ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится, в общем, к системам шахтной барабанной подъемной лебедки. В частности, оно относится к управлению барабаном подъемной лебедки системы шахтной барабанной подъемной лебедки.
УРОВЕНЬ ТЕХНИКИ
Барабаны подъемной лебедки, которые наматывают трос более чем в один слой, обычно имеют канавки Лебуса, в которые и ложится трос. Эти канавки расположены параллельно один другому, за исключением переходных секций, в которых канавка смещает трос в осевом направлении барабана на расстояние, которое равно половине диаметра троса, в направлении следующей канавки. По окружности поверхности барабана есть две переходные секции, что означает, что после полного оборота трос будет перемещен на одну канавку Лебуса диаметром в один трос. Обычно эти переходные секции являются диаметрально противоположными. Такая конфигурация называется симметричным лебусом.
Барабан обычно устанавливается около поверхности земли. Трос проходит от барабана до головного шкива в раме надшахтного копра ствола шахты. Угол троса между барабаном и головным шкивом обычно составляет порядка 45 градусов. После прохождения по головному шкиву трос идет вертикально в ствол шахты. Конец троса подсоединен к шахтной клети для перевозки персонала, минерального сырья или оборудования. Часть троса, которая находится между барабаном подъемной лебедки и головным шкивом, называется катенарной частью.
Переходная секция перебрасывает трос в течение короткого времени, прилагая к тросу «толчок» в виде почти прямоугольного "импульса" в направлении, перпендикулярном оси троса, называемый также поперечным толчком. Посредством преобразования Фурье волна от этого импульса может быть представлена в виде основной синусоидальной волны с гармоническими составляющими. Если толчок повторяется, т.е. возбуждается с частотой, которая соответствует собственной или резонансной частоте катенарной части, то амплитуда поперечных колебаний катенарной части будет возрастать до больших неприемлемых значений. Большие амплитуды будут сильно влиять на срок службы троса. Кроме того, большие амплитуды, могут вызывать дискомфорт для перевозимого клетью персонала.
Известно, что при замедлении подъема, т.е. скорости троса, когда точка приложение тяги троса находится вблизи точки, где при этой максимальной скорости может возникать резонанс катенарной части, точка резонанса сместится в другую точку приложения тяги троса, поскольку при пониженной скорости частота возбуждения или толчков лебуса на барабане будет снижена.
Для подъемных лебедок, которые в направлении вверх всегда работают на полной номинальной скорости и при постоянной нагрузке, а в направлении вниз - с нулевой полезной нагрузкой, что имеет место для промышленных подъемников, обычно в шахтном стволе достаточно иметь предварительно установленное расстояние, где скорость подъема уменьшают. Однако этого не достаточно в том случае, если полезная нагрузка и скорость клети изменяются.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения заключается в том, чтобы решить или, по крайней мере, сделать менее острыми проблемы предшествующего уровня техники.
Таким образом, в соответствии с первым объектом настоящего изобретения предложен способ управления поперечным резонансом в катенарной части системы шахтной барабанной подъемной лебедки, содержащей барабан подъемной лебедки, имеющий канавки Лебуса, головной шкив, трос, имеющий катенарную часть, продолжающуюся между барабаном подъемной лебедки и головным шкивом, и вертикальный участок троса, а также грузовую клеть (подъёмное средство), прикрепленную к вертикальному участку троса, каковой способ включает в себя а) определение текущей нагрузки грузовой клети, b) получение скорости подъемной лебедки барабана подъемной лебедки, соответствующей первой скорости грузовой клети, c) определение локализации поперечного резонанса вдоль вертикального участка троса, в котором в катенарной части, когда оно достигнуто грузовой клетью с текущей нагрузкой и на первой скорости, возникает поперечный резонанс, при этом локализация поперечного резонанса определяется на основании текущей нагрузки и на основании скорости подъемной лебедки, и d) уменьшение первой скорости грузовой клетью в зоне уменьшения скорости, которая включает в себя локализацию поперечного резонанса.
Технический эффект, достигаемый уменьшением первой скорости в зоне уменьшения скорости заключается в том, что резонансная точка смещается от точки поперечного резонанса. В результате поперечный резонанс в определенной локализации поперечного резонанса не возникает. Кроме того, поскольку вне зоны уменьшения скорости поддерживается первая скорость, то локализация поперечного резонанса, которая сместилась из-за уменьшения скорости, никогда не будет реализована9), потому что когда грузовая клеть выходит за зону уменьшения скорости, локализация перемещается в первоначально определенную область локализация поперечного резонанса. Таким образом8) поперечный резонанс в катенарной части может быть по существу исключен для любой нагрузки и для любой первой скорости грузовой клети. Поэтому каждый раз, когда грузовая клеть поднимается в стволе шахты, допустимо, чтобы ее нагрузка и(или) скорость были иными.
Один вариант осуществления включает в себя получение значения измерения первой силы от первого тензодатчика нагрузки головного шкива и значения измерения второй силы от второго тензодатчика нагрузки головного шкива, при этом этап а) включает в себя определение суммы величины сил сложением значения измерения первой силы со значения измерения второй силы, и при этом текущая нагрузка определяется на основании суммы величины сил.
В соответствии с одним вариантом исполнения текущая нагрузка определяется вычитанием веса вертикального участка троса, веса грузовой клети и веса головного шкива из суммы величины сил.
В соответствии с одним вариантом исполнения на этапе с) определение положения поперечного резонанса дополнительно основано на резонансной частоте катенарной части, диаметре барабана подъемной лебедки, частоте импульса в тросе, возникающего на переходах канавок Лебуса, длине вертикального участка троса от центральной оси головного шкива до отверстия ствола шахты, весе грузовой клети, весе троса на единицу длины и длине катенарной части.
В соответствии с одним вариантом исполнения на этапе с) определение локализации поперечного резонанса получают из справочной таблицы, которая содержит предварительно вычисленные локализации поперечного резонанса для множества комбинаций различных текущих нагрузок и первой скорости грузовой клети.
В соответствии с одним вариантом исполнения этап d) уменьшения первой скорости грузовой клети включает в себя уменьшение скорости подъемной лебедки.
Один вариант исполнения включает в себя определение зоны снижения скорости на основе скорости подъемной лебедки, полученной на этапе b), при этом определение зоны снижения скорости включает в себя извлечение зоны снижения скорости, которая была определена для положения поперечного резонанса и которая была определена на основе величин сил бокового воздействия на катенарную часть, которые пропорциональны разности между значением измерения первой силы, измеренной первым тензодатчиком нагрузки, и значением измерения второй силы, измеренной вторым тензодатчиком нагрузки.
В соответствии со вторым объектом настоящего изобретения предложен компьютерный программный продукт, включающий в себя исполнимые на компьютере компоненты, которые, будучи исполняемыми в системе (3а) обработки, вызывают осуществление системой (3) управления барабаном подъемной лебедки способов, в том виде как они заявлены по любому из пунктов 1-8.
