Изобретение относится к области пассивной радиолокации и может быть использовано в системе радиотехнического контроля для определения местоположения наземного стационарного источника импульсных радиосигналов с фиксированным периодом повторения импульсов.
Достигаемым техническим результатом изобретения является снижение количества приемных пунктов (до одного), необходимых для реализации разностно-дальномерного метода определения местоположения наземного источника импульсного радиосигнала, отсутствие необходимости организации между приемными пунктами высокоточной временной синхронизации и высокоскоростных каналов связи, необходимых для ретрансляции сигнала.
Способ поясняется иллюстрациями, на которых представлены:
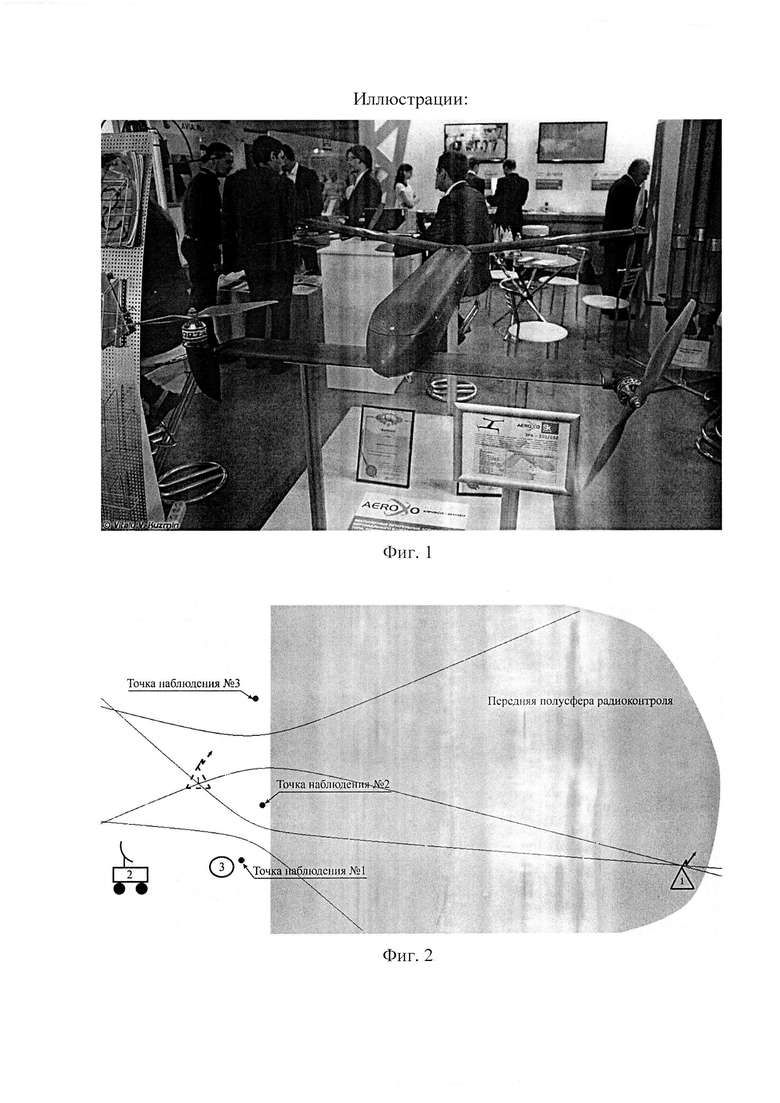
фиг. 1 - беспилотный летательный аппарат типа «конвертоплан»;
фиг. 2 - визуальное пояснение работы предложенного способа определения координат наземного источника импульсного радиосигнала;
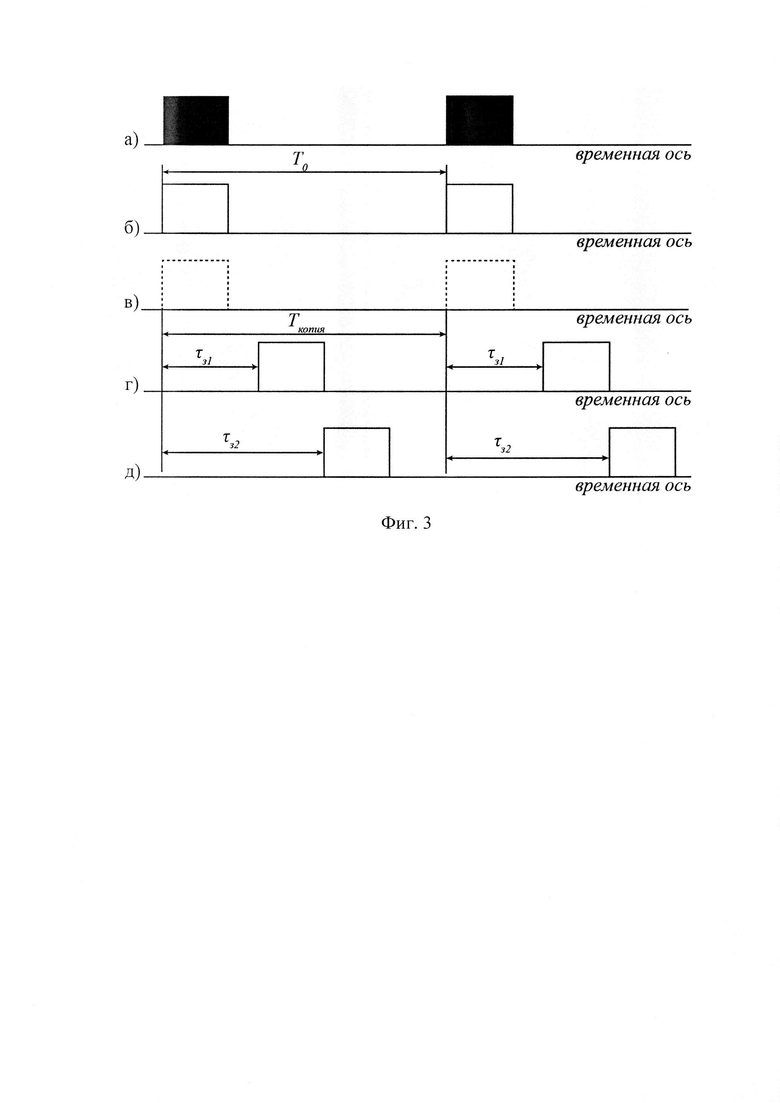
фиг. 3 - диаграммы импульсных радиосигналов на временной шкале
а) принимаемый импульсный радиосигнал в точке наблюдения №1,
б) последовательность видеоимпульсов получаемая в результате обработки принимаемого импульсного радиосигнала в точке наблюдения №1,
в) сформированная «виртуальная» копия в точке наблюдения №1,
г) последовательность видеоимпульсов получаемых в результате обработки принимаемого импульсного радиосигнала в точке наблюдения №2,
д) последовательность видеоимпульсов, получаемых в результате обработки принимаемого импульсного радиосигнала в точке наблюдения №3.
Известен способ определения координат источника радиоизлучения (см. Пат. РФ 2283505, МПК G01S 13/46 (2006.01), опубл. 10.09.2006 г.), сущность которого заключается в определении координат источника радиоизлучения (ИРИ) на основе измерений пеленгов на ИРИ перемещающимся по свободной траектории пеленгатором и вычислении координат ИРИ поиска пересечений пеленгов с различных точек. Этот способ является разновидностью определения местоположения ИРИ методом триангуляции с помощью одного, перемещающегося в пространстве пеленгатора. Основным недостатком способа является необходимость использования в качестве измерителя мобильного пеленгатора, который характеризуется высокой стоимостью, технической сложностью, значительным весом и габаритами, а также наличием громоздкой и дорогостоящей антенной системы.
