Изобретение относится к области радиотехники и может быть использовано в многопозиционных радиотехнических системах, установленных на летательных аппаратах, для определения координат источников импульсного радиоизлучения (ИРИ).
Известен разностно-дальномерный способ пеленгования источника радиоизлучения и реализующее его устройство (см. 1. Патент РФ на изобретение №2204145, М. кл. G01S 3/46, опубл. 10.05.2003 г.), основанный на приеме сигналов источника радиоизлучения (ИРИ) тремя антеннами, образующими две пары равных ортогональных измерительных баз, измерении разности времен приема сигнала ИРИ антеннами, образующими ортогональные измерительные базы, вычислении значения суммы и разности разностей времен приема сигнала ИРИ, вычислении значения отношения суммы разностей времен приема сигнала ИРИ к разности разностей времен приема сигнала ИРИ, вычислении значения функции arctan(w), в качестве аргумента которой принимается результат предыдущей операции, вычислении значения координат точки, принадлежащей линии положения ИРИ, отображении полученных результатов.
В данном способе предъявляются жесткие требования к размещению антенн приемных пунктов (требование равенства измерительных баз), что снижает функциональные возможности системы.
Известен разностно-дальномерный способ определения координат источника радиоизлучения (см. 2. Патент РФ на изобретение №2521084, M. кл.. G01S 3/46, опубл. 27.06.2014), основанный на приеме сигнала ИРИ разнесенными пунктами приема и обработки, имеющими общий пункт управления, связанными между собой командными линиями связи и линиями аналоговой ретрансляции сигнала, при этом в каждом пункте приема и обработки измеряется отношение сигнал/шум, результаты измерений передаются на пункт управления, сравниваются между собой, по результатам сравнения решение задачи вычисления координат посредством совместной обработки радиосигналов возлагается на пункт приема и обработки с наименьшим отношением сигнал/шум, причем выбранный пункт приема и обработки, используя собственный принятый сигнал источника радиоизлучения и сигналы источников радиоизлучения, полученные по линиям аналоговой ретрансляции с других пунктов приема и обработки, производят вычисление координат источника радиоизлучения.
В данном способе необходимо определять величину отношения сигнал/шум в каждом приемном пункте и применить соответствующий алгоритм вычисления местоположения ИРИ. Поскольку величина отношения сигнал/шум может подвергаться сильным изменениям, то это может вызывать сбои вычислительного процесса.
Известен разностно - дальномерный способ определения координат источника радиоизлучения (см. 3. Патент РФ на изобретение №2568104, М. кл. G01S 3/00, опубл. 10.11.2015), основанный на приеме сигнала ИРИ разнесенными в пространстве периферийными пунктами приема (ППП), связанными с центральным пунктом приема и обработки (ЦППО) командными линиями связи и линиями аналоговой ретрансляции сигнала, причем по командным линиям связи с ЦППО на ППП передаются команды настройки на частоту сигнала источника радиоизлучений, а по линиям аналоговой ретрансляции принятые в ППП сигналы ИРИ передаются на ЦППО, где измеряются разности времени приема этих сигналов в ППП и ЦППО, а также производится вычисление координат ИРИ, при этом разности времени приема ретранслированных сигналов ИРИ между пунктами приема, определяются как аргумент максимизации взаимно корреляционной функции.
В данном способе сказывается влияние нестабильности параметров линий аналоговой ретрансляции на положение максимума взаимно корреляционной функции, что приводит к появлению дополнительных ошибок.
Известен способ получения радиотехнической информации и радиотехнический комплекс для его осуществления (см. 4. Патент РФ на изобретение №2599259, М. кл. G01S 5/04, опубл. 10.10.2016), применимый для получения радиотехнической информации станциями радиотехнической разведки в составе многопозиционного комплекса пассивной локации с последовательным сканированием радиоизлучений от воздушных объектов, заключающийся в том, что синхронизированными между собой по времени и разнесенными на местности каждой парой приемных постов станций радиотехнической разведки через датчики с последовательным сканированием по частоте получают данные пассивного радиоизлучения от воздушных объектов -разность времени приема радиоизлучения, несущую частоту бортового радиоэлектронного средства воздушного объекта и момент времени получения измерения пеленга, данные направляют на центральный приемный пост, преобразуют в единую центральную декартову систему координат с началом в центральном приемном посту и привязывают к имеющимся на сопровождении радиотехническим траекториям воздушных объектов, на множестве изолированных радиотехнических отметок по воздушному объекту, сформированных при сканировании, производят операцию фильтрации результатов решения разностно - дальномерной задачи обнаружения радиотехнической траектории воздушного объекта в следующей последовательности: определяют размеры стробов автозахвата воздушных объектов, вычисляют начальные параметры траектории и их подтверждение об обнаружении при появлении, устанавливают векторы состояния траектории воздушного объекта, составляют модель движения воздушного объекта и фильтрацию ее параметров и при сопровождении воздушного объекта по первичной радиотехнической информации на приемных постах производят одновременную первичную фильтрацию отдельных разностей времени прихода сигналов по времени их поступления, при этом движение воздушного объекта принимают прямолинейным и равномерным, а в противном случае - принимают за маневр, а формирование начальной оценки приближенного вектора параметров траектории воздушного объекта и ковариационной матрицы ошибок на приемных постах производят по первой фиксации разности времен прихода сигнала от цели, поступившей от одной пары информационных датчиков по новому воздушному объекту, далее производят окончательную фильтрацию информации с получением уточненного вектора параметров траектории каждого воздушного объекта и алгоритмической ковариационной матрицы ошибок параметров наблюдения приемных постов, выдают точную оценку параметров траектории каждого воздушного объекта для четкого отслеживания характера и параметров его полета, при этом на приемных постах фильтрацию разностно - дальномерной информации по воздушному объекту по времени ее поступления производят путем формирования вектора состояния траектории воздушного объекта, далее с учетом влияния ошибок экстраполяции производят сглаживание ошибок разности времен прихода сигнала.
В данном способе необходимо использование антенны с узким лучом, что предусматривает большой размер антенной системы и делает невозможным использование данного способа в мобильных системах радиоразведки, размещаемых на небольших БПЛА.
Известен разностно-дальномерный способ определения координат источника радиоизлучения и реализующее его устройство (см. 5. Патент РФ на изобретение №2670142, М. кл. G01S 3/46, опубл. 18.10.2018), включающий размещение четырех датчиков в разнесенных точках с известными координатами, таким образом, чтобы объем тетраэдра V1234 был больше ноля, прием сигнала излученного источником радиоизлучения каждым датчиком, определение относительного времени запаздывания прихода сигнала от источника радиоизлучения на каждый датчик, проведение операции ранжирования относительного запаздывания от наименьшего к наибольшему значению с присваиванием соответствующим точкам номера от 1 до 4, считая, что на датчик 1 сигнал пришел раньше, чем на другие датчики, размещение начала расчетной системы координат в точке 1, при этом ось ОХ проходит через точки с номерами 1 и 2, за положительное направление оси принимается направление от точки 1 к точке 2, в плоскости, образованной точками 1, 2 и 3, через точку 1 проводится ось OY перпендикулярно оси ОХ, за положительное направление выбирается направление в полуплоскость, которой принадлежит точка 3, ось OZ дополняет расчетную систему координат до правой, пересчет координат точек размещения датчиков из начальной в расчетную систему координат, составление и решение системы четырех нелинейных уравнений и определение координат источника радиоизлучения как точку пересечения поверхностей положения, при этом датчики размещены в пространстве так, что их расположение друг относительно друга не изменяется во времени.
В данном способе требуется фиксированное расположение датчиков, что снижает функциональные возможности системы.
В ряде случаев возможно определение местоположения (МП) ИРИ путем измерения разностей расстояний, образованных прямым и зеркально переотраженным Землей сигналами (см. 6 Патент РФ на изобретение №2134431, М. кл. G01S 3/46, опубл. 10.08.1999), В данном способе предусмотрена необходимость в остром луче антенны, позволяющем осуществлять пространственную фильтрацию сигналов прямого и зеркально-переотраженного поверхностью, что требует большого размера антенной системы и делает невозможным использование данного способа в мобильных системах радиоразведки, размещаемых на небольших БПЛА.
Известен способ определения координат источника радиоизлучения в трехмерном пространстве (см. 7. Патент РФ на изобретение №2643360, М Кл. G01S 5/12, опубл. 01.02.2018).
Данный способ выбран в качестве прототипа.
