ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится к способу управления подъемной системой и подъемной системе, и конкретно относится к способу управления подъемной системой и подъемной системе для загрузки и разгрузки подъемника, такого как клеть, используемого в шахтном стволе.
УРОВЕНЬ ТЕХНИКИ
[0002] Шахтный подъем широко используется в горнорудном производстве. Когда шахтный ствол становится глубже, трос (такой как стальной трос), который тянет подъемник, становится более длинным и ведет себя как упругое тело с большой упругостью. В большинстве случаев возникает значительное растяжение троса из-за подвешенного груза. Эта особенность не позволяет точно остановить подъемник (такой как клеть или скип), когда подъемник достигает глубокого рабочего горизонта. Особенно, трос будет сильно деформирован, когда на подъемнике находится тяжелый груз, приводя к перемещениям вверх и вниз и колебанием влево и вправо подъемника, и таким образом создавая сложности в обеспечении безопасной работы.
[0003] До настоящего времени, различные клетевые подъемные системы, использующиеся во вспомогательном шахтном стволе, содержат главным образом систему приведения в движение и систему стабилизации клети. В процессе загрузки и разгрузки подъемника обычные способы управления могут быть разделены на два типа согласно принципу их работы: один состоит в фиксации подъемника посредством верхнего и нижнего фиксирующих рычагов, которые могут быть выдвинуты посредством гидравлической рабочей станции; другой состоит в избыточном опускании троса, и затем толкании подъемника снизу посредством гидравлической рабочей станции. Оба способа управления используют отдельные систему приведения в движение и систему стабилизации клети, и таким образом требуют частой работы подъемника и гидравлической рабочей станции соответственно. Это уменьшает эффективность работы подъемной системы и накладывает высокие требования на механическую прочность верхнего и нижнего фиксирующих рычагов и производительность гидравлической рабочей станции, что увеличивает стоимость системы без эффективного повышения устойчивости и безопасности системы. Кроме того, среди этих способов, величина деформации (удлинения) стального троса не контролируется или не оптимизируется, приводя к тому, что величина деформации всегда остается большой или так же эффективно не контролируется. Это сократит срок службы стального троса и при этом уменьшит безопасность подъемной системы. Такая же проблема также существует для скиповой подъемной системы в главном шахтном стволе.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0004] Задача настоящего изобретения состоит в преодолении недостатков в предшествующем уровне техники посредством обеспечения способа управление подъемной системой и подъемной системы, в которых система управления и поддерживающее устройство взаимодействуют друг с другом, чтобы автоматически отрегулировать крутящий момент двигателя, так чтобы эффективность работы подъемной система и срок службы троса были улучшены, и безопасность процесса подъема была обеспечена.
[0005] Для достижения вышеописанной задачи, настоящее изобретение обеспечивает следующие технические решения.
[0006] Способ управления подъемной системой, подъемная система содержит подъемный двигатель для подъема подъемника и поддерживающее устройство для поддерживания подъемника, когда подъемник достигает заданного положения; способ отличается тем, что, когда подъемник перемещается вниз к поддерживающему устройству и затем поддерживается (посадочным устройством и/или путем фиксации) посредством поддерживающего устройства, подъемная сила (и соответственно крутящий момент) подъемного двигателя регулируется до заданного значения.
[0007] В варианте выполнения поддерживающее устройство содержит посадочное устройство для посадки подъемника и фиксирующее устройство для фиксации подъемника; способ отличается тем, что он дополнительно содержит следующие этапы: когда подъемник опирается на посадочное устройство, фиксирующее устройство фиксирует подъемник.
[0008] В варианте выполнения заданное значение для подъемной силы превышает нулевое значение, но меньше собственного веса подъемника. Заданное значение является специфическим для каждого случая и вычисляется таким, чтобы иметь безопасный запас на проскальзывание троса.
[0009] В варианте выполнения заданное значение для подъемной силы лежит в диапазоне от 50% до 80% собственного веса подъемника.
[0010] Здесь также обеспечена подъемная система, отличающаяся тем, что она может выполнить любой из способов, как указано выше.
[0011] В варианте выполнения поддерживающее устройство содержит по меньшей мере четыре группы соединительных штоковых механизмов, симметрично расположенных относительно шахтного ствола, каждая группа соединительного штокового механизма содержит посадочный соединительный шток для клети, посадочный плунжер для клети и посадочный элемент для соединительного штока; как поддерживающий конец посадочного соединительного штока для клети, так и посадочный плунжер для клети установлены на посадочный элемент соединительного штока, который подлежит креплению к стенке шахтного ствола; в котором посадочный плунжер для клети соединен с посадочным соединительным штоком для клети и выполнен с возможностью складывания для перемещения посадочного соединительного штока для клети из шахтного ствола или в шахтный ствол.
[0012] В варианте выполнения каждая группа механизма соединительного штока поддерживающего устройства дополнительно содержит фиксирующий соединительный шток для клети и фиксирующий плунжер для клети, как поддерживающий конец фиксирующего соединительного штока для клети, так и фиксирующий плунжер для клети установлены на посадочном элементе соединительного штока, в котором фиксирующий плунжер для клети соединен с фиксирующим соединительным штоком для клети и выполнен с возможностью складывания для фиксации или расфиксации подъемника при помощи фиксирующего соединительного штока для клети.