Известен способ местоопределения ИРИ, близкий по технической сущности к заявляемому изобретению (см., например, Кондратьев B.C., Котов А.Ф., Марков Л.Н. Многопозиционные радиотехнические системы - М.: "Радио и связь", 1986. - 264 с.), основанный на измерении корреляционным методом временных задержек приема сигнала ИРИ, относительно одного из N≥2 пространственно разнесенных назенмых пунктов радиоконтроля. Основным недостатком является низкая мобильность и необходимость организации высокоскоростных каналов связи с высокой пропускной способностью для ретрансляции принимаемого сигнала на опорный пункт приема, что значительно усложняет структуру используемой аппаратуры.
Известен способ-прототип определения местоположения источника радиоизлучения (см. Пат. РФ 2643360, МПК G01S 5/12 (2006.01), опубл. 01.02.2018 г.), сущность которого заключается в предварительной доставке в предполагаемый район нахождения ИРИ БЛА-датчиков (не менее четырех). Каждый из БЛА-датчиков состоит из блока навигационно-временного обеспечения, ненаправленной антенны, панорамного приемника и приемопередатчика. В качестве средства доставки и обслуживания БЛА-датчиков, а также для ретрансляции координатной информации, поступающей с них и передачи команд управления с наземного пункта управления и обработки (НПУО), используется беспилотный или пилотируемый летательный аппарат (ЛА) среднего класса (ЛА-ретранслятор). После доставки в предполагаемый район нахождения источников радиоизлучения, по командам с наземного пункта управления и обработки, БЛА-датчики распределяют в пространстве. Совокупность БЛА-датчиков и ЛА-ретранслятор формально образуют в пространстве многопозиционную систему радиоконтроля. По сигналам блока навигационно-временного обеспечения определяются координаты в пространстве каждого БЛА-датчика и осуществляется их высокоточная привязка к собственной системе координат разностно-дальномерной системы и к единому времени, для этого информация о координатах периферийных БЛА-датчиков в сформированной РДС передается на центральный БЛА-датчик. Каждый БЛА-датчик, имеющий панорамный приемник, осуществляет поиск сигналов ИРИ в заданном частотном диапазоне. При обнаружении сигнала ИРИ осуществляется его оцифровка и передача с помощью передающего устройства приемопередатчика на центральный БЛА-датчик. На центральном БЛА-датчике по поступившим данным осуществляется определение местоположения ИРИ. Данный способ позволяет повысить точность местоопределения ИРИ, функционирующих в труднодоступной местности за счет возможности доставки туда БЛА-датчиков и использования их свойств маневренности и сохранения неподвижного состояния в пространстве. Недостатками указанного способа являются необходимость наличия не менее четырех БЛА-датчиков между которыми необходима организация высокоскоростных каналов связи с высокой пропускной способностью для ретрансляции принимаемого сигнала на опорный пункт приема, что значительно усложняет структуру и стоимость используемой аппаратуры. Кроме того, наличие постоянно действующих каналов связи между приемными пунктами радиоконтроля снижает скрытность системы местоопределения, а в условиях военных конфликтов - живучесть системы.
В связи с этим поиск новых способов определения местоположения источников радиоизлучения с использованием одного приемного пункта является актуальной задачей.
Для достижения технического результата изобретения предлагается в указанном способе-прототипе при определении координат наземного стационарного источника импульсного радиосигнала с фиксированным периодом повторения импульсов использовать не четыре БЛА-датчика, а один, с устройством формирования «виртуального» опорного импульсного сигнала, что позволит исключить необходимость организации высокоточной системы единого времени и высокоскоростных каналов связи, необходимых для ретрансляции сигнала. Это является основным преимуществом предложенного способа и позволит значительно упростить структуру разностно-дальномерной системы местоопределения путем минимизации необходимого количества приемных пунктов (до одного приемного пункта), а, следовательно, повысить скрытность и живучесть системы местоопределения.