В соответствии с третьим объектом настоящего изобретения обеспечена система управления барабаном подъемной лебедки, выполненная с возможностью управления поперечным резонансом в катенарной части системы барабанной подъемной лебедки, при этом система управления барабаном подъемной лебедки, содержит запоминающий блок и систему обработки, в которой запоминающий блок содержит исполнимые на компьютере компоненты, которые, будучи исполняемыми в системе обработки, вынуждают систему управления барабаном подъемной лебедки определять текущую нагрузку грузовой клети, получать скорость лебедки барабана подъемной лебедки, соответствующую первой скорости грузовой клети, определять локализацию поперечного резонанса вдоль вертикального участка троса, к которому прикреплена эта грузовая клеть, в каковой локализации поперечного резонанса, будучи достигнутой грузовой клетью с текущей нагрузкой и на первой скорости, в катенарной части возникает поперечный резонанс, при этом локализация поперечного резонанса определяется на основании текущей нагрузки и на основании скорости подъемной лебедки, и уменьшать первую скорость грузовой клети в зоне уменьшения скорости, которая включает в себя положение поперечного резонанса.
В соответствии с одним вариантом исполнения система обработки выполнена с возможностью получения значения измерения первой силы от первого тензодатчика нагрузки головного шкива и значения измерения второй силы от второго тензодатчика нагрузки головного шкива, в которой система обработки выполнена с возможностью определения суммы величины сил сложением значения измерения первой силы со значения измерения второй силы и в которой система обработки выполнена с возможностью определения текущей нагрузки на основе этой суммы величины сил.
В соответствии с одним вариантом исполнения система обработки выполнена с возможностью определения текущей нагрузки вычитанием веса вертикального участка троса, веса грузовой клети и веса головного шкива из суммы величины сил.
В соответствии с одним вариантом исполнения система обработки выполнена с возможностью определения локализации поперечного резонанса на основе резонансной частоты катенарной части, диаметра барабана подъемной лебедки, частоты импульса в тросе, возникающего на переходах канавок Лебуса, длины вертикального участка троса от центральной оси головного шкива до отверстия шахты, веса грузовой клети, веса троса на единицу длины и длины катенарной части.
В соответствии с одним вариантом исполнения система обработки выполнена с возможностью получения локализации поперечного резонанса из справочной таблицы, которая содержит предварительно вычисленные локализации поперечного резонанса для множества комбинаций различных текущих нагрузок и скорости подъемной лебедки.
В соответствии с одним вариантом исполнения система обработки выполнена с возможностью определения зоны снижения скорости на основе скорости подъемной лебедки, при этом система обработки выполнена с возможностью определения зоны снижения скорости извлечением зоны снижения скорости, которая была определена для локализации поперечного резонанса и которая была определена на основе величин силы бокового воздействия на катенарную часть, которые пропорциональны разности между значением измерения первой силы, измеренной первым тензодатчиком нагрузки, и значением измерения второй силы, измеренной вторым тензодатчиком нагрузки.
В соответствии с четвертым объектом настоящего изобретения обеспечена система шахтной барабанной подъемной лебедки, содержащая барабан подъемной лебедки, имеющий канавки Лебуса, головной шкив, трос, выполненный с возможностью продолжения между барабаном подъемной лебедки и головным шкивом, тем самым определяя катенарную часть и вертикальный участок троса, грузовую клеть, выполненную с возможностью прикрепления к вертикальному участку троса, двигатель (М), выполненный с возможностью управления барабаном подъемной лебедки, и систему управления барабаном подъемной лебедки по третьему объекту, выполненную с возможностью управления двигателем.
Вообще говоря, все термины, использованные в пунктах формулы изобретения, следует интерпретировать в соответствии с их обычными значениями в технической области, если в тексте определенно не указано иное. Все ссылки на какой-либо элемент, аппарат, компонент и т.д. следует интерпретировать в открытом смысле как относящиеся к по меньшей мере одному из этих элементов, аппаратов, компонентов и т.д., если определенно не указано иное.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Теперь будут описаны конкретные варианты осуществления концепции изобретения, - в качестве примера со ссылками на прилагаемые чертежи, на которых:
фиг. 1 представляет собой схематичный пример системы шахтной барабанной подъемной лебедки и системы управления барабаном подъемной лебедки;
фиг. 2 представляет собой схематичный вид спереди примера шахтной барабанной подъемной лебедки по фиг. 1;
фиг. 3a представляет собой схематичный вид сбоку детали головного шкива в системе шахтной барабанной подъемной лебедки по фиг. 1;
фиг. 3b представляет собой схематичный вид спереди детали головного шкива по фиг. 1;
фиг. 3c представляет собой схематичный вид спереди барабана подъемной лебедки и головного шкива на фиг. 1;
фиг. 4 представляет собой условную схему способа управления поперечным резонансом в катенарной части шахтной барабанной подъемной лебедки по фиг. 1; а
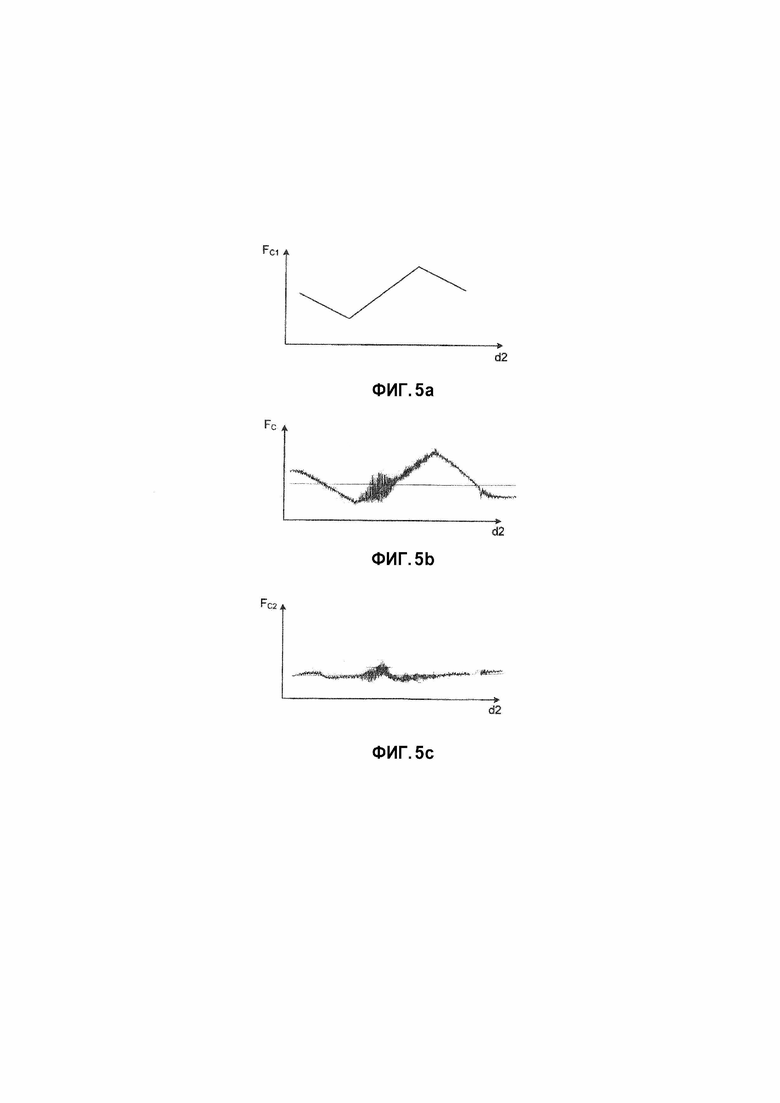
фиг. 5а-5с показывают графики величин действующих на катенарную часть боковых сил.