Сущность способа определения координат источника радиоизлучения (ИРИ) в трехмерном пространстве, состоит в доставке в район предполагаемого нахождения ИРИ БПЛА малого класса типа "мультикоптер" посредством беспилотного или пилотируемого летательного аппарата среднего класса, формировании разностно-дальномерной системы местоопределения (РДСМО) ИРИ путем размещения четырех приемных пунктов (ПП) на БПЛА, при этом каждый ПП содержит блок навигационно-временного обеспечения, ненаправленную антенну, панорамный приемник и приемопередатчик, измерении корреляционным методом временных задержек моментов приема сигнала ИРИ на периферийных и опорном ПП, при этом для формировании РДСМО ИРИ приемные пункты располагают на рассчитанных высотах в вершинах тетраэдра, причем периферийные ПП располагают в вершинах нижнего основания тетраэдра, а опорный - в вершине тетраэдра над его основанием, в сформированной РДСМО ИРИ по сигналам блоков навигационно-временного обеспечения каждого ПП осуществляют определение их координат в пространстве, привязку к собственной системе координат РДСМО и передают координатную информацию о периферийных ПП на опорный ПП, по команде с опорного ПП периферийные ПП осуществляют поиск сигнала ИРИ в заданном частотном диапазоне и при обнаружении сигнала ИРИ ретранслируют его на опорный ПП, на опорном ПП на основе вычисления корреляции между сигналом, принятым на нем, и сигналами, ретранслированными с периферийных ПП, вычисляют и отправляют на наземный пункт приема и обработки (НПУО) координаты обнаруженного ИРИ, на НПУО оценивают значение погрешности полученных координат ИРИ и в случае превышения требуемого значения, установленного оператором, осуществляют пересчет собственных координат всех ПП для их перестроения, пересчет координат осуществляют путем уточнения координат ПП относительно ИРИ с выдачей оператору варианта расположения ПП с новыми координатами, при этом уточнение координат ПП относительно ИРИ осуществляют до тех пор, пока погрешность определения координат ИРИ не установится ниже требуемого значения.
В районе предполагаемого нахождения ИРИ приемные пункты распределяют в пространстве по команде с наземного пункта управления и обработки (НПУО), формируя, таким образом, разностно - дальномерную систему (РДС). Если количество ПП равно четырем, то их располагают в вершинах тетраэдра: периферийные ПП - в вершинах его нижнего основания, а опорный в вершине над основанием. Если количество ПП больше четырех, то, в зависимости от условий и требований, их располагают в вершинах пирамиды или распределяют над несколькими ИРИ в вершинах соответствующих тетраэдров. В образованной РДС по сигналам блоков навигационно-временного обеспечения каждого ПП осуществляют определение их координат в пространстве, высокоточную привязку к собственной системе координат РДС и передачу координатной информации о периферийных ПП на опорный. По команде с него все ПП выполняют поиск сигнала ИРИ в заданном частотном диапазоне и при обнаружении сигнала ретранслируют его на опорный. Прием и ретрансляция сигнала ИРИ приемными пунктами осуществляются их панорамными приемниками и приемопередатчиками соответственно. На опорном ПП на основе вычисления корреляции между сигналом, принятым на нем, и сигналами, ретранслированными с периферийных ПП, вычисляют и отправляют на НПУО координаты обнаруженного ИРИ. На НПУО оценивается значение погрешности полученных координат и в случае превышения требуемого значения, установленного оператором, осуществляют пересчет собственных координат всех ПП для их перестроения. Такое перестроение ПП относительно ИРИ выполняется до тех пор, пока погрешность определения его координат не установится ниже требуемого значения σтреб.
Данный способ реализуется следующим образом. Множество ПП (не менее 4), конструктивно размещенных на БЛА типа "мультикоптер", доставляют посредством беспилотного или пилотируемого летательного аппарата среднего класса 1 в район предполагаемого нахождения ИРИ. Каждый ПП содержит блок навигационно-временного обеспечения, ненаправленную антенну, панорамный приемник и приемопередатчик. В районе расположения ИРИ все ПП по команде с НПУО распределяют в пространстве на рассчитанных высотах вокруг указанного района, формируя, таким образом, РДС МО. Если количество ПП равно четырем, то их располагают в вершинах тетраэдра: периферийные ПП - в вершинах его нижнего основания, а опорный в вершине над основанием. Если количество ПП больше четырех, то в зависимости от условий и требований их располагают в вершинах пирамиды или распределяют над несколькими ИРИ в вершинах соответствующих тетраэдров. В образованной РДС по сигналам блоков навигационно-временного обеспечения каждого ПП осуществляют определение их координат в пространстве, высокоточная привязка к собственной системе координат РДС и передача координатной информации о периферийных ПП на опорный ПП. По команде с него все ПП выполняют поиск сигнала ИРИ в заданном частотном диапазоне и при обнаружении сигнала ретранслируют его на опорный. Прием и ретрансляция сигнала ИРИ приемными пунктами осуществляются их панорамными приемниками и приемопередатчиками соответственно. На опорном ПП на основе вычисления корреляции между сигналом, принятым на нем, и сигналами, ретранслированными с периферийных ПП, вычисляют и отправляют на НПУО координаты обнаруженного ИРИ. На НПУО на основе расчета поверхностей равных погрешностей оценивают значение погрешности полученных координат и в случае превышения требуемого значения σтреб., установленного оператором, осуществляют пересчет собственных координат всех ПП для их перестроения. Это необходимо для снижения погрешности определения координат обнаруженного ИРИ, который изначально может находиться на границе предполагаемого района именно в зоне высокой погрешности. Пересчет координат ПП выполняется для уточнения координат ПП относительно ИРИ с выдачей оператору одного (четыре ПП) или нескольких (ПП больше четырех) вариантов расположения ПП уже с их новыми координатами. Такое уточнение координат ПП относительно ИРИ выполняют до тех пор, пока погрешность определения его координат не установится ниже требуемого значения. Для пересчета требуются следующие исходные данные, которые вводятся (выбираются из возможных) оператором на НПУО перед началом выполнения задания.
1. Характеристики ПП (частота дискретизации, динамический диапазон, полоса приема и т.д.), в том числе характеристики БЛА, на которых они размещаются.
2. Количество ПП и соответственно БЛА, на которых они размещаются. Минимальное число ПП равно четырем.
3. Требуемая погрешность определения координат ИРИ σтреб. - задается исходя из условий функционирования и заданных требований.
4. Цифровая карта местности (ЦКМ) выполнения задания, предназначенная для оценки возможности пространственного перестроения ПП и графического отображения обстановки в исследуемом районе.
5. Вычисленные первоначальные собственные координаты ПП относительно предполагаемого района нахождения ИРИ.
Функционирование способа начинается с обнаружения сигнала ИРИ и определения его координат на опорном ПП. Вычисленные координаты обнаруженного ИРИ отправляются на НПУО, где на основе расчета поверхностей равных погрешностей оценивается значение погрешности полученных координат. Полученное значение сравнивается с требуемым σтреб. и в случае его превышения осуществляется оценка возможности пространственного перестроения ПП исходя из их характеристик (в том числе характеристик БЛА) и цифровой карты местности (различные неровности и препятствия, климатические условия, т.д.). При положительном результате выполняется формирование возможных вариантов построения ПП в пространстве и, при необходимости, увеличение их числа. Уточнение координат ПП для их перестроения относительно ИРИ осуществляется до тех пор, пока погрешность определения его координат не установится ниже требуемого значения (в идеальном случае может быть получено минимально возможное значение погрешности, которое обеспечивается при размещении опорного ПП над ИРИ). В этом случае координатная информация с отображением на ЦКМ выдается оператору НПУО. В случае отрицательного результата возможности перестроения ПП в пространстве координатная информация также выдается оператору НПУО с отображением на ЦКМ, но с уведомлением о высокой погрешности измеренных координат обнаруженного ИРИ и отсутствия возможности ее снижения.
Расчет поверхностей равной погрешности относительно ИРИ осуществляют на основе вычисления погрешности местоположения (МП) ИРИ в каждой точке исследуемого пространства. При этом основой разностно- дальномерного способа определения МП является измерение разности расстояний от ИРИ до размещенных в разных точках пространства опорного и периферийных ПП. Расстояние от ИРИ до i-го ПП в пространстве описывается выражением

где (x,y,h) - координаты ИРИ, (xi,yi,hi) - координаты i-го ПП в пространстве, i=1,…,N - номер ПП, N - количество ПП.