Предложенный способ поясняется иллюстрацией, представленной на фиг. 2. На фиг. 2 приняты следующие обозначения: 1 - наземный стационарный источник импульсного радиосигнала, координаты которого определяются; 2 - наземный пункт управления и обработки; 3 - БЛА-датчик.
Один беспилотный летательный аппарат типа «конвертоплан» (фиг. 1, электронный ресурс - https://russiandrone.ru/catalog/bespilotnye-kompleksy/konvertoplan (дата обращения: 15.11.18 г.), выбор носителя типа «конвертоплан» обоснован возможностью принимать неподвижное состояние в пространстве в режиме квадрокоптера и возможностью перемещения с высокой скоростью в конверсионном режиме) (далее БЛА-датчик) оснащенный блоком навигационно-временного обеспечения (НВО), ненаправленной антенной, радиоприемным устройством, устройством формирования «виртуального» опорного импульсного сигнала и приемопередатчиком предварительно размещается в предполагаемом географическом районе нахождения наземного стационарного источника импульсных радиосигналов. БЛА-датчик в конверсионном режиме осуществляет барражирование в заданном районе и с помощью радиоприемного устройства осуществляет поиск импульсного радиосигнала в заданном диапазоне частот. При обнаружении импульсного радиосигнала БЛА-датчик переходит в режим квадрокоптера и принимает неподвижное состояние в пространстве, с помощью блока НВО определяются его координаты в первой точке наблюдения (точка наблюдения №1 на фиг. 2). С помощью радиоприемного устройства БЛА-датчик оценивает параметры обнаруженного импульсного радиосигнала, а именно несущую частоту, длительность импульса (t0) и период их повторения (Т0) и передает измеренные параметры на НПУО. Возможность БЛА-датчика принимать неподвижное состояние в пространстве позволяет оценивать параметры обнаруженного импульсного радиосигнала без влияния эффекта Доплера, а также производить его высокоточную привязку в точке наблюдения к географическим координатам.
С помощью устройства формирования «виртуального» опорного импульсного сигнала осуществляется генерирование «виртуальной» копии с периодом следования импульсов идентичным периоду обнаруженного радиосигнала (Т0 ≈ Ткопии).
Устройство формирования «виртуального» опорного импульсного сигнала состоит из синхронизатора и модулятора и работает следующим образом.
Обнаруженный импульсный радиосигнал (фиг. 3а), с помощью радиоприемного устройства, преобразуется в последовательность видеоимпульсов (фиг. 3б) [Импульсные схемы РЛС. Григорьянц В.Г., М.: Воениздат. 1972. 544 с.], которые подаются на вход синхронизатора. В синхронизаторе, с помощью системы импульсно-фазовой автоподстройки частоты [Системы фазовой автоподстройки частоты. Шахгильдян В.В., Ляховкин А.А., М.: «Связь». 1972. 448 с.], производится настройка подстраиваемого генератора и формируется последовательность синхроимпульсов с периодом идентичным периоду принимаемого радиосигнала. С выхода синхронизатора последовательность синхроимпульсов подается на вход модулятора, в котором каждый импульс последовательности преобразуется в видеоимпульс идентичный видеоимпульсам принимаемого радиосигнала (фиг. 3в). Таким образом на выходе модулятора получают опорную «виртуальную» копию принимаемого импульсного сигнала.
На основе измеренных БЛА-датчиком параметров обнаруженного импульсного радиосигнала на НПУО формируют координаты последующих точек наблюдения и маршруты следования к ним (общее количество точек наблюдения не менее трех).
Точки наблюдения выбираются следующим образом.
Минимальное расстояние между точками наблюдения выбирается исходя из инструментальной точности аппаратуры, размещаемой на борту БЛА-датчика, с целью обеспечить чувствительность в разности времени прихода импульсов принимаемого радиосигнала относительно импульсов «виртуальной» опорной копии. Точность измерения разности времени прихода импульсных сигналов определяется длительностью нарастания переднего фронта импульса, отношением сигнал шум и количеством принятых импульсов [Основы построения и функционирования разностно-дальномерных систем координатометрии источников радиоизлучений. Волков Р.В., Дворников С.В., Саяпин В.Н., Симонов А.Н., СПб.: Военная академия связи. 2013. 116 с.].
