному выстраиванию). Как правило, применяют металлические электроды, так как деформации обычно бывают в умеренном режиме (1-5%). Можно также применять электроды других типов (например, из проводящих полимеров, саженаполненных масел, гелей или эластомеров и т.п.). Электроды могут быть сплошными или сегментированными.
Другой представляющий интерес подкласс диэлектрических EAP состоит из диэлектрических эластомеров. Тонкая пленка данного материала может быть проложена между эластичными электродами, формирующими конденсатор с пластинчатыми обкладками. В случае диэлектрических эластомеров, магнитное натяжение, вызываемое прилагаемым электрическим полем, приводит к напряжению в пленке и вынуждает ее контактировать по толщине и расширяться по площади. Параметр деформации обычно увеличивают посредством предварительного деформирования эластомера (необходима рамка для удерживания предварительной деформации). Деформации могут быть значительными (10-300%). Это также ограничивает тип электродов, которые можно применить: при небольших и умеренных деформациях могут подойти металлические электроды и электроды из проводящих полимеров, в режиме с большими деформациями обычно применяют саженаполненные масла, гели или эластомеры. Электроды могут быть сплошными или сегментированными.
Первым значительным подклассом ионных EAP являются ионные полимер-металлические композиты (IPMC). IPMC состоят из набухшего в растворителе слоя ионно-обменной полимерной мембраны, проложенного между двумя тонкими металлическими или углекомпозитными электродами, и нуждаются в использовании электролита. Типичными электродными материалами являются Pt, Gd, CNT, CP, Pd. Типичными электролитами являются водоосновные растворы Li+ и Na+. Когда прикладывают поле, катионы обычно двигаются в сторону катода вместе с водой. Это приводит к реорганизации гидрофильных кластеров и расширению полимера. Деформация в зоне катода приводит к напряжению в остальной части полимерной матрицы, вызывающему изгиб к аноду. Обращение приложенного напряжения изменяет изгиб на обратный. Общеизвестными мембранами являются Nafion® и Flemion®.
Другим значительным подклассом ионных полимеров являются сопряженные/проводящие полимеры. Привод на основе сопряженных полимеров обычно состоит из электрода, проложенного между двумя слоями сопряженного полимера. Электролит используют для изменения состояния окисления. Когда к полимеру прилагается потенциал через электролит, в/из полимер(а) добавляются или выводятся электроны с управлением, при этом окислением и восстановлением. Восстановление вызывает сжатие, а окисление вызывает расширение.
В некоторых случаях добавляют тонкопленочные электроды, когда сам полимер имеет недостаточную проводимость (по направлению). Электролит может быть жидким, гелеобразным или твердым материалом (т.е. комплексом из высокомолекулярных полимеров и солей металлов). Наиболее известными сопряженными полимерами являются полипиролл (PPy), полианилин (PANi) и политиофен (PTh).
Привод может быть также сформирован из углеродных нанотрубок (CNT), суспендированных в электролите. Электролит формирует двойной слой с нанотрубками, допускающий инжекцию заряда. Такая двухслойная инжекция заряда считается основным механизмом в приводах на основе CNT. CNT действует как составленный электродами конденсатор с зарядов, инжектируемым в CNT, который затем уравновешивается электрическим двойным слоем, сформированным перемещением электролитов к поверхности CNT. Изменение заряда на атомах углерода приводит к изменению длины связи C-C. В результате можно наблюдать расширение и сжатие одиночной CNT.
Фигуры 1 и 2 представляют два возможных режима работы EAP-устройства.
Устройство содержит слой 14 электроактивного полимера, проложенный между электродами 10, 12 на противоположных сторонах слоя 14 электроактивного полимера.
Фигура 1 изображает устройство, которое не зафиксировано. Напряжение используют, чтобы вынудить слой электроактивного полимера расширяться во всех направлениях, как показано.
Фигура 2 изображает устройство, которое имеет такую конструкцию, что расширение происходит только в одном направлении. Опорой устройства служит несущий слой 16. Напряжение служит, чтобы вынудить слой электроактивного полимера искривляться или сгибаться.