Погрешность МО ИРИ в пространстве рассчитывается в соответствии с выражением
где σΔr - погрешность определения разности расстояний; tr() - след матрицы; Н - матрица частных производных от Ri, (Н)T - транспонированная матрица, (Н)-1 - обратная матрица.
Матрица (HTH)-1 является ковариационной матрицей погрешностей МО ИРИ, а элементы ее главной диагонали представляют собой дисперсии ошибок пространственных координат  .
.
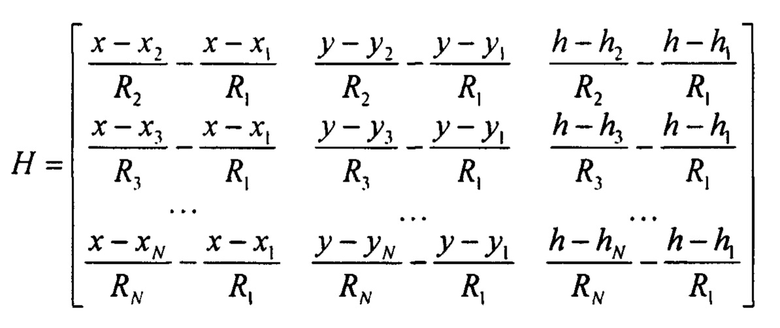
Матрица частных производных по  для РДС имеет вид
для РДС имеет вид
Это позволяет снизить погрешность определения координат ИРИ до минимально возможного значения, которое обеспечивается при размещении опорного ПП над ИРИ.
В данном способе-прототипе требуется длительное время определения местоположения искомого ИРИ с заданной точностью, вызванное необходимостью пространственного перемещения ПП с целью повышения точности определения МП ИРИ и удержание всей системы в заданной геометрии. Это налагает ограничения по количеству ИРИ, обслуживаемых системой, поскольку для каждого ИРИ необходимо корректировать пространственное положение ПП. Кроме того, высота полета ИРИ может быть выше или недосягаемой для опорного БПЛА. Необходимость ретрансляции принимаемых сигналов ИРИ с каждого ПП па опорный ПП приводит к появлению дополнительных ошибок определения координат ИРИ. Способ также не предусматривает использование дополнительных измерений, обусловленных зеркальным переотражением радиоволн от Земной поверхности.
Технический результат изобретения заключается в повышении точности определения местоположения ИРИ путем приема как прямых, так и зеркально переотраженных землей сигналов, измерении их временного рассогласования. При этом возможно использование ненаправленной антенны или антенны с широкой диаграммой направленности для обеспечения возможности реализации способа в малогабаритных системах, устанавливаемых на БПЛА
Достижение указанного технического результата обеспечивается в предлагаемом способе определения местоположения источника радиоизлучения (ИРИ) в трехмерном пространстве динамической системой радиоконтроля путем размещения, по меньшей мере, трех приемных пунктов (ПП) на соответствующих беспилотных летательных аппаратах (БЛА), каждый из которых содержит блок навигационно-временного обеспечения, ненаправленную антенну, панорамный приемник и передатчик, при этом по сигналам блоков навигационно-временного обеспечения в каждом ПП осуществляют определение их координат в пространстве, передают координатную информацию на наземный пункт управления и обработки (НПУО), отличающемся тем, что каждый ПП при обнаружении прямого сигнала ИРИ ретранслирует момент его обнаружения на НПУО, при этом на каждом ПП так же определяют наличие зеркально переотраженного земной поверхностью сигнала, ретранслируют момент его обнаружения на НПУО, где измеряют величину задержки между прямыми сигналами, принятыми в различных ПП и величину задержки между прямым и зеркально переотраженным землей сигналом в каждом ПП, вычисляют разности расстояний путей прохождения прямых сигналов от ИРИ до каждого ПП и разности расстояний путей прохождения прямого и зеркально переотраженного землей сигнала в каждом ПП, при этом на основе вычисления разности путей прохождения от ИРИ до каждого ПП прямых сигналов, принятых резличными ПП, и разности пути прохождения прямого и зеркально переотраженного землей сигнала в каждом ПП вычисляют местоположение ИРИ в трехмерном пространстве.
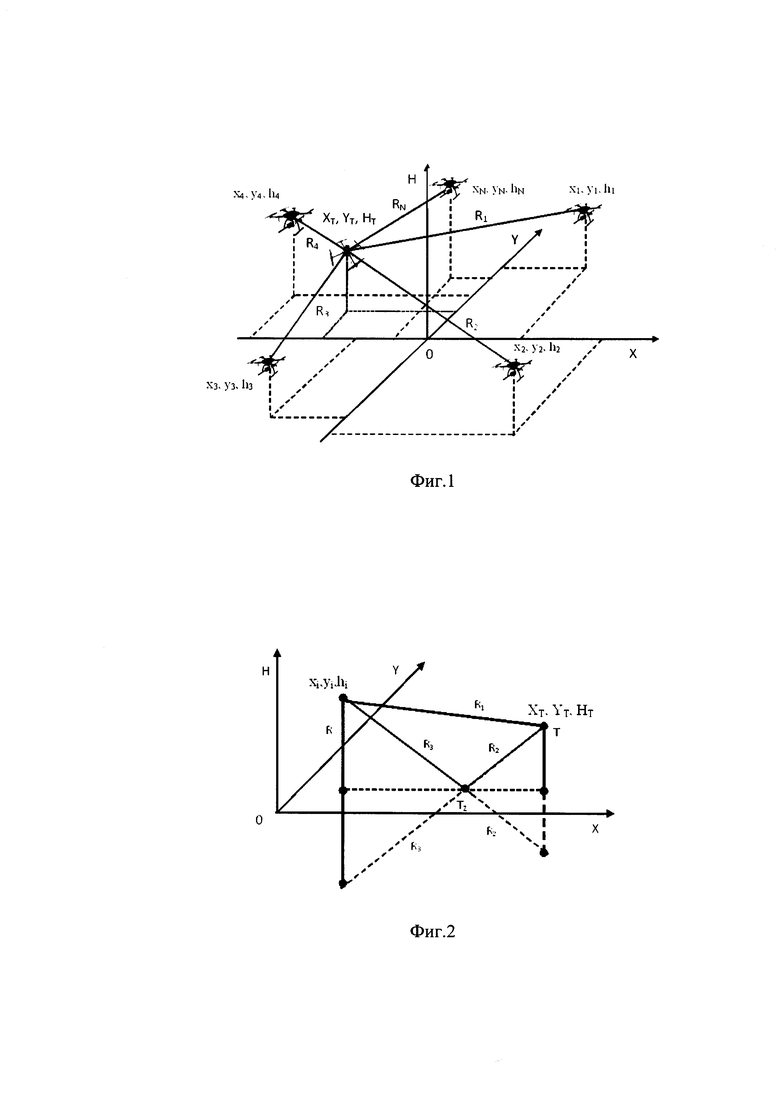
Достижение указанного технического результата приведенными отличиями можно пояснить с использованием геометрических построений, представленных на фиг. 1 и фиг. 2.
Фиг. 1 иллюстрирует расположениеN ПП стандартной разностно-дальномерной системы, содержащей  - приемных позиций, в которой можно получить
- приемных позиций, в которой можно получить  линейно независимых измерений разностей расстояний
линейно независимых измерений разностей расстояний

где:  - вектор искомых координат ИРИ; xi,yi,hi - известные координаты приемных позиций
- вектор искомых координат ИРИ; xi,yi,hi - известные координаты приемных позиций  .
.
Фиг. 2 иллюстрирует траектории распространения прямого и переотраженного землей сигналов от ИРИ до любого ПП, из представленных на фиг. 1, где обозначено: xi,yi,hi,  - известные координаты каждого приемного пункта, Т - искомые координаты ИРИ с неизвестными координатами XT, YT, HT, Tz - участок подстилающей поверхности, формирующей зеркальное отражение, R1 - расстояние между ИРИ и приемной позицией, R2 - расстояние между ИРИ и центром участка поверхности зеркального отражения - Tz. R3 - расстояние между участком поверхности зеркального отражения - Tz и приемной позицией. Очевидно, что разность расстояний
- известные координаты каждого приемного пункта, Т - искомые координаты ИРИ с неизвестными координатами XT, YT, HT, Tz - участок подстилающей поверхности, формирующей зеркальное отражение, R1 - расстояние между ИРИ и приемной позицией, R2 - расстояние между ИРИ и центром участка поверхности зеркального отражения - Tz. R3 - расстояние между участком поверхности зеркального отражения - Tz и приемной позицией. Очевидно, что разность расстояний  между прямыми и зеркально переотраженными земной поверхностью сигналами будет равна
между прямыми и зеркально переотраженными земной поверхностью сигналами будет равна

Такой подход позволяет получить N измерений разностей расстояний, образованных прямым и переотраженным сигналом.