ПОДРОБНОЕ ОПИСАНИЕ
Далее со ссылками на сопроводительные чертежи, на которых показаны иллюстративные варианты осуществления, будет более полно описана идея изобретения. Однако идея изобретения может быть реализована во многих различных формах и не должна истолковываться как ограниченная изложенными здесь вариантами осуществления, - скорее, эти варианты приведены в качестве примера, чтобы данное описание было всеобъемлющим и завершенным и специалистам в данной области техники полностью передавало бы объем идеи изобретения. По всему описанию одни и те же ссылочные позиции относятся к одинаковым элементам.
Настоящее изобретение показывает в общих деталях, каким образом посредством определения локализации поперечного резонанса вдоль вертикального участка троса, продолжающегося от головного шкива до грузовой клети (подъёмного средства), подсоединенной к этому вертикальному участку троса, и уменьшением скорости грузовой клети в зоне уменьшения скорости, которая включает в себя место локализации поперечного резонанса, можно избежать или, по крайней мере, уменьшить поперечный резонанс в катенарной части системы шахтной барабанной подъемной лебедки. Место локализации поперечного резонанса определяется на основе текущего груза грузовой клети, который размещен в ней для перемещения по шахте посредством барабанной подъемной лебедки с требуемой скоростью, на которой грузовая клеть будет двигаться в стволе шахты в том случае, когда эта скорость предварительно запрограммирована, или с фактической текущей скоростью, на которой грузовая клеть будет перемещаться в стволе шахты в том случае, когда скорость перемещения управляется вручную.
При снижении скорости только в зоне (зонах) уменьшения скорости, в том случае, когда существуют несколько точек поперечного резонанса, точка (точки) поперечного резонанса, уходит (уходят) от ранее определенной точки (точек) поперечного резонанса.
Кроме того, настоящее изобретение детализирует, какие точки вдоль вертикального участка троса в способе управления следует классифицировать как места локализации поперечного резонанса, поскольку может существовать несколько локализаций поперечного резонанса, в которых в катенарной части клети возникает менее значительный поперечный резонанс, и в которых нет никакой необходимости уменьшать скорость перемещения. Таким образом, в этом описании, кроме того, раскрыт способ настройки, при котором для данного способа управления определяется соответствующая точка (или точки) поперечного резонанса. Кроме того, способ настройки раскрывает, каким образом выбирается зона (зоны) уменьшения скорости, и насколько должна быть уменьшена скорость перемещения клети в этой (этих) зоне (зонах) уменьшения скорости.
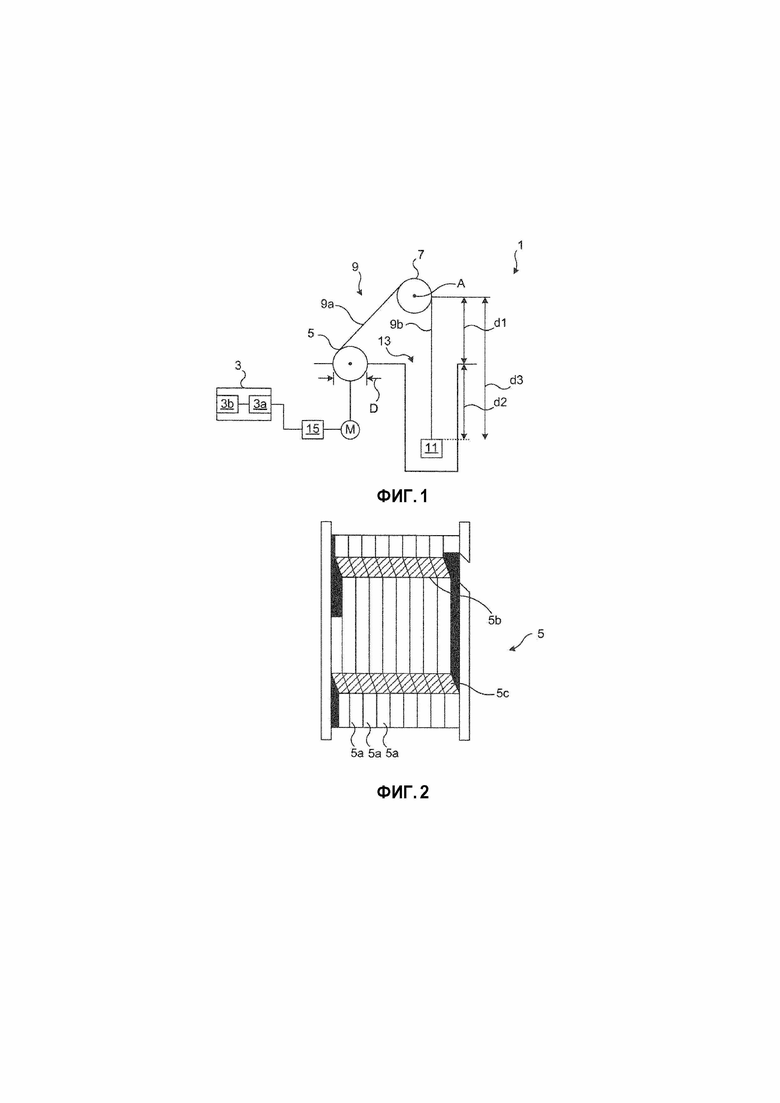
Фиг. 1 изображает систему 1 шахтной барабанной подъемной лебедки, содержащую барабан 5 подъемной лебедки типа Лебуса. Таким образом, как показано на фиг. 2, барабан 5 подъемной лебедки имеет множество канавок Лебуса. Канавки Лебуса имеют две переходные секции на оборот барабана, как это показано на фиг. 2 областями 5b и 5c. Каждая переходная секция перемещает, например, канавку 5а Лебуса в осевом направлении на величину в половину диаметра троса. Следовательно, после полного оборота каждая канавка 5а Лебуса переместит трос на один диаметр троса в осевом направлении.
Барабанная 5 подъемная лебедка может быть, например, подъемной лебедкой с одиночным барабаном или же подъемной лебедкой с двойным барабаном. Каждый из них может быть оснащен одним или двумя тросами, которые несут грузовую клеть.
Система 1 шахтной барабанной подъемной лебедки дополнительно содержит головной шкив 7, трос 9 и грузовую клеть (подъёмное средство) 11. Трос 9 намотан вокруг барабана 5 подъемной лебедки в один или более слоев, например, в три слоя. Трос 9 продолжается от барабана 5 подъемной лебедки к головному шкиву 7. Трос 9 имеет катенарную часть 9а, которая продолжается между барабаном 5 лебедки, на который в канавках 5а Лебуса намотан этот трос, и головным шкивом 7. Трос 9 имеет вертикальный участок 9b троса, который спускается от головного шкива 7 к грузовой клети. Трос 9 подсоединен или прикреплен к грузовой клети 11, так что когда барабан 5 подъемной лебедки вращается, а трос 9 наматывается или разматывается, вертикальное положение грузовой клети 11 изменяется.
Система 1 шахтной барабанной подъемной лебедки содержит первый тензодатчик 7a нагрузки и второй тензодатчик 7b нагрузки. Головной шкив 7 оснащен первым тензодатчиком 7a нагрузки и вторым тензодатчиком 7b нагрузки. Первый тензодатчик 7a нагрузки и второй тензодатчик 7b нагрузки используются для определения текущей нагрузки грузовой клети 11, а также действующей на головной шкив 7 боковой силы катенарной части.