[0013] В варианте выполнения, подъемная система дополнительно содержит шкаф управления подъемом и шкаф управления стабилизацией клети; шкаф управления стабилизацией клети может сообщаться со шкафом управления подъемом, чтобы обеспечить взаимодействие между поддерживающим устройством и подъемным двигателем во время процесса размещения клети и освобождения клети.
[0014] В варианте выполнения, подъемная система дополнительно содержит гидравлическую рабочую станцию стабилизации клети и местный пульт управления; шкаф управления стабилизацией клети может сообщаться с местным пультом управления для управления гидравлической рабочей станцией стабилизации клети и поддерживающим устройством и обеспечения обратной связи по положению платформы, на которой останавливается подъемник.
[0015] Согласно заявленному изобретению, способ управление подъемной системой и подъемная система, с одной стороны, снижают требования к прочности поддерживающего устройства и к гидравлической фиксирующей системе, и следовательно, значительно уменьшают стоимость, связанную с поддерживающим устройством; с другой стороны, сложные процессы, такие как измерение натяжения и процессы выравнивания положения во время размещения клети и освобождения клети, могут быть упрощены, нагрузка на трос может эффективно контролироваться и оптимизироваться, и таким образом эффективность работы подъемника может быть улучшена, и срок службы троса может быть увеличен.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
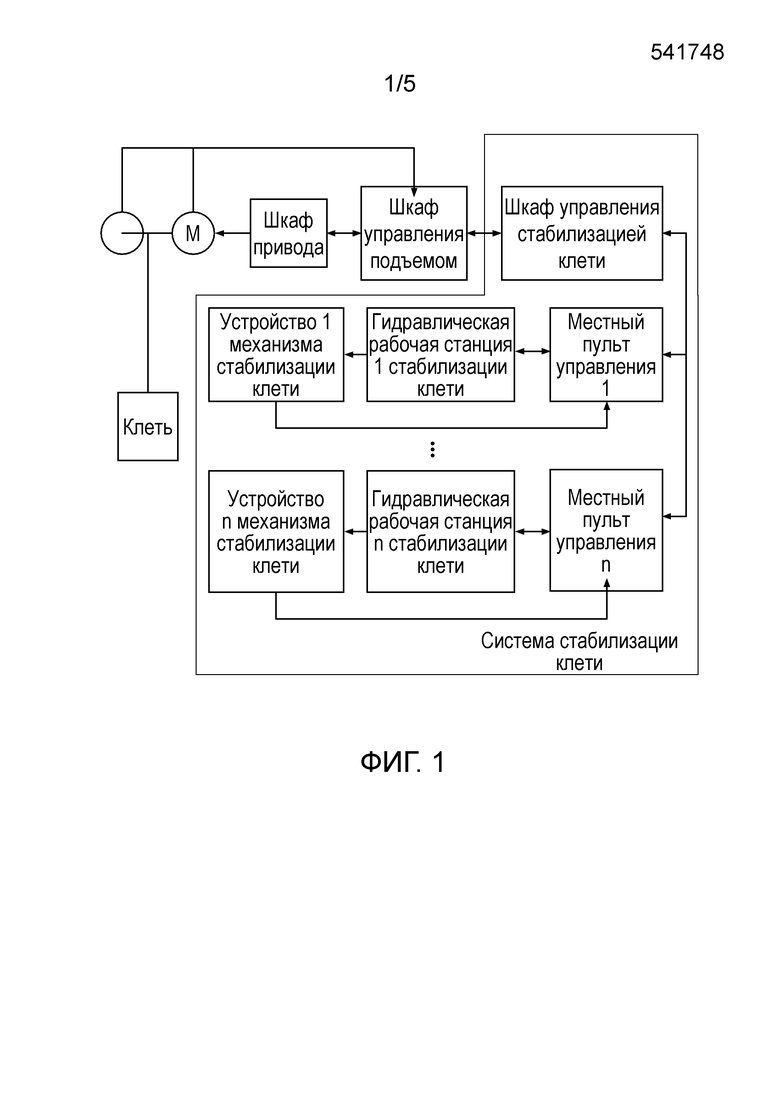
[0016] Фигура 1 изображает топологическую структуру подъемной системы, используемой для клети;
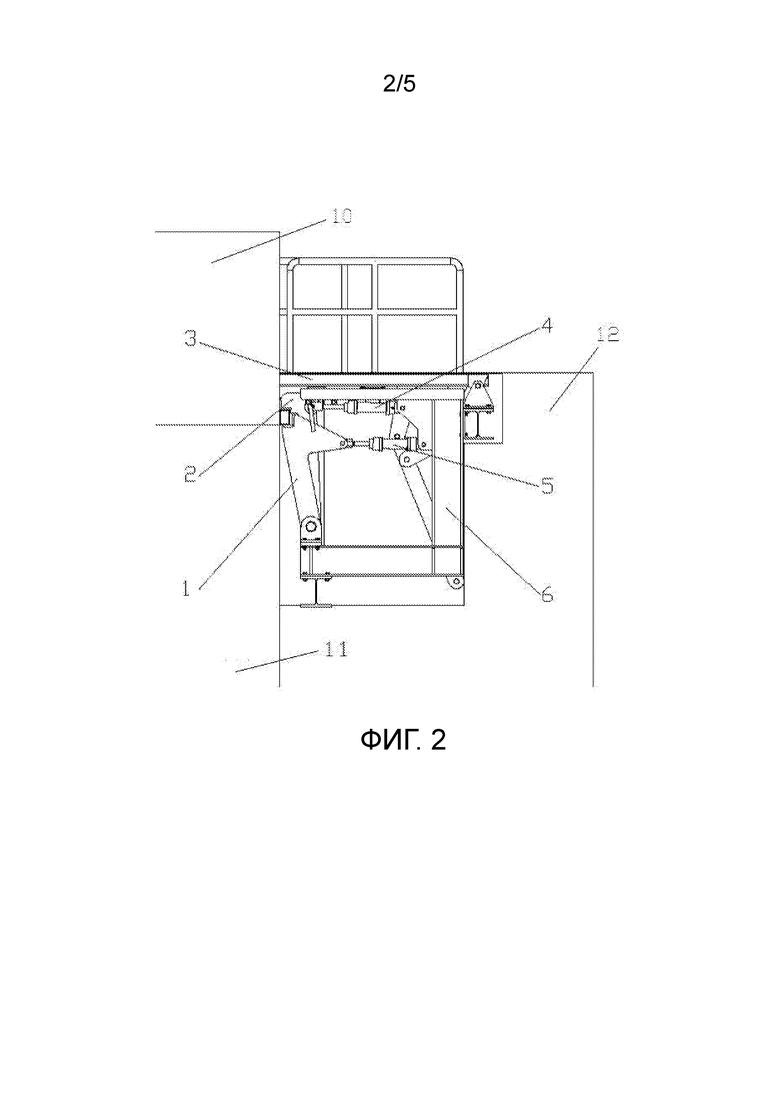
[0017] Фигура 2 изображает структурную схему поддерживающего устройства;
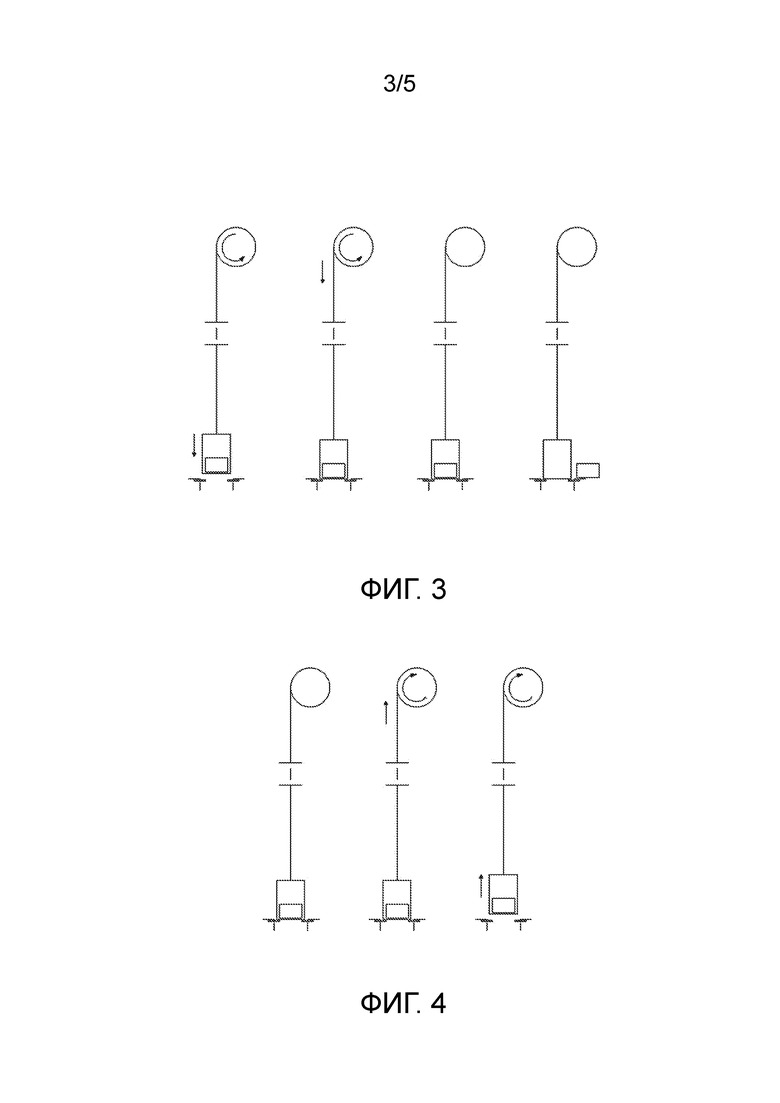
[0018] Фигура 3 изображает схематичный чертеж, показывающий процесс размещения клети, перемещающейся вниз;