Выражение (2) образует эллиптическую (суммарно-дальномерную) поверхность положения: ИРИ-участок земной поверхности - приемная позиция с образованием базы в вертикальной плоскости, параметрами которой являются соотношения высот ИРИ и БПЛА. Наличие избыточных измерений в (2) позволяет их включить в задачу определения местоположения ИРИ.
Очевидно, что применение (2) возможно только в случае разрешения сигналов по времени и когда зеркально-переотраженный сигнал по мощности превышает сигналы от других локальных источников отражения по трассе распространения радиоволн не менее чем в трех ПП. На основании (1) и (2) составим систему нелинейных уравнений
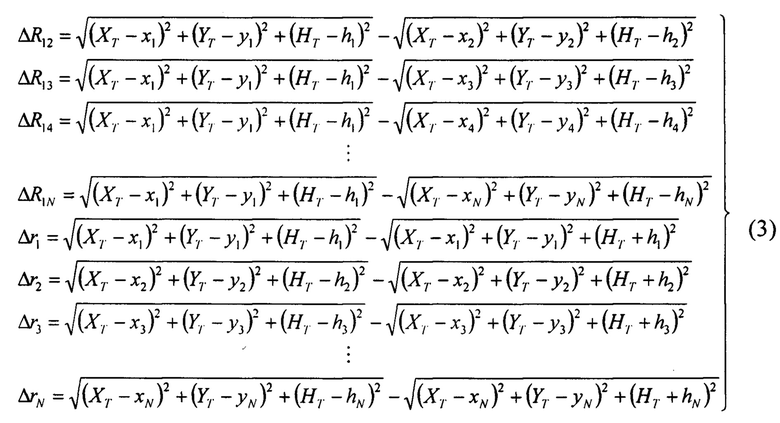
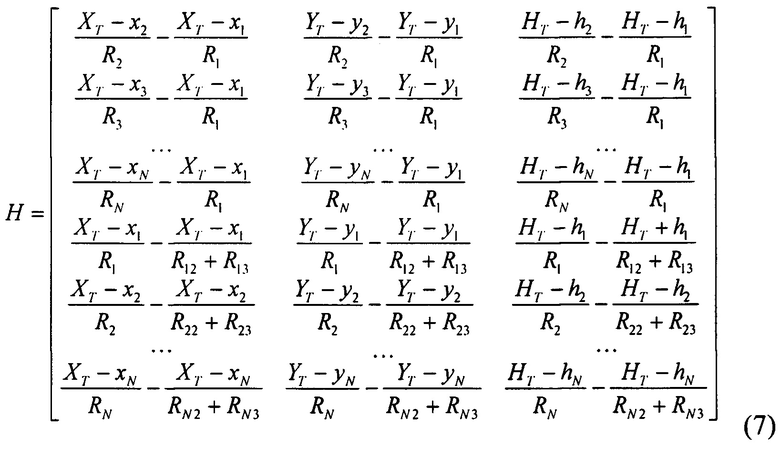
Нелинейную систему уравнений (3) можно решить с использованием метода наименьших квадратов (МНК) Матрицы для Гаусс-Ньютона:

где: ZRD - вектор искомых координат XT, YT, HT, (можно записать и как ZRD = [RT, XT, YT, HT]T)
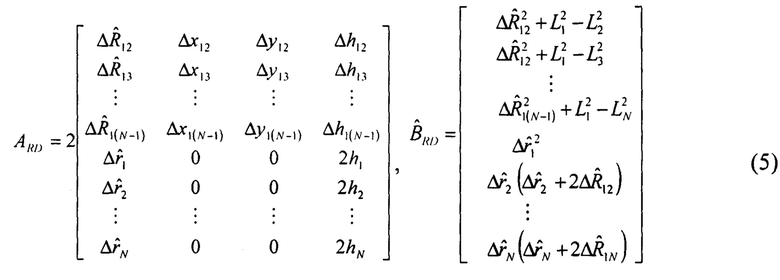
Δxij = xi - xj, Δyij = yi - yj , Δhij = hi - hj - разности координат приемных позиций;
 ,
,  - диагональная стохастическая матрица, причем элементы
- диагональная стохастическая матрица, причем элементы  этой матрицы в зависимости от наличия или отсутствия того или иного измерения и при превышении разности расстояний между прямым и переотраженным сигналом
этой матрицы в зависимости от наличия или отсутствия того или иного измерения и при превышении разности расстояний между прямым и переотраженным сигналом  некоторой пороговой величины
некоторой пороговой величины  , (т.е.
, (т.е.  ) принимают два возможных значения λij = 1 или λij = 0.
) принимают два возможных значения λij = 1 или λij = 0.
Введение элементов матрицы  - позволяет в решении задачи учитывать реальный состав результатов измерений, вызванных как статистикой процедур обнаружения, так и разрешения сигналов.
- позволяет в решении задачи учитывать реальный состав результатов измерений, вызванных как статистикой процедур обнаружения, так и разрешения сигналов.
Погрешность определения координат ИРИ в пространстве рассчитывается в соответствии с выражением

где tr() - след матрицы; Н - матрица частных производных от Ri, (Н)T - транспонированная матрица, (Н)-1 - обратная матрица, W - матрица дисперсий определения координат.
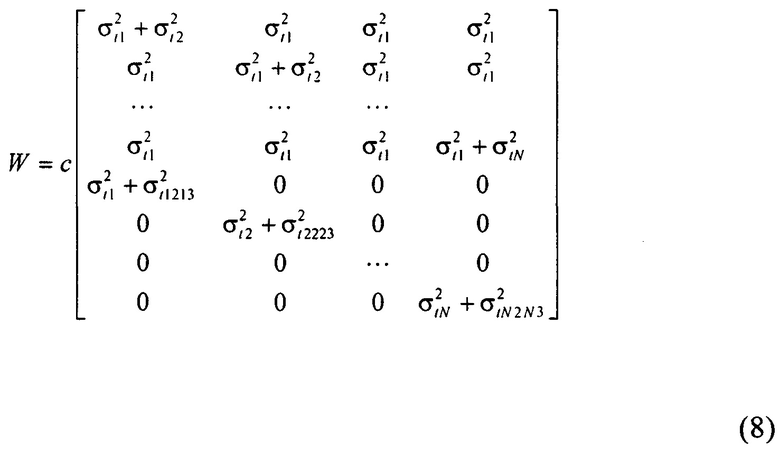
 - дисперсии определения времени приема сигналов при их приеме на соответствующих приемных пунктах;
- дисперсии определения времени приема сигналов при их приеме на соответствующих приемных пунктах;
 - дисперсии определения времени приема сигналов переотраженных земной поверхностью на соответствующих приемных пунктах.
- дисперсии определения времени приема сигналов переотраженных земной поверхностью на соответствующих приемных пунктах.
Величины дисперсий могут задаваться как априорно, исходя из технических характеристик приемо-усилительных трактов, так и оцениваться в реальном масштабе времени по зависимостям: 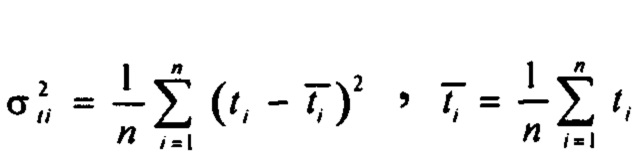 , где ti - момент приема сигналов, n - количество отсчетов.
, где ti - момент приема сигналов, n - количество отсчетов.
В связи с тем, что, как показано выше, при определении координат ИРИ в предлагаемом способе используется как информация о прямом, так и о зеркально-переотраженном сигналах, точность определения координат ИРИ повышается.