Характер данного перемещения, например, обусловлен взаимодействием между активным слоем, который расширяется, при приведении в действие, и пассивным несущим слоем. Чтобы получить показанное асимметричное искривление вокруг оси, можно применить, например, ориентирование молекул (растяжение пленки), вынуждающее перемещение в одном направлении.
Расширение в одном направление может происходить вследствие асимметрии в полимере EAP или может происходить вследствие асимметрии свойств несущего слоя или вследствие сочетания того и другого.
Фигура 3 представляет зонд 30 с набором EAP-приводов 32, расположенных по его длине. Зонд является минимально инвазивным медицинским устройством, например, катетером, проводником, проволочным направителем, иглой или эндоскопом. EAP-приводы предназначены для возбуждения колебаний при ультразвуковой визуализации в допплеровском режиме. Приводы 32 работают под управлением контроллера 33 снаружи зонда, на проксимальном конце.
Приводы 32 на электроактивных полимерах обеспечиваются снаружи внешнего корпуса зонда, либо они могут встраиваться в конструкцию внешней стенки.
В первом примере, EAP-приводы являются изгибающими приводами, т.е. они деформируются из плоскости. В одном варианте осуществления, каждый привод содержит слой диэлектрического EAP, проложенный между двумя электродами, и пассивную подложку. Подложка является необязательной, и корпус зонда может функционировать как подложка для EAP-привода.
Наоборот, приводы могут деформироваться в плоскости. В таком случае, колебания могут происходить в тангенциальном направлении в плоскости, перпендикулярной длине зонда, или же колебания могут происходить в направлении, параллельном оси по длине зонда. Колебания могут происходить по всем направлениям в плоскости (как на фигуре 1).
Возможно применение любого сочетания радиальных, продольных колебаний и колебаний по окружности.
Если применяются колебания в плоскости, то привод предпочтительно изолирован, например, окружен просветом, чтобы колебания не вводились в значительной степени в основной корпус зонда. В качестве альтернативы, материал вокруг EAP имеет некоторую гибкость в (продольном или тангенциальном) направлении колебаний, чтобы обеспечивать демпфирование колебаний до того, как они вводятся в остальную часть зонда.
Контроллер служит для управления EAP-приводами. Разные частоты колебаний по-разному визуализируются на ультразвуковом допплеровском изображении, например, в разных цветах. Таким образом, разные EAP-приводы могут работать на разных частотах, чтобы делать различимыми разные места зонда в ультразвуковом изображении. В качестве альтернативы или дополнительно, разные EAP-приводы можно кодировать с использованием отличий, размеров, временной задержки, фазового сдвига, геометрического расстояния между разными элементами, или картиной движения, наложенной на последовательность колебаний.
При наличии дискретных приводов, вместо возбуждения колебаний всего зонда, можно визуализировать ориентацию и направление зонда.
Фигура 4 показывает, что EAP-приводы 32 можно установить в разных местах по окружности зонда 30. При наличии независимых элементов по окружности устройства, и при обеспечении минимальных перекрестных помех, возможно высокое пространственное разрешение, обеспечивающее информацию о поворотной ориентации.
Фигура 4(a) изображает два EAP-привода 32 в разных угловых положениях и в плоском состоянии. Фигура 4(b) изображает два EAP-привода 32 в возбужденном выгнутом состоянии. Как показано, в приведенном примере EAP-приводы колеблются в радиальном направлении, т.е. внутрь и наружу.
В качестве примера, в изображении, которое является сечением по длине зонда, относительные положения двух EAP-приводов по окружности дают представление о направлении, в котором направлен зонд (внутрь изображения или из изображения). Например, когда один EAP-привод смещен по часовой стрелке от другого (в предположении, что они не расположены диаметрально противоположно), зонд направлен внутрь изображения, и когда один EAP-привод смещен против часовой стрелки от другого, зонд направлен из изображения. При этом, какая-то трехмерная информация обеспечивается в плоскости 2-мерной визуализации. Разные EAP-приводы вновь совершают колебания с разными частотами, чтобы можно было отличить один от другого.
Индивидуальная идентификация EAP-приводов позволяет также получать информацию о расстоянии до дистального и/или проксимального конца зонда или других характерных элементов. Например, если только один EAP-привод является видимым в конкретном изображении, то его идентификация позволяет определить положение вдоль и/или по окружности зонда.