[0019] Фигура 4 изображает схематичный чертеж, показывающий процесс освобождения клети посредством перемещения вверх;
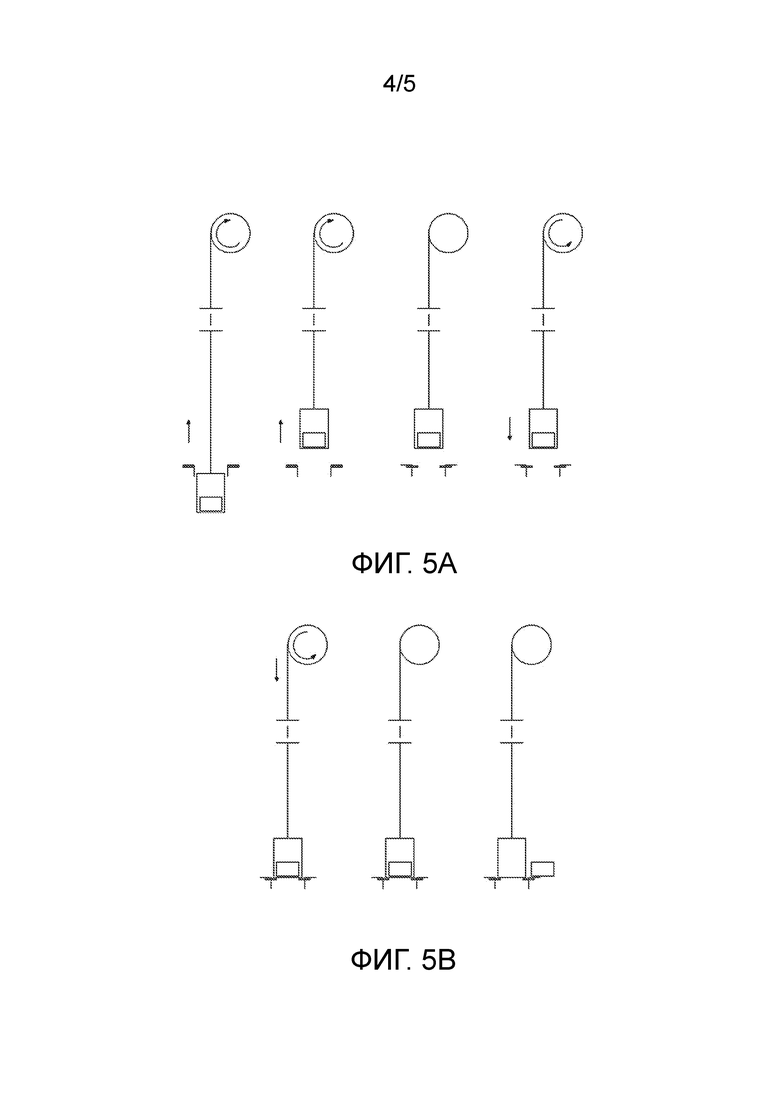
[0020] Фигуры 5A и 5B изображают схематичный чертеж, показывающий процесс размещения клети, перемещающейся вверх; и
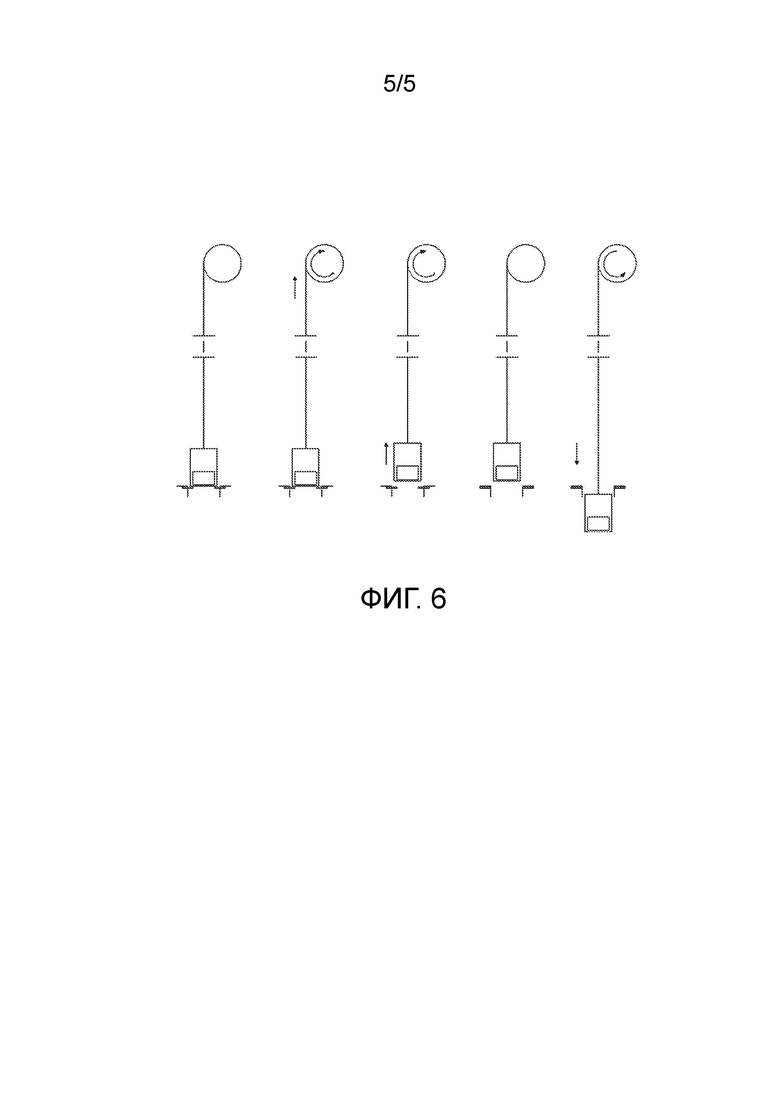
[0021] Фигура 6 изображает схематичный чертеж, показывающий процесс освобождения клети посредством перемещения вниз.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ВЫПОЛНЕНИЯ
[0022] Далее будет приведено подробное описание различных вариантов выполнения настоящего изобретения со ссылкой на чертежи. Заявленная система и способ управления могут быть использованы для подъема скипа в главном шахтном стволе, а также для подъема клети во вспомогательном шахтном стволе; однако, поскольку система управления и способ по существу одинаковы для подъема клети и подъема скипа, для простоты, далее будет описан только подъем клети во вспомогательном шахтном стволе в качестве примера.