Предложенный способ поясняется следующими фигурами:
Фиг. 1 - иллюстрация расположения ПП относительно ИРИ;
Фиг. 2 - иллюстрация траекторий распространения сигнала от ИРИ до любого из ПП, с учетом сигнала, переотраженного поверхностью земли;
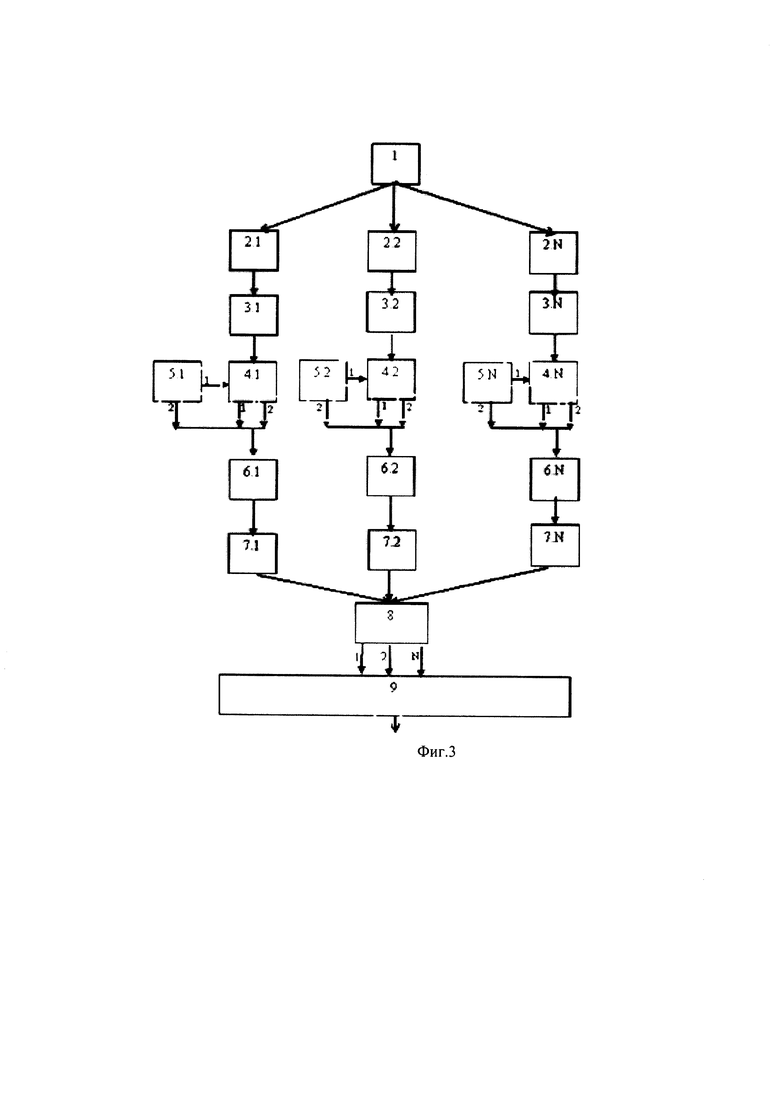
Фиг. 3 - структурная схема системы, реализующей предлагаемый способ;
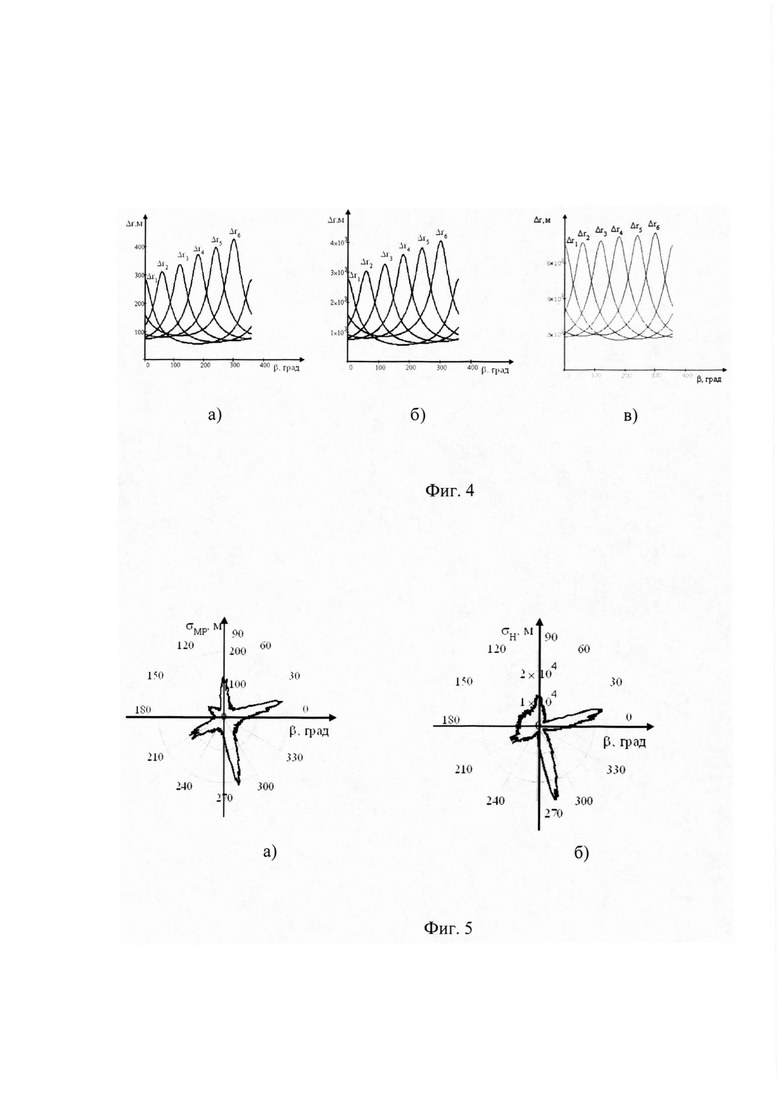
Фиг. 4 - приведены разности расстояний между прямым и переотраженным сигналом для случая различных высот полета пеленгаторов. На фиг. 4а) при h1=0.01L, h2=0.011L, h3=0.012L, h4=0.013L, h5=0.014L, h6=0.015L, для фиг. 4б) при h1=0.1L, h2=0.11L, h3=0.12L, h4=0.13L, h5=0.14L, h6=0.15L и для фиг. 4в) при h1=0.3L, h2=0.31L, h3=0.32L, h4=0.33L, h5=0.34L, h6=0.35L;
Фиг. 5 - СКО ошибки определения местоположения  (фиг. 5а) и высоты
(фиг. 5а) и высоты  (фиг. 5б) полета ИРИ, полученные при традиционном решении разностно - дальномерной задачи;
(фиг. 5б) полета ИРИ, полученные при традиционном решении разностно - дальномерной задачи;
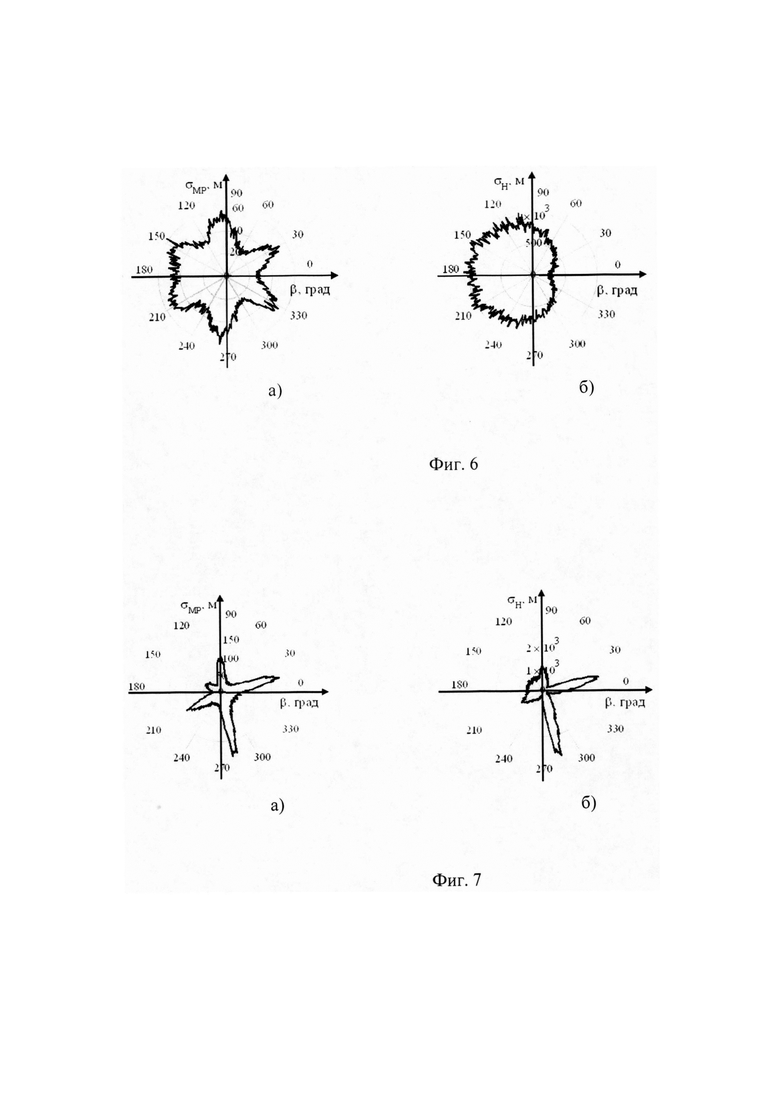