На фиг. 1 изображено несколько вертикальных расстояний. Первое расстояние d1 определено как вертикальное расстояние от оси А головного шкива до отверстия 13 шахты, - оно является самым верхним уровнем хода грузовой клети 11. Это первое расстояние d1 фиксировано и является известным параметром. Второе расстояние d2 определено как вертикальное расстояние от отверстия шахты 13 до верхней части грузовой клети 11. Второе расстояние d2 достигает своей максимальной величины, когда грузовая клеть находится нижнем уровне хода грузовой клети1). Третье расстояние d3 определено как расстояние от оси А головного шкива до верхней части грузовой клети 11, т.е. представляет собой сумму первого расстояния d1 и второго расстояния d2. Как правило, именно второе расстояние d2 определяет локализацию поперечного резонанса вдоль вертикального участка 9b троса, что далее будет описано более подробно. Локализация поперечного резонанса представляет собой место вдоль вертикального участка 9b троса, в котором в катенарной части 9а, когда оно достигается грузовой клетью 11 с определенной нагрузкой и на определенной скорости, возникает поперечный резонанс.
Система 1 шахтной барабанной подъемной лебедки содержит систему 3 управления барабаном подъемной лебедки, имеющую систему 3а обработки и запоминающий блок 3b. Этот запоминающий блок 3b содержит исполнимые на компьютере компоненты, которые, будучи исполняемыми в системе 3а обработки, вызывают осуществление системой 3 управления барабаном подъемной лебедки описанных здесь способов. В частности, система 3 управления барабаном подъемной лебедки выполнена с возможностью определения текущей нагрузки грузовой клети 11. Система 3 управления барабаном подъемной лебедки может, например, определять текущую нагрузку на основании измерения первой силы и измерения второй силы, выполненных, соответственно, первым тензодатчиком 7a нагрузки и вторым тензодатчиком 7b нагрузки.
Кроме того, система 3 управления барабаном подъемной лебедки выполнена с возможностью получения скорости подъемной лебедки барабанной лебедки 52) в метрах в секунду, которая представляет собой скорость грузовой клети 11, называемую в данном описании первой скоростью. Скорость лебедки может быть предварительно запрограммированным параметром для управления грузовой клетью 11, или же это может быть величина, получаемая в реальном масштабе времени, например, посредством измерения числа оборотов барабана 5 подъемной лебедки в единицу времени.
Дополнительно, система 3 управления барабаном подъемной лебедки выполнена с возможностью определения локализации поперечного резонанса вдоль вертикального участка 9b троса, в которой в катенарной части 9а, когда грузовая клеть достигает ее с текущей нагрузкой и на первой скорости, возникает поперечный резонанс, и с возможностью уменьшения первой скорости грузовой клети 11 в зоне уменьшения скорости, которая включает в себя область локализации поперечного резонанса.
Локализация поперечного резонанса определяется системой 3 управления барабаном подъемной лебедки на основе текущей нагрузки грузовой клети 11 и скорости подъемной лебедки. Локализация поперечного резонанса для некоторых положений грузовой клети 11 эквивалентна второму расстоянию d2. Посредством уменьшения первой скорости грузовой клети 11 до второй скорости в зоне уменьшения скорости в результате управления скоростью грузовой клети, локализация поперечного резонанса смещается от положения, определенного системой 3 управления барабаном подъемной лебедки, в смещенную локализацию поперечного резонанса. Под смещенной локализацией поперечного резонанса понимается область локализации поперечного резонанса, в которую переместилась эта локализация поперечного резонанса в результате уменьшения первой скорости. Однако когда грузовая клеть 11 достигнет смещенной локализации поперечного резонанса, резонанс катенарной части не возникнет, поскольку первая скорости в зоне уменьшения скорости уменьшилась.
Система 1 шахтной барабанной подъемной лебедки может содержать двигатель М и блок 15 привода. Система 3 управления барабаном подъемной лебедки может быть выполнена с возможностью управления двигателем М посредством блока 15 привода, чтобы тем самым управлять скоростью наматывания и скоростью разматывания троса 9, то есть скоростью лебедки посредством барабана 5 подъемной лебедки. В результате можно управлять скоростью грузовой клети 11.
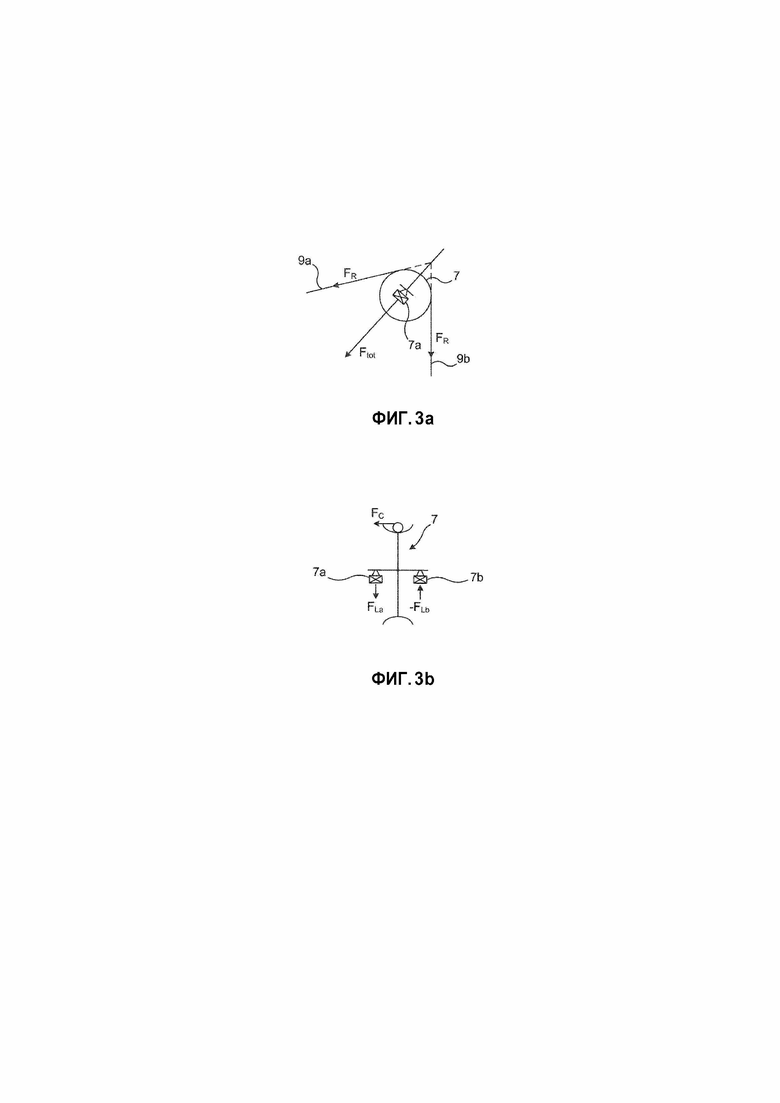
Фиг. 3a схематично показывает вид сбоку головного шкива 7, один из тензодатчиков нагрузки, в этом примере - первый тензодатчик 7a нагрузки, катенарную часть 9а и вертикальный участок 9b троса. Полная сила, то есть, сумма величины Ftot силы, измеренной первым тензодатчиком 7a нагрузки и вторым тензодатчиком 7b нагрузки, представляет собой сумму силы, обусловленной весом головного шкива 7, и векторной суммы силы натяжения троса, то есть, вертикальной составляющей FR и составляющей FR катенарной части, которые представляют собой векторные компоненты, которые имеют разные направления, но оба имеют одинаковую величину FR.