[0023] Как показано на Фигуре 1, подъемная система содержит n гидравлических рабочих станций стабилизации клети, n поддерживающих устройств, n местных пультов управления и шкаф управления стабилизацией клети, где ʺnʺ обозначает количество всех платформ шахтного ствола для горизонтальной загрузки и разгрузки.
[0024] В подъемной системе, гидравлическая рабочая станция стабилизации клети обеспечивает источник приведения в движение поддерживающего устройства, и состоит из резервуара для масла, насоса для масла, регулировочных клапанов и труб. Она обеспечивает надлежащее воздействие на соответствующий гидравлический плунжер и соединительный шток поддерживающего устройства и при этом обеспечивает обратную связь по состоянию системы управления.
[0025] Механическое устройство стабилизации клети (далее называемое поддерживающее устройство) является устройством для посадки и фиксации клети. Каждое поддерживающее устройство состоит из по меньшей мере четырех идентичных конструкций соединительного штока, и каждая конструкция соединительного штока главным образом состоит из посадочного соединительного штока для клети, фиксирующего соединительного штока для клети, посадочного плунжера для клети, фиксирующего плунжера для клети и посадочного элемента соединительного штока. Посадочный соединительный шток для клети передает нагрузку клети на стенку шахтного ствола через посадочный элемент соединительного штока, фиксирующий соединительный шток для клети взаимодействует с посадочным соединительным штоком для клети для фиксации клети, посадочный плунжер для клети выполнен с возможностью складывания для перемещения посадочного соединительного штока для клети в положение посадки клети или в убранное положение, и фиксирующий плунжер для клети выполнен с возможностью складывания для перемещения фиксирующего соединительного штока для клети в фиксирующее положение или расфиксирующее положение.
[0026] Местный пульт управления может выдавать рабочую команду гидравлической рабочей станции стабилизации клети и поддерживающему устройству и обеспечивать обратную связь по состоянию. На пульте управления имеются рабочие кнопки и световые индикаторы. Внутренне пульт управления использует подстанционный модуль связи Profibus-DP и модуль ввода/вывода для сообщения со шкафом управления стабилизацией клети.
[0027] Шкаф управления стабилизацией клети, выступающий в качестве центра управления системой стабилизации клети, использует Profibus-DP для сообщения с n местными пультами управления, и, следовательно, согласно положению платформы, на которой клеть остановилась, управляет гидравлической рабочей станцией стабилизации клети и поддерживающим устройством для стабилизации клети и обеспечивает обратную связь по состоянию. При этом, шкаф управления стабилизацией клети сообщается с системами управления подъемными приводами посредством Module-Bus, чтобы совместно управлять процессом стабилизации клети и процессом подъема, так чтобы процесс размещения и освобождения клети мог быть надежно обеспечен.
[0028] Фигура 2 показывает схематичный чертеж, показывающий взаимодействие группы конструкций соединительного штока поддерживающего устройства, клети 10 и шахтного ствола 11. На фигуре, поддерживающие концы посадочного соединительного штока 1 для клети и фиксирующего соединительного штока 2 для клети установлены на одну и ту же шарнирную стойку, и посадочный соединительный шток 1 для клети и фиксирующий соединительный шток 2 для клети приводятся в действие посредством посадочного плунжера 5 для клети и фиксирующего плунжера 4 для клети соответственно, чтобы выполнять действия по посадке клети и фиксации клети. Шарнирные стойки посадочного плунжера 5 для клети и фиксирующего плунжера 4 для клети и общая шарнирная стойка посадочного соединительного штока 1 для клети и фиксирующего соединительного штока 2 для клети установлены на посадочном элементе 6 соединительного штока, который неподвижно установлен на стенке 12 шахтного ствола. Рама 3, в качестве устройства платформы, может быть включена в состав опционально. Посадочный конец посадочного соединительного штока 1 для клети и фиксирующий конец фиксирующего соединительного штока 2 для клети соответственно снабжены пазами, приспособленными к краю клети, для посадки и фиксации клети.
[0029] Поддерживающее устройство может быть обеспечено на различных погрузочных платформах для поддерживания клети, когда она достигает требуемых положений. Поддерживающее устройство может быть всегда выдвинуто к проводнику клети, готовым для использования, например, когда поддерживающее устройство расположено в нижней части проводника клети; или поддерживающее устройство может обычно находиться в убранном положении и выдвигаться в проводник клети только, когда требуется для использования.