Фиг. 6 - СКО ошибки определения местоположения (фиг. 6а) и высоты (фиг. 6б) полета ИРИ, полученные при использовании результатов измерений между прямыми и переотраженными сигналами для случая, приведенного на фиг. 4а);
Фиг. 7 - СКО ошибки определения местоположения (фиг. 7а) и высоты (фиг. 7б) полета ИРИ, полученные при традиционном решении разностно -дальномерной задачи;
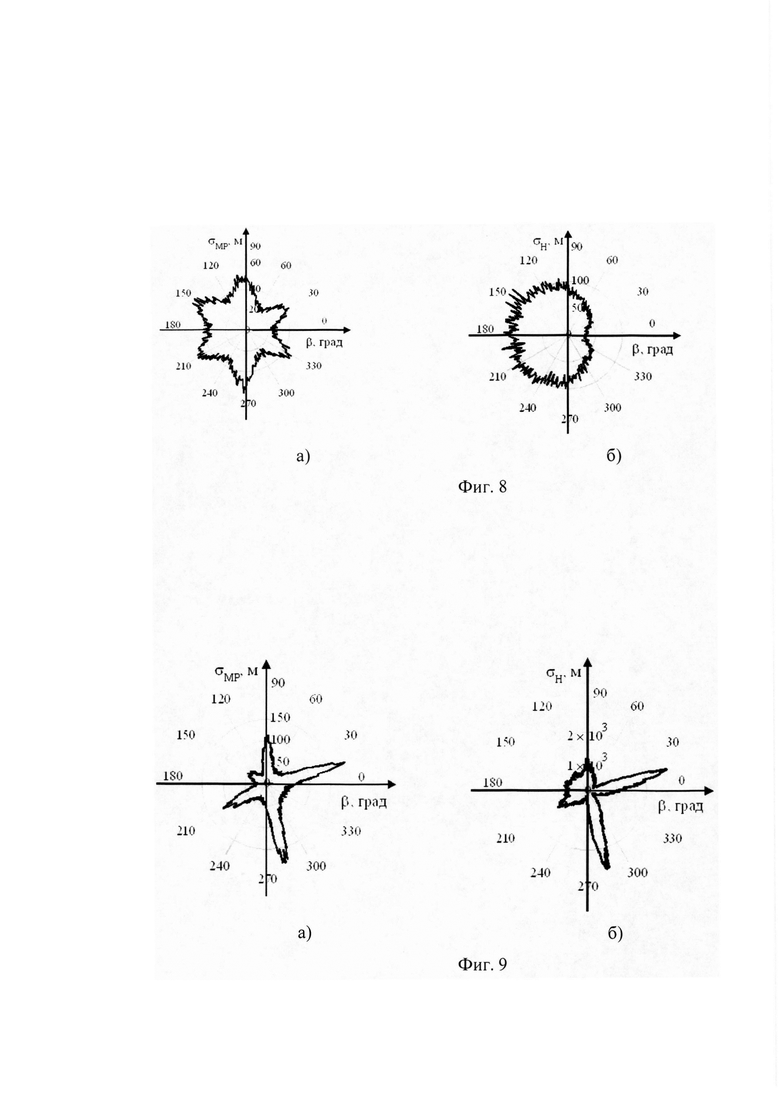
Фиг. 8 - СКО ошибки определения местоположения (фиг. 8а) и высоты (фиг. 8б) полета ИРИ, полученные при использовании измерений между прямыми и переотраженными сигналами для случая приведенного на фиг. 4б);
Фиг. 9 - СКО ошибки определения местоположения (фиг. 9а) и высоты (фиг. 9б) полета ИРИ полученные при традиционном решении задачи фиг. 4в);
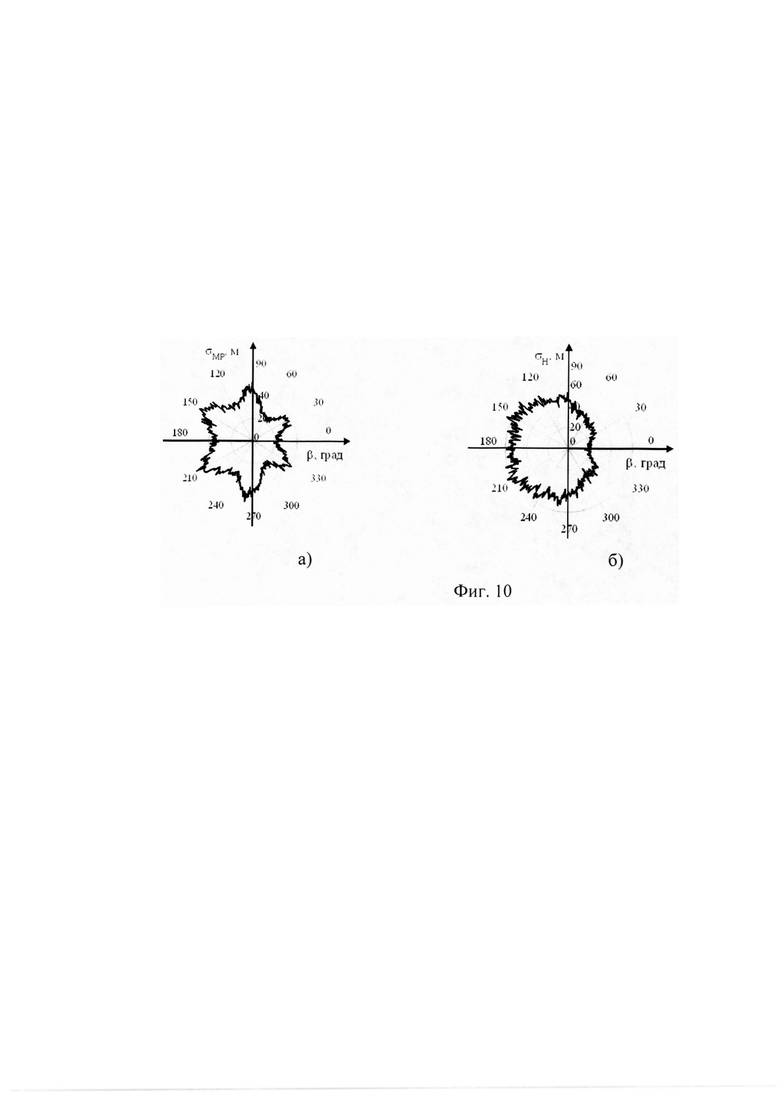
Фиг. 10 приведены СКО ошибки определения местоположения (фиг. 10а) и высоты (фиг. 10б) полета ИРИ полученные при использовании измерений между прямыми и переотраженными сигналами для случая приведенного на фиг. 4в);
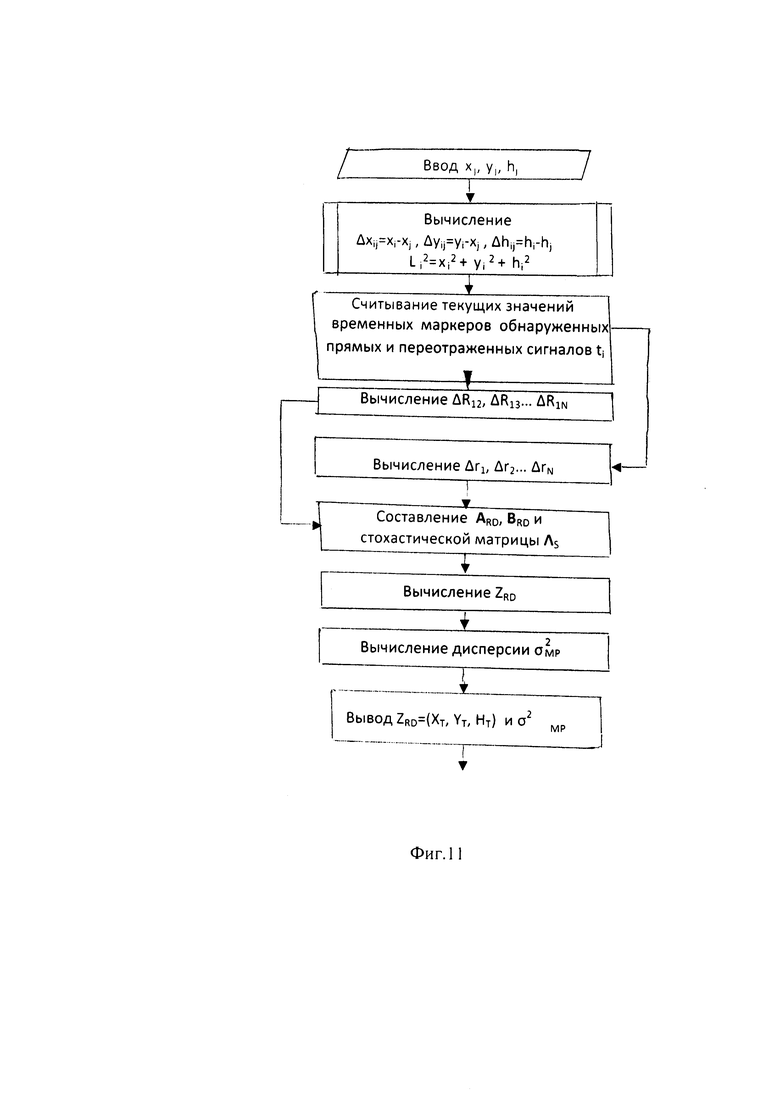
Фиг. 11 - алгоритм работы вычислительного устройства 9 наземного пункта управления и обработки (НПУО фиг. 3).