В соответствии с одним вариантом осуществления система 3 управления барабаном подъемной лебедки, выполнена с возможностью определения суммы величины сил посредством сложения значения измерения первой силы FLa со значением измерения второй силы FLb, показанными на фиг. 3b. Система 3 управления барабаном подъемной лебедки в соответствии с одним вариантом осуществления выполнена с возможностью определения текущей нагрузки на основе суммы величины сил Ftot, которая является абсолютной величиной суммирования векторов значения измерения первой силы FLa и значения измерения второй силы FLb. Текущая нагрузка может быть определена вычитанием веса вертикального участка 9b троса, веса грузовой клети 11 и веса головного шкива 7 из суммы величины сил Ftot. Резонансная частота fC катенарной части, в частности, основная резонансная частота, может быть выражена как
fC=(1/2LC) √(FR/mr), (1)
где LC есть длина катенарной части 9а, а mr есть вес троса в единицах масса/ед. длины, то есть, кг/м.
Поперечный резонанс в катенарной части, возникает тогда, когда целое кратное основной частоты fexc толчка троса равно резонансной частоте fC катенарной части. При этом основная частота толчка троса может быть выражена как
fexc=2 v/πD, (2)
где v есть скорость лебедки в метрах в секунду, а D есть диаметр барабана 5 подъемной лебедки.
В том случае, когда на барабан 5 подъемной лебедки намотаны несколько слоев троса, при вычислении основной частоты fexc толчка троса они тоже принимаются во внимание.
Величина натяжения троса может быть выражено как FR=(mc+ml+d3×mr)×g, где mc есть вес грузовой клети 11, а m1 есть текущая нагрузка; третье расстояние d3=d1+d2, а g - ускорение силы тяжести. Таким образом, из соотношения fexc=fC можно вывести, что
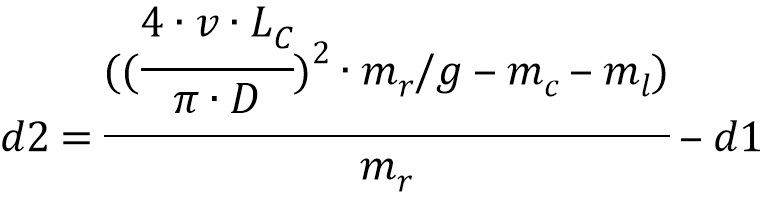 (3)
(3)
Таким образом, исходя из уравнения (3), в соответствии с одним вариантом осуществления система 3 управления барабаном подъемной лебедки может быть выполнена с возможностью определения локализации поперечного резонанса в дополнение к нагрузке и скорости подъемной лебедки на основании резонансной частоты катенарной части 9а, диаметра D барабана 5 подъемной лебедки, частоты импульса в тросе, возникающего на переходных секциях канавок Лебуса, то есть, частоты fexc толчка троса, длины вертикального участка 9b троса от центральной оси головного шкива 7, то есть, от оси А головного шкива до отверстия 13 шахты, то есть, первого расстояния d1, длины катенарной части, веса mc грузовой клети 11 и веса mr троса на единицу длины.
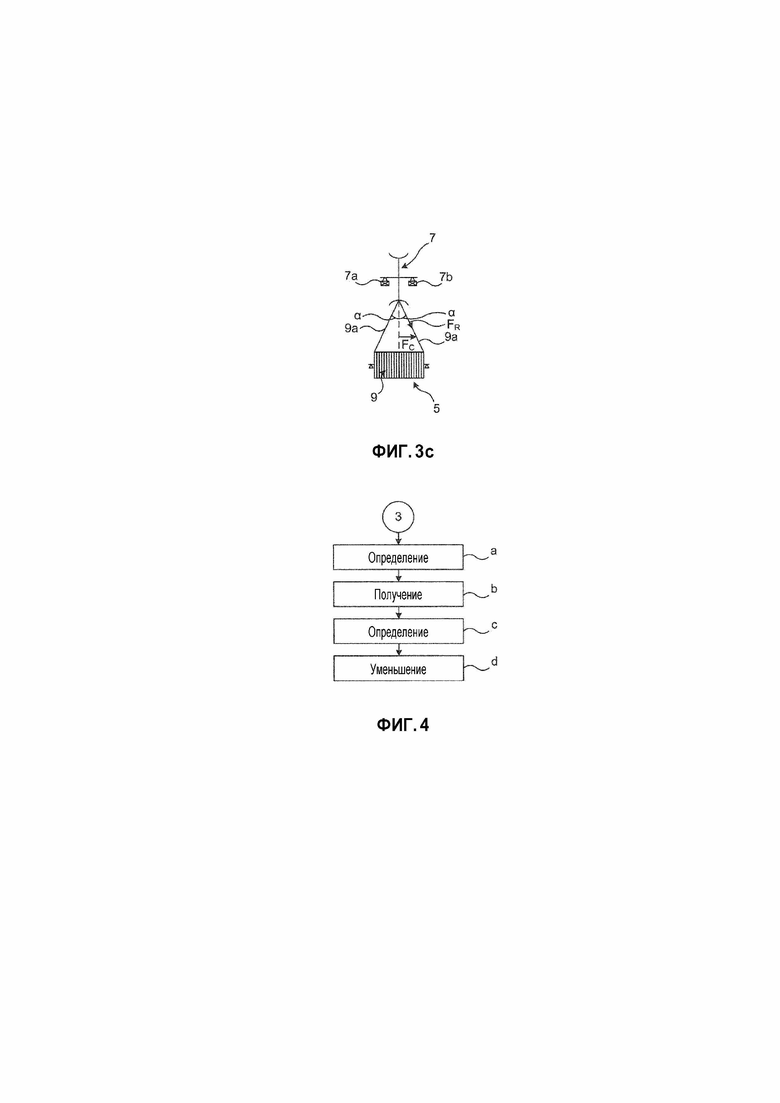
Теперь со ссылкой на фиг. 4 будет описан способ управления поперечным резонансом в катенарной части 9а системы 1 шахтной барабанной подъемной лебедки посредством системы 3 управления барабаном подъемной лебедки.
На этапе а) посредством системы 3а обработки системы 3 управления барабаном подъемной лебедки определяют текущую нагрузку ml грузовой клети 11. Текущая нагрузка может быть, например, определена вышеописанным способом.
Как уже упоминалось ранее, этап а) может включать в себя получение значения измерения первой силы посредством первого тензодатчика 7a нагрузки головного шкива 7 и значения измерения второй силы посредством второго тензодатчика 7b нагрузки головного шкива 7. В этом случае этап а) заключается в определении суммы величины сил суммированием значения измерения первой силы со значением измерения второй силы, при этом текущая нагрузка может быть определена на основании суммы величины сил Ftot. В частности, текущая нагрузка может быть определена вычитанием веса грузовой клети 11, веса вертикального участка 9b троса и головного шкива 7 из суммы величины сил Ftot.
На этапе b) получают скорость v барабана 5 подъемной лебедки. Эта скорость v барабана 5 подъемной лебедки, которая пропорциональна первой скорости грузовой клети 11, может быть пропорциональной требуемой максимальной скорости грузовой клети, то есть, предварительно запрограммированному параметру, или же она может определяться в реальном масштабе времени.