[0030] Способ управление подъемной системой касается процесса размещения клети и процесса освобождения клети. Поскольку в настоящем изобретении осуществляется посадка клети, подлежащей позиционированию, процесс размещения клети использует верхнее размещение, то есть, клеть медленно устанавливается в местоположение сверху посадочного соединительного штока для клети; в то время как процесс освобождения клети использует верхнее освобождение, то есть, клеть медленно перемещается из своего положения сверху посадочного соединительного штока для клети. Далее описаны обе ситуации, когда размещается клеть, перемещаемая вниз из положения, расположенного выше погрузочной платформы, и когда размещается клеть, перемещаемая вверх из положения, расположенного ниже погрузочной платформы.
[0031] (1) Размещается клеть, перемещаемая вниз из положения, расположенного выше погрузочной платформы:
[0032] Как показано на Фигуре 3, предполагается, что система создает нагрузку 11 тонн, подъемник имеет вес 10 тонн, и общий вес составляет 21 тонну. Когда клеть перемещается вниз и приближается к поддерживающему устройству, скорость клети снижается до 0,1 м/с, и шкаф управления стабилизацией клети посылает рабочую команду на стабилизацию клети. Посадочный плунжер для клети выдвигается, чтобы толкать посадочный соединительный шток для клети из шахтного ствола и в проводник клети, чтобы быть готовым к посадке клети. Как только клеть размещена, фиксирующий плунжер выдвигается, чтобы вытолкнуть фиксирующий соединительный шток для клети, чтобы взаимодействовать с посадочным соединительным штоком для клети для фиксации и крепления клети одновременно сверху и снизу. После размещения, шкаф управления стабилизацией клети посылает сигнал шкафу управления подъемом, и шкаф управления подъемом автоматически регулирует крутящий момент подъемного двигателя до значения, требуемого для веса 8 тонн, то есть, до крутящего момента, требуемого для веса, который составляет 80% собственного веса клети, так чтобы сила натяжения стального троса уменьшилась с 21 тонны до значения, меньшего чем вес клети. Таким образом, в последующем процессе освобождения клети, чрезмерно большая сила не будет действовать на стальной трос и подъемный двигатель, которая в противном случае будет действовать в момент начала подъема вследствие ненатянутости стального троса. При этом, также может быть исключена ситуация, в которой вследствие ненадлежащего регулирования клеть становится неустойчивой или непредвиденно ускоряется вверх в момент начала подъема, которая ситуация повредит систему и будет опасной. Кроме того, посредством регулирования силы натяжения стального троса до меньшего чем собственный вес клети может быть обеспечено то, что клеть не будет подпрыгивать в большом диапазоне по положению после разгрузки груза из клети. Следует понимать, что предыдущие числа используются только из предположения и для цели приведения примера и не ограничивают заявленное изобретение. Что касается регулирования величины силы натяжения стального троса после размещения, она может быть смоделирована и оптимизирована согласно характеристикам стального троса, диапазону часто используемой нагрузки, частоте использования и так далее, для того чтобы улучшить срок службы стального троса, в то же время обеспечивая безопасность и устойчивость. В предпочтительном варианте выполнения, после размещения, крутящий момент подъемного двигателя регулируется до крутящего момента, требуемого для веса от 50% до 80% собственного веса клети, то есть, подъемная сила подъемного двигателя составляет от 50% до 80% собственного веса клети.
[0033] Фигура 4 показывает процесс освобождения после размещения клети, перемещающейся вниз. Шкаф управления подъемом посылает команду на перемещение вверх, затем шкаф управления стабилизацией клети незамедлительно посылает команду на расфиксацию, фиксирующий плунжер для клети сжимается и отводит фиксирующий соединительный шток для клети, чтобы расфиксировать клеть. Затем шкаф управления подъемом посылает стартовый сигнал. Поскольку стальной трос сохраняет натяжение в 8 тонн, когда подъемный двигатель остановлен, тогда натяжение в 8 тонн будет использовано в качестве заданного крутящего момента в процессе старта и тогда подъемный крутящий момент может быть постепенно увеличен, так чтобы возможное обратное вращение вследствие чрезмерно свободного стального троса могло быть исключено. Затем клеть покидает посадочное устройство для клети, и посадочный плунжер для клети сжимается, чтобы отвести посадочный соединительный шток для клети из проводника клети, и процесс освобождения заканчивается.
[0034] (2) Размещается клеть, перемещающаяся вверх из положения, расположенного ниже погрузочной платформы.
[0035] Как показано на Фигурах 5A и 5B, во время процесса размещения клети, перемещающейся вверх, когда клеть приближается к поддерживающему устройству, шкаф управления подъемом снижает скорость клети до 0,1 м/с, на этой скорости клеть продолжает перемещаться вверх в положение, расположенное выше поддерживающего устройства, и затем шкаф управления подъемом посылает команду на остановку. Затем шкаф управления стабилизацией клети посылает рабочую команду на стабилизацию клети, и посадочный плунжер для клети выдвигается, чтобы толкать посадочный соединительный шток для клети из шахтного ствола в проводник клети, чтобы быть готовым к посадке клети. Шкаф управления подъемом заставляет клеть изменить направление скорости клети и постепенно перемещаться вниз для размещения. После размещения, процессы фиксации клети, остановки и регулирования крутящего момента подъемного двигателя (то есть, регулирование натяжения троса) будут аналогичны процессам при размещении клети, перемещающейся вниз, как описано выше.