Для импульсных сигналов радиолокационных систем, у которых длительность импульсов t<0,2 мкс, частота следования FИМП=100…1000 Гц, за время Т=30 мс точность измерения задержек στ достигает 10…60 нс, что соответствует точности измерении разности хода 3…18 м.
Максимальное расстояние между формируемыми точками наблюдения выбирается таким образом, чтобы не допустить неоднозначность измерений существующей при разносе точек наблюдения на расстояние превышающее период следования импульсов.
Сформировав маршрут и координаты точек наблюдения НПУО передает БЛА-датчику команду на переход в конверсионный режим и перемещению к точке наблюдения №2, в команде содержится информация о координатах точки и маршруте перестроения.
В точке наблюдения №2 БЛА-датчик переходит в режим квадрокоптера и осуществляет обработку принимаемого импульсного радиосигнала, а именно производит преобразование импульсов принимаемого радиосигнала в последовательность видеоимпульсов и измеряет разности времени прихода относительно опорной «виртуальной» копии (фиг. 3г). Оценив значение разности времени прихода (τз1), с помощью приемопередатчика передает его на НПУО, переходит в конверсионный режим и следует в точку наблюдения №3.
В точке наблюдения №3 по аналогии измеряет значение разности времени прихода (τз2) (фиг. 3д) и с помощью приемопередатчика передает его на НПУО.
На НПУО аналитическим способом производится расчет искомых координат источника импульсного радиосигнала (фиг.2). Для решения задачи пользуются формулами аналитической геометрии, описывающими гиперболу на плоскости [Основы построения и функционирования разностно-дальномерных систем координатометрии источников радиоизлучений. Волков Р.В., Дворников С.В., Саяпин В.Н., Симонов А.Н., СПб.: Военная академия связи. 2013. 116 с.].
При решении задачи исходными данными являются:
координаты пространственно-разнесенных трех точек наблюдений (x1;y1), (х2;y2) и (х3;y3);
разность времени прихода сигнала (τз1; τз2).
Разности расстояний от местоположения наземного стационарного источника импульсного радиосигнала с координатами (х0; y0) до точек наблюдения можно представить через задержки распространения электромагнитной волны:


где R12, R13 - разность расстояний между местоположением наземного стационарного источника импульсного радиосигнала до точек наблюдения; с - скорость распространения электромагнитной волны.
Выполняя известные преобразования [Основы построения и функционирования разностно-дальномерных систем координатометрии источников радиоизлучений. Волков Р.В., Дворников С.В., Саяпин В.Н., Симонов А.Н., СПб.: Военная академия связи. 2013. 116 с.] получают значения координат возможного местоположения искомого источника импульсного радиосигнала. Ложные значения исключают, исходя из предположения о нахождении источника в задней или передней полусфере поиска (фиг. 2).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения координат источника радиоизлучения в трехмерном пространстве динамической системой радиоконтроля | 2019 |
|
RU2715422C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ВОЗДУШНОГО ОБЪЕКТА ДИНАМИЧЕСКОЙ СИСТЕМОЙ РАДИОТЕХНИЧЕСКОГО КОНТРОЛЯ | 2017 |
|
RU2660160C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2526094C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ В ТРЕХМЕРНОМ ПРОСТРАНСТВЕ | 2017 |
|
RU2643360C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2022 |
|
RU2798923C1 |
| ДАЛЬНОМЕРНЫЙ СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2011 |
|
RU2506605C2 |
| СПОСОБ ПЕРЕДАЧИ РАДИОСИГНАЛОВ ИСТОЧНИКОМ РАДИОИЗЛУЧЕНИЯ | 2010 |
|
RU2439800C1 |
| СПОСОБ ПЕРЕДАЧИ РАДИОСИГНАЛОВ ИСТОЧНИКОМ РАДИОИЗЛУЧЕНИЯ | 2010 |
|
RU2432676C1 |
| СПОСОБ ПЕРЕДАЧИ РАДИОСИГНАЛОВ ИСТОЧНИКОМ РАДИОИЗЛУЧЕНИЯ | 2010 |
|