Угловое расстояние между двумя приводами, показанными на фигуре 4, может также содержать информацию о расстоянии от дистального наконечника до плоскости визуализации. Например, угловой промежуток может уменьшаться к наконечнику.
Информацию о расстоянии можно также выводить из других вышеописанных переменных параметров, например, частоты, размера, временной задержки, картины движения и т.п.
Из допплеровского изображения получают также поворотную ориентацию, когда обеспечено расположение EAP-приводов по окружности.
Возможно также использование кодированных допплеровских последовательностей. Данные последовательности будут иметь форму частоты колебаний, которая модулируется на низкой частоте для кодирования информационного сигнала.
Затем можно применить алгоритмы, чтобы дешифровать данные кодированные допплеровские последовательности. Упомянутое кодирование позволяет определять положение и поворот катетера таким же образом, который описан выше, посредством индивидуальной идентификации EAP-приводов, так что их можно распознавать автоматически. Это позволяет также представлять другую информацию, например, тип зонда, в систему ультразвуковой визуализации. Например, при представлении в ультразвуковую систему такой информации о катетере, как диаметр, тип материала и т.п., появляется возможность обеспечивать автоматизированную оптимизацию изображения.
Параметры допплеровской системы можно оптимизировать для визуализации подвижных частей устройства или даже движения, которое наводится в окружающей ткани (например, крови).
Фигура 5 изображает катетер 30 с конфигурацией EAP-приводов 32, которая позволяет создавать изгиб и, следовательно, обеспечивает управляемое устройство, а также обеспечивает колебания для ультразвукового отслеживания в допплеровском режиме. Управление углом отклонения можно применять к катетеру, проводнику или проволочному направителю.
Колебания могут обеспечиваться на наконечнике с управлением угла отклонения вдоль стержня. В качестве альтернативы, EAP-приводы могут быть управляемыми медленно изменяющимся сигналом для изменения угла отклонения, на который накладывается более высокочастотный сигнал для возбуждения колебаний. Таким образом, отдельные EAP могут выполнять функцию как управления углом отклонения, так и управления колебаниями.
Для EAP-приводов, предназначенных для обеспечения колебаний, которые будут видны на ультразвуковом допплеровском изображении, существуют различные конструктивные параметры, которыми можно воспользоваться.
Ультразвуковая визуализация в допплеровском режиме измеряет скорость и эффективна, например, в диапазоне от -120 см/с до +120 см/с.
В качестве примера, типичный диаметр катетера может быть 1 мм (например, размер номер 3 по французской шкале диаметров катетеров). В примере на фигуре 4, в предположении диаметра 1 мм, максимальное радиальное смещение наружу может иметь величину 0,1 мм (=0,01 см). Таким образом, деформацию можно аппроксимировать синусоидой 0,01sin(2πft). Скорость равна 0,02πfcos(2πft). Установка максимальной скорости равной 120 см/с дает f=1909 Гц. Установка более высокой максимальной скорости и/или меньшего максимального смещения дает более высокую частоту. Максимальное смещение 0,5 мм (=0,05 см) дает частоту около 4 кГц.
Максимальная рабочая частота около 5 кГц пригодна, например, при учете максимального разрешения (т.е. наименьшего смещения, которое можно визуализировать) и частоты отклика ультразвука.
При большем смещении EAP-привода, меньшая частота будет давать типичную максимальную чувствительность системы допплеровской визуализации. Кроме того, от максимальной скорости не требуется достижения максимальной определяемой скорости, и можно использовать максимальную скорость наконечника в диапазоне от 1 см/с до 100 см/с или даже от 1 см/с до 50 см/с.
Рабочая частота обычно будет в диапазоне от 5 Гц до 5 кГц, предпочтительнее от 5 Гц до 1 кГц, например, от 10 Гц до 1 кГц или, например, от 50 Гц до 1 кГц. Высокие рабочие частоты могут быть также нежелательны с точки зрения обработки сигналов. Следовательно, в вышеприведенных диапазонах верхним пределом вместо 1 кГц может быть 750 Гц или 500 Гц, или 250 Гц.