Следует отметить, что для этапов а) и b) не является необходимым их выполнение в вышеуказанном порядке: их порядок может быть взаимозаменяемым.
На этапе с) определяют локализацию поперечного резонанса, которая находится на некотором втором расстоянии d2 вдоль вертикального участка 9b троса. Локализация поперечного резонанса определяется на основании текущей нагрузки m1 и скорости v лебедки. В соответствии с одним вариантом осуществления локализация поперечного резонанса может быть определена с помощью уравнения (3). Альтернативно локализация поперечного резонанса может быть получена из справочной таблицы, в которой хранится множество комбинаций скорости подъемной лебедки и текущей нагрузки.
В соответствии с одним вариантом осуществления на этапе с) определение локализации поперечного резонанса дополнительно может быть выполнено на основании резонансной частоты fC катенарной части, диаметра d барабана 5 подъемной лебедки, частоты fexc импульса в тросе 9, возникающего на переходных секциях канавок 5b Лебуса, длины, то есть, первого расстояния d1 вертикального участка 9b троса от центральной оси, то есть, от оси А головного шкива 7 до отверстия 13 шахты, веса mc грузовой клети, длины 9а катенарной части и веса mr троса на единицу длины.
На этапе d) первую скорость грузовой клети11 уменьшают системой 3 управления барабаном подъемной лебедки посредством уменьшения скорости подъемной лебедки в зоне уменьшения скорости, которая включает в себя область локализации поперечного резонанса. Это уменьшение первой скорости, таким образом, может, например, быть получено системой 3 управления барабаном подъемной лебедки, управляющей блоком 15 привода, который, в свою очередь, управляет двигателем М, приводящим барабан 5 подъемной лебедки.
Зона снижения скорости может быть определена путем извлечения зоны снижения скорости, которая была определена для области локализации поперечного резонанса при выполнении процедуры настройки/калибровки. Во время процедуры настройки зона снижения скорости может быть определена на основании величин силы FC бокового воздействия на катенарную часть, которые пропорциональны разности между значением измерения первой силы FLa, измеренной первым тензодатчиком 7a нагрузки, и значением измерения второй силы FLb, измеренной вторым тензодатчиком 7b нагрузки. Далее эта процедура будет описана более подробно.
При настройке процедуры управления системы 3 управления барабаном подъемной лебедки важно иметь возможность определить соответствующие области локализации поперечного резонанса, чтобы тем самым обеспечить эффективное перемещение оборудования, полезных ископаемых и персонала посредством грузовой клети 11. Так что, прежде чем вводить в эксплуатацию систему 1 шахтной барабанной подъемной лебедки и системы 3 управления барабаном подъемной лебедки, эта система управления барабаном подъемной лебедки должна быть настроена или откалибрована. Процедура настройки будет описана ниже.
Обратимся к фиг. 3c, - эта иллюстрация схематично показывает вид спереди барабана 5 подъемной лебедки, головного шкива 7, первого тензодатчика 7a нагрузки и второго тензодатчика 7b нагрузки. Как можно видеть на фиг. 3c, угол отклонения α между вертикальной центральной осью, определенной головным шкивом 7 и катенарной частью 9а, показан в двух крайних положениях. Этот угол отклонения α зависит от того, как много троса 9 было смотано с барабана 5 подъемной лебедки по мере того, как катенарная часть перемещается между левым и правым положениями вдоль осевого направления барабана 5 подъемной лебедки во время операций сматывания/наматывания.
В соответствии с одним вариантом исполнения система 3 управления барабаном подъемной лебедки, выполнена с возможностью определения величин теоретической силы FC1 бокового воздействия на катенарную часть определением компонента силы FR катенарной части, который представляет собой натяжение троса, посредством значения измерения первой силы FLa первым тензодатчиком 7a нагрузки и значения измерения второй силы FLb вторым тензодатчиком 7b нагрузки, как было описано выше, и умножением натяжения троса на Sinα, то есть, FR×Sinα, где α есть угол отклонения. Теоретическая сила FC1 бокового воздействия, определенная для нескольких вторых расстояний d2, показана на графике на фиг. 5а. Следовательно, процедура настройки использует значение измерения первой силы первым тензодатчиком 7a нагрузки и значение измерения второй силы FLb вторым тензодатчиком 7b нагрузки, выполнявшиеся вдоль всего ствола шахты, в котором грузовая клеть 11 перемещается вертикально. Можно видеть, что по мере того, как грузовая клеть 11 движется вдоль вертикальной оси в стволе шахты, то есть, по мере изменения расстояния d2 теоретическая сила FC1 бокового воздействия на катенарную часть изменяется. В действительности график выглядит в большей степени как пример, показанный на рис. 5b, где обусловленные поперечными толчками силы колебаний катенарной части, которые сильно возрастают при резонансе в катенарной части 9а, наложены на силу FC1 бокового воздействия на катенарную часть. Таким образом получен график с величинами силы FC бокового воздействия на катенарную часть. На графике каждая область с повышенными колебаниями катенарной части, как та, что показана на фиг. 5b, соответствует локализации поперечного резонанса. Каждая величина силы FC бокового воздействия на катенарную часть пропорциональна остатку вычитания значения измерения первой силы FLa из значения измерения второй силы FLb. Таким образом, силы FC бокового воздействия на катенарную часть могут быть определены на основании разности между значением измерения измерением первой силы FLa и значением измерения второй силы FLb в каждой точке измерения.
Показанная на графике по фиг. 5b величина этих сил колебаний катенарной части может использоваться, например, инженером по пуску оборудования, для того чтобы определять, является ли область локализации поперечного резонанса достаточно большой для обоснования снижения скорости грузовой клети, и, таким образом, - следует ли определять зону снижения скорости вокруг такой области локализации поперечного резонанса. С этой целью инженер по пуску оборудования может, например, подсчитать разность между максимальным и минимальным количествами величин7) за определенный период времени. Зона снижения скорости может быть определена также посредством исследования области, в которой возникают локализации поперечного резонанса, то есть, - как далеко до локализации поперечного резонанса и как далеко после локализации поперечного резонанса должна быть определена эта зона снижения скорости. На первом этапе зона снижения скорости может быть, например, определена или получена в результате профессиональной интуиции инженера по пуску оборудования при исследовании им графика типа того, который представлен на фиг. 5b. После этого может быть проведен пробный проход грузовой клети 11 с использованием определенной ранее3) зоны снижения скорости. Затем снова определяют величины сил FC бокового воздействия на катенарную часть - исходя из пропорциональности по отношению к разности между значением измерения первой силы FLa и значением измерения второй силы FLb в каждой точке измерения. В результате, может быть проверено, является ли определенная или интуитивно предположенная зона снижения скорости достаточной для уменьшения или устранения колебаний катенарной части в локализации поперечного резонанса, или же зона снижения скорости должна быть изменена. Эта процедура может итеративно повторяться до тех пор, пока не будет достигнут удовлетворительный результат. Определенная таким образом зона снижения скорости для множества локализаций поперечного резонанса после этого посредством системы 3 управления барабаном подъемной лебедки может быть сохранена. Так что когда спустя какое-то время система 3 управления барабаном подъемной лебедки - с целью управления поперечным резонансом катенарной части - будет определять локализацию поперечного резонанса катенарной части 9а для некоторой нагрузки, как это описано выше, эта система 3 управления барабаном подъемной лебедки может быть выполнена с возможностью определения зоны снижения скорости для этой локализации поперечного резонанса извлечением подходящей зоны снижения скорости для этой локализации поперечного резонанса, полученной во время настройки/калибровки системы.