RU2439798C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2024 |
|
RU2832107C1 |
Изобретение относится к области пассивной радиолокации и может быть использовано в системе радиотехнического контроля для определения местоположения наземного стационарного источника импульсных радиосигналов с фиксированным периодом повторения импульсов. Достигаемый технический результат - снижение количества приемных пунктов (до одного), необходимых для реализации разностно-дальномерного метода определения местоположения наземного источника импульсного радиосигнала, отсутствие необходимости организации между приемными пунктами высокоточной временной синхронизации и высокоскоростных каналов связи, необходимых для ретрансляции сигнала. Указанный результат достигается за счет того, что способ определения местоположения наземных стационарных источников импульсных радиосигналов основан на размещении в предполагаемом районе нахождения источника импульсных радиосигналов одного беспилотного летательного аппарата типа «конвертоплан» (далее БЛА-датчик), оснащенного блоком навигационно-временного обеспечения, ненаправленной антенной, радиоприемным устройством, устройством формирования «виртуального» опорного импульсного сигнала и приемопередатчиком, обнаружении БЛА-датчиком импульсного радиосигнала с фиксированным периодом следования импульсов, измерении разности времени прихода радиосигнала в пространственно-разнесенных точках наблюдения, при этом общее количество точек наблюдения не менее трех, передаче полученных значений на наземный пункт управления и обработке и определении местоположения источника импульсного радиосигнала разностно-дальномерным методом, при этом оценивание разности времени прихода сигнала в пространственно-разнесенных точках наблюдения осуществляется за счет сравнения времени прихода импульсов принимаемого радиосигнала в точках наблюдения с опорной «виртуальной» копией, которая формируется на борту БЛА-датчика в первой точке наблюдения и генерируется в течение всего времени наблюдения за источником. 3 ил.
Способ определения местоположения наземных стационарных источников импульсных радиосигналов, основанный на размещении в предполагаемом районе нахождения источника импульсных радиосигналов одного беспилотного летательного аппарата типа «конвертоплан» (далее БЛА-датчик), оснащенного блоком навигационно-временного обеспечения, ненаправленной антенной, радиоприемным устройством, устройством формирования «виртуального» опорного импульсного сигнала и приемопередатчиком, обнаружении БЛА-датчиком импульсного радиосигнала с фиксированным периодом следования импульсов, измерении разности времени прихода радиосигнала в пространственно-разнесенных точках наблюдения, при этом общее количество точек наблюдения не менее трех, передаче полученных значений на наземный пункт управления и обработке и определении местоположения источника импульсного радиосигнала разностно-дальномерным методом, отличающийся тем, что оценивание разности времени прихода сигнала в пространственно-разнесенных точках наблюдения осуществляется за счет сравнения времени прихода импульсов принимаемого радиосигнала в точках наблюдения с опорной «виртуальной» копией, которая формируется на борту БЛА-датчика в первой точке наблюдения и генерируется в течение всего времени наблюдения за источником.
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ В ТРЕХМЕРНОМ ПРОСТРАНСТВЕ | 2017 |
|
RU2643360C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2014 |
|
RU2582592C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2006 |
|
RU2327181C1 |
| JP 2013140049 A, 18.07.2013 | |||
| US 9128173 B1, (LEID), 08.09.2015 | |||
| WO 1987006335 A, 22.10.1987 | |||
| Транспортировочный контейнер для переноса удаленных зубов | 2024 |
|
RU2836554C1 |