EAP-приводы для генерации колебаний не обязательно должны иметь большой размах срабатывания и, поэтому обычно меньше приводов, которые будут применяться для изменения угла отклонения. Один пример 0,01-см (0,1-мм) размаха смещения уже приведен выше. Большую величину перемещения наконечника можно легче обнаруживать, поэтому подходящий диапазон размаха смещения EAP-привода составляет от 0,05 мм до 5 мм, например, от 0,1 мм до 2 мм.
EAP-приводы для возбуждения колебаний не обязательно должны быть длинными, как в случае изгибающих приводов. Они могут иметь единичный коэффициент формы, из чего следует, что они имеют одинаковые длину и ширину (в плоскости слоев). Следовательно, они могут быть круглыми, квадратными или форму любого правильного многоугольника или даже любую другую подходящую форму. Они могут иметь коэффициент формы до 5:1 и по-прежнему предназначаться специально для возбуждения колебаний с целью допплеровских измерений.
Как изложено выше, могут быть также отклоняющие по углу приводы. Данные приводы обычно длиннее (т.е. с большим коэффициентом формы, например, больше, чем 5:1), но их также можно возбуждать для колебания с вышеупомянутыми частотами, например, налагаемыми на более медленно изменяющийся во времени сигнал управления углом отклонения.
Таким образом, в EAP-привод может подаваться изменяющийся во времени сигнал управления, чтобы вызывать и регулировать изгиб с частотой ниже, чем налагаемая частота колебаний. Частота сигнала для управления изгибом может быть в диапазоне от 0,5 Гц до 10 Гц.
Вся система может содержать по меньшей мере один EAP-привод, предназначенный специально для допплеровской визуализации колебаний, с вышеописанными диапазонами частот, коэффициентом формы и диапазонами смещений. В таком случае, система может содержать дополнительные EAP-приводы для управления углом отклонения, но которые дополнительно приводятся в колебательное движение. При этом могут даже быть отдельные отклоняющие по углу приводы, в которых не возбуждаются колебания.
Размер EAP-приводов для допплеровской визуализации колебаний также может быть очень малым. Например, если катетер, показанный на фигуре 4, имеет диаметр 1 мм и поэтому длину окружности 3,14 мм, то каждый привод должен занимать менее 25% от длины окружности, например, меньше, чем 0,7 мм. Калибр по шкале Шарьера для размеров катетеров достигает диаметра 3,33 мм (калибр 10). Например, EAP-привод имеет наименьший размер в диапазоне от 0,2 мм до 5 мм, например, от 0,2 до 2 мм. Для конструкции с единичным коэффициентом формы, оба размера (длина и ширина), разумеется, будут находиться в данном диапазоне. Для отклоняющего по углу и колебательного привода, коэффициент формы может быть более удлиненным, например, 5 мм × 50 мм.
Как упоминалось выше, при применении локально встроенных или закрепленных EAP-приводов, приводы могут возбуждать колебания только локальных секций внешней стенки зондового устройства, а не всего устройства. Это позволяет отличать отдельные секции стенки зонда друг от друга на ультразвуковом допплеровском изображении и, в результате, получать более высокие пространственное разрешение и плотность информации в изображениях зонда. В частности, получают больше угловой информации, которая позволяет легче определять трехмерную ориентацию зонда.
Чтобы обеспечивать высокое разрешение в информации об ориентации, в вариантах осуществления желательно обеспечивать, чтобы колебания, генерируемые каждым EAP-приводом, оставались, насколько возможно, локальными и, в значительной степени изолированными от остальной части корпуса зонда. В случае, когда разные приводы встроены или закреплены, например, на разных окружных секциях стенки зонда, желательно ограничивать колебания каждого привода его собственной остающейся локальной секцией стенки и изолировать от остальных секций стенки. Данное ограничение или изоляция колебаний гарантирует, что перекрестные помехи между колебаниями приводов минимизируются или в значительной степени устраняются, что позволяет максимизировать пространственное разрешение получаемых допплеровских изображений.
EAP пригодны по своей природе для обеспечения такой работы с независимыми колебаниями. Это по меньшей мере частично обусловлено их легким весом, малой толщиной и гибкостью, что позволяет очень точно подводить возбуждаемые колебания к узко локализованным секциям или зонам данного несущего корпуса (т.е. зонда в настоящем случае).