[0036] Как показано на Фигуре 6, в процессе освобождения клети после размещения клети, перемещающейся вверх, шкаф управления подъемом посылает команду на перемещение вниз, и затем шкаф управления стабилизацией клети незамедлительно посылает команду на расфиксацию, так чтобы фиксирующий плунжер для клети сжался и отвел фиксирующий соединительный шток для клети для расфиксации клети. Затем шкаф управления подъемом изменяет направление скорости и заставляет клеть перемещаться вверх с меньшей скоростью в течение короткого промежутка времени и затем остановиться. Посадочный плунжер для клети сжимается, чтобы отвести посадочный соединительный шток для клети из проводника клети, и затем шкаф управления подъемом запускает двигатель для опускания клети.
[0037] Во время размещения клети, перемещающейся вверх, и ее освобождения, шкафу управления подъемом требуется изменить заданное направление скорости клети, так что системе приходиться временно обойти защиту от изменения направления подъема и защиту направления движения подъема.
[0038] Хотя вышеприведенное описание выполнено с использованием стального троса, в качестве примера, ясно, что заявленное изобретение не ограничено случаем, когда используется стальной трос, взамен любой другой доступный трос или кабель также возможен.
[0039] Хотя заявленное изобретение описано со ссылкой на некоторые предпочтительные варианты выполнения, специалистам в данной области техники будет понятно, что различные модификации формальных сторон или деталей возможны без отступления от сущности и объема защиты, как определено прилагаемыми пунктами формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДЪЕМНАЯ ПЛАТФОРМА ШАХТНОГО ПОДЪЕМНИКА И СПОСОБ ПОДЪЕМА | 2013 |
|
RU2581788C1 |
| ШАХТНЫЙ ПОДЪЕМНИК | 2011 |
|
RU2585132C2 |
| УСТРОЙСТВО И СПОСОБ АВТОМАТИЧЕСКОЙ РЕГУЛИРОВКИ НАТЯЖЕНИЯ ГИБКОЙ НАПРАВЛЯЮЩЕЙ ШАХТНОГО ПОДЪЕМНИКА | 2011 |
|
RU2539437C2 |
| ПОДЪЁМНОЕ УСТРОЙСТВО ДЛЯ ВЕРТИКАЛЬНОГО ШАХТНОГО СТВОЛА, ПОДЪЁМНАЯ СИСТЕМА ДЛЯ ВЕРТИКАЛЬНОГО ШАХТНОГО СТВОЛА И СПОСОБ УПРАВЛЕНИЯ | 2018 |
|
RU2775288C1 |
| Направляющая система | 2014 |
|
RU2669649C2 |
| МЕТОД ОЦЕНКИ НАДЕЖНОСТИ ПОДЪЕМНОЙ СИСТЕМЫ ШАХТНОГО СТВОЛА С ПОДЪЕМНИКОМ В КИЛОМЕТРОВЫХ ШАХТАХ | 2017 |
|
RU2682821C1 |
| ПРИБОР И МЕТОД КОНТРОЛЯ ДИНАМИЧЕСКИХ НАПРЯЖЕНИЙ В МНОГОСЛОЙНОМ ВИТОМ ТРОСЕ И БАРАБАНЕ В СВЕРХГЛУБОКОЙ СКВАЖИНЕ | 2016 |
|
RU2692968C1 |
| ПНЕВМАТИЧЕСКИЙ ПОДЪЕМНИК | 2005 |
|
RU2317243C9 |
| СИСТЕМА ПУСКА РАКЕТ И ВСПОМОГАТЕЛЬНАЯ АППАРАТУРА | 2011 |
|
RU2551047C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОПЕРЕЧНЫМ РЕЗОНАНСОМ В КАТЕНАРНОЙ ЧАСТИ, СИСТЕМА УПРАВЛЕНИЯ БАРАБАНОМ ПОДЪЕМНОЙ ЛЕБЕДКИ И СИСТЕМА ШАХТНОЙ БАРАБАННОЙ ПОДЪЕМНОЙ ЛЕБЕДКИ | 2015 |
|
RU2695755C2 |
Заявленное изобретение обеспечивает способ управления подъемной системой, которая содержит подъемный двигатель для подъема подъемника и поддерживающее устройство для поддерживания подъемника. При осуществлении способа подъемник достигает заданного положения при перемещении вниз к поддерживающему устройству и затем поддерживается посредством поддерживающего устройства, при этом подъемная сила подъемного двигателя регулируется до заданного значения, которое превышает нулевое значение, но меньше собственного веса подъемника. Заявленное изобретение также обеспечивает подъемную систему для выполнения вышеописанного способа. Способ управления подъемной системой и подъемная система позволяют системе управления и поддерживающему устройству взаимодействовать друг с другом, чтобы автоматически отрегулировать крутящий момент двигателя, так чтобы эффективность работы подъемной системы и срок службы троса улучшились, и безопасность процесса подъема была обеспечена. 2 н. и 6 з.п. ф-лы, 6 ил.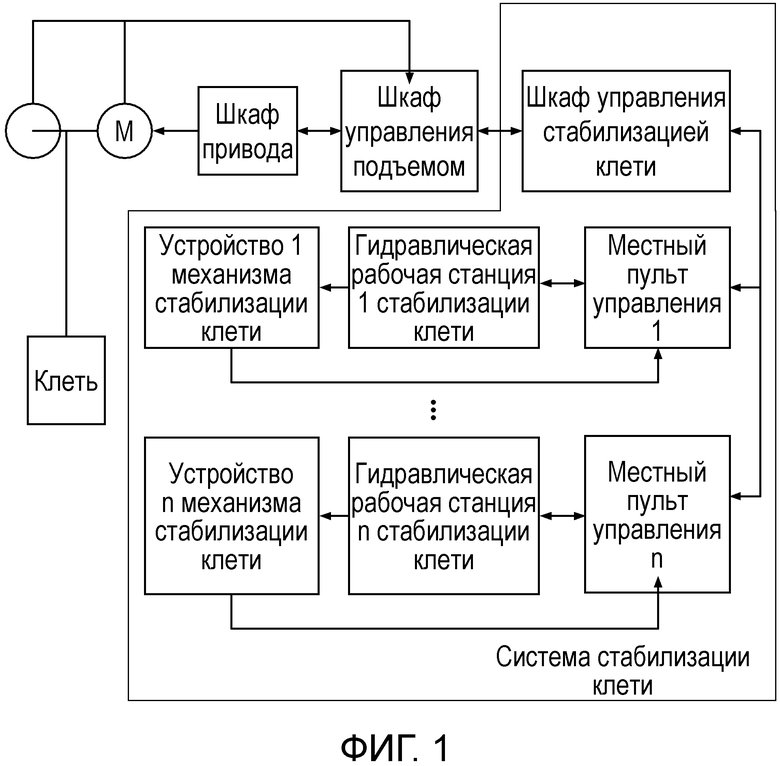