Кроме того, инженером по пуску оборудования может быть также определена вторая, т.е. пониженная скорость. Таким образом можно производить настройку/калибровку способа управления поперечным резонансом в катенарной части 9а.
Фиг. 5с показывает график, в котором величины по фиг. 5а были вычтены из измеренных величин по фиг. 5b, т.е. FC2=FC-FС1, чтобы получить скорректированные величины сил FС2 бокового воздействия на катенарную часть. Скорректированные величины сил FС2 бокового воздействия на катенарную часть обеспечивают лучший мониторинг настройки, поскольку график продолжается параллельно оси х. При этом максимальные и минимальные пределы могут определяться и отслеживаться более простым способом. В соответствии с одним вариантом система 3 управления барабаном подъемной лебедки выполнена с возможностью определения разности между максимумами и минимумами ряда величин силы FС бокового воздействия на катенарную часть или величин скорректированной силы FС2 бокового воздействия на катенарную часть за определенный период времени.
Выше идея изобретения была описана, в основном, со ссылками на несколько примеров. Однако специалисту в данной области техники будет сразу же понятно, что в рамках объема идеи изобретения, как он определен приложенными пунктами формулы изобретения, в равной степени возможны другие варианты осуществления, отличные от описанных выше.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ ДЛЯ ПРИВОДА ТРОСОВОГО БАРАБАНА ШАХТНОЙ ПОДЪЕМНОЙ МАШИНЫ И ТРОСОВОЙ СИСТЕМЫ | 1991 |
|
RU2072315C1 |
| ЛЕБЕДКА | 2010 |
|
RU2520628C2 |
| ПРИБОР И МЕТОД КОНТРОЛЯ ДИНАМИЧЕСКИХ НАПРЯЖЕНИЙ В МНОГОСЛОЙНОМ ВИТОМ ТРОСЕ И БАРАБАНЕ В СВЕРХГЛУБОКОЙ СКВАЖИНЕ | 2016 |
|
RU2692968C1 |
| Направляющая система | 2014 |
|
RU2669649C2 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ ПОДЪЕМНОГО УСТРОЙСТВА И ПОДЪЕМНАЯ СИСТЕМА | 2007 |
|
RU2429185C2 |
| ПОДЪЕМНАЯ СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ПОДЪЕМНОЙ СИСТЕМОЙ | 2015 |
|
RU2662586C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ КРАНОМ ДЛЯ УПРАВЛЕНИЯ ПОДЪЕМНЫМ МЕХАНИЗМОМ КРАНА | 2010 |
|
RU2534694C2 |
| СНАБЖЕННАЯ БАРАБАННОЙ ЛЕБЕДКОЙ ПОДЪЕМНО-ТРАНСПОРТНАЯ УСТАНОВКА С УСТРОЙСТВОМ КОНТРОЛЯ КАНАТА | 2016 |
|
RU2719509C1 |
| ГИДРОСИСТЕМА СПУСКО-ПОДЪЕМНОГО УСТРОЙСТВА ВОДОЛАЗНОГО КОЛОКОЛА | 2009 |
|
RU2403170C1 |
| ПОДЪЕМНАЯ УСТАНОВКА ДЛЯ ГОРНЫХ РАБОТ | 2003 |
|
RU2236370C1 |
Настоящее изобретение относится к способу управления поперечным резонансом в катенарной части системы (1) шахтной барабанной подъемной лебедки, содержащей барабан (5) подъемной лебедки, имеющий канавки Лебуса, головной шкив (7), трос (9), имеющий катенарную часть (9a), продолжающуюся между барабаном (5) подъемной лебедки и головным шкивом (7), и вертикальный участок (9b) троса, а также грузовую клеть (11), прикрепленную к вертикальному участку (9b) троса. Способ включает в себя а) определение текущей нагрузки грузовой клети (11), b) получение скорости подъемной лебедки барабана (5) подъемной лебедки, соответствующей первой скорости грузовой клети (11), c) определение локализации поперечного резонанса вдоль вертикального участка (9b) троса, в котором в катенарной части (9a), когда оно достигнуто грузовой клетью (11) с текущей нагрузкой и на первой скорости, возникает поперечный резонанс, при этом локализация поперечного резонанса определяется на основании текущей нагрузки и на основании скорости подъемной лебедки, и d) уменьшение первой скорости грузовой клети в зоне уменьшения скорости, которая включает в себя локализацию поперечного резонанса. Это изобретение к системе (3) управления барабаном подъемной лебедки и к системе (1) шахтной барабанной подъемной лебедки. 3 н. и 11 з.п. ф-лы, 9 ил.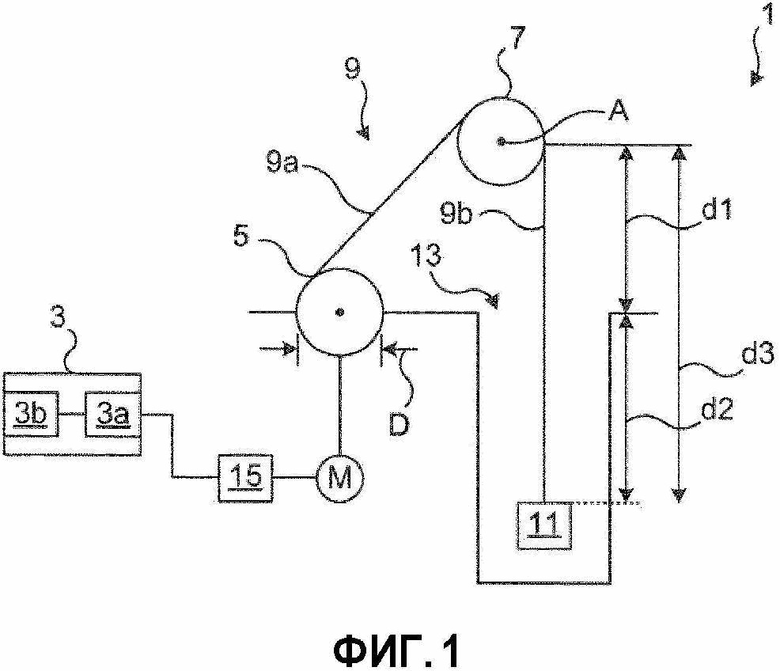
1. Способ управления поперечным резонансом в катенарной части (9a) системы (1) шахтной барабанной подъемной лебедки, содержащей барабан (5) лебедки, имеющий канавки (5b) Лебуса, головной шкив (7), трос (9), имеющий катенарную часть (9a), проходящую между барабаном (5) подъемной лебедки и головным шкивом (7), и вертикальный участок (9b) троса, а также подъемное средство (11), прикрепленное к вертикальному участку (9b) троса, причем способ включает в себя
а) определение текущей нагрузки подъемного средства (11),
b) получение скорости подъемной лебедки барабана (5) подъемной лебедки, соответствующей первой скорости подъёмного средства (11),
c) определение локализации поперечного резонанса вдоль вертикального участка (9b) троса, в котором генерируется поперечный резонанс в катенарной части (9a), когда её достигает подъемное средство (11) с текущей нагрузкой и на первой скорости, причем локализация поперечного резонанса определяется на основании текущей нагрузки и скорости подъемной лебедки, и
d) уменьшение первой скорости подъемного средства (11) в зоне уменьшения скорости, которая включает в себя локализацию поперечного резонанса.