Кроме того, в соответствии с по меньшей мере поднабором вариантов осуществления, можно выполнить дополнительные конструктивные доработки для поддержки ограничения колебаний каждого EAP-привода. Возможны несколько разных подходов.
В соответствии с по меньшей мере первым поднабором примерных вариантов осуществления, EAP-приводы для возбуждения колебаний можно располагать ближе к менее жесткому дистальному концу зонда, чем к намного более жесткому проксимальному концу. В частности, в случае зондов, располагающими возможностью изменения угла отклонения, например, показанных на фигуре 5, отклоняющийся по углу дистальный конец, обычно, будет состоять из более гибкой, упругой композиции материалов, чем не отклоняющийся по углу проксимальный конец зонда. Два конца могут состоять из одинакового материала с разными плотностями (с менее плотным дистальным концом) или могут состоять из разных материалов или разных композиций материалов.
При монтаже или закладке EAP-приводов внутри стенки зонда, вблизи (или, фактически, внутри) сгибаемой, гибкой дистальной секции стержня зонда, колебания каждого привода, в основном, демпфируются близлежащим (или окружающим) более гибким материалом. В частности, колебания, распространяющиеся по меньшей мере к дистальному концу, демпфируются более гибким материалом, что, следовательно, по меньшей мере сокращает суммарную энергию колебаний, беспрепятственно распространяющихся в другие зоны зонда (например, секции стенок, приводимых в колебательное движение другими приводами). Поэтому, данное поведение ослабляет перекрестные помехи между разными колеблющимися секциями и помогает повысить пространственное разрешение получаемых ультразвуковых допплеровских изображений.
В соответствии с по меньшей мере вторым поднабором вариантов осуществления, EAP-приводы можно покрывать или заделывать слоем деформируемого материала низкой жесткости, что, по существу, поглощать или демпфировать распространение колебаний в корпус зонда. Пример данной конфигурации изображен для иллюстрации на фигуре 6, на которой представлено сечение примерного зонда 30, содержащего EAP-приводы 32, встроенные во внешнюю секцию стенки зонда в двух разных местах по окружности. Каждый из EAP-приводов 32 покрыт по верхней основной поверхности слоем 38 гибкого материала низкой жесткости.
Фигура 6(a) представляет приводы в неактивном плоском состоянии. Фигура 6(b) представляет приводы в действующем деформированном состоянии. Поглощающий гибкий слой 38 сопрягается с EAP-приводом 32 таким образом, что он следует за перемещением и деформацией привода, и оба изгибаются и перемещаются вместе.
Гибкий слой 38 выполняет поглощение или демпфирование колебаний, порождаемых EAP-приводом 32, чтобы ослаблять или предотвращать передачу колебаний в окружающий корпус зонда или окружающие секции стенки зонда. Следовательно, тем самым предотвращаются перекрестные помехи между разными EAP-приводами и разными секциями стенки, что повышает пространственное разрешение и плотность информации и совершенствует обнаружение ориентации.
Хотя в примере на фигуре 6 на приводы нанесено покрытие только по одной поверхности, в альтернативных примерах приводы могут иметь покрытие на более, чем одной поверхности или могут быть заделаны в материал малой жесткости.
В соответствии с по меньшей мере третьим поднабором вариантов осуществления, EAP-приводы могут возбуждаться на конкретных частотах, выбранных для предотвращения значительных колебаний окружающего корпуса зонда или катетера. В частности, приводы можно вынуждать колебаться на частоте, которая выше, чем резонансная частота основного зонда, корпуса катетера или сегмента корпуса катетера. Следовательно, это исключает ситуацию возбуждения резонанса в зонде, и, следовательно, возникновения высокоамплитудных колебаний по всему корпусу зонда.
Резонансная частота зонда или привода будет зависеть от конкретных размеров и конструкции устройства, в частности, от упругости или жесткости материала и длины корпуса. В случае, если EAP-приводы должны быть встроены в гибкую дистальную (оконечную) часть корпуса зонда или катетера, данная часть обычно может иметь резонансную частоту приблизительно 10 Гц (хотя данная частота будет широко изменяться для разных вариантов материалов и размеров). Частоту колебаний EAP-привода в некоторых примерах можно выбрать равной по меньшей мере двукратной резонансной частоте участка зонда или катетера в который встроен, или на котором закреплен привод.