Предлагаемый способ может быть, например, реализован системой, структурная схема которой приведена на фиг. 3. где обозначено:
1 - источник радиоизлучения (ИРИ);
2.1,2.2..2.N- ненаправленные антенны;
3.1,3.2..3.N - панорамные приемники;
4.1,4,2..4.N - двухпороговые обнаружители,
5.1,5.2..5.N - блоки навигационно-временного обеспечения;
6.1,6.2..6.N передатчики;
7.1,7.2..7.N - антенны передающих устройств;
8. - радиоприемное устройство наземного пункта управления и обработки;
9. - вычислительное устройство наземного пункта управления и обработки (НПУО).
При этом выход ИРИ 1 связан с ненаправленными антеннами 2.1,2.2..2.N, выходы каждой из которых соединены с входами соответствующих панорамных приемников 3.1,3.2..3.N, выходы которых подключены к входам двухпороговых обнаружителей 4.1,4,2..4.N, к другим соответствующим входам которых также подключены первые выходы блоков 5.1,5.2..5.N навигационно-временного обеспечения, вторые выходы которых связаны с входами соответствующих передатчиков 6.1,6.2..6.N, к которым также подключены первые и вторые выходы двухпороговых обнаружителей 4.1,4,2..4.N, а выходы каждого из передатчиков 6.1,6.2..6.N через антенны соответствующих передающих устройств 7.17.2..7.N связаны с соответствующими входами радиоприемного устройства 8 наземного пункта управления и обработки, соответствующими выходами связанного с соответствующими входами вычислительного устройства 9 наземного пункта управления и обработки (НПУО), выход которого является выходом системы определения координат источника радиоизлучения в трехмерном пространстве.
Предлагаемый способ реализуется в данной системе следующим образом. Сигналы, излучаемые ИРИ 1, принимаются ненаправленными антеннами ПП 2.1-2.N, усиливаются и детектируются в трактах панорамных приемников 3.1-3.N, и далее поступают на двухпороговое устройство 4.1,4.2,..4.N где, при превышении верхнего порога обнаружения, фиксируется время приема прямых сигналов посредством временных маркеров, приходящих от блоков 5.1-5.N навигационно-временного обеспечения по первым выходам, и определяющих моменты прихода прямых сигналов в системе отсчета времени, единой для всех ПП и НПУО, которые, в свою очередь, синхронизируются данными спутниковых навигационных систем. Маркеры обнаруженных прямых сигналов поступают по первым выходам блоков 4.1,4.2,..4.N на входы соответствующих передатчиков 6.1,6.2..6.N, куда также приходят по вторым выходам блоков 5.1-5.N навигационно-временного обеспечения текущие координаты xi,yi,hi каждого ПП. С выходов соответствующих передатчиков 6.1,6.2..6.N сигналы поступают на антенны 7.1,7.2..7.N, которыми излучаются в пространство, принимаются радиоприемным устройством 8 наземного пункта управления и обработки (НПУО) и поступают на соответствующие входы - вычислительного устройства 9 наземного пункта управления и обработки (НПУО). Даже при отсутствии зеркально-переотраженных сигналов этой информации достаточно для определения, как и в прототипе, местоположения ИРИ, однако точность определения высоты ИРИ будет ниже, чем при поступлении зеркально-переотраженных сигналов, что отчетливо видно по результатам моделирования на фиг. 9. и фиг. 10.
Для исключения одновременного срабатывания верхнего и нижнего порогов обнаружения двухпорогового устройства 4.1,4,2..4.N от прямых сигналов, осуществляется блокировка нижнего порога на интервал времени превышения сигналом верхнего порога. Сигналы, переотраженные землей и имеющие значительно меньшую амплитуду, приходящие через интервал времени τi, обнаруживаются при превышении ими нижнего порога обнаружения двухпорогового обнаружителя 4.1,4,2..4.N. В каждом ПП в момент обнаружения сигнала, переотраженного земной поверхностью, на вторых выходах двухпороговых обнаружителей 4.1,4,2..4.N появляются временные маркеры обнаруженных переотраженных сигналов.
Маркеры обнаружения прямых сигналов ИРИ с первого выхода блока 4.1-4.N, маркеры зеркально-переотраженных землей сигналов со второго выхода блока 4.1-4.N, а также текущие координаты xi,yi,hi приемных пунктов, получаемые по вторым выходам блоков 5.1,5.2…5.N навигационно-временного обеспечения, поступают в передатчики 6.1-6.N, и далее в соответствующие антенны 7.1-7.N. которыми излучаются.
Данная информация принимаются радиоприемным устройством 8 наземного пункта управления и обработки и поступает в вычислительное устройство 9 наземного пункта управления и обработки (НПУО) по соответствующим N входам, равным количеству ПП (минимум 3),где по формулам (4)-(8), определяются координаты ИРИ в выбранной системе отсчета и среднеквадратичные значения ошибок определения местоположения ИРИ. Порядок расчета показан на блок-схеме алгоритма расчета местоположения источника ИРИ (см. фиг. 11). Выход вычислительного устройства 9 является выходом системы.
На вычислительном устройстве 9 наземного пункта управления и обработки, на основе расчета погрешностей определения местоположения, может быть при необходимости осуществлен, как и в прототипе, выбор такой топологии размещения позиций, при которой погрешность определения местоположения ИРИ минимизируется.
Моделирование проводилось для случая движения ИРИ по окружности при Ro = 0.75L и постоянной высоте ИРИ равной HT = 0. 5L. Ошибки измерений полагались функционально связанными с отношением сигнал/шум и составляют величину для разности расстояний, измеренной относительно пар приемных позиций σΔR = 10÷15 м, а для разности расстояний между прямым и переотраженным сигналом σΔr = 15÷27 м.
Рассмотрим пример выполнения блоков системы для реализации способа определения координат источника радиоизлучения в трехмерном пространстве динамической системой радиоконтроля.
Ненаправленные антенны 2.1,2.2…2.N и антенны 7.1,7.2…7.N передающих устройств 6.1,6.2..6.N каждого ПП могут быть выполнены, например, в виде штыревых антенн, таких как антенна типа TL-ANT2408CL;
Панорамные радиоприемники 3.1,3.2..3.N, и радиоприемное устройство 8 наземного пункта управления и обработки могут быть выполнены как в (см. 8. Проектирование радиоприемных устройств под ред. Сиверса А.П. М.: «Сов. радио», 1976 г., стр. 485, стр. 68, рис. 2.25);
Двухпороговые обнаружители 4.1,4,2..4.N могут быть выполнены на компараторе двухканальном высокоскоростном типа MAX999EUK+T, https://static.chipdip.ru/lib/301/DOC000301078.pdf;
Блоки 5.1,5.2..5.N навигационно-временного обеспечения могут быть выполнены, например, как в (см. 9 свидетельстве на полезную модель 6055, МПК G01C 21/24, опубл. 06.11.1996);
Передатчики 6.1,6.2..6.N, входящие в состав каждого ПП, могут быть выполнены, как в (см. 12. Петров Б.Е., Романюк В.А. Радиопередающие устройства на полупроводниковых приборах. Учебное пособие для радиотехнич. спец. вузов. - М.: Высш. Шк. - 1989. - 232 с. рис. В5, стр. 8).