1. Способ управления подъемной системой, содержащей подъемный двигатель для подъема подъемника (10) и поддерживающее устройство для поддерживания подъемника (10), когда подъемник достигает заданного положения,
отличающийся тем, что подъемник перемещают вниз к поддерживающему устройству и затем поддерживают посредством поддерживающего устройства, при этом подъемная сила подъемного двигателя регулируется до заданного значения, которое превышает нулевое значение, но меньше собственного веса подъемника (10).
2. Способ управления подъемной системой по п.1, в котором поддерживающее устройство содержит посадочное устройство для посадки подъемника (10) и фиксирующее устройство для фиксации подъемника (10), при этом способ дополнительно содержит следующие этапы, на которых:
при опирании подъемника (10) на посадочное устройство фиксирующее устройство фиксирует подъемник (10).
3. Способ управления подъемной системой по п. 1 или 2, в котором заданное значение для подъемной силы находится в диапазоне от 50% до 80% собственного веса подъемника (10).
4. Подъемная система, отличающаяся тем, что она выполнена с возможностью осуществления способа по любому из пп.1-3.
5. Подъемная система по п.4, в которой поддерживающее устройство содержит по меньшей мере четыре группы соединительных штоковых механизмов, симметрично расположенных относительно шахтного ствола, причем каждая группа соединительного штокового механизма содержит посадочный соединительный шток (1) для клети, посадочный плунжер (5) для клети и посадочный элемент (6) для соединительного штока;
как поддерживающий конец посадочного соединительного штока (1) для клети, так и посадочный плунжер (5) для клети установлены на посадочный элемент (6) соединительного штока, который подлежит креплению к стенке (12) шахтного ствола (11), при этом
посадочный плунжер (5) для клети соединен с посадочным соединительным штоком (1) для клети и выполнен с возможностью складывания для перемещения посадочного соединительного штока (1) для клети из шахтного ствола (11) или в шахтный ствол (11).
6. Подъемная система по п.5, в которой каждая группа конструкции соединительного штока поддерживающего устройства дополнительно содержит фиксирующий соединительный шток (2) для клети и фиксирующий плунжер (4) для клети, и как поддерживающий конец фиксирующего соединительного штока (2) для клети, так и фиксирующий плунжер (4) для клети установлены на посадочном элементе (6) соединительного штока, при этом
фиксирующий плунжер (4) для клети соединен с фиксирующим соединительным штоком (2) для клети и выполнен с возможностью складывания для фиксации или расфиксации подъемника (10) при помощи фиксирующего соединительного штока (2) для клети.
7. Подъемная система по п.5 или 6, в которой подъемная система дополнительно содержит шкаф управления подъемом и шкаф управления стабилизацией клети, при этом шкаф управления стабилизацией клети сообщен со шкафом управления подъемом для осуществления взаимодействия между поддерживающим устройством и подъемным двигателем во время процесса размещения клети и освобождения клети.
8. Подъемная система по п.7, в которой подъемная система дополнительно содержит гидравлическую рабочую станцию стабилизации клети и местный пульт управления, при этом шкаф управления стабилизацией клети сообщен с местным пультом управления для управления гидравлической рабочей станцией стабилизации клети и поддерживающим устройством и обеспечения обратной связи по положению платформы, на которой останавливается подъемник (10).
| Пакер поддержания пластового давления | 2024 |
|
RU2839160C1 |
| CN 102556814 A, 11 | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| CN101643174 A, 10.02.2010 | |||
| Способ количественного определения производных фенолов с @ -алкильными группами | 1982 |
|
SU1057816A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство управления посадочными кулаками для клети шахтной подъемной установки | 1982 |
|
SU1021654A1 |