Каждый из трех приведенных способов ослабления колебательных перекрестных помех можно сочетать с другими подходящим образом, чтобы дополнительно ограничить местоположение и улучшить изоляцию каждого EAP-привода.
Материалы, подходящие для слоя EAP, известны. Электроактивные полимеры включают в себя, но без ограничения, следующие подклассы: пьезоэлектрические полимеры, электромеханические полимеры, релаксорные ферроэлектрические полимеры, электрострикционные полимеры, диэлектрические эластомеры, жидкокристаллические эластомеры, сопряженные полимеры, ионные полимер-металлические композиты, ионные гели и полимерные гели.
Подкласс электрострикционных полимеров включает в себя, но без ограничения:
Поливинилиденфторид (PVDF), поливинилиденфторид - трифторэтилен (PVDF-TrFE), поливинилиденфторид - трифторэтилен - хлорфторэтилен (PVDF-TrFE-CFE), поливинилиденфторид - трифторэтилен - хлортрифторэтилен (PVDF-TrFE-CTFE), поливинилиденфторид - гексафторпропилен (PVDF-HFP), полиуретаны или их смеси.
Подкласс диэлектрических эластомеров включает в себя, но без ограничения:
акрилаты, полиуретаны, силиконы.
Подкласс сопряженных полимеров включает в себя, но без ограничения:
полипиррол, поли-3,4-этилендиокситиофен, поли(p-фенилена сульфид), полианилины.
Ионные устройства могут быть на основе ионного полимер-металлического композита (IPMC) или сопряженных полимеров. Ионный полимер-металлический композит (IPMC) является синтетическим композиционным наноматериалом, который проявляет свойства искусственной мышцы под действием прилагаемого напряжения или электрического поля.
Более подробно, IPMC состоят из ионного полимера, известного под маркой Nafion или Flemion, поверхности которого химически плакированы или физически покрыты слоем проводников, например, платины или золота, или углекомпозитными электродами. При приложении напряжения, миграция или перераспределение ионов, обусловленные напряжением, приложенным к полоске IPMC, приводят к деформации изгиба. Полимер является набухшей в растворителе ионно-обменной полимерной мембраной. Поле вынуждает катионы перемещаться в сторону катода вместе с водой. Это приводит к реорганизации гидрофильных кластеров и расширению полимера. Деформация в зоне катода приводит к напряжению в остальной части полимерной матрицы, вызывающему изгиб к аноду. Обращение приложенного напряжения изменяет изгиб на обратный.
Если гальванически нанесенные электроды расположены в виде несимметричной конфигурации, то прилагаемое напряжение может вызывать деформации всех видов, например, деформацию скручивания, свертывания, осевого вращения, поворота и несимметричного изгиба.
Во всех приведенных примерах можно предусмотреть дополнительные пассивные слои для воздействия на электрические и/или механические свойства слоя EAP, проявляемые в ответ на прилагаемое электрическое поле.
Слой EAP каждого модуля может быть проложен между электродами. Электроды могут быть растягиваемыми настолько, чтобы они повторяли деформацию слоя EAP-материала. Материалы, подходящие для электродов, также известны и могут быть, например, выбраны из группы, состоящей из тонких пленок таких металлов, как золото, медь или алюминий, или таких органических проводников, как углеродная сажа, углеродные нанотрубки, графен, полианилин (PANI), поли(3,4-этилендиокситиофен) (PEDOT), например, поли(3,4-этилендиокситиофен)-поли(стиролсульфонат) (PEDOT:PSS). Применимы также металлизированные полиэфирные пленки, например, металлизированный полиэтилентерефталат (PET), например, с использованием алюминиевого покрытия.
Изобретение представляет интерес, в общем, для инвазивных медицинских устройств, например, катетеров, проводников, проволочных направителей, игл и эндоскопов. Изобретение предназначено для применения в системах терапии под контролем ультразвуковых изображений в сочетании с отслеживанием методом ультразвуковой допплеровской визуализации.