Вычислительное устройство 9 наземного пункта управления и обработки, работающее в соответствии с блок-схемой алгоритма, представленного на фиг. 11, представляет собой устройство, реализующие эти вычислительные процедуры и может быть выполнены на соответствующих ПЛИС, используемых, например, в (см. 11. Патент на полезную модель РФ №72339 МПК G06F 15/16 опубл. 10.04.2008).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА ИМПУЛЬСНЫХ РАДИОСИГНАЛОВ | 2018 |
|
RU2695321C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ В ТРЕХМЕРНОМ ПРОСТРАНСТВЕ | 2017 |
|
RU2643360C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2526094C1 |
| Разностно-дальномерный способ определения местоположения источника радиоизлучения в условиях многолучевого распространения радиоволн | 2019 |
|
RU2714303C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ВОЗДУШНОГО ОБЪЕКТА ДИНАМИЧЕСКОЙ СИСТЕМОЙ РАДИОТЕХНИЧЕСКОГО КОНТРОЛЯ | 2017 |
|
RU2660160C1 |
| РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ В УСЛОВИЯХ МНОГОЛУЧЕВОГО РАСПРОСТРАНЕНИЯ РАДИОВОЛН | 2023 |
|
RU2805566C1 |
| Способ определения местоположения обзорной РЛС пассивным пеленгатором | 2018 |
|
RU2741331C2 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2015 |
|
RU2594759C1 |
| ОДНОПОЗИЦИОННЫЙ РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННЫХ СИГНАЛОВ | 2022 |
|
RU2801362C1 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2008 |
|
RU2363011C1 |
Изобретение относится к области радиотехники и может быть использовано в многопозиционных радиотехнических системах, установленных на летательных аппаратах, для определения координат источников импульсного радиоизлучения (ИРИ). Достигаемый технический результат - повышение точности определения местоположения ИРИ. Указанный результат достигается путем приема как прямых, так и зеркально переотраженных землей сигналов, при этом размещают, по меньшей мере, три приемных пункта (ПП) на соответствующих беспилотных летательных аппаратах, по сигналам блоков навигационно-временного обеспечения в каждом ПП осуществляют определение их координат в пространстве, передают координатную информацию на наземный пункт приема и обработки (НПУО), каждый ПП при обнаружении прямого сигнала ИРИ ретранслирует момент его обнаружения на НПУО, на каждом ПП определяют наличие зеркально переотраженного земной поверхностью сигнала, ретранслируют момент его обнаружения на НПУО, где измеряют величину задержки между прямыми сигналами, принятыми в различных ПП, и величину задержки между прямым и зеркально переотраженным землей сигналом в каждом ПП, вычисляют разности расстояний путей прохождения прямых сигналов от ИРИ до каждого ПП и разности расстояний путей прохождения прямого и зеркально переотраженного землей сигнала в каждом ПП, при этом на основе вычисления разности путей прохождения от ИРИ до каждого ПП прямых сигналов, принятых различными ПП, и разности пути прохождения прямого и зеркально переотраженного землей сигнала в каждом ПП вычисляют местоположение ИРИ в трехмерном пространстве. 11 ил.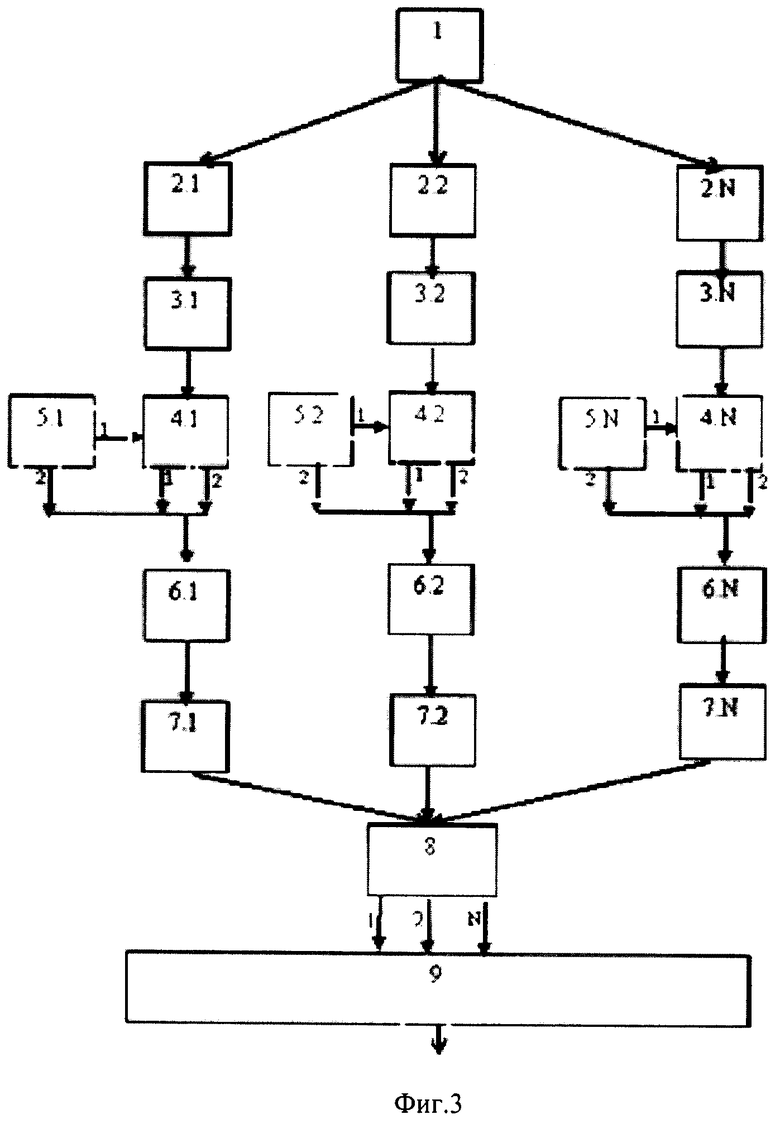
Способ определения местоположения источника радиоизлучения (ИРИ) в трехмерном пространстве динамической системой радиоконтроля путем размещения, по меньшей мере, трех приемных пунктов (ПП) на соответствующих беспилотных летательных аппаратах (БЛА), каждый из которых содержит блок навигационно-временного обеспечения, ненаправленную антенну, панорамный приемник и передатчик, при этом по сигналам блоков навигационно-временного обеспечения в каждом ПП осуществляют определение их координат в пространстве, передают координатную информацию на наземный пункт управления и обработки (НПУО), отличающийся тем, что каждый ПП при обнаружении прямого сигнала ИРИ ретранслирует момент его обнаружения на НПУО, при этом на каждом ПП также определяют наличие зеркально переотраженного земной поверхностью сигнала, ретранслируют момент его обнаружения на НПУО, где измеряют величину задержки между прямыми сигналами, принятыми в различных ПП, и величину задержки между прямым и зеркально переотраженным землей сигналом в каждом ПП, вычисляют разности расстояний путей прохождения прямых сигналов от ИРИ до каждого ПП и разности расстояний путей прохождения прямого и зеркально переотраженного землей сигнала в каждом ПП, при этом на основе вычисления разности путей прохождения от ИРИ до каждого ПП прямых сигналов, принятых различными ПП, и разности пути прохождения прямого и зеркально переотраженного землей сигнала в каждом ПП вычисляют местоположение ИРИ в трехмерном пространстве.
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ В ТРЕХМЕРНОМ ПРОСТРАНСТВЕ | 2017 |
|
RU2643360C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ВОЗДУШНОГО ОБЪЕКТА ДИНАМИЧЕСКОЙ СИСТЕМОЙ РАДИОТЕХНИЧЕСКОГО КОНТРОЛЯ | 2017 |
|
RU2660160C1 |
| РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ПЕЛЕНГОВАНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2006 |
|
RU2325666C2 |
| СПОСОБ ПРОИЗВОДСТВА ХЛЕБНОГО КВАСА | 2015 |
|
RU2582242C1 |
| JP 5125962 B2, 23.01.2013 | |||
| US 5870056 A, 09.02.1999 | |||
| WO 2013085587 A1, 13.06.2013. | |||