2. Способ по п. 1, включающий в себя получение значения измерения первой силы (FLa) от первого тензодатчика (7a) нагрузки головного шкива (7) и значения измерения второй силы (FLb) от второго тензодатчика (7b) нагрузки головного шкива (7), при этом этап а) включает в себя определение суммы величины сил сложением значения измерения первой силы со значением измерения второй силы и при этом текущая нагрузка определяется на основании суммы величины сил.
3. Способ по п. 2, в котором текущая нагрузка определяется вычитанием веса вертикального участка (9b) троса, веса подъемного средства (11) и веса головного шкива (7) из суммы величины сил.
4. Способ по любому из предшествующих пунктов, в котором на этапе с) определение локализации поперечного резонанса дополнительно основано на резонансной частоте катенарной части (9a), диаметре (D) барабана (5) подъемной лебедки, частоте импульса в тросе (9), возникающего на переходах канавок (9b) Лебуса, длине вертикального участка (9b) троса от центральной оси (А) головного шкива (7) до отверстия (13) ствола шахты, весе подъёмного средства (11), весе троса на единицу длины и длине катенарной части (9a).
5. Способ по любому из пп. 1-3, в котором на этапе с) локализацию поперечного резонанса получают из справочной таблицы, которая содержит предварительно вычисленные локализации поперечного резонанса для множества комбинаций различных текущих нагрузок и скорости подъемной лебедки.
6. Способ по любому из предшествующих пунктов, в котором этап d) уменьшения первой скорости подъёмного средства (11) включает в себя уменьшение скорости подъемной лебедки.
7. Способ по любому из предшествующих пунктов, включающий в себя определение зоны снижения скорости на основе скорости подъемной лебедки, полученной на этапе b), при этом определение зоны снижения скорости включает в себя извлечение зоны снижения скорости, которая была определена для локализации поперечного резонанса и которая была определена на основе величин силы (FC) бокового воздействия на катенарную часть, которые пропорциональны разности между значением измерения первой силы (FLa,), измеренной первым тензодатчиком (7a) нагрузки, и значением измерения второй силы (FLb), измеренной вторым тензодатчиком (7b) нагрузки.
8. Система (3) управления барабаном подъемной лебедки, выполненная с возможностью управления поперечным резонансом в катенарной части системы (1) шахтной барабанной подъемной лебедки, содержащей барабан (5) подъемной лебедки, имеющий канавки (5b) Лебуса, головной шкив (7), трос (9), имеющий катенарную часть (9a), проходящую между барабаном (5) подъемной лебедки и головным шкивом (7), и вертикальный участок (9b) троса, а также подъёмное средство (11), прикрепленное к вертикальному участку (9b) троса, причем система (3) управления барабаном подъемной лебедки содержит
- запоминающий блок (3b) и
- систему (3а) обработки,
при этом запоминающий блок (3b) содержит исполнимые на компьютере компоненты, которые, будучи исполняемыми системой (3а) обработки, вынуждают систему (3) управления барабаном подъемной лебедки:
- определять текущую нагрузку подъёмного средства (11),
- получать скорость лебедки барабана (5) подъемной лебедки, соответствующую первой скорости подъёмного средства (11),
- определять локализацию поперечного резонанса вдоль вертикального участка (9b) троса (9), к которому прикреплено подъёмное средство (11) и в котором генерируется поперечный резонанс в катенарной части (9a), когда ее достигает подъемное средство (11) с текущей нагрузкой и на первой скорости, при этом локализация поперечного резонанса определяется на основании текущей нагрузки и на основании скорости подъемной лебедки, и
- уменьшать первую скорость подъёмного средства (11) в зоне уменьшения скорости, которая включает в себя локализацию поперечного резонанса.
9. Система (3) управления барабаном подъемной лебедки по п. 8, в которой система (3а) обработки выполнена с возможностью приёма значения измерения первой силы (FLa,) от первого тензодатчика (7a) нагрузки головного шкива (7) и значения измерения второй силы (FLb) от второго тензодатчика (7b) нагрузки головного шкива 7, причем система (3а) обработки выполнена с возможностью определения суммы величины сил сложением значения измерения первой силы со значения измерения второй силы и причем система (3а) обработки выполнена с возможностью определения текущей нагрузки на основе этой суммы величины сил.
10. Система (3) управления барабаном подъемной лебедки по п. 8, в которой система (3а) обработки выполнена с возможностью определения текущей нагрузки вычитанием веса вертикального участка (9b) троса, веса подъёмного средства (11) и веса головного шкива (7) из суммы величины сил.
11. Система (3) управления барабаном подъемной лебедки по пп. 8-10, в которой система (3а) обработки выполнена с возможностью определения локализации поперечного резонанса на основе резонансной частоты катенарной части (9a), диаметра (D) барабана подъемной лебедки, частоты импульса в тросе, возникающего на переходах канавок Лебуса барабана подъемной лебедки, длины вертикального участка (9b) троса от центральной оси (А) головного шкива (7) до отверстия (13) шахты, веса подъёмного средства (11), веса троса на единицу длины и длины катенарной части (9a).
12. Система (3) управления барабаном подъемной лебедки по пп. 8-10, в которой система (3а) обработки выполнена с возможностью получения локализации поперечного резонанса из справочной таблицы, которая содержит предварительно вычисленные локализации поперечного резонанса для множества комбинаций различных текущих нагрузок и скорости подъемной лебедки.
13. Система (3) управления барабаном подъемной лебедки по пп. 8-10, в которой система (3а) обработки выполнена с возможностью определения зоны снижения скорости на основе скорости подъемной лебедки, причем система (3а) обработки выполнена с возможностью определения зоны снижения скорости извлечением зоны снижения скорости, которая была определена для локализации поперечного резонанса и которая была определена на основе величин силы бокового воздействия на катенарную часть, которые пропорциональны разности между значением измерения первой силы, измеренной первым тензодатчиком нагрузки, и значением измерения второй силы, измеренной вторым тензодатчиком нагрузки.
14. Система (1) шахтной барабанной подъемной лебедки, содержащая
- барабан (5) подъемной лебедки, имеющий канавки (5b) Лебуса,
- головной шкив (7),
- трос (9), выполненный с возможностью прохождения между барабаном (5) подъемной лебедки и головным шкивом (7), тем самым определяя катенарную часть (9a) и вертикальный участок (9b) троса,
- подъёмное средство (11), выполненное с возможностью прикрепления к вертикальному участку (9b) троса,
- двигатель (М), выполненный с возможностью управления барабаном (5) подъемной лебедки, и
- систему (3) управления барабаном подъемной лебедки по любому из пп 8-13, выполненную с возможностью управления двигателем (М).
| Гидравлический распределитель | 1982 |
|
SU1138552A1 |
| JP 2013124176 A, 24 | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Способ создания инертной средыВ ТупиКОВОй ВыРАбОТКЕ | 1979 |
|
SU796461A1 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ ДЛЯ ПРИВОДА ТРОСОВОГО БАРАБАНА ШАХТНОЙ ПОДЪЕМНОЙ МАШИНЫ И ТРОСОВОЙ СИСТЕМЫ | 1991 |
|
RU2072315C1 |