После изучения чертежей, описания и прилагаемой формулы изобретения, специалистами в данной области техники в процессе практической реализации заявленного изобретения могут быть разработаны и выполнены другие модификации раскрытых вариантов осуществления. В формуле изобретения, формулировка «содержащий» не исключает других элементов или этапов, и упоминание слова в единственном числе не исключает его возможной множественности. Очевидное обстоятельство, что некоторые признаки упомянуты во взаимно различающихся зависимых пунктах формулы изобретения, не означает невозможность применения комбинации упомянутых признаков в подходящем случае. Никакие позиции в формуле изобретения нельзя считать ограничивающими объем изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УЛЬТРАЗВУКОВОЕ УСТРОЙСТВО И АКУСТИЧЕСКИЙ КОМПОНЕНТ ДЛЯ ИСПОЛЬЗОВАНИЯ В ТАКОМ УСТРОЙСТВЕ | 2017 |
|
RU2756022C2 |
| УЛЬТРАЗВУКОВОЕ ПРЕОБРАЗУЮЩЕЕ УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ИМ | 2018 |
|
RU2769757C2 |
| УПРАВЛЕНИЕ ЖЕСТКОСТЬЮ ДЛЯ ЭЛЕКТРОАКТИВНЫХ ИСПОЛНИТЕЛЬНЫХ УСТРОЙСТВ | 2017 |
|
RU2748051C2 |
| ЧИСТЯЩЕЕ УСТРОЙСТВО ДЛЯ ПОЛОСТИ РТА С РЕГУЛИРУЕМОЙ ФОРМОЙ И СПОСОБ ЧИСТКИ ПОЛОСТИ РТА | 2016 |
|
RU2717583C2 |
| ФОРМИРОВАНИЕ КОНТАКТА УЛЬТРАЗВУКОВОГО УСТРОЙСТВА | 2017 |
|
RU2742967C2 |
| ИСПОЛНИТЕЛЬНОЕ ИЛИ СЕНСОРНОЕ УСТРОЙСТВО НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА | 2016 |
|
RU2705647C2 |
| УСТРОЙСТВО С ИСПОЛНИТЕЛЬНЫМ МЕХАНИЗМОМ НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА | 2016 |
|
RU2720478C2 |
| ПЕРЕКЛЮЧАТЕЛЬ НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ИЛИ ФОТОАКТИВНОГО ПОЛИМЕРА | 2016 |
|
RU2716841C2 |
| ПРЕОБРАЗОВАТЕЛЬ ДЛЯ ПРЕОБРАЗОВАНИЯ ЭЛЕКТРИЧЕСКОГО И/ИЛИ РАДИАЦИОННОГО СИГНАЛА В ПЕРЕМЕЩЕНИЕ ИЛИ НАОБОРОТ | 2016 |
|
RU2727067C2 |
| ПРИВОД НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО МАТЕРИАЛА И СПОСОБ ВОЗБУЖДЕНИЯ | 2018 |
|
RU2766272C2 |


Группа изобретений относится к области медицины, в частности к системам для наблюдения с помощью ультразвука положения внутренних зондов, применяемых во время хирургической операции или исследования. Зондовое устройство для введения в тело субъекта содержит: удлиненный корпус (30); множество приводов на электроактивных полимерах (32), смонтированных на или встроенных внутри поверхности корпуса; и контроллер (33), выполненный с возможностью управления множеством приводов на электроактивных полимерах, чтобы тем самым побуждать их обеспечивать колебание на частоте не выше 5 кГц. Группа изобретений относится также к катетеру, содержащему указанное устройство, и к системе для наблюдения положения зондового устройства. Группа изобретений позволяет более точно идентифицировать местоположение и ориентацию устройства внутри тела пациента методом ультразвуковой допплеровской визуализации. 3 н. и 12 з.п. ф-лы, 6 ил.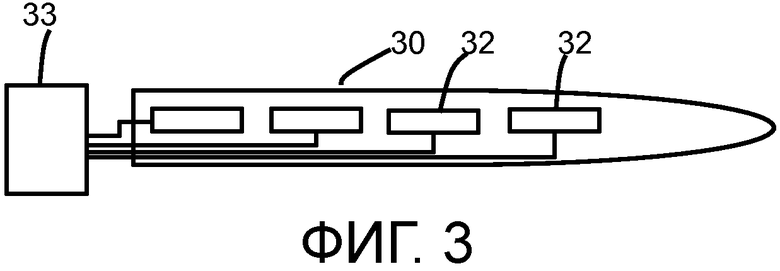
1. Зондовое устройство для введения в тело субъекта, содержащее:
- удлиненный корпус (30);
- множество приводов на электроактивных полимерах (32), смонтированных на или встроенных внутри поверхности корпуса; и
- контроллер (33), выполненный с возможностью управления множеством приводов на электроактивных полимерах, чтобы тем самым побуждать их обеспечивать колебание на частоте не выше 5 кГц.
2. Устройство по п. 1, в котором колебание возбуждается локально в радиальном направлении относительно удлиненного корпуса зондового устройства в по меньшей мере двух или более из множества приводов на электроактивных полимерах.
3. Устройство по п. 1 или 2, в котором
колебание возбуждается локально в осевом направлении относительно удлиненного корпуса зондового устройства в по меньшей мере двух или более из множества приводов на электроактивных полимерах; и/или
колебание возбуждается локально в тангенциальном направлении относительно удлиненного корпуса зондового устройства в по меньшей мере двух или более из множества приводов на электроактивных полимерах.
4. Устройство по любому предыдущему пункту, в котором первый поднабор приводов на электроактивных полимерах находится в одном угловом положении вокруг удлиненного корпуса, и второй поднабор приводов на электроактивных полимерах находится в другом угловом положении вокруг корпуса.
5. Устройство по любому предыдущему пункту, в котором управление множеством приводов на электроактивных полимерах осуществляется с возможностью обеспечения колебания с частотой, которая выше резонансной частоты удлиненного корпуса.
6. Устройство по любому предыдущему пункту, в котором по меньшей мере поднабор приводов на электроактивных полимерах покрыт по меньшей мере на одной поверхности слоем, демпфирующим колебания.
7. Устройство по любому предыдущему пункту, в котором контроллер (33) выполнен с возможностью подачи разных частот колебаний в по меньшей мере два разных привода на электроактивных полимерах.
8. Устройство по любому предыдущему пункту, в котором контроллер (33) выполнен с возможностью подачи кодированной последовательности колебаний в по меньшей мере один из приводов на электроактивных полимерах.
9. Устройство по любому предыдущему пункту, в котором контроллер (33) выполнен с возможностью управления приводами на электроактивных полимерах таким образом, чтобы вызывать изменение угла отклонения наконечника зонда.
10. Устройство по п. 9, в котором первый поднабор из множества приводов на электроактивных полимерах предназначен для управления углом отклонения, и второй поднабор множества приводов на электроактивных полимерах предназначен для обеспечения колебания.
11. Устройство по п. 9, в котором по меньшей мере один из множества приводов на электроактивных полимерах предназначен как для изменения угла отклонения и для обеспечения колебания.
12. Устройство по любому предыдущему пункту, в котором множество приводов на электроактивных полимерах (32) встроено во внешнюю стенку устройства.
13. Катетер, содержащий устройство по любому предыдущему пункту.
14. Система для наблюдения положения зондового устройства, содержащая:
- зондовое устройство для введения в тело субъекта по любому из пп. 1-12; и
- ультразвуковой сканер, выполненный с возможностью работы в трехмерном допплеровском режиме, при этом ультразвуковой сканер выполнен с возможностью генерации трехмерных допплеровских данных.
15. Система по п. 14, в которой система является системой медицинской визуализации для визуализации части тела человека или животного.
| US 20080108901 A1, 08.05.2008 | |||
| US 6781284 B1, 24.08.2004 | |||
| US 20080275380 A1, 06.11.2008 | |||
| US 20140180089 A1, 26.06.2014 | |||
| ВИЗУАЛИЗАЦИЯ ЗОНДА, ОСНОВАННАЯ НА МЕХАНИЧЕСКИХ СВОЙСТВАХ | 2009 |
|
RU2521689C2 |

